Изобретение относится к области бурения нефтяных и газовых скважин и может быть использовано для оптимального управления процессом бурения.
Известен способ адаптивного управления процессом бурения скважин по патенту РФ №2495240, МПК E21B 44/00, опубл. 04.05.2012, включающий использование модели процесса бурения, технический результат в которой достигается оперативным управлением коэффициентами этой модели, значения которых определяются минимальными вибрациями бурильной колонны.
Недостатками способа являются предварительное построение модели процесса бурения, привязанное конкретно к данной геологической структуре, знанию ее геологического строения и твердости пород, а также проведение бесконечного множества скважинных измерений. Использование детерминированной модели часто приводит к ее непредсказуемому обновлению и, как следствие, низкой точности управления. Использование сложной наземной аппаратуры и скважинной системы измерения забойных параметров создает дополнительные, иногда нерешаемые задачи.
Известен способ управления работой в скважине и система бурения скважины по патенту РФ 2244117, МПК E21B 44/00, опубл. 10.01.2005. Техническая реализация известного способа осуществляется с использованием вычислительной модели процесса бурения, представляющей комбинированное влияние условий на забое скважины и работы колонны бурильных труб. Модель процесса бурения непрерывно обновляется результатами скважинных измерений, производимых в ходе операции бурения. На основании непрерывных измерений вырабатываются и исполняются различные сценарии управления для передачи данных в систему управления наземным оборудованием.
Недостатком способа является необходимость предварительного построения модели процесса бурения и ее коррекция текущими значениями параметров бурения. Однако колонна бурильных труб, как объект управления, является неустойчивой [4], и текущие параметры бурения изменяются по кривым колебательного процесса, что исключает возможность их использования для целей коррекции.
Известен способ и устройство для уменьшения колебаний прилипания-проскальзывания колонны бурильных труб по патенту РФ №2478781, МПК E21B 44/00, опубл. 10.04.2013, патентообладатель НЭШНЛ ОЙВЕЛЛ ВАРКО (US), в котором демпфирование колебаний осуществляется путем использования бурильного механизма изменения веса бурильной колонны и регулирование скорости вращения бурильного механизма с использованием ПИ-регулятора. Недостатком предложенного изобретения является сложность настройки ПИ-регулятора с использованием скважинных измерений. Включение ПИ-регулятора в цепь управления бурильной колонной повышает порядок астатизма замкнутой структуры, что еще более ухудшает условия устойчивости системы управления. Использование полосы оптимальных частот не позволяет реализовать надежное управление с углублением скважины.
Наиболее близким по сущности предлагаемого изобретения является способ управления колебаниями в буровом оборудовании и система для его осуществления по патенту РФ 2087701 С1, МПК E21B 44/00, опубл. 20.08.1997, где колебания в буровом оборудовании регулируются посредством определения потока энергии через оборудование как произведение «поперечной» переменной и «сквозной» переменной. Причем колебания одной переменной измеряются, а поток энергии регулируется путем изменения другой переменной в ответ на измеряемые колебания упомянутой одной переменной. В качестве переменных величин для определения потока энергии используются напряжение, умноженное на ток электрического привода, давление, умноженное на скорость потока гидравлического привода, или крутящий момент, умноженный на угловую скорость вала вращательного привода.
Способ управления колебаниями в буровом оборудовании реализуется системой, содержащей средства измерения колебаний продольной и поперечной переменной, связанные со средствами контроля истока энергии через буровое оборудование и средство регулирования крутильных колебаний оборудования путем поддержания потока энергии через буровое оборудование на заданном уровне. Дополнительно система снабжена средствами определения крутящего момента приводного двигателя и средствами его регулирования.
Предпосылки изобретения.
Бурение нефтяной или газовой скважины включает в себя создание ствола скважины значительной глубины, часто в несколько километров по вертикали. Бурильная колонна содержит буровое долото на своем нижнем конце и звенья трубы, свинченные вместе. Бурильную колонну вращает бурильный механизм на поверхности, колонна в свою очередь вращает долото для проходки скважины. Бурильный механизм, обычно верхний привод или ротор, по существу является массивным маховиком. Бурильная колонна является гибкой конструкцией и во время бурения может закручиваться под действием крутящего момента, запасая потенциальную энергию. При достаточном ее запасе наблюдается прокручивание низа колонны (проскальзывание), т.е. наблюдается процесс перехода потенциальной энергии в кинетическую.
На основании работ Перминова Б.А., Перминова В.Б., Заикина С.Ф., Быкова И.Ю. [1-5], возникающие в результате превращения энергии крутильные автоколебания бурильной колонны определяют колонну как неустойчивый объект управления. Это положение подтверждается и анализом структурной схемы бурильной колонны [4], из которого следует, что как объект управления колонна бурильных труб является структурно неустойчивым звеном. Это означает, что процесс бурения скважины всегда сопровождается автоколебаниями бурильной колонны, что существенно уменьшает механическую скорость проходки скважины, увеличивает износ бурового инструмента. Приведенные способы оптимизации управления процессом бурения не позволяют эффективно демпфировать автоколебания бурильной колонны, сопряжены со сложностями скважинных измерений, а управление с использованием моделирования не выдерживает критики, так как невозможно создать модель структурно неустойчивого объекта управления.
Задачей изобретения является устранение недостатков демпфирования автоколебаний бурильной колонны в процессе бурения и предложение дешевого и разумного способа управления процессом бурения и системы для его осуществления, обеспечивающих регулирование автоколебаний в оборудовании для бурения.
Сущность изобретения.
Автоколебания бурильной колонны в процессе углубления скважины демпфируются посредством определения градиента изменения крутящего момента на приводе буровой установки как частного от деления скорости изменения мощности привода ротора буровой установки на скорость изменения частоты вращения вала привода. Причем по знаку градиента изменения крутящего момента на приводе ротора буровой установки частота вращения вала привода, а, следовательно, и бурильной колонны либо увеличивается, либо уменьшается в пределах определяемых геологической структурой разбуриваемой породы.
Способ управления процессом бурения, позволяющий эффективно демпфировать автоколебания бурильной колонны, реализуется системой бурения, содержащей средства измерения градиента изменения крутящего момента, блока определения знака градиента, регулятора, обеспечивающего изменение частоты вращения вала привода с задатчиком максимальной и минимальной частоты вращения, определяемой геологической структурой породы.
Способ управления процессом бурения в соответствии с настоящим изобретением заключается в регулировании частоты вращения вала привода ротора буровой установки, по измеренному значению градиента изменения крутящего момента и знаку этого градиента.
Способ управления процессом бурения в соответствии с настоящим изобретением основан на понимании того, что срыв установившегося процесса бурения и возникновение автоколебаний происходит в результате воздействия на бурильную колонну какого-либо возмущения, например резкого изменения момента сопротивления. Это приводит к динамическому набросу крутящего момента на валу привода ротора буровой установки вследствие изменения мощности привода и частоты вращения вала привода. Если измерять скорости изменения мощности привода и частоты вращения с использованием дифференцирующих фильтров, работы Перминова Б.А., Перминова В.Б. [1-3], то градиент изменения крутящего момента можно определить соотношением:
где  - скорость изменения мощности привода ротора буровой установки, Вт/с;
- скорость изменения мощности привода ротора буровой установки, Вт/с;
 - скорость изменения частоты вращения вала привода, об/с;
- скорость изменения частоты вращения вала привода, об/с;
gradM - градиент изменения крутящего момента на валу привода, Нм/об.
Эффективный способ управления процессом бурения состоит в определении градиента изменения крутящего момента на валу привода, который определяется как частное от деления скорости изменения мощности привода ротора буровой установки на скорость изменения частоты вращения вала привода, определении знака градиента крутящего момента и регулировании частоты вращения вала привода по знаку градиента при постоянном оптимальном значении осевой нагрузки.
Система для осуществления способа управления процессом бурения в соответствии с настоящим изобретением включает в себя канал измерения скорости изменения мощности привода ротора буровой установки, канал измерения скорости изменения частоты вращения вала привода, делитель результатов измерения скорости изменения мощности на скорость изменения частоты вращения вала привода, распознаватель знака градиента изменения крутящего момента на валу привода, регулятор, обеспечивающий изменение частоты вращения вала привода.
Изобретение поясняется чертежом фиг. 1, фиг. 2.
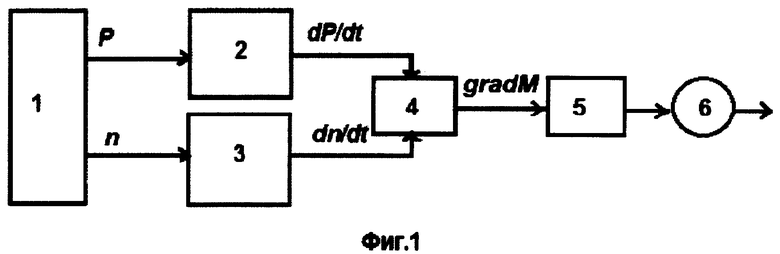
На фиг. 1 представлена схема измерения градиента изменения крутящего момента на валу привода, знака градиента и регулятора, обеспечивающего изменение частоты вращения вала привода по определенному знаку градиента.
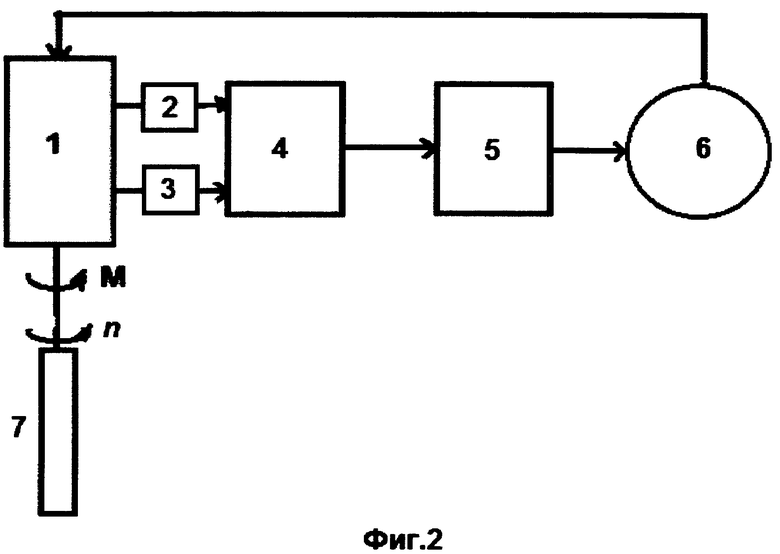
На фиг. 2 представлена общая структура системы управления процессом бурения.
На фиг. 1 показано схематичное изображение привода ротора буровой установки 1, включающего в себя непосредственно привод с выходным валом вращения, движитель привода мощностью Р, это может быть электродвигатель, дизель, газотурбинный двигатель и т.д., выходной вал которого вращается с частотой вращения n, причем привод имеет устройство изменения частоты вращения, канал измерения скорости изменения мощности 2, канал измерения скорости изменения частоты вращения вала 3, блок деления 4, с помощью которого определяется gradM, как функции  , определитель знака gradM 5 и регулятор 6, обеспечивающий изменение скорости вращения вала привода по определенному знаку градиента.
, определитель знака gradM 5 и регулятор 6, обеспечивающий изменение скорости вращения вала привода по определенному знаку градиента.
Определитель знака gradM представляет собой фазочувствительный усилитель, выходной сигнал которого изменяет фазу на выходе в зависимости от знака сигнала gradM; в зависимости от фазы выходного сигнала, регулятор 6, например реверсивный двигатель, воздействует на исполнительные органы, которые в свою очередь изменяют угловую скорость выходного вала привода, который через передаточный механизм подключается к колонне бурильных труб с породоразрушающим инструментом 7.
На фиг. 2 показано схематическое изображение структуры управления процессом бурения, включающей в себя непосредственно привод ротора буровой установки 1, колонну бурильных труб с буровым инструментом 7, канал измерения скорости изменения мощности Р привода 2, канал измерения скорости изменения частоты вращения вала n привода 3, блок деления 4, определитель знака градиента 5, регулятор частоты вращения 6.
Бурильная колонна как объект автоматического управления [4] представляет собой структурно-неустойчивое звено с астатизмом третьего порядка. Для реализации устойчивого процесса бурения требуется коррекция частотных характеристик этого объекта [5], которая может быть реализована различными способами: путем последовательного подключения дифференцирующих звеньев, путем параллельной коррекции, либо путем введения компенсирующей обратной связи. Так как параллельная коррекция и коррекция с использованием обратной связи невозможны вследствие большой длины колонны бурильных труб и сложности использования ствола скважины, то наиболее эффективной является последовательная коррекция. В качестве такого корректирующего дифференциального звена используются дифференцирующие фильтры, введенные в каналы измерения мощности и угловой скорости. Кроме того, введение дифференцирующих фильтров способствует полному устранению статических ошибок измерения и управления, что существенно повышает точность измерения и управления.
В блоке деления 4 производится деление результата измерения  на результат измерения
на результат измерения  , что определяет на выходе блока деления
, что определяет на выходе блока деления  . В зависимости от знака vP или vn gradM может быть больше нуля или меньше нуля, что определяется определителем знака gradM 5, например, фазочувствительным усилителем, фаза выходного напряжения которого определяется знаком gradM. К выходу определителя знака gradM 5 подключен регулятор частоты вращения вала привода 6, например, реверсивный двигатель, направление вращения вала которого определяется фазой выходного напряжения фазочувствительного усилителя, следовательно gradM. Регулятор частоты вращения непосредственно воздействует на исполнительные органы привода 1.
. В зависимости от знака vP или vn gradM может быть больше нуля или меньше нуля, что определяется определителем знака gradM 5, например, фазочувствительным усилителем, фаза выходного напряжения которого определяется знаком gradM. К выходу определителя знака gradM 5 подключен регулятор частоты вращения вала привода 6, например, реверсивный двигатель, направление вращения вала которого определяется фазой выходного напряжения фазочувствительного усилителя, следовательно gradM. Регулятор частоты вращения непосредственно воздействует на исполнительные органы привода 1.
Литература
1. Перминов Б.А. Устройство для измерения крутящего момента на роторе буровой установки. АС СССР №1691690, 1991.
2. Перминов Б.А., Сабов В.В. Устройство для измерения крутящего момента на роторе буровой установки. АС СССР №1695157, 1991.
3. Перминов Б.А., Перминов В.Б. Устройство для измерения крутящего момента на роторе буровой установки. АС СССР №1697157, 1991.
4. Быков И.Ю., Заикин С.Ф., Перминов Б.А. Колонна бурильных труб в процессе углубления скважины как объект автоматического регулирования. // Строительство нефтяных и газовых скважин на суше и на море. - М.: ОАО «ВНИИОЭНГ», 2012. - №10. С. 13-17.
5. Быков И.Ю., Заикин С.Ф., Перминов Б.А. Оптимизация управления процессом углубления скважины. // Строительство нефтяных и газовых скважин на суше и на море. - М.: ОАО «ВНИИОЭНГ», 2012. - №10. С. 17-21.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569656C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569659C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2588053C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ КОЛЕБАНИЙ ПРИЛИПАНИЯ-ПРОСКАЛЬЗЫВАНИЯ В БУРИЛЬНОЙ КОЛОННЕ | 2008 |
|
RU2478781C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАСЧЕТА МГНОВЕННОЙ СКОРОСТИ ВРАЩЕНИЯ КОМПОНОВКИ НИЗА БУРИЛЬНОЙ КОЛОННЫ | 2009 |
|
RU2478782C2 |
| СИСТЕМА И СПОСОБ ОСЛАБЛЕНИЯ ПРЕРЫВИСТОГО ПЕРЕМЕЩЕНИЯ БУРИЛЬНОЙ КОЛОННЫ | 2015 |
|
RU2667553C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАСЧЕТА МГНОВЕННОЙ СКОРОСТИ ВРАЩЕНИЯ КОМПОНОВКИ НИЗА БУРИЛЬНОЙ КОЛОННЫ | 2012 |
|
RU2518699C1 |
| СПОСОБ ОПТИМИЗАЦИИ БУРЕНИЯ С ЗАБОЙНЫМ БЕСКОМПРЕССОРНЫМ ДВИГАТЕЛЕМ | 2011 |
|
RU2572629C2 |
| СПОСОБ И СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ БУРЕНИЕМ СКВАЖИНЫ | 2019 |
|
RU2697988C1 |
| ОПТИМИЗИРОВАННОЕ БУРЕНИЕ | 2011 |
|
RU2572093C2 |
Изобретение относится к области бурения нефтяных и газовых скважин и может быть использовано для оптимального управления процессом бурения. Техническим результатом является упрощение структуры системы управления, увеличение точности управления, оптимизация систем измерения, снижение вибраций бурильной колонны и как результат увеличение скорости проходки скважины. Способ включает измерение скорости изменения мощности привода ротора буровой установки, измерение скорости изменения частоты вращения вала привода. Причем в канал измерения мощности привода ротора буровой установки и в канал измерения частоты вращения вала привода введены операция дифференцирования и операция деления результатов измерения скорости изменения мощности привода ротора буровой установки на результат измерения скорости изменения частоты вращения вала привода, определяющая градиент изменения крутящего момента на валу привода ротора буровой установки, при этом регулирование частоты вращения вала привода проводится по знаку градиента изменения крутящего момента на валу привода ротора буровой установки. 2 н.п. ф-лы, 2 ил.
1. Способ управления процессом бурения, включающий измерение скорости изменения мощности привода ротора буровой установки, измерение скорости изменения частоты вращения вала привода, отличающийся тем, что в канал измерения мощности привода ротора буровой установки и в канал измерения частоты вращения вала привода введены операция дифференцирования и операция деления результатов измерения скорости изменения мощности привода ротора буровой установки на результат измерения скорости изменения частоты вращения вала привода, определяющая градиент изменения крутящего момента на валу привода ротора буровой установки, при этом регулирование частоты вращения вала привода проводится по знаку градиента изменения крутящего момента на валу привода ротора буровой установки.
2. Система управления, осуществляющая способ управления процессом бурения, включает привод ротора буровой установки, колонну бурильных труб с породоразрушающим инструментом, измеритель скорости изменения мощности привода ротора буровой установки, измеритель скорости изменения частоты вращения вала привода, отличающаяся тем, что выходы измерителей скоростей изменения мощности и частоты вращения подключены к входам блока деления, на выходе которого определяется градиент изменения крутящего момента, причем выход блока деления подключен к определителю знака градиента изменения крутящего момента на валу привода, который подключен к регулятору, обеспечивающему изменение частоты вращения вала привода ротора буровой установки.
| СПОСОБ УПРАВЛЕНИЯ КОЛЕБАНИЯМИ В БУРОВОМ ОБОРУДОВАНИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2087701C1 |
| Устройство для контроля крутящего момента на роторе электродвигателя буровой установки | 1988 |
|
SU1539548A1 |
| Устройство для измерения крутящего момента на роторе буровой установки | 1989 |
|
SU1695157A1 |
| Устройство для моделирования статических и динамических характеристик привода координатно-шлифовального станка | 1986 |
|
SU1437884A2 |
| US 6785641 B1, 31.08.2004. | |||

