1 зобретр.ние относится к автоматизаиии пауч иът исследований механических cMr.TftM к может быть использовано в системах автоматизированного пройктипотгядатя привода, пвигаталей и их v sj.no к бабка.м двухбабочного шлифоиалького станка.
Цель изобпетйН к-тя - pac riiJiieHHS rbvKKiTF.OHanbTrbTx: возможностей яа с/чр.т мопегтипояяния крйплеккя бябки шпит- - целя „
Н.я чр.птр.тк е тэгдставлр.но устройсТ во пля: мопепированич статичр.ских и гп т-тд1 лт,гиер,гг|-тх; характстшстик п оигэопа тгоочликатно-тплифоралького станка,
УСТТ50ЙСТВО соцержит двухбабочный илигЬо.тал.ьРый ста.кок 1.; обдабатывае- цр.талт, 2,. электродвигатель 3 по- пто ниого тока, ременнузо передачу
4, соеачненную с ротором пшинд.еля г.тАИТ а. cyiNi - aToph 5-; „ интйграторы 8 I . усилители 12 - 14 блок ). ;- постоянного напряжения, пряобоазователь 16
5o.fp,HTa сопротивления вралденио в на пт)пкение« пояобразователъ 17 скорое- г вра.лгр.К Тя ротона двигателя 3 в на- пряженмо. блок 18 писЬференгшрования обтэядкн нньтх в обржй вычислительный блок 19 моделирования момента кнзр- 7;г.7к ротопа лшиндвля К привода, а fa.)Tca погледователвно соединеш-тые г.ум матор 0, первый вкод которого соединен с вьшоцом интегратора 9 блока 19 а второй с выходом уснлителя 14 бло va 19« и 7/штеграторы 21 к 22,, выход последнего ия которых соединен с третьем т тгодом сумматора 20 чероз сумма ТОО 23. а . интегратора 21 с четрертьм входом сумматора 20 через слг.гматор 24,-. сумматор 25, вкодамк сое дэтненкт- с выкодаки c-vrMMaTOpoB 20, 23 3, .,А „ усклЕтд.пь .6 моятностИг: чэреэ KOTopbT i вьтхоц суг-шатора 25 соадкнек с входом длр.ктроматнмтного вибратора 27- подБи кной частью дрикрепленкого к бабке - а статором к направ-дк-ощим 28„ датчик 29 скогюсти, прихредлекный ж части электромагш-гткого вибратора, я вьш.од которого непосредствеш-го соединен с вторым нкoдo з с. матора к через титегратор 30 - с вторьм входом cyi iaTopa 23„
Устройство работает г.лед гкшгим образом,
Станок 1 и обрябатьшаемая деталь 2 S системе являются реальными. Моде, доЕВвргается привод.
т,е„ двигатель привода и упругая связ между роторами шпинделя и Двигателя и уяел крепления двигателя к бабке, Электродвигатель 3 постоянного тока с.л /жт-тт исполнит ел ьт,гм механт-тя- мом олукатурной 1: 1опели и не является составной частью моделируемой час- прияода, Он с помо1пьт ременной пе™ ре. вьтдает угловое, перемещение ротору тш1инделя j происрп.иопапьное вхопкому сигналу, поступаюшет-Гу с да интегратора 8„ Сигна.л на выхо.це интегр атор.а 8 формируется решением дифференциального уравнения, модели- руютиего ynpyr ifjo ср..язь кежду ротоп. пкнце. моделируемого .дя ггрирола,. кото ое .яягае т.я Р Еипе ,.. V
- r/ CODOCTb и угловое пе- ремежет не потора шп-ин- деля соответственно; .и (pj - скорость и уг.ггорое перемешеит-ie ротот)а моде.ли- руемого двигателя при- во.да;
а - коэффициент. продо1Л.тио- кэльныч жесткости упру-- гой связи межд7/ роторами шдиндел.я и моделируемого двигателя.
Момент сопротивления М,, , пропорциональный вращен1-гю со стороны ротора г пиндедя, измеряется с помощью преобразовате,гтя 16, работающего,, например, на основе теняодатчиха. фих- с.ируюиего величину скруС(;изания ротора э.лактродвигателя 3 Сигн;.л с выхода преобвазовате.дя 16 поступает на вход cyMf jaTopa 5 через весовой коэф- фип.иент с,, (уравнеаие (1). на .аоупле входы сумматора 5 подаютс.я сш- налы. пропердкональные ср,,., а, (J,, и а/ср . Поэтом г на входе сумматора 5 фоумиру- . ется сигна.д, равный Lf, э я на его выходе сигнал -tips, который nocTv-пает на вход интегратора 8. на. выходе которого фор№-1руется сигнал и)р . досту- паюший на вход электродзигате„д.я 3 Он также .пос-птает на вход уси.ш-гтеля 52, на выходе которого формируется сигнал -( который через весовой коэф|)И. а, в качестве сигнала а ерр постуттает на вход сумматора 5, Чтобы решение уравления ( ) происхо- Д1-1ПО пpивeдeннь ;v5 способом, на зходы
сумматора 5 должны поступить сигналы, пропорциональные cf. и а,ф. .
Чтобы полу п-1ть упомянутые сигналы, необходимо решить дифференциальное уравнение движения ротора двигателя, которое имеет вид
(2)
f.(
гдец.д
ускорение углового перемещения ротора регулируемого двигателя привода; Мд - движущий момент моделируемого двигателя;
Cj - весовой коэффициент; 15 а - коэффициент, пропорциональный жесткости упругой связи между роторами шпинделя и его моделируемого двигателя с учетом момента инерции ро- 20 тора длшгателя.
Для этого на вход сумматора 6 по- дается сигнал с выхода интегратора 8, пропорциональный величине q , через весовой коэффициент а (уравнение 25 (2), а также - a.) и . При этом на входе сум 1атора 6 формируется сигнал, равный с рд , а на его выходе - сигнал (fд. Сигнал с выхода сумматора 6 поступает на вход интегратора 9, 30 на выходе которого образуется сигнал , который поступает непосредствен(Од - угловая скорость холос того хода двигателя; Rj - коэффицкент, пропорцио 5нальный постоянной вре
мени моделируемого дви гателя .
Для этого на вход сумматора 7 под ется сигнал с выхода интегратора 9, 0 пропорциональный срд, через весовой коэффициент Ь, а с выхода блока 5 постоянного напряжения подается напр
жение, численно равное - Ъи. Кроме того, на вход сумматора 7 подается сигнал, пропорциональный . Таким образом, на входе сумматора 7 формируется вел гчина - Мд (уравнетгие (З), а на выходе - сигнал Мд, который подается па интегратор 10, с которого на вход усилителя 4, на выходе которого образуется сигнал М., поступающий через весовой коэффициент а на вход сумматора 7, чем заканчивается формирование на его входе сигна ла, пропорционального М,, а также на вход сумматора 6 через весово ко эффициент Cj, где заканчивает формирование сигнала на входе сумматора 6 пропорционального .
Taки образом, измеьгением коэффициентов а,, а, aj, с, , с,., и b можно осуществить изменение параметров статической и динамической характери
но на вход сумматора 5, а также на вход интегратора П, на выходе которого формируется сигнал -ср.. Он посту- тик моделируемого двигателя привода, пает через весовой коэффициент а на ....о ,„,..,,„„ „ . ,гпвход сумматора 6, а также на вход усилителя 13, на выходе которого формируется сигнал Cf., который через весо.вой коэффициент а поступает на вход сумматора 5 и заканчивает формирование на его входе сигнал, пропорциональный с Ср .
Чтобы полностью решить уравнение (2), необходимо формировать сигнал , который может быть получен решением уравнения, связывающего статические и динамические характеристики моделируемого двигателя:
его момента инерции и жесткости упругой связи между роторами шпинделя и моделируемого двигателя. Так как электродвигатель.3 постоянного тока
40 исполняет функции задания углового перемещения ротору шпинделя по сигна лу с интегратора 8, т.е.срр , которое зависит от величи1сы заданного напряжения на выходе блока 15 постоянного
45 напряжения величина ЪсОд по уравнению (3), а также от всех упомянутых параметров (а, а, а,, с,, с и Ъ) и от момента сопротивления со стороны ротора шпинделя, поступающего с блока 16, то оно (угловое перемещение) зависит от процесса резания при обработке детали 2. Чтобы создать эффект изменения момента инерции ротора шпинделя преобразователем 17, измеряется скорость вращения электродвигателя 3. Сигнал с выхода преобразователя 17, пропорциональный упомянутой скорости, поступает на блок 18 дифференцирования, на вьгМд+а Мд+Ъ(срд-сОо)-0, де Мд и Мд
(3)
и со. производная по времени и момент, развиваемьй моделируемым двигателем привода;
параметры статической характеристики двигателя;
(Од - угловая скорость холостого хода двигателя; Rj - коэффицкент, пропорцио- 5нальный постоянной времени моделируемого двигателя .
Для этого на вход сумматора 7 подается сигнал с выхода интегратора 9, 0 пропорциональный срд, через весовой коэффициент Ь, а с выхода блока 5 постоянного напряжения подается напряжение, численно равное - Ъи. Кроме того, на вход сумматора 7 подается сигнал, пропорциональный . Таким образом, на входе сумматора 7 формируется вел гчина - Мд (уравнетгие (З), а на выходе - сигнал Мд, который подается па интегратор 10, с которого - на вход усилителя 4, на выходе которого образуется сигнал М., поступающий через весовой коэффициент а на вход сумматора 7, чем заканчивается формирование на его входе сигнала, пропорционального М,, а также на вход сумматора 6 через весово коэффициент Cj, где заканчивает формирование сигнала на входе сумматора 6, пропорционального .
Taки образом, измеьгением коэффициентов а,, а, aj, с, , с,., и b можно осуществить изменение параметров статической и динамической характерис
тик моделируемого двигателя привода, ....о ,„,..,,„„ „ . ,гптик моделируемого двигателя привода, ....о ,„,..,,„„ „ . ,гпего момента инерции и жесткости упругой связи между роторами шпинделя и моделируемого двигателя. Так как электродвигатель.3 постоянного тока
исполняет функции задания углового перемещения ротору шпинделя по сигналу с интегратора 8, т.е.срр , которое зависит от величи1сы заданного напряжения на выходе блока 15 постоянного
напряжения величина ЪсОд по уравнению (3), а также от всех упомянутых параметров (а, а, а,, с,, с и Ъ) . и от момента сопротивления со стороны ротора шпинделя, поступающего с блока 16, то оно (угловое перемещение) зависит от процесса резания при обработке детали 2. Чтобы создать эффект изменения момента инерции ротора шпинделя преобразователем 17, измеряется скорость вращения электродвигателя 3. Сигнал с выхода преобразователя 17, пропорциональный упомянутой скорости, поступает на блок 18 дифференцирования, на вьг
5
ходе которого формируется сигнал, пропорциональный ускорению движения ротора двигателя,, а тем самым и ишин- деля станка. Сигнал с выхода блока 18 поступает на вход сумматора 5 через заданный коэффициент К, Величина коэффициента К определяет величину гдес|| упомянутое ускорение; К - добавочный момент инерции. Таким образомS сигнал с выхода блока 18 суммируется с сигналом, поступающим с вьЕХода преобразователя 16, и создает эффект изменения момента инерции ротора шпинделя.
Для моделирования влияния проектируемого двигателя и его подвески на шлифовальнуто бабку сигналы с выхода интегратора 9 и усилителя 14 блока 19, пропорциональные соответственно координате перемещения ротора моделируемого двигателя и развиваемому моменту, поступают на первый и второй входы сумматора 20, С помощью последовательной цепи: сумматор 20, интеграторы 2Ги 22 и сумматор 23, а также с помощью сз мматора 2Д осуществляется решение уравнения вида
тх+С(х)+Н(-)К,ц д+К Мд, (4)
где m - общая масса двигателя моделируемого привода; Hj С - соответственно коэффициенты
трения и жесткости узла крепления моделируемого двигателя к бабке; коэффициенты, оценивающие
{
7884
нап -X,
а на выходе интегратора 22 - сигнал X, Таким образом, на входы сумматора 25 поступают сигналы, пропорц циональные (x-t) и (х-Ь). Так как зе- совые коэффициенты усилителя 25 для сигналов ( и (х-) соответственно равны С и Н, то на его выходе формируется сигнал, который далее через
10 усилитель 26 тока подается на вход
электромагнитного вибратора 27, пропорциональный силе, передаваемой моделируемым двигателем через упруго вязкий узел крепления к бабке с парамет-15 рами С и Н, Эту силу, которая пропорциональна сигналу, поступаюгдему с вь -- хода усилителя 26 тока, и создает электродинамический вибратор 27. Таким образом, определяя во время моде20 лирования привода по полученным параметрам характеристику двигателя,, а так7-.:е s. и с и задавая по справочным данш-1М массу двигателя ш, изменяя весовые коэффициенты сумматоров 20 и 25, можно произвольно менять параметры упруго вязкого крепления двигателя к бабке. Тем самым, наблюдая за процессом обработки детали, можно выбрать его таким, чтобы он максимально соответствовал динамической системе станка в целом, а также корре- гировать моделируемые параметры привода и момента инерции ротора шпинделя, чтобы система в целом обеспечи35 вала наибольшую точность обработки. Кроме того, наличие направляюп1зих 28 обеспечивает возможность учитывать
25
30

Изобретение относится к автоматизации научных исследований механических систем и может быть использовано в системах автоматизированного проектирования привода, двигателей и узлов их крепления к бабкам двухба- бочного шлифовального станка. Цель изобретения - расширение функциональных возможностей устройства за счет моделирования крепления бабки шпинделя. Цель достигается введением в устройство дополнительных сумматоров, интеграторов, датчика скорости, усилителя мощности и электромагнитного вибратора. При работе устройства по сигналам, пропорциональным координате вращения ротора и развиваемому моменту проектируемого двигателя, а также с учетом массы двигателя, с помощью вычислительного блока с учетом колебаний бабки формируется сигнал, эквивалентный влиянию такого двигателя, прикрепленного через упруговяз- кую связь к бабке, как реакция влияния двигателя, которая реализуется с помощью электромагнитного вибратора, Изменением коэффициентов в вычислительном блоке моделируются параметры узла крепления. Также может быть осуществлено моделирование влияния и узла крепления двигателя второго шпинделя. 1 ил. (Л
усилия, возникающие от нерав- положение крепления двигателя к бабке номерности вращения ротора и согласовать это с остальными пара- и изменения момента вращения,40 метрами, действующие перпендикулярно
Таким образом, с помощью устройства моделируется не только структура
оси шпинделя.
Для этого на вход сумматора 24 поступает сигнал с датчика 29 скорости перемещения бабки шпинделя в точке крепления электромагнитного вибратора 27, а на второй вход сумь атора 23 он же передается через интегратор 30, Таким образом;, на входе сумматора 20
и параметры привода станка, но и узел 45 крепления двигателя к бабке.
Аналогично с помощью устройства может быть смоделировано влияние проектируемого двигателя на крутильформируются сигналы, пропорциональные 50 колебания бабки плтинделя и, сле- -Мд, х-, х- (уравнение (4). довательно, на качество обработки Так как весовые коэффициенты сумма то- двухшпиндельным станком,, При
двухшпиндельным станком,, При этом аналогично рассмотренному принципу формируется не сила, а момент, про- (4), 55 порциональный моменту, создаваемому
1
m
С
m
pa соответственно равны -Н™
- , то, как следует из уравнения la
1 - - на его входе формируется сигнал, равньй -X, а на выходе - сигнал х, на, выходе интегратора 21 формируется сиг(4),
и параметры привода станка, но и узел 45 крепления двигателя к бабке.
Аналогично с помощью устройства может быть смоделировано влияние проектируемого двигателя на крутиль50 колебания бабки плтинделя и, сле- довательно, на качество обработки двухшпиндельным станком,, При
двухшпиндельным станком,, При этом аналогично рассмотренному принципу формируется не сила, а момент, про- 55 порциональный моменту, создаваемому
проектируемым двигателем, в отношении параметров С и Н, который подается на возбудитель крутильных колебаний вместо вибратора 27.
Рассмотпр.иным образом может быть осу цествлр,ио я. еобъ.мпютцей моделиро- вяние привода и v:i,na крапления дви- гател.я к бябке РТОПОГО тпкнделя.
Выполийние устройства позволяет ; стядии лроектипованйя станка ксклго ччть проявление впедного влияния источников колебян гй прироцов. увеличить точность обработка- сверл и их пяботостоГгкость кя 35%.
i) о т м V Ли и я о б р е т е г и к
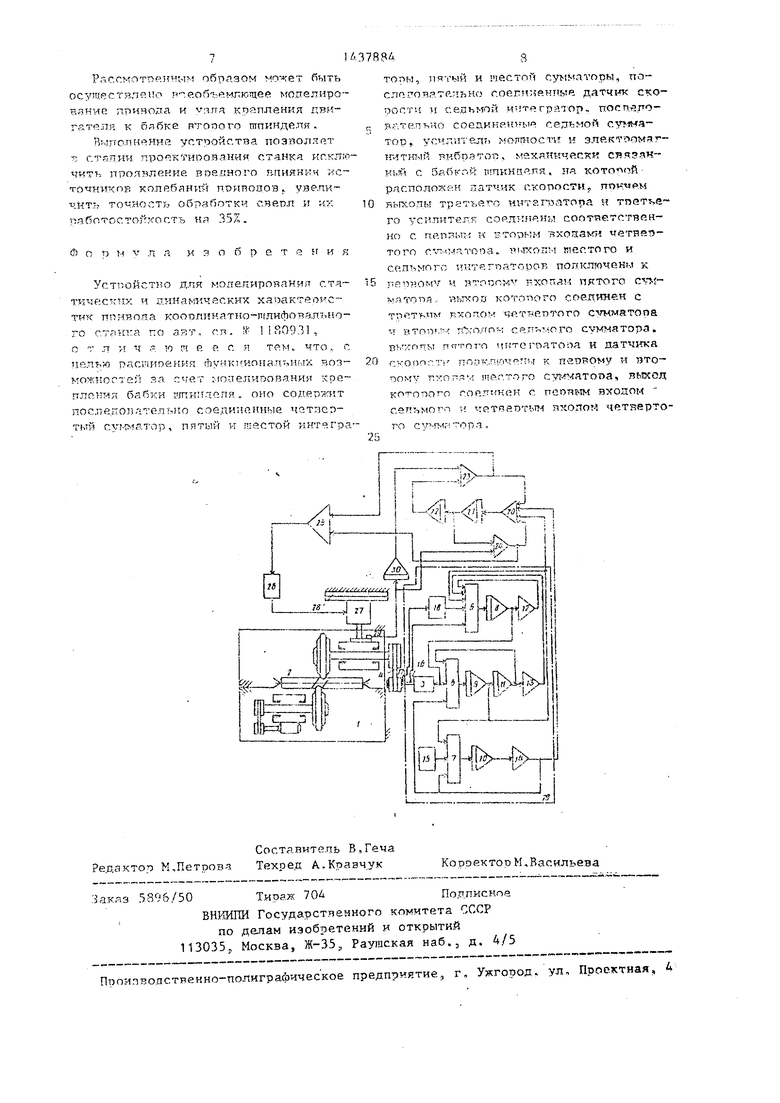
Ус.Т ойст}5о для молелироканИ)Т ста- тичеслТлХ н динамических хаоактеоис- тик ппивопа коорлин.атно 11{лифовалъио- го станка по аит, сп. № 1Р,0931, о т л ч - W и е и с я. тем. что, с гелъю распипеккя шуикиипнальны л возможностей ,а счет моаелипо8з.ни;т гтло.;мл бабки ршкплепя. оно содержит последовательно соединенные четвертый суг-иатор, плтый к гаестой иитеграторм, пятый н пестом сум атпры, после го ват ель но соег:иир-ннь в датщ-гк скорости и ce. иитегрйчор, поспйго-
р;: тел-ьно соепике. седьмой тор, усил1Г1-ел7 мотюсти н злектоомаг- вибратор, мйхял кчески сяяэак- кьй с бйбкой п пкнце.пя, на кото- ой рлсполо.кн датчик скорости. ГГОИ-«Р.М
выходы третьего инт.п.5атора н тпетье™ го усипите.пк соединены соответстяйн- но с перзьп-; к торым входам 4 3THRt - того с ч-дмятопа. выхолм шестого и селъмогс интеграторов погпслючены к
TippHOMV и BToooMV F.xou,4i пктого v.;)TOP.A.. вьтхоа КОТОРОГО сое.пинен с третьем вхолон tjcTpepToro cvMMaTOoa -I лтор. --: гС-го. ce..-iO.ro суммяторз. вь-лопы п 7 рот о мь то гоятопя н дат г-гка
скот)о;. попк.п.ю - тгы к первому и второму РХОГЯМ тйстого су7.матова, вькод КОТОРОГО соелчнен с псояки входом септ-.мог 1 И чет 1еРТ1Л-1 пхояом четвертого сх -л- йторл..
1 I 1.4
| Автомобильная фара | 1924 |
|
SU931A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
