Техническое решение относится к способам и средствам исследования водной среды путем определения ее параметров и может быть использовано при автоматическом экологическом мониторинге качества воды (в том числе ее загрязненности) акваторий, преимущественно глубоководных и значительных по размерам участков акваторий.
Технология мониторинга акваторий, как правило, включает размещение в исследуемом районе (в том числе - на дне акваторий) носителей устройств регистрации параметров водной среды (РПВ), измерение параметров водной среды устройствами РПВ и передачу (трансляцию) данных измерений по каналам связи с устройств РПВ на контрольный пункт для обработки и анализа всей совокупности данных измерений [1-7]. В ряде случаев передача данных измерений осуществляется на локальный (промежуточный) контрольный пункт (ЛКП) с дальнейшей трансляцией данных на центральный контрольный пункт (например [1-5]). В качестве ЛКП используются плавающие (всплывающие) буи-ретрансляторы, связанные с наземными ЦКП линиями кабельной [5], радио- или спутниковой [1-3] связи, а также автономные необитаемые подводные аппараты (АНПА) [1, 7, 8].
При этом известные способы и устройства мониторинга водной среды предназначены, как правило, для измерения различных типов параметров и характеристик: гидрологических, гидрохимических, а также биологических, геофизических и технических [9, 10]. Однако стремление к расширению числа измеряемых параметров и соответственно - к увеличению числа датчиков в ряде случаев (например, в известных способах и устройствах [4-6]) неоправданно и приводит к нежелательному (чрезмерному) усложнению устройств мониторинга и снижению их надежности.
Представляется, что при выборе датчиков и их числа целесообразно учитывать необходимые и достаточные условия для достижения конкретно поставленных задач исследований водной среды. Так, опыт [3] показывает, что для корректного решения задач экологического мониторинга и оценки загрязненности акваторий приоритетное значение (необходимое и достаточное) представляет химический и радиационный анализ воды, и расширение числа измеряемых параметров не может считаться целесообразным как с технической, так и с экономической точек зрения.
Кроме того, следует учитывать, что мониторинг акваторий (морей, рек, озер, водохранилищ и т.д.) традиционно классифицируется [9, 10] по категориям (группам), основными из которых являются: 1) геофизический мониторинг (акустический мониторинг акватории и ее дна посредством наблюдения и измерения сейсмических и электромагнитных сигналов) и 2) экологический мониторинг качества воды (в том числе ее загрязненности) посредством измерения ее физико-химических параметров.
Указанные две группы мониторинга акваторий в общем случае, как правило, включают размещенные на носителях средства измерений, блоки памяти, блоки обработки данных, средства связи с контрольными пунктами сбора данных, но отличаются специфическими признаками, обусловленными особенностями технологии данной группы наблюдений водной среды. Эти различия и особенности можно проследить по двум группам известных, запатентованных в последнее время технических решений:
1) Первая группа (геофизический мониторинг): [1, 2]; US 2005/0077902 А1, 14.04.2005; RU 2323456 С2, 27.04.2008; RU 2270464 C1, 20.02.2006; RU 2294400 C1, 20.02.2007; RU 2436132 C1, 10.12.2011;
2) Вторая группа (экологический мониторинг качества водной среды): [3-6]; US 6916219 В2, 12.07.2005; JP 2010285072 А, 24.12.2010; KR 20120069300 А, 28.06.2012; KR 20110100970 А, 15.09.2011.
Ряд известных технических решений в той или иной степени ограничены в применении и функциональных возможностях: объекты геофизического мониторинга [1, 2 и др.] первой группы непригодны для экологического контроля качества воды 2-й группы мониторинга; применение АНПА в качестве основного и единственного носителя устройства РПВ [7] следует считать недостаточным; известные технологии экологического мониторинга, например [3-6], ограничены применением автономных донных станций (АДС) в качестве носителей устройств РПВ, а использование АНПА в составе аппаратуры (ЛКП и носителей устройств РПВ) не предусмотрено. Причем ряд известных способов и устройств (например [4-6]) при видимой (декларируемой) универсальности с разнообразным назначением и множеством измеряемых параметров акватории непомерно сложны, подчас умозрительны и почти недоступны для практического промышленного применения.
Анализ уровня техники показывает, что для адекватного и эффективного экологического мониторинга качества воды целесообразно строить технологию экологического контроля и наблюдения с использованием совокупности синергетических признаков (элементов) известных технических решений различных видов (групп) мониторинга акваторий. При этом может быть достигнуто новое оптимальное расширение арсенала технических объектов данного назначения со значительными функциональными возможностями и высокой достоверностью данных измерений заданной совокупности характеристик качества водной среды.
Наиболее близким по общему составу конструктивных элементов в целом может являться техническое решение [1] (система и способ мониторинга) по патенту US 7796466 В2, 14.09.2010 (US 2008/0144442 А1, 19.07.2008), принятое за прототип.
Известный способ мониторинга акваторий включает размещение на дне исследуемой акватории носителей устройств регистрации параметров водной среды (РПВ), измерение параметров водной среды устройствами РПВ, передачу данных измерений по каналам связи с устройств РПВ на локальный контрольный пункт (ЛКП) и дальнейшую трансляцию по линиям радиосвязи данных измерений с ЛКП на центральный контрольный пункт (ЦКП) для обработки и анализа всей совокупности данных измерений. В качестве носителей устройств РПВ используют автономные донные станции (АДС), в качестве ЛКП используют, по меньшей мере, один мобильный автономный необитаемый подводный аппарат (АНПА). АДС и мобильный АНПА оснащают приемопередатчиками и радиомодемами для беспроводного радиообмена командами и данными между АДС и мобильным АНПА. АДС снабжают гидроакустическими информационными каналами связи соседних АДС друг с другом, а также оснащают гидроакустическими маяками-ответчиками для формирования гидроакустической системы навигации мобильного АНПА.
Известная мобильная система [1] комплексного мониторинга акваторий содержит размещенные на дне исследуемой акватории носители устройств измерения и регистрации параметров водной среды (РПВ) и связанный с ними средствами связи локальный контрольный пункт (ЛКП), а также центральный контрольный пункт (ЦКП), связанный с ЛКП линиями радиосвязи, в качестве носителей устройств РПВ использованы автономные донные станции (АДС), в качестве ЛКП использован, по меньшей мере, один мобильный автономный необитаемый подводный аппарат (АНПА). АДС и мобильный АНПА оснащены приемопередатчиками и радиомодемами для беспроводного радиообмена командами и данными между АДС и мобильным АНПА, причем АДС снабжены гидроакустическими информационными каналами связи соседних АДС друг с другом, а также оснащены гидроакустическими маяками-ответчиками для формирования гидроакустической системы навигации мобильного АНПА.
Однако возможности способа и системы [1] ограничены геофизическим мониторингом: сейсмическими и электромагнитными измерениями 1-й группы мониторинга для получения данных о морском дне, а в качестве устройств РПВ использованы сенсоры сейсмических и/или электромагнитных сигналов (гидрофоны, геофоны, датчики электромагнитного поля). Способ и система [1] предназначены специально для исследования дна моря и не затрагивают экологического мониторинга по контролю качества водной среды и загрязненности акватории (2-й группы мониторинга), поэтому технология [1] представляется недостаточно информативной для адекватных экологических исследований водной среды. Основное внимание в [1] уделено конструктивному выполнению и размещению блоков сейсмических и электромагнитных сенсоров различной формы и конфигурации (представлены 5 вариантов), однако специфика блоков питания в [1] не рассматривается, поскольку для подзарядки эти блоки должны подниматься на борт судна обеспечения на поверхность акватории.
Недостатком технологии [1] следует также считать ограниченный технический ресурс и необходимость всплытия носителей устройств сейсмических и электромагнитных сенсоров для подзарядки питания, что может быть устранено введением специальных устройств автономной подзарядки, предложенных в заявленном техническом решении. Кроме того, технология [1] требует наличия буксируемого судном обеспечения сейсмоисточника и поверхностного буя связи, а экологический мониторинг качества водной среды (включая глубоководные и значительные по размерам акватории) посредством технологии [1] невозможен.
Сущность предлагаемого технического решения заключается в создании способа и системы мобильного мониторинга акваторий, позволяющих проводить надежный и достоверный комплексный экологический мониторинг качества и загрязненности водной среды на значительных по размерам контролируемых участках акваторий большой глубины, обеспечивая необходимые и достаточные условия измерений, их дублирование и стыковку. Предлагаемое техническое решение, обеспечивающее непрерывность комплексных измерений и их регулярную трансляцию на ЦКП с заданной дискретностью, является конструктивной альтернативой известных технологий [2, 4-7] «реального времени», зачастую только декларируемых, а не корректно валидных для достижения технического результата.
Основной технический результат предлагаемого технического решения - расширение арсенала и функциональных возможностей средств экологического мониторинга акваторий (2-я группа) при повышении информативности, надежности и достоверности данных измерений качества водной среды посредством введения в состав системы экологического комплексного мониторинга мобильного подводного аппарата АНПА, гидроакустическая навигация которого осуществляется по маякам-ответчикам автономных донных станций (АДС), являющихся носителями устройств РПВ. Предложенная система обеспечивает дублирование процесса получения данных измерений и исключает необходимость всплытия носителей РПВ и/или АНПА для подзарядки элементов питания, не требует установки поверхностного буя-ретранслятора и независима от погодных условий. За счет использования мобильного АНПА обеспечивается стыковка измерений АДС, а взаимодействие и возможная взаимная подзарядка электропитания АДС и мобильного АНПА увеличивает технический ресурс всего комплекса мониторинга. Мобильный АНПА позволяет расширить площадь исследуемого района, покрытого сетью АДС. При этом может быть достигнуто близкое к оптимальному значение комплексного критерия «сложность-стоимость-эффективность (технический результат)», т.е. достижение технического результата при снижении сложности и приемлемой стоимости производства и технических средств комплексного экологического мониторинга акваторий.
Технический результат при выполнении способа экологического мониторинга акваторий достигается следующим образом.
Способ мониторинга акваторий включает размещение на дне исследуемой акватории носителей устройств регистрации параметров водной среды (РПВ), измерение параметров водной среды устройствами РПВ, передачу данных измерений по каналам связи с устройств РПВ на локальный контрольный пункт (ЛКП) и дальнейшую трансляцию по линиям радиосвязи данных измерений с ЛКП на центральный контрольный пункт (ЦКП) для обработки и анализа всей совокупности данных измерений, в качестве носителей устройств РПВ используют автономные донные станции (АДС), в качестве ЛКП используют, по меньшей мере, один мобильный автономный необитаемый подводный аппарат (АНПА), АДС и мобильный АНПА оснащают приемопередатчиками и радиомодемами для беспроводного радиообмена командами и данными между АДС и мобильным АНПА, причем АДС снабжают гидроакустическими информационными каналами связи соседних АДС друг с другом, а также оснащают гидроакустическими маяками-ответчиками для формирования гидроакустической системы навигации мобильного АНПА.
Отличительной особенностью способа является то, что устройства РПВ выполняют многоканальными для измерения совокупности экологических параметров качества водной среды (в том числе ее загрязнения) датчиками, по крайней мере, из группы: датчики электропроводности и температуры, электрохимический детектор химического анализа из ионоселективных датчиков, детекторы спектрального и радиационного анализа. Параметры водной среды дополнительно измеряют устройствами РПВ, которые устанавливают на мобильном АНПА, при этом в подводном положении мобильный АНПА используют в качестве подвижного ЛКП, а при всплытии мобильного АНПА на поверхность - в качестве носителя средства радиосвязи (спутниковой связи) для трансляции данных измерений и информации о работе устройстве РПВ АДС на ЦКП. Способ также отличается тем, что мобильный АНПА и АДС снабжают устройствами и радиомодемами стыковки АНПА с АДС для подзарядки аккумуляторов мобильного АНПА от блоков питания АДС.
Технический результат при использовании мобильной системы комплексного мониторинга достигается следующим образом.
Мобильная система комплексного мониторинга акваторий содержит размещенные на дне исследуемой акватории носители устройств измерения и регистрации параметров водной среды (РПВ) и связанный с ними средствами связи локальный контрольный пункт (ЛКП), а также центральный контрольный пункт (ЦКП), связанный с ЛКП линиями радиосвязи, в качестве носителей устройств РПВ использованы автономные донные станции (АДС), в качестве ЛКП использован, по меньшей мере, один мобильный автономный необитаемый подводный аппарат (АНПА), АДС и мобильный АНПА оснащены приемопередатчиками и радиомодемами для беспроводного радиообмена командами и данными между АДС и мобильным АНПА, причем АДС снабжены гидроакустическими информационными каналами связи соседних АДС друг с другом, а также оснащены гидроакустическими маяками-ответчиками для формирования гидроакустической системы навигации мобильного АНПА.
Система отличается тем, что устройства РПВ выполнены многоканальными для измерения совокупности экологических параметров качества водной среды (в том числе ее загрязнения) датчиками, по крайней мере, из группы: датчики электропроводности и температуры, электрохимический детектор химического анализа из ионоселективных датчиков, детекторы спектрального и радиационного анализа.
Кроме того, система отличается тем, что на мобильном АНПА дополнительно установлены устройства РПВ для измерения параметров водной среды.
При этом мобильный АНПА, являющийся ЛКП, содержит включаемые при всплытии средства радиосвязи (спутниковой связи) для трансляции всей совокупности данных измерений и информации о работе устройств РПВ АДС и РПВ АНПА на ЦКП.
Система также отличается тем, что мобильный АНПА и АДС снабжены устройствами и радиомодемами стыковки АНПА с АДС для подзарядки аккумуляторов мобильного АНПА от блоков питания АДС, при этом устройства стыковки мобильного АНПА и АДС выполнены в виде устройств бесконтактной связи посредством сопряженных катушек индуктивности.
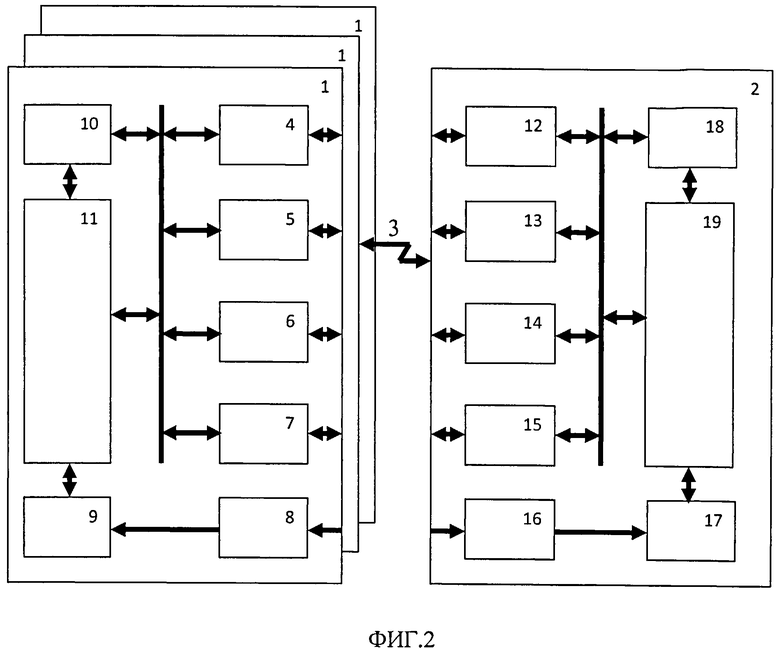
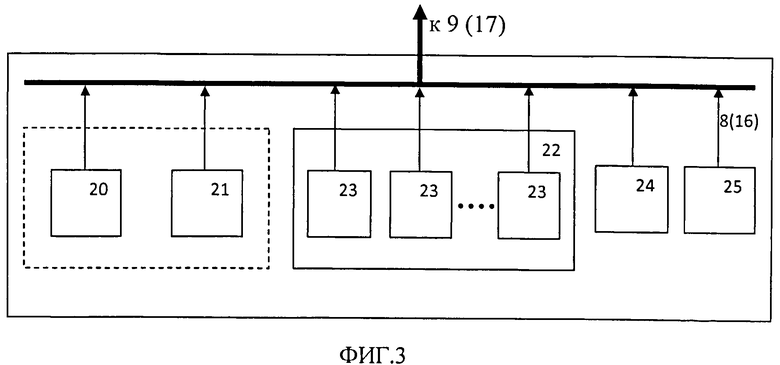
На фиг. 1 представлена общая схема выполнения мобильной системы комплексного мониторинга акваторий, на фиг. 2 приведены общие конструктивные схемы автономной донной станции АДС и мобильного АНПА, фиг. 3 иллюстрирует конструкцию устройства РПВ АДС и РПВ АНПА.
На чертежах приняты следующие обозначения:
1 - АДС - носители устройств РПВ;
2 - мобильный АНПА;
3 - линия связи АДС с АНПА;
4 - блок стыковки АДС с АНПА;
5 - блок связи АДС с АНПА (приемопередатчик и радиомодем);
6 - блок маяка-ответчика;
7 - блок гидроакустической связи АДС с соседними АДС;
8 - блок датчиков РПВ АДС (многоканальное устройство);
9 - блок измерения и хранения параметров водной среды АДС;
10 - блок питания АДС;
11 - контроллер АДС;
12 - блок стыковки АНПА с АДС;
13 - блок связи АНПА с АДС (приемопередатчик и радиомодем);
14 - модуль гидроакустической навигации АНПА по маякам-ответчикам;
15 - устройство радиосвязи (спутниковой связи) АНПА с ЦКП;
16 - блок датчиков РПВ АНПА (многоканальное устройство);
17 - блок измерения и хранения параметров водной среды АНПА;
18 - блок питания АНПА;
19 - контроллер АНПА;
20 - датчик электропроводности;
21 - датчик температуры;
22 - электрохимический детектор из ионоселективных датчиков;
23 - ионоселективные датчики;
24 - детектор спектрального анализа;
25 - детектор радиационного анализа.
Работа мобильной системы комплексного мониторинга при осуществлении способа мониторинга акваторий заключается в следующем.
Последовательно перемещаясь от одной АДС 1 к другой АДС, которые размещены на дне исследуемой акватории и являются носителями устройств 8 РПВ, мобильный (самоходный, управляемый автоматически по заданной программе [8]) АНПА 2, который является ЛПК, поочередно собирает данные измерений устройств 8 РПВ АДС о параметрах водной среды (фиг. 1). В качестве АДС могут быть использованы известные устройства (например, по патентам RU 136414 U1, 10.01.2014, RU 13094 U1, 10.08.2013 или их модификации), а АНПА может быть реализован на принципах, изложенных в [8], RU 108747 U1, 27.09.2011. При этом АНПА 2 определяет свое местоположение посредством модуля 14 гидроакустической навигации по маякам-ответчикам 6 АДС, формирующих гидроакустическую систему навигации с длинной базовой линией (см. [8]). Измеряемые датчиками устройства 8 РПВ значения параметров водной среды преобразуются в блоке 9 приема и хранения информации и поступают в блок 5 связи АДС с АНПА.
Передача данных измерений с АДС 1 на АНПА 2 осуществляется по линии связи 3 посредством блока 5 связи, выполненного в виде приемопередатчика и радиомодема для беспроводного радиообмена командами и данными между АДС и АНПА. Принцип построения беспроводной (бесконтактной) связи (до расстояний 5 м) известны и описаны в [2, 11]. Для стыковки АДС с АНПА при подзарядке блока 18 питания мобильного АНПА 2 от блока 10 питания АДС 1 (литиевый источник питания в якорном блоке АДС) используется блок 4, при этом устройство 4 также выполнено в виде устройства бесконтактной связи посредством сопряженных катушек индуктивности. Устройства бесконтактной связи известны [2] и применяются в подводной технике (например, модуль "Seatooth S100" фирмы WFS [11]).
Блок 7 служит для гидроакустической связи соседних АДС друг с другом для передачи измеренных блоком 8 данных. Последовательная передача данных с одной АДС на соседнюю АДС и накопление данных всей сети АДС на одной (контрольной) АДС с последующей передачей на ЦКП всей совокупности данных при всплытии контрольной АДС (показано вертикальной стрелкой на фиг. 1) является дополнительным вариантом использования системы комплексного мониторинга, обеспечивающим дублирование и надежность системы и исключающим необходимость всплытия других АДС, кроме контрольной.
Блок 8 АДС 1 и блок 16 АНПА 2 являются многоканальными устройствами для измерения совокупности параметров водной среды и содержат (фиг. 3) датчик 20 электропроводности, датчик 21 температуры (или известный модуль CTD [3], включающий совокупность датчиков электропроводности, температуры и глубины) электрохимический детектор 22 из ионоселективных датчиков 23, детекторы 24 и 25 спектрального и радиационного анализа. Описание структуры и работы датчиков можно найти в [3]. При необходимости число датчиков и измеряемых параметров водной среды может быть увеличено.
Контроллер 11 управляет работой блоков 4-10, входящих в АДС, и выполнен в виде цифрового программируемого процессора.
Структура и работа блоков 12, 13, 16-18 мобильного АНПА 2 (фиг. 2) в части измерения параметров водной среды и взаимодействия с АДС аналогичны структуре и работе соответственно блоков 4, 5, 8-10 АДС 1. Модуль 14 обеспечивает гидроакустическую навигацию АНПА по маякам-ответчикам 6 АДС.
При всплытии АНПА 2 на поверхность акватории включается блок 15 радиосвязи (спутниковой связи) для трансляции всей совокупности данных измерений и информации о работе устройств РПВ АДС и РПВ АНПА на ЦКП. Работой блоков 12-18, входящих в АНПА, управляет контроллер 19.
ЦКП, который может быть выполнен в виде наземного контрольного пункта или размещен на судне, находящемся в исследуемой акватории, обрабатывает всю совокупность данных измерений, полученных РПВ АДС и РПВ мобильного АНПА, а также информацию об их работе.
Для мониторинга значительных акваторий одновременно со стационарными АДС-носителями устройств РПВ могут использоваться два (или более) мобильных АНПА.
Таким образом, предложенные система и способ позволяют эффективно использовать их в процессе мобильного комплексного мониторинга глубоководных (до 6000 м) и значительных по размерам (до 100 кв. км и более) акваторий для контроля загрязнения, зон буровых платформ, подводных трубопроводов, разлива нефти, аварийных районов танкеров и других чрезвычайных ситуаций.
Из описания способа и системы мониторинга следует, что достигается их назначение с указанным техническим результатом, который находится в причинно-следственной связи с совокупностью существенных признаков. При этом достигается близкое к оптимальному значение комплексного критерия «сложность - стоимость - эффективность (технический результат)».
ИСТОЧНИКИ ПО УРОВНЮ ТЕХНИКИ
I. Прототип и аналог:
1. US 7796466 В2, 14.09.2010 (US 2008/0144442 А1, 19.07.2008) - прототип.
2. US 4805160, 14.02.1989 - аналог.
II. Дополнительные источники по уровню техники:
3. RU 142150 U1, 20.06.2014.
4. RU 2443001 С1, 20.02.2012.
5. RU 2331876 С2, 20.08.2008.
6. RU 2282217 С1, 20.08.2006.
7. RU 2269801 С2, 10.02.2006.
8. Милн П.Х. Гидроакустические системы позиционирования: Пер. с англ. - Л.: Судостроение, 1989. - 232 с.
9. Геоэкологический мониторинг морских нефтегазоносных акваторий / Л.И. Лобковский, Д.Г. Левченко, А.В. Леонов и др. - М.: Наука, 2005. - 346 с.
10. www.ecocommunity.ru/refer.php?id=291.
11. www.wfs-tec.com.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА В ОТКРЫТОЙ АКВАТОРИИ | 2017 |
|
RU2650798C1 |
| ТЕХНОЛОГИЯ УТОЧНЕННОГО ПОЗИЦИОНИРОВАНИЯ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ МОБИЛЬНОГО ПОЛИГОНА | 2012 |
|
RU2507532C2 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ СТАНЦИЯ ДЛЯ ГЕОЛОГИЧЕСКОГО МОНИТОРИНГА АКВАТОРИЙ | 2014 |
|
RU2566599C1 |
| СИСТЕМА ПРИВЕДЕНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА К ДОННОМУ ПРИЧАЛЬНОМУ УСТРОЙСТВУ | 2020 |
|
RU2750550C1 |
| Универсальный буй для экологического мониторинга водоемов | 2022 |
|
RU2796989C1 |
| Способ позиционирования самоходного необитаемого подводного аппарата, выполняющего мониторинг подводной акватории | 2022 |
|
RU2794555C1 |
| УТОЧНЕННОЕ ПОЗИЦИОНИРОВАНИЕ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ, ОБРАЗОВАННОМ ПРОИЗВОЛЬНО РАССТАВЛЕННЫМИ ГИДРОАКУСТИЧЕСКИМИ МАЯКАМИ-ОТВЕТЧИКАМИ | 2011 |
|
RU2488842C1 |
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
| СЕТЬ ДЛЯ МОНИТОРИНГА АКВАТОРИИ | 2012 |
|
RU2499282C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
Использование: техническое решение относится к способам и средствам исследования водной среды путем определения ее параметров и может быть использовано при автоматическом мониторинге акваторий. Сущность: в качестве носителей устройств измерения и регистрации параметров водной среды РПВ использованы автономные донные станции (АДС), в качестве локального контрольного пункта (ЛКП) использован мобильный автономный необитаемый подводный аппарат (АНПА), АДС и мобильный АНПА оснащены приемопередатчиками и радиомодемами для беспроводного радиообмена командами и данными между АДС и мобильным АНПА, а АДС снабжены гидроакустическими маяками-ответчиками, которые формируют гидроакустическую систему навигации мобильного АНПА. Мобильный АНПА и АДС снабжены устройствами и радиомодемами стыковки АНПА и АДС для подзарядки аккумуляторов АНПА от блоков питания АДС, которые выполнены в виде устройств бесконтактной связи посредством сопряженных катушек индуктивности. Технический результат: расширение функциональных возможностей мониторинга акваторий при повышении информативности, надежности и достоверности данных измерений, увеличение технического ресурса. 2 н.п. ф-лы, 3 ил. 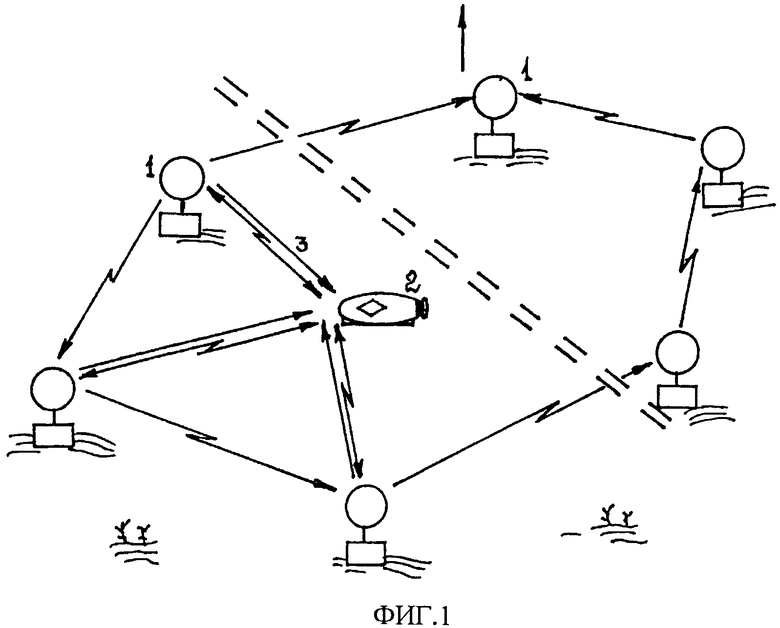
1. Способ мониторинга акваторий, включающий размещение на дне исследуемой акватории носителей устройств регистрации параметров водной среды (РПВ), измерение параметров водной среды устройствами РПВ, передачу данных измерений по каналам связи с устройств РПВ на локальный контрольный пункт (ЛКП) и дальнейшую трансляцию по линиям радиосвязи данных измерений с ЛКП на центральный контрольный пункт (ЦКП) для обработки и анализа всей совокупности данных измерений, в качестве носителей устройств РПВ используют автономные донные станции (АДС), в качестве ЛКП используют, по меньшей мере, один мобильный автономный необитаемый подводный аппарат (АНПА), АДС и мобильный АНПА оснащают приемопередатчиками и радиомодемами для беспроводного радиообмена командами и данными между АДС и мобильным АНПА, причем АДС снабжают гидроакустическими информационными каналами связи соседних АДС друг с другом, а также оснащают гидроакустическими маяками-ответчиками для формирования гидроакустической системы навигации мобильного АНПА, отличающийся тем, что устройства РПВ выполняют многоканальными для измерения совокупности экологических параметров качества водной среды (в том числе ее загрязнения) датчиками, по крайней мере, из группы: датчики электропроводности и температуры, электрохимический детектор химического анализа из ионоселективных датчиков, детекторы спектрального и радиационного анализа, параметры водной среды дополнительно измеряют устройствами РПВ, которые устанавливают на мобильном АНПА, при этом в подводном положении мобильный АНПА используют в качестве подвижного ЛКП, а при всплытии мобильного АНПА на поверхность - в качестве носителя средства радиосвязи (спутниковой связи) для трансляции данных измерений и информации о работе устройстве РПВ АДС на ЦКП, причем мобильный АНПА и АДС снабжают устройствами и радиомодемами стыковки АНПА с АДС для подзарядки аккумуляторов мобильного АНПА от блоков питания АДС.
2. Мобильная система комплексного мониторинга акваторий, содержащая размещенные на дне исследуемой акватории носители устройств измерения и регистрации параметров водной среды (РПВ) и связанный с ними средствами связи локальный контрольный пункт (ЛКП), а также центральный контрольный пункт (ЦКП), связанный с ЛКП линиями радиосвязи, в качестве носителей устройств РПВ использованы автономные донные станции (АДС), в качестве ЛКП использован, по меньшей мере, один мобильный автономный необитаемый подводный аппарат (АНПА), АДС и мобильный АНПА оснащены приемопередатчиками и радиомодемами для беспроводного радиообмена командами и данными между АДС и мобильным АНПА, причем АДС снабжены гидроакустическими информационными каналами связи соседних АДС друг с другом, а также оснащены гидроакустическими маяками-ответчиками для формирования гидроакустической системы навигации мобильного АНПА, отличающаяся тем, что устройства РПВ выполнены многоканальными для измерения совокупности экологических параметров качества водной среды (в том числе ее загрязнения) датчиками, по крайней мере, из группы: датчики электропроводности и температуры, электрохимический детектор химического анализа из ионоселективных датчиков, детекторы спектрального и радиационного анализа, на мобильном АНПА дополнительно установлены устройства РПВ для измерения параметров водной среды, мобильный АНПА, являющийся ЛКП, содержит включаемые при всплытии средства радиосвязи (спутниковой связи) для трансляции всей совокупности данных измерений и информации о работе устройств РПВ АДС и РПВ АНПА на ЦКП, причем мобильный АНПА и АДС снабжены устройствами и радиомодемами стыковки АНПА с АДС для подзарядки аккумуляторов мобильного АНПА от блоков питания АДС, при этом устройства стыковки мобильного АНПА и АДС выполнены в виде устройств бесконтактной связи посредством сопряженных катушек индуктивности.
| US 4805160 А1, 14.02.1989 | |||
| US 6916219 B2, 12.07.2005 | |||
| Устройство для определения консистенции пульпы | 1956 |
|
SU115929A1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| СПОСОБ СБОРА ИНФОРМАЦИИ ОБ ЭКОЛОГИЧЕСКОМ СОСТОЯНИИ РЕГИОНА И АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2010 |
|
RU2443001C1 |
| МИЛН П.Х | |||
| Гидроакустические системы позиционирования: Пер | |||
| с англ | |||
| - Л.: Судостроение, 1989 | |||
| Крутильно-намоточный аппарат | 1922 |
|
SU232A1 |

