Область техники, к которой относится изобретение
Настоящее изобретение относится к способу одновременной работы приводов для перемещения подвижных аэродинамических поверхностей воздушного судна, таких как закрылки. Изобретение также относится к устройству привода подвижных аэродинамических поверхностей воздушного судна и к воздушному судну, снабженному таким устройством.
Уровень техники
Большинство воздушных судов снабжено закрылками для увеличения подъемной силы воздушного судна во время полета с относительно низкой скоростью как во время приземления, так и во время взлета. В зависимости от полетных условий, закрылки должны быть способны занимать различные положения: обычно втянутое положение и положения, в которых они выступают на 25%, 50%, 75% и 100%, соответственно.
Каждое крыло воздушного судна, таким образом, обеспечивается по меньшей мере одним закрылком. Закрылки должны перемещаться одновременно и без кручения их в различных положениях, без появления какого-либо смещения между положениями двух закрылков, способствующего дисбалансу воздушного судна, который, если он имеет большую величину, может привести к крушению воздушного судна.
Перемещение закрылков, таким образом, в целом, обеспечивается одним двигателем, установленным в фюзеляже воздушного судна, который вращает валы, проходящие в крыльях до закрылков. Валы соединяются с закрылками таким образом, что вращение валов в одном или другом направлении заставляет закрылки выдвигаться или втягиваться.
Такие устройства являются тяжелыми, громоздкими и их монтаж в воздушном судне создает значительные трудности.
Раскрытие изобретения
Задача изобретения состоит в обеспечении средства, способного устранить недостатки устройств предшествующего уровня техники, по меньшей мере, частично, в то же время, обеспечивая надежное перемещение подвижных аэродинамических поверхностей.
Изобретение является результатом другого подхода, направленного на то, чтобы связать по меньшей мере один привод с каждой подвижной аэродинамической поверхностью таким образом, чтобы привод одного закрылка в паре подвижных аэродинамических поверхностей был механически независим от привода другого закрылка в упомянутой паре закрылков. Однако при этом становится необходимым обеспечить специальное средство, гарантирующее, что перемещения подвижных аэродинамических поверхностей будут синхронизированы.
С этой целью, изобретение обеспечивает способ одновременной работы приводов для перемещения по меньшей мере двух подвижных аэродинамических поверхностей воздушного судна, причем упомянутый способ содержит этапы, на которых:
- управляют приводами, чтобы перемещать подвижные аэродинамические поверхности в направлении заданного положения;
- обнаруживают во время перемещения самый медленный привод;
- и адаптируют управление приводами, чтобы подогнать его под действие самого медленного привода.
Таким образом, каждая подвижная аэродинамическая поверхность связывается по меньшей мере с одним приводом, позволяя перемещать подвижную аэродинамическую поверхность в различные положения. При таких обстоятельствах приводы распределяются вдоль крыла воздушного судна, облегчая, таким образом, их установку. Способ, соответствующий изобретению, позволяет гарантировать, что перемещения подвижных аэродинамических поверхностей синхронизируются, чтобы избежать любого смещения, происходящего между ними, управляя приводами так, чтобы все они следили за самым медленным приводом, то есть приводами управляют так, чтобы все они работали со скоростью самого медленного привода.
Изобретение также обеспечивает устройство привода для приведения в движение подвижных аэродинамических поверхностей воздушного судна, причем упомянутое устройство содержит блок управления, связанный с приводами для перемещения подвижных аэродинамических поверхностей и программируемый для осуществления способа согласно изобретению.
Наконец, изобретение обеспечивает воздушное судно, содержащее фюзеляж с соответствующим крылом с каждой из его сторон, причем каждое крыло снабжено по меньшей мере одной подвижной аэродинамической поверхностью, причем подвижные аэродинамические поверхности соединяются с устройством привода, описанного выше типа.
Краткое описание чертежей
Другие характеристики и преимущества изобретения станут понятны при чтении последующего подробного описания, не ограничивающего осуществление изобретения.
Ссылки делаются на сопроводительные чертежи.
На фиг.1 показано схематичное изображение фрагмента воздушного судна, соответствующего изобретению; и
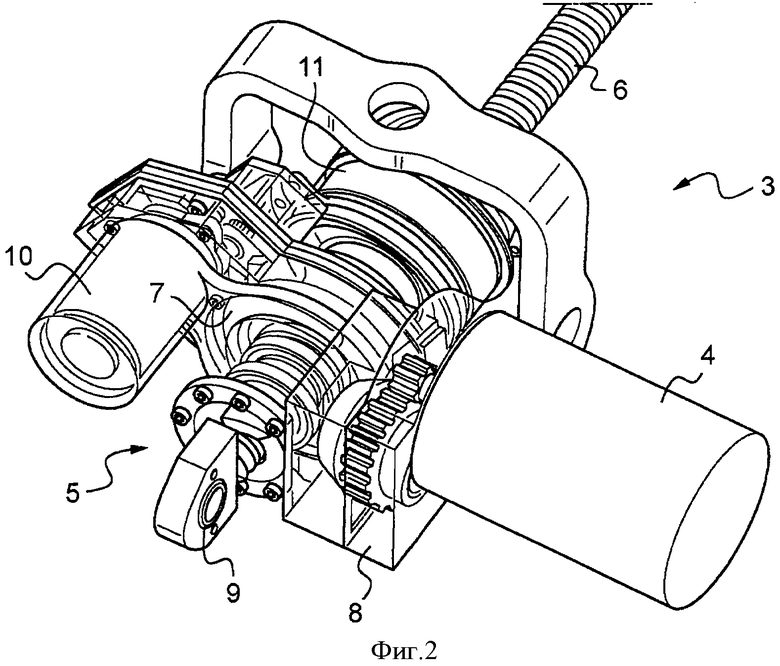
на фиг.2 - схематичный вид привода в перспективе.
Осуществление изобретения
Далее изобретение описано более подробно в его применении к перемещению закрылков воздушного судна между их различными положениями, причем таких положений имеется обычно пять, а именно: втянутое и выдвинутое на 25%, 50%, 75% или 100%.
Как показано на фигурах, воздушное судно содержит фюзеляж 100 с соответствующими крыльями 101, выступающими с каждой его стороны, причем каждое крыло в этом примере снабжено двумя закрылками 102 (ссылочная позиция 102 связывается с идентификатором .1 или .2, чтобы различать два закрылка; то же самое относится к ссылочным позициям для всех элементов, связанных конкретно с одним или другим из этих закрылков). Закрылки 102.1 и 102.2 соединяются с соответствующим устройством привода, в целом обозначаемым как 1.1 или 1.2, установленным для перемещения закрылков 102.1 или 102.2 в каждое из их положений.
Перемещениями закрылков 102.1, 102.2 управляет пилот воздушного судна через средство управления, которое осуществляет связь с центральным блоком 103 управления и которое само по себе известно. Блок 103 управления управляет работой различных частей полетного и навигационного оборудования воздушного судна. Блок 103 управления соединяется с устройствами 1.1, 1.2 приводов, чтобы передать им команды на перемещение закрылков 102.1, 102.2. Важно заметить, что закрылки управляются попарно, то есть оба закрылка 102.1 должны перемещаться одновременно друг с другом, и оба закрылка 102.2 аналогично должны перемещаться одновременно друг с другом.
Так как устройства 1.1 и 1.2 приводов идентичны друг другу, ниже описывается только один из них, и ссылочные позиции соответствующих элементов упоминаются без их идентификаторов ″.1″, или ″.2″, кроме исключительных обстоятельств.
У каждого устройства 1 привода есть блок 2 управления, соединенный с блоком 103 управления и предназначенный для управления закрылками 102, с которыми связано устройство 1 привода.
Блок 2 управления соединяется с приводами, обозначенными общей ссылочной позицией 3, которые связываются с соответствующими закрылками 102. В описанном варианте осуществления с каждым закрылком 102 связываются два привода 3.
Каждый привод 3 содержит синхронный двигатель 4 переменного тока (АС) ″бесщеточного″ типа, имеющий выходной вал, приводящий в движение винтовой домкрат 5 шарового или роликового винтового типа. Винтовой домкрат 5 имеет червяк 6 с установленной на нем гайкой 7, поступательное движение которого ограничивается за счет неподвижной конструкции, и который приводится во вращение выходным валом двигателя 4 через понижающую коробку 8 передач. Один конец 9 винта 6 соединяется с закрылком 102 таким образом, чтобы препятствовать вращению, и приводит в движение закрылок в осевом направлении.
Винт 6 снабжен ограничителями конца хода (не показаны), ограничивающими максимальный ход, на который может перемещаться винт 6.
Каждый привод 3 содержит, по меньшей мере, датчик нагрузки, датчик 10 положения для считывания положения винта 6 (например, типа измерительного дифференциального преобразователя вращательных перемещений (RVDT)) и датчик положения для считывания положения двигателя, причем датчик устанавливается в двигателе 4 (например, датчик координат, кодирующий диск или оптический кодер, или другой тип).
Каждый привод 3 имеет надежный тормоз (ссылочная позиция 11), выполненный с возможностью предотвращения поступательного движения винта 6 при отсутствии электроэнергии. Тормоз 11 работает на трении и имеет традиционную конструкцию. Тормоз 11 имеет первую пластину с ограничением вращения за счет гайки 7 и вторую пластину с ограничением вращения за счет конструкции, способную двигаться поступательно относительно первой пластины между положением контакта (сухое трение) относительно первой пластины и положением, когда она отделена от первой пластины промежутком. Вторая пластина приводится в положение контакта посредством пружин, а в отделенное положение приводится катушкой, которая действует, когда запитывается электроэнергией, чтобы притягивать вторую пластину магнитным способом. Тормоз 11 имеет такие размеры, чтобы блокировать привод в положении, когда двигатель 4 не запитывается электроэнергией, или по команде от блока управления, чтобы противодействовать двигателю 4 и останавливать его в случае, когда двигатель 4 идет в разнос и более не реагирует на блок 2 управления.
Можно понять, что блок 2.1 управления управляет одновременным перемещением закрылков 102.1, а блок 2.2 управления управляет одновременным перемещением закрылков 102.2.
Порядок работы устройства 1 привода описывается ниже, причем порядок работы одинаков как для устройства 1.1 привода закрылков 102.1, так и для устройства 1.2 привода закрылков 102.2.
После начала операции блок 2 управления выполняет режим запуска, содержащий, в частности, процедуру определения положений приводов 3 и процедуру обнаружения любого отказа посредством самоконтроля.
Когда режим запуска подтвержден, блок 2 управления 2 находится в нормальном режиме работы и ожидает команд от блока 103 управления.
Когда блок 2 управления принимает команду от блока 103 управления, чтобы выпустить закрылки 102 на определенную величину, блок 2 управления определяет положение, которое должно быть достигнуто, и ток, который должен быть подан на двигатели 4. После того как тормоз 11 разблокирован, на электродвигатели 4 подается электропитание, чтобы позволить двигателям 4 выполнить этап разгона, этап постоянной скорости и затем этап снижения скорости двигателей 4 при приближении к положению, которое должно быть достигнуто, до тех пор, пока двигатели 4 не остановятся, когда упомянутое положение достигнуто. Блок 2 управления отключает подачу электропитания к двигателям 4 и одновременно к тормозу 11, таким образом, заставляя срабатывать тормоз 11, чтобы заблокировать привод 3 в достигнутом положении.
Работа блока 2 управления использует два контура сервоуправления, один - для положения и другой - для тока.
На всем протяжении трех описанных выше этапов работы блок управления определяет самый медленный двигатель 4 приводов 3 закрылков 102 и адаптирует управление двигателями 4, чтобы установить управление двигателями 4 соответствующим самому медленному двигателю 4. Эта синхронизация приводов 3 служит для того, чтобы избежать любого смещения по времени при выпускании закрылков в паре закрылков с учетом любого смещения между двумя частями данного закрылка, которые, в противном случае, не могли бы двигаться параллельно, вызывая зажатие закрылка. Обнаружение, какой двигатель 4 является самым медленным и адаптация к нему управления двигателями, проводится периодически с частотой, обеспечивающей гарантию, что любое смещение меньше, чем максимально допустимое значение смещения.
Для примера, обнаружение, какой двигатель является самым медленным, может выполняться, сравнивая положения двигателей и/или винтов в заданный момент, чтобы идентифицировать, какой привод отстает больше других.
Управление адаптируется, вычисляя опережение каждого привода относительно самого медленного привода и определяя скорость, которая позволит всем приводам достигнуть желаемого положения в то же самое время, что и самый отстающий привод.
Если задержка относительно самого медленного привода когда-либо превышает заданный порог, то тогда все приводы устройства привода останавливаются.
На протяжении всего времени работы блока 2 управления, блок 2 управления контролирует собственную работу и действие приводов 3, чтобы как можно скорее обнаруживать отказ.
Различные причины отказа и как они могут быть обнаружены перечисляются ниже:
- заедание привода, когда винт остается неподвижным и скорость двигателя равна нулю, в то время как потребление тока увеличивается;
- отказ датчика углового положения двигателя, в то время как потребление тока нормальное и перемещение винта 6 обнаруживается;
- ошибка в работе блока 2 управления, которая обнаруживается процедурой обнаружения отказа, выполняемой блоком 2 управления.
При обнаружении отказа включается режим отказа, в котором блок 2 управления сообщает центральному блоку 103 управления воздушного судна, что он больше не работает, и управляет приводами 3, находящимися под его управлением, так чтобы они были заблокированы в определенном положении. Таким образом, в случае обнаружения отказа по меньшей мере в одном из приводов одного из закрылков на одном из крыльев, приводы этого закрылка останавливаются, а также останавливаются приводы соответствующего закрылка, расположенного на другом крыле, в то время как приводы других закрылков управляются так, чтобы двигаться. Как вариант, могли быть остановлены все приводы.
Некоторые отказы, в частности, те, которые относятся к блоку 2 управления, могут быть обнаружены процедурой обнаружения отказа, выполняемой блоком 103 управления или внешней схемой, предназначенной для контроля.
Естественно, изобретение не ограничивается описанными реализациями, а охватывает любой вариант, попадающий в рамки объема изобретения, как он определяется формулой изобретения.
В частности, изобретение может применяться к воздушному судну любого типа, отличного от аэропланов, и, в частности, беспилотных летательных аппаратов.
Количество приводов для каждого закрылка не меньше одного и зависит, например, от длины закрылка и/или усилий, которые должны быть развиты.
Количество закрылков на одном крыле не меньше одного и может быть равным трем. Устройство привода может быть выполнено с возможностью движения более чем одного закрылка на одном крыле.
Приводы могут обладать конструкцией, которая отличается от показанной, и например: они могут быть чисто линейными или чисто вращательными; они могут быть гидравлическими; они могут не иметь понижающей передачи.
Изобретение может применяться к другим подвижным аэродинамическим поверхностям, отличным от закрылков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления воздушным судном, система управления и воздушное судно | 2017 |
|
RU2688559C2 |
| СИСТЕМА ПРИВОДА ПОСАДОЧНЫХ ЗАКРЫЛКОВ | 2006 |
|
RU2399554C2 |
| ГИБРИДНОЕ ВОЗДУШНОЕ СУДНО | 1996 |
|
RU2160689C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ЗАКРЫЛКОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2728236C2 |
| УСТРОЙСТВО ГЕРМЕТИЗАЦИИ ЗАЗОРА МЕЖДУ ЗАКРЫЛКАМИ | 2007 |
|
RU2375251C2 |
| КРЫЛО ВОЗДУШНОГО СУДНА И ВОЗДУШНОЕ СУДНО, СНАБЖЕННОЕ ЭТИМ КРЫЛОМ | 2006 |
|
RU2415775C2 |
| АВАРИЙНЫЙ ИСТОЧНИК ЭНЕРГОСНАБЖЕНИЯ ДЛЯ ВОЗДУШНОГО СУДНА, СНАБЖЕННЫЙ ТУРБИНОЙ С ПРИВОДОМ ОТ НАБЕГАЮЩЕГО ПОТОКА ВОЗДУХА И ПРЕОБРАЗОВАТЕЛЕМ ЭНЕРГИИ | 2007 |
|
RU2402463C2 |
| СПАСАТЕЛЬНАЯ СИСТЕМА ВОЗДУШНОГО СУДНА | 2022 |
|
RU2781471C1 |
| ВОЗДУШНОЕ СУДНО И СПОСОБ ЭКСПЛУАТАЦИИ ВОЗДУШНОГО СУДНА | 2000 |
|
RU2250181C2 |
| СИСТЕМА ЩИТКОВ НА КРЫЛЕ САМОЛЕТА С ЖЕСТКИМ КРЫЛОМ | 2004 |
|
RU2346851C2 |
Способ одновременной работы приводов для перемещения подвижных аэродинамических поверхностей воздушного судна. Способ содержит этапы, на которых: управляют приводами, чтобы перемещать подвижные аэродинамические поверхности в направлении заданного положения; обнаруживают во время движения самый медленный привод; и адаптируют управление приводами, чтобы подогнать его под действия самого медленного привода. Устройство привода для аэродинамических поверхностей и воздушное судно, содержащее такое устройство. Группа изобретений направлена на обеспечение надежного перемещения подвижных аэродинамических поверхностей. 3 н. и 7 з.п. ф-лы, 2 ил.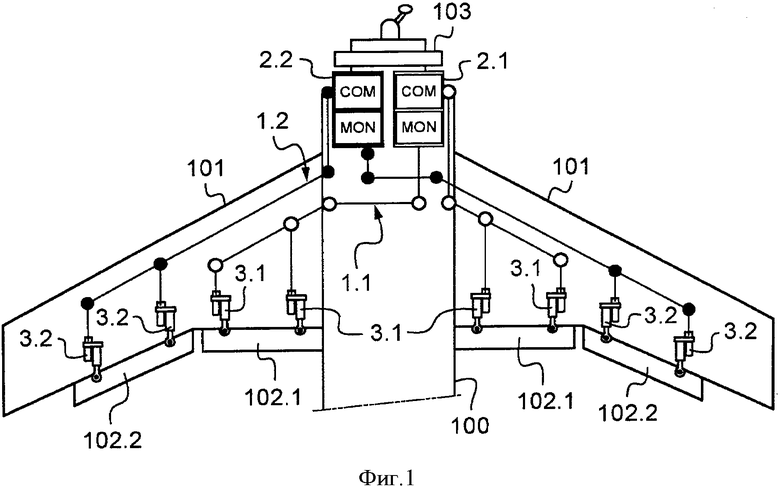
1. Способ обеспечения одновременной работы механически независимых приводов для перемещения по меньшей мере двух подвижных аэродинамических поверхностей воздушного судна, включающий в себя:
- управление приводами с помощью соединенного с ними блока управления для перемещения подвижных аэродинамических поверхностей в направлении заданного положения;
- во время перемещения подвижных аэродинамических поверхностей обнаружение самого медленного привода с помощью датчиков положения приводов, содержащихся в приводах; и
- управление приводами с помощью соединенного с ними блока управления так, чтобы все приводы работали со скоростью самого медленного привода.
2. Способ по п. 1, в котором, когда привод достигает заданного положения, этот привод останавливают и тормозят, чтобы удерживать его в заданном положении.
3. Способ по п. 1, в котором каждый привод содержит электродвигатель, при этом способ содержит этап обнаружения отказа из-за комбинации, по меньшей мере, некоторых из следующих параметров: положение аэродинамической поверхности; положение двигателя; ток источника электропитания двигателя; нагрузка привода.
4. Способ по п. 3, в котором каждый привод содержит тормоз, при этом параметры, используемые в режиме обнаружения отказа, содержат также тормозной момент.
5. Способ по п. 3, в котором, в случае обнаружения отказа по меньшей мере одного из приводов, все приводы останавливают.
6. Способ по п. 3, который предназначен для управления по меньшей мере четырьмя аэродинамическими поверхностями, распределенными по обоим крыльям воздушного судна, при этом в случае обнаружения отказа по меньшей мере одного из приводов одной из аэродинамических поверхностей на одном из крыльев, приводы этой аэродинамической поверхности останавливают, как и приводы соответствующей аэродинамической поверхности, расположенной на другом крыле.
7. Способ по п. 6, в котором приводами других крыльев управляют так, чтобы они двигались.
8. Способ по п. 1, в котором самый медленный привод обнаруживают, сравнивая положения приводов в данный момент.
9. Устройство привода закрылков воздушного судна, содержащее механически независимые приводы для перемещения аэродинамических поверхностей и блок управления, соединенный с приводами и с датчиками положения приводов, содержащихся в приводах, и запрограммированный для приведения приводов в заданные положения и для осуществления способа по п. 1.
10. Воздушное судно, содержащее фюзеляж и две аэродинамические поверхности, расположенные по обе стороны от фюзеляжа и связанные с устройством привода по п. 9.
| EP 831027 A2, 25.03.1998 | |||
| Теплообменник для нагрева сыпучих материалов в псевдоожиженном слое | 1982 |
|
SU1038765A1 |
| СИСТЕМА ЩИТКОВ НА КРЫЛЕ САМОЛЕТА С ЖЕСТКИМ КРЫЛОМ | 2004 |
|
RU2346851C2 |

