ЗАЯВЛЕНИЕ О ФИНАНСИРУЕМОЙ ПРАВИТЕЛЬСТВОМ ПОДДЕРЖКЕ
[0001] Это изобретение было сделано при государственной поддержке по контракту DTFAWA-10-C-00046, заключенному Федеральным управлением гражданской авиации. Правительство США обладает определенными правами на это изобретение.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение в целом относится к авиационным системам.
УРОВЕНЬ ТЕХНИКИ
[0003] Традиционно воздушное судно, испытывающее неожиданное движение рыскания, может скорректировать это движение рыскания, используя руль направления. Корректировка движения рыскания с помощью руля направления может вызвать увеличение лобового сопротивления воздушного судна. Увеличение лобового сопротивления воздушного судна может привести к увеличению расхода топлива. Нужны системы и способы для корректировки движения рыскания без увеличения сопротивления воздушного судна.
КРАТКОЕ ОПИСАНИЕ
[0004] Аспекты и преимущества вариантов осуществления настоящего изобретения будут изложены частично в последующем описании, или могут быть установлены из описания, или могут быть установлены посредством практики вариантов осуществления.
[0005] Один пример аспекта настоящего изобретения относится к способу управления воздушным судном в ответ на движение рыскания. Способ включает в себя обнаружение движения рыскания воздушного судна, причем движение рыскания вызывает перемещение передней части воздушного судна в направлении первой стороны воздушного судна. Способ включает в себя, в ответ на движение рыскания, инициирование процесса балансировки, ведущего к изменению тяги. Процесс балансировки включает в себя увеличение тяги в одном или более двигателях на первой стороне воздушного судна. Процесс балансировки включает в себя уменьшение тяги в одном или более двигателях на второй стороне воздушного судна. Способ включает в себя управление процессом балансировки на основе по меньшей мере частично обнаруженного движения рыскания воздушного судна.
[0006] Другой пример аспекта настоящего изобретения относится к системе управления для стабилизации воздушного судна в ответ на движение рыскания. Устройство управления содержит один или более процессоров и одно или более запоминающих устройств, входящих в состав воздушного судна. Одно или более запоминающих устройств содержат команды, которые при выполнении одним или более процессорами приводят к тому, что один или более процессоров выполняют операции. Операции включают в себя прием данных, указывающих на движение рыскания воздушного судна, причем движение рыскания вызывает перемещение передней части воздушного судна в направлении первой стороны воздушного судна. Операции включают в себя процесс балансировки, приводящий к разности тяг в ответ на движение рыскания. Процесс балансировки включает в себя управление одним или более двигателями на второй стороне воздушного судна для увеличения тяги. Процесс балансировки включает в себя управление одним или более двигателями на второй стороне воздушного судна для уменьшения тяги. Операции включают в себя определение того, когда процесс балансировки исключает движение рыскания. Операции включают в себя повторение процесса балансировки, когда процесс балансировки не исключает движение рыскания. Операции включают в себя поддержание разности тяг, когда процесс балансировки исключает движение рыскания.
[0007] Другие примеры аспектов настоящего изобретения относятся к системам, способам, воздушным судам, авиационным электронным системам, устройствам, машиночитаемым носителям для исключения движения рыскания воздушного судна с разностью тяг. Варианты и модификации могут быть произведены в отношении этих примеров аспектов настоящего изобретения.
[0008] Эти и другие признаки, аспекты и преимущества различных вариантов осуществления станут более понятными со ссылкой на нижеследующее описание и прилагаемую формулу изобретения. Сопроводительные чертежи, которые включены в настоящее описание и составляют его часть, иллюстрируют варианты осуществления настоящего изобретения и вместе с описанием служат для объяснения сопутствующих принципов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Подробное обсуждение вариантов осуществления, предназначенных для специалиста в данной области техники, изложено в описании, которое ссылается на прилагаемые чертежи, на которых:
[0010] Фиг. 1 представляет пример системы управления воздушным судном в соответствии с примерами осуществления настоящего изобретения;
[0011] Фиг. 2 представляет силовую схему свободного тела системы воздушного судна в соответствии с примерами осуществления настоящего изобретения;
[0012] Фиг. 3 представляет силовую схему свободного тела системы воздушного судна в соответствии с примерами осуществления настоящего изобретения;
[0013] Фиг. 4 представляет схему управления, реализуемую контроллером воздушного судна в соответствии с примерами осуществления настоящего изобретения;
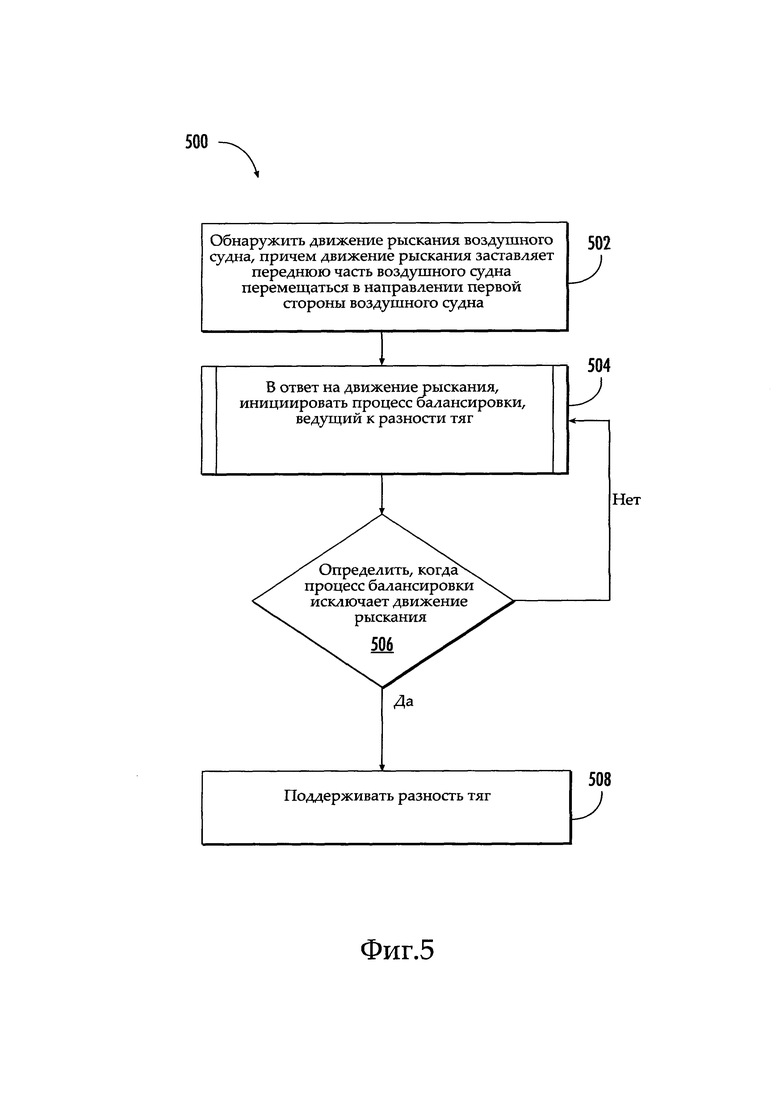
[0014] Фиг. 5 представляет блок-схему примера способа в соответствии с примерами осуществления настоящего изобретения;
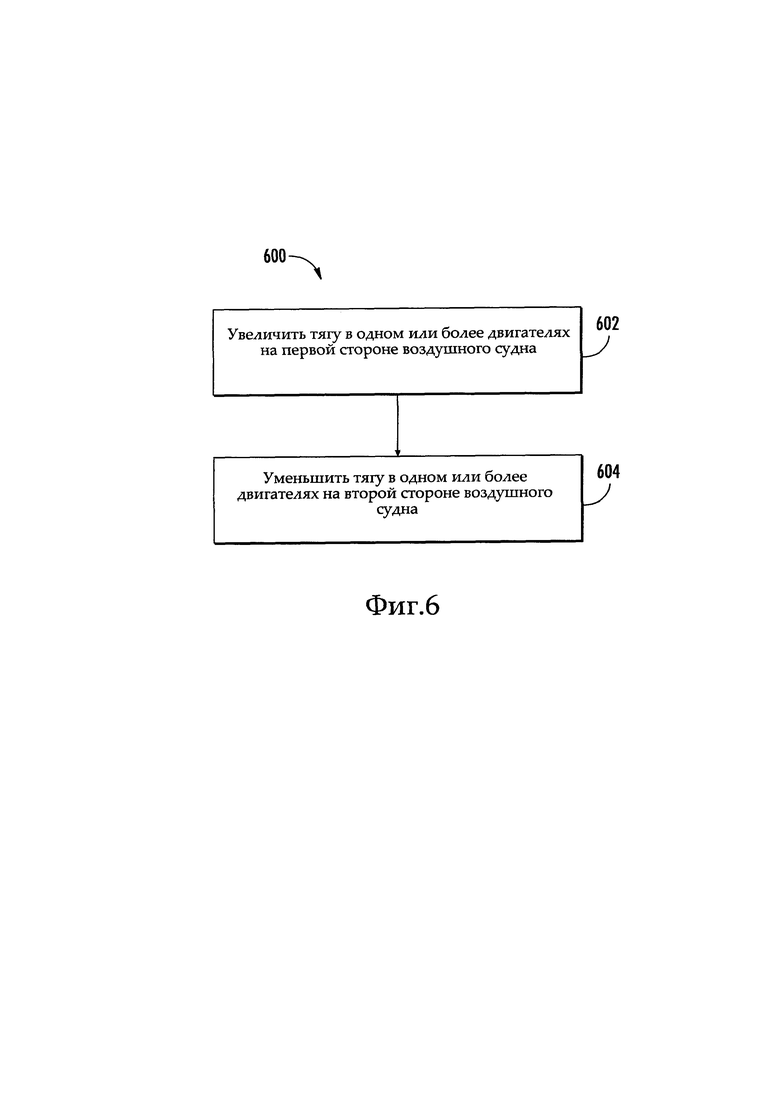
[0015] Фиг. 6 представляет блок-схему примера подспособа в соответствии с примерами осуществления настоящего изобретения; и
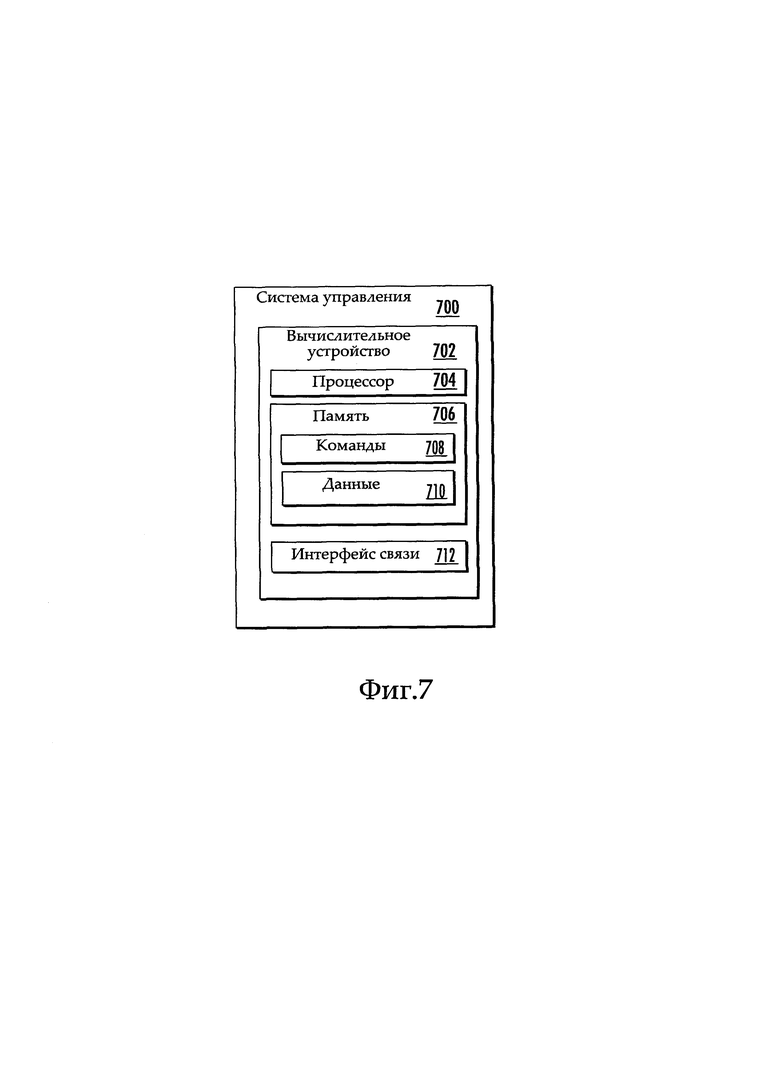
[0016] Фиг. 7 представляет вычислительную систему для реализации одного или более аспектов в соответствии с примерами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0017] Далее будет сделана ссылка на варианты осуществления, один или более примеров которых проиллюстрированы на чертежах. Каждый пример представлен для объяснения вариантов осуществления, а не для их ограничения. В действительности специалистам в данной области техники будет очевидно, что различные модификации и изменения могут быть сделаны в настоящем описании в пределах объема и сущности изобретения. Например, признаки, проиллюстрированные или описанные как часть одного варианта осуществления, могут быть использованы с другим вариантом осуществления для получения еще одного варианта осуществления. Таким образом, предполагается, что настоящее изобретение охватывает такие модификации и изменения, которые входят в объем прилагаемой формулы изобретения или ее эквивалентов.
[0018] Используемые в описании и прилагаемой формуле изобретения формы единственного числа включают множественное число, если контекст явно не указывает на иное. Использование термина «приблизительно» в сочетании с числовым значением относится к значению в пределах 25% от указанной величины.
[0019] Примеры аспектов настоящего изобретения относятся к способам и системам, которые могут позволить воздушному судну корректировать нежелательное движение рыскания (например, движение влево, движение вправо и т.д.) без значительного увеличения расхода топлива. Нежелательное движение рыскания можно регулировать с помощью руля направления. Однако использование руля направления может увеличить лобовое сопротивление воздушного судна. Увеличение сопротивления может коррелировать с необходимостью увеличения тяги для поддержания постоянной скорости. Увеличение тяги может коррелировать с увеличением расхода топлива.
[0020] Способы и системы в соответствии с примерами осуществления настоящего изобретения могут обнаруживать возникновение и направление нежелательного движения рыскания, которое может, например, привести к неожиданному перемещению воздушного судна влево или вправо. Движение рыскания может привести к тому, что воздушное судно будет вращаться вокруг центра масс в направлении рыскания. В ответ на обнаруженное нежелательное движение рыскания один или более двигателей на стороне воздушного судна, которая соответствует нежелательному движению рыскания, могут управляться для увеличения тяги. Например, один или более двигателей на левой стороне воздушного судна могут управляться для увеличения тяги в ответ на нежелательное движение рыскания влево. Кроме того, один или более двигателей на стороне воздушного судна, которая не соответствует направлению нежелательного движения рыскания, могут управляться для уменьшения тяги. Например, один или более двигателей на правой стороне воздушного судна могут управляться для уменьшения тяги в ответ на нежелательное движение рыскания влево.
[0021] В конкретных вариантах осуществления один или более двигателей на стороне воздушного судна, которая не соответствует нежелательному движению рыскания, могут управляться для уменьшения тяги с одной и той же скоростью изменения (но в противоположном направлении) до скорости изменения возрастающей тяги одного или более двигателей на стороне воздушного судна, которая соответствует нежелательному движению рыскания. Один или более двигателей на стороне воздушного судна, которая соответствует направлению нежелательного движения рыскания, могут управляться, чтобы продолжать увеличивать тягу, а один или более двигателей на стороне воздушного судна, которая не соответствует нежелательному направлению движения рыскания, могут управляться, чтобы продолжать уменьшать тягу до тех пор, пока нежелательное движения рыскания не исчезнет.
[0022] В некоторых вариантах осуществления каждый раз, когда воздушное судно испытывает нежелательное движение рыскания, способы и системы в соответствии с примерами аспектов настоящего изобретения могут запускаться заново. Например, когда сила, воздействующая на воздушное судно и заставляющая воздушное судно перемещаться влево, перестает действовать на воздушное судно, это воздушное судно может испытывать нежелательное движение рыскания вправо, вызванное увеличенной тягой от одного или более двигателей на левой стороне воздушного судна и уменьшенной тягой от одного или более двигателей на правой стороне воздушного судна. В этом примере двигатели на левой стороне воздушного судна могут уменьшать тягу, а двигатели на правой стороне воздушного судна могут увеличивать тягу до тех пор, пока нежелательное движение рыскания вправо не прекратится.
[0023] Поскольку тяга одного или более двигателей на одной стороне может увеличиваться с той же скоростью изменения (но в противоположном направлении), как тяга одного или более двигателей на другой стороне, общая тяга, задаваемая всеми двигателями воздушного судна, может оставаться постоянной. При сохранении постоянной полной тяги, задаваемой всеми двигателями воздушного судна, воздушная скорость воздушного судна может оставаться постоянной. Таким образом, примеры аспектов настоящего изобретения могут дать технический эффект, заключающийся в корректировке движений рыскания с уменьшенным воздействием на общую тягу и/или расход топлива воздушного судна.
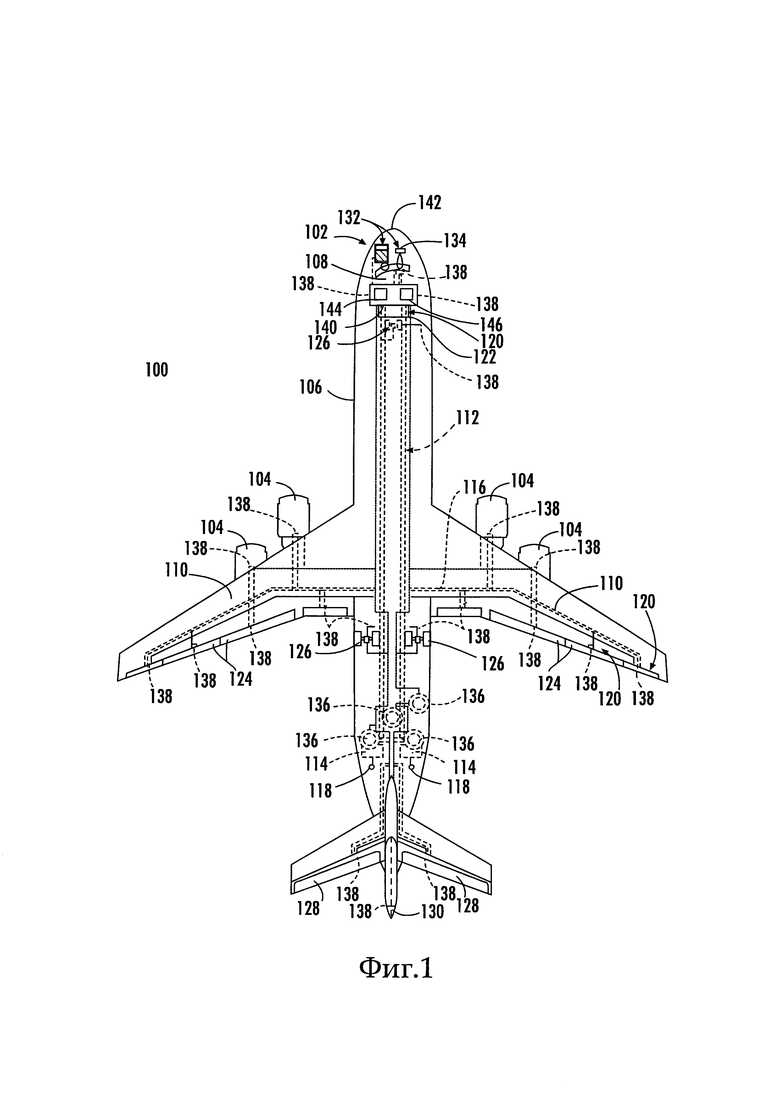
[0024] Фиг. 1 схематически изображает систему 100 для стабилизации движения рыскания на воздушном судне 102 (например, балансировки воздушного судна, исключающей движение рыскания воздушного судна 102, устраняющей движение рыскания воздушного судна 102, подавляющей движение рыскания воздушного судна 102 и т.д.), в соответствии с примерами осуществления настоящего изобретения. Как показано, система 100 может содержать воздушное судно. Воздушное судно 102 может иметь один двигатель или более двигателей 104, соединенных с фюзеляжем 106, кабину 108, расположенную в фюзеляже 106, и узлы 110 крыльев, выходящих наружу из фюзеляжа 106. Гидравлическая система 112 может включать в себя гидравлический бак-накопитель 114 и гидравлическую схему 116. В проиллюстрированном примере были показаны два гидравлических бака-накопителя 114, которые могут быть гидравлически соединены друг с другом через гидравлическую схему 116. Жидкостный датчик 112 может быть функционально связан с каждым из гидравлических баков-накопителей 114, и каждый может выдавать выходной сигнал, указывающий на количество гидравлической жидкости в гидравлическом баке-накопителе 114.
[0025] Гидравлическая схема 116 может подавать гидравлическую жидкость к гидравлическим компонентам 120 воздушного судна 102. Примеры гидравлических компонентов 120 на воздушном судне 102 могут включать в себя тормоза 122, закрылки 124, в том числе множество закрылков и множество предкрылков, спойлеры, установленные впереди закрылков 124, шасси 126, рули 128 высоты, руль 130 направления, реверсеры тяги и т.д. В кабине 108 могут находиться различные механизмы 132 управления для приведения в действие таких гидравлических компонентов 120 или управления ими. Механизмами 132 управления могут быть любые подходящие механизмы. В качестве неограничивающего примера, один механизм 132 управления может представлять собой ручку 134 управления рулем направления, которая может управляться пилотом для установки положения руля 130 направления. Термин «ручка руля направления», используемый в этом описании, не ограничивается физической ручкой, а относится к любому устройству управления, используемому для установки положения руля направления, независимо от того, является ли устройство управления действительной ручкой или кнопкой на сенсорном пользовательском интерфейсе или управляющем устройстве (например, контроллере), которое автоматически регулирует положение руля направления. Один или более насосов 136 могут быть предусмотрены в гидравлической схеме 116 для передачи гидравлической жидкости различным участкам воздушного судна 102, включая гидравлические компоненты 120, и между двумя гидравлическими баками-накопителями 114.
[0026] Ряд датчиков 138 может также быть включен в состав воздушного судна 102, и такие датчики 138 могут выдавать любое количество используемых сигналов, касающихся работы воздушного судна 102 и его различных систем и компонентов. Например, датчики 138 могут включать в себя множество датчиков для определения положения гидравлических компонентов 120, в том числе определения того, используются ли гидравлические компоненты. Кроме того, датчики 138 могут включать в себя множество датчиков движений, которые определяют различные движения воздушного судна 102, включая тангаж, крен, рыскание и ускорение воздушного судна 102.
[0027] Воздушное судно 102 может иметь контроллер 140 для управления, например, стабилизацией воздушного судна во время движения рыскания в соответствии с примерами аспектов настоящего изобретения. В некоторых вариантах осуществления контроллер 140 может содержать одно вычислительное устройство или более вычислительных устройств, как показано на фиг.7. Контроллер 140 может использовать входные сигналы от датчиков 138 для отслеживания движения рыскания воздушного судна 102. Воздушное судно 102 может иметь в своем составе нос 142. Движение рыскания воздушного судна 102 может привести к неожиданному перемещению носа 142 воздушного судна 102 влево или вправо. В ответ на обнаружение движения рыскания воздушного судна 102 контроллер 140 может побудить гидравлическую систему 112 использовать (например, развернуть, отклонить и т.д.) руль 130 направления для стабилизации воздушного судна 102 (например, сбалансировать воздушное судно 102, устранить движение рыскания воздушного судна 102, исключить движение рыскания воздушного судна 102, подавить движение рыскания воздушного судна 102 и т.д.). Например, если движение рыскания воздушного судна 102 заставляет нос 142 воздушного судна 102 перемещаться влево, руль 130 направления может отклониться на правой стороне воздушного судна 102.
[0028] Контроллер 140 может быть соединен с другими контроллерами воздушного судна 102. Контроллер 140 может содержать память 144, память 144 может включать в себя оперативное запоминающее устройство (ОЗУ) (random access memory (RAM)), постоянное запоминающее устройство (ПЗУ) (read-only memory (ROM)), флэш-память или один или более других типов портативной электронной памяти, таких как диски, DVD-диски, ПЗУ на компакт-дисках (CD-ROMs) и т.д., или любые другие подходящие комбинации этих типов памяти. Контроллер 140 может содержать один или более процессоров 146, которые могут выполнять любые подходящие программы.
[0029] В соответствии с примерами осуществления настоящего изобретения котроллер 140 может побуждать один двигатель или более двигателей 104 изменить тягу, чтобы уменьшить потребность в руле 130 направления для стабилизации воздушного судна 102 в целях противодействия движению рыскания. В примере воздушного судна 102, испытывающего рыскание, которое заставляет нос 142 воздушного судна перемещаться влево, контроллер 140 и/или вычислительное устройство (вычислительные устройства) могут побудить один двигатель или более двигателей 104 на узле 110 левого крыла увеличить тягу и побудить один двигатель или более двигателей 104 на узле 110 правого крыла уменьшить тягу. Такое изменение тяги может продолжаться до тех пор, пока воздушное судно 102 не будет стабилизировано, и руль 130 направления больше не будет использоваться.
[0030] Количества, местоположения и/или ориентации компонентов примера системы 100 предназначены для иллюстрации и обсуждения и не предназначены для ограничения. Специалисты в данной области техники, используя изобретение, представленное в настоящем документе, должны понимать, что количества, местоположения и/или ориентации компонентов системы 100 могут быть скорректированы в объеме настоящего изобретения.
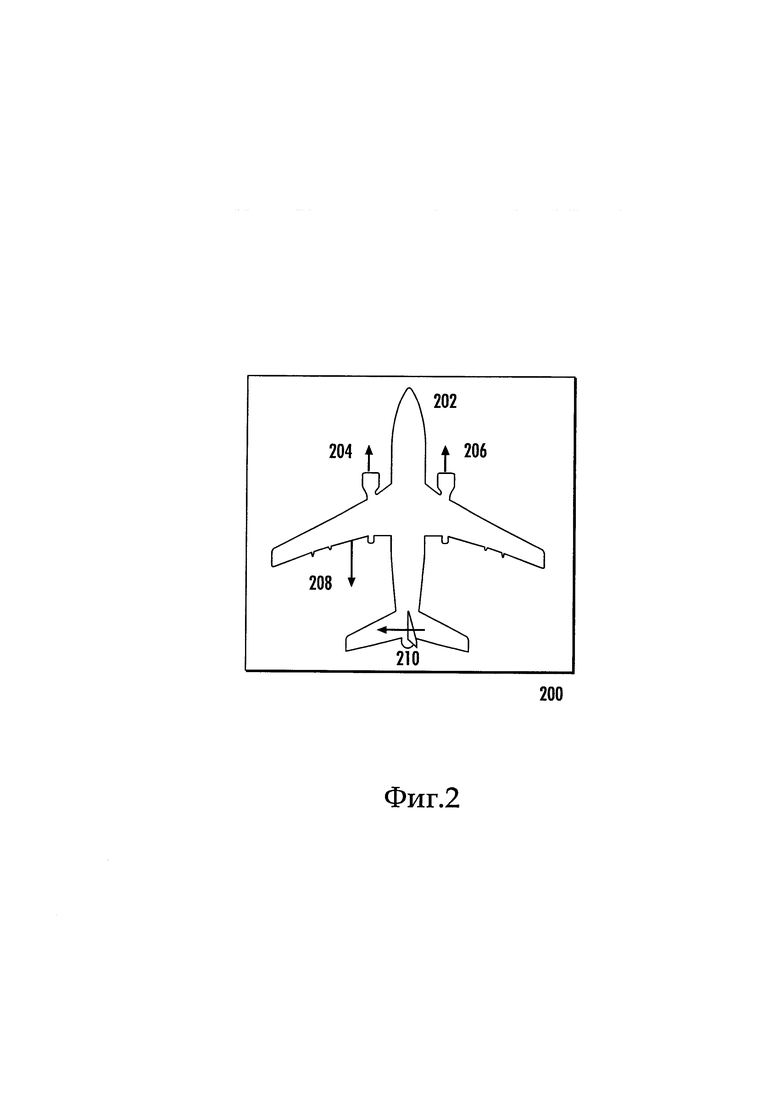
[0031] Фиг. 2 представляет силовую схему 200 свободного тела воздушного судна 202. На воздушное судно 202 может воздействовать первая сила 204, создаваемая тягой одного левого двигателя или более левых двигателей. На воздушное судно 202 может воздействовать вторая сила 206, создаваемая тягой одного правого двигателя или более правых двигателей. В одном аспекте первая сила 204 может быть равна второй силе 206. Первая сила 204 и вторая сила 206 могут влиять на наземную скорость воздушного судна 202.
[0032] В некоторых случаях на воздушное судно 202 влияет третья сила 208, создаваемая сопротивлением на одной стороне воздушного судна 202. Третья сила 208 может в некоторых примерах быть вызвана асимметрией на самолете 202. В одном аспекте третья сила 208 может вызвать движение рыскания воздушного судна 202. В одном аспекте движение рыскания воздушного судна 202 может привести к тому, что нос воздушного судна 202 будет направлен в сторону воздушного судна, испытывающую воздействие третьей силы. Например, третья сила 208 может воздействовать на узел левого крыла, заставляя нос воздушного судна 202 быть направленным влево. В ответ на движение рыскания, отклоненный руль направления воздушного судна 202 может реализовать четвертую силу 210 на воздушном судне. Четвертая сила 210 может использоваться для исключения движения рыскания, вызванного третьей силой 208. Например, четвертая сила 210 может отклонить воздушное судно вправо, чтобы исключить движение рыскания влево. Третья сила 208 и четвертая сила 210 могут вызвать уменьшение путевой скорости воздушного судна 202. Третья сила 208 и четвертая сила 210 могут также привести к тому, что воздушное судно 202 будет расходовать больше топлива для поддержания одной и той же путевой скорости.
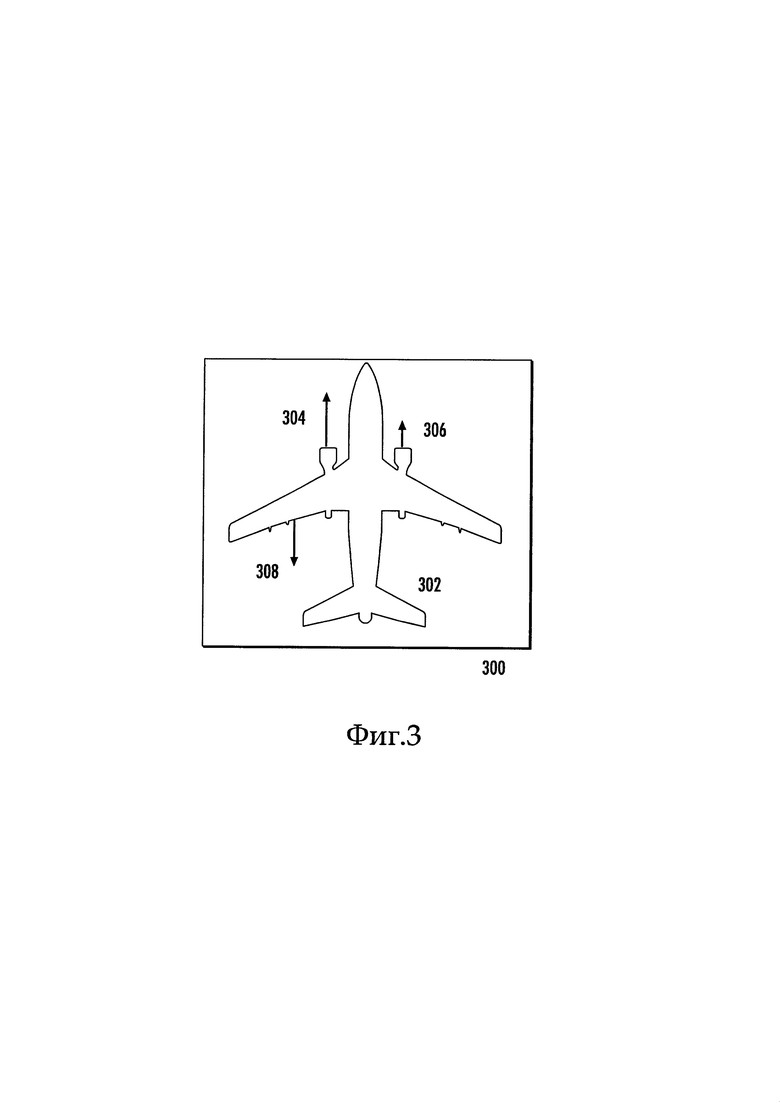
[0033] Фиг. 3 изображает силовую схему 300 свободного тела воздушного судна 302. На воздушное судно 302 может воздействовать первая сила, создаваемая тягой одного левого двигателя или более левых двигателей. На воздушное судно 302 может воздействовать вторая сила 306, создаваемая тягой одного правого двигателя или более правых двигателей. На воздушное судно 302 может воздействовать третья сила 308 (например, создаваемая асимметричным сопротивлением) на одной стороне воздушного судна 302. Третья сила 308 может вызвать движение рыскания воздушного судна 302. Движение рыскания воздушного судна 302 может заставить нос воздушного судна 302 направляться в ту сторону воздушного судна, которая испытывает воздействие третьей силы 308. Например, третья сила 308 может воздействовать на узел левого крыла, заставляя нос воздушного судна 302 направляться влево. В соответствии с аспектами настоящего изобретения тягой двигателей воздушного судна 302 можно управлять для изменения первой силы 304 и второй силы 306, чтобы исключить движение рыскания воздушного судна, создаваемого третьей силой 308. В одном примере первая сила 304 может увеличиваться, а вторая сила 306 может уменьшаться. Первая сила 304 может увеличиться на некоторую величину, и вторая сила 306 может уменьшиться на ту же самую величину. Увеличение первой силы 304 и уменьшение второй силы 306 может устранить движение рыскания воздушного судна 302 без увеличения лобового сопротивления воздушного судна 302.
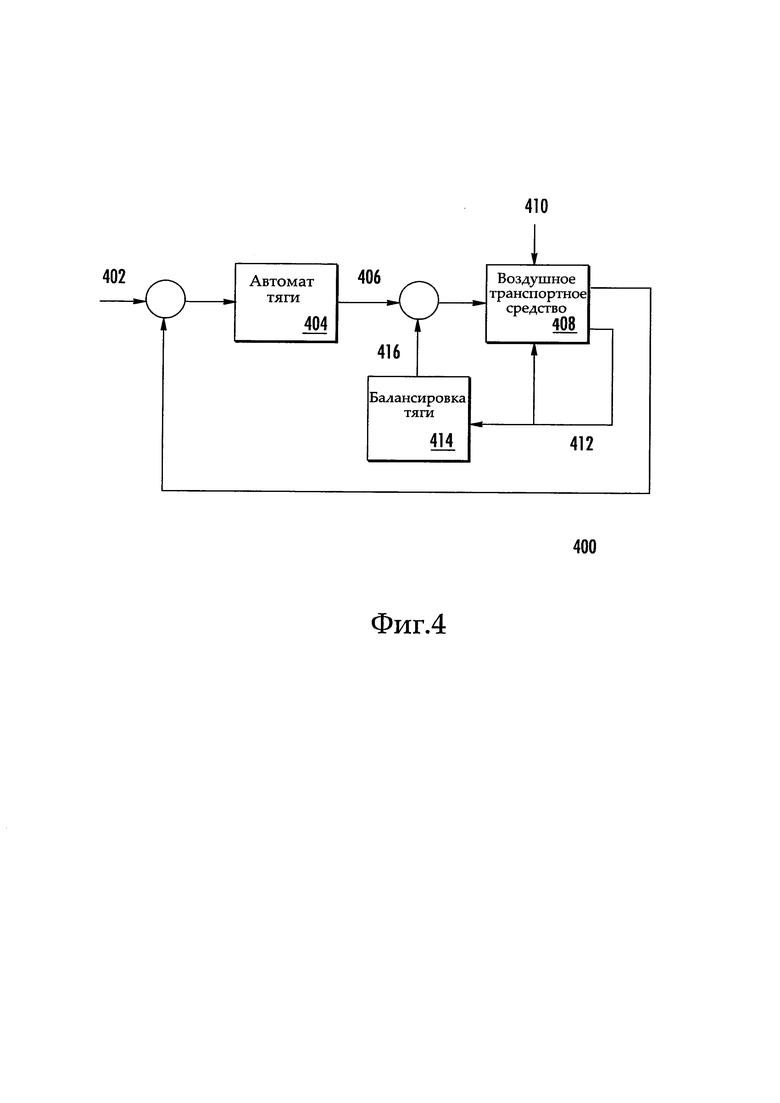
[0034] Фиг. 4 изображает схему 400 управления, реализуемую контроллером воздушного судна в соответствии с примерами осуществления настоящего изобретения. Может быть принята команда 402 для включения системы 404 автомата тяги. В некоторых вариантах осуществления команда 402 может базироваться на угле поворота ручки управления тягой. В одном аспекте система 404 автомата тяги может использоваться для поддержания заданной скорости на основе команды 402. В одном аспекте система 404 автомата тяги может использоваться для поддержания заданной тяги. Например, в одном варианте осуществления угол 406 регулятора тяги может установить тягу воздушного судна 408.
[0035] Воздушное судно 408 может испытывать силу асимметричного сопротивления, вызывающую движение рыскания воздушного судна 408. Одна или более систем воздушного судна 408 могут обнаружить силу асимметричного сопротивления. Одна или более систем воздушного судна 408 могут выдавать сигнал 410, указывающий на силу асимметричного сопротивления. Одна или более систем воздушного судна 408, выдающих сигнал 410, могут включать в себя один или более датчиков движения рыскания. Движение рыскания на воздушном судне 408 может вызвать перемещение носа воздушного судна 408 в одну сторону. Руль направления может быть отклонен под углом 412, чтобы исключить движение рыскания на воздушном судне 408. Угол 412 отклонения руля направления может быть принят в системе 414 балансировки тяги. Система 414 балансировки тяги может оценить (например, вычислить, определить, принять решение, отрегулировать и т.д.) изменение 416 угла регулятора тяги на основе угла 412 отклонения руля направления. Изменение 416 угла регулятора тяги может быть добавлено к углу 406 регулятора тяги, отправленному на один или более двигателей на той стороне, к которой движение рыскания заставляет перемещаться нос воздушного судна, чтобы обеспечить увеличение тяги. Изменение 416 угла регулятора тяги может быть вычтено из угла 406 регулятора тяги, отправленного на один или более двигателей на другой стороне воздушного судна, чтобы обеспечить уменьшение тяги.
[0036] После того, как двигатели отрегулируют свою тягу на основе изменения 416 угла регулятора тяги, система 414 балансировки тяги снова может принять угол 412 отклонения руля направления. Если угол 412 отклонения руля направления не равен нулю градусов (или не находится в пределах порогового значения от нуля градусов), то можно оценить новое изменение 416 угла регулятора тяги. Пороговым значением может быть, например, число градусов и/или долей градуса. Если угол 412 отклонения руля направления равен нулю градусов (или находится в пределах порогового значения от нуля градусов), то система 414 балансировки тяги может поддерживать постоянным изменение 416 угла регулятора тяги. Когда система 414 балансировки тяги принимает угол 412 отклонения руля направления, отличный от нуля градусов (или не находящийся в пределах порогового значения от нуля градусов), система 414 балансировки тяги может оценить другое изменение 416 угла регулятора тяги. Если система 404 автомата тяги получает команду на поддержание заданной скорости, а воздушное судно 408 больше не находится на заданной скорости, то система 404 автомата тяги может отрегулировать угол 406 регулятора тяги. Если регулировки угла 406 регулятора тяги приводят к тому, что угол 412 отклонения руля направления будет отличным от нуля градусов (или не будет в пределах порового значения от нуля градусов), то система 414 балансировки тяги может оценить новое изменение 416 угла регулятора тяги.
[0037] В некоторых вариантах осуществления система 414 балансировки тяги может быть выполнена с возможностью действовать медленно или с большой постоянной времени. В таких вариантах осуществления система 414 балансировки тяги может потребовать длительного наличия угла 412 отклонения руля направления, указывающего на отклонение руля направления, перед оценкой изменения 416 угла регулятора тяги. Конфигурирование системы 414 балансировки тяги, чтобы действовать медленно или с большой постоянной времени, может помочь предотвратить вмешательство системы 414 балансировки тяги в другие системы воздушного судна 408. Например, система 414 балансировки тяги может изменить скорость воздушного судна 408 относительно скорости, заданной командой 402. Если бы система 414 балансировки тяги меняла изменение 416 угла регулятора тяги с той же скоростью, что и система автопилота, изменяя тягу, чтобы учитывать изменение скорости из системы 414 балансировки тяги, тогда две системы могли бы помешать друг другу достичь желаемого состояния. Кроме того, конфигурирование системы 414 балансировки тяги, чтобы действовать медленно или с большой постоянной времени помогает системе 414 балансировки тяги реагировать на сопротивление, которое не является скоротечным. Например, сопротивление, которое является скоротечным, может завершиться прежде, чем система балансировки тяги оценит изменение 416 угла регулятора тяги. Кроме того, система 414 балансировки тяги может использовать больше топлива, чтобы скорректировать кратковременное сопротивление, чем будет сэкономлено при использовании изменения 416 угла регулятора тяги.
[0038] Фиг. 5 представляет блок-схему примера способа (500) управления воздушным судном в ответ на движение рыскания в соответствии с примерами осуществления настоящего изобретения. Фиг. 5 отображает шаги, выполненные в определенном порядке для целей иллюстрации и обсуждения. Специалисты в данной области техники, используя раскрытие, изложенное в настоящем документе, поймут, что различные шаги любого из описанных здесь способов могут быть адаптированы, опущены, перегруппированы, расширены или модифицированы различными способами в объеме настоящего изобретения.
[0039] На шаге (502) может быть обнаружено движение рыскания воздушного судна. Движение рыскания может побудить переднюю часть (например, нос, концевую часть и т.д.) воздушного судна перемещаться к первой стороне воздушного судна. Движение рыскания может побудить воздушное судна вращаться вокруг центра масс в направлении рыскания. Движение рыскания может быть обнаружено путем получения данных, указывающих на движение рыскания воздушного судна.
[0040] Например, в некоторых вариантах осуществления данные, указывающие на движение рыскания воздушного судна, могут включать в себя данные, указывающие на отклонение от плана полета. В некоторых вариантах осуществления данные, указывающие на движение рыскания воздушного судна, могут включать в себя данные, указывающие на отклонение от плана полета, посредством заранее заданного порога. В некоторых вариантах осуществления данные, указывающие на движение рыскания воздушного судна, могут включать в себя данные, указывающие на отсутствие отклика одного или более элементов управления. В некоторых вариантах осуществления данные, указывающие на движение рыскания воздушного судна, могут включать в себя данные, указывающие на отклонение руля направления. В некоторых вариантах осуществления движение рыскания воздушного судна может включать в себя обнаружение отклонение руля направления. В некоторых вариантах осуществления обнаружение движения рыскания воздушного судна может включать в себя отсутствие отклика одного или более элементов управления. В некоторых вариантах осуществления обнаружение движения рыскания воздушного судна может включать в себя обнаружение отказа одного или более двигателей на первой стороне воздушного судна. Отказ может быть следствием повреждения посторонним предметом. Оно может быть вызвано, например, ударом птицы, накоплением и сбрасыванием льда и т.д. В некоторых вариантах осуществления обнаружение движения рыскания воздушного судна может включать в себя получение данных о первом движении рыскания посредством одного или более датчиков движения рыскания.
[0041] На шаге (504) в ответ на движение рыскания может быть инициирован процесс балансировки, приводящий к разности тяг. В некоторых вариантах осуществления процесс балансировки может быть выполнен независимо от отклонения руля направления. Например, движение рыскания может быть недостаточно значительным, чтобы вызвать отклонение руля направления, но может быть обнаружено одним или более датчиками рыскания. Фиг. 6 представляет блок-схему примера подспособа (600) для выполнения процесса балансировки в (504) по фиг.5 в соответствии с примерами осуществления настоящего изобретения. На шаге (602) процесс балансировки может включать в себя увеличение тяги в одном или более двигателях на первой стороне воздушного судна. На шаге (604) процесс балансировки может включать в себя уменьшение тяги в одном или более двигателях на второй стороне воздушного судна. Увеличение тяги в одном или более двигателях на первой стороне воздушного судна может быть равно уменьшению тяги в одном или более двигателях на второй стороне воздушного судна. В одном аспекте увеличение тяги в одном или более двигателях на первой стороне воздушного судна может быть равно уменьшению тяги в одном или более двигателях на второй стороне воздушного судна таким образом, чтобы можно было поддерживать общую тягу. Общая тяга может быть такой же, как и тяга, запрашиваемая автоматом тяги. Поддержание общей тяги в качестве тяги, запрошенной автоматом тяги, может поддерживать воздушную скорость. В одном аспекте процесс балансировки не изменяет сопротивление воздушного судна. В одном аспекте процесс балансировки не увеличивает сопротивление воздушного судна. В одном аспекте процесс балансировки не изменяет расход топлива воздушного судна. В одном аспекте процесс балансировки не увеличивает расход топлива воздушного судна. В одном аспекте процесс балансировки не изменяет скорость воздушного судна. Процесс балансировки может выполняться как обычная часть работы. Процесс балансировки может выполняться, когда воздушное судно летит на крейсерском режиме.
[0042] Возвращаясь к фиг.5, на шаге (506) может быть осуществлено определение, когда процесс балансировки исключает движение рыскания. В некоторых вариантах осуществления определение, когда процесс балансировки исключает движение рыскания, может включать в себя определение, когда угол отклонения руля направления равен нулю градусов (или в пределах порогового значения от нуля градусов). В некоторых вариантах осуществления определение, когда процесс балансировки исключает движение рыскания, может включать в себя получение данных о втором движении рыскания посредством одного или более датчиков движения рыскания. В одном примере осуществления данные о втором движении рыскания могут указывать на отсутствие движения рыскания или на движение рыскания ниже порога. Когда процесс балансировки не исключает движение рыскания, способ (500) может вернуться к (504) и повторить процесс балансировки.
[0043] Когда процесс балансировки исключает движение рыскания, способ (500) может перейти к шагу (508) и поддерживать разность тяг. Лобовое сопротивление воздушного судна в то время, когда разность тяг поддерживается, может в общем соответствовать сопротивлению воздушного судна до процесса балансировки или быть ниже его. В одном аспекте, если лобовое сопротивление воздушного судна в процессе балансировки («второе сопротивление») находится в пределах 35% от сопротивления воздушного судна до процесса балансировки («первое сопротивление»), можно сказать, что второе сопротивление в общем соответствует первому сопротивлению.
[0044] Скорость расхода топлива, в то время как поддерживается разность тяг, может быть в общем соответствовать скорости расхода топлива или ниже ее до процесса балансировки. В одном аспекте, если скорость расхода топлива в процессе балансировки («вторая скорость расхода топлива») находится в пределах 35% от скорости расхода топлива до процесса балансировки («первая скорость расхода топлива»), можно сказать, что вторая скорость расхода топлива в общем соответствует первой скорости расхода топлива.
[0045] Опционально, могут быть получены данные, указывающие на то, что сила, воздействующая на движение рыскания, прекратила действовать на воздушное судно. Разность тяг может перестать поддерживаться в ответ на обнаружение того, что сила, воздействующая на движение рыскания, прекратила действовать на воздушное судно. Лобовое сопротивление воздушного судна после того, как разность тяг перестает поддерживаться, может в общем соответствовать сопротивлению воздушного судна в то время, когда разность тяг поддерживается. Скорость расхода топлива после того, как разность тяг перестает поддерживаться, может в общем соответствовать скорости расхода топлива в то время, когда разность тяг поддерживается.
[0046] Фиг. 7 представляет структурную схема примера вычислительной системы, которая может использоваться для реализации системы 700 управления или других систем воздушного судна в соответствии с примерами осуществления настоящего изобретения. Как показано, система 700 управления может содержать одно или более вычислительных устройств. Одно или более вычислительных устройств 702 могут содержать один или более процессоров 704 и одно или более запоминающих устройств 706. Один или более процессоров 704 могут включать в себя любое подходящее устройство обработки, например микропроцессор, микроконтроллер, интегральную схему, логическую схему или другое подходящее устройство обработки. Одно или более запоминающих устройств 706 могут включать в себя один или более машиночитаемых носителей, включая, но не ограничиваясь этим, постоянные машиночитаемые носители, ОЗУ, ПЗУ, жесткие диски, флэш-накопители или другие запоминающие устройства.
[0047] Одно или более запоминающих устройств 706 могут хранить информацию, доступную одному или нескольким процессорам 704, включая машиночитаемые команды 708, которые могут быть выполнены одним или более процессорами 704. Команды 708 могут представлять собой любой набор команд, которые при выполнении одним или более процессорами 704 побуждают один или более процессоров 704 выполнять операции. Команды 708 могут представлять собой программные средства, написанные на любом подходящем языке программирования, или могут быть реализованы на аппаратном уровне. В некоторых вариантах осуществления команды 708 могут выполняться одним или более процессорами 704, чтобы побудить один или более процессоров 704 выполнять операции, например операции для исключения движения рыскания воздушного судна, как описано со ссылкой на фиг.5, и/или любых других операций или функций одного вычислительного устройства или более вычислительных устройств 702.
[0048] Запоминающее устройство (запоминающие устройства) 706 могут дополнительно хранить данные 710, к которым могут обращаться процессоры 704. Например, данные 710 могут включать в себя навигационную базу данных, данные, связанные с навигационной системой (навигационными системами), данные, связанные с механизмами 132 управления, данные, указывающие на план полета, связанный с воздушным судном 102, данные, связанные с гидравлическими компонентами 120, такими так руль 130 направления, и/или любые другие данные, связанные с воздушным судном 102, как описано в настоящем документе. Данные 710 могут включать в себя одну таблицу или более таблиц, функцию (функций), алгоритм (алгоритмов), уравнение (уравнений) и т.д. для определения движения рыскания воздушного судна 102 в соответствии с примерами осуществления настоящего изобретения.
[0049] Одно или более вычислительных устройств 702 могут также содержать интерфейс 712 связи, используемый для связи, например, с другими компонентами системы. Интерфейс 712 связи может содержать компоненты для связи с пользователем, такие как устройство вывода для вывода информации индикации, аудио или тактильной информации пользователю. Интерфейс 712 связи может содержать любые подходящие компоненты для взаимодействия с одной сетью или более сетями, включая, например, передатчики, приемники, порты, контроллеры, антенны или другие подходящие компоненты.
[0050] Хотя конкретные признаки различных вариантов осуществления показаны на некоторых чертежах, а не на других, это делается только в целях удобства. В соответствии с принципами настоящего изобретения любой признак какого-либо чертежа может быть использован в комбинации с любым признаком любого другого чертежа.
[0051] В этом описании используются примеры для раскрытия изобретения, включая наилучший вариант, для того, чтобы любой специалист в данной области мог использовать на практике изобретение, включая изготовление и использование любых устройств и систем и выполнение любых связанных с ними способов. Объем изобретения определяется формулой изобретения и может включать в себя другие примеры, которые очевидны для специалистов в данной области техники. Такие другие примеры находятся в пределах объема формулы изобретения, если они содержат структурные элементы, которые не отличаются от буквальной формулировки формулы изобретения, или если они содержат эквивалентные структурные элементы с несущественными отличиями от буквальных формулировок формулы изобретения.
Группа изобретений относится к способу управления воздушным судном в ответ на движение рыскания, системе управления для стабилизации воздушного судна в ответ на движение рыскания, воздушному судну, содержащему такую систему. Для управления воздушным судном обнаруживают движение рыскания, инициируют процесс балансировки, включающий увеличение тяги в одном или более двигателей на первой стороне воздушного судна и уменьшение тяги в одном или более двигателей на второй стороне воздушного судна, поддерживают разность тяг, когда движение рыскания исключается, повторяют процесс балансировки, когда оно не исключается. Система управления содержит один или более процессоров и одно или более запоминающих устройств, хранящих команды для исполнения способа. Обеспечивается корректировка движения рыскания без увеличения сопротивления воздушного судна. 3 н. и 13 з.п. ф-лы, 7 ил.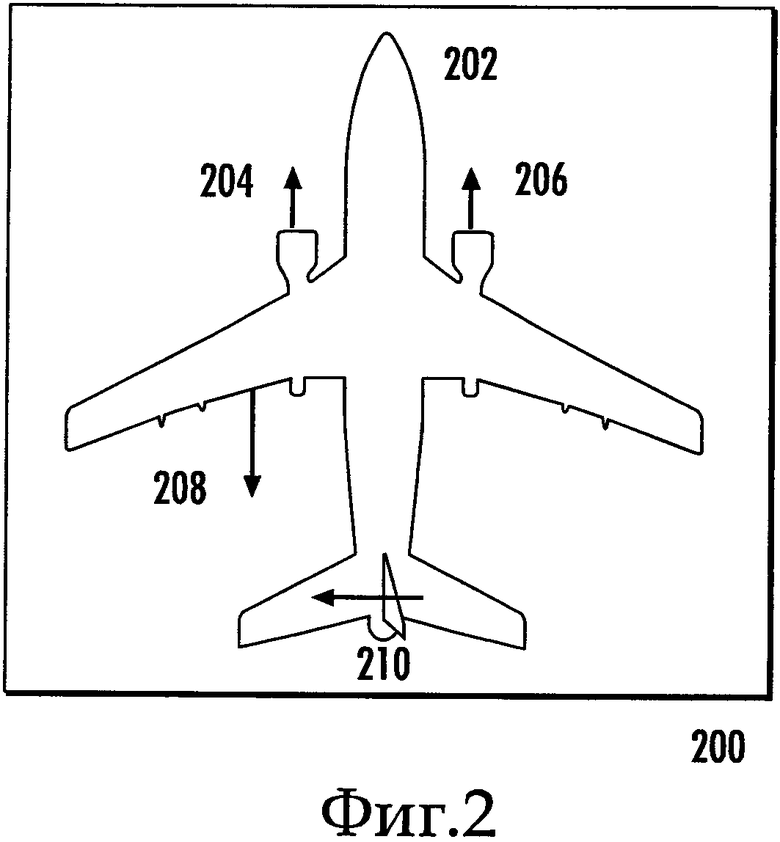
1. Способ управления воздушным судном в ответ на движение рыскания, включающий:
обнаружение движения рыскания воздушного судна, причем движение рыскания вызывает перемещение передней части воздушного судна в направлении первой стороны воздушного судна;
в ответ на движение рыскания инициирование процесса балансировки, приводящего к разности тяг, при этом процесс балансировки включает:
увеличение тяги в одном или более двигателях на первой стороне воздушного судна; и
уменьшение тяги в одном или более двигателях на второй стороне воздушного судна; и
управление процессом балансировки на основе по меньшей мере частично обнаруженного движения рыскания воздушного судна, включающее:
определение, когда процесс балансировки исключает движение рыскания;
повторение процесса балансировки, когда процесс балансировки не исключает движения рыскания; и
поддержание разности тяг, когда процесс балансировки исключает движение рыскания,
при этом лобовое сопротивление воздушного судна в процессе балансировки соответствует лобовому сопротивлению воздушного судна до процесса балансировки или ниже его.
2. Способ по п. 1, в котором обнаружение движения рыскания воздушного судна включает обнаружение того, что руль направления отклонен.
3. Способ по п. 1, в котором определение, когда процесс балансировки исключает движение рыскания, представляет собой определение, когда угол отклонения руля направления находится в пределах порогового значения от нуля градусов.
4. Способ по п. 1, в котором скорость расхода топлива в то время, когда поддерживают разность тяг, соответствует скорости расхода топлива до процесса балансировки или ниже ее.
5. Способ по п. 1, в котором управление процессом балансировки на основе по меньшей мере частично обнаруженного движения рыскания воздушного судна включает:
обнаружение того, что сила, вызывающая движение рыскания, перестала действовать на воздушное судно; и
прекращение поддержки разности тяг в ответ на обнаружение того, что сила, вызывающая движение рыскания, перестала действовать на воздушное судно,
при этом скорость расхода топлива после того, как разность тяг прекращают поддерживать, соответствует скорости расхода топлива в то время, когда разность тяг поддерживают.
6. Способ по п. 5, в котором лобовое сопротивление воздушного судна после того, как разность тяг прекращают поддерживать, соответствует лобовому сопротивлению воздушного судна в то время, когда разность тяг поддерживают.
7. Способ по п. 1, в котором увеличение тяги в одном или более двигателях на первой стороне воздушного судна равно уменьшению тяги в одном или более двигателях на второй стороне воздушного судна.
8. Способ по п. 1, в котором обнаружение движения рыскания воздушного судна включает обнаружение того, что воздушное судно отклонилось от плана полета на пороговую величину.
9. Способ по п. 1, в котором обнаружение движения рыскания воздушного судна включает обнаружение отсутствия отклика в одном или более элементах управления.
10. Способ по п. 1, в котором обнаружение движения рыскания воздушного судна включает обнаружение отказа в одном или более двигателях на первой стороне.
11. Способ по п. 10, в котором отказ происходит в ответ на повреждение посторонним предметом.
12. Способ по п. 1, в котором обнаружение движения рыскания воздушного судна включает получение данных о первом движении рыскания посредством одного или более датчиков движения рыскания.
13. Способ по п. 12, в котором определение, когда процесс балансировки исключает движение рыскания, включает получение данных о втором движении рыскания посредством одного или более датчиков движения рыскания.
14. Система управления для стабилизации воздушного судна в ответ на движение рыскания, причем система содержит один или более процессоров и одно или более запоминающих устройств, входящих в состав воздушного судна, и одно или более запоминающих устройств хранят команды, которые при выполнении одним или более процессорами побуждают один или более процессоров выполнять операции, которые включают:
получение данных, указывающих на движение рыскания воздушного судна, при этом движение рыскания заставляет переднюю часть воздушного судна перемещаться в направлении первой стороны воздушного судна;
процесс балансировки, ведущий к разности тяг, в ответ на движение рыскания, причем процесс балансировки включает:
управление одним или более двигателями на первой стороне воздушного судна для увеличения тяги; и
управление одним или более двигателями на второй стороне воздушного судна для уменьшения тяги; и
определение, когда процесс балансировки исключает движение рыскания; повторение процесса балансировки, когда процесс балансировки не исключает движение рыскания; и
поддержание разности тяг, когда процесс балансировки исключает движение рыскания,
при этом лобовое сопротивление воздушного судна в процессе балансировки соответствует лобовому сопротивлению воздушного судна до процесса балансировки или ниже его.
15. Система управления по п. 14, в которой процесс балансировки не изменяет скорости воздушного судна.
16. Воздушное судно, содержащее:
один или более первых двигателей, расположенных на первой стороне воздушного судна;
один или более вторых двигателей, расположенных на второй стороне воздушного судна;
руль направления;
вычислительную систему, содержащую один или более процессоров и одно или более запоминающих устройств, расположенных на воздушном судне, причем одно или более запоминающих устройств хранят команды, которые при выполнении одним или более процессорами побуждают один или более процессоров выполнять операции, включающие:
обнаружение отклонения рыскания на первой стороне воздушного судна;
выполнение процесса балансировки в ответ на отклонение руля направления, при этом процесс балансировки включает:
определение угла отклонения руля направления;
управление одним или более первыми двигателями для увеличения тяги;
управление одним или более вторыми двигателями для уменьшения тяги; и
повторение процесса балансировки, когда угол отклонения руля направления не находится в пределах порогового значения от нуля градусов.
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА | 1995 |
|
RU2084375C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2537883C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ, САМОЛЕТ И СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2012 |
|
RU2561168C2 |
| Способ управления ракет-носителей пакетной схемы по осям тангажа и рыскания | 1991 |
|
SU1819804A1 |
| US 8820676 B2, 02.09.2014 | |||
| US 20150108271 A1, 23.04.2015 | |||
| US 6892980 B2, 17.05.2005. | |||

