Изобретение относится к области гидроакустики, может быть использовано при решении задач обработки шумового сигнала в гидроакустических системах и предназначено для распознавания шумов в том случае, когда в одном направлении могут присутствовать несколько источников шума, неразделяемых по углу наблюдения.
Известны способы классификации морских объектов на основании анализа излучаемых ими гидроакустических шумов [Волкова А.А, Консон А.Д.; Акционерное общество «Концерн «Океанприбор». Способ классификации морских объектов по уровню шума в источнике. Патент №2767001 РФ, МПК G01S3/80. №2021109455; Заявл. 05.04.2021; Опубл. 16.03.2022, Бюл. №8; Марасев С.В, Машошин А.И, Подшивалов Г.А; Акционерное общество «Концерн «ЦНИИ «Электроприбор». Способ определения класса шумящей цели и дистанции до нее. Патент №2681432 РФ, МПК G01S 15/00. №2018113387; Заявл. 12.04.2018; Опубл. 06.03.2019, Бюл. №7; Знаменская Т.К, Афанасьев А.Н; Акционерное общество «Концерн «Океанприбор». Способ классификации гидроакустических сигналов шумоизлучения морского объекта. Патент №2754602 РФ, МПК G01S3/80. №2020138063; Заявл. 19.11.2020; Опубл. 03.09.2021, Бюл. №25; Знаменская Т.К; Акционерное общество «Концерн «Океанприбор». Способ классификации гидроакустических сигналов шумоизлучения морского объекта. Патент №2603886 РФ, МПК G01S 3/80. №2015136001/28; Заявл. 25.08.2015; Опубл. 10.12.2016, Бюл. №34].
Указанные способы основаны на анализе различных классификационных признаков объектов, для формирования которых в этих и других способах объективной классификации используют измеренную в шумовом процессе мощность сигнала в частотных полосах различной ширины и (или) с различным положением на оси частот. При этом предполагается, что шумовой процесс порожден только одним объектом, что считается выполненным при условии фазирования антенны на обнаруженный сигнал в горизонтальном направлении. Однако, дальность обнаружения объектов современными гидроакустическими системами достигает сотен километров [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. - СПб.: Наука. - 2004]. Тогда в одном горизонтальном направлении одновременно могут присутствовать несколько объектов, находящихся на разных расстояниях и (или) глубинах погружения. Шумовые сигналы таких объектов будут присутствовать на входе антенны в виде неразделимой смеси. В этом случае, мощность сигнала якобы одного объекта будет измерена неверно, что приведет к ошибке при формировании классификационных признаков, и, следовательно, - к ошибочному результату классификации.
Желательно иметь способ, позволяющий перед процедурой классификации осуществлять проверку на отсутствие в принятом шумовом процессе смеси сигналов нескольких объектов.
Наиболее близким аналогом по выполняемым процедурам и техническому результату к предлагаемому изобретению является способ [Тимошенков В.Г; Акционерное общество «Концерн «Океанприбор». Способ классификации шумящих объектов. Патент №2570430 РФ, МПК G01S 3/80. №2014141238/28; Заявл. 13.10.2014; Опубл. 10.12.2015, Бюл.№34], в котором перед процедурой классификации осуществляется именно такая проверка.
В указанном способе для распознавания объектов в гидроакустической системе выполняются следующие основные операции:
принимают шумовой процесс гидроакустический антенной, сфокусированной в горизонтальном направлении,
измеряют автокорреляционную функцию шумового процесса,
анализируют автокорреляционную функцию,
если в огибающей автокорреляционной функции отсутствуют перегибы, то принимают решение о наблюдении одиночного объекта и осуществляют классификацию этого объекта,
если в огибающей автокорреляционной функции присутствуют перегибы, то принимают решение о наблюдении группы объектов и не осуществляют классификацию. У указанного способа можно выделить два недостатка.
Во-первых, в описании способа указано, что перегибы автокорреляционной функции должен визуально обнаружить оператор, который, при этом, должен обладать достаточными знаниями и опытом работы. Обязательное участие оператора увеличивает время принятия решения.
Во-вторых, способ основан на том, что ширина основного максимума огибающей автокорреляционной функции зависит от ширины спектра сигнала, которая, в свою очередь, уменьшается при увеличении расстояния. Однако, смесь сигналов от нескольких объектов, разнесенных по расстоянию, будет давать наличие перегибов в огибающей автокорреляционной функции только в том случае, если ширина спектров всех сигналов, входящих в смесь, одинакова в точке излучения, что не выполняется для объектов разных классов [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. - СПб.: Наука. - 2004]. Кроме того, в принятом шумовом процессе может присутствовать смесь сигналов от объектов, разнесенных не по расстоянию, а по глубине. Тогда решение о наличии в шумовом процессе сигнала одиночного объекта может быть принято неверно.
Задача изобретения - распознать в принятом шумовом процессе наличие или отсутствие смеси сигналов нескольких объектов, неразделяемых по углу наблюдения.
Для решения поставленной задачи в способ распознавания гидроакустических шумов морских объектов, в котором
принимают шумовой процесс гидроакустический антенной, сфокусированной в горизонтальном направлении,
определяют автокорреляционную функцию шумового процесса,
анализируют автокорреляционную функцию,
и принимают решение о наблюдении одиночного объекта или решение о наблюдении группы объектов,
введены новые признаки, а именно:
определяют ряд теоретически возможных количеств задержек по времени между приходом сигнала по различным лучам для одиночного объекта Mi = ni (ni - 1)/2, где ni = 1, 2, … N - ряд количества лучей, по которым может распространяться сигнал,
при анализе автокорреляционной функции измеряют количество задержек по времени в принятом сигнале,
сравнивают измеренное количество задержек с каждым членом ряда возможных количеств задержек,
в случае совпадения измеренного количества задержек с одним из членов ряда возможных количеств задержек принимают решение о наблюдении одиночного объекта,
в противном случае принимают решение о наблюдении группы объектов.
Техническим результатом изобретения является возможность автоматического и объективного распознавания наличия в принятом шумовом процессе сигнала одиночного объекта или смеси сигналов нескольких объектов.
Покажем возможность достижения указанного технического результата.
Рассмотрим распространение звука в морской среде от источника сигнала к приемнику. В горизонтальной плоскости звуковой сигнал распространяется прямолинейно, а в вертикальной плоскости - претерпевает рефракцию, то есть его путь искривляется, что связано в морской среде с непостоянством скорости распространения звука на разных глубинах. В рамках лучевой теории [Бреховских Л.М., Лысанов Ю.П. Теоретические основы акустики океана. - М.: Наука. - 2007] это объясняется через понятие лучевой трубки (или кратко луча). Под лучом понимают звуковой сигнал, выходящий из источника и проходящий на некотором удалении от него через произвольно малый контур. В рамках лучевой теории считают, что звуковая энергия распространяется по совокупности лучевых трубок (лучей), не пресекая их стенок.. Из источника сигнала в сторону приемника выходит бесконечное множество лучей в вертикальной плоскости под углами от +90° вверх до -90° вниз относительно горизонтальной плоскости. Каждый из этих лучей распространяется по своей уникальной траектории, претерпевая полные внутренние отражения и (или) отражаясь от дна или поверхности моря.
Несмотря на то, что из источника выходит бесконечное множество лучей, не все из них достигают приемника, находящегося в фиксированной точке по глубине и дальности. Многие из лучей теряют большую долю своей интенсивности при отражениях от поверхности моря и его дна, а другие имеют такую траекторию, которая для фиксированного расстояния до приемника проходит ниже или выше глубины его погружения. Таким образом, одиночный источник и приемник, как фиксированные точки связывает между собой ограниченное количество лучей. Другой источник, находящийся на другой дальности или глубине, связывает с тем же приемником, в общем случае, другое количество других лучей.
Каждый луч характеризуется своей уникальной траекторией и временем распространения звука вдоль луча. Лучи достигают антенны не одновременно, а с некоторой задержкой по времени, равной разности между временами распространения звука вдоль отдельных лучей. Если источник и приемник связаны между собой одним лучом, то количество задержек будет равно нулю. Если лучей два, то между ними будет всего одна задержка. Если лучей три, то естественно получим три задержки по одной для каждой пары лучей: между первым и вторым, между первым и третьим, между вторым и третьим. С использованием известных формул комбинаторики [Виленкин Н.Я. Комбинаторика. - М.: Наука. - 1969] можно показать, что, в общем случае, количество задержек М определяется количеством лучей n следующим образом:
 .
.
Примеры численных значений количества задержек в зависимости от количества лучей приведены в таблице 1. Видно, что количество задержек не может быть любым числом, а принадлежит некоторому фиксированному ряду натуральных чисел. Следовательно, если измеренное в шумовом процессе количество задержек не принадлежит указанному ряду М теоретически возможного количества задержек, то сразу понятно, что наблюдаемый процесс принадлежит более, чем одной цели.

Новые процедуры способа, используя указанное соотношение, позволяют автоматически сравнивать измеренное в шумовом процессе количество задержек с теоретически возможным количеством задержек для одиночного объекта, то есть определять, содержит ли принятый шумовой процесс смесь сигналов нескольких объектов.
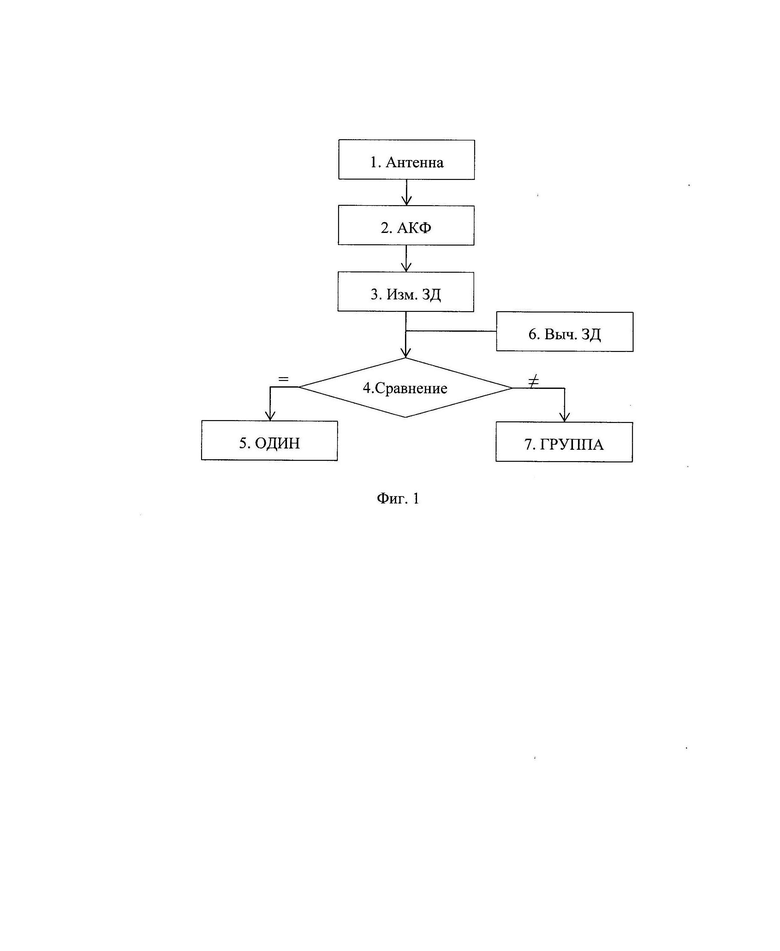
Сущность изобретения поясняется фиг.1, на которой изображена укрупненная блок-схема устройства, реализующего предлагаемый способ. Структурная схема включает последовательно соединенные блоки: Антенна 1, блок 2 определения автокорреляционной функции сигнала (АКФ), блок 3 измерения количества задержек по времени в принятом шумовом процессе (Изм. ЗД), блок 4 сравнения измеренного количества задержек с рядом теоретически возможных количеств задержек (Сравнение), блок 5 принятия решения о наблюдении одиночного объекта (ОДИН). Выход блока 6 определения ряда теоретически возможных количеств задержек для одиночного объекта (Выч. ЗД) соединен со вторым входом блока 4, второй выход которого соединен с входом блока 7 принятия решения наблюдении группы объектов (ГРУППА).
С помощью аппаратуры (фиг.1) способ реализуется следующим образом.
Предварительно в блоке 6 определяют для одиночного объекта ряд  теоретически возможных количеств задержек по времени между приходом сигнала по различным лучам. Для этого используют формулу
теоретически возможных количеств задержек по времени между приходом сигнала по различным лучам. Для этого используют формулу  - ряд количества лучей, по которым может распространяться сигнал, представляющий собой ряд натуральных чисел от одного до N. При этом, в большинстве практических случаев можно ограничиться рассмотрением количества членов ряда N=10, поскольку при количестве лучей более 10, они будут обладать малой интенсивностью, и не будут обнаруживаться в принятом сигнале [Авилов К.В., Добряков Н.А., Попов О.Е. Комплекс программных средств для вычисления звуковых полей в морской среде, неоднородной по глубине и трассе распространения // Акустика океана. Доклады X школы-семинара акад. Л.М. Бреховских. - М.: ГЕОС.- 2004]. Ряд возможных количеств задержек передается в блок 3.
- ряд количества лучей, по которым может распространяться сигнал, представляющий собой ряд натуральных чисел от одного до N. При этом, в большинстве практических случаев можно ограничиться рассмотрением количества членов ряда N=10, поскольку при количестве лучей более 10, они будут обладать малой интенсивностью, и не будут обнаруживаться в принятом сигнале [Авилов К.В., Добряков Н.А., Попов О.Е. Комплекс программных средств для вычисления звуковых полей в морской среде, неоднородной по глубине и трассе распространения // Акустика океана. Доклады X школы-семинара акад. Л.М. Бреховских. - М.: ГЕОС.- 2004]. Ряд возможных количеств задержек передается в блок 3.
Антенна 1 принимает шумовой процесс с фиксированного горизонтального направления. При этом шумовой процесс может содержать в своем составе смесь сигналов нескольких морских объектов, находящихся на разных дистанциях и(или) глубинах погружения. Устройство антенны и процедуры приема шумового процесса известны, например, из [Справочник по гидроакустике / АП Евтютов, АЕ Колесников, ЕА Корепин и др. - 2-е изд., перераб. и доп. - Л.: Судостроение. - 1988. - 552 с]. Шумовой процесс поступает в блок 2.
В блоке 2 определяют автокорреляционную функцию сигнала. Формирование автокорреляционной функции является стандартной процедурой, известной. из [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. Пер.с англ. М.: Мир. - 1978], которая может быть выполнена либо в частотной области через определение спектра сигнала, как предлагается в способе-прототипе, либо выполнена во временной области прямым алгоритмом.
В блоке 3 осуществляется измерение количества задержек по времени в принятом шумовом процессе. Для этого находят в автокорреляционной функции совокупность локальных максимумов, и определяют их количество. Количество локальных максимумов автокорреляционной функции сигнала и является количеством задержек по времени в принятом шумовом процессе. Измерения самих значений задержек не требуется. Обнаружение локальных максимумов может быть реализовано на основании алгоритма обнаружения аномальных выбросов случайного процесса [Тейлор Дж. Введение в теорию ошибок. Пер. с англ. М.: Мир. - 1985]. Измеренное количество задержек передается в блок 4.
В блоке 4 сравнивают измеренное количество задержек с каждым членом ряда теоретически возможных количеств задержек. Если измеренное количество задержек совпадает с одним из членов ряда возможных количеств задержек, то в блок 5 передается признак о наблюдении одиночного объекта. Если измеренное количество задержек не совпадает ни с одним из членов ряда возможных количеств задержек, то в блок 7 передается признак о наблюдении группы объектов.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ распознавания гидроакустических шумов морских объектов, предназначенный для распознавания шумов в том случае, когда в одном направлении могут присутствовать несколько источников шума, неразделяемых по углу наблюдения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат морской шумящей цели | 2022 |
|
RU2798416C1 |
| Способ определения класса объекта, обнаруженного шумопеленгаторной станцией | 2023 |
|
RU2835874C1 |
| Способ определения полной совокупности координат морского шумящего объекта | 2023 |
|
RU2817558C1 |
| Способ определения координат шумящих объектов с использованием вертикально развитых бортовых антенн гидроакустических комплексов | 2023 |
|
RU2820807C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
| Способ получения информации о подводном шумящем объекте | 2022 |
|
RU2803528C1 |
| Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной | 2024 |
|
RU2838637C1 |
| Способ пассивного определения координат шумящего объекта | 2022 |
|
RU2798390C1 |
| СПОСОБ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2013 |
|
RU2559310C2 |
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
Изобретение относится к области гидроакустики и может быть использовано при решении задач обработки шумового сигнала в гидроакустических системах, предназначено для распознавания шумов в том случае, когда в одном направлении могут присутствовать несколько источников шума, неразделяемых по углу наблюдения. Техническим результатом является возможность автоматического и объективного распознавания наличия в принятом шумовом процессе сигнала одиночного объекта или смеси сигналов нескольких объектов. Заявленный способ основан на приеме шумового процесса гидроакустической антенной и измерении параметров шумового процесса. При реализации способа осуществляют анализ измеренного количества задержек по времени между приходом сигнала по различным лучам, на основании чего принимают решение о наблюдении одиночного объекта или группы объектов. 1 ил., 1 табл.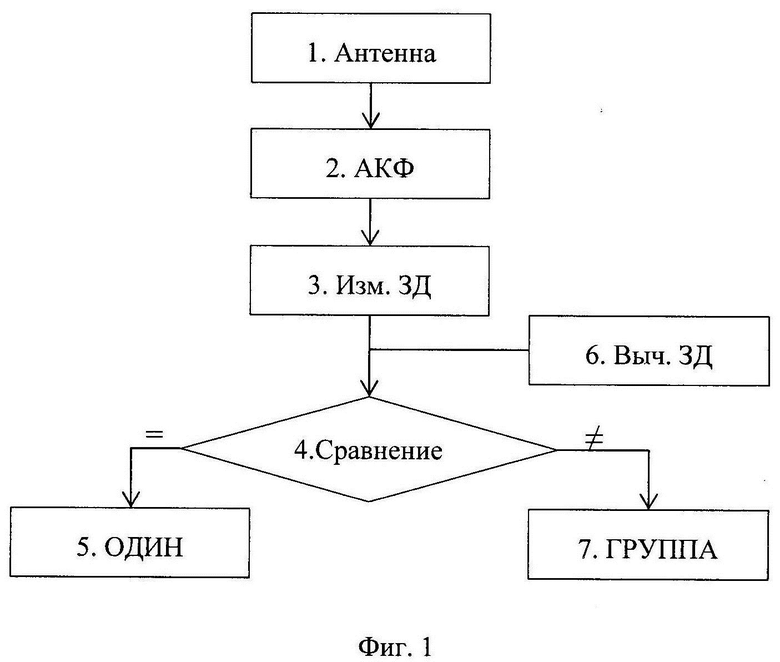
Способ распознавания гидроакустических шумов морских объектов, в котором принимают шумовой процесс гидроакустический антенной, сфокусированной в горизонтальном направлении, определяют автокорреляционную функцию шумового процесса, анализируют автокорреляционную функцию, и принимают решение о наблюдении одиночного объекта или решение о наблюдении группы объектов, отличающийся тем, что определяют ряд теоретически возможных количеств задержек по времени Mi между приходом сигнала по различным лучам для одиночного объекта Mi = ni(ni - 1)/2, где ni = 1, 2, …N - ряд количества лучей, по которым может распространяться сигнал, при анализе автокорреляционной функции измеряют количество задержек по времени в принятом сигнале, сравнивают измеренное количество задержек с каждым членом ряда возможных количеств задержек, в случае совпадения измеренного количества задержек с одним из членов ряда возможных количеств задержек принимают решение о наблюдении одиночного объекта, в противном случае принимают решение о наблюдении группы объектов.
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2014 |
|
RU2570430C1 |
| Способ классификации морских объектов по уровню шума в источнике | 2021 |
|
RU2767001C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681432C1 |
| СПОСОБ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2013 |
|
RU2559310C2 |
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2003 |
|
RU2262121C2 |
| WO 2008135289 A2, 13.11.2008 | |||
| EP 1542032 A1, 15.06.2005 | |||
| US 2003223311 A1, 04.12.2003. | |||

