Настоящее изобретение относится к области систем трансмиссии для автотранспортных средств и, в частности, к области управления системами трансмиссии автотранспортных средств.
Как известно, системы трансмиссии для автотранспортных средств содержат трансмиссии с двумя ведущими колесами для большинства транспортных средств и трансмиссии с четырьмя ведущими колесами для внедорожников.
Кроме характеристик, свойственных этим различным транспортным средствам, транспортные средства с четырьмя ведущими колесами отличаются повышенным расходом топлива и плохими характеристиками езды на шоссе.
В течение последних нескольких лет новые транспортные средства с полным приводом поколебали эту устоявшуюся репутацию. Эти транспортные средства характеризуются передачей переменного крутящего момента между передним ведущим мостом и задним ведущим мостом.
Точный контроль этого типа трансмиссии позволяет совместить характеристики движения и безопасности как на шоссе, так и по бездорожью.
В документе US 5752211 описан способ управления, который позволяет, улучшить расход топлива за счет определения значения смещения. Это определение смещения изменяется как куб скорости, и его вычитают из команды распределения крутящего момента. Этот способ управления позволяет улучшить отклонение между скоростью переднего моста и скоростью заднего моста во время фаз квазистатического качения.
В документе ЕР 1188597 описан способ распределения крутящего момента между передним и задним мостами в зависимости от обнаружения изменения диаметра шин вследствие износа или замены.
В документе ЕР 1275549 описан способ распределения крутящего момента между передним и задним мостами в зависимости от различных сигналов, таких как скорость вращения колес и положение педали акселератора. Этот способ улучшает характеристики транспортного средства за счет улучшения отношения между скоростью переднего моста и скоростью заднего моста, но не раскрывает метода определения заданного значения.
В документе JP 10119598 описан способ управления, применяемый для транспортного средства с четырьмя ведущими колесами, главные ведущие колеса которого установлены на заднем мосту. Система выполнена с возможностью передачи части крутящего момента от задних ведущих колес на передний мост. Эту передачу активируют, когда задние ведущие колеса начинают пробуксовывать.
В документе US 5247443 описан способ распределения крутящего момента между передним и задним мостами в зависимости от разности между скоростями вращения переднего и заднего мостов. Способ изменяет также порог обнаружения буксования, если происходит торможение. Этот способ улучшает характеристики транспортного средства за счет оптимизации буксования, но не учитывает интенсивности торможения при определении распределения момента.
В документе ЕР 1627763 описан способ, учитывающий торможение при распределении крутящего момента между передним и задним мостами.
Когда передача крутящего момента является активной и срабатывает антиблокировка колес, можно оказаться в ситуации, когда внедорожный режим (привод на четыре ведущих колеса) отключается без ведома водителя. Такая ситуация ухудшает комфортность вождения и может оказаться опасной. Хотя в известных источниках описаны устройства управления системой передачи крутящего момента, ни в одном из них не раскрыто устройство управления, учитывающее условия работы системы антиблокировки колес во время торможения (ABS) и системы передачи крутящего момента (ETC). Следовательно, такие системы не способны справиться с вышеуказанной ситуацией.
Существует потребность в учете активации системы антиблокировки колес во время торможения (ABS) и системы передачи крутящего момента (ETC) при определении передачи крутящего момента.
Настоящее изобретение относится к способу управления приводом передачи крутящего момента, который может учитывать условия работы системы антиблокировки колес во время торможения и системы передачи крутящего момента.
Настоящее изобретение относится к системе управления приводом передачи крутящего момента, выполненной с возможностью учета условий работы системы антиблокировки колес во время торможения и системы передачи крутящего момента.
Согласно варианту выполнения, система управления приводом передачи крутящего момента для автотранспортного средства с четырьмя ведущими колесами содержит средства определения и систему антиблокировки колес. Система управления содержит средство управления антиблокировкой колес и средство управления приводом передачи крутящего момента, выполненные с возможностью взаимодействия с целью подачи команды на передачу крутящего момента, предназначенной для привода передачи крутящего момента.
Средство управления антиблокировкой колес может быть выполнено с возможностью определения команды антиблокировки колес в зависимости от команды передачи крутящего момента, поступившей от средства управления приводом передачи крутящего момента, при этом средство управления приводом передачи крутящего момента может быть выполнено с возможностью определения команды передачи крутящего момента в зависимости от команды антиблокировки колес.
Система управления обеспечивает взаимодействие между антиблокировкой колес и передачей крутящего момента, что позволяет выработать заданное значение передачи крутящего момента, которое не может быть определено ошибочно по причине неоправданного срабатывания антиблокировки колес.
Система управления может содержать орган ручного управления, связанный со средством управления приводом передачи крутящего момента, и орган ручного управления может занимать несколько положений, может управляться водителем транспортного средства и может быть выполнен с возможностью подачи сигнала в зависимости от положения, выбранного водителем.
Система управления может содержать средство определения ситуации вождения, выполненное с возможностью подачи командного сигнала в направлении управляемого переключателя в зависимости от сигналов, поступивших от средств определения, и от команды передачи, поступившей от средства управления приводом передачи крутящего момента, и может содержать управляемый переключатель, выполненный с возможностью подачи сигнала обнаружения блокировки колес.
Система управления может содержать первое средство обнаружения блокировки колес и второе средство обнаружения блокировки колес, каждое из которых соединено с контактом управляемого переключателя и каждое из которых выполнено с возможностью определения блокировки колес во время торможения в зависимости от сигналов скорости вращения каждого колеса, поступающих от средств определения.
Система управления может содержать средство оценки уровня торможения, выполненное с возможностью подачи сигнала в зависимости от сигнала давления в тормозном контуре, поступающего от средств определения, логический оператор типа И, выполненный с возможностью подачи команды антиблокировки колес, связанной с состоянием работы средства управления антиблокировкой колес, в зависимости от сигналов, поступивших от управляемого переключателя и от средства оценки уровня торможения.
Система управления может содержать средство определения активности системы антиблокировки колес, выполненное с возможностью определения командного сигнала включения системы антиблокировки колесом в зависимости от сигналов, поступающих от средств определения, и от команды антиблокировки колес, поступающей от средства управления антиблокировкой колес.
Система управления может содержать средство управления режимом вождения, выполненное с возможностью определения режима вождения, применяемого к приводу передачи крутящего момента, в зависимости от сигналов, поступающих от средств определения и от командного сигнала включения системы антиблокировки колес, поступившего от средств определения активности системы антиблокировки колес, при этом средство управления режимом вождения выполнено с возможностью подачи командного сигнала управления режимом.
Система управления может содержать средство определения заданных значений крутящего момента и средство переключения, при этом средство определения заданных значений крутящего момента выполнено с возможностью определения заданных значений крутящего момента, применяемых к приводу передачи крутящего момента для каждого режима вождения, который может выбрать водитель, а также для режима торможения, при этом средство переключения выполнено с возможностью подачи команды на передачу крутящего момента, предназначенной для привода передачи крутящего момента, в зависимости от командного сигнала управления режимом, поступившего от средства управления режимом вождения, и от сигналов, поступивших от средства определения заданных значений крутящего момента.
Согласно другому варианту выполнения, способ управления передачей крутящего момента для транспортного средства с четырьмя ведущими колесами с управлением антиблокировкой колес и с управлением передачей крутящего момента содержит этапы, на которых команда антиблокировки колес зависит от команды передачи крутящего момента и команда передачи крутящего момента зависит от команды антиблокировки колес.
Команда антиблокировки колес может зависеть от команды передачи крутящего момента, в частности от запроса режима вождения водителем, от состояния системы передачи крутящего момента и от активного режима вождения в системе передачи крутящего момента.
Сигнал обнаружения блокировки колес можно определить в зависимости по меньшей мере от двух режимов обнаружения блокировки колес и в зависимости от скорости транспортного средства и от команды передачи крутящего момента, в частности от запроса режима вождения водителем, от состояния системы передачи крутящего момента и от активного режима вождения в системе передачи крутящего момента.
Можно выбрать первый режим обнаружения блокировки колес, если запрошенный водителем режим вождения не является внедорожным, или если активный режим вождения в системе передачи крутящего момента не является внедорожным, или если скорость транспортного средства превышает пороговое значение, или если обнаруживают нарушение в работе привода передачи крутящего момента, отличное от теплового нарушения.
Можно выбрать второй режим обнаружения блокировки колес, если первый режим обнаружения блокировки колес не был активирован, при этом второй режим обнаружения блокировки колес характеризуется меньшей чувствительностью обнаружения, чем чувствительность первого режима обнаружения блокировки колес.
Можно определить сигнал обнаружения торможения, если давление в системе торможения превышает пороговое значение,
можно определить команду антиблокировки колес в зависимости от сигнала обнаружения блокировки колес и от сигнала обнаружения торможения, и
можно определить командный сигнал включения системы антиблокировки колес в зависимости от скорости транспортного средства, от команды антиблокировки колес, от запроса режима вождения водителем и от сигнала запроса торможения.
Можно определить заданное значение передачи крутящего момента в режиме с двумя ведущими колесами, заданное значение передачи крутящего момента в режиме с четырьмя ведущими колесами, заданное значение передачи крутящего момента во внедорожном режиме с четырьмя ведущими колесами и заданное значение передачи крутящего момента в режиме торможения,
можно выбрать заданное значение передачи крутящего момента в зависимости от скорости транспортного средства, от запроса режима вождения водителем, от нажатия педали тормоза, от активации ручного тормоза и от командного сигнала включения системы антиблокировки колес, и
можно подать команду передачи крутящего момента в зависимости от выбранного заданного значения передачи крутящего момента.
Изобретение поясняется чертежами, на которых представлено следующее:
фиг.1 - основные элементы системы управления приводом передачи крутящего момента;
фиг.2 - основные элементы средства управления антиблокировкой колес во время торможения;
фиг.3 - основные элементы средства управления приводом передачи крутящего момента.
На фиг.1 показана электронная система управления, которой оборудовано не показанное транспортное средство с четырьмя ведущими колесами. Показанная система управления содержит средства 1 определения, средство 2 управления антиблокировкой колес, средство 3 управления приводом передачи крутящего момента, орган 4 ручного управления и привод 5 передачи крутящего момента.
Средства 1 определения соединены со средством 2 управления антиблокировкой колес транспортного средства через линию 6 соединения и со средством 3 управления приводом передачи крутящего момента через линию 7.
Средства 1 определения могут содержать физические датчики или вычислительные средства, выполненные с возможностью определения требуемых величин на основании модели и данных, поступающих от других датчиков.
Средство 2 управления антиблокировкой колес соединено на выходе со средством 3 управления приводом передачи крутящего момента через линии 8-12 и на входе через линию 13.
Орган 4 ручного управления соединен на выходе со средством 3 управления приводом передачи крутящего момента через линию 14. Привод 5 передачи крутящего момента соединен на входе со средством 3 управления приводом передачи крутящего момента через линию 15.
Средство 3 управления приводом передачи крутящего момента взаимодействует со средством 2 управления антиблокировкой колес, чтобы определять команду передачи крутящего момента для привода 5 передачи крутящего момента. Привод 5 передачи крутящего момента обеспечивает передачу на заднюю ось транспортного средства всей или части крутящего момента, подаваемого на переднюю ось тяговым двигателем, например двигателем внутреннего сгорания, электрическим двигателем или гибридным двигателем. Можно активировать несколько режимов передачи. Режим с двумя ведущими колесами (2WD) отключает передачу крутящего момента от передней оси на заднюю ось. Ведущими остаются только два передних колеса (в случае транспортного средства с передним приводом).
Внедорожный режим с четырьмя ведущими колесами (4WDLock) включает в себя передачу крутящего момента от передней оси на заднюю ось таким образом, чтобы на переднюю ось и на заднюю ось действовал крутящий момент одинакового значения.
Наконец, режим с четырьмя ведущими колесами (4WD) содержит передачу части крутящего момента от передней оси на заднюю ось. Часть крутящего момента, передаваемая на заднюю ось, может быть фиксированной или переменной и, как правило, меньше крутящего момента, передаваемого во внедорожном режиме с четырьмя ведущими колесами (4WDLock).
Средства 1 определения передают, в частности, для средства 2 управления антиблокировкой колес и для средства 3 управления приводом передачи крутящего момента сигналы, в частности сигналы нажатия педали сцепления, включения передаточного отношения, нажатия педали акселератора, скорости v транспортного средства, скорости FRspeed правого переднего колеса транспортного средства, скорости FLspeed левого переднего колеса транспортного средства, скорости RRspeed правого заднего колеса транспортного средства, скорости RLspeed левого заднего колеса транспортного средства и давления P__brk в тормозном контуре.
Средство 2 управления антиблокировкой колес направляет в средство 3 управления приводом передачи крутящего момента команду антиблокировки колес ABS_in_regulation.
Средство 3 управления приводом передачи крутящего момента направляет в средство 2 управления антиблокировкой колес команду передачи крутящего момента, содержащую по меньшей мере один сигнал Driver_req, касающийся режима привода, запрошенного водителем, сигнал ETC_mode, касающийся активного режима передачи крутящего момента, сигнал ETC_state, касающийся состояния привода, и сигнал, касающийся заданного значения передачи крутящего момента.
Сигнал ETC_state, связанный с состоянием работы привода передачи крутящего момента, может принимать несколько значений, в частности значение «нормальное», значение «предупреждение о повышенной температуре», значение «неисправность, связанная с перегревом» и значение «другая неисправность».
Сигнал Driver_req, связанный с режимом привода, запрошенным водителем, и сигнал ETC_mode, связанный с активным режимом передачи крутящего момента, могут принимать несколько значений, в частности значение «с двумя ведущими колесами» (2WD), значение «нормальный с четырьмя ведущими колесами» (4WD) и значение «внедорожный с четырьмя ведущими колесами» (4WDLock).
Можно также передавать и другие сигналы, например сигнал оценки передаваемого крутящего момента или сигнал измерения передаваемого крутящего момента. Кроме того, сигналы, проходящие между несколькими элементами устройства управления, могут передаваться по индивидуальным линиям проводной связи, могут быть уплотнены в виде групп или могут переноситься шиной данных. Эти способы соединения представлены в качестве не ограничительных примеров.
Орган 4 ручного управления, который может приводиться в действие непосредственно водителем, передает в направлении средства 3 управления приводом передачи крутящего момента по меньшей мере один сигнал, касающийся выбора режима привода водителем. Режимы привода, которые могут быть выбраны, включают в себя, в частности, режим с двумя ведущими колесами (2WD), режим с четырьмя ведущими колесами (4WD) и внедорожный режим с четырьмя ведущими колесами (4WDLock).
Внедорожный режим с четырьмя ведущими колесами (4WDLock) отличается от режима с четырьмя ведущими колесами (4WD) тем, что водитель выбирает его, чтобы обозначить свое намерение использовать транспортное средство во внедорожном режиме для преодоления препятствий или для прохождения пересеченного участка. Это предполагает, что блокировка колес может происходить без проявления какой-либо аномалии в качении.
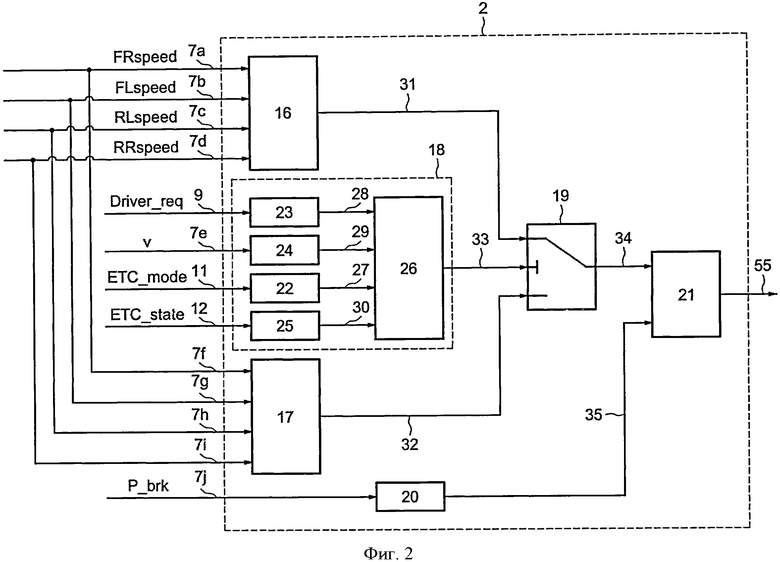
На фиг.2 показаны элементы, включенные в состав средства 2 управления антиблокировкой колес.
Средство 2 управления антиблокировкой колес содержит первое средство 16 обнаружения блокировки колес, второе средство 17 обнаружения блокировки колес, средство 18 определения ситуации вождения, управляемый переключатель 19, средство 20 оценки уровня торможения и логический оператор 21 типа И.
Первое средство 16 обнаружения блокировки колес принимает на входе сигналы скорости FRspeed правого переднего колеса транспортного средства, скорости FLspeed левого переднего колеса транспортного средства, скорости RLspeed левого заднего колеса транспортного средства и скорости RRspeed правого заднего колеса транспортного средства от средств 1 определения через линии соединения 7а, 7b, 7с и 7d.
Второе средство 17 обнаружения блокировки колес принимает тоже на входе сигналы скорости FRspeed правого переднего колеса транспортного средства, скорости FLspeed левого переднего колеса транспортного средства, скорости RLspeed левого заднего колеса транспортного средства и скорости RRspeed правого заднего колеса транспортного средства от средств 1 определения через линии соединения 7f, 7g, 7h и 7i.
Средство 18 определения ситуации вождения принимает на входе сигнал скорости v транспортного средства от средств 1 определения через линию 7е и, кроме того, принимает от средства 3 управления приводом передачи крутящего момента команду передачи крутящего момента, содержащую сигнал Driver_req, связанный с режимом привода, запрошенным водителем, через линию 9, сигнал ETC_mode, связанный с активным режимом передачи крутящего момента, через линию 11, и сигнал ETC_state, связанный с состоянием привода передачи крутящего момента, через линию 12.
Первое средство 16 обнаружения блокировки колес и второе средство 17 обнаружения блокировки колес соединены со входом управляемого переключателя 19 через линии 31 и 32 соответственно. Управляемый переключатель 19 соединен своим управляющим контактом со средством 18 определения ситуации вождения через линию 33.
В свою очередь, средство 18 определения ситуации вождения содержит средство 22 определения активного режима вождения, средство 23 определения режима вождения, запрошенного водителем, средство 24 сравнения скорости транспортного средства с пороговой скоростью, средство 25 определения неисправности привода передачи крутящего момента и логический оператор 26 типа ИЛИ. Средство 22 определения активного режима, средство 23 определения режима вождения, запрошенного водителем, средство 24 сравнения скорости транспортного средства с пороговой скоростью и средство 25 определения неисправности привода передачи крутящего момента соединены с логическим оператором 26 типа ИЛИ через линии связи 27, 28, 29 и 30 соответственно. Логический оператор 26 типа ИЛИ имеет общий выход со средством 18 определения ситуации вождения.
Выход управляемого переключателя 19 соединен со входом логического оператора 21 типа И через линию 34.
Средство 20 оценки уровня торможения принимает на входе сигнал давления P_brk в системе торможения через линию 7j от средства 1 определения. Кроме того, средство 20 оценки уровня торможения соединено на выходе с логическим оператором 21 типа И через линию 35. Логический оператор 21 типа И имеет общий выход со средством 2 управления антиблокировкой колес.
Первое средство 16 обнаружения блокировки колес выполнено с возможностью обнаружения блокировки колес, когда транспортное средство не находится во внедорожном режиме. Что же касается второго средства 17 обнаружения блокировки колес, то оно выполнено с возможностью обнаружения блокировки колес, когда транспортное средство движется во внедорожном режиме. Среди описанных выше режимов вождения режим с двумя ведущими колесами (2WD) и режим с четырьмя ведущими колесами (4WD) не являются внедорожными режимами, тогда как внедорожный режим с четырьмя ведущими колесами (4WDLock) является внедорожным режимом. Первое средство 16 обнаружения блокировки колес и второе средство 17 обнаружения блокировки колес различаются менее строгими условиями активации для второго средства 17 обнаружения.
Первое средство 16 обнаружения блокировки колес и второе средство 17 обнаружения блокировки колес являются активными параллельно. Средство 19 определения ситуации вождения может определять, какое условие активации системы антиблокировки колес следует применить в соответствии с условиями активации первого средства 16 обнаружения и второго средства 17 обнаружения.
Средство 22 определения активного режима вождения сравнивает значение сигнала ETC_mode, полученного от средства 3 управления приводом передачи крутящего момента, с записанным в памяти характеристическим значением работы во внедорожном режиме с четырьмя ведущими колесами (4WDLock). Если оба значения являются одинаковыми, средство 22 определения активного режима вождения выдает на выходе логическое значение «неверно», в противном случае выдается значение «верно».
Средство 23 определения запрошенного водителем режима вождения сравнивает значение сигнала Driver_req, полученного от средства 3 управления приводом передачи крутящего момента, с сохраненным в памяти характеристическим значением работы во внедорожном режиме с четырьмя ведущими колесами (4WDLock). Если оба значения являются одинаковыми, средство 23 определения запрошенного водителем режима вождения выдает на выходе логическое значение «неверно», в противном случае выдается значение «верно».
Средство 24 сравнения сравнивает значение сигнала v, полученного от средств 1 определения, с записанной в памяти пороговой скоростью и выдает на выходе значение «верно», если значение v превышает записанную в памяти пороговую скорость, в противном случае оно выдает логическое значение «неверно».
Средство 25 определения неисправности привода передачи крутящего момента сравнивает значение сигнала ETC_state, принятого от средства 3 управления приводом передачи крутящего момента, с сохраненным в памяти характеристическим значением обнаруженной неисправности, отличной от неисправности, связанной с перегревом. Средство 25 определения неисправности привода передачи крутящего момента выдает на выходе логическое значение «верно», если значение ETC_state равно записанному в памяти значению, в противном случае оно выдает логическое значение «неверно».
Логические значения, выдаваемые на выходе средства 22 определения активного режима вождения, средства 23 определения режима вождения, запрошенного водителем, средства 24 сравнения скорости транспортного средства с пороговой скоростью и средства 25 определения неисправности привода передачи крутящего момента соединены своими выходами с логическим оператором 26 типа ИЛИ, который выдает логический сигнал «верно», если по меньшей мере одно из значений, принятых на его входах, является логическим значением «верно».
Управляемый переключатель 19 выдает на выходе сигнал обнаружения блокировки колес. Сигнал обнаружения блокировки колес равен логическому сигналу, принятому от первого средства 16 определения, если командный сигнал, принятый от средства 18 определения, имеет логическое значение «верно», в противном случае сигнал обнаружения блокировки колес равен логическому сигналу, принятому от второго средства 17 определения.
Средство 20 оценки уровня торможения сравнивает значение сигнала P_brk, принятого от средств 1 определения, с записанным в памяти пороговым значением Pseuil и выдает на выходе логическое значение «верно», если значение P_brk превышает или равно значению Pseuil, в противном случае оно выдает логическое значение «неверно».
Логический оператора 21 типа И выдает на выходе логическое значение «верно», если оба сигнала, поступившие соответственно от управляемого переключателя 19 и от средства 20 оценки уровня торможения, имеют логическое значение «верно», в противном случае выдается сигнал с логическим значением «неверно».
Поскольку выход 55 логического оператора 21 типа И совпадает с выходом средства 2 управления, то сигнал, выдаваемый логическим оператором 21 типа И, является также сигналом, выдаваемым средством 2 управления. Этот сигнал соответствует команде антиблокировки колес ABS_in_regulation.
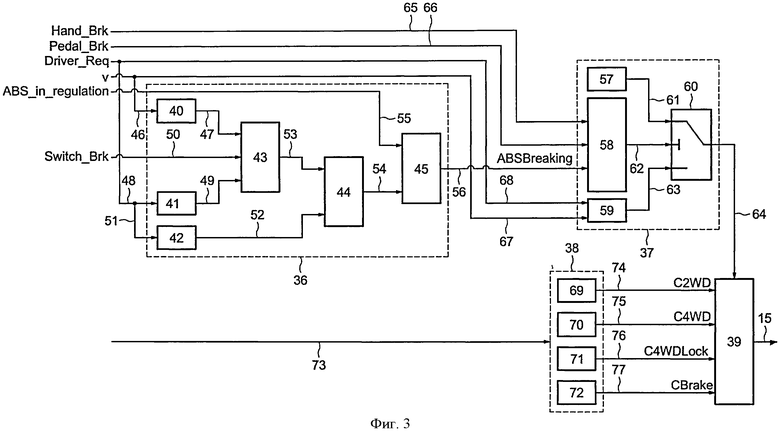
На фиг.3 показаны основные элементы, входящие в состав средства 3 управления приводом передачи крутящего момента, в том числе средство 36 определения активности системы антиблокировки колес, средство 37 управления режимом вождения, средство 38 определения заданных значений крутящего момента и управляемое средство 39 переключения. Другие не показанные средства позволяют определять сигнал Driver-req, связанный с режимом привода, запрошенным водителем, сигнал ETC_mode, связанный с активным режимом передачи крутящего момента, и сигнал ETC_state, связанный с состоянием привода передачи крутящего момента.
Средство 36 определения активности системы антиблокировки колес содержит средство 40 сравнения скорости транспортного средства с пороговой скоростью, первое средство 41 сравнения запроса режима вождения водителем и второе средство 42 сравнения запроса режима вождения водителем, логический оператор 43 типа И, логический оператор 44 типа ИЛИ и логический оператор 45 типа И.
Средство 40 сравнения скорости транспортного средства с пороговой скоростью связано на входе со средством 1 определения через линию 46 и на выходе с логическим оператором 43 типа И через линию 47.
Первое средство 41 сравнения запроса режима вождения водителем соединено на входе с органом 4 ручного управления через линию 48 и на выходе с логическим оператором 43 типа И через линию 49.
Логический оператор 43 типа И соединен на входе со средствами 1 определения через линию 50, передающую сигнал запроса торможения Switch_brk, и на выходе - с логическим оператором 44 типа ИЛИ через линию 53.
Второе средство 42 сравнения запроса режима вождения водителем соединено на входе с органом 4 ручного управления через линию 51, передающую сигнал Driver_req, связанный с режимом привода, запрошенным водителем, и на выходе - с логическим оператором 44 типа ИЛИ через линию 52.
Логический оператор 44 типа ИЛИ соединен на выходе через линию 54 с логическим оператором 45 типа И.
Логический оператор 45 типа И соединен также на входе со средством 2 управления антиблокировкой колес через линию 55. Логический оператор 45 типа И принимает команду антиблокировки колес ABS_in_regulation через линию 55.
Выход логического оператора 45 типа И совпадает с выходом средства 36 определения активности системы антиблокировки колес и соединен со средством 37 управления режимом вождения через линию 56.
Средство 36 определения активности системы антиблокировки колес получает через линию 46 значение v скорости транспортного средства. Средство 40 сравнения скорости сравнивает это значение с сохраненным в памяти значением Vseuil. На выходе выдается логическое значение «верно», если значение скорости v превышает или равно значению Vseuil, в противном случае выдается логическое значение «неверно».
Средство 36 определения активности системы антиблокировки колес получает через линию 50 от средств 1 определения логическое значение, которое является значением «верно», если нажата педаль тормоза.
Значение Driver_req поступает через линию 48 от средства 3 управления приводом передачи крутящего момента. Первое средство 41 сравнения запроса режима вождения от водителя сравнивает значение Driver_req с сохраненным в памяти значением 4WDLock. Если сравнение подтверждается, первое средство 41 сравнения выдает на выходе логическое значение «верно», в противном случае оно выдает логическое значение «неверно».
Точно также, второе средство 42 сравнения запроса режима вождения от водителя сравнивает значение Driver_req с сохраненным в памяти значением 4WDLock. Если сравнение подтверждается, второе средство 42 сравнения выдает на выходе логическое значение «неверно», в противном случае оно выдает логическое значение «верно».
Сигнал запроса торможения Switch_Brk, поступающий по линии 50 от средств определения, является логическим сигналом. Сигнал Switch_Brk принимает логическое значение «верно», если торможение не затребовано или если датчик обнаружения торможения неисправен. Сигнал Switch_Brk принимает логическое значение «верно», если обнаружено торможение, причем при любой амплитуде затребованного торможения.
Логический оператор 43 типа И принимает на входе логические сигналы, выдаваемые средством 40 сравнения скорости и первым средством 41 сравнения запроса режима вождения от водителя, и сигнал, передаваемый через линию 50. Если все эти сигналы имеют логическое значение «верно», логический оператор 43 типа И выдает на выходе логическое значение «верно», в противном случае он выдает логическое значение «неверно».
Логический оператор 44 типа ИЛИ принимает на входе логические сигналы, направляемые логическим оператором 43 типа И и вторым средством 42 сравнения запроса режима вождения от водителя. Если по меньшей мере один из этих сигналов имеет логическое значение «верно», логический оператор 44 типа ИЛИ выдает на выходе логическое значение «верно», в противном случае он выдает логическое значение «неверно».
Средство 36 определения активности системы антиблокировки колес принимает через линию 55 команду антиблокировки колес ABS_in_regulation, поступающую от средства 2 управления антиблокировкой колес.
Логический оператор 45 типа И принимает на входе логический сигнал, выдаваемый логическим оператором 44 типа ИЛИ, и команду антиблокировки колес ABS_in_regulation. Если все эти сигналы имеют логическое значение «верно», логический оператор 45 типа И выдает на выходе командный сигнал включения системы антиблокировки колес ABSBraking, имеющий логическое значение «верно», в противном случае выдается логическое значение «неверно».
Иначе говоря, определяют, запрашивает или не запрашивает водитель внедорожный режим с четырьмя ведущими колесами (4WDLock). Если запрошен внедорожный режим с четырьмя ведущими колесами (4WDLock), и если скорость транспортного средства превышает или равна пороговой скорости, и если антиблокировка колес активирована, срабатывает система антиблокировки колес (ABS). Во всех других случаях система антиблокировки колес (ABS) не срабатывает. Это относится, в частности, к случаю, когда антиблокировка колес не активирована. Система антиблокировки колес (ABS) срабатывает или не срабатывает по командному сигналу ABSBraking включения системы антиблокировки колес на выходе средства 36 определения активности системы антиблокировки колес. Этот сигнал ABSBraking имеет логическое значение, определенное логическим оператором 45 типа И.
Средство 37 управления режимом вождения содержит память 57, логический оператор 58 типа ИЛИ, средство 59 определения активируемого режима вождения и управляемый переключатель 60.
Управляемый переключатель 60 соединен на входе через линию 61 с памятью 57 и через линию 63 со средством 59 определения активируемого режима вождения. Кроме того, управляемый переключатель 60 соединен на входе своим управляющим контактом с логическим оператором 58 типа ИЛИ через линию 62.
Логический оператор 58 типа ИЛИ соединен на входе со средством 36 определения активности системы антиблокировки колес через линию 56, по которой передается командный сигнал включения ABSBraking системы антиблокировки колес, и со средствами 1 определения через линию 65 и линию 66.
Средство 59 определения активируемого режима вождения соединено на входе со средствами 1 определения через линию 67, являющуюся ответвлением линии 46, и через линию 68, являющуюся ответвлением линии 48.
Управляемый переключатель 60 соединен на выходе с управляемым средством 39 переключения через линию 64.
Логический оператор 58 типа ИЛИ принимает от средств 1 определения логический сигнал Hand_Brk активации ручного тормоза через линию 65 и логический сигнал Pedal_Brk активации нажатия педали тормоза через линию 66. Логический оператор 58 типа ИЛИ выдает на выходе логическое значение «верно», если по меньшей мере один из сигналов на входе имеет логическое значение «верно», в противном случае он выдает логическое значение «неверно».
Память 57 направляет в управляемый переключатель 60 сигнал управления средством 39 переключения, который переключает указанное средство 39 переключения таким образом, чтобы на выходе средство 39 переключения выдавало заданное значение момента торможения.
Средство 59 определения активируемого режима вождения принимает на входе сигнал, содержащий запрос от водителя Driver_req, через линию 68 и скорость v транспортного средства через линию 67 и может принимать другие данные, например наружную температуру. На выходе средство 59 определения активируемого режима вождения выдает командный сигнал в направлении управляемого переключателя 60 для управления средством 39 переключения. Этот командный сигнал, выдаваемый средством определения 59, может привести к переключению указанного средства 39 переключения таким образом, чтобы применить заданное значение момента, соответствующее режиму вождения, определенному средством 59 определения активируемого режима вождения.
Управляемый переключатель 60 передает сигнал, поступивший из памяти 57, в направлении средства 39 переключения, если логический сигнал, принятый на его управляющем контакте от логического оператора 58 типа ИЛИ, имеет логическое значение «верно». Если логический сигнал, принятый на управляющем контакте от логического оператора 58 типа ИЛИ, имеет логическое значение «неверно», то сигнал, поступивший от средства 59 определения активируемого режима вождения, переправляется в направлении средства 39 переключения.
Таким образом, командный сигнал управления режимом, выдаваемый на выходе управляемого переключателя 60, зависит от логического сигнала, поступившего от логического оператора 58 типа ИЛИ.
Средство 38 определения заданных значений момента содержит средство 69 определения заданного значения крутящего момента в режиме с двумя ведущими колесами (2WD), средство 70 определения заданного значения крутящего момента в режиме с четырьмя ведущими колесами (4WD), средство 71 определения заданного значения крутящего момента во внедорожном режиме с четырьмя ведущими колесами (4WDLock) и средство 72 определения заданного значения крутящего момента в режиме торможения. Средство 38 определения заданных значений момента соединено на входе со средствами 1 определения через линию 73.
Управляемое средство 39 переключения соединено на входе со средством 69 определения заданного значения крутящего момента в режиме с двумя ведущими колесами (2WD) через линию 74, со средством 70 определения заданного значения крутящего момента в режиме с четырьмя ведущими колесами (4WD) через линию 75, со средством 71 определения заданного значения крутящего момента во внедорожном режиме с четырьмя ведущими колесами (4WDLock) через линию 76 и со средством 72 определения заданного значения крутящего момента в режиме торможения через линию 77. Управляемое средство 39 переключения соединено также на входе со средством 37 управления режимом вождения через его управляющий контакт.
Управляемое средство 39 переключения соединено на выходе через линию 15 с приводом 5 передачи крутящего момента.
Средство 38 определения заданных значений крутящего момента принимает на своих входах значения, поступающие от средств определения и характеризующие поведение транспортного средства. В зависимости от этих значений средство 69 определения заданного значения крутящего момента в режиме с двумя ведущими колесами (2WD) определяет заданное значение C2WD крутящего момента в режиме с двумя ведущими колесами, средство 70 определения заданного значения крутящего момента в режиме с четырьмя ведущими колесами (4WD) определяет заданное значение C4WD крутящего момента в режиме с четырьмя ведущими колесами, средство 71 определения заданного значения крутящего момента во внедорожном режиме с четырьмя ведущими колесами (4WDLock) определяет заданное значение C4WDLock крутящего момента во внедорожном режиме с четырьмя ведущими колесами, и средство 72 определения заданного значения крутящего момента в режиме торможения определяет заданное значение CBrake крутящего момента в режиме торможения. Специалисту известно определение этих различных заданных значений. Следует учесть, что заданное значение CBrake крутящего момента в режиме торможения может быть постоянной величиной и может быть величиной, зависящей от скорости транспортного средства или от других параметров.
Управляемое средство 39 переключения выдает команду передачи крутящего момента на привод 5 передачи крутящего момента. Команда передачи крутящего момента равна заданному значению крутящего момента, применяемому в зависимости от командного сигнала, выдаваемого средством 59 определения активируемого режима вождения.
Иначе говоря, если обнаружено торможение, заданное значение Cbrake крутящего момента в режиме торможения применяют по командному сигналу, поступившему из памяти 57, в противном случае средство 39 переключения определяет применяемое заданное значение в зависимости от командного сигнала, поступившего от средства 59 определения активируемого режима вождения.
Кроме того, средство 3 управления приводом передачи крутящего момента выполнено с возможностью выдачи логического сигнала деактивации, предназначенного для средства 2 управления антиблокировкой колес. Этот сигнал выдается, когда обнаруживают ситуацию мостового скрещивания, в зависимости от скорости каждого колеса, от крутящего момента двигателя и от крутящего момента, передаваемого на заднюю ось.
Условиями обнаружения ситуации мостового скрещивания являются: сумма скоростей вращения двух колес по диагонали (например, левого переднего колеса и правого заднего колеса) меньше первого порогового значения, сумма скоростей вращения двух других колес превышает второе пороговое значение, и крутящий момент, передаваемый на заднюю ось, превышает третье пороговое значение.
Если все эти три условия проверяются в течение времени, превышающего записанное в памяти время, выдается сигнал деактивации. Выдача сигнала прекращается, как только перестает проверяться одно из этих условий.
Как правило, ситуация мостового скрещивания возникает при преодолении препятствий во внедорожном режиме. Деактивация системы антиблокировки колес во время торможения позволяет избежать колебания логических условий, обрабатываемых средством 3 управления приводом передачи крутящего момента, в частности посредством подачи команды антиблокировки колес ABS_in_regulation от средства 2 управления антиблокировкой колес через линию 55. При этом колебание значения команды антиблокировки колес ABS_in_regulation может привести к колебанию в командном сигнале, принимаемом управляемым переключателем 60, который может навести колебание в команде передачи крутящего момента, направляемой управляемым средством 39 переключения на привод 5 передачи крутящего момента. Такое колебание команды передачи крутящего момента может в лучшем случае доставлять неудобство водителю, а в худшем случае представлять угрозу для безопасности транспортного средства.
Система управления обеспечивает взаимодействие между антиблокировкой колес и передачей крутящего момента, что позволяет вырабатывать заданное значение передачи крутящего момента, которое не может быть определено ошибочно с учетом неоправданного срабатывания антиблокировки колес.
Изобретение относится к системе управления трансмиссией автотранспортного средства. Система управления приводом (5) передачи крутящего момента содержит средства (1) определения и систему антиблокировки колес. Антиблокировочная система содержит средство (2) управления антиблокировкой колес и средство (3) управления приводом передачи крутящего момента, выполненные с возможностью взаимодействия с целью подачи команды на передачу крутящего момента, предназначенной для привода (5) передачи крутящего момента. Средство управления выполнено с возможностью передачи на средство управления антиблокировкой колес сигнала деактивации для отключения системы антиблокировки колес при торможении. Достигается повышение надежности устройства.2 н. и 14 з.п. ф-лы, 3 ил.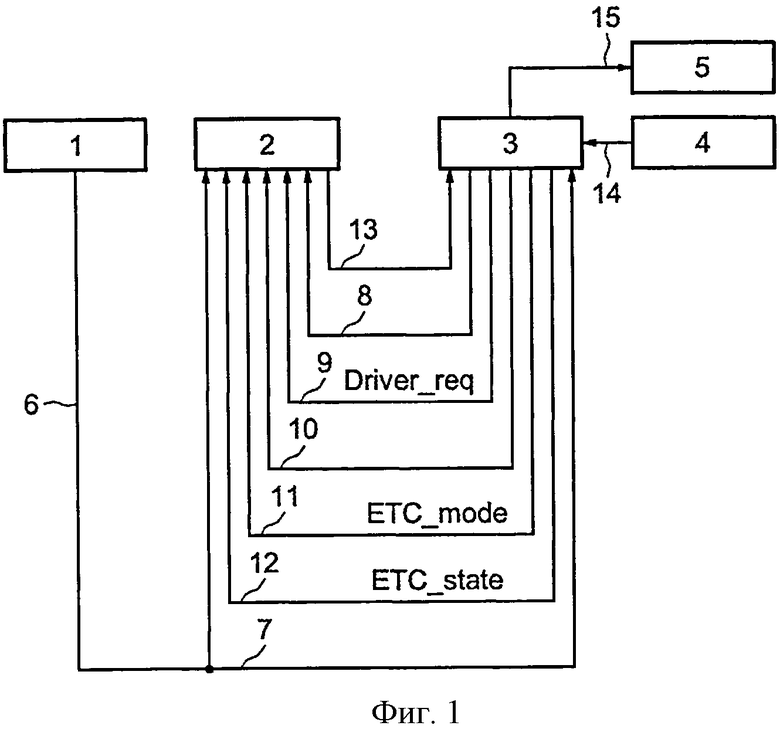
1. Система управления приводом (5) передачи крутящего момента для автотранспортного средства с четырьмя ведущими колесами, содержащая средства (1) определения и систему антиблокировки колес, отличающаяся тем, что содержит средство (2) управления антиблокировкой колес и средство (3) управления приводом передачи крутящего момента, выполненные с возможностью взаимодействия для подачи команды на передачу крутящего момента, предназначенной для привода (5) передачи крутящего момента, на основании соответствующих сигналов от средств определения и средства управления антиблокировкой колес, и в которой средство управления выполнено с возможностью передачи на средство управления антиблокировкой колес сигнала деактивации для отключения системы антиблокировки колес при торможении.
2. Система управления по п. 1, отличающаяся тем, что средство (2) управления антиблокировкой колес выполнено с возможностью определения команды антиблокировки колес в зависимости от команды передачи крутящего момента, поступившей от средства (3) управления приводом передачи крутящего момента, при этом средство (3) управления приводом передачи крутящего момента выполнено с возможностью определения команды передачи крутящего момента в зависимости от команды антиблокировки колес.
3. Система управления по п. 1, отличающаяся тем, что содержит орган (4) ручного управления, связанный со средством (3) управления приводом передачи крутящего момента, причем орган (4) ручного управления выполнен с возможностью установки во множество положений, а также с возможностью управления водителем транспортного средства и с возможностью подачи сигнала в зависимости от положения, выбранного водителем.
4. Система управления по из п. 1, отличающаяся тем, что она содержит средство (18) определения ситуации вождения, выполненное с возможностью подачи командного сигнала в направлении управляемого переключателя (19) в зависимости от сигналов, поступивших от средств (1) определения, и от команды передачи крутящего момента, поступившей от средства (3) управления приводом передачи крутящего момента, и управляемый переключатель (19), выполненный с возможностью подачи сигнала обнаружения блокировки колес.
5. Система управления по п. 4, отличающаяся тем, что содержит первое средство (16) обнаружения блокировки колес и второе средство (17) обнаружения блокировки колес, каждое из которых соединено с контактом управляемого переключателя (19) и каждое из которых выполнено с возможностью определения блокировки колес во время торможения в зависимости от сигналов скорости вращения каждого колеса, поступающих от средств (1) определения.
6. Система управления по п. 4, отличающаяся тем, что содержит средство (20) оценки уровня торможения, выполненное с возможностью подачи сигнала в зависимости от сигнала давления в тормозном контуре, поступающего от средств (1) определения, а также логический оператор (21) типа И, выполненный с возможностью подачи команды антиблокировки колес, связанной с состоянием работы средства управления антиблокировкой колес, в зависимости от сигналов, поступивших от управляемого переключателя (19) и от средства (20) оценки уровня торможения.
7. Система управления по п. 6, отличающаяся тем, что содержит средство (36) определения активности системы антиблокировки колес, выполненное с возможностью определения командного сигнала включения системы антиблокировки колес в зависимости от сигналов, поступающих от средств определения, и от команды антиблокировки колес, поступающей от средства (2) управления антиблокировкой колес.
8. Система управления по п. 7, отличающаяся тем, что содержит средство (37) управления режимом вождения, выполненное с возможностью определения режима вождения, применяемого к приводу (5) передачи крутящего момента, в зависимости от сигналов, поступающих от средств (1) определения, и от командного сигнала включения системы антиблокировки колес, поступившего от средства (36) определения активности системы антиблокировки колес, при этом средство (37) управления режимом вождения выполнено с возможностью подачи командного сигнала управления режимом.
9. Система управления по п. 8, отличающаяся тем, что содержит средство (38) определения заданных значений крутящего момента и средство (39) переключения, при этом средство (38) определения заданных значений крутящего момента предназначено для определения заданных значений крутящего момента, применяемых к приводу (5) передачи крутящего момента для каждого режима вождения, который может выбрать водитель, а также для режима торможения, при этом средство (39) переключения выполнено с возможностью подачи команды на передачу крутящего момента в направлении привода (5) передачи крутящего момента в зависимости от командного сигнала управления режимом, поступившего от средства (37) управления режимом вождения, и от сигналов, поступивших от средства (38) определения заданных значений крутящего момента.
10. Способ управления передачей крутящего момента для транспортного средства с четырьмя ведущими колесами с управлением антиблокировкой колес и с управлением передачей крутящего момента, отличающийся тем, что
команда антиблокировки колес зависит от команды передачи крутящего момента и
команда передачи крутящего момента зависит от команды антиблокировки колес, причем сигнал деактивации поступает с управления передачей крутящего момента на управление антиблокировкой колес для отключения системы антиблокировки колес при торможении.
11. Способ управления по п. 10, отличающийся тем, что команда антиблокировки колес зависит от команды передачи крутящего момента, в частности от запроса режима вождения водителем, от состояния системы передачи крутящего момента и от активного режима вождения в системе передачи крутящего момента.
12. Способ управления по п. 10, отличающийся тем, что сигнал обнаружения блокировки колес определяют в зависимости по меньшей мере от двух режимов обнаружения блокировки колес и в зависимости от скорости транспортного средства и от команды передачи крутящего момента, в частности от запроса режима вождения водителем, от состояния системы передачи крутящего момента и от активного режима вождения в системе передачи крутящего момента.
13. Способ управления по п. 12, отличающийся тем, что устанавливают первый режим обнаружения блокировки колес, если запрошенный водителем режим вождения не является внедорожным, или если активный режим вождения в системе передачи крутящего момента не является внедорожным, или если скорость транспортного средства превышает пороговое значение, или если обнаруживают нарушение в работе привода (5) передачи крутящего момента, отличное от теплового нарушения.
14. Способ управления по п. 12, отличающийся тем, что устанавливают второй режим обнаружения блокировки колес, если первый режим обнаружения блокировки колес не был активирован, при этом второй режим обнаружения блокировки колес характеризуется меньшей чувствительностью обнаружения, чем чувствительность первого режима обнаружения блокировки колес.
15. Способ управления по п. 12, отличающийся тем, что определяют сигнал обнаружения торможения, если давление в системе торможения превышает пороговое значение, определяют команду антиблокировки колес в зависимости от сигнала обнаружения блокировки колес и от сигнала обнаружения торможения, и определяют командный сигнал включения системы антиблокировки колес в зависимости от скорости транспортного средства, от команды антиблокировки колес, от запроса режима вождения водителем и от сигнала запроса торможения.
16. Способ управления по п. 15, отличающийся тем, что определяют заданное значение передачи крутящего момента в режиме с двумя ведущими колесами, заданное значение передачи крутящего момента в режиме с четырьмя ведущими колесами, заданное значение передачи крутящего момента во внедорожном режиме с четырьмя ведущими колесами и заданное значение передачи крутящего момента в режиме торможения, выбирают заданное значение передачи крутящего момента в зависимости от скорости транспортного средства, от запроса режима вождения водителем, от нажатия педали тормоза, от активации ручного тормоза и от командного сигнала включения системы антиблокировки колес, и подают команду передачи крутящего момента в зависимости от выбранного заданного значения передачи крутящего момента.
| US 4770266 A, 13.09.1988 | |||
| US 5612880 A, 18.03.1997 | |||
| US 5249849 A, 05.10.1993 | |||
| Транспортное средство | 1986 |
|
SU1342762A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНЫХ СРЕДСТВ | 2000 |
|
RU2240934C2 |

