Изобретение относится к транспортной технике, в частности к движителям транспортных средств высокой проходимости.
Известен движитель (см. патент RU 2344961 С1, МПК B62D 57/00 (2006.01), F03G 3/00, 2006.01 - аналог). Движитель содержит платформу, установленную на ней раму с закрепленной осью. Рама установлена вертикально на платформе, а на оси установлены маятник и привод вращения. Сектор колебания маятника расположен в плоскости движения. Привод вращения связан цепными передачами с колесом с грузом, расположенным на маятнике, и приводом колебаний маятника, выполненным в виде кривошипно-шатунного механизма. Ось колебаний маятника закреплена на раме между платформой и колесом с грузом. Центробежная сила, приподнимающая движитель в момент его перемещения в заданном направлении, образуется в соответствии с колебаниями маятника. Маятник, в связи с движением в прямом и обратном направлении, в процессе колебания не может развивать большие скорости. Следовательно, ограничивается угловая скорость вращения груза, от которой зависит центробежная сила. Поэтому снижаются скорость перемещения платформы, тяговое усилие и повышается расход энергии на перемещение. Кроме того, сложная цепная передача и кривошипно-шатунный механизм усложняют конструкцию движителя.
Эти недостатки исключаются в движителе (см. патент RU 2460661 С2, МПК B62D 57/00 (2006.01), F03G 7/08 (2006.01) - прототип).
Этот движитель содержит платформу, взаимодействующую с опорной поверхностью, установленную на ней раму. Зубчатые колеса с эксцентрично расположенными грузами и привод вращения. В раме движителя установлен вал с центральным зубчатым колесом, связанным с зубчатыми колесами с грузами, расположенными на осях водила, установленного на валу и связанного с приводом вращения. Центральное зубчатое колесо, по меньшей мере, имеет одинаковый диаметр с зубчатыми колесами, а центры тяжести грузов зубчатых колес в исходном положении располагаются на радиальной оси центрального зубчатого колеса, на максимальном или минимальном расстоянии от его оси.
Недостатками этого движителя является то, что больше четырех зубчатых колес нельзя установить на осях водила с одинаковым диаметром с центральным зубчатым колесом. Радиус вращения грузов не может превышать сумму радиуса центрального колеса и диаметра колеса на оси водила. Отсутствуют другие средства увеличения, указанного радиуса вращения грузов, в относительном их движении. Это ограничивает возможности повышения сил, действующих на движитель. Кроме того зубчатое соединение колес усложняет конструкцию, а вращение зубчатых колес с грузами в относительном движении повышает расход энергии, так как представляет собой относительно большую массу.
Задачей изобретения является повышение скорости, тягового усилия, проходимости движителя, снижение энергозатрат на его перемещение и упрощение конструкции.
Задача достигается тем, что движитель, содержащий платформу, взаимодействующую с опорной поверхностью, расположенную на ней раму, в раме установлен вал с колесом, рычагом его поворота и наружным валом, связанным с грузами и приводом вращения. Колесо выполнено в виде кулачка с эксцентрично выполненным контуром. Наружный вал связан с направляющими, в которые подвижно установлены подпружиненные штоки, связанные с грузами и роликами, установленными с возможностью взаимодействия с кулачком. Силы, перемещающие движитель, повышаются увеличением эксцентричности контура кулачка и увеличением количества грузов.
Поставленная задача достигается и тем, что в относительном движении грузы совершают радиальное перемещение от центра к периферии со сжатием упругих элементов, пружин, а от периферии к центру под действием этих пружин, где перемещение грузов в радиальном направлении осуществляется взаимодействием роликов с кулачком. Это позволяет большим количеством грузов и большим перемещением их в радиальном направлении увеличивать действующие силы.
Перемещение грузов в радиальном направлении осуществляется роликами с кулачком и магнитами. Это дополнительно повышает действующие силы. Взаимодействие магнитов с грузами прекращается до начала выхода их из магнитного поля. Это повышает действующие силы и снижает энергозатраты на перемещение движителя.
Перемещение грузов в радиальном направлении осуществляется магнитами. Это упрощает работу движителя и его конструкцию.
Перемещение грузов в радиальном направлении осуществляется электромагнитами до начала выхода грузов из электромагнитного поля. Это повышает действующие силы на движитель и его маневренность.
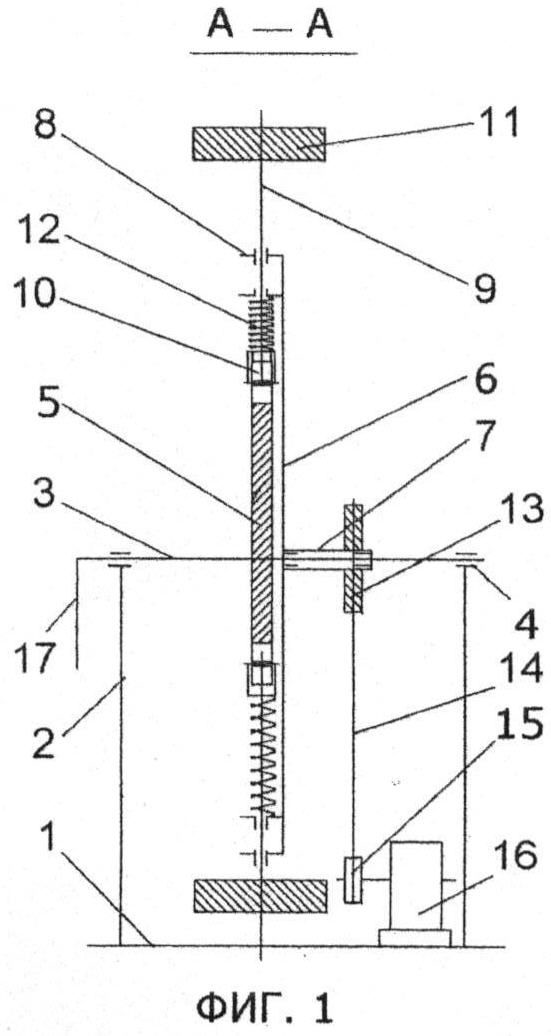
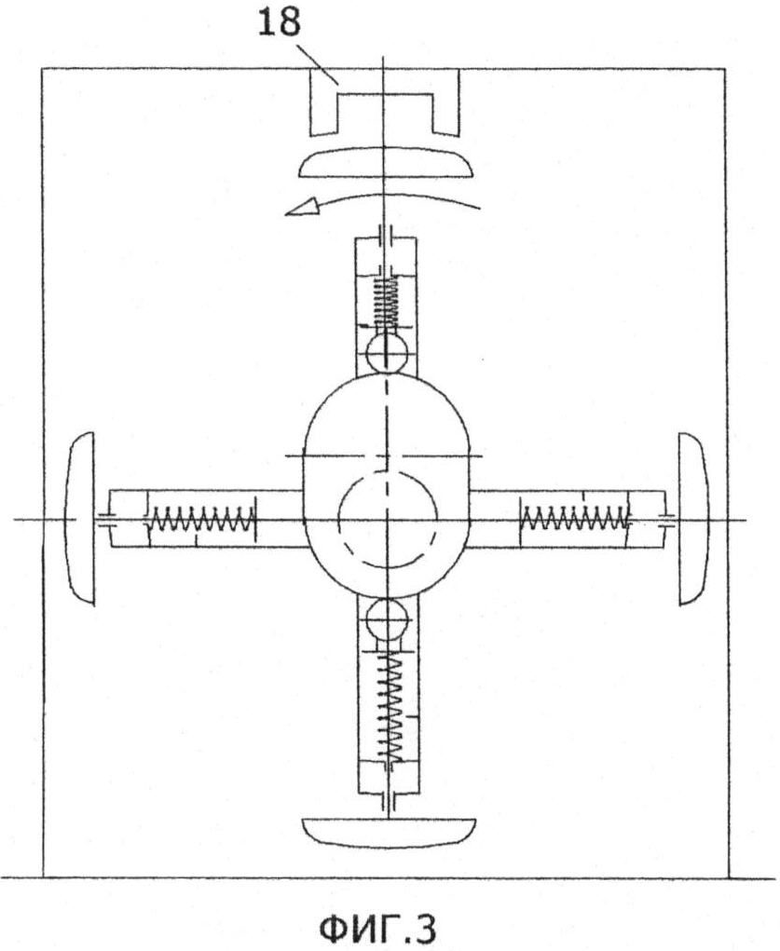
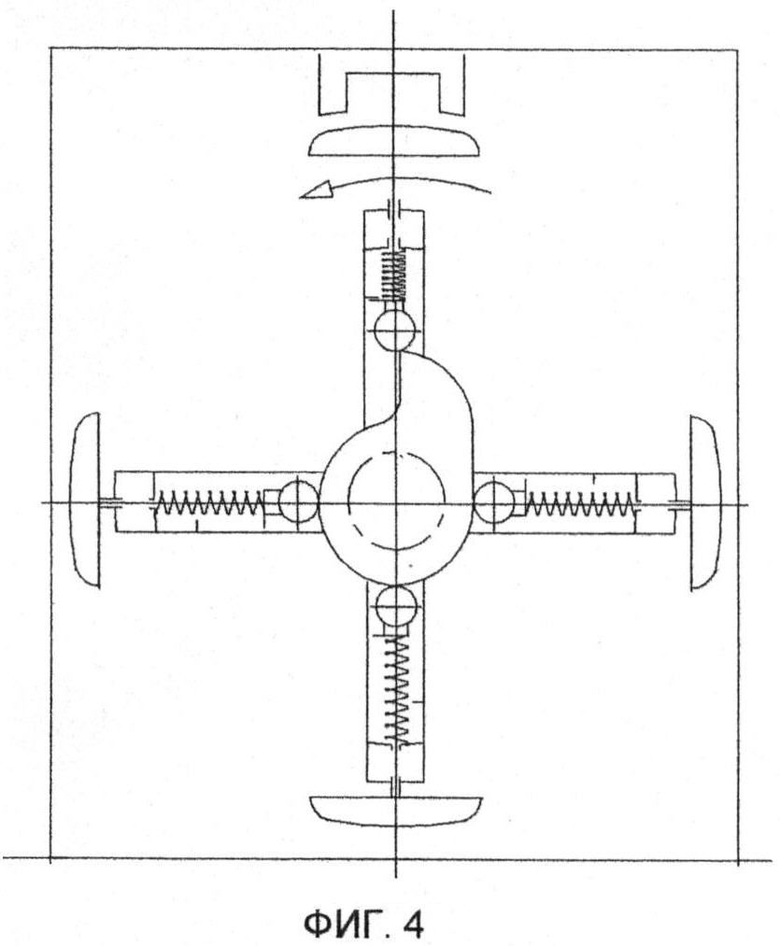
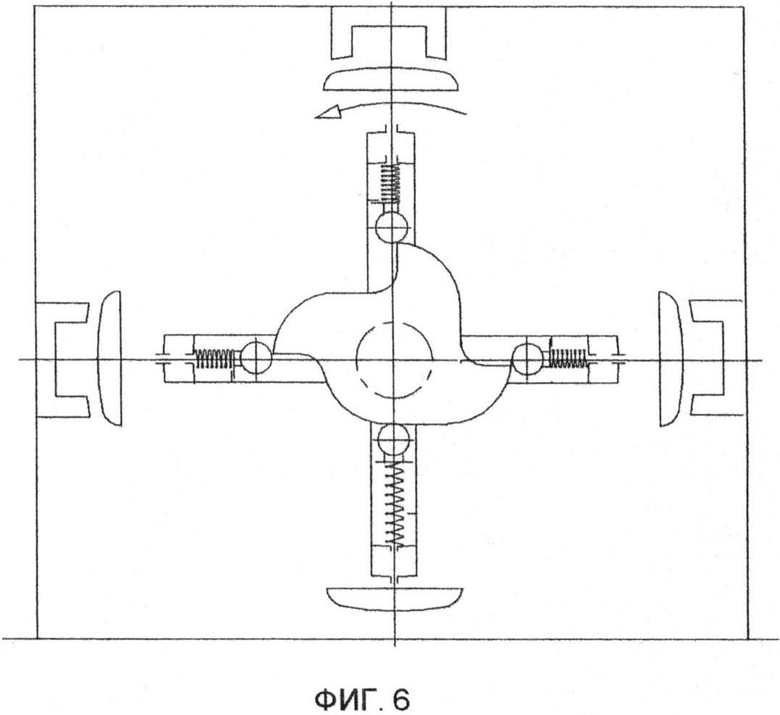
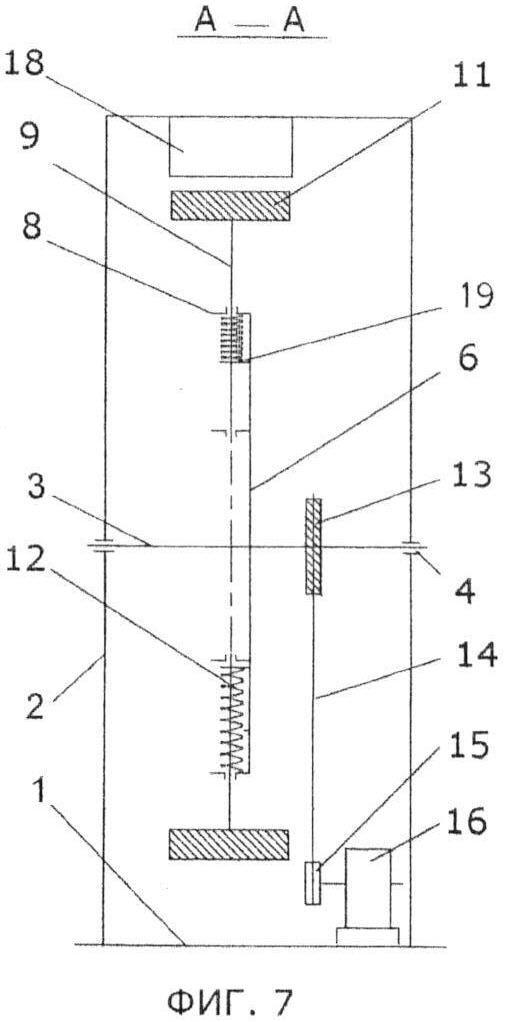
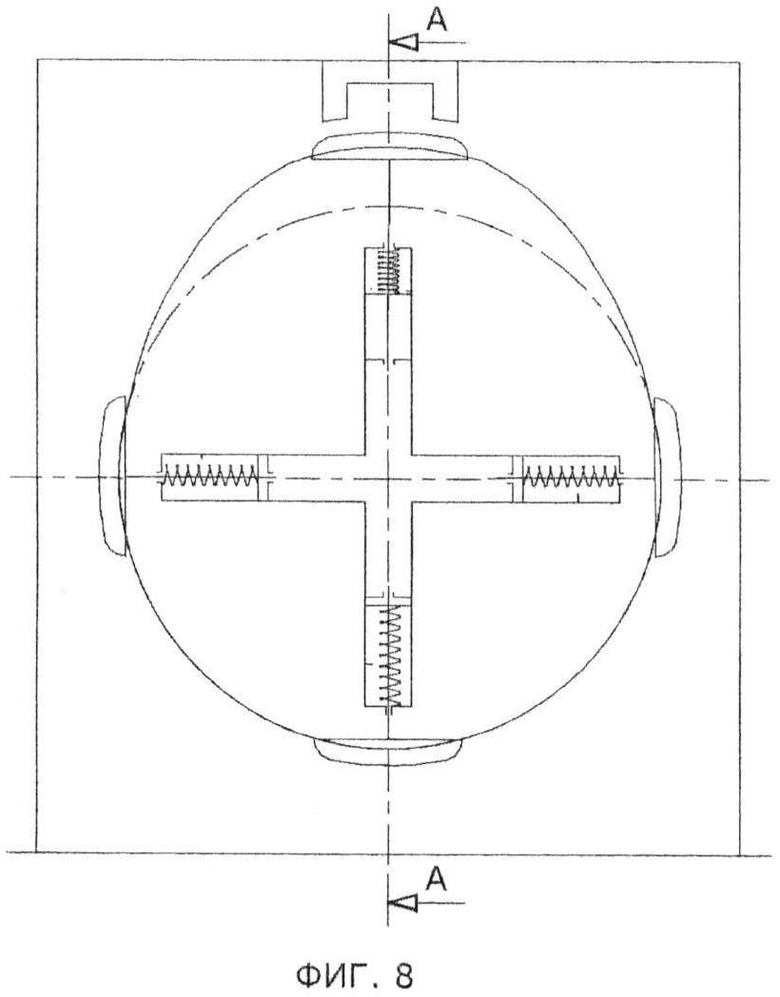
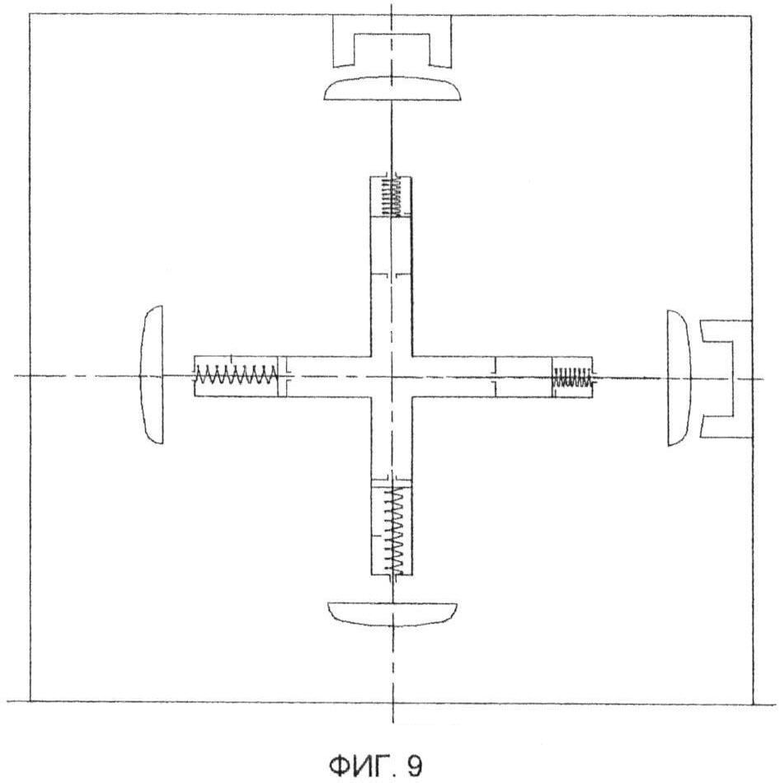
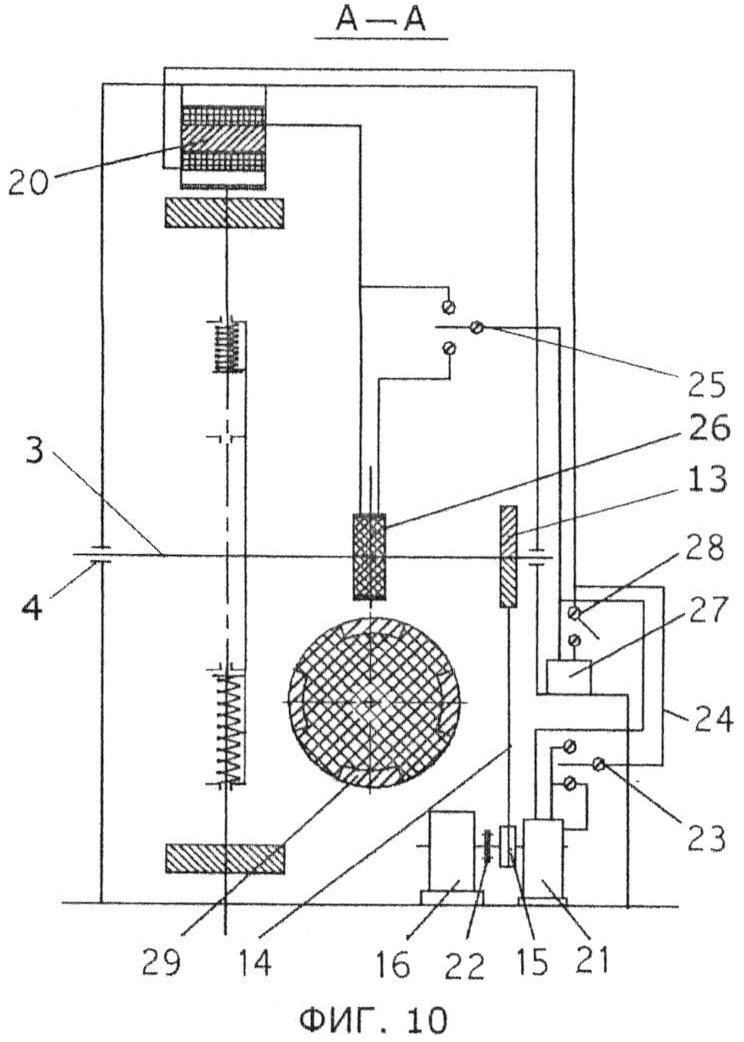
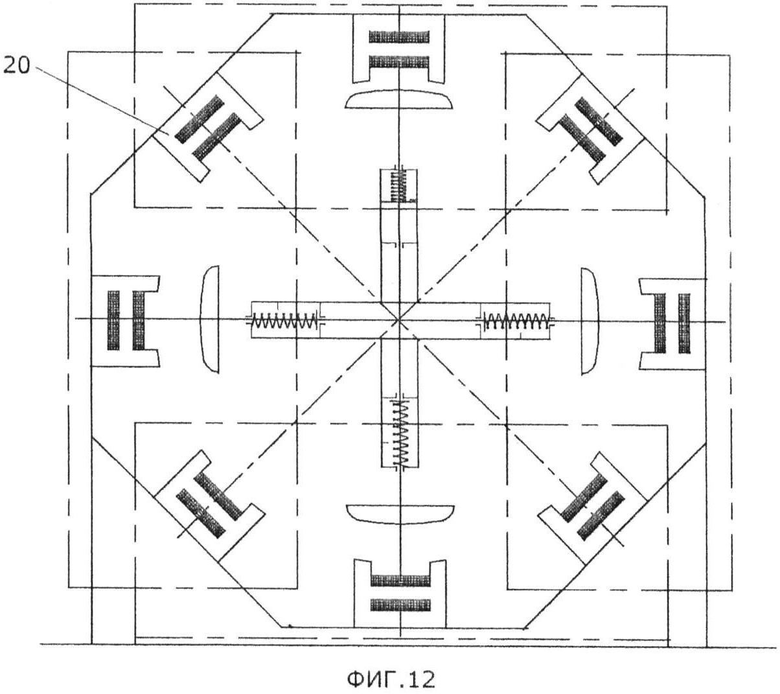
На чертежах схематично изображены различные варианты устройства движителя. На фиг.1 показан разрез устройства с роликами, кулачком и приводом вращения грузов 11. На фиг.2 показан вид этого устройства с осями координат X, У, которые относятся и ко всем другим устройствам. Показана траектория центров тяжести грузов, описанные ею площади выше и ниже оси X и результирующая заштрихованная площадь. Показаны действующие силы, в том числе и отдельно на кулачке в большем масштабе. Показаны направления вращения грузов и перемещение движителя в заданном направлении. На фиг.3 показано устройство с роликами, кулачком и магнитом. На фиг.4-6 показаны устройства с кулачками и с магнитами, где контуры кулачков соответственно количеству магнитов один, два, три, имеют переходы, выполненные с большего радиуса на меньший. На фиг.7 показан разрез устройства фиг.8 с магнитом. На виде этого устройства, фиг.8, показана траектория движения центров тяжести грузов. Показаны площади выше и ниже оси X, охваченные траекторией, и показана результирующая площадь. На фиг.9 показано устройство с двумя магнитами. На фиг.10 показан разрез устройства с электромагнитом с источниками его питания, приводом вращения и схемой его подключения. Вид этого устройства изображен на фиг.11. На фиг.12 показана упрощенная схема устройства с электромагнитами, расположенными по замкнутому контуру рамы, выполненной в виде шестигранника.
Движитель, фиг.1, 2, содержит платформу 1, расположенную на ней раму 2, выполненную из проката, на которой установлен вал 3 на подшипниках 4. В средней части вала 3 закреплен кулачок 5 с эксцентрично выполненным контуром относительно оси вала 3, оси X, и расположено основание 6, закрепленное на конце наружного цилиндрического вала 7, установленного на подшипниках 4. На основании 6 радиально закреплены направляющие 8. В них установлены штоки 9, концы которых, расположенные в центральной части, связаны с роликами 10, взаимодействующими с кулачком 5, а в периферийной части связаны с грузами 11. Штоки 9 подпружинены пружинами 12, расположенными между роликами 10 и отверстиями направляющих 8, к которым на периферии они закреплены. На другом конце вала 7 установлен шкив 13, связанный ременной передачей 14, со шкивом 15, установленным на валу двигателя 16. Вал 3 связан с рычагом 17, поворота кулачка 5.
На фиг.3 установлен в верхней части рамы 2 магнит 18 с возможностью взаимодействия с грузами 11. На фиг.4-6 в устройствах установлены магниты 18 последовательно один в верхней части рамы 2, а два и три на ее боковых стойках. Соответственно магнитам 18 на кулачках 5 выполнены переходы с большего радиуса его контура на меньший.
В устройствах фиг.7, 8, 9 и фиг.10, 11 основание 6 закреплено на валу 3, а в верхней части рамы 2 установлены магнит 18, фиг.7, 8, 9, электромагнит 20 фиг.10, 11 с возможностью взаимодействия их с грузами 11. Грузы 11 связаны через штоки 9, направляющие 8, основание 6, вал 3, шкив 13, ременную передачу 14, шкив 15 с двигателем 16.
В устройстве фиг.10, 11 шкив 15 расположен на валу двигателя-генератора 21, который через муфту сцепления 22 связан с двигателем 16. Электрическая схема подключения электромагнита 20, фиг.10, 11, включает двигатель-генератор 21, переключатель 23, провода 24, электромагнит 20, переключатель 25, коллектор 26, щетки коллектора 26 не показаны, аккумулятор 27, включатель 28 и пластины 29, расположенные по контуру коллектора 26 и параллельно оси вала 3.
В устройстве фиг.12 электромагниты 20 расположены по замкнутому контуру рамы 2, выполненной в виде шестигранника, и распределены по секциям по сторонам влево, вправо, вверх, вниз. Каждая секция имеет включатель 28 и соединена с коллектором 26 через щетки, установленные на коллекторе 26, на стороне, соответствующей расположению секции. На всех направляющих 8 фиг.7, 8, 9 и фиг.10, 11, 12 установлены упоры 19.
Работает движитель следующим образом. Раскручиваются грузы 11 двигателем 16 через шкив 15, ременную передачу 14, шкив 13, вал 7, основание 6 с направляющими 8 с подпружиненными штоками 9 и с роликами 10, фиг.1, 2. От вращения грузов 11 образуются центробежные силы, направленные радиально от центра к периферии, приложенные в центрах тяжести грузов 11, центры тяжести грузов 11 не показаны. По величине эти силы ниже оси X минимальные и одинаковые, так как расстояние центров тяжести грузов 11 от оси X, оси вала 3, одинаковое, потому что ролики 10 перекатываются по дуге окружности контура кулачка 5. Выше оси X, соответственно эксцентричности контура кулачка 5, расстояние от оси X до центров тяжести грузов 11 увеличивается до совпадения их центров тяжести с осью У, а затем уменьшается до совпадения с осью X. Соответственно увеличивается и уменьшается перемещение грузов 11, следовательно, увеличиваются и уменьшаются центробежные силы, момент инерции и сжатие пружин 12, под действием которых грузы 11 перемещаются от периферии к центру. Центробежная сила Р является результирующей центробежных сил Р1, действующей выше оси X, и Р2, действующей ниже оси X. При этом сила Р1 больше силы Р2 выше оси X и равна силе Р2 при совпадении ее с осью X, потому что радиус вращения грузов 11 выше оси X больше радиуса вращения грузов ниже оси X. Сила Т перпендикулярна силе Р и является результирующей сил Т1 и Т2, где сила Т1 связана с действием момента инерции, возникающего выше оси X, а сила Т2 связана с действием момента инерции, возникающего ниже оси X. Так как сила Р действует выше оси X, то она приподнимает движитель, а сила Т перемещает его вперед по заданному направлению.
В устройстве фиг.3 ролики 10 взаимодействуют с кулачком 5, а магнит 18 взаимодействует с грузами 11. При входе грузов 11 в магнитное поле он притягивает их по ходу вращения и в радиальном направлении от центра к периферии. При выходе из магнитного поля, наоборот, сила притяжения магнита 18 тормозит их вращение и перемещение их от периферии к центру. Однако при всем этом увеличивается радиус вращения грузов 11 от большего их перемещения, поэтому увеличиваются и сила Р, и сила Т, где сила Т увеличивается от увеличения момента инерции грузов 11. Как в этом устройстве, так и в последующих устройствах настройка положения кулачка 5 относительно магнита 18 осуществляется поворотом рычага 17, а касания грузов 11 магнита 18 предотвращаются упором 19.
В устройствах фиг.4-6 торможение вращения грузов 11 снижается перед началом выхода их из магнитного поля путем расположения в этом месте переходов на кулачках 5 радиуса контура, от большего к меньшему. Зазор между грузами 11 и магнитом 18 увеличивается, сила притяжения его снижается, снижается и торможение вращения грузов 11, следовательно, снижается и нагрузка на привод их вращения. На фиг.5 перемещение движителя в заданном направлении увеличивается силой Р, направленной в ту же сторону, что и сила Т. Сила Р образована таким же образом, как на фиг.4 и фиг.5, где магнит 18 расположен в верхней части рамы 2. На фиг.6 силы Р действуют в горизонтальном направлении, но в противоположные стороны, поэтому действия на движитель не оказывают, однако нагрузка на привод вращения грузов 11 снижается тем, что увеличено их взаимодействие и с магнитами 18, расположенными на стойках рамы 2.
В устройстве фиг.7, 8, 9 перемещение грузов 11 от центра к периферии осуществляется магнитом 18, образование сил Р и Т происходит так же, как и в устройстве фиг.1, 2, потому что траектория перемещения грузов 11 также несимметрична относительно оси X и результирующая площадь тоже расположена выше оси X, фиг.8. Здесь двигателем 16 грузы 11 вращаются через шкив 15, ременную передачу 14, шкив 13, закрепленный на валу 3, основание 6, направляющие 8 и шток 9. При вращении грузы 11 попадают в магнитное поле и притягиваются к магниту 18, как по ходу вращения, так и в радиальном направлении. Пружина 12 через шток 9 сжимается. При выходе из магнитного поля грузов 11 происходит их торможение, но оно прекращается увеличением зазора между магнитом и грузами 11 от их вращения, после чего они пружинами 12 перемещаются от периферии к центру. В результате образовываются силы Р и Т, перемещающие движитель «вперед».
В устройстве фиг.10, 11 перемещение грузов 11 от центра к периферии осуществляется электромагнитом 20. Здесь торможение вращения грузов 11 не происходит из-за отключения тока перед началом выхода их из электромагнитного поля, во вращательном движении. В электромагнит 20 ток поступает от двигателя-генератора 21, который работает в режиме генератора и вращается двигателем 16 через муфту сцепления 22, а через шкив 15, ремень 14, шкив 13, вал 3 вращает основание 6 вместе с направляющими 8, пружинами 12 и грузами 11. От двигателя-генератора 21 последовательно ток поступает по проводникам 24 через переключатель 23, верхний контакт, электромагнит 20, переключатель 25, верхний контакт, и двигатель-генератор 21. При таком соединении электромагнит 20 работает как магнит, отличие по сравнению с устройством, фиг.7. 8, 9, составляет то, что электромагнитная сила его может изменяться по величине двигателем-генератором 21 в зависимости от оборотов вращения двигателя 16. При опущенном контакте переключателя 25 вниз подключается коллектор 24. Его одна пластина 29 замыкает обе щетки и образует замкнутую цепь, включающую электромагнит 20. В этом случае вход в электромагнитное поле грузов 11 происходит так же, как и при магните 18, фиг.7, 8, но перед началом выхода из электромагнитного поля электромагнит 20 отключается вращением пластин 29. Притяжение грузов 11 в момент их удаления от электромагнита 20 прекращается и они пружинами 12 перемещаются от периферии к центру. От такого притяжения грузов 11 при их входе в электромагнитное поле по ходу их вращения и снижения торможения вращения при выходе из него, энергозатраты привода вращения снижаются. Силы Р и Т выше и ниже оси X образуются так же, как на фиг.7, 8. В этом устройстве с электромагнитом 20 вращать грузы 11 может и двигатель-генератор 21, используя энергию аккумулятора 27, который питает и электромагнит 20. Для этого контакты переключателя 23 и включателя 28 переводятся в нижнее положение, что переводит двигатель-генератор 21 в режим работы двигателя. При этом двигатель 16 отсоединяется муфтой сцепления 26. Заряжаться аккумулятор 27 может при включении его в электрическую цепь во время вращения грузов 11 двигателем 16, соединенным через муфту сцепления 22 с двигателем-генератором 2.
В устройстве фиг.12 секции электромагнитов 20 подключаются так же, как один такой же электромагнит 20 на фиг.10, при этом происходит перемещение одновременно трех грузов 11, расположенных в одной секции. Кроме этого возможны различные подключения как отдельных секций, отдельных электромагнитов 20, так и различное их сочетание при большем количестве в схеме включателей и переключателей. Возможно и горизонтальное расположение рамы 2, для большего повышения маневренности движителя.
Во всех указанных устройствах на движитель действуют результирующие силы Р и Т. На примере устройства фиг.1, 2 сила Р=Р1-Р2, где Р1 относится к площади вертикальных проекций перемещений h грузов 11 выше оси X, а Р2 относится к площади вертикальных проекций перемещений h грузов 11 ниже оси X, фиг.2. Численная величина центробежных сил равна P1=mrω″, где m - масса каждого груза 11, r - радиус, включающий перемещение h, равный расстоянию от оси X до центра тяжести груза 11, Р2=mrω″, где r без величины h, а ω - угловая скорость вращения грузов 11. Сила Т зависит от сопротивления, которое оказывает крутящему моменту привода вращения M1, момент М2, связанный с моментом инерции. Где М1=N/ω, N - мощность двигателя 16, а М2=J ε, где J - момент инерции грузов 11, а ε - угловое ускорение вращения грузов 11. При этом J=mr″.
В переносном движении грузов 11, фиг.7, 8, при входе их в магнитное поле, происходит ускорение их вращения, при выходе из него замедление, торможение. В общем, происходит уравновешивание ускорения и замедления, не влияющее на вращение грузов 11. В относительном движении грузов 11 в любом случае на выходе из магнитного поля остаются сжатыми пружины 10. Потенциальная энергия пружин превращается в кинетическую через снижение момента инерции, при перемещении грузов 11 сжатыми пружинами 12 от периферии к центру, что существенно снижает энергозатраты привода вращения особенно в тех устройствах, где на кулачках 5 имеются переходы.
Таким образом, повышение скорости, тягового усилия, проходимости движения, снижение затрат на перемещение и упрощение конструкции достигается следующими отличительными признаками.
1. Колесо выполнено в виде кулачка с эксцентрично выполненным контуром. Наружный вал связан с направляющими, в которые подвижно установлены подпружиненные штоки, связанные с грузами и роликами, установленными с возможностью взаимодействия с кулачком. Это позволяет увеличить количество грузов и их радиальное перемещение, что увеличивает силы, приподнимающие движитель и перемещающие его в заданном направлении.
2. В относительном движении грузы совершают радиальное перемещение от центра к периферии со сжатием упругих элементов. От периферии к центру под действием этих упругих элементов. Это расширяет способы образования действующих сил на движитель и возможности их увеличения.
3. Перемещение грузов от центра к периферии осуществляется взаимодействием роликов с кулачком с эксцентричным контуром. Это образует асимметрию траектории движения центров тяжести грузов, в результате которой создаются действующие на движитель силы, приподнимающие и перемещающие его в заданном направлении.
4. Грузы от центра к периферии перемещаются взаимодействием роликов с кулачком с эксцентричным контуром и взаимодействием магнитов с грузами. Это повышает действующие силы, перемещающие движитель, и снижает энергозатраты на его перемещение.
5. Взаимодействие магнитов с грузами прекращается перед началом их выхода из магнитного поля. Это повышает действующие силы на движитель и снижает энергозатраты на его перемещение.
6. Перемещение грузов от центра к периферии осуществляется магнитами, взаимодействующими с грузами. Это упрощает конструкцию движителя.
7. Перемещение грузов от центра к периферии осуществляется взаимодействием электромагнитов с грузами, которое прекращается перед началом выхода их из магнитного поля. Это повышает действующие силы, маневренность движителя и снижает энергозатраты на его перемещение.
Область применения движителя по сравнению с движителями такого типа расширяется в связи с снижением энергозатрат на перемещение, повышением скорости, тягового усилия, проходимости и упрощением конструкции. Применение движителя по опорной поверхности с низким коэффициентом трения, например снег, лед, вода, может существенно снизить энергозатраты на перемещение движителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ И СПОСОБ ЕГО ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2460661C2 |
| ДВИЖИТЕЛЬ И СПОСОБ ЕГО ПЕРЕМЕЩЕНИЯ | 2012 |
|
RU2550410C2 |
| ДВИЖИТЕЛЬ | 2004 |
|
RU2288858C2 |
| ДВИЖИТЕЛЬ | 2007 |
|
RU2344961C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2006 |
|
RU2347923C2 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2282734C2 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2019 |
|
RU2708178C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2338906C1 |
| РОТОРНО-ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2021 |
|
RU2772831C1 |
| Устройство для сварки трением | 1987 |
|
SU1602649A1 |


Группа изобретений относится к транспортным средствам, а именно к движителям. Движитель содержит платформу, взаимодействующую с опорной поверхностью, расположенную на ней раму, в раме установлен вал с колесом, рычагом его поворота и наружным валом, связанным с грузами и приводом вращения. Колесо выполнено в виде кулачка с эксцентрично выполненным контуром, а наружный вал связан с направляющими, в которые подвижно установлены подпружиненные штоки, связанные с грузами и роликами, установленными с возможностью взаимодействия с кулачком. Способ перемещения движителя, взаимодействующего с опорной поверхностью, включает переносное вращательное и относительное движение грузов от привода вращения, центры тяжести которых образуют траекторию движения, несимметричную относительно оси вращения грузов. В относительном движении грузы совершают радиальное перемещение от центра к периферии со сжатием упругих элементов, а от периферии к центру - под действием упругих элементов. Достигается повышение скорости, тягового усилия, проходимости и упрощение конструкции движителя. 2 н. и 5 з.п. ф-лы, 12 ил.
1. Движитель, содержащий платформу, взаимодействующую с опорной поверхностью, расположенную на ней раму, в раме установлен вал с колесом, рычагом его поворота, и наружным валом, связанным с грузами и приводом вращения, отличающееся тем, что колесо выполнено в виде кулачка с эксцентрично выполненным контуром, а наружный вал связан с направляющими, в которые подвижно установлены подпружиненные штоки, связанные с грузами и роликами, установленными с возможностью взаимодействия с кулачком.
2. Способ перемещения движителя, взаимодействующего с опорной поверхностью, включающий переносное вращательное и относительное движение грузов от привода вращения, центры тяжести которых образуют траекторию движения, несимметричную относительно оси вращения грузов, отличающийся тем, что в относительном движении грузы совершают радиальное перемещение от центра к периферии со сжатием упругих элементов, а от периферии к центру под действием упругих элементов.
3. Способ по п. 2, отличающийся тем, что перемещение грузов в радиальном направлении осуществляется взаимодействием роликов с кулачком.
4. Способ по п. 3, отличающийся тем, что перемещение грузов в радиальном направлении осуществляется взаимодействием магнитов с грузами.
5. Способ по п. 4, отличающийся тем, что взаимодействие магнитов с грузами прекращается перед началом выхода их из магнитного поля.
6. Способ по п. 2, отличающийся тем, что перемещение грузов в радиальном направлении осуществляется взаимодействием магнитов с грузами.
7. Способ по п. 2, отличающийся тем, что перемещение грузов в радиальном направлении осуществляется взаимодействием электромагнитов с грузами, которое прекращается перед началом выхода их из электромагнитного поля.
| RU 2003563 C1, 30.11.1993 | |||
| ДВИЖИТЕЛЬ И СПОСОБ ЕГО ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2460661C2 |
| ИНЕРЦИОННЫЙ ИМПУЛЬСНЫЙ ДВУХТАКТНЫЙ ДЕСЯТИЦИЛИНДРОВЫЙ РЕАКТИВНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1999 |
|
RU2163679C2 |
| ДВИЖИТЕЛЬ | 2007 |
|
RU2344961C1 |

