Изобретение относится к транспортной технике, в частности к движителям транспортных средств высокой проходимости.
Известен движитель (см. патент №2288858 на изобретение, заявка №2004135586 от 6 декабря 2004 года), содержащий платформу, подпружиненный маятник с бойком, сектор колебания которого расположен в плоскости движения, подвешенный к раме с закрепленными на ней шкивами. Рама выполнена с упорами, закрепленными на ее стойках, установленных на платформе и связанных с маятником пружинами в плоскости его колебаний. На маятнике расположен шкив с грузом, который предназначен для вращения от шкива привода, и боек, установленный с возможностью взаимодействия, по меньшей мере, с одним упором, а осевая линия сектора колебаний маятника расположена перпендикулярно направлению движения. В этом движителе передача тягового усилия от маятника к платформе осуществляется через пружины. Это не позволяет стабильно и в полной мере использовать каждый цикл колебаний маятника для перемещения платформы движителя из-за отсутствия жесткой связи между маятником и стойками рамы. Возможны несовпадения действий горизонтальных сил, перемещающих платформу, и вертикальных сил, приподнимающих ее в эти моменты. Результатом таких несовпадений являются снижение скорости движения, тягового усилия и повышение энергозатрат на перемещение движителя.
Эти недостатки исключаются движителем (см. патент RU 2344961 С1, МПК B62B 57/00 (2006.01), F03G 3/00, 2006.01 - прототип). Этот движитель содержит платформу, установленную на ней раму, ось колебания маятника, закрепленную на раме. На оси колебаний маятника расположен кривошип, связанный зубчатой передачей с зубчатым колесом с грузом, расположенным на маятнике, и связан с приводом вращения, который передачей, выполненной в виде цепной, связан с приводом колебаний маятника, выполненным в виде кривошипно-шатунного механизма, снабженного грузом.
Недостатком этого движителя является расположение зубчатого колеса с грузом на маятнике, так как в таком случае увеличение угловой скорости зубчатого колеса ограничивается его грузом и, наоборот, увеличение этого груза ограничивает увеличение угловой скорости зубчатого колеса. Следовательно, ограничивается возможность повышения скорости перемещения движителя, его тягового усилия, проходимости и повышаются затраты энергии на перемещение.
В способе преобразования крутящего момента привода вращения в направленное перемещение движителя при расположении зубчатого колеса с грузом на маятнике зубчатое колесо с грузом, вращаясь вокруг своей оси, совершает относительное движение, а колебания маятника с ним представляют собой переносное движение. При смене направления движения маятника в процессе его колебаний скорость его падает до нуля, от чего значительно возрастает ускорение, которое повышает силы, препятствующие движению маятника. Это повышает энергозатраты на перемещение движителя, ограничивает повышение его скорости, тяговое усилие и проходимость. Кроме того, у этого движителя отсутствует возможность осуществлять маневрирование. Возникающие колебания от вращения зубчатого колеса с грузом неприемлемы для преобразования их в дополнительные силы, которые могли бы использоваться для повышения скорости перемещения движителя.
Задачей изобретения является снижение энергозатрат на перемещение, повышение скорости, тягового усилия, проходимости и обеспечение маневренности движителя.
Задача достигается тем, что у движителя, содержащего платформу, установленную на ней раму, зубчатые колеса с грузами, расположенные на осях, и привод вращения, в раме установлен вал с центральным зубчатым колесом, связанным с зубчатыми колесами с грузами, расположенными на осях водила, установленного на валу и связанного с приводом вращения. Центральное колесо имеет, по меньшей мере, диаметр, равный диаметру зубчатых колес с грузами. Связь центрального колеса с зубчатыми колесами с грузами устанавливается в регулируемом исходном положении, при котором центры тяжести грузов зубчатых колес располагаются противоположно на радиальной оси центрального колеса с максимальным и минимальным расстоянием от оси их вращения. Силы, возникающие от вращения зубчатых колес с грузами, рассредотачиваются по сторонам платформы. Это позволяет повышать силы увеличением грузов зубчатых колес и повышением угловой скорости их вращения, ими приподнимать и перемещать движитель в один и тот же момент, а регулированием исходного положения путем изменения величины и направления сил осуществлять маневренность, то есть поворачивать и вращать движитель в разные стороны.
Поставленная задача достигается и тем, что колебания, возникающие от вращения зубчатых колес с грузами, имеют широкий диапазон по их частоте, поэтому они преобразовываются в дополнительные силы, которые также приподнимают и перемещают движитель.
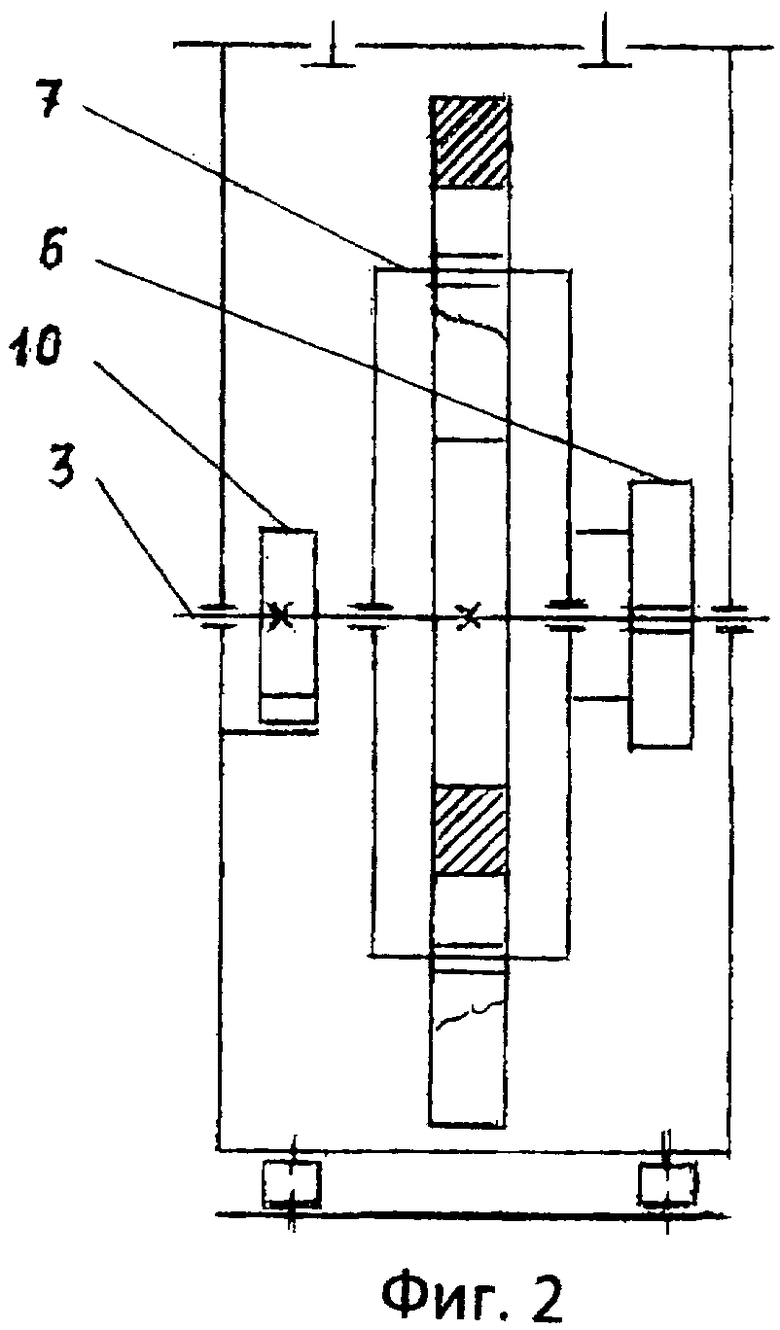
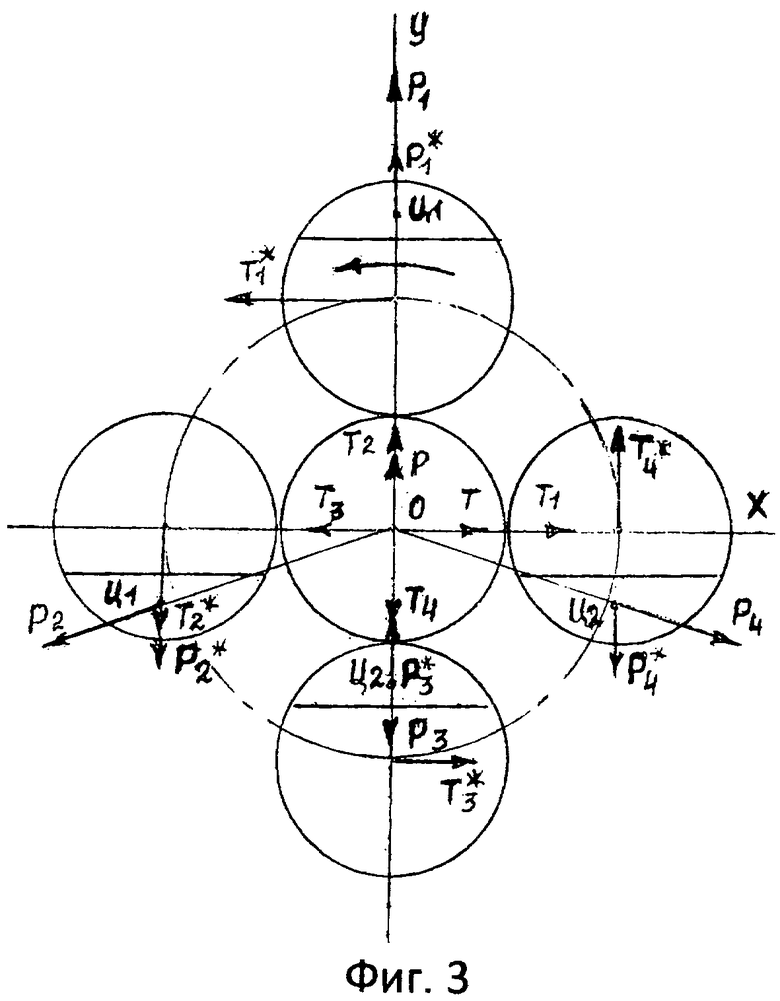
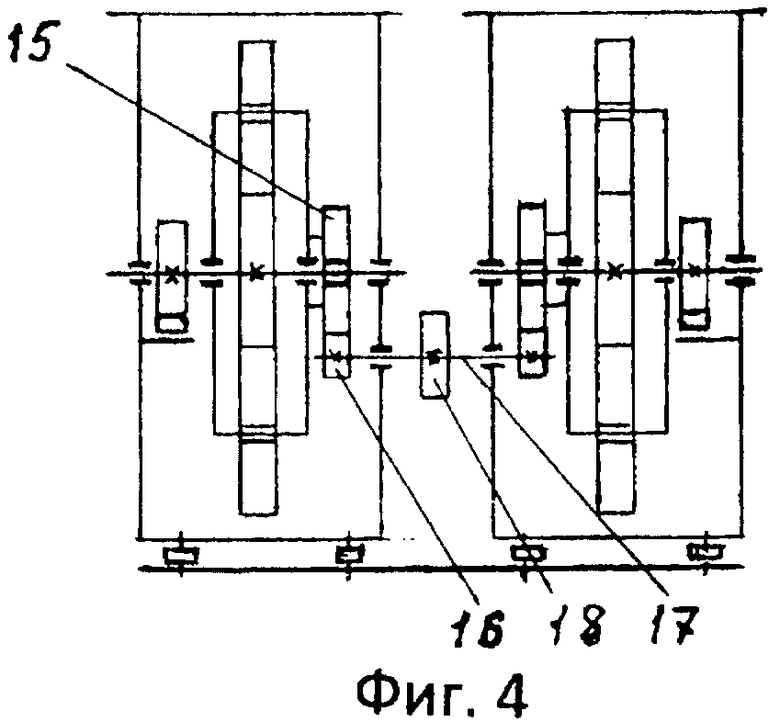
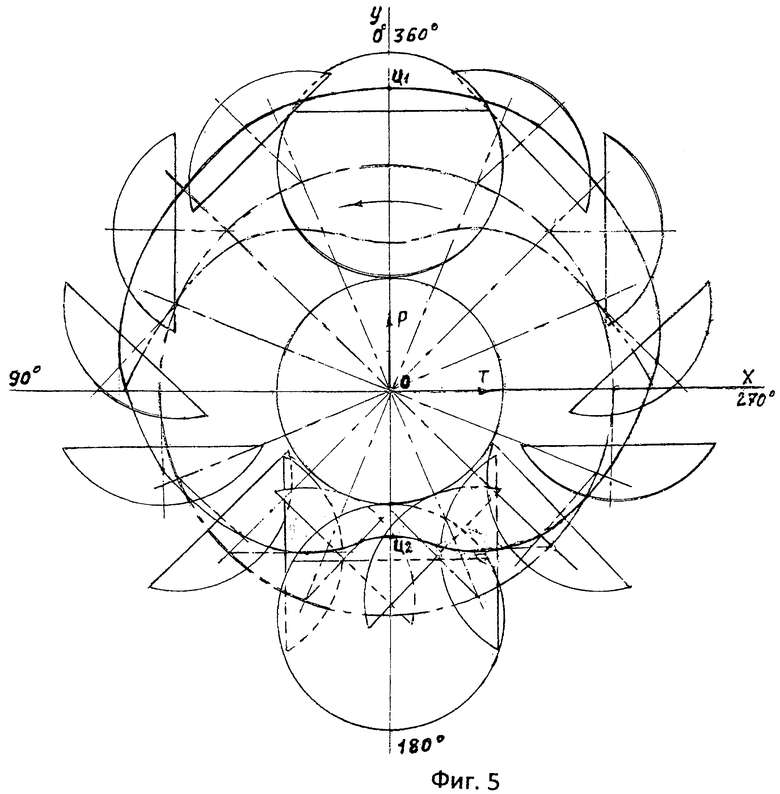
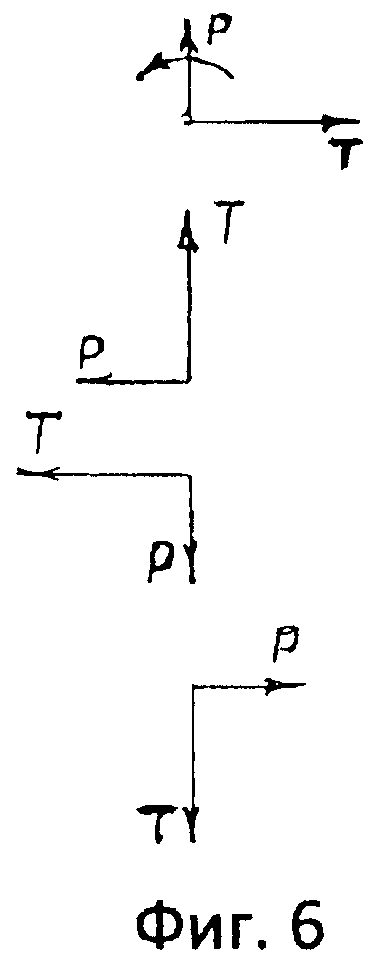
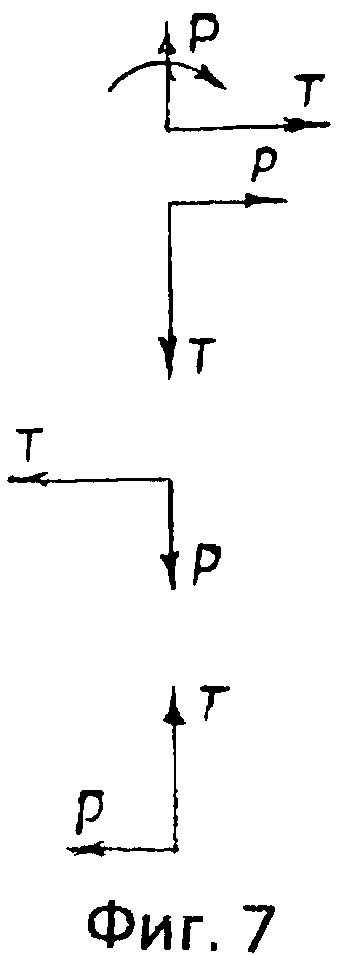
На схематических чертежах показаны: фиг.1 - продольный вид с указанием стрелками направлений вращения зубчатых колес с грузами и перемещения движителя «вперед», на фиг.2 - вид сбоку с разрезами грузов зубчатых колес. На фиг.3 показаны зубчатые колеса с грузами по ходу их вращения в положениях последовательно в первом, втором, третьем, четвертом, а также показаны центробежные силы и пары сил, образованные от крутящего момента привода вращения. Показаны оси координат X и Y и силы, приподнимающие и перемещающие движитель. На фиг.4 показан движитель с двумя рамами, расположенными по противоположным сторонам одной платформы. На фиг.5 показана траектория перемещения центров тяжести Ц1 и Ц2 грузов зубчатых колес при их вращении вокруг оси О центрального колеса. Показаны зубчатые колеса с грузами в первом и девятом положениях, а их грузы в 16 положениях при повороте кривошипов (водила 5) через каждые 22,5 градуса вокруг оси О. На фиг.6 и 7 показаны силы в исходном положении и в положениях, повернутых соответственно на 90, 180, 270 градусов.
Движитель по фиг.1 и фиг.2 содержит платформу 1, согнутую по краям, на которой вертикально закреплена рама 2, выполненная из проката. В раме 2 установлен вал 3 в ее средней части, на его середине закреплено центральное зубчатое колесо 4 и установлено водило 5, связанное через шкив 6 и ременную передачу с приводом вращения (ременная передача и привод вращения на схемах не показаны). Водило 5 снабжено осями 7, на которых установлены зубчатые колеса 8 с грузами 9. Центральное колесо 4 через вал 3 связано с устройством его поворота, включающим зубчатое колесо 10, которое зубчатым соединением связано с зубчатой рейкой 11, подвижно установленной в раме 2. Рама 2 связана с аэродинамическими поверхностями, выполненными, например, в виде панели 12, расположенной параллельно платформе 1, и панели 13, расположенной перпендикулярно направлению перемещения движителя, при этом панели 12 и 13 снабжены по всей площади клапанами 14. На фиг.4 показаны рамы 2, установленные по противоположным сторонам платформы 1. Водила 5 в рамах 2 связаны с зубчатыми колесами 15, соединенными с шестернями 16, закрепленными на валу 17 со шкивом 18, связанным через ременную передачу с приводом вращения. Диаметры зубчатых колес 8 и центрального колеса 4 по меньшей мере одинаковы. Между рамой 2 и платформой 1 установлены упругие элементы 19 с наклоном вперед, в сторону заданного перемещения движителя, фиг.1.
В исходном положении центры тяжести грузов 9 зубчатых колес 8 находятся на максимальном Ц1 и минимальном Ц2 расстоянии на оси Ц1-Ц2 центрального колеса 4 от оси О их вращения, как показано на фиг.1, 3, 5. При вертикальном положении этой оси силы Р и Т соответственно совпадают с осями Y и X, а при повороте оси Ц1-Ц2, что осуществляется поворотом центрального колеса 4, соответственно поворачивается исходное положение и силы Р и Т.
Работает движитель следующим образом. Устанавливается исходное положение путем соответствующего ввода в зубчатое соединение центрального колеса 4 с зубчатыми колесами 8, как показано на фиг.1, 2, 3, 5. Включается привод вращения. Крутящий момент через ременную передачу, шкив 6, водило 5, оси 7 приводит во вращение зубчатые колеса 8 вокруг центрального колеса 4, вала 3, оси О и вокруг осей 7. От вращения вокруг оси О образуются центробежные силы Р1, Р2, Р3, Р4, показанные на фиг.3 в четырех положениях зубчатых колес 8. Направлены эти силы радиально относительно оси О. От вращения зубчатых колес 8 вокруг своих осей образуются равные по величине центробежные силы Р*1, Р*2, Р*3, Р*4, направленные по радиусам соответствующих зубчатых колес 8. Все указанные силы приложены в соответствующих центрах тяжести грузов 9 Ц1 или Ц2 зубчатых колес 8. Численная величина сил Р1, Р2, Р3, Р4 зависит от радиуса, измеряемого от оси О до центров тяжести Ц1 и Ц2. Наибольшая величина радиусов в положении один зубчатых колес 8, а наименьшая в третьем их положении. Наибольшей центробежной силой при каждом обороте вращения зубчатых колес 8 является результирующая сила Р положений зубчатых колес 8 первого и третьего, которая равна: Р=Р1+Р*1-Р3+Р*3. Это основная центробежная сила, которая главным образом приподнимает движитель над опорной поверхностью.
Другой основной силой является сила Т, она направлена перпендикулярно силе Р и перемещает движитель вперед по заданному направлению в момент действия силы Р. Это происходит потому, что и сила Т, как и сила Р, максимальна при максимальном радиусе вращения центра тяжести Ц1 груза 9 зубчатого колеса 8 также в первом положении. Сила Т связана с моментами инерции и парами сил, образованными моментом привода вращения, который выражается действием пар сил, показанных на фиг.3 в четырех положениях зубчатых колес 8: Т1-Т1*, Т2-Т2*, Т3-Т3*, Т4-Т4*, из них силы Т1, Т3 и Т2, Т4 приложены к оси О. Силы Т2 и Т4 численно равны, поэтому уравновешиваются. Силы Т1*, Т3* и Т2*, Т4* приложены к осям 7 и направлены в противоположные стороны, существенного действия на перемещение движителя не оказывают. Известно, что массу с большим моментом инерции труднее привести во вращение, чем с меньшим моментом инерции. Поэтому пара сил момента Т1-Т1* больше пары сил момента Т3-Т3*, где Т=Т1-Т3. Сила Т максимальна, приложена к оси О и действует в горизонтальном направлении. Вращательное движение зубчатых колес 8 в одну сторону по замкнутому кругу без ограничений позволяет увеличивать грузы 9 и повышать угловую скорость вращения зубчатых колес 8. Это повышает силы Р и Т, что соответственно снижает энергозатраты на перемещения движителя, в связи с вращательным движением, повышает его скорость, тяговое усилие и проходимость.
Поворот центрального колеса 4 вокруг оси О сопровождается поворотом оси Ц1-Ц2, исходного положения и основных сил Р и Т, которые, как и ось Ц1-Ц2, занимают наклонное положение между вертикальными и горизонтальными их положениями. При наклонном положении основных сил Р и Т на движитель действуют их проекции силы Р на ось Y, а силы Т на ось X. При поворотах центрального колеса 4 на каждый угол, равный 90 градусов, как показано на фиг.6, 7, силы Р и Т действуют в натуральную величину, при этом их функции по действию на движитель соответственно меняются, сила Т осуществляет подъем движителя, а сила Р его перемещение в заданном направлении. Во всех таких случаях скорость и тяговое усилие в зависимости от угла поворота изменяются. Это создает широкую возможность при рассредоточении указанных сил по сторонам платформы 1, путем установки рам 2 по ее противоположным сторонам, как показано на фиг.4, силам Р и Т или их проекциям, создаваемым в рамах 2, поворачивать движитель в разные стороны и осуществлять его вращение.
Центральное колесо 4 может поворачиваться, например, поворотом рычага, жестко закрепленного на валу 3 под прямым углом (на схемах рычаг не показан), или движением рейки 11 в раме 2, которая поворачивает зубчатое колесо 10 вместе с валом 3 и центральным колесом 4. Вращение зубчатых колес 8 в этих рамах 2 может создаваться от разных приводов вращения или от одного, как показано на фиг.4. В последнем случае передача крутящего момента привода вращения на водила 5 осуществляется через зубчатые колеса 15, связанные с водилами 5, шестерни 16, вал 17 и шкив 18.
Колебания, возникающие от вращения зубчатых колес 8, как в относительном, так и в переносном движениях могут изменяться по частоте в широком диапазоне, поэтому используются для создания дополнительных сил, направленных так же, как и основные силы Р и Т. Это осуществляется взаимодействием аэродинамических поверхностей (панелей 12 и 13), связанных с рамой 2, с воздухом. При движении аэродинамических поверхностей вверх и по ходу перемещения движителя воздух свободно проходит через клапаны 14, расположенные на аэродинамических поверхностях, а при их обратном ходе он перекрывается этими клапанами. В результате образовывается «воздушная опора», которая позволяет создать дополнительные силы, действующие в тех же направлениях, как и основные Р и Т. Колебания рамы 2 используются и при ее взаимодействии с платформой 1 через упругий элемент 19, которая взаимодействует с опорной поверхностью. Упругий элемент 19, направленный вперед, прижимается к платформе 1 и перемещает раму 2 вперед. При движении рамы 2 вверх платформа 1 освобождается от давления и, как упругий элемент 19, занимает исходное положение. Применение упругих элементов 19 целесообразно в случаях, когда масса платформы 1 составляет незначительную часть массы движителя.
Способ перемещения движителя, осуществленный в устройстве, заключается в том, что зубчатые колеса 8 под действием привода вращения вращаются на осях 7, совершая относительное движение и вокруг центрального колеса 4, имеющего, по меньшей мере, одинаковый диаметр с зубчатыми колесами, совершая переносное движение. Между зубчатыми колесами 8 и центральным колесом 4 устанавливается связь, при которой в процессе вращений в относительном и переносном движениях зубчатых колес 8 образуется траектория движения центров тяжести Ц1 и Ц2 их грузов 9, симметричная относительно одной оси Ц1-Ц2 и не симметричная относительно дугой оси, перпендикулярной первой, фиг.5. Такое расположение траектории центров тяжести грузов 9 и оси Ц1-Ц2 составляет исходное положение. Ось Ц1-Ц2 может располагаться вертикально, горизонтально и наклонно. Соответственно располагается и исходное положение с основными силами Р, приподнимающей движитель, и Т, перемещающей его в заданном направлении. При вертикальном положении оси Ц1-Ц2 основные силы совпадают с осями координат: Р с осью Y, а Т с осью X. На фиг.5 также показаны зубчатые колеса 8 в дух положениях, первом и девятом, и грузы 9 в 16 положениях при поворотах водила 5 на 22,5 градуса. Для сравнения, насколько траектория, расположенная выше оси X, больше траектории, расположенной ниже оси X, последняя повторно показана выше оси Х штрихдвухпунктирной линией. По ориентировочному чертежу траектории движения центров тяжести грузов 9 определены размеры радиусов вращения и размеры их вертикальных проекций, характеризующие изменения центробежных сил, приподнимающих движитель.
Положение зубчатых колес 8 и углы поворота водила 5 показаны по ходу его вращения, против часовой стрелки. Отрицательные значения вертикальных проекций, радиусов центров тяжести грузов 9 при поворотах водила 5 означают их расположения ниже оси X. Все указанные данные грузов 9 для положений 10-16 ввиду симметрии повторяются, поэтому не указываются.
Величина центробежных сил определяется формулой: Р=mrω†. В данном случае центробежной силой главным образом является основная сила Р, m - масса груза 9, r - радиус вращения центра тяжести груза 9.
Величина другой силы Т определяется формулами: М=Jε, где М - момент пары сил, J - момент инерции, равный: J=mr†, a ε - угловое ускорение. В данном случае М - момент пары сил, образованный силами Т1-Т*1, в первом положении зубчатых колес 8 и момент пары сил, образованный силами Т3-Т*3, в третьем положении зубчатых колес 8. Сила Т равна: Т=Т1-Т3, где Т1>Т3 в исходном положении, так как радиус вращения центра тяжести г равен ОЦ1 больше радиуса вращения r, равного ОЦ3. Это относится и к моменту инерции J, так как он тоже связан с этими радиусами ОЦ1 и ОЦ3 и в этих же положениях, первом и третьем. Из траектории движения центра тяжести грузов 9 и приведенных формул следует то, что при движении зубчатых колес 8 выше оси Х проекции на ось Y центробежных сил преимущественно направлены вверх, а не вниз и поэтому они приподнимают движитель. Их максимальная величина, это основная сила Р, проявляется в момент образования оси Ц1-Ц2 при прохождении зубчатых колес 8 первого и третьего положений. Аналогично изменяется и момент инерции, так как в этот момент в первом положении зубчатых колес 8 его величина максимальна. Поэтому он оказывает максимальное сопротивление вращению зубчатых колес 8 паре сил привода вращения, от чего и образуется максимальная сила Т, перемещающая движитель в заданном направлении. Ниже оси Х момент инерции значительно меньший, следовательно, сопротивление вращению зубчатых колес 8 меньшее, отсюда и меньшая сила действует на движитель в обратном направлении.
Описанный движитель имеет два зубчатых колеса 8, их может быть разное количество, например 1, 3, 4, это при одинаковом диаметре зубчатых колес 8 и центрального колеса 4. Возможно и разное количество зубчатых колес 8 и неравные диаметры их и центрального колеса 4, при этом центральное колесо 4 может совершать прерывное или непрерывное вращение вокруг своей оси О или повороты с постоянной или переменной скоростью. Во всех этих вариантах главным является при каждом обороте вращения зубчатых колес 8 образование момента инерции с максимальной величиной (для образования силы Т) во время действия центробежных сил, направленных вверх. Однако если даже и окажется в каких-либо вариантах движителя равенство центробежных сил (проекций на вертикальную ось), направленных вверх и вниз (знак --), то движитель все равно будет перемещаться по опорной поверхности. Платформа 1 силами, направленными вниз, прижимается к опорной поверхности как к упору. Работа, равная силе, умноженной на перемещение, этих сил равна нулю, так как перемещение равно нулю. А для сил, направленных вверх, упора нет, они приподнятием движителя совершают работу, поэтому движитель перемещается при любых силах, кратковременно направленных вниз, за один оборот вращения зубчатых колес 8.
Таким образом, снижение энергозатрат на перемещение движителя, повышение его скорости, тягового усилия, проходимости и маневренность достигаются следующими отличительными признаками.
1. Установлением вала в раме с центральным зубчатым колесом, связанным с зубчатыми колесами с грузами, расположенными на осях водила, установленного на валу и связанного с приводом вращения. При этом диаметры центрального колеса и зубчатых колес с грузами, по меньшей мере, одинаковы. В исходном положении центры тяжести грузов зубчатых колес располагаются противоположно на радиальной оси центрального колеса и на максимальном и минимальном расстоянии от оси их вращения. Это позволяет путем увеличения грузов зубчатых колес и повышения их угловой скорости вращения снижать энергозатраты на перемещение движителя, повышать его скорость, тяговое усилие и проходимость.
2. Переносное движение зубчатых колес с грузами движителя осуществляется вращением, так же как и их относительное движение. В результате такого способа движений образуется траектория центров тяжести грузов зубчатых колес, симметричная относительно одной оси и не симметричная относительно другой перпендикулярной ей оси. Это позволяет образовать основные силы и направить их действие в одно время на подъем движителя и на перемещение его в заданном направлении.
3. Поворотами центрального колеса осуществляется изменение направления и величины сил, действующих на движитель, а рассредоточением этих сил по сторонам платформы движителя осуществляется их действие с двух сторон. Это позволяет движителю маневрировать, то есть осуществлять повороты в разные стороны и вращение.
4. Колебания движителя, возникающие от вращения зубчатых колес с грузами, могут составлять широкий диапазон, поэтому он взаимодействует через аэродинамические поверхности с воздухом, а через упругие элементы с опорной поверхностью. Это позволяет создавать дополнительные силы, направленные по действию основных сил, и снижать колебания движителя.
Область применения движителя по сравнению с движителями такого типа расширяется в связи со снижением энергозатрат на перемещение, повышением скорости, тягового усилия, проходимости и маневренностью. Возможность существенного увеличения грузов зубчатых колес и повышение их угловой скорости вращения, которая в формуле центробежной силы стоит в квадрате, а в моменте инерции радиус в квадрате, могут создавать большую подъемную силу и скорость при перемещении движителя по опорной поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ | 2007 |
|
RU2344961C1 |
| ДВИЖИТЕЛЬ И СПОСОБ ЕГО ПЕРЕМЕЩЕНИЯ | 2014 |
|
RU2572506C2 |
| ДВИЖИТЕЛЬ | 2004 |
|
RU2288858C2 |
| ДВИЖИТЕЛЬ И СПОСОБ ЕГО ПЕРЕМЕЩЕНИЯ | 2012 |
|
RU2550410C2 |
| РОТОРНО-ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2021 |
|
RU2772831C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2338906C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2006 |
|
RU2347923C2 |
| Гусеничный транспортер | 2023 |
|
RU2798887C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2018 |
|
RU2693948C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2282734C2 |
Изобретение относится к транспортным средствам, а именно к движителям. Движитель содержит платформу, взаимодействующую с опорной поверхностью. На платформе установлены рама, зубчатые колеса с грузами, расположенными на осях водила, и привод вращения. В раме установлен вал с центральным зубчатым колесом, связанным с упомянутыми зубчатыми колесами с грузами. Центральное зубчатое колесо и зубчатые колеса с грузами имеют одинаковый диаметр. Центры тяжести грузов располагаются на радиальной оси центрального зубчатого колеса на максимальном и минимальном расстоянии от его оси вращения. Техническим результатом является повышение скорости, тягового усилия и проходимости движителя. 2 н. и 3 з.п. ф-лы, 7 ил.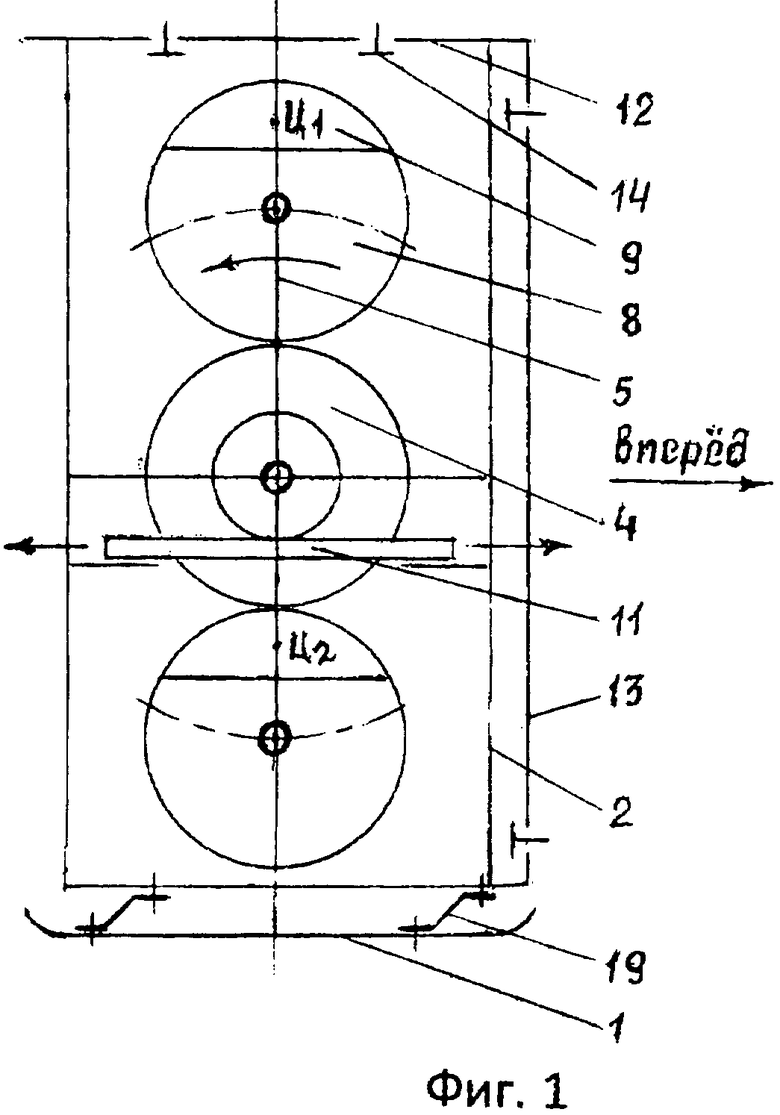
1. Движитель, содержащий платформу, взаимодействующую с опорной поверхностью, установленную на ней раму, зубчатые колеса с грузами, расположенными на осях, и привод вращения, отличающийся тем, что в раме установлен вал с центральным зубчатым колесом, связанным с зубчатыми колесами с грузами, расположенными на осях водила, установленного на валу и связанного с приводом вращения, при этом центральное зубчатое колесо, по меньшей мере, имеет одинаковый диаметр с зубчатыми колесами с грузами, центры тяжести грузов которых в исходном положении располагаются противоположно на радиальной оси центрального зубчатого колеса на максимальном и минимальном расстояниях от оси его вращения.
2. Способ перемещения движителя, взаимодействующего с опорной поверхностью, включающий переносное движение зубчатых колес с грузами и их относительное вращательное движение от привода вращения, отличающийся тем, что зубчатые колеса с грузами в переносном движении совершают вращение, которое вместе с относительным вращением образует траекторию центров тяжести грузов зубчатых колес, симметричную относительно одной оси центрального зубчатого колеса, на которой располагаются противоположно центры тяжести грузов зубчатых колес на максимальном и минимальном расстояниях от оси его вращения, и несимметричную относительно другой оси, перпендикулярной первой.
3. Способ по п.2, отличающийся тем, что поворотами или вращением центрального зубчатого колеса и установкой рам по ее противоположным сторонам осуществляются повороты движителя в разные стороны и его вращение.
4. Способ по п.2, отличающийся тем, что колебаниями движителя, возникающими от вращения зубчатых колес с грузами, через взаимодействия аэродинамических поверхностей с воздухом создаются дополнительные силы, направленные по действию основных сил.
5. Способ по п.2, отличающийся тем, что колебаниями движителя, возникающими от вращения зубчатых колес с грузами, через упругие элементы, расположенные на платформе, создаются дополнительные силы, направленные по действию основных сил.
| ЦЕНТРОБЕЖНО-СИЛОВОЙ ДВИЖИТЕЛЬ (ВАРИАНТЫ) | 2001 |
|
RU2223192C2 |
| US 2009318256 A1, 24.12.2009 | |||
| DE 102008021589 A1, 02.06.2010 | |||
| JP 60183271 A, 18.09.1985. | |||

