Изобретение относится к транспортной технике, в частности к движителям транспортных средств высокой проходимости.
Известен движитель (см. А.Ф.Крайнев. Словарь - справочник по механизмам, стр.47-48. "Машиностроение", Москва, 1987 г.- аналог). В этом движителе на стойке платформы наклонно, в сторону движения, установлен подпружиненный маятник с кривошипом на конце. Расположение кривошипа на маятнике в процессе его вращения создает колебания маятника, при этом происходит изменение его момента инерции из-за изменения центра тяжести. Однако наклонное расположение маятника не позволяет непосредственно колебаниями маятника перемещать платформу и эффективно сочетать изменение момента инерции маятника с действующими силами. Поэтому в заданном направлении устойчивого движения, скорости, тягового усилия не образуется.
Эти недостатки исключаются в движителе (см. патент RU 2288858 С2, МПК B62D 57/00 (2006.01), F03G 3/00 (2006.01) - прототип). Движитель содержит платформу, подпружиненный маятник с бойком, сектор колебания которого расположен в плоскости движения. На платформе движителя закреплена рама, на ее стойках установлены упоры, на маятнике расположен шкив с кривошипом, который предназначен для вращения от шкива привода. Боек на маятнике установлен с возможностью взаимодействия, по меньшей мере, с одним упором. Маятник через пружины связан со стойками рамы в плоскости его колебаний, а осевая линия сектора колебаний колебательного элемента расположена перпендикулярно направлению движения. В этом движителе перемещение платформы в заданном направлении осуществляется непосредственно движением маятника в моменты, когда платформа приподнята и при максимальной угловой скорости движения маятника, поэтому возрастает скорость движения, тяговое усилие и снижаются энергозатраты на перемещение. Однако в этом движителе передача тягового усилия от маятника к платформе осуществляется через пружины. Это не позволяет стабильно и в полной мере использовать каждый цикл колебаний маятника для перемещения платформы движителя из-за отсутствия жесткой связи между маятником и стойками рамы. Возможны несовпадения действий горизонтальных сил, перемещающих платформу, и вертикальных сил, приподнимающих ее в эти моменты. Такие несовпадения могут быть, например, при резком изменении частоты вращения привода или при большом наклоне платформы. Результатом таких несовпадений являются снижение скорости движения, тягового усилия и повышение энергозатрат на перемещение движителя.
Задачей изобретения является снижение энергозатрат на перемещение, повышение скорости и тягового усилия.
Задача достигается тем, что движитель содержит платформу, установленную на ней раму с закрепленной осью. Рама установлена вертикально на платформе, а на оси установлены маятник и привод вращения. Сектор колебания маятника расположен в плоскости движения. Привод вращения связан цепными передачами с кривошипом, расположенным на маятнике, и приводом колебаний маятника, выполненным в виде кривошипно-шатунного механизма. Ось колебаний маятника закреплена на раме между платформой и кривошипом. Связь маятника с рамой через кривошипно-шатунный механизм позволяет каждый цикл колебаний маятника использовать в полной мере для движения платформы, а также обеспечивает стабильное совпадение моментов действия горизонтальной силы, двигающей платформу в заданном направлении, и вертикальной силы, приподнимающей ее и снижающей сопротивление перемещения движителя по опорной поверхности. Вертикальная сила, приподнимающая платформу, создается тем, что ось колебания маятника закреплена на раме между платформой и кривошипом.
Задача достигается и тем, что на оси колебаний маятника установлен кривошип, связанный с приводом вращения, а также цепной передачей с кривошипно-шатунным механизмом и зубчатой передачей с кривошипом, расположенным на маятнике. Это повышает усилие, перемещающее движитель по опорной поверхности, а вертикальная сила, приподнимающая платформу движителя, создается грузом, установленным на кривошипно-шатунном механизме.
Шарнир, связывающий шатун с маятником, выполненный подвижно на маятнике, позволяет в широком диапазоне изменять скорость и тяговое усилие в обратно пропорциональной зависимости.
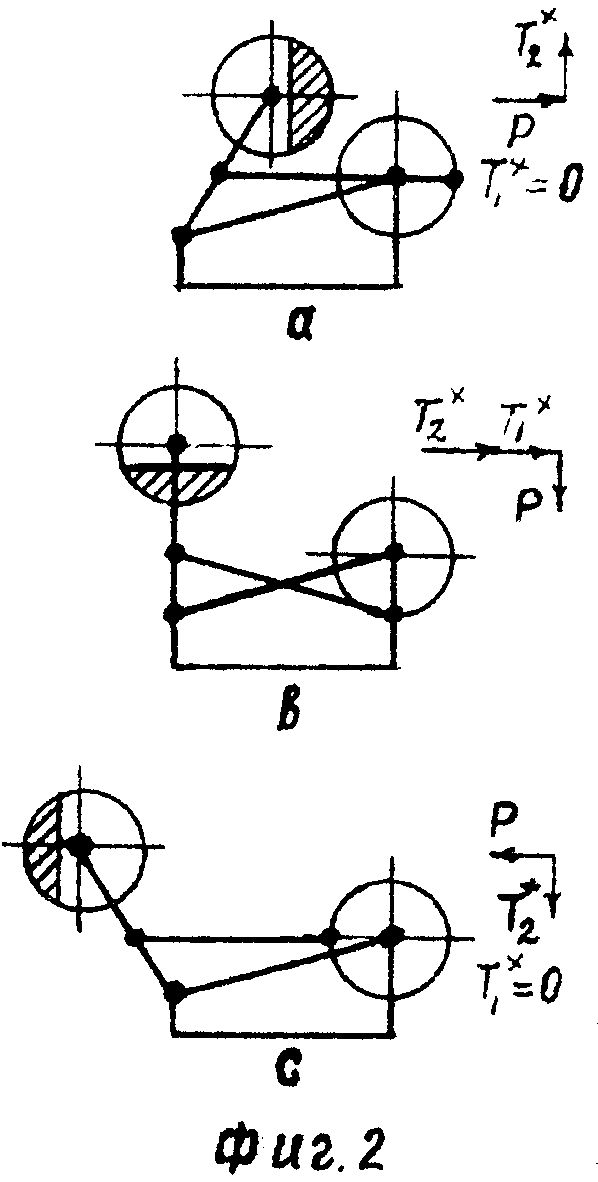
На фиг.1 и 3 изображены схемы движителей, в которых приводы колебаний маятников выполнены кривошипно-шатунными механизмами.
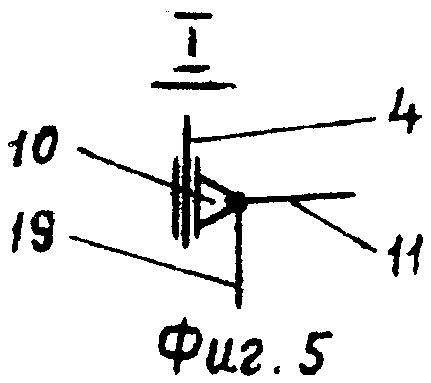
Вращение передается цепными передачами и зубчатой передачей. На фиг.2 и 4 изображены упрощенные схемы. На фиг.1, 3 стрелками показаны направления вращения кривошипов, кривошипно-шатунного механизма и направление перемещения движителей вперед, стрелками также показаны основные действующие силы на всех схемах. На фиг.5 изображена схема узла связи маятника с шатуном через подвижный шарнир.
Движитель фиг.1 содержит платформу 1, согнутую по краям, на которой вертикально закреплена рама 2, выполненная из проката в виде неравнобокой трапеции. На короткой стороне рамы 2 закреплена ось 3 колебания маятника 4 с двойной звездочкой 5, связанной с приводом вращения, привод вращения на чертеже не показан. На другом конце маятника 4 на оси 6 установлен кривошип 7 с грузом 8 и со звездочкой 9. Маятник 4 в средней части через шарнир 10, шатун 11, ось 12 связан с кривошипно-шатунным механизмом 13 со звездочкой 14, установленными на оси 15, закрепленной на длинной стороне рамы 2. Двойная звездочка 5 связана со звездочками 9 и 14 цепями соответственно 16 и 17. По параметрам все звездочки одинаковы. Основные силы, направленные против движения T1, T2, в сторону движения соответственно Т1*, T2* и центробежная сила Р. Другие силы, приложенные к маятнику 4 и к оси 3, в том числе связанные с силой Т1, не учитываются и на чертеже фиг.1 не показаны. На фиг.2 показаны на схеме "а" - крайнее правое положение маятника 4 с кривошипом 7 с грузом 8. На схеме "в" -среднее положение маятника 4 с кривошипом 7 с грузом 8 при ходе маятника 4 влево. На схеме "с" - крайнее левое положение маятника 4, кривошипа 7 с грузом 8.
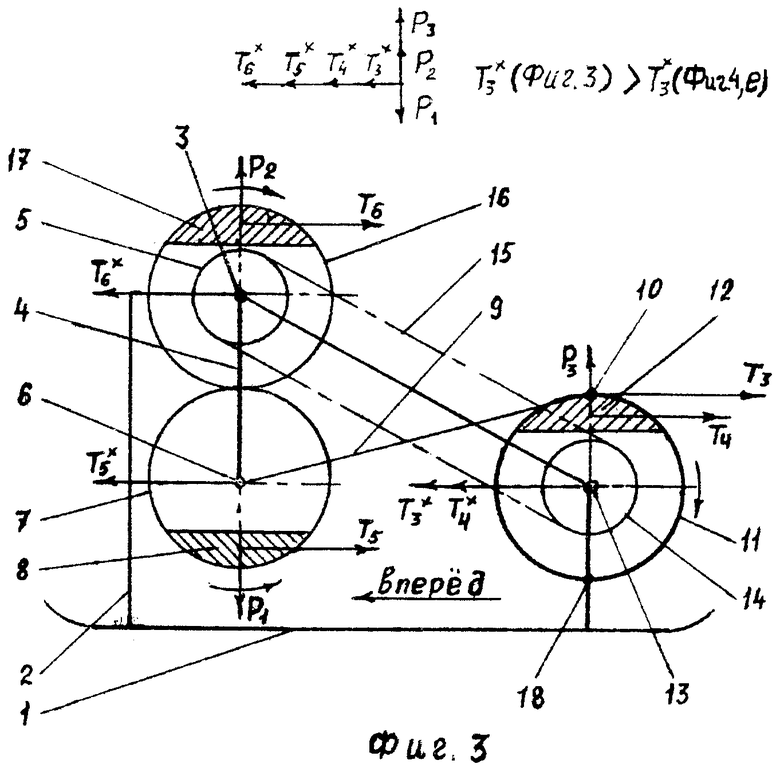
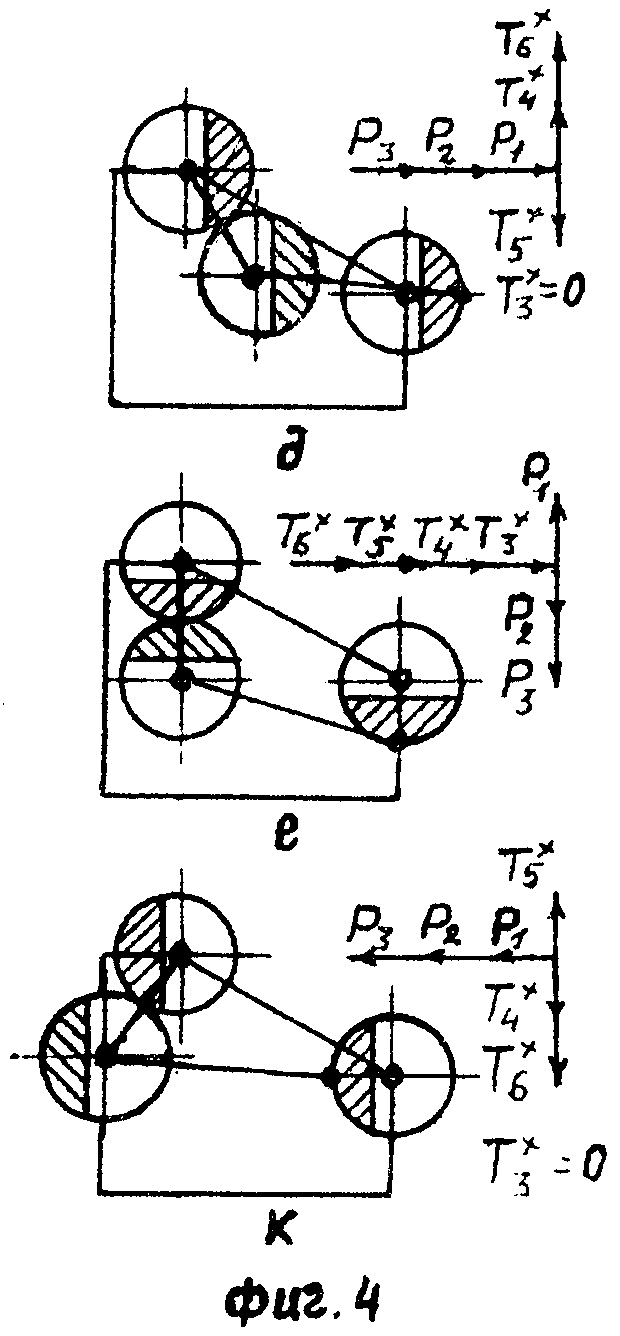
На фиг.3 на платформе 1 с загнутыми краями закреплена рама 2, выполненная из проката в виде усеченной трапеции. На длинной стороне рамы 2 закреплена ось 3 колебания маятника 4, на ней установлена звездочка 5, связанная с приводом вращения, привод вращения на чертеже не показан. Между платформой 1 и осью 3 на другом конце маятника 4 закреплена ось 6. На этой оси 6 установлен кривошип 7 с грузом 8. Маятник 4 через ось 6, шатун 9, ось 10 связан с кривошипно-шатунным механизмом 11, который выполнен с грузом 12, установленным на оси 13, закрепленной на короткой стороне рамы 2. Кривошипно-шатунный механизм 11 через связанную с ним звездочку 14, цепь 15, звездочку 5 связан с кривошипом 16 с грузом 17, установленным на оси 3. Кривошипы 7 и 16 снабжены зубьями, образующими зубчатую передачу. Силы Т3, Т4, Т5, Т6, направлены против движения, а по направлению движения направлены соответственно силы Т3*, Т4*, Т5*, Т6* из них Т3*, Т4*, Т6* приложены к раме 2 на осях 3 и 13, и центробежные силы P1, P2 и Р3. На фиг.4 показаны на схеме "д" - крайнее правое положение маятника 4 с кривошипом 7 и грузы 8, 12, 17. На схеме "е" - среднее положение маятника 4 с кривошипом 7 и грузы 8, 12, 17 при ходе маятника 4 влево. На схеме "к" - крайнее левое положение маятника 4 с кривошипом 7 и грузы 8, 12, 17. На кривошипно-шатунном механизме 13 фиг.1 и 11 фиг.3 закреплены оси 18 диаметрально осям соответственно 12 и 10. На оси 18 могут переставляться шатун 11 фиг.1 и шатун 9 фиг.3.
Работает движитель следующим образом. Устанавливается груз 8 кривошипа 7 в верхнее положение при вертикальном положении маятника 4 и верхнем положении оси 12 на кривошипно-шатунном механизме 13, как показано на фиг.1. Включается привод вращения по стрелке. Звездочка 5 начинает вращаться и через цепные передачи, включающие цепи 16, 17 и звездочки 9, 14, вращает кривошип 7 и кривошипно-шатунный механизм 13, который через шарнир 10, шатун 11, ось 12 приводит в колебание маятник 4 вместе с кривошипом 7 и грузом 8. Все циклы колебания одинаковые, каждый из них при ходе маятника 4 вправо последовательно проходит положения фиг.2 крайне левое "с", среднее фиг 1, и "а" крайне правое. При ходе маятника 4 влево, наоборот, положения "а", среднее "в" и заключительное положение цикла "с". При колебаниях маятника 4, вращении кривошипа 7 с грузом 8 и кривошипно-шатунного механизма 13 возникают силы Т1 и Т2 (на чертежах показаны горизонтальные проекции основных сил), направленные против движения фиг.1 и их реакции Т1*, и Т2*, направленные по ходу движения. Сила Т1* приложена к раме 2 и через нее передает усилие на платформу 1. Горизонтальные проекции сил в средних положениях максимальные, потому что они равны их натуральным величинам. Сила Т1*, направленная вперед, существенно превышает эту же силу Т1 *, направленную назад, против движения. Так как груз 8 кривошипа 7 при движении вперед фиг.1 расположен вверху, момент инерции маятника 4 при таком положении его максимальный. При движении назад, положение "в", фиг.2, груз 8 расположен внизу, момент инерции маятника 4 минимальный. Величина силы Т1 и ее реакция Т1* зависят от сопротивления движению маятника 4, с увеличением сопротивления возрастает и, наоборот, с уменьшением убывает. Величина сопротивления складывается из сопротивления, создаваемого моментом инерции, который при таком движении маятника 4 вправо максимальный, и сопротивления, создаваемого силой Т2*. Величина ее изменяется одинаково, что влево, что вправо, и направлена против движения маятника 4. Вертикальная проекция силы Р в положении фиг.1 максимальная. С таким усилием сила Р приподнимает платформу 1 через ось 6, маятник 4, ось 3 и раму 2, а сила Т1* перемещает ее вперед. При движении маятника 4 в обратном направлении, влево, положение "в", фиг.2 сумма указанных сопротивлений минимальная из-за минимальной величины момента инерции, сила Т1* с минимальной силой действует через раму 2 на платформу 1 вправо. Такому действию препятствует центробежная сила Р, которая с максимальной величиной прижимает платформу 1 к опорной поверхности и препятствует ее перемещению назад.
В движителе фиг.3 звездочка 5 от привода вращения крутящий момент передает через цепь 15, звездочку 14 кривошипно-шатунному механизму 11, который через ось 10, шатун 9, ось 6 создает колебания маятнику 4, а вращение кривошипа 7 осуществляется зубчатой передачей. До включения привода вращения грузы устанавливаются на кривошипе 16 и кривошипно-шатунном механизме 11 вверху, а на кривошипе 7 внизу, как показано на фиг.1. Цикл колебания маятника 4 включает положения при движении вправо, крайне левое "к", среднее фиг.3, крайне правое "д" и при движении влево наоборот положения "д", "е", и "к". Силы, фиг.3, направленные против движения вперед Т3, Т4, Т5, и Т6, направленные по ходу движения Т3*, Т4*, Т5*, Т6*, из них к раме 2 приложены силы Т3*, Т4* и Т6*, их наибольшее действие через раму 2 на платформу 1 создается в средних положениях фиг.3 и фиг.4, "е", так как горизонтальные проекции сил в таких положениях равны их натуральным величинам. Момент инерции маятника 4 в нижнем положении груза 8 фиг.3 больший, чем в положении "е" фиг.4. Общее сопротивление, препятствующее движению маятника 4 вправо, увеличивающее силу Т3, ее реакцию Т3*, образуется от увеличения момента инерции маятника 4 и действия силы Т5* против его движения. В этот период движения маятника 4 вправо центробежные силы Р1 и Р2 уравновешиваются, а сила Р3 с максимальной величиной приподнимает платформу 1. Сила Т3* вместе с силами Т4* и Т6* с минимальным сопротивлением перемещают платформу 1 вперед. При движении маятника 4 влево и прохождении среднего положения "е", фиг.4, общее сопротивление, связанное с моментом инерции маятника 4 и действием силы Т5*, направленной против движения маятника 4 минимальное из-за минимального момента инерции. Сопротивление движению низкое, следовательно, и низкая величина силы Т3*, направленной вправо. Центробежные силы Р1 и Р2 направлены в разные стороны, существенного действия на платформу 1 не оказывают. Центробежная сила Р3 направлена вниз, прижимает платформу 1 к опорной поверхности и препятствует силам Т3*, Т4*, и Т6* перемещать платформу вправо, назад. В крайних положениях "д" и "к" фиг.4 силы направлены в противоположные стороны. Следовательно, результирующим перемещением движителей как на фиг.1, так на фиг.3 является стабильное движение вперед с повышенной скоростью, тяговым усилием и пониженными энергозатратами.
При малых оборотах вращения привода, когда сила трения платформы 1 по опорной поверхности превышает силы, перемещающие движитель, то он не перемещается.
Изменение направления перемещения движителей осуществляется или изменением направления вращения их приводов или перестановкой шатунов 4 на оси 18 с оси 12 фиг.1 и с оси 10 фиг.3.
Установка подвижного шарнира 10 вместо неподвижного шарнира фиг.5, связывающего маятник 4 с шатуном 11, позволяет при перемещении его тягой 19 по шатуну 4 в сторону оси 6 замедлять скорость движения платформы 1 и увеличивать тяговое усилие. При движении его в обратную сторону по маятнику 4 к оси 3 наоборот увеличивать скорость перемещения и снижать тяговое усилие. Подвижный шарнир фиг.5 может устанавливаться и на маятник 4 фиг.3, который при необходимости может быть удлинен вниз для расположения подвижного шарнира 10 ниже оси 6 с тем, чтобы больше расширить диапазон изменения скорости и тягового усилия.
Маятник 4 с кривошипом 7 может быть расположен также вертикально и выше кривошипа 16. В этом случае кривошипно-шатунный механизм 11 будет соответственно располагаться выше, а короткая сторона рамы 2 удлинится.
Таким образом, выполнение привода колебаний маятника в виде кривошипно-шатунного механизма и связь привода вращения с ним и с кривошипом, расположенным на маятнике, цепными передачами позволяют стабильно использовать каждое колебание маятника для перемещения движителя, в том числе и при наклонном его положении. Расположение оси колебаний маятника между платформой и кривошипом позволяет приподнимать платформу и перемещать ее в сторону движения с минимальным сопротивлением.
Расположение кривошипа на оси колебаний маятника, связь его с кривошипом, расположенным на маятнике зубчатой передачей, позволяет увеличить силы, действующие на движитель. Установление груза на кривошипно-шатунном механизме обеспечивает перемещение платформы движителя по опорной поверхности в заданном направлении с минимальным сопротивлением. В полной мере стабильно используется каждое колебание маятника для перемещения движителя, как по горизонтальной, так и по наклонной поверхности с пониженным сопротивлением движения. От этого в движителях фиг.1, 2 и фиг.3, 4 повышаются и скорость, и тяговое усилие, а энергозатраты, снижаются.
Подвижное выполнение шарнира на маятнике, связанного через шатун с кривошипно-шатунным механизмом, позволяет в широком диапазоне изменять скорость и тяговое усилие движителя в процессе его движения. Область применения такого движителя по отношению к движителям такого класса расширяется, например, в использовании его на болотистых, пахотных местах, в строительстве дорог для выравнивания грунта. В сельском хозяйстве при вспашке полей и посеве зерновых культур. В железнодорожных составах в начальный момент движения с места и так далее.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ И СПОСОБ ЕГО ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2460661C2 |
| ДВИЖИТЕЛЬ | 2004 |
|
RU2288858C2 |
| ДВИЖИТЕЛЬ И СПОСОБ ЕГО ПЕРЕМЕЩЕНИЯ | 2014 |
|
RU2572506C2 |
| ДВИЖИТЕЛЬ И СПОСОБ ЕГО ПЕРЕМЕЩЕНИЯ | 2012 |
|
RU2550410C2 |
| Способ создания три и "3+" тактных поршневых ДВС с видоизмененным кривошипно-шатунным механизмом и осуществление способа. | 2013 |
|
RU2618640C2 |
| РОТОРНО-ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2021 |
|
RU2772831C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ОБРАЗЦА МАТЕРИАЛА НА УСТАЛОСТЬ | 1991 |
|
RU2029282C1 |
| Привод стана холодной прокатки труб | 1987 |
|
SU1533789A1 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1983 |
|
SU1132167A2 |
| ВЕЛОСИПЕДНОЕ УСТРОЙСТВО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 1998 |
|
RU2223885C2 |
Изобретение относится к транспортным средствам высокой проходимости. Движитель содержит платформу, установленную на ней раму, ось колебания маятника с кривошипом, закрепленную на раме. Сектор колебаний маятника расположен в плоскости движения. Ось колебаний маятника расположена между платформой и кривошипом. Привод колебаний маятника выполнен в виде кривошипно-шатунного механизма. Приводы вращения кривошипа, расположенного на маятнике, и кривошипно-шатунного механизма выполнены в виде цепной передачи и связаны с приводом вращения, расположенным на оси колебаний маятника. В другом варианте движителя на оси колебаний маятника установлен кривошип, связанный с кривошипом, расположенным на маятнике, зубчатой передачей, и связанный с приводом вращения. Привод вращения связан передачей, выполненной в виде цепной, с приводом колебаний маятника, выполненным в виде кривошипно-шатунного механизма, снабженного грузом. В обоих вариантах исполнения движителя связь шатуна с маятником может быть выполнена в виде подвижного шарнира. Снижаются энергозатраты на перемещение, повышается скорость и тяговое усилие. 2 з.п. ф-лы, 5 ил.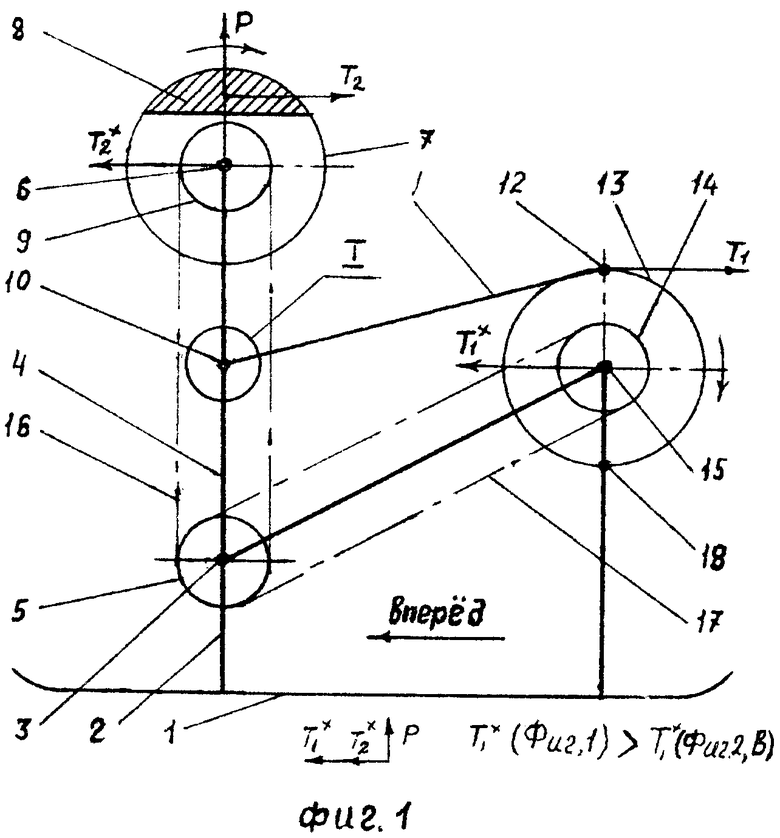
| ДВИЖИТЕЛЬ | 2004 |
|
RU2288858C2 |
| ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ УСТРОЙСТВА | 2005 |
|
RU2293037C1 |
| US 5831354 А, 03.11.1998 | |||
| US 6345789 В1, 12.02.2002. | |||

