Изобретение относится к транспортной технике, в частности к движителям транспортных средств высокой проходимости.
Известен движитель (см. патент RU 2.344961 С1, МПК, B62D00 57/00 (2006.01), F03G 3/00 (2006.01) - аналог). Этот движитель содержит платформу, установленную на ней раму, ось колебания маятника, закрепленную на раме. На оси колебаний маятника расположен кривошип, связанный зубчатой передачей с зубчатым колесом с эксцентрично расположенным грузом, установленным на маятнике. При этом привод вращения снабжен эксцентрично расположенным грузом и связан с кривошипом передачей, выполненной в виде цепной, а с маятником передачей, выполненной в виде кривошипно-шатунного механизма. В этом движителе с увеличением угловой скорости привода вращения увеличивается частота колебаний маятника, следовательно, увеличиваются скорости, ускорения и связанные с ними силы, ограничивающие повышение угловой скорости вращения, что существенно снижает и силы, перемещающие движитель.
Известен центробежный движитель (см. патент США 5937698, F03G 3/00 (2006.01.01) - прототип). Этот движитель содержит платформу с осью, подвижно связанную со шкивом, который через ременную передачу связан со шкивом привода вращения, расположенного на раме, установленной на платформе. Шкив при вращении на оси образует центробежную силу, которая через ременную передачу обеспечивает движение платформы в заданном направлении.
Недостатками этого движителя являются подвижная связь шкива с осью, что усложняет конструкцию и создает колебания шкива относительно оси в плоскости шкива в процессе его вращения. Это ограничивает возможность увеличения угловой скорости его вращения и тем самым снижает центробежную силу. Передача центробежной силы, обеспечивающей перемещение центробежного движителя, через ременную передачу и изменения натяжения ремня в передаче снижает КПД ременной передачи и ее износ из-за повышенного проскальзывания ремня на шкивах. Кроме того, горизонтальное расположение шкива относительно платформы исключает возможность поднятия платформы в момент, когда платформа перемещается вперед. Отсутствие аэродинамических поверхностей с клапанами, взаимодействующими с окружающей средой, в этом центробежном движителе исключают возможность образования дополнительных сил, перемещающих вперед платформу. Следовательно, уменьшаются скорость перемещения, тяговое усилие и повышаются энергозатраты на перемещение центробежного движителя.
Задачей изобретения является повышение скорости, тягового усилия и снижение энергозатрат на перемещение движителя.
Задача достигается тем, что:
1. Движитель снабжен аэродинамическими поверхностями с клапанами, взаимодействующими с окружающей средой.
2. Взаимодействием аэродинамических поверхностей с окружающей средой обеспечивается перемещение движителя вперед.
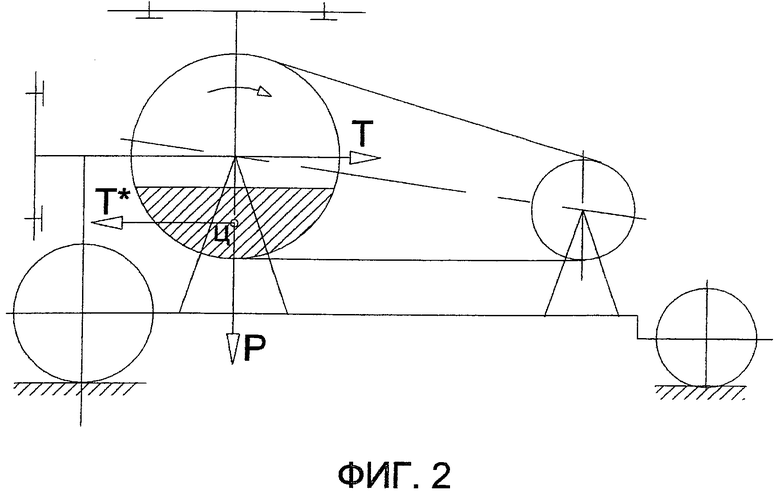
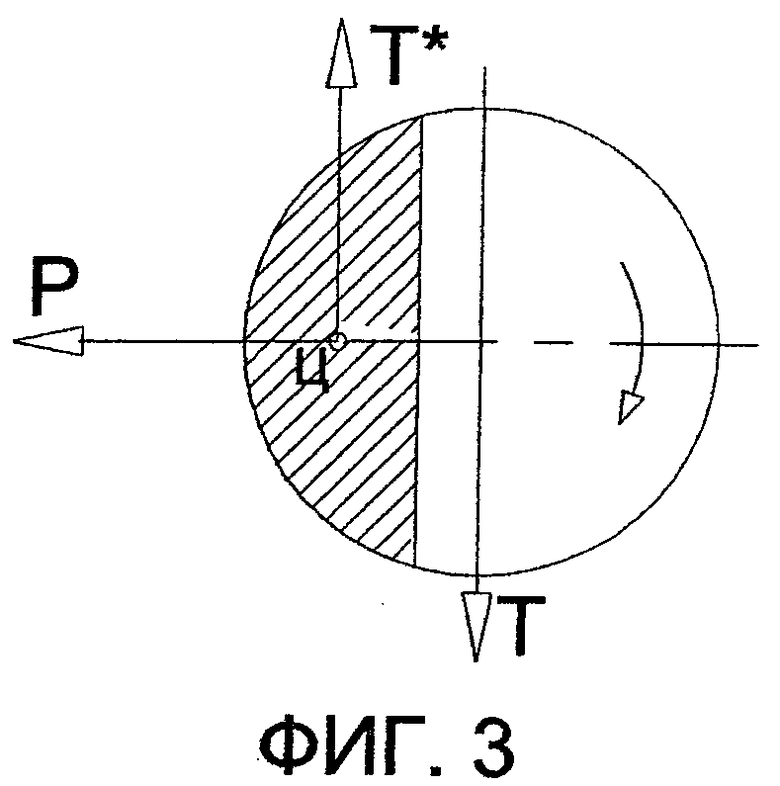
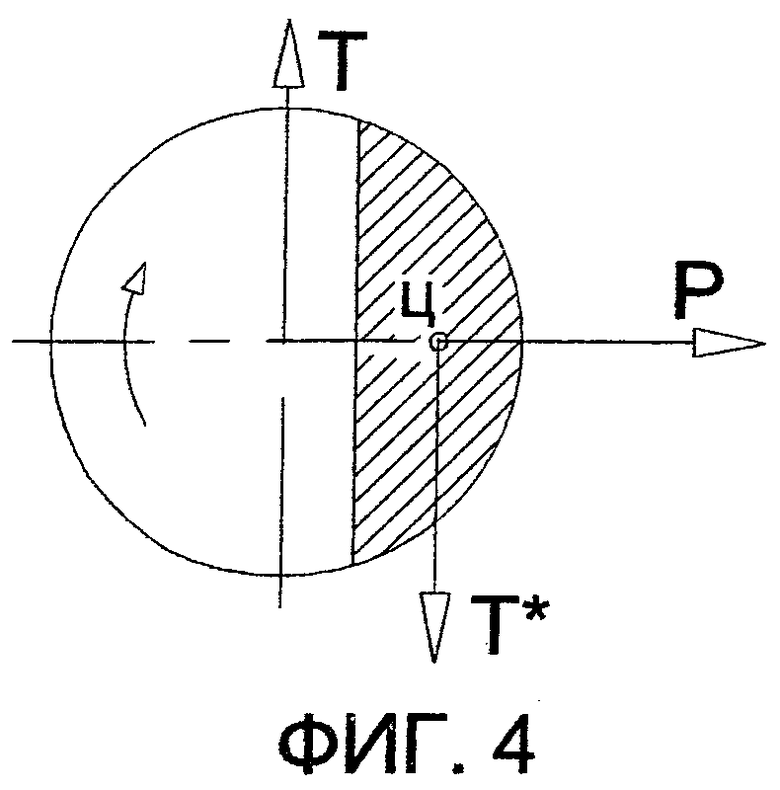
На фиг. 1 изображен движитель фиг. 1 и на фиг. 2 - с расположением грузов соответственно вверху и внизу. На фиг. 3 и 4 показан его шкив с грузом, расположенный соответственно с левой и правой стороны. На всех чертежах показано направление вращения шкива с грузом, центр тяжести груза Ц и все силы Р, Т* и Т. На фиг. 1 показано направление перемещения движителя.
Движитель содержит платформу 1, на которой непосредственно закреплена ось 2 (фиг. 1). Груз 3 эксцентрично расположен на шкиве 4, который установлен на оси 2. Шкив 4 через ременную передачу 5 связан со шкивом 6 привода вращения, установленного на платформе 1 (привод вращения на чертеже не показан). Платформа 1 расположена на колесах 7 и 8. На ригелях и стойках, выполненных из проката, установлены аэродинамические поверхности: вертикальная 9, расположенная перпендикулярно заданному направлению перемещения движителя, и горизонтальная 11, расположенная параллельно плоскости его платформы 1. На аэродинамических поверхностях 9 и 10 расположены клапаны 11. Груз 3 (фиг. 1-4) расположен в характерных положениях, соответственно, в верхнем, нижем, в крайне левом и в крайне правом. В этих положениях все силы равны их натуральным величинам. В остальных промежуточных положениях груза 3 вертикальная составляющая каждой силы равна произведению натуральной величины силы на синус угла ее наклона, а горизонтальная составляющая равна произведению натуральной величины силы на косинус ее угла наклона.
Работает движитель следующим образом. Раскручивается шкив 6 привода вращения и через ременную передачу 5 шкив 4 с эксцентрично расположенным грузом 3 (шкив с грузом) по указанной стрелке. Крутящий момент привода вращения на шкиве 4 с грузом образует пару сил Т и Т*, из которых сила Т приложена к оси 2 вращения шкива 4 с грузом 3, а сила Т*, приложенная к центру тяжести Ц груза 3 (фиг. 1). К этому же центру тяжести Ц радиально приложена и центробежная сила Р, которая возникает от вращения груза 3. Под действием главным образом сил Т и Р платформа 1 взаимодействует с опорной поверхностью ее колесами 7 и 8. В верхнем положении груза 3 (фиг. 1) центробежная сила Р направлена вверх, поэтому она приподнимает платформу 1 с колесами 7 и 8 движителя относительно опорной поверхности через ось 2 и ее стойки. Сила Т приложена к оси 2 и направлена в сторону движения, поэтому перемещает движитель вперед. В нижнем положении груза 3 (фиг. 2) сила Т движитель перемещает назад, однако сила Р направлена вниз и тормозит такое перемещение. При крайне левом положении груза 3 сила Р (фиг. 3) перемещает движитель вперед, а сила Т тормозит такое перемещение, прижимая колеса 7 и 8 к опорной поверхности. В крайне правом положении груза 3 (фиг. 4) сила Р перемещает движитель назад, а сила Т приподнимает его вверх, от чего образуется импульс его перемещения назад. Сила Т*, приложенная к центру тяжести Ц груза 3, поэтому существенного действия на перемещение движителя не оказывает. Превышение перемещения вперед (фиг. 1) по отношению к импульсу перемещения назад фиг. 4 и возможного перемещения назад (фиг. 2) создает аэродинамическая поверхность 9. Эта аэродинамическая поверхность 9 не препятствует перемещению движителя вперед, так как клапаны 11 на ней при таком движении пропускают воздух, а при обратном движении клапаны 11 закрываются и аэродинамическая поверхность 9 тормозит движение назад. Аналогично действует и аэродинамическая поверхность 10, которая при движении ее вверх движется свободно, а при движении вниз создает сопротивление, которое увеличивает приподнятое положение движителя относительно опорной поверхности. Движение аэродинамических поверхностей 9 и 10 осуществляется колебаниями, возникающими от вращения шкива 4 с грузом 3. Такие движения аэродинамических поверхностей 9, 10 и колебания не могут значительно ограничить вращение шкива 4 с грузом 3, потому что он расположен непосредственно на платформе и связан только с приводом вращения, поэтому его угловая скорость вращения может существенно возрастать. А так как величина центробежной силы Р в квадрате зависит от угловой скорости, то может увеличиться диапазон колебаний аэродинамических поверхностей 9 и 10 и действия сил, приподнимающих и перемещающих движитель вперед. Как следствие, повысятся скорость перемещения движителем транспортного средства, проходимость и понизятся энергозатраты на его перемещение.
Возможность большего приподнятия платформы 1 относительно опорной поверхности позволит движителем перемещать транспортное средство как с колесами на платформе 1, так и без них с повышенной проходимостью по опорной поверхности. Преимущество платформы 1 на колесах в том, что коэффициент трения качения значительно меньше трения скольжения, где сила трения качения прямо пропорциональна нормальному давлению между катящимися поверхностями и обратно пропорциональна радиусу катящегося тела.
Таким образом, повышение скорости, тягового усилия, снижение энергозатрат на перемещение движителя достигаются следующими отличительными признаками.
1. Движитель снабжен аэродинамическими поверхностями с клапанами, взаимодействующими с окружающей средой и обеспечивающими движение вперед платформы.
2. Взаимодействием аэродинамических поверхностей с окружающей средой, обеспечивающим перемещение движителя вперед.
В целом сочетанием приводного шкива, связанного осью с платформой, обеспечивающего движение ее за счет центробежной силы, увеличивается аэродинамическими поверхностями, которые взаимодействием с окружающей средой тоже перемещают движитель вперед.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ И СПОСОБ ЕГО ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2460661C2 |
| ДВИЖИТЕЛЬ И СПОСОБ ЕГО ПЕРЕМЕЩЕНИЯ | 2014 |
|
RU2572506C2 |
| ДВИЖИТЕЛЬ | 2007 |
|
RU2344961C1 |
| ДВИЖИТЕЛЬ | 2004 |
|
RU2288858C2 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2338906C1 |
| РОТОРНО-ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2021 |
|
RU2772831C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ С САННОГО ХОДА НА КОЛЕСНЫЙ | 1989 |
|
RU2043231C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2282734C2 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2019 |
|
RU2708178C1 |
| Устройство для удаления грата с листовых заготовок после газотермической резки | 1990 |
|
SU1803296A1 |
Изобретение относится к движителям транспортных средств. Движитель содержит платформу на опорной поверхности, имеющую ось, связанную с приводным шкивом, обеспечивающим движение платформы. Движитель снабжен аэродинамическими поверхностями с клапанами, взаимодействующими с окружающей средой и обеспечивающими перемещение вперед платформы. Способ перемещения транспортного средства характеризуется использованием движителя. Изобретение направлено на повышение тягового усилия. 2 н.п. ф-лы, 4 ил.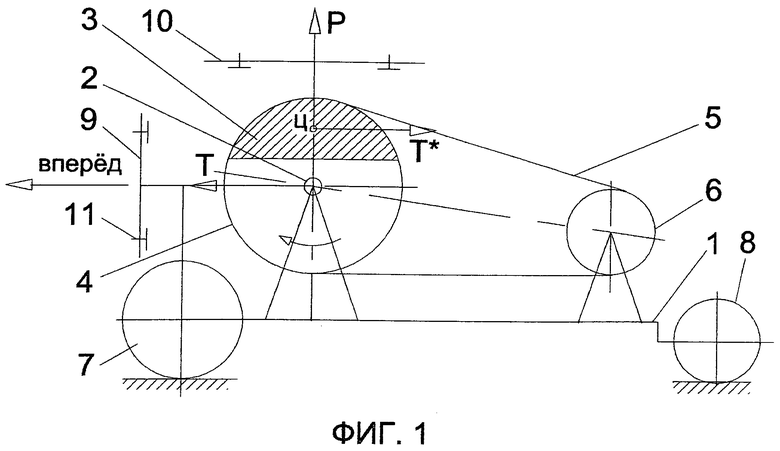
1. Движитель, содержащий платформу на опорной поверхности, имеющую ось с приводным шкивом, обеспечивающим движение платформы, отличающийся тем, что движитель снабжен аэродинамическими поверхностями, с клапанами, взаимодействующими с окружающей средой и обеспечивающими дополнительное перемещение вперед платформы.
2. Способ перемещения транспортного средства движителем по п. 1, отличающийся тем, что дополнительное перемещение транспортного средства обеспечивается взаимодействием аэродинамических поверхностей с окружающей средой.
| Энциклопедия, Авиация, Научное издательство Большая Российская Энциклопедия, ЦАГИ, 1994, с | |||
| Двухколейная подвесная дорога | 1919 |
|
SU151A1 |
| US 5937698 A1, 17.08.1999 | |||
| КРАЙНЕВ А.Ф.; Механика машин, М., Машиностроение, 2000, | |||
| с | |||
| Пуговица | 0 |
|
SU83A1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ КОЛЕБАНИЙ ДЛЯ ПЕРЕМЕЩЕНИЯ ТЕЛА В СРЕДЕ | 2004 |
|
RU2279997C2 |

