Изобретение относится к электротехнике и может быть использовано в электроприводе станков, гибридного и электрического транспорта, установок общепромышленного назначения.
Известен вентильно-индукторный электропривод с переключением фаз якоря в функции потокосцепления обмотки коммутируемой фазы. На обмотку электродвигателя подают однополярные импульсы напряжения, предварительно определяют и запоминают кривую намагничивания электродвигателя при заданном угле коммутации, осуществляют переключение напряжения с одной фазы обмотки на другую, для чего вычисляют мгновенное напряжение на обмотке и определяют мгновенное значение потокосцепления в соответствии с зависимостью

где U - мгновенное значение напряжения на обмотке;
i - мгновенное значение тока в обмотке;
R - расчетное значение сопротивления обмотки.
Одновременно по мгновенному значению тока в обмотке и запомненной кривой намагничивания определяют заданное значение потокосцепления, сравнивают полученное мгновенное значение потокосцепления с заданным ψ(зад)(i) и в момент их совпадения вырабатывают сигнал на отключение работающей фазы обмотки и включение следующей, для которой процесс повторяют (DE 3826892 С2, опубл. 17.03.1984).
Известно устройство, корректирующее вычислительную процедуру (1) при изменении рабочей температуры обмотки. Это позволяет устранить неточность вычислений, вызванную нестабильностью активного сопротивления, т.к. для ряда двигателей, особенно маломощных, значение активного сопротивления велико и вклад второго слагаемого подынтегрального выражения в (1) становится значительным. Устройство включает тепловую модель двигателя и датчики температуры фаз двигателя (RU 2182743 С1, опубл. 20.05.2002) (прототип). В нем для управления вентильно-индукторным электроприводом, содержащим индукторный электродвигатель, подключенный к выходу вентильного преобразователя, управляющий вход которого через широтно-импульсный модулятор соединен с выходом регулятора тока электродвигателя, датчик тока электродвигателя и напряжения звена постоянного тока вентильного преобразователя, сумматор, первый вход которого соединен с выходом датчика напряжения звена постоянного тока через первый блок умножения, а вход сумматора через второй блок умножения соединен с выходом датчика тока электродвигателя, который также подключен через последовательно соединенные функциональный преобразователь, реализующий кривую намагничивания электродвигателя при заданном угле коммутации, к одному из входов компаратора, второй вход которого через интегратор соединен с выходом сумматора, а выход компаратора подключен ко входу управления коммутацией фаз вентильного преобразователя, устройство определения текущего значения сопротивления обмотки, вход которого соединен с выходом датчика тока электродвигателя, а выход подключен ко второму входу второго блока умножения, устройство определения текущего значения сопротивления обмотки содержит последовательно соединенные блок определения потерь, блок тепловой модели электродвигателя, сумматор и блок вычисления, реализующий зависимость

где R0 - сопротивление обмотки в холодном состоянии;
α - температурный коэффициент сопротивления материала обмотки;
Т - температура обмотки в нагретом состоянии;
Т0 - температура окружающей среды при измерении R0,
а также датчик температуры окружающей среды, причем первый вход блока определения потерь является входом устройства, второй его вход соединен с выходом блока вычисления, являющимся также выходом устройства, второй вход сумматора подключен к выходу датчика температуры окружающей среды, а ко входу задания параметров блока вычисления подключены задатчики сопротивления обмотки в холодном состоянии и соответствующей температуры окружающей среды.
Недостатками известного устройства является его сложность, пониженная надежность из-за включения ряда дополнительных датчиков температуры окружающей среды, обмоток фаз, дополнительного решающего блока определения текущего значения сопротивления на шесть арифметических действий в (2) и использования приближенной одноступенчатой тепловой модели двигателя [3].
Техническая задача, решаемая предлагаемым устройством, состоит в упрощении, повышении надежности устройства. Технический эффект, используемый при решении поставленной задачи, заключается в упрощении алгоритма учета изменения активного сопротивления фазы в результате нагрева и достигается тем, что в устройстве, содержащем вентильно-индукторный электродвигатель, подключенный к выходу вентильного преобразователя, управляющий вход которого через широтно-импульсный модулятор соединен с выходом регулятора тока электродвигателя, датчики тока электродвигателя и напряжения звена постоянного тока вентильного преобразователя, сумматор напряжений, первый вход которого соединен с выходом датчика напряжения звена постоянного тока через первый блок умножения, а второй вход сумматора через второй блок умножения соединен с выходом датчика тока электродвигателя, который также подключен через последовательно соединенные функциональный преобразователь, реализующий кривую намагничивания электродвигателя при заданном угле коммутации, к одному из входов компаратора потокосцеплений, второй вход которого через интегратор потокосцепления соединен с выходом сумматора напряжений, а выход компаратора подключен к входу управления коммутацией фаз вентильного преобразователя, согласно изобретению на второй вход второго блока умножения через выход и первый вход сумматора сопротивлений подключен выход блока деления, причем с входом делимого соединен выход интегратора потокосцепления, а с входом делителя соединен выход интегратора тока, первый вход которого подключен к датчику тока и первому входу компаратора токов, а второй вход подключен к источнику нулевого уровня напряжения, выход компаратора токов через первый блок временной задержки соединен с входом управления блока деления, через первый и второй блоки временных задержек соединен с входами управления интегратора тока и интегратора потокосцепления, а через третий блок временной задержки соединен с входом управления устройством временного хранения данных, выход которого соединен со вторым входом сумматора сопротивлений, а вход подключен к выходу управляемого переключателя, с первым входом которого соединен источник напряжения сигнала уровня начального значения сопротивления фазы двигателя, к второму входу подключен выход сумматора сопротивлений, а с входом управления управляемого переключателя соединен выход триггера, снабженного входами установки и сброса, соединенными соответственно с источниками командных сигналов пуск и стоп.
Благодаря тому что структурой устройства электропривода обеспечивается уточнение значения сопротивления в (1) в конце каждого периода коммутации фазы без использования дополнительных датчиков температуры, относительно сложной формулы определения текущего сопротивления на шесть арифметических действий в (2) и приближенной одноступенчатой тепловой модели теплообмена [3], удается повысить надежность работы устройства.
Сущность изобретения поясняется схемами и диаграммами на фиг. 1, фиг. 2 и фиг. 3, на которых представлены схема устройства управления вентильно-индукторным электроприводом с диаграммами ее работы и численными примерами расчета уточненного значения изменяющегося при нагреве сопротивления фазы на периоде ее коммутации.
Устройство содержит вентильно-индукторный электродвигатель 1, подключенный к выходу вентильного преобразователя 2, управляющий вход которого через широтно-импульсный модулятор 3 соединен с выходом регулятора тока 4 электродвигателя, датчики тока электродвигателя 5 и напряжения звена постоянного тока 6 вентильного преобразователя 2, сумматор напряжений 7, первый вход которого соединен с выходом датчика напряжения звена постоянного тока 6 через первый блок умножения 8, а второй вход сумматора через второй блок умножения 9 соединен с выходом датчика тока электродвигателя 5, который также подключен через последовательно соединенные функциональный преобразователь 10, реализующий кривую намагничивания электродвигателя при заданном угле коммутации, к одному из входов компаратора потокосцеплений 11, второй вход которого через интегратор потокосцепления 12 соединен с выходом сумматора напряжений, а выход компаратора подключен к входу управления коммутацией фаз вентильного преобразователя 2. На второй вход второго блока умножения 9 через выход и первый вход сумматора сопротивлений 13 подключен выход блока деления 14, причем с входом делимого соединен выход интегратора потокосцепления 12, а с входом делителя соединен выход интегратора тока 15, первый вход которого подключен к датчику тока 5 и первому входу компаратора токов 16, а второй вход подключен к источнику нулевого уровня напряжения. Выход компаратора токов через первый блок временной задержки 17 соединен с входом управления блока деления 14, через первый и второй блоки временных задержек 18 соединен с входами управления интегратора тока 15 и интегратора потокосцепления 12, а через третий блок временной задержки 19 соединен с входом управления устройством временного хранения данных 20, выход которого соединен со вторым входом сумматора сопротивлений, а вход подключен к выходу управляемого переключателя 21, с первым входом которого соединен источник напряжения сигнала уровня начального значения сопротивления фазы двигателя 22, к второму входу подключен выход сумматора сопротивлений 13, а с входом управления управляемого переключателя соединен выход триггера 23, снабженного входами установки и сброса, соединенными соответственно с источниками командных сигналов пуск и стоп.
Устройство работает следующим образом.
На обмотку электродвигателя 1 подаются однополярные импульсы напряжения с преобразователя 2 и ШИМ 3, предварительно определяется и запоминается кривая намагничивания электродвигателя при заданном угле коммутации в блоке 10, осуществляется переключение напряжения с одной фазы обмотки на другую в момент срабатывания компаратора потокосцеплений 11. Для этого вычисляется мгновенное напряжение на обмотке с использованием датчика напряжения 6 и корректирующей информации по модуляции сигнала, поданной на второй вход умножающего устройства 8. На входе интегратора 12 определяется разность скорректированного напряжения питания фазы и падения напряжения на активном сопротивлении на мгновенное значение потокосцепления в соответствии с зависимостью (1). На выходе интегратора 12 выделяется сигнал, пропорциональный текущему значению потокосцепления, который и используется для сравнения его на компараторе с заданным и организации переключения фаз в нужный момент.
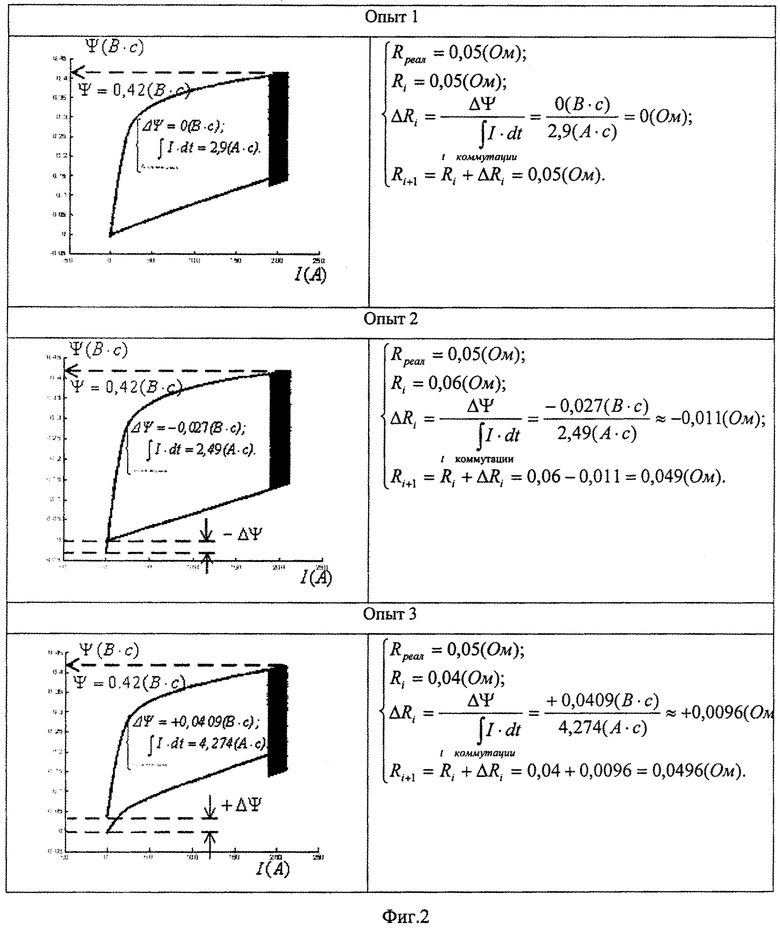
В работе устройства учитывается то, что в конце периода коммутации фазы (tкоммутации) при полном цикле изменения питающего напряжения по достижении фазным током нулевого значения полюс и обмотка фазы должны вернуться в исходное состояние при нулевом конечном потокосцеплении. Остаточное значение потокосцепления в конце цикла коммутации может свидетельствовать лишь о том, что неверно рассчитано второе слагаемое подынтегрального выражения правой части (1). Причем первое слагаемое вычисляется без существенной погрешности с использованием непосредственного измерения входящих в него величин. Источником ошибки может быть неверно заданное значение активного сопротивления фазы против реального значения. По результату коммутации фазы можно определить корректирующее значение для величины сопротивления фазы по выражению:

где ΔR - корректирующее значение для активного сопротивления фазы;
tкоммутации - период коммутации одной фазы;
Ri - нескорректированное значение активного сопротивления на периоде коммутации фазы.
Для обеспечения вычислений по (3) определяется значение интеграла, стоящего в числителе, с помощью интегратора потокосцепления 12 фиг. 1, и интеграла, стоящего в знаменателе - с помощью интегратора тока 15. Интегратор 12 участвует в обеспечении выполнения двух задач: определения момента коммутации фазы по (1) и определения остаточного значения потокосцепления - числитель в (3). Операцию деления производит блок 14 фиг. 1. Для выполнения расчета по (3) компаратор токов 16 по признаку достижения током фазы нулевого значения формирует с блоками задержек времени сигнал управления, разрешающий операцию деления для блока деления 14, сигнал управления записью в устройство временного хранения данных скорректированного значения сопротивления фазы и сигнал управления (сброса заряда) для интеграторов тока 15 и потокосцепления 12. Найденное корректирующее значение сопротивления используется в конце коммутации фазы для расчета скорректированного значения сопротивления - сигнала на выходе сумматора сопротивлений 13:

На следующем периоде коммутации фазы предполагается равенство Ri=Ri+1, и далее процесс повторяется. В качестве начального значения сопротивления фазы при включении привода принимается его паспортное значение R0, поданное в систему с выхода источника сигнала 22 фиг. 1. Хранение промежуточного результата вычисления скорректированного значения сопротивления обеспечивает устройство временного хранения данных (УВХ) 20 фиг. 1, вычисление по (4) обеспечивается сумматором сопротивлений 13 фиг. 1 совместно с УВХ. Число арифметических операций в формулах, реализуемых в предлагаемом устройстве (3, 4), равно трем вместо шести в прототипе (2). Выражение, стоящее в числителе (3), вычисляется и в прототипе (1), и в предлагаемом устройстве.
На диаграммах фиг. 2 представлены результаты трех опытов коррекции расчетного сопротивления фазы по результату ее коммутации: опыт 1 с точным расчетным значением активного сопротивления (Rреал=Ri=0,05 Ом); опыт 2 с расчетным сопротивлением, большим, чем реальное значение (Rреал=0,05 Ом, Ri=0,06 Ом); опыт 3 с расчетным сопротивлением, меньшим, чем реальное значение (Rреал=0,05 Ом, Ri=0,04 Ом). Обозначен уровень потокосцепления отключения фазы ψ=0,425В·с, одинаковый для трех опытов. Вид диаграмм повторяет форму двух характеристик намагничивания фазы в момент включения фазы и в момент ее отключения. Отражен эффект работы релейного регулятора тока, поддерживающего рабочий ток двигателя около значения в 200 А. Рядом с соответствующей диаграммой представлен расчет шага оптимизации в конце периода коммутации фазы по (3) и (4). Расчетные сопротивления во втором и третьем случае первоначально изменены на ±20%. По результатам коррекции для каждого из опытов значения сопротивлений уточняются и ошибка скорректированного значения против реального значения составляет величину 1÷2% фиг. 2, что соизмеримо с погрешностью измерения.
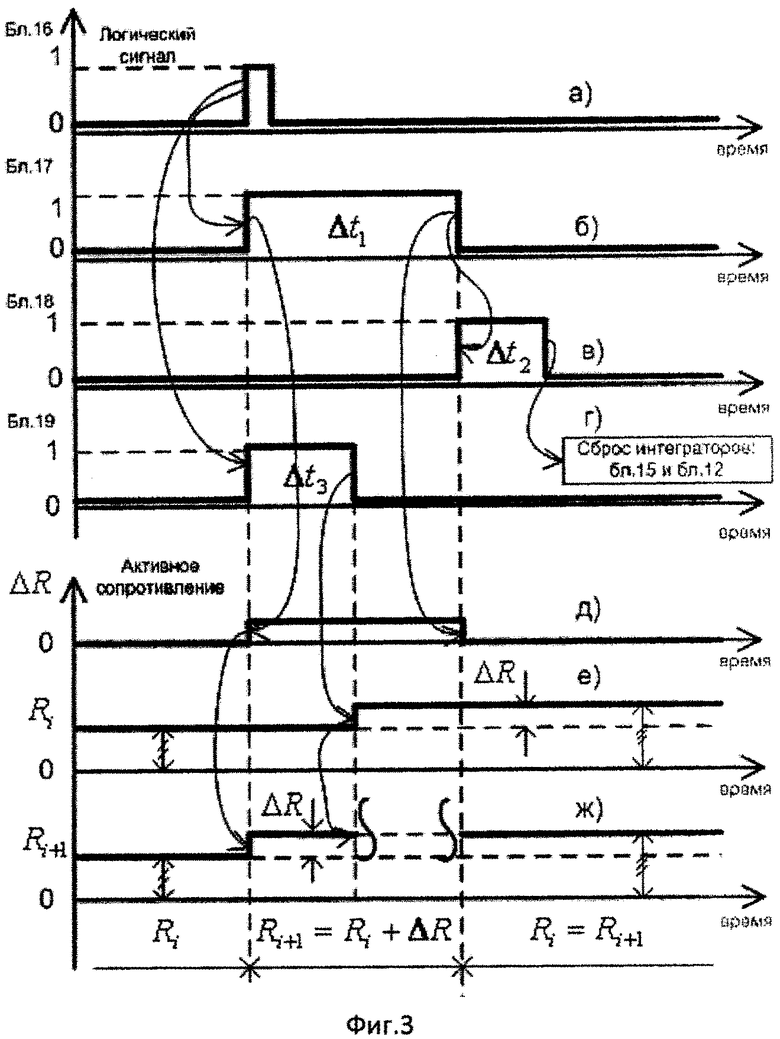
Введение блоков временных задержек 17, 18, 19 фиг. 1, воздействующих на входы управления ряда блоков устройства, обеспечивает необходимую очередность их работы, показанную на временных диаграммах фиг. 3. Срабатывание компаратора токов 16 диаграмма фиг. 3а) в конце периода коммутации фазы запускает отсчет временных выдержек фиг. 3б) и г). Блок 17 временной задержки фиг. 3б), начинающий работу по фронту сигнала срабатывания компаратора токов, разрешает работу блока деления 14 фиг. 1 и на время существования логического сигнала фиг. 3б) Δt1, блок деления показывает частное фиг. 3д) - корректирующее значение для активного сопротивления фазы ΔR. При этом на базе сигнала фиг. 3ж) на выходе сумматора сопротивлений подготавливается скорректированное значение сопротивление для записи в УВХ. По срезу (по заднему фронту) сигнала управления фиг. 3г) блока 19, запущенного фронтом сигнала компаратора токов, через выдержку времени Δt3 УВХ запоминает очередное скорректированное значение сопротивления фиг. 3ж). После окончания выдержки времени Δt1 заканчивает работу делитель, сбрасываются заряды интеграторов тока и потокосцепления по срезу сигнала блока 18 с выдержкой времени Δt2. Динамическое управление блоками (по фронтам и срезам логических сигналов) принято для обеспечения устойчивой работы оборудования. По истечении времени t=Δt1+Δt2 после окончания работы фазы она готова к очередному циклу коммутации. Очевидно, что это время должно быть достаточно малым для обеспечения готовности работы фазы с новым значением активного сопротивления на следующем периоде коммутации в соответствии с алгоритмом переключения всех остальных фаз вентильно-индукторного двигателя.
Практическая реализация устройства может быть осуществлена с использованием стандартных элементов: множительно-делительных устройств, устройства временного хранения, генераторов логических сигналов из элементов систем УБСР-АИ, УБСР-ДИ [4], на базе отечественной микроконтроллерной техники (Треи-5В 04/05) в программно-аппаратной среде [5] или с использованием зарубежных аналогов контроллеров фирм Microchip, Texas Instruments и т.п.
Исходное значение сопротивления фазы на первом шаге алгоритма при запуске системы подается от источника фиксированного уровня значения сопротивления, равного паспортному значению. Первоначальное задание сопротивления фазы R0, блок 22 фиг. 1, обеспечивается управляемым ключом 21 фиг. 1 с сигналом управления, полученного от R-S триггера 23 фиг. 1. В зависимости от логического сигнала на выходе триггера устройство работает на первом периоде коммутации с значением сопротивления R0 в (1) или со скорректированной величиной активного сопротивления фазы, поступившего из УВХ на последующих периодах коммутации.
В предложенном устройстве процесс коммутации фазы соответствует технологии управления вентильно-индукторным двигателем, обеспечиваются для алгоритма точные значения активных сопротивлений фазы без использования дополнительных датчиков температуры окружающей среды и обмоток фаз двигателя, приближенной одноступенчатой тепловой модели по упрощенной формуле, что повышает надежность работы устройства.
Литература
1. DE 3826892 С2, 17.03.1984.
2. RU 2182743 С1, 20.05.2002 (прототип).
3. Горнов А.О. Нагревание и охлаждение электрических двигателей. М.: МЭИ, 1980. - 56 с.
4. Справочник по наладке электрооборудования промышленных предприятий. Под ред. М.Г. Зименкова, Г.В. Розенберга, Е.М. Феськова. - М.: Энергоатомиздат, 1983. - 480 с.
5. Егоров А.А. Промышленные контроллеры в России и за рубежом // Промышленные АСУ и контроллеры. 2008 №5, №6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНОЙ МАШИНОЙ | 2003 |
|
RU2242837C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2225067C1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2004 |
|
RU2274944C1 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
Изобретение относится к области электротехники и может быть использовано в электроприводе станков, гибридного и электрического транспорта, установок общепромышленного назначения. Техническим результатом является повышение надежности устройства. Устройство управления предусматривает бездатчиковый принцип управления вентильно-индукторным двигателем с переключением обмоток фаз статора по признаку достижения вычисленным мгновенным значением потокосцепления заданного уровня. Заданное значение намагничивания соответствует предварительно определенной и запомненной кривой намагничивания. Коррекция значения активного сопротивления фазы при нагреве проходит по результату коммутации фазы. Момент окончания периода коммутации фазы детектирует компаратор контроля величины тока. Согласование работы во времени блоков интеграторов тока и потокосцепления, блока деления, устройства временного хранения данных и управляемого ключа обеспечивают три блока временных задержек распространения сигналов управления. 3 ил.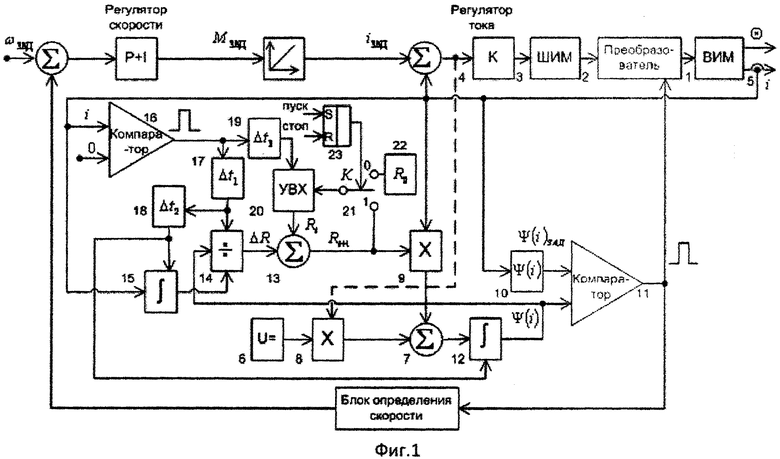
Устройство для управления вентильно-индукторным электроприводом, содержащее вентильно-индукторный электродвигатель, подключенный к выходу вентильного преобразователя, управляющий вход которого через широтно-импульсный модулятор соединен с выходом регулятора тока электродвигателя, датчики тока электродвигателя и напряжения звена постоянного тока вентильного преобразователя, сумматор напряжений, первый вход которого соединен с выходом датчика напряжения звена постоянного тока через первый блок умножения, а второй вход сумматора через второй блок умножения соединен с выходом датчика тока электродвигателя, который также подключен через последовательно соединенные функциональный преобразователь, реализующий кривую намагничивания электродвигателя при заданном угле коммутации, к одному из входов компаратора потокосцеплений, второй вход которого через интегратор потокосцепления соединен с выходом сумматора напряжений, а выход компаратора подключен к входу управления коммутацией фаз вентильного преобразователя, отличающееся тем, что на второй вход второго блока умножения через выход и первый вход сумматора сопротивлений подключен выход блока деления, причем с входом делимого соединен выход интегратора потокосцепления, а с входом делителя соединен выход интегратора тока, первый вход которого подключен к датчику тока и первому входу компаратора токов, а второй вход подключен к источнику нулевого уровня напряжения, выход компаратора токов через первый блок временной задержки соединен с входом управления блока деления, через первый и второй блоки временных задержек соединен с входами управления интегратора тока и интегратора потокосцепления, а через третий блок временной задержки соединен с входом управления устройством временного хранения данных, выход которого соединен со вторым входом сумматора сопротивлений, а вход подключен к выходу управляемого переключателя, с первым входом которого соединен источник напряжения сигнала уровня начального значения сопротивления фазы двигателя, к второму входу подключен выход сумматора сопротивлений, а с входом управления управляемого переключателя соединен выход триггера, снабженного входами установки и сброса, соединенными соответственно с источниками командных сигналов пуск и стоп.
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| УСТАНОВКА ДЛЯ СУШКИ ПАСТИРОВАННЫХ КРЫШЕК КОНСЕРВНЫХ БАНОК | 1967 |
|
SU225067A1 |
| Видоизменение устройства для освещения и окрашивания мениска в водомерных стеклах паровых котлов и баков | 1928 |
|
SU17245A1 |
| RU 101301385 B1, 10.09.2013 | |||
| CN 103001508 A, 27.03.2013 | |||
| US 20130069577 A1, 21.03.2013 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЫХАТЕЛЬНЫМИ АППАРАТАМИ | 0 |
|
SU396858A1 |
| WO 2011004546 A1, 13.01.2011. | |||

