Изобретение относится к информационно-измерительной технике и электротехнике, в частности к измерению параметров тока и к управлению током электромеханического преобразователя для преобразования механической энергии в электрическую энергию и управляемой электрической энергии в управляемую механическую энергию, например, для синхронных, синхронно-реактивных и асинхронных электрических машин.
Изобретение направлено на решение задачи векторной ориентации [1-8] при измерении фазы тока и управления фазой тока в координатах других векторов состояния электромеханического преобразователя, а именно в координатах потокосцеплений электромеханического преобразователя энергии (потокосцепления статора, потокосцепления в воздушном зазоре, потокосцепления ротора), а также напряжения статора и тока ротора, т.е. задачи векторного контроля состояния электромеханического преобразователя ("векторинг").
Известен способ векторной ориентации тока электромеханического преобразователя энергии, при котором ориентируют ток путем прямого преобразования заданных токов в декартовых координатах относительно фазы ориентирующего другого вектора состояния электромеханического преобразователя, совпадающего с ориентирующей фазой (фазой синхронизации) декартовых координат, при этом управляют током в виде разности двух токов косинусоидального (синфазного) и синусоидального (ортофазного) токов, соответственно совпадающего по фазе и ортогонального по фазе относительно ориентирующего (синхронизирующего) вектора состояния электромеханического преобразователя энергии [1] (Патент РФ N 1458951 В.А.Мищенко, Н.И.Мищенко "Способ управления многофазным инвертором и устройство для его осуществления") .
Устройство для осуществления способа содержит прямой преобразователь декартовых координат, два входа которого соединены с задатчиками амплитуд соответственно синфазного и ортофазного токов, и два других входа подключены к генератору синусной и косинусной функций ориентирующей фазы [1].
Недостатком этого технического решения является малая точность задания ориентирующей фазы (фазы синхронизации) и векторной ориентации тока, что связано с появлением вектора ошибки из-за нелинейных взаимосвязанных изменений фазы, амплитуды и частоты ориентирующего вектора состояния электромеханического преобразователя энергии, например вектора потокосцепления в воздушном зазоре или вектора потокосцепления ротора в зависимости от режимов работы электромеханического преобразователя энергии.
Наиболее близким техническим решением (прототипом) является способ векторной ориентации тока электромеханического преобразователя энергии, при котором измеряют ток электромеханического преобразователя в виде разности синфазного (косинусоидального) и ортофазного (синусоидального) токов, соответственно совпадающего по фазе и ортогонального по фазе относительно фазы синхронизации, соответствующей фазе ориентирующего вектора состояния электромеханического преобразователя [2] (Авторское свидетельство СССР N 1681371 В. А. Мищенко, Н. И.Мищенко "Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе").
Устройство векторной ориентации для осуществления этого способа содержит датчик тока и преобразователь декартовых координат, два входа которого связаны с выходами датчика тока, а два других входа - подключены к генератору синусной и косинусной функций фазы синхронизации [2].
Недостатком этого технического решения является малая точность измерения ориентирующей фазы (фазы синхронизации) и векторной ориентации тока, а также ограниченные функциональные возможности векторной ориентации, что связано с изменением углового (фазового) смещения векторов состояния, трудностями измерения этого фазового смещения между ориентирующими векторами, а также с большими ошибками при разделении мгновенной фазы от мгновенной амплитуды (например, переменные напряжение или пространственные векторы потокосцеплений с учетом искажений формы) в динамических и статических режимах электромеханического преобразователя, описанных в [1-8].
Целью изобретения является повышение точности векторной ориентации тока и расширение функциональных возможностей векторного измерения тока и векторного управления током в динамических и статических режимах электромеханического преобразователя энергии, а также векторного контроля ("векторинга") электромеханического преобразователя.
Решение поставленной задачи и указанная цель изобретения достигаются техническим решением, представляющим собой способ векторной ориентации, в котором измеряют ток электромеханического преобразователя в виде разности синфазного (косинусоидального) и ортофазного (синусоидального) токов, соответственно совпадающего по фазе и ортогонального по фазе относительно фазы синхронизации тока, соответствующей фазе ориентирующего вектора состояния электромеханического преобразователя, дополнительно измеряют мгновенные величины напряжения статора электромеханического преобразователя, по измеренным величинам напряжения и тока вычисляют измеренные амплитуды и фазы тока и напряжения, кроме того, фазные величины потокосцепления статора в виде интеграла разности измеренных величин напряжения и тока, кроме того фазу и амплитуду потокосцепления статора, потокосцепления ротора, тока ротора, потокосцепления в воздушном зазоре, затем делением измеренных фазных величин на величины соответствующих амплитуд вычисляют нормированные с единичной амплитудой косинусные и синусные функции полученных фаз векторов состояния электромеханического преобразователя и измеряют синфазные и ортофазные токи и углы фазового сдвига (фазового смещения) вектора тока относительно векторов состояния путем задания фазы синхронизации тока равной одной из полученных фаз или поочередно каждой из полученных фаз векторов состояния электромеханического преобразователя.
Кроме того, измеряют электромагнитный момент электромеханического преобразователя в виде произведения измеренной амплитуды ортофазного тока, пропорционального синусной функции фазы потокосцепления статора, на величину амплитуды потокосцепления статора.
Дополнительно измеряют текущую величину взаимоиндуктивности электромеханического преобразователя путем деления величины измеренного электромагнитного момента на величину произведения амплитуды ортофазного тока, пропорционального синусной функции фазы тока ротора, на величину амплитуды тока ротора, при этом амплитуду тока намагничивания измеряют путем деления измеренной величины амплитуды потокосцепления в воздушном зазоре на измеренную текущую величину взаимоиндуктивности.
Для осуществления способа в устройство векторной ориентации, содержащее датчик тока, и преобразователь декартовых координат, два входа которого связаны с выходами датчика тока, а два других входа подключены к генератору синусной и косинусной функций фазы синхронизации, при этом датчик тока подключен к электрической линии, связанной с электромеханическим преобразователем энергии, а два выхода преобразователя декартовых координат образуют выходы измеренных амплитуд синфазного и ортофазного токов, дополнительно введен датчик напряжения, шесть блоков модуля, шесть блоков деления, четыре пары сумматоров, пять преобразователей декартовых координат, пять блоков угла фазового сдвига, блок вычисления активной мощности, блок вычисления реактивной мощности, при этом указанные дополнительно введенные элементы определенным образом связаны с выходами датчика тока, датчика напряжения и первого преобразователя декартовых координат.
Кроме того, дополнительно могут быть введены два блока умножения, входы первого из которых соединены с выходами первого блока модуля и с синусным входом третьего преобразователя декартовых координат, выход первого блока умножения подключен к первому входу второго блока умножения, второй вход которого соединен с выходом третьего блока модуля.
Дополнительно в устройство могут быть введены третий блок умножения и узел деления, первый вход которого соединен с выходом второго блока умножения, второй вход - подключен к выходу третьего блока умножения, три входа которого соединены соответственно с выходами первого и пятого блоков модулей и синусным выходом пятого преобразователя декартовых координат.
Кроме того, устройство векторной ориентации ("векторинг") может быть выполнено в микропроцессорном исполнении, включающем центральный цифровой сигнальный процессор, два цифровых сигнальных сопроцессора и программируемую постоянную память, входами и выходами объединенными шиной данных и шиной адреса, причем выходы датчика тока соединены с аналогичными входами первого цифрового сигнального сопроцессора, выходы датчика напряжения соединены с аналоговыми входами второго цифрового сигнального сопроцессора, кроме того, первый и второй цифровые сигнальные сопроцессоры содержат блоки векторных преобразований, блоки аналого-цифрового преобразования, первый, цифровой сигнальный сопроцессор содержит блок управления силовым преобразователем, блоки сопроцессоров объединены шиной данных и шиной адреса, к которым могут подключаться интерфейсные устройства измерения векторов состояния и (или) управления векторными параметрами электромеханического преобразователя энергии.
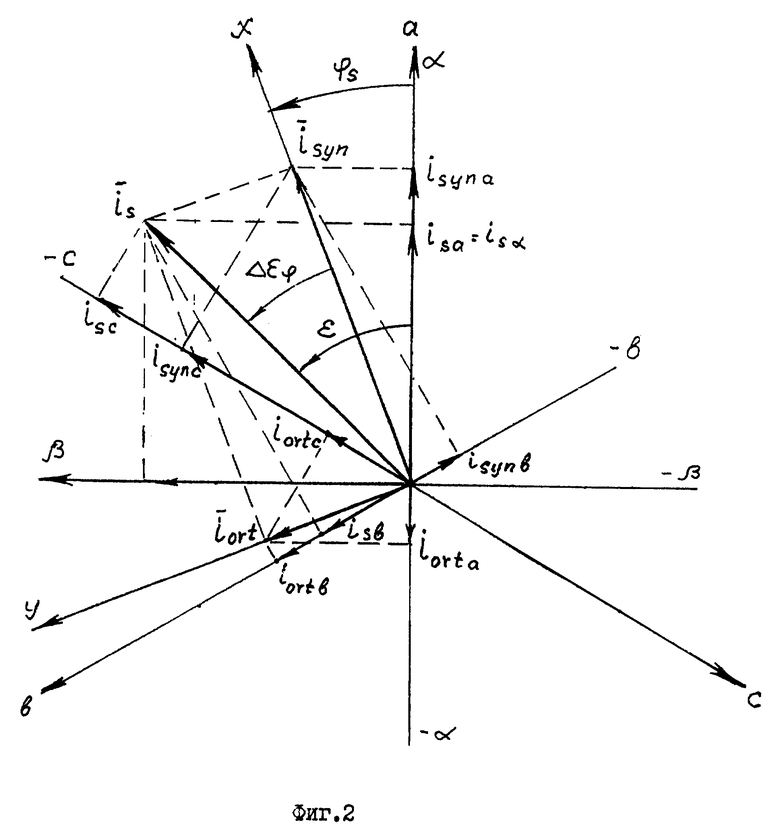
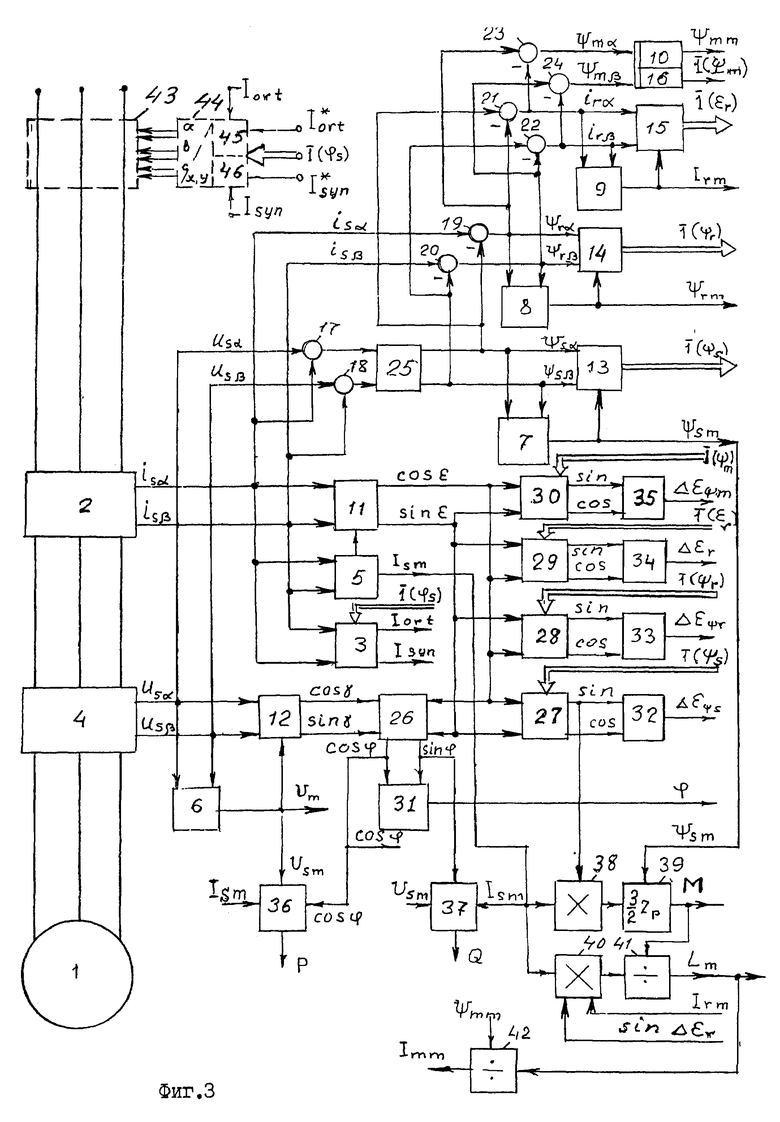
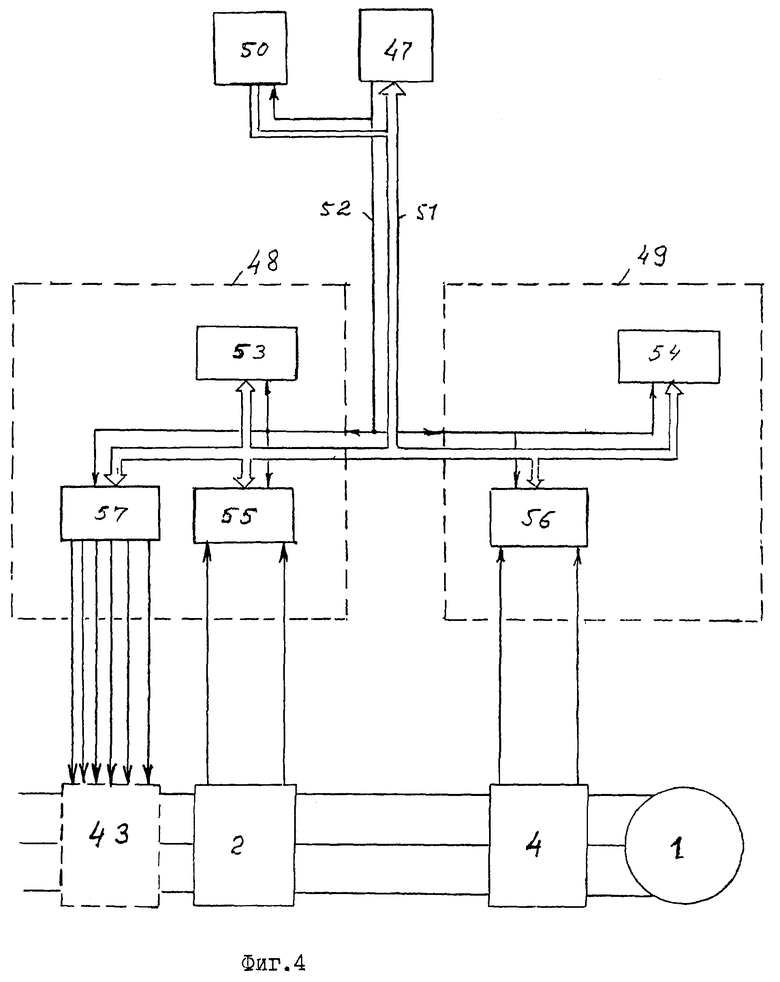
Техническое решение поясняется диаграммами и чертежами на фиг. 1-4. На фиг. 1 (1а, 1б) приведена диаграмма векторов состояния электромеханического преобразователя энергии и диаграмма векторной ошибки тока, на фиг. 2 - векторная диаграмма синфазного и ортофазного токов электромеханического преобразователей, на фиг. 3 - схема устройства векторной ориентации ("векторинга"), на фиг. 4 - схема микропроцессорного устройства векторной ориентации ("векторинга").
Сущностью технического решения является векторный контроль тока и всех переменных состояния электромеханического преобразователя энергии, изображенных на фиг. 1 соответствующими векторами состояния: тока статора  , напряжения статора
, напряжения статора  , потокосцепления статора
, потокосцепления статора  , потокосцепления ротора
, потокосцепления ротора  , потокосцепления в воздушном зазоре
, потокосцепления в воздушном зазоре  , тока ротора
, тока ротора  .
.
Электромеханические преобразователи энергии подчиняются следующему закону электромеханики: электромеханическое преобразование энергии происходит при фазовом и пространственном смещении токов и потокосцеплений электромеханического преобразователя энергии (фиг. 1а).
Смещенные фазы векторов состояния, показанные на фиг. 1 относительно неподвижной оси "а" статорной обмотки электромеханического преобразователя, совмещенной с неподвижной ориентацией осью α , обозначены:
ε - фаза вектора тока статора  ;
;
γ - фаза вектора напряжения статора  ;
;
ψs - фаза вектора потокосцепления статора  ;
;
ψr - фаза вектора потокосцепления ротора  ;
;
ψm - фаза вектора потокосцепления в воздушном зазоре  ;
;
εr - фаза вектора тока ротора  .
.
Если все указанные фазы совпадают, то электромеханического преобразования энергии не происходит, энергия тратится на возбуждение магнитного поля и на нагрев электромеханического преобразователя, если фазы смещены на ненулевые углы фазового сдвига, как показано на фиг. 1, то фазовые смещения векторов состояния, создающие электромеханическое преобразование энергии, характеризуются следующими углами фазового сдвига вектора тока  относительно других векторов состояния (фиг. 1а):
относительно других векторов состояния (фиг. 1а):
ϕ - относительно вектора напряжения  ;
; - относительно
- относительно  ;
; - относительно
- относительно  ;
; - относительно
- относительно  ;
;
Δεr - относительно  .
.
Как показано на фиг. 2 проекции векторов состояния на неподвижные оси статорной обмотки (для трехфазной обмотки оси a, b, c) характеризуют мгновенные фазные величины токов, напряжений и потокосцеплений m - фазного электромеханического преобразователя, а проекции на оси α,β неподвижной декартовой системы координат α,β (фиг. 1) характеризуют мгновенные фазные величины токов, напряжений и потокосцеплений эквивалентного двухфазного электромеханического преобразователя энергии, в котором одна из фаз "α" эквивалентна фазе "а" реального m - фазного электромеханического преобразователя энергии. Такой переход от m - фазной системы параметров (например, трехфазной системы a, b, c) к эквивалентной двухфазной системе α,β (фиг. 1) позволяет распространить техническое решение на любое число m фаз m - фазных электромеханических преобразователей, описываемых известными уравнениями обобщений электрической машины [3,4].
Объектом векторной ориентации согласно техническому решению является ток  , фазовое смещение которого на угол фазового сдвига Δεϕ (фиг. 1б) относительно вращающейся ориентирующей оси x вращающейся декартовой системы координат x, y создает электромеханическое преобразование энергии согласно приведенному выше закону электромеханики и закону Ампера:
, фазовое смещение которого на угол фазового сдвига Δεϕ (фиг. 1б) относительно вращающейся ориентирующей оси x вращающейся декартовой системы координат x, y создает электромеханическое преобразование энергии согласно приведенному выше закону электромеханики и закону Ампера:
где F - электромагнитная сила,  - единичный вектор контура тока,
- единичный вектор контура тока,  - магнитная индукция, i - ток, εϕ - угол фазового сдвига тока i относительно магнитного поля с индукцией B.
- магнитная индукция, i - ток, εϕ - угол фазового сдвига тока i относительно магнитного поля с индукцией B.
Векторная ошибка тока  (фиг. 1б), вызванная отклонением измеренного или заданного вектора тока
(фиг. 1б), вызванная отклонением измеренного или заданного вектора тока  относительно действительного вектора тока
относительно действительного вектора тока  накладывается на дополнительную ошибку векторной ориентации ориентирующей оси x* относительно действительной оси x магнитного поля, что приводит к увеличению ошибки угла фазового сдвига Δεϕ , величина которого необходима для измерения и управления электромеханическим преобразованием энергии по закону (1).
накладывается на дополнительную ошибку векторной ориентации ориентирующей оси x* относительно действительной оси x магнитного поля, что приводит к увеличению ошибки угла фазового сдвига Δεϕ , величина которого необходима для измерения и управления электромеханическим преобразованием энергии по закону (1).
Векторная ориентация тока  по измеренным трем векторам магнитного поля, вектора напряжения и вектора тока электромеханического преобразователя 1 (фиг. 3) осуществляется путем измерения тока
по измеренным трем векторам магнитного поля, вектора напряжения и вектора тока электромеханического преобразователя 1 (фиг. 3) осуществляется путем измерения тока  с помощью датчика 2 тока в виде двухфазного тока isα,isβ и преобразования измеренных токов isα,isβ в соединенном с датчиком 2 тока преобразователе 3 декартовых координат, на синусный и косинусный входы которого подают сигналы текущих координат sin, cos единичного вектора
с помощью датчика 2 тока в виде двухфазного тока isα,isβ и преобразования измеренных токов isα,isβ в соединенном с датчиком 2 тока преобразователе 3 декартовых координат, на синусный и косинусный входы которого подают сигналы текущих координат sin, cos единичного вектора  , характеризующего текущее пространственное положение магнитного поля в соответствии с уравнением (1).
, характеризующего текущее пространственное положение магнитного поля в соответствии с уравнением (1).
На выходе преобразователя 3 декартовых координат образуются две величины Isyn, Iort, характеризующие проекции вектора тока  в координатах x, y синхронизации с вектором состояния электромеханического преобразователя энергии:
в координатах x, y синхронизации с вектором состояния электромеханического преобразователя энергии:
где ϕs - фаза синхронизации, характеризующая фазу одного из векторов состояния.
Измеренные величины Isyn, Iort на выходе преобразователя 3 декартовых координат характеризуют амплитуды соответственно синфазного тока  и ортофазного тока
и ортофазного тока  (фиг. 3):
(фиг. 3):
В результате преобразований по уравнениям (2), (3) измеренный ток  равен разности измеренных синфазного и ортофазного токов:
равен разности измеренных синфазного и ортофазного токов:
isa= Ism•cos(ϕs+Δεϕ) = isyn-iort, (4)
где Ism - амплитуда фазного тока:
Δεϕ - угол фазового сдвига вектора тока относительно ориентирующей оси "x" единичного вектора  (фиг. 2).
(фиг. 2).
Измеренные амплитуды Isyn, Iort синфазного и ортофазного токов характеризуют как угол фазового сдвига Δεϕ вектора тока  относительно вектора
относительно вектора  , синхронизированного с координатами x, y, так и амплитуду тока Ism согласно выражениям:
, синхронизированного с координатами x, y, так и амплитуду тока Ism согласно выражениям:
Измерение амплитуд синфазного и ортофазного токов, синхронизированных относительно измеренных единичных векторов  направления других переменных состояния электромеханического преобразователя энергии, осуществляется в устройстве векторной ориентации, называемом "векторинг", схемы которого приведены на фиг. 3, 4.
направления других переменных состояния электромеханического преобразователя энергии, осуществляется в устройстве векторной ориентации, называемом "векторинг", схемы которого приведены на фиг. 3, 4.
В устройстве векторной ориентации по фиг. 3. в котором в электрической линии, связанной со статорной обмоткой электромеханического преобразователя энергии 1 (фиг. 3), включен датчик тока 2 с преобразователем 3 декартовых координат на его выходе, введены датчик 4 напряжения, шесть блоков 5, 6, 7, 8, 9, 10 модуля, шесть блоков 11, 12, 13, 14, 15, 16 деления, четыре пары сумматоров 17, 18; 19, 20; 21, 22; 23, 24, блок 25 интеграторов, пять преобразователей 26, 27, 28, 29, 30 декартовых координат, пять блоков 31, 32, 33, 34, 35 угла фазового сдвига, блок 36 вычисления активной мощности и блок 37 вычисления реактивной мощности.
Датчик 4 напряжения подключен к электрической линии, связанной с электромеханическим преобразователем 1 энергии. Выходы isα, isβ датчика 2 тока и выходы usα,usβ датчика 4 напряжения подключены ко входам соответственно первого и второго блоков 5, 6 модуля и первого и второго блоков 11, 12 деления. Кроме того, выходы датчика 2 тока и выходы датчика 4 напряжения подключены ко входам первой пары сумматоров 17, 18.
Выходы первой пары сумматоров 17, 18 соединены со входами блока 25 интеграторов. Выходы блока 25 интеграторов подключены непосредственно ко входам третьего блока 7 модуля и третьего блока 13 деления. Кроме того, выходы блока 25 интеграторов подключены через вторую пару сумматоров 19, 20 ко входам четвертого блока 8 модуля и четвертого блока 14 деления.
Вторые входы второй пары сумматоров 19, 20 соединены с выходами датчика 2 тока. Выходы второй пары сумматоров 19, 20 подключены через третью пару сумматоров 21, 22 к входам пятого блока 9 модуля и пятого блока 15 деления, а через четвертую пару сумматоров 23, 24 соединены с входами шестого блока 10 модуля и шестого блока 10 деления. Вторые входы третьей пары сумматоров 21, 22 подключены к выходам блока 25 интеграторов. Вторые входы четвертой пары сумматоров 23, 24 соединены с выходами второй пары сумматоров 19, 20.
Выходы шести блоков 5, 6, 7, 8, 9, 10 модулей подключены к третьим входам соответствующих блоков 11, 12, 13, 14, 15, 16 деления. Выходы первого блока 11 деления подключены к двум первым входам cosε, sinε упомянутых пяти преобразователей 26, 27, 28, 29, 30 декартовых координат, два других входа которых соединены с выходами соответствующих пяти блоков 12, 13, 14, 15, 16 деления. Выходы пяти преобразователей 26, 27, 28, 29, 30 декартовых координат соединены с входами соответствующих пяти блоков 31, 32, 33, 34, 35 угла фазового сдвига.
Выходы первого и второго блоков 5, 6 модулей соединены с двумя входами блока 36 вычисления активной мощности и двумя входами блока 37 вычисления реактивной мощности, третьи входы которых подключены соответственно к первому и второму выходам второго преобразователя 26 декартовых координат, входы которого образованы входами первого и второго блоков 12, 11 деления.
Два других входа первого преобразователя 3 декартовых координат подключены к двум выходам sin, cos одного из пяти других преобразователей 26, 27 28, 29, 30 декартовых координат.
Выходы шести блоков 5, 6, 7, 8, 9, 10 модулей образуют выходы измеренных мгновенных амплитуд фазных величин соответственно тока статора Ism, напряжения статора Usm, потокосцепления статора ψsm, потокосцепления ротора ψrm, тока ротора Irm, потокосцепления в воздушном зазоре ψmm.
Выходы шести блоков 11, 12, 13, 14, 15, 16 деления образуют выходы нормированных с единичной амплитудой измеренных синусной и косинусной функцией фаз шести векторов состояния соответственно фаз ε,γ,ψs,ψr,ψm,εr.
Выходы пяти преобразователей 26, 27, 28, 29, 30 декартовых координат образуют измеренные косинусные и синусные функции фаз соответственно синфазного и ортофазного токов  в измеренных координатах пяти векторов состояния электромеханического преобразователя
в измеренных координатах пяти векторов состояния электромеханического преобразователя 
Выходы пяти блоков 31, 32, 33, 34, 35 угла фазового сдвига образуют выходы измеренных углов фазового сдвига Δε (фазового смещения) вектора тока  относительно пяти других векторов состояния:
относительно пяти других векторов состояния: 
Выход блока 36 вычисления активной мощности образует выход измеренной мгновенной активной мощности P. Выход блока 37 образует выход измеренной мгновенной реактивной мощности Q.
Косинусный выход второго преобразователя 26 декартовых координат образует выход измеренного мгновенного коэффициента мощности cosϕ
В устройство векторной ориентации могут быть дополнительно введены два блока 38, 39 умножения, входы первого из которых (блока 38 умножения) соединены с выходом Ism первого блока 5 модуля и с синусным выходом sinψs третьего преобразователя 27 декартовых координат (потокосцепления статора  ). Выход первого блока 38 умножения подключен к первому входу второго блока 39 умножения, второй вход которого соединен с выходом ψsm третьего блока 7 модуля. Выход второго блока 39 умножения образует измерительный выход электромагнитного момента электромеханического преобразователя 1 энергии.
). Выход первого блока 38 умножения подключен к первому входу второго блока 39 умножения, второй вход которого соединен с выходом ψsm третьего блока 7 модуля. Выход второго блока 39 умножения образует измерительный выход электромагнитного момента электромеханического преобразователя 1 энергии.
В устройство векторной ориентации могут быть дополнительно введены третий блок 40 умножения и два узла 41, 42 деления. Первый вход первого узла 41 деления соединен с выходом второго блока 39 умножения. Второй вход первого узла 41 деления подключен к выходу третьего блока 40 умножения, три входа которого соединены соответственно с выходом первого и пятого блоков 5, 9 модуля и с синусным выходом четвертого преобразователя 29 декартовых координат (тока ротора  ). Выход первого узла 41 деления, образующий измерительный выход взаимоиндуктивности электромеханического преобразователя, соединен со входом второго узла 42 деления, второй вход второго узла 42 деления подключен к выходу шестого блока 10 модуля. Выход второго узла 42 деления образует измерительный выход амплитуды тока намагничивания.
). Выход первого узла 41 деления, образующий измерительный выход взаимоиндуктивности электромеханического преобразователя, соединен со входом второго узла 42 деления, второй вход второго узла 42 деления подключен к выходу шестого блока 10 модуля. Выход второго узла 42 деления образует измерительный выход амплитуды тока намагничивания.
В случае использования электромеханического преобразователя 1 в качестве электродвигателя электрическая линия, связанная со статорными обмотками электромеханического преобразователя 1, может быть соединена с силовым преобразователем 43, шесть входов которого соединены с преобразователем 44 координат. Входы преобразователя 44 координат связаны с регулятором 45 ортофазного тока и регуляторов 46 синфазного тока, фаза ϕs которых может быть задана выходными сигналами одного из пяти преобразователей 26, 27, 28, 29, 30 декартовых координат, а измеренные амплитуды синфазного и ортофазного тока подаются на входы регуляторов 45, 46 синфазного тока в качестве обратных связей с выходов первого преобразователя 3 декартовых координат.
Устройство векторной ориентации по схеме на фиг. 3 может быть реализовано на типовых дискретных аналоговых, цифровых, аналого-цифровых и цифроаналоговых микросхемах, общеупотребимых в информационно-измерительной технике.
Устройство векторной ориентации по схеме на фиг. 3 работает следующим образом.
При работе m - фазного электромеханического преобразователя 1 измеряются с помощью датчика тока двухфазный ток isα,isβ и с помощью датчика 4 напряжения двухфазное напряжение usα,usβ. Например, для трехфазного электромеханического преобразователя 1 двухфазный ток isα,isβ измеряется в соответствии с выражениями:
а двухфазное напряжение usα,Usβ измеряется согласно выражениям:
где isa, isb, Usa, Usb - фазные токи и напряжения электромеханического преобразователя в фазах "a", "b".
Измерительные операции по выражениям (7), (8) аналогично преобразованиям координат из трехфазной системы координат a, b, c в двухфазную декартовую систему координат α,β (фиг. 1). Из фиг. 1 следует, что на выходе датчика 2 тока (фиг. 3) и датчика 4 напряжения образуются сигналы, соответствующие выражениям:
где Ism, Usm - амплитуды фазных токов и напряжений.
На выходах первого и второго блоков 5, 6 модулей образуются измеренные величины мгновенных амплитуд Ism, Usm фазных токов и фазных напряжений в соответствии с выражениями:
На выходах первого и второго блоков 11, 12 деления образуются нормированные с единичной амплитудой косинусные и синусные функции мгновенной фазы ε вектора тока  и мгновенной фазы γ вектора напряжения
и мгновенной фазы γ вектора напряжения  :
:
Полученные в соответствии с выражениями (13), (14) сигналы на выходе блока 11 деления, образующие нормированные величины измеренных косинусных функций фазы ε тока, используются в качестве базовых величин всех векторных преобразований для осуществления способа векторной ориентации тока, реализуемых в пяти преобразователях 26-30 декартовых координат.
Векторная ориентация тока заключается в измерении углов фазового сдвига Δε вектора тока относительно всех других векторов состояния электромеханического преобразователя  и амплитуд Isyn, Iort синфазного и ортофазного токов. Величины Isyn, Iort образуются на выходе первого преобразователя 3 декартовых координат, синхронизированного фазой γ,ψs,ψr,εr,ψm любого из пяти указанных векторов состояния. Единичный вектор
и амплитуд Isyn, Iort синфазного и ортофазного токов. Величины Isyn, Iort образуются на выходе первого преобразователя 3 декартовых координат, синхронизированного фазой γ,ψs,ψr,εr,ψm любого из пяти указанных векторов состояния. Единичный вектор  подаваемый на косинусный и синусный входы первого преобразователя 3 декартовых координат, согласно (2), (3) ориентируют вектор тока
подаваемый на косинусный и синусный входы первого преобразователя 3 декартовых координат, согласно (2), (3) ориентируют вектор тока  , представленный измеренными входными токами isα,isβ на двух других входах преобразователя 3 декартовых координат, в координатах того вектора состояния, фаза которого равна фазе синхронизации ϕs преобразователя 3 декартовых координат. Измерение фаз ψs,ψr,εr,ψm векторов состояния
, представленный измеренными входными токами isα,isβ на двух других входах преобразователя 3 декартовых координат, в координатах того вектора состояния, фаза которого равна фазе синхронизации ϕs преобразователя 3 декартовых координат. Измерение фаз ψs,ψr,εr,ψm векторов состояния  осуществляется аналогично измерению фазы γ напряжения
осуществляется аналогично измерению фазы γ напряжения  , произведенному согласно выражениям (15), (16) следующим образом.
, произведенному согласно выражениям (15), (16) следующим образом.
На входы первой пары сумматоров 17, 18 подаются измеренные величины двухфазного напряжения usα,usβ и двухфазного тока isα,isβ. На выходе первой пары сумматоров 17, 18 образуются разности lsα,lsβ соответствующих измеренных напряжений и токов согласно выражениям:
где Rs - активное сопротивление фазной обмотки электромеханического преобразователя.
Полученные разности (17) подаются на входы блока 25 интеграторов, на выходах которого образуется двухфазное потокосцепление статора ψsα,ψsβ согласно уравнениям:
Полученные потокосцепления статора ψsα,ψsβ представляют собой функции фазы ψs вектора потокосцепления статора  , как показано на фиг. 1:
, как показано на фиг. 1:
где ψsm - амплитуда фазного потокосцепления статора.
Измеренные величины ψsα,ψsβ после преобразования в третьем блоке 7 модуля
и третьем блоке 13 деления
образуют на выходе третьего блока 13 деления измеренные нормированные с единичной амплитудой косинусную и синусную функции фазы вектора потокосцепления статора.
Одновременно полученные согласно выражениям (17) величины lsα,lsβ с выходов блока 25 интеграторов поступают на вторую пару сумматоров 19, 20. На вторые входы сумматоров 19, 20 поступают сигналы измеренного двухфазного тока isα,isβ . На выходах второй пары сумматоров 19, 20 образуются измеренные величины двухфазного потокосцепления ротора ψrα,ψrβ в соответствии с выражениями:
где Kr - коэффициент связи ротора электромеханического преобразователя; - переходная индуктивность статора электромеханического преобразователя.
- переходная индуктивность статора электромеханического преобразователя.
В соответствии с диаграммой на фиг. 1 величины ψrα,ψrβ представляют собой проекции вектора  на оси α,β, зависящие от угла (фазы) ψr вектора потокосцепления ротора
на оси α,β, зависящие от угла (фазы) ψr вектора потокосцепления ротора 
которые поступают на четвертый блок 8 модуля и четвертый блок 14 деления, на выходах которых на основании преобразований, аналогичных (20), (21), (22), образуются соответственно измеренные амплитуда ψrm потокосцепления ротора и нормированные с единичной амплитудой сигналы cosψr,sinψr фазы ψr вектора потокосцепления ротора  .
.
Одновременно измеренное описанным способом двухфазное потокосцепление ротора ψrα,ψrβ поступает на входы третьей пары сумматоров 21, 22 и четвертой пары сумматоров 23, 24.
На вторые входы третьей пары сумматоров 21, 22 поступают сигналы измеренных величин потокосцепления статора ψsα,ψsβ , в результате чего на выходах третьей пары сумматоров 21, 22 образуются сигналы измеренного тока ротора irα,irβ согласно выражениям:
где  - переходная индуктивность ротора электромеханического преобразователя;
- переходная индуктивность ротора электромеханического преобразователя;
Ks - коэффициент связи статора.
На вторые входы четвертой пары сумматоров 23, 24 поступают
выходные сигналы третьей пары сумматоров 23, 24 образующие, как следует из выражений (25), измеренные токи ротора irα,irβ. На выходах четвертой пары сумматоров 23, 24 образуются измеренные потокосцепления в воздушном зазоре ψmα,ψmβ согласно выражениям:
Измеренные на выходах третьей пары сумматоров 21, 22 токи ротора irα,irβ поступают на пятый блок 9 модуля и пятый блок 15 деления, а измеренные на выходах четвертой пары сумматоров 23, 24 потокосцепления в воздушном зазоре ψmα,ψmβ поступают на шестой блок 10 модуля и шестой блок 16 деления.
На выходах пятого и шестого блоков 9, 10 модуля образуются сигналы соответственно измеренной амплитуды тока ротора Irm и измеренной амплитуды потокосцепления в воздушном зазоре ψmm (в соответствии с аналогичными преобразованиями (11), (17), (20)).
На выходах пятого и шестого блоков 15, 16 деления образуются нормированные с единичной амплитудой I косинусные и синусные функции соответственно фазы тока ротора εr и фазы потокосцепления в воздушном зазоре ψm (в соответствии с аналогичными преобразованиями (13), (14), (15), (16), (21), (22).
В результате описанных процессов измерений и преобразований образуется система измеренных фаз и амплитуд шести векторов состояния электромеханического преобразователя 
Векторная ориентация тока  осуществляется путем подачи полученных пяти пар единичных косинусных и синусных функций фаз γ , ψs,ψr,εr,ψm пяти векторов состояния
осуществляется путем подачи полученных пяти пар единичных косинусных и синусных функций фаз γ , ψs,ψr,εr,ψm пяти векторов состояния  на входы пяти преобразователей 31, 32, 33, 34, 35 декартовых координат, на вторые входы которых поступают единичные косинусная и синусная функции фазы ε тока
на входы пяти преобразователей 31, 32, 33, 34, 35 декартовых координат, на вторые входы которых поступают единичные косинусная и синусная функции фазы ε тока  . Во всех пяти преобразователях 31 - 35 происходит однотипное преобразование декартовых координат единичных синусных и косинусных функций соответствующих пяти фаз γ,ψs,ψr,εr,ψm, обобщенно обозначаемых как фаза синхронизации ϕs.
. Во всех пяти преобразователях 31 - 35 происходит однотипное преобразование декартовых координат единичных синусных и косинусных функций соответствующих пяти фаз γ,ψs,ψr,εr,ψm, обобщенно обозначаемых как фаза синхронизации ϕs.
Фаза синхронизации ϕs представляет собой фазу единичного вектора  , совпадающего по направлению с ориентирующим вектором
, совпадающего по направлению с ориентирующим вектором 
В преобразователях 31, 32, 33, 34, 35 происходит следующее преобразование декартовых координат:
где Δε = ε-ϕs - угол фазового сдвига ( фазового смещения) вектора тока  относительно фазы ϕs одного из пяти векторов состояния
относительно фазы ϕs одного из пяти векторов состояния 
Фазовое смещение вектора тока  на угол фазового сдвига Δε относительно пяти векторов состояния
на угол фазового сдвига Δε относительно пяти векторов состояния  определяется пятью блоками 31, 32, 33, 34, 35 угла фазового сдвига, в которых происходят следующие преобразования выходных сигналов cosΔε,sinΔε преобразователей 31-35 декартовых координат:
определяется пятью блоками 31, 32, 33, 34, 35 угла фазового сдвига, в которых происходят следующие преобразования выходных сигналов cosΔε,sinΔε преобразователей 31-35 декартовых координат:
В результате преобразований (27), (28) на выходах пяти блоков 31, 32, 33, 34, 35 угла фазового сдвига образуются следующие измеренные величины углов фазового сдвига:
ϕ - смещение  относительно
относительно  ;
; - смещение
- смещение  относительно
относительно  ;
; - смещение
- смещение  относительно
относительно  ;
;
Δεr - смещение  относительно
относительно  ;
; - смещение
- смещение  относительно
относительно  .
.
Одновременно выходные сигналы одного из пяти преобразователей 31-35 декартовых координат (стационарно или поочередно) поступают на входы первого преобразователя 3 декартовых координат, в котором происходит преобразование измеренных токов isα,isβ в измеренные амплитуды Isyn, Iort синфазного и ортофазного токов согласно преобразованию (2).
Измеренные амплитуды тока Ism и напряжения Usm подаются на входы блока 36 вычисления активной мощности и блока 37 вычисления реактивной мощности, на другие входы которых поступают сигналы соответственно cosϕ,sinϕ угла ϕ фазового сдвига тока  относительно напряжения
относительно напряжения  .
.
Так как сигнал cosϕ, поступающий с выхода преобразователя 26, имеет известный физический смысл коэффициента мощности электромеханического преобразователя, то произведение трех входных величин Usm, Ism, cosϕ, определяемое в блоке 36 вычисления активной мощности, образует измеренную величину мгновенной активной мощности P электромеханического преобразователя:
где m - число фаз электромеханического преобразователя энергии.
Аналогично в блоке 37 вычисления реактивной мощности производится перемножение трех входных величин, образующих измеренную величину мгновенной реактивной мощности согласно выражению:
От известных понятий активной и реактивной мощности физические понятия мгновенной активной и реактивной мощности справедливы не только для статических режимов, но и в динамических режимах электромеханического преобразователя при электромагнитных переходных процессах.
Функциональные возможности устройства векторной ориентации могут быть расширены двумя дополнительными преобразованиями измерительной информации, выполненными на трех блоках 38, 39, 40 умножения и двух узлах 41, 42 деления.
Измеренная амплитуда тока Ism с выхода первого блока 5 модуля подается на вход первого блока 38 умножения, на второй вход которого поступает сигнал  с выхода третьего преобразователя 27 декартовых координат. На вход второго блока 39 умножения поступает измеренная амплитуда потокосцепления статора ψsm с выхода третьего блока 7 модуля. В результате перемножения трех входных сигналов на выходе второго блока 39 умножения образуется величина измеренного электромагнитного момента М электромеханического преобразователя энергии согласно выражению:
с выхода третьего преобразователя 27 декартовых координат. На вход второго блока 39 умножения поступает измеренная амплитуда потокосцепления статора ψsm с выхода третьего блока 7 модуля. В результате перемножения трех входных сигналов на выходе второго блока 39 умножения образуется величина измеренного электромагнитного момента М электромеханического преобразователя энергии согласно выражению:
где Zp - число пар полюсов электромеханического преобразователя энергии.
На три входа третьего блока 40 умножения поступают измеренная амплитуда тока статора Ism, измеренная амплитуда тока ротора Irm, измеренная синусная функция sinΔεr , в результате чего на выходе первого узла 41 деления образуется измеренная величина взаимоиндуктивности Lm электромеханического преобразователя энергии согласно выражению:
На входы второго узла 42 деления поступают измеренная амплитуда потокосцепления в воздушном зазоре ψmm и измеренная величина индуктивности Lm, в результате чего на выходе второго узла 42 деления образуется измеренная амплитуда тока намагничивания Imm, фаза которого совпадает с фазой ψm вектора потокосцепления в воздушном зазоре  .
.
Описанное устройство векторной ориентации осуществляет контроль тока в координатах пяти векторов состояния, векторный контроль электромагнитных переходных процессов и векторный контроль фазовых смещений токов и потокосцеплений в соответствии с приведенным выше законом электромеханики об условии электромеханического преобразования энергии.
Параметры вектора тока наблюдаются относительно (в координатах) других векторов состояния, в этом смысле описанное устройство представляет собой векторный наблюдатель как вектора тока, так и в целом электромеханического преобразователя.
При подключении к описанным выходам устройства векторной ориентации внешних типовых измерительных и регистрирующих приборов, а также монитора (на фиг. 3 не показаны) измеряются, регистрируются и визуально наблюдаются все электромагнитные переходные процессы и установившиеся режимы электромеханического преобразователя энергии, например, синхронной или асинхронной электрической машины, как в генераторном, так и в двигательном режимах работы. На мониторе визуально наблюдается так называемый "веер векторов", изображенный на фиг. 1, с изменяемой раздвижкой векторов по длине и углам, характеризующий эффективность электромеханического преобразования энергии в соответствии с вышеприведенным законом электромеханики.
Одновременно устройство векторной ориентации может быть подключено в качестве универсальной многоканальной векторной обратной связи в систему автоматического регулирования синхронного или асинхронного электродвигателя, как показано на фиг. 3.
Силовой преобразователь 43 (фиг. 3) содержит тиристорные или транзисторные ключи, которые переключаются таким образом, чтобы действительные фазные токи isa, isb, isc в статорных обмотках электродвигателя отслеживали заданные токи i
Регулирование синфазного и ортофазного токов производится в координатах x, y одного из векторов состояния благодаря тому, что с выходов устройства векторной ориентации (векторной обратной связи) поступают обратные связи измеренного единичного вектора  фазы синхронизации ϕs и измеренных амплитуд синфазного и ортофазного токов Isyn, Iort в координатах одного или нескольких измеренных векторов состояния, или поочередно всех векторов состояния, измеренных в устройстве векторной ориентации. Одновременно указанное устройство может использоваться как для описанного регулирования, так и для наладки и диагностики регулируемых электроприводов с векторным регулированием в динамических и статических режимах работы электропривода.
фазы синхронизации ϕs и измеренных амплитуд синфазного и ортофазного токов Isyn, Iort в координатах одного или нескольких измеренных векторов состояния, или поочередно всех векторов состояния, измеренных в устройстве векторной ориентации. Одновременно указанное устройство может использоваться как для описанного регулирования, так и для наладки и диагностики регулируемых электроприводов с векторным регулированием в динамических и статических режимах работы электропривода.
Устройство применимо для повышения точности и энергетических показателей электроприводов с векторным регулированием и оптимальным векторным регулированием, в том числе работающих с различной регулируемой степенью насыщения магнитопровода, включая зону сильного насыщения, в которой используется в том числе измеренная текущая величина взаимоиндуктивности Lm с выхода первого узла 41 деления и измеренная величина амплитуды тока намагничивания Imm с выхода второго узла 42 деления.
В тяговых моментных электроприводах, в том числе электровозов и электромобилей используется в качестве обратной связи измеренный электромагнитный момент М с выхода второго блока 39 умножения на вход регулятора момента тягового электропривода.
Такое универсальное векторное наблюдение (векторный мониторинг) и векторное регулирование совокупности векторов состояния, смещаемых друг относительно друга, по аналогии с известным термином "мониторинг" названо "векторингом". Устройство векторной ориентации, выполняющее функцию "векторинг", именуется одноименным термином "векторинг" ("векторное кольцо - вращатель").
Векторинг может быть выполнен в микропроцессорном исполнении с использованием типовых стандартных микропроцессоров.
С целью снижения аппаратных затрат и габаритов при одновременном повышении быстродействия и точности векторных преобразований аналогичных сигналов датчиков тока и напряжения целесообразно выполнить устройство векторной ориентации ("векторинг") на типовом
цифровом сигнальном процессоре DSP (Digitak Signal Processor), например одного из типов ADSP 2181, ADSP 2115, TMS 320C20, TMS320C25-50 и типовом цифровом сигнальном сопроцессоре MC (Motion Coprocssor), например типов ADMC200, ADMC201.
Схема такого микропроцессорного устройства векторной ориентации ("векторинга") приведена на фиг.4.
В электрическую линию, связанную с электрическим преобразователем 1 (фиг. 4), подключены датчик 2 тока и датчик 4 напряжения, выходы которых соединены с микропроцессорным устройством "векторинг", состоящим из цифрового сигнального процессора 47, двух цифровых сигнальных сопроцессоров 48, 49 и блока 50 программируемой постоянной памяти, соединенный входами и выходами между собой шиной данных 51 и шиной адреса 52.
Выходы датчика 2 тока соединены с аналоговыми входами первого цифрового сигнального сопроцессора 48. Выходы датчика 4 напряжения соединены с аналоговыми входами второго цифрового сигнального сопроцессора 49.
Первый и второй сигнальный сопроцессоры 48, 49 содержат блоки 53, 54 векторных преобразований и блоки 55, 56 аналого-цифрового преобразования. Первый цифровой сигнальный сопроцессор 53 содержит блок 57 управления силовым преобразователем. Блоки 53, 54, 55, 56 объединены шиной данных 51 и шиной адреса 52, к которым могут подключаться интерфейсные устройства измерения векторов состояния и (или) управления векторными параметрами электромеханического преобразователя 1 энергии.
Выходы блока 57 управления силовым преобразователем первого сигнального сопроцессора 48 могут подключаться в управляющим входам силового преобразователя 43, тиристорые или транзисторные ключи которого переключают напряжение статора электромеханического преобразователя 1 энергии.
Микропроцессорное устройство "векторинг" по схеме на фиг. 4 выполнено на типовых серийных цифровых сигнальных процессорах и сопроцессорах, типовых серийных микросхемах программируемой постоянной памяти и представляет собой малогабаритную плату, встраиваемую в измерительный прибор, компьютер или в преобразователь электропривода.
Микропроцессорное устройство векторной ориентации (фиг. 4) работает следующим образом.
Аналоговые сигналы измеренного тока электромеханического преобразователя 1 поступают с выходов датчика 2 тока на аналоговые входы первого цифрового сигнального сопроцессора 53, образованные аналоговыми входами блока 55 цифроаналогового преобразования, встроенного в указанный сопроцессор 53.
Аналоговые сигналы измеренного напряжения поступают с выходов датчика 4 напряжения на аналоговые входы второго цифрового сигнального сопроцессора 49 образованные аналоговыми входами блока 56 цифро-аналогового преобразователя.
В блоках 55, 56 цифроаналоговых преобразований производится преобразование входной измерительной аналоговой информации о величинах токов и напряжений в цифровые коды измеренных токов и напряжений (например, в 11-разрядный код с временем выборки 8 микросекунд для сопроцессора типа ADMC200, обладающего быстродействием 12,5 МГц). Данные заносятся в регистры и хранятся до поступления команд с цифрового сигнального процессора 47, в котором производятся вычислительные операции (возведение в квадратную степень, суммирование, извлечение корня квадратного, деление, интегрирование) согласно приведенным выше уравнениям (например, в 16-разрядном цифровом коде). Образованные в результате вычислений шесть величин амплитуд Ism, Usm, ψsm,ψrm , irm, ψmm и шесть величин фаз ε,γ,ψs,ψr,εr,ψm, хранятся в регистрах и по программе поступают в блоки 53, 54 векторных преобразований. Программное обеспечение вычислительных процессов и константы данных вносятся и хранятся во внешнем блоке 50 программируемой постоянной памяти. Полученные в результате вычислений нормированные косинусные и синусные функции фаз подаются в блоки 53, 54 векторных преобразований, в которых вычисляются углы фазовых сдвигов 
 Блоки 53, 54 векторных преобразований, встроенные, например, в типовые серийные сопроцессоры ADMC200, ADMC201, выполняют одновременно функции прямого и обратного векторных преобразований a,b,c ←→ α,β, x,y ←→ α,β, что увеличивает быстродействие и точность векторных преобразований, необходимых для описанной выше векторной ориентации тока и определения амплитуд Iort, Isyn синфазного и ортофазного токов, синхронизированных поочередно фазами пяти векторов состояния γ,ψs,ψr,εr,ψm. . Блок 53 векторных преобразований вычисляет амплитуды синфазного и ортофазного токов Isyn, Iort, которые могут поступать в блок 57 управления силовым преобразователем при применении микропроцессорного устройства "векторинг" в качестве векторной обратной связи электропривода, содержащего силовой преобразователь 43.
Блоки 53, 54 векторных преобразований, встроенные, например, в типовые серийные сопроцессоры ADMC200, ADMC201, выполняют одновременно функции прямого и обратного векторных преобразований a,b,c ←→ α,β, x,y ←→ α,β, что увеличивает быстродействие и точность векторных преобразований, необходимых для описанной выше векторной ориентации тока и определения амплитуд Iort, Isyn синфазного и ортофазного токов, синхронизированных поочередно фазами пяти векторов состояния γ,ψs,ψr,εr,ψm. . Блок 53 векторных преобразований вычисляет амплитуды синфазного и ортофазного токов Isyn, Iort, которые могут поступать в блок 57 управления силовым преобразователем при применении микропроцессорного устройства "векторинг" в качестве векторной обратной связи электропривода, содержащего силовой преобразователь 43.
Вычислительные операции микропроцессорного устройства по схеме на фиг. 4 аналогичны последовательности вычислений, описанной выше для устройства векторной ориентации по схеме на фиг. 3.
Так как процесс расчета одного цикла всех преобразований в микропроцессорном устройстве по фиг. 4 составляет величину нескольких десятков микросекунд (40-50 мкс), то повышается точность векторной ориентации тока и расширяются функциональные возможности устройства векторной ориентации за счет возможностей многократного переключения фазы ϕs синхронизации тока поочередно на фазы пяти векторов состояния  за один рабочий интервал времени Δt регистрации измерения или за один период переключения силового преобразователя при векторном регулировании.
за один рабочий интервал времени Δt регистрации измерения или за один период переключения силового преобразователя при векторном регулировании.
Увеличение точности и расширение функциональных возможностей микропроцессорного устройства векторной ориентации достригается также за счет пошагового цифрового вычислительного процесса векторной ориентации, позволяющего на каждом последующем шаге расчета вносить уточнение параметра взаимоиндуктивности Lm, рассчитанной в предыдущем шаге расчета. При увеличении амплитуды тока намагничивания Imm и увеличении амплитуды потокосцепления в воздушном зазоре ψmm взаимоиндуктивность Lm уменьшается тем значительнее, чем выше ψmm по кривой намагничивания магнитопровода электромеханического преобразователя.
При этом изменяются и зависящие от Lm другие параметры Lr, Ls,  Kr, Ks, вносимые вначале в качестве базы данных в программное обеспечение векторной ориентации для заданного типа электромеханического преобразователя.
Kr, Ks, вносимые вначале в качестве базы данных в программное обеспечение векторной ориентации для заданного типа электромеханического преобразователя.
В микропроцессорном устройстве возможно пошаговое обращение к результату расчета Lm, Lr, Ls,  Kr, Ks, и пошаговый перенос результатов в последующий шаг расчета векторной ориентации, а также при достаточном быстродействии возможен итерационный процесс расчета векторной ориентации до сходимости всех параметров с требуемой точностью, включая параметры M, Lm, Imm.
Kr, Ks, и пошаговый перенос результатов в последующий шаг расчета векторной ориентации, а также при достаточном быстродействии возможен итерационный процесс расчета векторной ориентации до сходимости всех параметров с требуемой точностью, включая параметры M, Lm, Imm.
Реализуемые в различных устройствах по схемам на фиг. 3, 4 взаимосвязанные действия, операции и процессы измерения в описанной общей последовательности операций векторной ориентации характеризуют способ векторной ориентации тока электромеханического преобразователя.
Сущность способа заключается в измерении фазовых смещений токов и потокосцеплений преобразователя энергии в соответствии со сформулированным законом электромеханики: "электромеханическое преобразование энергии происходит при фазовом и пространственном смещении токов и потокосцеплений электромеханического преобразователя энергии". Измерение, наблюдение и регулирование фазового смещения тока  относительно потокосцеплений и тока
относительно потокосцеплений и тока  осуществляется векторной ориентацией тока
осуществляется векторной ориентацией тока  в координатах каждого из других векторов состояния, с последующим измерением, наблюдением и регулированием в координатах векторов состояния синфазных и ортофазных токов, разность которых равна действующему току
в координатах каждого из других векторов состояния, с последующим измерением, наблюдением и регулированием в координатах векторов состояния синфазных и ортофазных токов, разность которых равна действующему току  .
.
Для этого измеряют ток и напряжение, по измеренным величинам напряжения и тока вычисляют измеренные амплитуды и фазы тока и напряжения, кроме того, фазные величины потокосцепления статора в виде интеграла разности измеренных величин напряжения и тока, фазные величины, фазу и амплитуду потокосцепления статора, потокосцепления ротора, тока ротора, потокосцепления в воздушном зазоре, затем делением измеренных фазных величин на соответствующие амплитуды вычисляют нормированные с единичной амплитудой косинусные и синусные функции полученных фаз векторов состояния электромеханического преобразователя и измеряют синфазные и ортофазные токи и углы фазового сдвига (фазового смещения) вектора тока относительно векторов состояния путем задания фазы синхронизации тока равной одной из полученных фаз или каждой из полученных фаз векторов состояния электромеханического преобразователя.
К векторам состояния относятся все электрические и магнитные параметры (напряжение, ток ротора, потокосцепления статора, ротора и в воздушном зазоре), характеризующие электромеханическое преобразование энергии и имеющие векторное представление (угол и модуль вектора, соответствующие фазе и амплитуде).
Так как ток намагничивания  совпадает по направлению с потокосцеплением в воздушном зазоре
совпадает по направлению с потокосцеплением в воздушном зазоре  (фиг. 1), то операция измерения вектора потокосцепления в воздушном зазоре
(фиг. 1), то операция измерения вектора потокосцепления в воздушном зазоре  и его фазы ψm выполняет одновременно функцию измерения фазы ψm тока намагничивания.
и его фазы ψm выполняет одновременно функцию измерения фазы ψm тока намагничивания.
Поэтому описанное измерение тока намагничивания как скалярной величины, равной амплитуде тока намагничивания Imm, достаточно для измерения вектора тока намагничивания  , показанного на фиг. 1.
, показанного на фиг. 1.
Измерение амплитуды тока намагничивания Imm и соответствующей степени насыщения магнитопровода взаимоиндуктивности Lm производится путем предварительного измерения электромагнитного момента М по полученным параметрам векторной ориентации.
Электромагнитный момент М измеряют в виде произведения измеренной амплитуды ортофазного тока Iort, пропорционального синусной функции фазы потокосцепления статора sinψs на величину амплитуды потокосцепления статора ψs.
Текущую величину взаимоиндуктивности измеряют путем деления величины измеренного электромагнитного момента М на величину произведения амплитуды ортофазного тока, пропорциональной синусной функции фазы тока ротора sinεr, на величину амплитуды тока ротора Irm.
Амплитуду тока намагничивания Imm, измеряют путем деления измеренной величины амплитуды потокосцепления в воздушном зазоре ψmm на измеренную текущую величину взаимоиндуктивности Lm.
Фазовое смещение токов  и потокосцеплений
и потокосцеплений 
 контролируемое в предложенном способе векторной ориентации тока в соответствии с законом электромеханики, полностью характеризует пространственное смещение токов и потокосцеплений электромеханического преобразования энергии в статических и динамических режимах электрических машин (генераторов и электродвигателей) с учетом электромагнитных переходных процессов и явления нелинейного магнитного насыщении магнитопровода электрической машины.
контролируемое в предложенном способе векторной ориентации тока в соответствии с законом электромеханики, полностью характеризует пространственное смещение токов и потокосцеплений электромеханического преобразования энергии в статических и динамических режимах электрических машин (генераторов и электродвигателей) с учетом электромагнитных переходных процессов и явления нелинейного магнитного насыщении магнитопровода электрической машины.
Технический результат, достигнутый в изобретении, выражается в том, что, подключая лишь датчик тока и датчик напряжения в электрической линии, связанной со статорной обмоткой электромеханического преобразователя (генератора, электродвигателя) без датчиков, связанных с электромеханическим преобразователем, производится измерение, наблюдение и возможное регулирование фаз всех электрических и электромагнитных переменных состояний, а также углов фазового сдвига тока относительно всех других физических переменных состояния электромеханического преобразователя электроэнергии, производится измерение ортофазных и синфазных токов, электромагнитного момента, текущей взаимоиндуктивности и тока намагничивания.
Решение технической задачи и поставленная цель достигаются тем, что повышается точность ориентации вектора тока относительно других векторов состояния за счет взаимосвязанного измерения фаз токов, напряжений и потокосцеплений и углов фазового сдвига вектора тока, адекватных физическим процессам пространственного углового положения и пространственного углового смещения векторов состояния электромеханического преобразования энергии с учетам описанных в [3-8] электромагнитных процессов их взаимодействия и явления магнитного насыщения.
Решение задачи и цель достигаются в части расширении функциональных возможностей там, что в результате векторной ориентации тока, измерений и преобразований производится не только измерение фаз и углов фазового сдвига, но и измерение, наблюдений и возможное регулирование всех амплитуд электрических и магнитных переменных состояний электромеханического преобразователя, величины электромагнитного момента и взаимоиндуктивности электромеханического преобразователя.
Функциональные возможности расширяются также за счет возможности поочередной ориентации тока в координатах любых векторов состояния электромеханического преобразователя (напряжения, трех видов потокосцеплений, тока ротора) и измерение амплитуд синфазного и ортофазного токов в координатах любого вектора состояния.
Расширение функциональных возможностей происходит за счет дополнительного измерения мгновенных величин коэффициента мощности (cosϕ), активной и реактивной мощности, электромагнитного момента, тока намагничивания и взаимоиндуктивности, что в комплексе характеризует эффективность электромеханического преобразования энергии, его основные энергетические показатели и степень использования магнитопровода.
Техническая применимость изобретения обусловлена общей применимостью электрических машин, необходимостью контроля их режимов и использованием соотношений для обобщенной электрической машины между токами, напряжениями и потокосцеплениями, описанными в [4-8].
Наибольшая эффективность применения изобретения достигается в следующих технических системах:
- электроприводы с векторным регулированием магнитного потока, тока ротора, момента, скорости, углового положения (векторная обратная связь по нескольким векторам одновременно);
- техническая основа нового типа контрольно-измерительного (или регистрирующего) прибора "Векторинг";
- векторный анализатор режимов электрических машин;
- техническая основа программно-отладочного комплекса испытательных и наладочных стендов для наладки и испытания микропроцессорных электроприводов;
- измеритель мгновенного коэффициента мощности и тока намагничивания (не только для установившихся режимов, но и для динамических режимов генераторов, синхронных компенсаторов, электродвигателей, регулируемых электроприводов);
- измеритель электромагнитного момента электромеханического преобразователя;
- измеритель степени насыщения магнитопровода и определитель текущей рабочей точки на кривой намагничивания электрических машин;
- техническая основа системы контроля и регулирования режимов генераторов на электростанциях;
- техническая основа системы контроля и регулирования работы синхронных компенсаторов в системах электроснабжения;
- прибор контроля и диагностики для асинхронных и синхронных электродвигателей, в том числе работающих в труднодоступных, химически активных, жидкостных и радиоактивных средах.
Техническая применимость изобретения в перечисленных областях не зависит от использованной частоты тока, так как фазы и амплитуды измеряются как при нулевой частоте, так и при любой постоянной частоте, или при изменяемой в любом диапазоне частоте тока, что позволяет применять изобретение как универсальное средство контроля и регулирования для всех типов электромеханических преобразователей энергии независимо от их назначения.
Источники информации
1. Патент РФ N 1458951, кл.4, H 02 М 7/40, 15.02.89. Бюл. N 6. В.А. Мищенко, Н.И.Мищенко, "Способ управления многофазным инвертором и устройство для его осуществления". Приоритет 26.03.84 г. Действует с 01.07.91 г. взамен авторского свидетельства (аналог).
2. Авторское свидетельство СССР N 1681371, кл.5, H 02 P 5/40, 30.09.91. Бюл. N 36. В. А.Мищенко, Н.И.Мищенко, "Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе". Приоритет 31.03.87 г. (прототип).
3. Патент РФ N 1458962, кл.4, H 02 P 7/42, 15.02.89. Бюл. N 6 В.А.Мищенко, "Способ управления асинхронным электроприводом и устройство для его осуществления". Приоритет 26.03.84 г.
4. Patent USA N 4926105, kl. 5 H 02 P 5/40, V.A. Mischenko, N.I.Mischenko. "Method of induction motor control and electric drive realizing this method.
5. Patent Bundesrepublik Deutschland N 3744905, kl 5, H 02 P 7/44 10.10.91 V. A. Mischenko, N. I. Mischenko, "Verfahren und Vorrichtung zur Steuerung eines umrichtergespeisten Asynchronmotors".
6. R.H. Park "Two-Reaction Theory of Synchronous Machines", Transactions AIEE, Part 1.1929 p. 716; Part II. 1933 p. 352.
7. Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. ГЭИ, Москва, 1963, стр. 744.
8. Копылов И.П. Математическое моделирование электрических машин. Москва, "Высшая школа", 1987, стр. 248.
Изобретение относится к информационно-измерительной технике и электротехнике, в частности к измерению параметров тока и к управлению током электромеханического преобразователя, например, для синхронных, синхронно-реактивных и асинхронных электрических машин. Техническим результатом является обеспечение точности векторной ориентации тока и универсальности функциональных возможностей, что обеспечивается способом векторной ориентации тока, при котором фазы и амплитуды векторов состояния электромеханического преобразователя (тока статора и ротора, напряжения, потокосцеплений статора, ротора и в воздушном зазоре) вычисляют в зависимости от интеграла разности измеренных величин напряжения и тока, затем делением фазных величин на величины амплитуд вычисляют синусные и косинусные функции фаз векторов состояния электромеханического преобразователя и измеряют синфазные и ортофазные токи и углы фазового сдвига вектора тока относительно полученных фаз векторов состояния. Дополнительно измеряют электромагнитный момент в виде произведения измеренной амплитуды ортофазного тока, пропорционального синусной функции фазы потокосцепления статора на величину амплитуды потокосцепления статора, кроме того, измеряют степень насыщения магнитопровода и взаимоиндуктивность путем деления величины измеренного электромагнитного момента на величину произведения амплитуды ортофазного тока на величину амплитуды тока ротора, амплитуду тока намагничивания измеряют путем деления измеренной амплитуды потокосцепления в воздушном зазоре на измеренную величину взаимоиндуктивности. Устройство для осуществления способа содержит датчик тока и напряжения, подключенные ко входам цифрового сигнального процессора, включающего блоки модуля, блоки деления, сумматоры, интегратор, преобразователи декартовых координат, блоков угла фазового сдвига, блоки вычисления активной и реактивной мощности, блоки умножения, преобразователь координат. 2 с. и 5 з.п. ф-лы, 4 ил.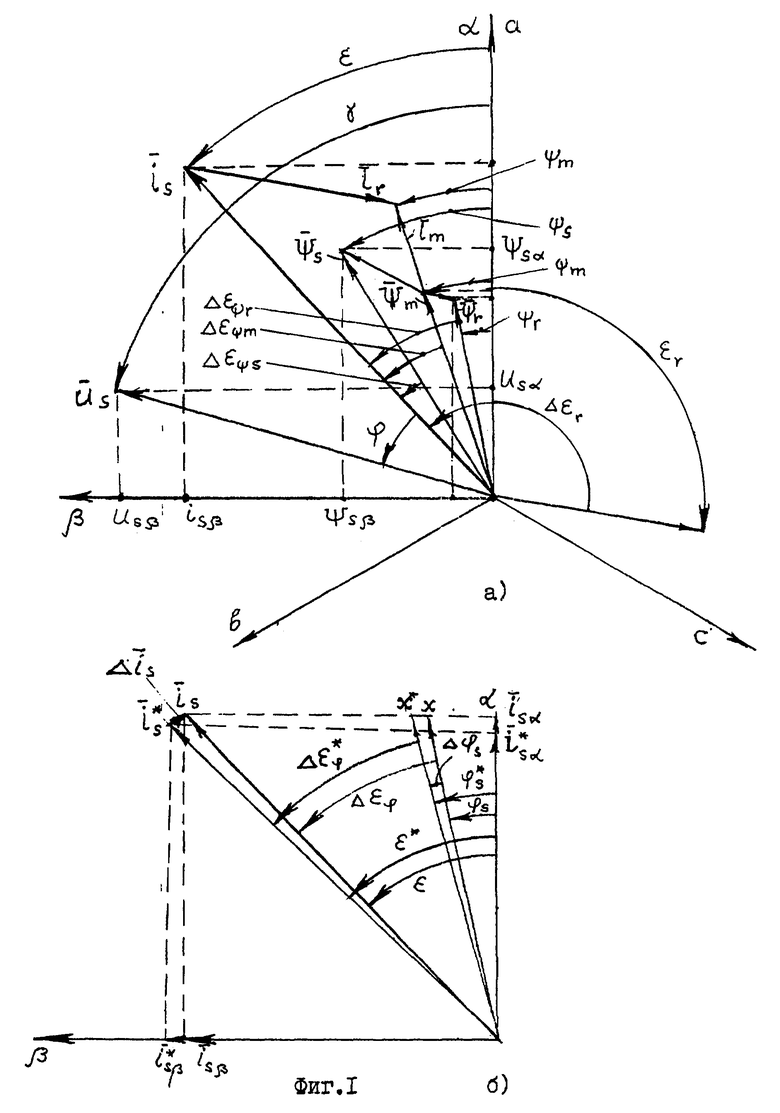
Ψsα = ∫(Usα-Rsisα)dt,
Ψsβ = ∫(Usβ-Rsisβ)dt,
где Ψsα, Ψsβ, isα, isβ, Usα, Usβ - соответственно потокосцепление статора, ток и напряжение в двухфазной системе координат;
Rs - активное сопротивление фазной обмотки электромеханического преобразователя,
вычисляют фазы и амплитуды потокосцепления статора, ротора, тока ротора, потокосцепления в воздушном зазоре, затем вычисляют нормированные с единичной амплитудой косинусные и синусные функции фаз указанных векторов и синфазные и ортофазные токи и углы фазового сдвига вектора тока относительно любого из указанных векторов путем задания фазы синхронизации тока, равной полученной фазе одного из векторов состояния или поочередно каждой из полученных фаз векторов состояния электромеханического преобразователя.
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| US 4926105 A, 17.02.87 | |||
| Устройство для изучения дифракции медленных электронов | 1934 |
|
SU43973A1 |
| CH 6811231 A, 24.09.92. | |||
