Изобретение относится к техническим средствам обнаружения и может быть использовано для поиска радиоуправляемых взрывных устройств (РВУ).
Для поиска радиоуправляемых взрывных устройств применяются различные нелинейные радиолокаторы (НРЛ). Их принцип действия основан на облучении обследуемых объектов короткими радиочастотными импульсами и приеме сигналов-откликов (переизлученных сигналов) на частотах второй и третьей гармоник зондирующего излучения [1, 2, 3].
Сигналы-отклики на частотах второй и третьей гармоник зондирующего излучения появляются в результате спектрального преобразования зондирующего сигнала на элементах с нелинейной вольтамперной характеристикой. Такой характеристикой обладают полупроводниковые элементы, входящие в состав радиоэлектронных устройств.
При облучении радиоэлектронных устройств в спектре переизлученного сигнала, как правило, преобладают четные гармонические составляющие зондирующего излучения (вторая гармоника).
Полупроводниковыми свойствами обладают также контакты металлических предметов, особенно, подвергнувшихся коррозии. При облучении таких объектов в спектре переизлученного сигнала, как правило, преобладают нечетные гармонические составляющие зондирующего излучения (третья гармоника).
По соотношению уровней сигналов-откликов на частотах второй и третьей гармоник частоты зондирования можно отличить объекты, содержащие электронные схемы с полупроводниковыми элементами, от объектов, выполненных из металла.
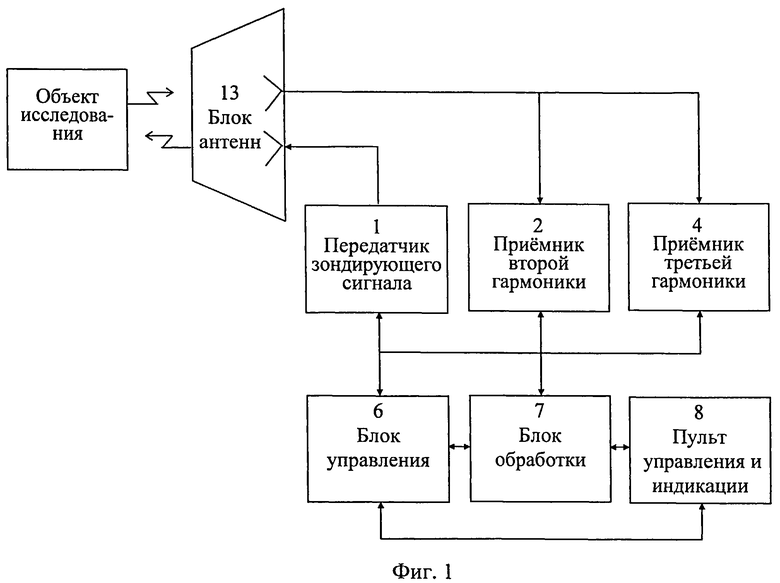
Известен нелинейный радиолокатор NR-900EK, состоящий из передатчика 1 зондирующего сигнала, двух приемников 2 и 4 (2-й и 3-й гармоник соответственно) зондирующего сигнала, настроенных на удвоенную и утроенную частоту сигнала передатчика, блока 6 управления, блока 7 обработки, блока 13 антенн (приемной и передающей) и пульта 8 управления и индикации (фиг. 1) [2, 3].
Местоположение обнаруженного РВУ определяется оператором, ведущим поиск приблизительно по направлению блока антенн на участок местности. Таким образом, для поиска обнаруженного РВУ необходимо вручную обследовать большой участок местности, что приводит к значительному снижению темпов ведения разведки инженерными подразделениями федеральных сил, а, следовательно, и эффективности выполнения боевых задач [2, 3].
Недостатком НРЛ NR-900EK является отсутствие указания места нахождения обнаруженного РВУ и расстояния до него.
Целью изобретения является повышение эффективности поиска РВУ.
Для достижения поставленной цели решается задача - создание нелинейного радиолокатора с целеуказателем и дальномером, который позволит оператору более точно определять участок местности, на котором установлено РВУ, и значительно сократить время на его поиск.
В качестве целеуказателя применяется лазерная указка (лазерный прицел), а в качестве дальномера - частотный измеритель дальности.
Для создания нелинейного радиолокатора с целеуказателем и дальномером предлагается дополнить существующее устройство НРЛ NR-900EK двумя фазовыми детекторами, микроконтроллером, приемной антенной с приемниками второй и третьей гармоник, сравнивающим мостом, генератором сигнала, частотным дальномером и лазерным целеуказателем, жестко закрепленным на электронном поворотном устройстве (ЭПУ), при этом не изменяя работу передатчика зондирующего сигнала, двух приемников, настроенных па удвоенную и утроенную частоту сигнала передатчика, блока управления, блока обработки, блока антенн (приемной и передающей) и пульта управления и индикации, дополнительно лишь на панели которого разместить дисплей 20×4, отображающий дальность до РВУ.
Сущность изобретения поясняется чертежами, где на:
- фиг. 1 представлена структурная схема НРЛ NR-900EK [2, 3];
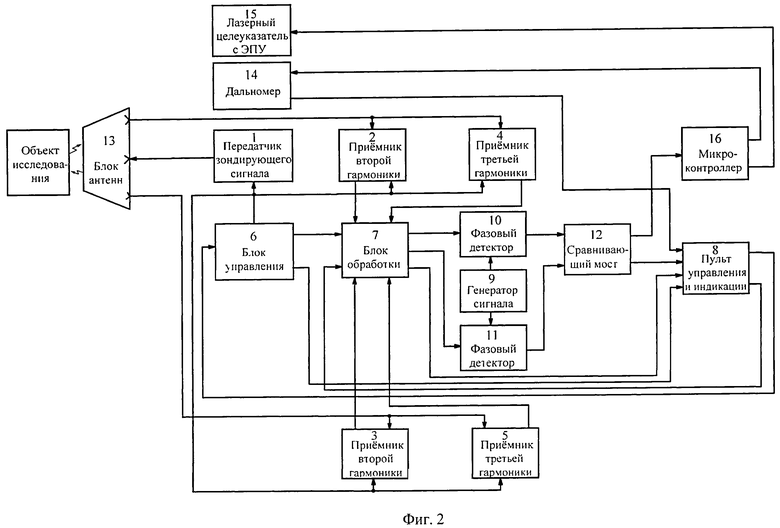
- фиг. 2 - структурная схема предлагаемого нелинейного радиолокатора с целеуказателем и дальномером.
Предлагаемое устройство состоит из передатчика 1 зондирующего сигнала, приемников 2 и 3 второй и приемников 4 и 5 третьей гармоник зондирующего сигнала, настроенных на удвоенную и утроенную частоту сигнала передатчика 1 соответственно, блока 6 управления, блока 7 обработки, пульта 8 управления и индикации, генератора 9 сигнала, фазовых детекторов 10 и 11, сравнивающего моста 12, блока 13 антенн, частотного дальномера 14, лазерного целеуказателя 15 с электронным поворотным устройством и микроконтроллера 16.
Передатчик 1 зондирующего сигнала своим входом соединен с выходом блока 6 управления, а выходом - с входом блока 13 антенн (передающей антенной) и предназначен для формирования зондирующего сигнала, представляющего собой короткие радиочастотные импульсы и необходимого для создания зоны обнаружения.
Приемники 2, 3, 4 и 5 своими входами соединены с приемными антеннами, а выходами - со входами блока 7 обработки и предназначены для усиления сигналов-откликов, поступивших с антенн, и выделения их четной и нечетной гармоник. Приемники 2 и 3 настроены на выделение из принятого отклика сигнала, равного удвоенной частоте сигнала передатчика, а приемники 4 и 5 - сигнала, равного утроенной частоте.
Блок 6 управления своим входом соединен с выходом пульта 8 управления и индикации, а выходами - с входами передатчика 1 зондирующего сигнала, приемников 2, 3, 4 и 5 2-й и 3-й гармоник, блока 7 обработки и пульта 8 управления и индикации и необходим для управления их работой, осуществления подключений и отключений блоков для обеспечения работы устройства.
Блок 7 обработки своими входами соединен с выходами блока 6 управления, приемников 2, 3, 4 и 5, пульта 8 управления и индикации, выходами - со входами фазовых детекторов 10 и 11 и пульта 8 управления и индикации и предназначен для обработки сигналов с приемников и определения их уровней с последующей передачей этих сигналов на пульт 8 управления и индикации.
Пульт 8 управления и индикации своими входами соединен с выходами блока 6 управления, блока 7 обработки, сравнивающего моста 12, частотного дальномера 14, а выходами подключен ко входам блока 6 управления и блока 7 обработки и предназначен для формирования управляющих команд работы устройства, а также отображения данных режимов работы. Пульт 8 содержит две линейки по 16 светодиодов красного и зеленого цветов, обозначенных цифрами «2» и «3» (индикаторы уровня принимаемых сигналов-откликов второй и третьей гармоник зондирующего сигнала соответственно), кнопку «max», индикатор изменения излучаемой мощности передатчика 1 зондирующего сигнала, три кнопки ослабления уровней входных сигналов приемников 2, 3, 4 и 5 («-10», «-20», «-30»). Кроме этого, на пульте располагается дисплей, на котором отображается дальность до РВУ.
Генератор 9 сигнала своими выходами соединен со входами фазовых детекторов 10 и 11 и предназначен для формирования эталонного сигнала, необходимого для обеспечения работы фазовых детекторов 10 и 11.
Входы фазовых детекторов 10 и 11 подключены к выходам блока 7 обработки и генератора 9 сигнала, а выходы - ко входам сравнивающего моста 12. Детекторы 10 и 11 предназначены для сравнения фаз двух входных сигналов, один их которых подается с генератора 9 сигнала, а другой - с блока 7 обработки.
Сравнивающий мост 12 своими входами соединен со выходами фазовых детекторов 10 и 11, а выходами - со входами пульта 8 управления и индикации и микроконтроллера 16 и предназначен для сравнения фаз двух сигналов, определения установленного значения величины сигнала-отклика, а также формирования, в зависимости от результатов сравнения, сигнала, который подается на микроконтроллер 16.
Блок 13 антенн состоит из передающей антенны, своим входом соединенной с выходом передатчика 1 зондирующего сигнала и предназначенной для направленного излучения моногармонического сигнала в направлении объекта обследования, двух приемных антенн, своими выходами соединенных со входами приемников 2, 3, 4 и 5 2-й и 3-й гармоник, разнесенных относительно передающей антенны и предназначенных для приема сигналов-откликов от облученных зондирующим сигналом объектов.
Частотный дальномер 14 своим входом соединен с выходом микроконтроллера 16, выходом - со входом пульта 8 управления и индикации и предназначен для определения дальности (расстояния) до РВУ.
Лазерный целеуказатель 15 входом подключен к выходу микроконтроллера 16 и предназначен для светового указания обследуемого участка местности на предмет наличия на нем устройств, содержащих полупроводниковые элементы электронных схем. Он устанавливается на электронное поворотное устройство совместно с блоком 13 антенн.
Микроконтроллер 16 своим входом соединен с выходом сравнивающего моста 12, а выходами - с лазерным целеуказателем 15 с ЭПУ и частотным дальномером 14 и предназначен для управления их работой.
Устройство работает следующим образом.
После включения и подачи напряжения питания на устройство органами управления пульта 8 управления и индикации через блок 6 управления устанавливается необходимый уровень мощности излучения передатчика 1 зондирующего сигнала, а через блок 7 обработки - величина ослабления (10, 20 и 30 дБ) уровней входных сигналов приемников 2, 3, 4 и 5.
Передатчик 1 зондирующего сигнала и пульт 8 управления и индикации работают в режиме излучения. Для предотвращения выхода из строя приемников 2, 3, 4 и 5, а также блока 7 обработки на время передачи зондирующего сигнала они отключаются от блока 13 антенн блоком 6 управления. В момент приема переизлученного сигнала работают приемники 2, 3, 4 и 5, настроенные на удвоенную и утроенную частоту сигнала передатчика 1 зондирующего сигнала соответственно, блок 7 обработки, генератор 9 сигнала, фазовые детекторы 10 и 11, сравнивающий мост 12, пульт 8 управления и индикации, микроконтроллер 16, частотный дальномер 14 и лазерный целеуказатель 15 с электронным поворотным устройством. Таким образом, блок 6 управления осуществляет управление работой передающей и приемной частей нелинейного радиолокатора.
Передатчик 1 зондирующего сигнала по команде с блока 6 управления и с учетом установленного органами управления пульта 8 управления и индикации уровня мощности излучения формирует короткие зондирующие радиочастотные импульсы, которые подаются на направленную передающую антенну блока 13 антенн и излучаются в направлении обследуемого объекта.
Принятый приемными антеннами переизлученный сигнал-отклик поступает на входы приемников 2, 3, 4 и 5, где происходит его усиление. После усиления принятого сигнала-отклика из него в приемниках 2 и 3 происходит выделение сигнала, равного удвоенной частоте сигнала передатчика 1 (второй гармоники), соответствующего сигналу-отклику от радиоэлектронных устройств, а в приемниках 4 и 5 - выделение сигнала, равного утроенной частоте сигнала передатчика (третьей гармоники), соответствующего сигналу-отклику от металлических предметов, особенно подвергшихся коррозии.
С выходов приемников 2, 3, 4 и 5 выделенные сигналы поступают на блок 7 обработки.
Блок 7 обработки, используя установленные пультом 8 управления и индикации коэффициенты ослабления уровней входных сигналов приемников (10, 20 и 30 дБ), обрабатывает сигналы с приемников, определяет их уровни и передает обработанные сигналы на пульт 8 управления и индикации и фазовые детекторы 10 и 11, где происходит сравнение фаз входных сигналов с фазой сигнала генератору 9. С детекторов 10 и 11 сигналы поступают на сравнивающий мост 12, где происходит сравнение фаз поступивших двух сигналов и определение установленного значения величины сигнала-отклика, а также формирование сигнала в зависимости от результатов сравнения, который затем подается на микроконтроллер 16.
Микроконтроллер 16 подает сигнал управления на частотный дальномер 14, электронное поворотное устройство лазерного целеуказателя 15 и на включение непосредственно самого лазерного целеуказателя 15. Сенсор частотного дальномера 14 излучает импульс, который отражается от объекта, и принимает его. Дальность рассчитывается, исходя из времени до получения отклика (эха) и скорости звука в воздухе. При отсутствии сигнала с микроконтроллера 16 частотный дальномер 14 и целеуказатель 15 с электронным поворотным устройством не включаются.
На соответствующих индикаторах пульта 8 управления и индикации происходит отображение уровней сигналов, принятых от блока 7 обработки, а также расстояния, определенного частотным дальномером 14. Два индикатора уровней сигналов (две линейки диодов - 16 светодиодов красного и зеленого цветов, обозначенных цифрами «2» и «3») пульта 8 управления и индикации позволяют визуально определять уровни принимаемых сигналов-откликов второй и третьей гармоник зондирующего сигнала. По соотношению уровней сигналов второй и третьей гармоник оператор различает объекты, содержащие электронные схемы с полупроводниковыми элементами, и объекты, выполненные из металла.
Совокупность сигналов-откликов на частотах второй и третьей гармоник частоты зондирования и соотношение их уровней позволяют оператору делать вывод о характере обнаруженного объекта. При этом целеуказатель на электронном поворотном устройстве указывает местоположение РВУ, а дальномер - расстояние до него.
Предлагаемое изобретение позволяет повысить эффективность поиска РВУ за счет сокращения времени поиска путем определения их местоположения с помощью нелинейного радиолокатора с целеуказателем и дальномером на микроконтроллере.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Дикарев, В.И. Методы и средства обнаружения объектов в укрывающих средствах / В.И. Дикарев, В.А. Заренков. - СПб.: Наука и техника, 2004. - 280 с.
2. Переносной детектор нелинейных переходов «NR-900EK» / Руководство по эксплуатации. ЮТДН 468165003 РЭ. - ЗАО «Группа защиты - ЮТТА».
3. Интернет-сайт http://www/detektor.ru от 3.03.2014 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР С ЦЕЛЕУКАЗАТЕЛЕМ | 2011 |
|
RU2474840C2 |
| ИМПУЛЬСНЫЙ НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2499277C1 |
| Способ и устройство обнаружения радиоуправляемых взрывных устройств с применением беспилотного летательного аппарата | 2018 |
|
RU2745658C2 |
| НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР ОБНАРУЖЕНИЯ РАДИОЭЛЕКТРОННЫХ УСТРОЙСТВ | 2012 |
|
RU2510517C2 |
| РАДИОКОМПЛЕКС РОЗЫСКА МАРКЕРОВ | 1994 |
|
RU2108596C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА МИН И МИННЫХ ПОЛЕЙ НА ОСНОВЕ РАДИОЛОКАЦИОННОГО ПАРАМЕТРИЧЕСКОГО МЕТОДА | 2018 |
|
RU2681271C1 |
| Способ определения координат нелинейного рассеивателя комбинационным радиолокатором | 2024 |
|
RU2839938C1 |
| СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ЭЛЕКТРОННЫХ УСТРОЙСТВ С ПОЛУПРОВОДНИКОВЫМИ ЭЛЕМЕНТАМИ | 2010 |
|
RU2432583C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПОИСКА, СОДЕРЖАЩИХ МЕТАЛЛИЧЕСКИЕ КОНТАКТЫ, В НЕЛИНЕЙНЫХ РАДИОЛОКАТОРАХ БЛИЖНЕГО ДЕЙСТВИЯ | 2016 |
|
RU2614038C1 |
| СПОСОБ И УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2011 |
|
RU2474839C1 |
Изобретение относится к техническим средствам обнаружения и может быть использовано для поиска радиоуправляемых взрывных устройств (РВУ). Достигаемый технический результат - повышение эффективность поиска РВУ за счет сокращения времени поиска. Указанный результат достигается за счет того, что нелинейный радиолокатор состоит из передатчика зондирующего сигнала, приемников второй и третьей гармоник зондирующего сигнала, настроенных на удвоенную и утроенную частоту сигнала передатчика соответственно, блока управления, блока обработки, пульта управления и индикации, генератора сигнала, фазовых детекторов, сравнивающего моста, блока антенн, частотного дальномера, лазерного целеуказателя с электронным поворотным устройством и микроконтроллера, соединенных между собой определенным образом. 2 ил.
Нелинейный радиолокатор с лазерным целеуказателем и частотным дальномером, содержащий передатчик зондирующего сигнала, приемники второй и третьей гармоник, блок управления, блок обработки, блок антенн и пульт управления и индикации, где вход блока управления соединен с выходом пульта управления и индикации, выходы блока управления соединены со входами передатчика зондирующего сигнала, приемников второй и третьей гармоник, блока обработки и пульта управления и индикации, выход передатчика зондирующего сигнала соединен со входом блока антенн (передающей антенной), выход блока антенн (приемная антенна) соединен со входами приемников второй и третьей гармоник, выходы приемников второй и третьей гармоник соединены со входами блока обработки, выход которого подключен ко входу пульта управления и индикации, выход которого соединен со входом блока обработки, отличающийся тем, что дополнительно введены вторая приемная антенна, приемники второй и третьей гармоник, два фазовых детектора, генератор сигнала, сравнивающий мост, микроконтроллер, лазерный целеуказатель с электронным поворотным устройством и частотный дальномер, причем второй выход блока антенн (вторая приемная антенна) и выход блока управления соединены со входами приемников второй и третьей гармоник, выходы приемников соединены со входами блока обработки, выходы которого, наряду с выходами генератора сигнала, соединены со входами фазовых детекторов, выходы которых соединены со входами сравнивающего моста, выходы которого соединены со входами пульта управления и индикации и микроконтроллера, выходы которого соединены со входами лазерного целеуказателя с электронным поворотным устройством и частотного дальномера, выход которого для отображения дальности до цели соединен с дисплеем на пульте управления и индикации.
| НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР С ЦЕЛЕУКАЗАТЕЛЕМ | 2011 |
|
RU2474840C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕЛИНЕЙНОГО ОБЪЕКТА С РАСПОЗНАВАНИЕМ ТИПА НЕЛИНЕЙНОСТИ | 2001 |
|
RU2205419C2 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2009 |
|
RU2436115C2 |
| СПОСОБ И УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2011 |
|
RU2474839C1 |
| ИМПУЛЬСНЫЙ НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2499277C1 |
| WO 1996012201 A1, 25.04.1996 | |||
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2009 |
|
RU2436115C2 |
| US 5196854 A, 23.03.1993. | |||

