Изобретение относится к области нелинейной радиолокации, использующей сигнал, рассеянный нелинейным рассеивателем на частоте одной из гармоник или комбинационных нелинейных продуктов зондирующего сигнала, в качестве принимаемого полезного сигнала. Нелинейный рассеиватель - это обобщенное название целей в нелинейной радиолокации. Нелинейным рассеивателем называется класс объектов, содержащих в своей конструкции или в своем составе нелинейные элементы, присоединенные к проводникам. В результате воздействия зондирующего сигнала на нелинейный рассеиватель по указанным проводникам протекают токи на частоте зондирующего сигнала, в результате на нелинейных элементах наводятся ЭДС на частоте зондирующего сигнала. В силу нелинейного характера вольт-амперных характеристик нелинейных элементов, протекающие через них токи искажаются, в результате в спектре данных токов появляются новые спектральные составляющие на частотах гармоник или комбинационных составляющих зондирующего сигнала. Эти гармоники или комбинационные составляющие зондирующего сигнала протекая через проводники, присоединенные к нелинейным элементам, переизлучаются в пространство. Появление в спектре переизлученного сигнала указанных гармоник или комбинационных составляющих зондирующего сигнала является информационным признаком нахождения в зоне облучения нелинейного радиолокатора нелинейного рассеивателя. Рассеиваемые нелинейным рассеивателем сигналы очень слабые. Поэтому в качестве рабочих принимаемых сигналов используются нелинейные продукты второго или третьего порядков, как самые интенсивные, а для работы нелинейного радиолокатора принципиально предварительное очищение излучаемого зондирующего сигнала от паразитных нелинейных продуктов, и защита приемника от блокирования зондирующим сигналом путем фильтрации.
При поиске объектов с априори неизвестными свойствами определенными преимуществами перед нелинейными радиолокаторами, использующими в качестве рабочих принимаемых сигналов гармоники, обладают нелинейные радиолокаторы, использующие в качестве рабочих принимаемых сигналов комбинационные нелинейные продукты, как имеющие большее пространство возможностей для обследования нелинейного рассеивателя при усложнении конструкции. Такие нелинейные радиолокаторы получили в литературе по нелинейной радиолокации название комбинационных нелинейных радиолокаторов или двухчастотных нелинейных радиолокаторов.
Известен по [А.Ю. Дащенко, А.П. Дюгованец, А.В. Червинко Нелинейный радиолокатор с целеуказателем, патент RU 2474840 C2, 2011] Способ целеуказания нелинейного рассеивателя, по которому: нелинейным радиолокатором использующим в качестве принимаемого сигнала n-ю гармонику зондирующего сигнала, в направлении нелинейного рассеивателя излучаются, очищенные от побочных нелинейных продуктов, радиоимпульсы зондирующего сигнала в виде последовательности из М одинаковых простых радиоимпульсов зондирующего сигнала с периодом Т и длительностью  и частотой заполнения равной
и частотой заполнения равной  при этом, передний фронт первого радиоимпульса зондирующего сигнала является стартом для работы всех систем нелинейного радиолокатора, переизлученный объектом обследования сигнал-отклик принимается приемной антенной, из него выделяются и обрабатываются сигналы второй и третьей гармоник частоты зондирования, уровни сигналов которых выводятся на индикаторы блока индикации, по соотношению уровней сигналов-откликов на частотах второй и третьей гармоник частоты зондирования отличают объекты, содержащие электронные схемы с полупроводниковыми элементами, от объектов, выполненных из металла, сканируя в пространстве диаграммой направленности антенны принимаемого сигнала, по значению максимума определяют направление на нелинейный рассеиватель, что вместе с оценкой дальности позволяет оценить местоположение нелинейного рассеивателя, для этого детектор максимального сигнала определяет максимум сигнала-отклика на частоте второй гармоники и в момент его появления с помощью электронного ключа включает лазерный целеуказатель, который показывает местоположение радиоуправляемого взрывного устройства на местности.
при этом, передний фронт первого радиоимпульса зондирующего сигнала является стартом для работы всех систем нелинейного радиолокатора, переизлученный объектом обследования сигнал-отклик принимается приемной антенной, из него выделяются и обрабатываются сигналы второй и третьей гармоник частоты зондирования, уровни сигналов которых выводятся на индикаторы блока индикации, по соотношению уровней сигналов-откликов на частотах второй и третьей гармоник частоты зондирования отличают объекты, содержащие электронные схемы с полупроводниковыми элементами, от объектов, выполненных из металла, сканируя в пространстве диаграммой направленности антенны принимаемого сигнала, по значению максимума определяют направление на нелинейный рассеиватель, что вместе с оценкой дальности позволяет оценить местоположение нелинейного рассеивателя, для этого детектор максимального сигнала определяет максимум сигнала-отклика на частоте второй гармоники и в момент его появления с помощью электронного ключа включает лазерный целеуказатель, который показывает местоположение радиоуправляемого взрывного устройства на местности.
Описанный выше Способ целеуказания нелинейного рассеивателя выбран аналогом как способ, направленный на решение задачи определения координат нелинейного рассеивателя. Недостатком способа - аналога является низкая точность в определении дальности до нелинейного рассивателя: на выходе согласованного фильтра, полезный сигал выходит за уровень шумов, однако длительность  основного максимума сигнала на выходе согласованного фильтра с простым радиоимпульсом больше, чем длительность радиоимпульса зондирующего сигнала
основного максимума сигнала на выходе согласованного фильтра с простым радиоимпульсом больше, чем длительность радиоимпульса зондирующего сигнала .
.
Кроме того, частота принимаемого сигнала всегда кратна частоте зондирующего сигнала, что позволяет обнаруживать не все типы нелинейных рассеивателей. В частности, плохо обнаруживаются нелинейные рассеиватели с изрезанной частотной характеристикой.
Оценка направления на нелинейный рассеиватель у данного аналога, очень неточная. Дело в том, что в условиях переотражений зондирующего сигнала и сигнала-отклика сильно искажаются диаграммы направленности антенны зондирующего сигнала и приемной антенны.
Соответственно лазерный целеуказатель на основе амплитудного метода не может точно указывать на местоположение радиоуправляемого взрывного устройства на местности.
Известен по [Дмитриев Вадим Владимирович, Замятина Ирина Николаевна RU 2621319 С1, Способ и устройство измерения дальности в двухчастотном нелинейном радиолокаторе, опубл. 02.06.2017, Бюл. №16] Способ определения местоположения цели двухчастотным нелинейным радиолокатором, использующий линейно-частотно-модулированный зондирующий сигнал, заключающийся в том, что нелинейным радиолокатором выполняется измерение промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала, для чего в направлении нелинейного рассеивателя излучается очищенный от побочных нелинейных продуктов облучающий нелинейный рассеиватель сигнал в составе первого зондирующего сигнала излучаемого при помощи первой излучающей антенны в виде последовательности из М одинаковых радиоимпульсов с периодом Т и длительностью  при этом их частота заполнения изменяется по линейному закону в диапазоне
при этом их частота заполнения изменяется по линейному закону в диапазоне  с центральной частотой
с центральной частотой  и второго зондирующего сигнала излучаемого при помощи второй излучающей антенны в виде последовательности из М одинаковых простых радиоимпульсов с периодом Т и длительностью
и второго зондирующего сигнала излучаемого при помощи второй излучающей антенны в виде последовательности из М одинаковых простых радиоимпульсов с периодом Т и длительностью  и центральной частотой
и центральной частотой  одновременно приемником, настроенным на частоту одного из комбинационных продуктов облучающего нелинейный рассеиватель сигнала второго или третьего порядка, с помощью приемной антенны, принимается принимаемый сигнал, состоящий из смеси шума и последовательности из М одинаковых переизлучаемых нелинейным рассеивателем радиоимпульсов рассеянного сигнала с периодом Т, длительностью
одновременно приемником, настроенным на частоту одного из комбинационных продуктов облучающего нелинейный рассеиватель сигнала второго или третьего порядка, с помощью приемной антенны, принимается принимаемый сигнал, состоящий из смеси шума и последовательности из М одинаковых переизлучаемых нелинейным рассеивателем радиоимпульсов рассеянного сигнала с периодом Т, длительностью  при этом частота их заполнения меняется по линейному закону в диапазоне
при этом частота их заполнения меняется по линейному закону в диапазоне  с центральной частотой
с центральной частотой  принимаемый сигнал преобразуется в приемнике в М реализаций сигнала промежуточной частоты с одинаковой длительностью реализации Т, являющейся периодом для всех систем нелинейного радиолокатора, при этом каждая реализация сигнала промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность
принимаемый сигнал преобразуется в приемнике в М реализаций сигнала промежуточной частоты с одинаковой длительностью реализации Т, являющейся периодом для всех систем нелинейного радиолокатора, при этом каждая реализация сигнала промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность  и изменяющий свою частоту заполнения по линейному закону в диапазоне
и изменяющий свою частоту заполнения по линейному закону в диапазоне  при этом спектральная полоса тракта сигнала промежуточной частоты ограничивается спектром радиоимпульса преобразованного сигнала
при этом спектральная полоса тракта сигнала промежуточной частоты ограничивается спектром радиоимпульса преобразованного сигнала  а центральная частота всех реализаций сигнала промежуточной частоты равна
а центральная частота всех реализаций сигнала промежуточной частоты равна  все М реализаций сигнала промежуточной частоты в приемнике синхронно суммируются с периодом Т, при этом формируется результирующий сигнал с длительностью Т, состоящий из шума и суммированного радиоимпульса с длительностью т, частота заполнения которого меняется по линейному закону, в диапазоне
все М реализаций сигнала промежуточной частоты в приемнике синхронно суммируются с периодом Т, при этом формируется результирующий сигнал с длительностью Т, состоящий из шума и суммированного радиоимпульса с длительностью т, частота заполнения которого меняется по линейному закону, в диапазоне  результирующий сигнал пропускается через согласованный фильтр, согласованный с суммированным радиоимпульсом, при измерении величины промежутка времени от момента излучения передних фронтов первых радиоимпульсов перового и второго зондирующих сигналов до момента приема принимаемого сигнала момент приема принимаемого сигнала определяется по временному положению основного максимума в сигнале на выходе согласованного фильтра, дальность R до нелинейного рассеивателя оценивают, пользуясь результатом измерения промежутка времени Δt от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала, сканируя в пространстве диаграммой направленности антенны принимаемого сигнала, по значению максимума принимаемого сигнала определяют направление на нелинейный рассеиватель, что вместе с оценкой дальности позволяет оценить местоположение нелинейного рассеивателя.
результирующий сигнал пропускается через согласованный фильтр, согласованный с суммированным радиоимпульсом, при измерении величины промежутка времени от момента излучения передних фронтов первых радиоимпульсов перового и второго зондирующих сигналов до момента приема принимаемого сигнала момент приема принимаемого сигнала определяется по временному положению основного максимума в сигнале на выходе согласованного фильтра, дальность R до нелинейного рассеивателя оценивают, пользуясь результатом измерения промежутка времени Δt от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала, сканируя в пространстве диаграммой направленности антенны принимаемого сигнала, по значению максимума принимаемого сигнала определяют направление на нелинейный рассеиватель, что вместе с оценкой дальности позволяет оценить местоположение нелинейного рассеивателя.
Способ определения местоположения цели двухчастотным нелинейным радиолокатором, использующий линейно-частотно-модулированный зондирующий сигнал существенно лучше способа измерения местонахождения нелинейного рассеивателя при помощи двухчастотного нелинейного радиолокатора в части решения задачи измерения дальности до нелинейного рассеивателя. Длительность основного максимума сигнала на выходе согласованного фильтра  по которой оценивается точность определения дальности до нелинейного рассеивателя, существенно меньше длительности радиоимпульса зондирующего сигнала τ и может быть оценена как
по которой оценивается точность определения дальности до нелинейного рассеивателя, существенно меньше длительности радиоимпульса зондирующего сигнала τ и может быть оценена как  Проблема в том, что для поиска некоторых типов нелинейных рассеивателей, в частности мин с электронными компонентами используются достаточно низкочастотные зондирующие сигналы. Их частотный диапазон от 200 до 1000 МГц, а типичная полоса принимаемого сигнала 10%. Соответственно неопределенность в определении дальности до нелинейного рассеивателя составляет 3 м или хуже, что уже позволяет ограничить область расположения цели поиска, в частности мины с электронными компонентами, но не позволяет ее дистанционно локализировать. Для решения этой задачи, нужна точность лучше примерно в 10÷20 раз.
Проблема в том, что для поиска некоторых типов нелинейных рассеивателей, в частности мин с электронными компонентами используются достаточно низкочастотные зондирующие сигналы. Их частотный диапазон от 200 до 1000 МГц, а типичная полоса принимаемого сигнала 10%. Соответственно неопределенность в определении дальности до нелинейного рассеивателя составляет 3 м или хуже, что уже позволяет ограничить область расположения цели поиска, в частности мины с электронными компонентами, но не позволяет ее дистанционно локализировать. Для решения этой задачи, нужна точность лучше примерно в 10÷20 раз.
При поиске объектов с априори неизвестными частотными свойствами Способ определения местоположения цели двухчастотным нелинейным радиолокатором, использующий линейно-частотно-модулированный зондирующий сигнал, как и все комбинационные двухчастотные радиолокаторы, обладает определенными преимуществами перед нелинейными радиолокаторами, использующими в качестве рабочих принимаемых сигналов гармоники, так как при поиске нелинейных рассеивателей может быть обследовано большее пространство возможностей в частотной области.
Оценка направления на нелинейный рассеиватель у данного аналога, очень неточная и определяется половиной ширины диаграммы направленности приемной антенны.
Еще одна проблема в реализации метода-прототипа возникает из-за того, что при применении способа определения местоположения цели двухчастотным нелинейным радиолокатором, использующий линейно-частотно-модулированный зондирующий сигнал в направлении нелинейного рассеивателя излучается два зондирующих сигнала в виде двух последовательностей радиоимпульсов при помощи двух антенн, расположенных на расстоянии b. Соответственно при нахождении нелинейного рассеивателя перед антеннами двухчастотного нелинейного радиолокатора на линии перпендикулярной центру отрезка, соединяющего антенны, оба сигнала будут синхронно облучать цель. Но при нахождении нелинейного рассеивателя в стороне от указанной линии, расстояние от каждой из излучающих антенн двухчастотного нелинейного радиолокатора до цели будет различно. В результате, в этом случае передние и задние фронты облучающих нелинейный рассеиватель зондирующих сигналов не будут совпадать, то есть возникнет ошибка, из-за которой длительность переизлученного нелинейным рассеивателем сигнала уменьшится. Соответственно в методе-прототипе содержится ошибка рассогласования, максимальную величину которой можно оценить как 
На фиг.1 проиллюстрировано появление указанной ошибки, на фиг.1 в столбце 1 показано взаимодействие радиоимпульсов первого зондирующего сигнала (условная временная диаграмма 1) и второго зондирующего сигнала (условная временная диаграмма 2) при облучении нелинейного рассеивателя, находящегося на линии, проведенной перпендикулярно из центра отрезка, соединяющему антенны. У импульсов первого и второго зондирующих сигналов совпадают временные моменты начала и конца радиоимпульсов. Соответственно с ними совпадают начало и конец переизлучаемого нелинейным рассеивателем радиоимпульса на суммарной комбинационной частоте (условная временная диаграмма 3), у которого будет та же длительность  , что и у радиоимпульсов зондирующих сигналов.
, что и у радиоимпульсов зондирующих сигналов.
В столбце 2 показано взаимодействие радиоимпульсов первого зондирующего сигнала (условная временная диаграмма 1) и второго зондирующего сигнала (условная временная диаграмма 2) при облучении нелинейного рассеивателя, находящегося напротив антенны второго зондирующего сигнала. В этом случае передний фронт у первого зондирующего сигнала отстает от переднего фронта второго зондирующего сигнала, соответственно задний фронт первого зондирующего сигнала опережает задний фронт второго зондирующего сигнала. В результате уменьшается длительность радиоимпульса, переизлучаемого нелинейным рассеивателем на суммарной комбинационной частоте (условная временная диаграмма 3).
Кроме того, недостатком данного технического решения является то, что не учитывается, что в качестве принимаемого сигнала может использоваться нелинейный продукт 2-го порядка, для которого характерна абсолютная ошибка, связанная с фазовыми свойствами всех целей нелинейных радиолокаторов на частотах четных нелинейных продуктов, то есть ошибка, связанная с неизвестной полярностью нелинейного элемента.
Поясним механизм возникновения этой ошибки. Нелинейный радиолокатор излучает два зондирующих сигнала с частотами  В результате нелинейный рассеиватель облучает суммарный зондирующий сигнал, который можно представить как радиоимпульс с балансной модуляцией у которого несущая частота равна
В результате нелинейный рассеиватель облучает суммарный зондирующий сигнал, который можно представить как радиоимпульс с балансной модуляцией у которого несущая частота равна 

За генерацию четных нелинейных продуктов при искажении тока, протекающего через нелинейный элемент с нелинейной вольтамперной характеристикой, отвечают четные члены ряда Тейлора, в который эта вольтамперная характеристика разложена [см. Заездный, A.M., Кушнир В.Ф., Ферсман Б.А. Теория нелинейных электрических цепей: М.: Связь, 1968. - 400 с.]. Четные члены ряда Тейлора, в который вольтамперная характеристика данного нелинейного элемента разложена, связаны с конкретным направлением тока, соответственно, эти четные члены ряда Тейлора принимают отрицательные или положительные значения. В частности, для нелинейной вольтамперной характеристики диода мы указываем направление, в котором протекает ток, а для нелинейного контакта - нет. Для нелинейного рассеяния указанные свойства приводят к тому, что фаза сигнала, рассеянного на второй гармонике зондирующего сигнала, зависит от положения нелинейного рассеивателя, например диполя, нагруженного на полупроводниковый диод. В частности, фаза сигнала, рассеянного на второй гармонике зондирующего сигнала, изменится, если перевернуть диполь на 180 градусов в плоскости своей оси. Указанные фазовые свойства проверялись экспериментально, в частности при исследовании поляризационных свойств систем из двух ортогональных диполей, нагруженных на полупроводниковые диоды [Горбачев А.А., Ларцов С.В. Поляризационные свойства двухвибраторной модели нелинейного рассеивателя // Радиотехника и электроника. 1995. Т. 40. №12. С. 1761].
Указанный эффект будет существенным для процессов, протекающих в HP в начале взаимодействия зондирующего сигнала и нелинейного рассеивателя, условная схема которых представлена на фиг.2.
Здесь на условных осциллограммах 1 и 2 представлены радиоимпульсы первого и второго зондирующих сигналов, радиоимпульс суммарного зондирующего сигнала, облучающего и наводящегося в цепях нелинейного рассеивателя представлен на условной осциллограмме 3.
На условных осциллограммах 4 и 5 представлены результаты протекания токов суммарного зондирующего сигнала по цепям нелинейного рассеивателя. Вид тока зависит от полярности нелинейного элемента нелинейного рассеивателя. На условной осциллограмме 4 полярность нелинейного элемента такова, что протекающий ток имеет только отрицательные значения, на условной осциллограмме 5 - только положительные.
Для рассматриваемого эффекта существенно, что нелинейное рассеяние на нелинейном рассеивателе, соответствующего условной осциллограмме 4, начнется с передним фронтом радиоимпульса суммарного зондирующего сигнала, а для нелинейного рассеивателя, соответствующего условной осциллограмме 5 - с запаздыванием на половину периода.
На условных осциллограммах 6 и 7 представлены переизлучаемые радиоимпульсы принимаемого сигнала на комбинационной частоте зондирующих сигналов для обоих случаев полярности нелинейного элемента нелинейного рассеивателя. Из условных осциллограмм видно, что в зависимости от полярности нелинейного элемента связанного с пространственным положением нелинейного рассеивателя будет наблюдаться различное положение переднего фронта радиоимпульсов принимаемого сигнала, отличающиеся на один период.
Данная ошибка, связанная с неизвестной полярностью нелинейного элемента, в нелинейной радиолокации как правило считается несущественной, однако для низкочастотных нелинейных радиолокаторов зондирующий сигнал может быть в диапазоне 400÷1000 МГц и ошибка в определении дальности может составлять 0,75÷0,5 м, что уже существенно для задачи локализации местоположения мин.
Способ определения местоположения нелинейного рассеивателя при помощи нелинейного радиолокатора, использующего линейно-частотно-модулированные зондирующие сигналы, известный по [Бабанов Н.Ю., Дмитриев В.В., Замятина И.Н., Ларцов С.В. О возможностях улучшения характеристик разрешения по дальности нелинейными радиолокаторами, применяющими ЛЧМ // Проектирование и технология электронных средств, 2024, №1, с. 36-41; Решение Федеральной службы по интеллектуальной собственности о выдаче патента на изобретение от 23.09.2024 по Заявке №2024110764/07(024282) от 19.04.2024 Способ повышения точности определения дальности до нелинейного рассеивателя при помощи нелинейного радиолокатора, использующего линейно-частотно- модулированные зондирующие сигналы, авторы Бабанов Н.Ю., Дмитриев В.В., Замятина И.Н., Ларцов С.В.], заключающийся в том, что при помощи нелинейного радиолокатора, целью которого является нелинейный рассеиватель, оценивают дальность до цели R, для чего выполняется измерение Δt временного интервала распространения сигнала до цели и обратно, то есть промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала, который фиксируется по появлению основного максимума в сигнале на выходе согласованного фильтра, для этого в направлении цели излучается очищенный от побочных нелинейных продуктов облучающий сигнал, состоящий из последовательности из М одинаковых радиоимпульсов зондирующего сигнала с периодом Т и длительностью τ, при этом их частота заполнения изменяется по линейному закону в диапазоне  с центральной частотой
с центральной частотой  излучаемых при помощи излучающей антенны, одновременно приемником, настроенным на частоту одного из продуктов нелинейного преобразования облучающего сигнала, с помощью приемной антенны, принимается принимаемый сигнал, состоящий из смеси шума и последовательности из М одинаковых переизлучаемых целью радиоимпульсов рассеянного сигнала с периодом Т и длительностью τ, при этом частота их заполнения меняется по линейному закону в диапазоне
излучаемых при помощи излучающей антенны, одновременно приемником, настроенным на частоту одного из продуктов нелинейного преобразования облучающего сигнала, с помощью приемной антенны, принимается принимаемый сигнал, состоящий из смеси шума и последовательности из М одинаковых переизлучаемых целью радиоимпульсов рассеянного сигнала с периодом Т и длительностью τ, при этом частота их заполнения меняется по линейному закону в диапазоне  с центральной частотой
с центральной частотой  принимаемый сигнал преобразуется в приемнике в М реализаций сигнала промежуточной частоты с одинаковой длительностью реализации (Т-τ), являющейся периодом для всех систем приемника нелинейного радиолокатора, при этом каждая реализация сигнала промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность
принимаемый сигнал преобразуется в приемнике в М реализаций сигнала промежуточной частоты с одинаковой длительностью реализации (Т-τ), являющейся периодом для всех систем приемника нелинейного радиолокатора, при этом каждая реализация сигнала промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность  и изменяющий свою частоту заполнения по линейному закону в диапазоне
и изменяющий свою частоту заполнения по линейному закону в диапазоне  которым ограничена спектральная полоса тракта промежуточной частоты, а центральная частота для первой реализации сигнала промежуточной частоты равна
которым ограничена спектральная полоса тракта промежуточной частоты, а центральная частота для первой реализации сигнала промежуточной частоты равна  а для каждой следующей m-й реализации сигнала промежуточной частоты центральная частота реализации сигнала промежуточной частоты и границы спектральной полосы тракта промежуточной частоты постоянно увеличиваются или постоянно уменьшаются на величину
а для каждой следующей m-й реализации сигнала промежуточной частоты центральная частота реализации сигнала промежуточной частоты и границы спектральной полосы тракта промежуточной частоты постоянно увеличиваются или постоянно уменьшаются на величину  все М реализаций сигнала промежуточной частоты синхронно суммируются с периодом (Т-τ), при этом формируется результирующий сигнал с длительностью (Т-τ), состоящий из шума и суммированного радиоимпульса с длительностью
все М реализаций сигнала промежуточной частоты синхронно суммируются с периодом (Т-τ), при этом формируется результирующий сигнал с длительностью (Т-τ), состоящий из шума и суммированного радиоимпульса с длительностью  частота заполнения которого меняется по линейному закону, в диапазоне
частота заполнения которого меняется по линейному закону, в диапазоне  результирующий сигнал пропускается через согласованный фильтр, согласованный с суммированным радиоимпульсом, фиксируют сигнал на его выходе и измеряют временной интервал распространения сигнала до цели и обратно
результирующий сигнал пропускается через согласованный фильтр, согласованный с суммированным радиоимпульсом, фиксируют сигнал на его выходе и измеряют временной интервал распространения сигнала до цели и обратно  сканируя в пространстве диаграммой направленности приемной антенны, по значению максимума интенсивности принимаемого сигнала определяют направление на цель, что вместе с оценкой дальности до цели R дает оценку местоположения цели - нелинейного рассеивателя.
сканируя в пространстве диаграммой направленности приемной антенны, по значению максимума интенсивности принимаемого сигнала определяют направление на цель, что вместе с оценкой дальности до цели R дает оценку местоположения цели - нелинейного рассеивателя.
Способ - прототип решает самую важную проблему - повышения точности в определении дальности до цели, однако определение направления на нелинейный рассеиватель у прототипа, как и у предыдущих аналогов, очень неточная и определяется половиной ширины диаграммы направленности приемной антенны.
Кроме того, прототипом не учитываются, что антенны нелинейного радиолокатора находятся на некоторой базе - расстоянии друг от друга. Соответственно геометрическим местом точек возможного нахождения цели, соответствующему измененному времени Δt, является эллипс, в то время как в прототипе подразумевается, что это окружность, так как не определяется и не учитывается в расчетах величина расстояния между излучающей и приемной антеннами. Возникающая ошибка будет мала, если длина базы во много раз меньше дальности обнаружения. Однако в случае использования нелинейных радиолокаторов для поиска мин реальна ситуация, когда длина базы меньше дальности обнаружения около десяти раз и ошибка будет существенной.
Указанные недостатки, включая недостатки, отмеченные у аналогов, преодолены в предлагаемом техническом решении:
Способе определения координат нелинейного рассеивателя комбинационным радиолокатором, заключающийся в том, что при помощи нелинейного радиолокатора, целью которого является нелинейный рассеиватель, оценивают дальность до цели R, для чего выполняется первое измерение временного интервала распространения сигнала до цели и обратно  то есть промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала, который фиксируется по появлению основного максимума в сигнале на выходе согласованного фильтра, для этого в направлении цели излучается очищенный от побочных нелинейных продуктов облучающий сигнал, состоящий из последовательности из М одинаковых радиоимпульсов зондирующего сигнала с периодом Т и длительностью
то есть промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала, который фиксируется по появлению основного максимума в сигнале на выходе согласованного фильтра, для этого в направлении цели излучается очищенный от побочных нелинейных продуктов облучающий сигнал, состоящий из последовательности из М одинаковых радиоимпульсов зондирующего сигнала с периодом Т и длительностью  при этом их частота заполнения изменяется по линейному закону в диапазоне
при этом их частота заполнения изменяется по линейному закону в диапазоне  с центральной частотой
с центральной частотой  излучаемых при помощи излучающей антенны, одновременно приемником, настроенным на частоту одного из продуктов нелинейного преобразования облучающего сигнала, приемной антенной принимается принимаемый сигнал, состоящий из смеси шума и последовательности из М одинаковых переизлучаемых целью радиоимпульсов рассеянного сигнала с периодом Т и длительностью
излучаемых при помощи излучающей антенны, одновременно приемником, настроенным на частоту одного из продуктов нелинейного преобразования облучающего сигнала, приемной антенной принимается принимаемый сигнал, состоящий из смеси шума и последовательности из М одинаковых переизлучаемых целью радиоимпульсов рассеянного сигнала с периодом Т и длительностью  при этом частота их заполнения меняется по линейному закону в диапазоне
при этом частота их заполнения меняется по линейному закону в диапазоне  с центральной частотой
с центральной частотой  принимаемый сигнал преобразуется в приемнике в М реализаций сигнала промежуточной частоты с одинаковой длительностью реализации (Т-τ), являющейся периодом для всех систем приемника нелинейного радиолокатора, при этом каждая реализация сигнала промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность
принимаемый сигнал преобразуется в приемнике в М реализаций сигнала промежуточной частоты с одинаковой длительностью реализации (Т-τ), являющейся периодом для всех систем приемника нелинейного радиолокатора, при этом каждая реализация сигнала промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность  и изменяющий свою частоту заполнения по линейному закону в диапазоне
и изменяющий свою частоту заполнения по линейному закону в диапазоне  которым ограничена спектральная полоса тракта промежуточной частоты, а центральная частота первой реализации сигнала промежуточной частоты равна fПЧ, а для каждой следующей m-й реализации сигнала промежуточной частоты центральная частота реализации сигнала промежуточной частоты и границы спектральной полосы тракта промежуточной частоты постоянно увеличиваются или постоянно уменьшаются на величину
которым ограничена спектральная полоса тракта промежуточной частоты, а центральная частота первой реализации сигнала промежуточной частоты равна fПЧ, а для каждой следующей m-й реализации сигнала промежуточной частоты центральная частота реализации сигнала промежуточной частоты и границы спектральной полосы тракта промежуточной частоты постоянно увеличиваются или постоянно уменьшаются на величину  , все М реализаций сигнала промежуточной частоты синхронно суммируются с периодом (Т-τ), при этом формируется результирующий сигнал с длительностью (Т-τ), состоящий из шума и суммированного радиоимпульса с длительностью
, все М реализаций сигнала промежуточной частоты синхронно суммируются с периодом (Т-τ), при этом формируется результирующий сигнал с длительностью (Т-τ), состоящий из шума и суммированного радиоимпульса с длительностью  частота заполнения которого меняется по линейному закону, в диапазоне
частота заполнения которого меняется по линейному закону, в диапазоне  , результирующий сигнал пропускается через согласованный фильтр, согласованный с суммированным радиоимпульсом, фиксируют сигнал на его выходе и выполняют оценку
, результирующий сигнал пропускается через согласованный фильтр, согласованный с суммированным радиоимпульсом, фиксируют сигнал на его выходе и выполняют оценку  временного интервала распространения сигнала до цели и обратно, при этом предварительно определяется расстояние d от антенны зондирующего сигнала до приемной антенны, облучающий сигнал, дополняется последовательностью из М одинаковых простых радиоимпульсов вспомогательного сигнала с периодом Т и частотой заполнения
временного интервала распространения сигнала до цели и обратно, при этом предварительно определяется расстояние d от антенны зондирующего сигнала до приемной антенны, облучающий сигнал, дополняется последовательностью из М одинаковых простых радиоимпульсов вспомогательного сигнала с периодом Т и частотой заполнения  излучаемых при помощи дополнительной антенны, при этом радиоимпульсы вспомогательного сигнала начинают излучаться раньше и заканчивают излучаться позже, чем синхронные с ними радиоимпульсы зондирующего сигнала по крайней мере на величину
излучаемых при помощи дополнительной антенны, при этом радиоимпульсы вспомогательного сигнала начинают излучаться раньше и заканчивают излучаться позже, чем синхронные с ними радиоимпульсы зондирующего сигнала по крайней мере на величину  где С - скорость света, приемник, настраивается на частоту одного из комбинационных продуктов облучающего сигнала второго или третьего порядка, при этом если приемник, настроен на частоту комбинационного продукта нелинейного преобразования облучающего сигнала третьего порядка то выполненную оценку
где С - скорость света, приемник, настраивается на частоту одного из комбинационных продуктов облучающего сигнала второго или третьего порядка, при этом если приемник, настроен на частоту комбинационного продукта нелинейного преобразования облучающего сигнала третьего порядка то выполненную оценку  временного интервала распространения сигнала до цели и обратно принимается в качестве результата первого измерения временного интервала распространения сигнала до цели и обратно
временного интервала распространения сигнала до цели и обратно принимается в качестве результата первого измерения временного интервала распространения сигнала до цели и обратно  если приемник, настроен на частоту комбинационного продукта нелинейного преобразования облучающего сигнала второго порядка то осуществляется проверочная оценка
если приемник, настроен на частоту комбинационного продукта нелинейного преобразования облучающего сигнала второго порядка то осуществляется проверочная оценка  временного интервала распространения сигнала до цели и обратно, для которого инвертируют начальные фазы радиоимпульсов зондирующего сигнала и радиоимпульсов вспомогательного сигнала и повторно выполняют все действия по измерению временного интервала распространения сигнала до цели и обратно, полученные значения выполненной оценки
временного интервала распространения сигнала до цели и обратно, для которого инвертируют начальные фазы радиоимпульсов зондирующего сигнала и радиоимпульсов вспомогательного сигнала и повторно выполняют все действия по измерению временного интервала распространения сигнала до цели и обратно, полученные значения выполненной оценки  и проверочной оценки
и проверочной оценки  сравнивают и принимают меньшее значение в качестве результата первого измерения временного интервала распространения сигнала до цели и обратно
сравнивают и принимают меньшее значение в качестве результата первого измерения временного интервала распространения сигнала до цели и обратно  дальность до цели R оценивают в системе координат, связанной с расположением антенн нелинейного радиолокатора при помощи величины
дальность до цели R оценивают в системе координат, связанной с расположением антенн нелинейного радиолокатора при помощи величины  с учетом измеренного значения d, далее нелинейным радиолокатором выполняется второе измерение
с учетом измеренного значения d, далее нелинейным радиолокатором выполняется второе измерение  временного интервала распространения сигнала до цели и обратно, для этого предварительно определяют расстояние s от дополнительной антенны до приемной антенны и расстояние b от излучающей антенны до дополнительной антенны, меняют конфигурацию нелинейного радиолокатора так, что радиоимпульсы зондирующего сигнала излучаются при помощи дополнительной антенны, а радиоимпульсы вспомогательного сигнала излучаются излучающей антенной и выполняют все действия для измерения временного интервала распространения сигнала до цели и обратно
временного интервала распространения сигнала до цели и обратно, для этого предварительно определяют расстояние s от дополнительной антенны до приемной антенны и расстояние b от излучающей антенны до дополнительной антенны, меняют конфигурацию нелинейного радиолокатора так, что радиоимпульсы зондирующего сигнала излучаются при помощи дополнительной антенны, а радиоимпульсы вспомогательного сигнала излучаются излучающей антенной и выполняют все действия для измерения временного интервала распространения сигнала до цели и обратно  , вычисляют величину
, вычисляют величину  при помощи которой, используя величины d, s, b и оценку величины R, определяют координаты цели в системе координат, связанной с расположением антенн нелинейного радиолокатора.
при помощи которой, используя величины d, s, b и оценку величины R, определяют координаты цели в системе координат, связанной с расположением антенн нелинейного радиолокатора.
В предлагаемом Способе определения координат нелинейного рассеивателя комбинационным радиолокатором устранены все недостатки аналогов и прототипа.
- Осуществляется синхронное накопление и дальнейшая оптимальная или квазиоптимальная обработка сигнала с линейно-частотной модуляцией, при этом полоса может быть увеличена в число раз, равное числу накапливаемых импульсов. В результате всегда может быть достигнута удовлетворяющая практику точность определения дальности до цели.
- Оценка направления выполняется разностно-временным методом по измерению разности времен прохождения двух зондирующих сигналов от антенн, разнесенных на расстояние b, который во много раз точнее амплитудного метода по максимуму диаграммы направленности, так как не чувствителен к искажениям вида диаграммы направленности.
- Кратность частот принимаемого сигнала и зондирующего сигнала исключается за счет использования в качестве принимаемого сигнала одного из комбинационных продуктов облучающего нелинейный рассеиватель сигнала второго или третьего порядка. При этом существенно увеличиваются возможности по обследованию нелинейного рассеивателя в частотной области, так как для комбинационных частот имеется большее пространство возможностей.
- Ошибка, связанная с рассогласованием по времени сигналов, составляющих облучающий нелинейный рассеиватель сигнал устраняется за счет увеличения длительности радиоимпульсов вспомогательного сигнала, что позволяет реализовать метод синхронного накопления с увеличением полосы сигнала, для комбинационного нелинейного радиолокатора, так как также, как и в прототипе, принимаемый сигнал состоит из радиоимпульсов с линейной частотной модуляцией и известной длительностью - такой же, что и у радиоимпульсов зондирующего сигнала.
- Ошибка, связанная с фазовыми свойствами нелинейных продуктов второго порядка, устраняется при помощи дополнительного измерения с инверсией фаз сигналов в составе облучающего нелинейный рассеиватель сигнала. Пояснение метода устранения ошибки дается на фиг.3.
На фиг.3 кривые 1 и 2 соответствуют условным осциллограммам радиоимпульсов зондирующего сигнала и вспомогательного сигнала с частотами  Условная осциллограмма 3 соответствует суммарному радиоимпульсу указанных сигналов. Условная осциллограмма 7 соответствует току, протекающему через нелинейный элемент нелинейного рассеивателя. Условная осциллограмма 9 соответствует радиоимпульсу рассеянного нелинейным рассеивателем сигнала на частоте
Условная осциллограмма 3 соответствует суммарному радиоимпульсу указанных сигналов. Условная осциллограмма 7 соответствует току, протекающему через нелинейный элемент нелинейного рассеивателя. Условная осциллограмма 9 соответствует радиоимпульсу рассеянного нелинейным рассеивателем сигнала на частоте  Видно, что ток начинается со второго полупериода, а радиоимпульс рассеянного нелинейным рассеивателем сигнала "теряет" период.
Видно, что ток начинается со второго полупериода, а радиоимпульс рассеянного нелинейным рассеивателем сигнала "теряет" период.
Кривые 4 и 5 соответствуют условным осциллограммам инвертированных радиоимпульсов зондирующего сигнала и вспомогательного сигнала с частотами  Условная осциллограмма 6 соответствует суммарному радиоимпульсу указанных сигналов. Условная осциллограмма 8 соответствует току, протекающему через нелинейный элемент нелинейного рассеивателя. Условная осциллограмма 10 соответствует радиоимпульсу рассеянного нелинейным рассеивателем сигнала на частоте
Условная осциллограмма 6 соответствует суммарному радиоимпульсу указанных сигналов. Условная осциллограмма 8 соответствует току, протекающему через нелинейный элемент нелинейного рассеивателя. Условная осциллограмма 10 соответствует радиоимпульсу рассеянного нелинейным рассеивателем сигнала на частоте  Видно, что протекание тока через нелинейный элемент совпадает с началом радиоимпульсов зондирующего сигнала и вспомогательного сигнала, соответственно радиоимпульс рассеянного нелинейным рассеивателем сигнала тоже совпадает с началом облучающих нелинейный рассеиватель радиоимпульсов. То есть инвертирование облучающих нелинейный рассеиватель радиоимпульсов позволяет устранить ошибку.
Видно, что протекание тока через нелинейный элемент совпадает с началом радиоимпульсов зондирующего сигнала и вспомогательного сигнала, соответственно радиоимпульс рассеянного нелинейным рассеивателем сигнала тоже совпадает с началом облучающих нелинейный рассеиватель радиоимпульсов. То есть инвертирование облучающих нелинейный рассеиватель радиоимпульсов позволяет устранить ошибку.
Техническим результатом предлагаемого изобретения является высокая точность определения координат нелинейного рассеивателя временными методами.
Сущность предлагаемого изобретения заключается в том, что в приемнике расширяется полоса суммарного радиоимпульса до величины  , что позволяет улучшать точность определения дальности путем увеличения числа импульсов в последовательностях зондирующих сигналов без расширения их полосы. Для устранения зависимости длительности принимаемых радиоимпульсов от направления облучения используются радиоимпульсы последовательности вспомогательного сигнала с большей длительностью. Зависимость от неизвестной полярности включения нелинейных элементов в нелинейном рассеивателе устраняется проверочным измерением с инверсией фазы облучающих сигналов.
, что позволяет улучшать точность определения дальности путем увеличения числа импульсов в последовательностях зондирующих сигналов без расширения их полосы. Для устранения зависимости длительности принимаемых радиоимпульсов от направления облучения используются радиоимпульсы последовательности вспомогательного сигнала с большей длительностью. Зависимость от неизвестной полярности включения нелинейных элементов в нелинейном рассеивателе устраняется проверочным измерением с инверсией фазы облучающих сигналов.
Новым является то, что у излучаемых простых радиоимпульсов длительность больше, чем  и что выполняется два измерения с обменной местами антенн, излучающих зондирующие сигналы. Координата нахождения нелинейного рассеивателя в пространстве определяется как пересечение эллипса - геометрического места точек для суммарного времени сигнала, прошедшего путь излучающая антенна-цель-приемная антенна и параболы - геометрического места точек для разности двух времен прохождения сигналов от двух разных излучающих антенн до цели.
и что выполняется два измерения с обменной местами антенн, излучающих зондирующие сигналы. Координата нахождения нелинейного рассеивателя в пространстве определяется как пересечение эллипса - геометрического места точек для суммарного времени сигнала, прошедшего путь излучающая антенна-цель-приемная антенна и параболы - геометрического места точек для разности двух времен прохождения сигналов от двух разных излучающих антенн до цели.
Предлагаемый Способ определения координат нелинейного рассеивателя комбинационным радиолокатором может быть реализован в комбинационном нелинейном радиолокаторе, использующим линейно-частотно-модулированный зондирующий сигнал блок-схема которого представлена на фиг.4.
На фиг.4: 1 - Формирователь тактовых видеоимпульсов с периодом  2 - Формирователь тактовых видеоимпульсов с периодом
2 - Формирователь тактовых видеоимпульсов с периодом  3 - Формирователь последовательности из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью
3 - Формирователь последовательности из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью  4 - Формирователь последовательности из М видеоимпульсов зондирующего сигнала с периодом Т и длительностью
4 - Формирователь последовательности из М видеоимпульсов зондирующего сигнала с периодом Т и длительностью  5 - Формирователь тактовых видеоимпульсов с периодом
5 - Формирователь тактовых видеоимпульсов с периодом  6 - Формирователь последовательности линейно-частотно-модулированных радиоимпульсов зондирующего сигнала. 7 - Формирователь последовательности простых радиоимпульсов вспомогательного сигнала. 8 - Инвертор фазы зондирующего сигнала. 9 - Инвертор фазы вспомогательного сигнала. 10 - Усилитель зондирующего сигнала. 11 - Усилитель вспомогательного сигнала. 12 - Полосовой фильтр зондирующего сигнала. 13 - Полосовой фильтр вспомогательного сигнала. 14 - Антенный коммутатор. 15 - Излучающая антенна. 16 - Дополнительная антенна. 17 - Нелинейный рассеиватель. 18 - Приемная антенна. 19-Полосовой фильтр принимаемого сигнала. 20 -Усилитель принимаемого сигнала. 21 - Смеситель. 22 - Перестраиваемый гетеродин. 23 -Полосовой фильтр промежуточной частоты с перестройкой полосы. 24 - Усилитель промежуточной частоты с перестройкой полосы. 25 - Линия задержки на время
6 - Формирователь последовательности линейно-частотно-модулированных радиоимпульсов зондирующего сигнала. 7 - Формирователь последовательности простых радиоимпульсов вспомогательного сигнала. 8 - Инвертор фазы зондирующего сигнала. 9 - Инвертор фазы вспомогательного сигнала. 10 - Усилитель зондирующего сигнала. 11 - Усилитель вспомогательного сигнала. 12 - Полосовой фильтр зондирующего сигнала. 13 - Полосовой фильтр вспомогательного сигнала. 14 - Антенный коммутатор. 15 - Излучающая антенна. 16 - Дополнительная антенна. 17 - Нелинейный рассеиватель. 18 - Приемная антенна. 19-Полосовой фильтр принимаемого сигнала. 20 -Усилитель принимаемого сигнала. 21 - Смеситель. 22 - Перестраиваемый гетеродин. 23 -Полосовой фильтр промежуточной частоты с перестройкой полосы. 24 - Усилитель промежуточной частоты с перестройкой полосы. 25 - Линия задержки на время  26 - Сумматор. 27 - Оптимальный фильтр. 28 - Автоматизированное рабочее место оператора (индикатор).
26 - Сумматор. 27 - Оптимальный фильтр. 28 - Автоматизированное рабочее место оператора (индикатор).
Выход Формирователя 1 тактовых видеоимпульсов с периодом Δt соединен со входом Формирователя 2 тактовых видеоимпульсов с периодом τ и с первым входом Формирователя 3 последовательности из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью  Выход Формирователя 2 тактовых видеоимпульсов с периодом
Выход Формирователя 2 тактовых видеоимпульсов с периодом  соединен со вторым входом Формирователя 3 последовательности из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью
соединен со вторым входом Формирователя 3 последовательности из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью  входом Формирователя 4 последовательности из М видеоимпульсов зондирующего сигнала с периодом Т и длительностью
входом Формирователя 4 последовательности из М видеоимпульсов зондирующего сигнала с периодом Т и длительностью и входом Формирователя 5 тактовых видеоимпульсов с периодом
и входом Формирователя 5 тактовых видеоимпульсов с периодом  Выход Формирователя 3 последовательности из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью
Выход Формирователя 3 последовательности из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью  соединен со входом Формирователя 7 последовательности простых радиоимпульсов вспомогательного сигнала. Выход Формирователя 4 последовательности из М видеоимпульсов зондирующего сигнала с периодом Т и длительностью соединен со входом Формирователя 6 последовательности линейно-частотно-модулированных радиоимпульсов зондирующего сигнала. Выход Формирователя 6 последовательности линейно-частотно-модулированных радиоимпульсов зондирующего сигнала соединен со входом Инвертора 8 фазы зондирующего сигнала. Выход Формирователя 7 последовательности простых радиоимпульсов вспомогательного сигнала соединен со входом Инвертора 9 фазы вспомогательного сигнала. Выход Инвертора 8 фазы зондирующего сигнала соединен со входом Усилителя 10 зондирующего сигнала. Выход Инвертора 9 фазы вспомогательного сигнала соединен со входом Усилителя 11 вспомогательного сигнала. Выход Усилителя 10 зондирующего сигнала соединен со входом Полосового фильтра 12 зондирующего сигнала. Выход Усилителя 11 вспомогательного сигнала соединен со входом Полосового фильтра 13 вспомогательного сигнала.
соединен со входом Формирователя 7 последовательности простых радиоимпульсов вспомогательного сигнала. Выход Формирователя 4 последовательности из М видеоимпульсов зондирующего сигнала с периодом Т и длительностью соединен со входом Формирователя 6 последовательности линейно-частотно-модулированных радиоимпульсов зондирующего сигнала. Выход Формирователя 6 последовательности линейно-частотно-модулированных радиоимпульсов зондирующего сигнала соединен со входом Инвертора 8 фазы зондирующего сигнала. Выход Формирователя 7 последовательности простых радиоимпульсов вспомогательного сигнала соединен со входом Инвертора 9 фазы вспомогательного сигнала. Выход Инвертора 8 фазы зондирующего сигнала соединен со входом Усилителя 10 зондирующего сигнала. Выход Инвертора 9 фазы вспомогательного сигнала соединен со входом Усилителя 11 вспомогательного сигнала. Выход Усилителя 10 зондирующего сигнала соединен со входом Полосового фильтра 12 зондирующего сигнала. Выход Усилителя 11 вспомогательного сигнала соединен со входом Полосового фильтра 13 вспомогательного сигнала.
При первом измерении промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала выход Полосового фильтра 12 зондирующего сигнала соединен с первым входом Антенного коммутатора 14, а выход Полосового фильтра 13 вспомогательного сигнала соединен со вторым входом Антенного коммутатора 14, при этом первый выход Антенного коммутатора 14 соединен со входом Излучающей антенны 15, а второй выход Антенного коммутатора 14 соединен со входом Дополнительной антенны 16.
При втором измерении промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала выход Полосового фильтра 12 зондирующего сигнала соединен с третьем входом Антенного коммутатора 14, а выход Полосового фильтра 13 вспомогательного сигнала соединен с четвертым входом Антенного коммутатора 14, при этом третий выход Антенного коммутатора 14 соединен со входом Дополнительной антенны 16, а четвертый выход Антенного коммутатора 14 соединен со входом Излучающей антенны 15.
Конструкция Антенного коммутатора 14 предусматривает либо возможность соединения первого входа с первым выходом и второго входа со вторым выходом с отключением третьих и четвертых входов и выходов, либо соединения третьего входа с третьим выходом и четвертого входа с четвертым выходом с отключением первых и вторых входов и выходов. Диаграммы направленности Излучающей антенны 15 и Дополнительной антенны 16 направлены в область расположения Нелинейного рассеивателя 17. Выход Формирователя 5 тактовых видеоимпульсов с периодом  соединен со входом Перестраиваемого гетеродина 22, а также с первыми синхронизирующими входами Полосового фильтра 23 промежуточной частоты с перестройкой полосы, Усилителя 24 промежуточной частоты с перестройкой полосы, Линии задержки 25 на время (Т-τ), Сумматора 26, Оптимального фильтра 27, Автоматизированного рабочего места 28 оператора (индикатора). Диаграмма направленности Приемной антенны 18 направлена в область расположения Нелинейного рассеивателя 14. Выход Приемной антенны 18 соединен со входом Полосового фильтра 19 принимаемого сигнала. Выход Полосового фильтра 19 принимаемого сигнала соединен со входом Усилителя 20 принимаемого сигнала.
соединен со входом Перестраиваемого гетеродина 22, а также с первыми синхронизирующими входами Полосового фильтра 23 промежуточной частоты с перестройкой полосы, Усилителя 24 промежуточной частоты с перестройкой полосы, Линии задержки 25 на время (Т-τ), Сумматора 26, Оптимального фильтра 27, Автоматизированного рабочего места 28 оператора (индикатора). Диаграмма направленности Приемной антенны 18 направлена в область расположения Нелинейного рассеивателя 14. Выход Приемной антенны 18 соединен со входом Полосового фильтра 19 принимаемого сигнала. Выход Полосового фильтра 19 принимаемого сигнала соединен со входом Усилителя 20 принимаемого сигнала.
Выход Усилителя 20 принимаемого сигнала соединен с первым сигнальным входом Смесителя 21. Второй гетеродинный вход Смесителя 21 соединен с выходом Перестраиваемого гетеродина 22. Выход Смесителя 21 соединен с вторым сигнальным входом Полосового фильтра 23 промежуточной частоты с перестройкой полосы. Выход Полосового фильтра 23 промежуточной частоты с перестройкой полосы соединен с вторым сигнальным входом Усилителя 24 промежуточной частоты с перестройкой полосы. Выход Усилителя 24 промежуточной частоты с перестройкой полосы соединен со вторыми сигнальными входами Линии задержки 25 на время  и Сумматора 26. Выход Линии задержки 25 на время
и Сумматора 26. Выход Линии задержки 25 на время  соединен с третьим входом Сумматора 26. Выход Сумматора 26 соединен с вторым сигнальным входом Оптимального фильтра 27. Выход Оптимального фильтра 27 соединен с вторым сигнальным входом Автоматизированного рабочего места оператора 28 (индикатора).
соединен с третьим входом Сумматора 26. Выход Сумматора 26 соединен с вторым сигнальным входом Оптимального фильтра 27. Выход Оптимального фильтра 27 соединен с вторым сигнальным входом Автоматизированного рабочего места оператора 28 (индикатора).
Опишем функционирование комбинационного нелинейного радиолокатора, использующего линейно-частотно-модулированный зондирующий сигнал, приемник которого настроен на частоту комбинационного нелинейного продукта облучающего нелинейный рассеиватель сигнала второго порядка  при этом излучается последовательность радиоимпульсов зондирующего сигнала из М=3 линейно-частотно-модулированных радиоимпульсов. Отметим, что в данном случае
при этом излучается последовательность радиоимпульсов зондирующего сигнала из М=3 линейно-частотно-модулированных радиоимпульсов. Отметим, что в данном случае  так как у вспомогательного сигнала нет модуляции.
так как у вспомогательного сигнала нет модуляции.
1) Выполняется первое измерение промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала комбинационный нелинейный радиолокатор, использующий линейно-частотно-модулированный зондирующий сигнал, работает следующим образом.
2) Формирователь 1 тактовых видеоимпульсов с периодом  формирует последовательность тактовых коротких видеоимпульсов, период которых равен
формирует последовательность тактовых коротких видеоимпульсов, период которых равен  представленную на фиг.5, условная осциллограмма 1.
представленную на фиг.5, условная осциллограмма 1.
3) Эта последовательность тактовых коротких видеоимпульсов поступает на вход Формирователя 2 тактовых видеоимпульсов с периодом τ и одновременно на первый вход Формирователя 3 последовательности из М видеоимпульсов первого зондирующего сигнала с периодом Т и длительностью  .
.
4) Формирователь 2 тактовых видеоимпульсов с периодом  на основе последовательности тактовых коротких видеоимпульсов, период которых равен
на основе последовательности тактовых коротких видеоимпульсов, период которых равен  формирует на своем выходе последовательность тактовых коротких видеоимпульсов, период которых равен
формирует на своем выходе последовательность тактовых коротких видеоимпульсов, период которых равен  представленную на фиг.5, условная осциллограмма 2.
представленную на фиг.5, условная осциллограмма 2.
5) Эта последовательность тактовых коротких видеоимпульсов период которых равен  поступает на второй вход Формирователя 3 последовательности из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью
поступает на второй вход Формирователя 3 последовательности из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью  на вход Формирователя 4 последовательности из М видеоимпульсов зондирующего сигнала с периодом Т и длительностью
на вход Формирователя 4 последовательности из М видеоимпульсов зондирующего сигнала с периодом Т и длительностью  и на вход Формирователя 5 тактовых видеоимпульсов с периодом
и на вход Формирователя 5 тактовых видеоимпульсов с периодом 
6) Формирователь 3 последовательности из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью  на основе последовательности тактовых коротких видеоимпульсов, период которых равен
на основе последовательности тактовых коротких видеоимпульсов, период которых равен  на своем первом входе и последовательности тактовых коротких видеоимпульсов, период которых равен
на своем первом входе и последовательности тактовых коротких видеоимпульсов, период которых равен  на своем втором входе формирует на выходе последовательность из М=3 видеоимпульсов вспомогательного сигнала с периодом
на своем втором входе формирует на выходе последовательность из М=3 видеоимпульсов вспомогательного сигнала с периодом  и длительностью
и длительностью  представленную на фиг.5, условная осциллограмма 3, которая поступает на вход Формирователя 7 последовательности простых радиоимпульсов вспомогательного сигнала.
представленную на фиг.5, условная осциллограмма 3, которая поступает на вход Формирователя 7 последовательности простых радиоимпульсов вспомогательного сигнала.
7) Формирователь 4 последовательности из М видеоимпульсов зондирующего сигнала с периодом Т и длительностью  на основе последовательности тактовых коротких видеоимпульсов, период которых равен
на основе последовательности тактовых коротких видеоимпульсов, период которых равен  на своем выходе формирует последовательность из М=3 видеоимпульсов зондирующего сигнала с периодом
на своем выходе формирует последовательность из М=3 видеоимпульсов зондирующего сигнала с периодом  и длительностью
и длительностью  представленную на фиг.5, условная осциллограмма 4, которая поступает на вход Формирователя 6 последовательности линейно-частотно-модулированных радиоимпульсов зондирующего сигнала.
представленную на фиг.5, условная осциллограмма 4, которая поступает на вход Формирователя 6 последовательности линейно-частотно-модулированных радиоимпульсов зондирующего сигнала.
8) Формирователь 5 тактовых видеоимпульсов с периодом  на основе последовательности коротких видеоимпульсов, период которых равен
на основе последовательности коротких видеоимпульсов, период которых равен  на своем выходе формирует последовательность тактовых видеоимпульсов период которых равен
на своем выходе формирует последовательность тактовых видеоимпульсов период которых равен  представленную на фиг.5, условная осциллограмма 5. Для синхронизации работы приемника эта последовательность тактовых видеоимпульсов поступает на вход Перестраиваемого гетеродина 22 и первые синхронизирующие входы Полосового фильтра 23 промежуточной частоты с перестройкой полосы, Усилителя 24 промежуточной частоты с перестройкой полосы, Линии задержки 25 на время
представленную на фиг.5, условная осциллограмма 5. Для синхронизации работы приемника эта последовательность тактовых видеоимпульсов поступает на вход Перестраиваемого гетеродина 22 и первые синхронизирующие входы Полосового фильтра 23 промежуточной частоты с перестройкой полосы, Усилителя 24 промежуточной частоты с перестройкой полосы, Линии задержки 25 на время  Сумматора 26, Оптимального фильтра 27; Автоматизированного рабочего места 28 оператора (индикатора).
Сумматора 26, Оптимального фильтра 27; Автоматизированного рабочего места 28 оператора (индикатора).
9) Таким образом процессы формирования и излучения зондирующих сигналов синхронизируются с периодом, равным  а процессы обработки принимаемого сигнала синхронизируются с периодом, равным
а процессы обработки принимаемого сигнала синхронизируются с периодом, равным 
10) Формирователь 6 последовательности линейно-частотно-модулированных радиоимпульсов зондирующего сигнала на основе последовательности из М=3 видеоимпульсов зондирующего сигнала с периодом Т и длительностью на его входе, формирует на своем выходе последовательность из М=3 линейно-частотно-модулированных радиоимпульсов зондирующего сигнала, имеющих частотную полосу
на его входе, формирует на своем выходе последовательность из М=3 линейно-частотно-модулированных радиоимпульсов зондирующего сигнала, имеющих частотную полосу центральную частоту
центральную частоту период Т и длительность
период Т и длительность  представленную на фиг.5, условная осциллограмма 7, которая поступает на вход Инвертор фазы 8 зондирующего сигнала.
представленную на фиг.5, условная осциллограмма 7, которая поступает на вход Инвертор фазы 8 зондирующего сигнала.
11) Формирователь 7 последовательности простых радиоимпульсов вспомогательного сигнала, на основе последовательности из М=3 видеоимпульсов вспомогательного сигнала с периодом Т и длительностью  на его входе, формирует на своем выходе вспомогательный сигнала в виде последовательности из М=3 простых радиоимпульсов вспомогательного сигнала с частотой
на его входе, формирует на своем выходе вспомогательный сигнала в виде последовательности из М=3 простых радиоимпульсов вспомогательного сигнала с частотой  периодом Т и длительностью
периодом Т и длительностью  представленную на фиг.5, условная осциллограмма 6, который поступает на вход Инвертор фазы 9 вспомогательного сигнала.
представленную на фиг.5, условная осциллограмма 6, который поступает на вход Инвертор фазы 9 вспомогательного сигнала.
12) В режиме основного измерения Инвертор фазы 8 зондирующего сигнала и Инвертор фазы 9 вспомогательного сигнала передают сигналы со входа на выход без изменений.
13) Последовательность из М=3 линейно-частотно-модулированных радиоимпульсов зондирующего сигнала, имеющих частотную полосу  центральную частоту
центральную частоту  период Т и длительность
период Т и длительность  с выхода Инвертора фазы 8 зондирующего сигнала проходит через Усилитель 10 зондирующего сигнала, Полосовой фильтр 12 зондирующего сигнала и поступает на первый вход Антенного коммутатора 14.
с выхода Инвертора фазы 8 зондирующего сигнала проходит через Усилитель 10 зондирующего сигнала, Полосовой фильтр 12 зондирующего сигнала и поступает на первый вход Антенного коммутатора 14.
14) Последовательность из М=3 простых радиоимпульсов вспомогательного сигнала с частотой  периодом Т и длительностью
периодом Т и длительностью  с выхода Инвертора фазы 9 вспомогательного сигнала проходит через Усилитель 11 вспомогательного сигнала, Полосовой фильтр 13 вспомогательного сигнала и поступает на второй вход Антенного коммутатора 14.
с выхода Инвертора фазы 9 вспомогательного сигнала проходит через Усилитель 11 вспомогательного сигнала, Полосовой фильтр 13 вспомогательного сигнала и поступает на второй вход Антенного коммутатора 14.
15) При первом измерении промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала у Антенного коммутатора 14 первый вход соединен с первым выходом, а второй вход соединен со вторым выходом.
16) Последовательность из М=3 линейно-частотно-модулированных радиоимпульсов зондирующего сигнала, имеющих частотную полосу  центральную частоту
центральную частоту  период Т и длительность
период Т и длительность с первого выхода Антенного коммутатора 14 проступает на вход Излучающей антенны 15 и излучается в направлении нелинейного рассеивателя 17.
с первого выхода Антенного коммутатора 14 проступает на вход Излучающей антенны 15 и излучается в направлении нелинейного рассеивателя 17.
17) Последовательность из М=3 простых радиоимпульсов вспомогательного сигнала с частотой  периодом Т и длительностью
периодом Т и длительностью  со второго выхода Антенного коммутатора 14 проступает на вход Дополнительной антенны 16 и излучается в направлении нелинейного рассеивателя 17.
со второго выхода Антенного коммутатора 14 проступает на вход Дополнительной антенны 16 и излучается в направлении нелинейного рассеивателя 17.
18) В нелинейном рассеивателе 17 в результате проявления эффекта нелинейного рассеяния происходит нелинейное преобразование радиоимпульсов зондирующего сигнала и радиоимпульсов вспомогательного сигнала, в результате которого на средней частоте  в направлении Приемной антенны 18 переизлучаются радиоимпульсы рассеянного сигнала в виде последовательности из М=3 линейно-частотно-модулированных радиоимпульсов с частотой
в направлении Приемной антенны 18 переизлучаются радиоимпульсы рассеянного сигнала в виде последовательности из М=3 линейно-частотно-модулированных радиоимпульсов с частотой  в диапазоне изменения частоты заполнения
в диапазоне изменения частоты заполнения  периодом Т и длительностью
периодом Т и длительностью представленную на фиг.5, условная осциллограмма 8.
представленную на фиг.5, условная осциллограмма 8.
19) Радиоимпульсы рассеянного сигнала принимаются Приемной антенны 18.
20) Принимаемый сигнал проходит через Полосовой фильтр 19 принимаемого сигнала и поступают на вход Усилителя 20 принимаемого сигнала.
21) С выхода Усилителя 20 принимаемого сигнала принимаемый сигнал, состоявший из смеси шума и последовательности из М одинаковых переизлучаемых нелинейным рассеивателем радиоимпульсов рассеянного сигнала с периодом Т, средней частотой заполнения  и длительностью
и длительностью  частота заполнения которых изменяется по линейному закону в полосе
частота заполнения которых изменяется по линейному закону в полосе  представленную на фиг.5, условная осциллограмма 9, поступает на первый сигнальный вход Смесителя 21.
представленную на фиг.5, условная осциллограмма 9, поступает на первый сигнальный вход Смесителя 21.
22) Одновременно в Перестраиваемом гетеродине 22 на основе поступающих на его вход синхронизирующих видеоимпульсов с периодом (Т-τ) от Формирователя 5 тактовых видеоимпульсов с периодом (Т-τ) формируется перестраиваемый сигнал гетеродина в виде М=3 примыкающих друг к другу гетеродинных радиоимпульсов с длительностью (Т-τ) каждый. При этом начальная фаза каждого импульса равна нулю, частота первого гетеродинного радиоимпульса равна  , частота каждого следующего m-го гетеродинного радиоимпульса определяется как
, частота каждого следующего m-го гетеродинного радиоимпульса определяется как  Этот сигнал поступает на второй гетеродинный вход Смесителя 21.
Этот сигнал поступает на второй гетеродинный вход Смесителя 21.
23) На выходе Смесителя 21 формируется сигнал промежуточной частоты со спектральной полосой сигнала промежуточной частоты  состоящий из М=3 примыкающих друг к другу радиоимпульсов промежуточной частоты с длительностью
состоящий из М=3 примыкающих друг к другу радиоимпульсов промежуточной частоты с длительностью  при этом каждый из радиоимпульсов промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность
при этом каждый из радиоимпульсов промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность  и изменяющий свою частоту заполнения по линейному закону в диапазоне изменения частоты заполнения
и изменяющий свою частоту заполнения по линейному закону в диапазоне изменения частоты заполнения  При этом а центральная частота первого радиоимпульса промежуточной частоты равна
При этом а центральная частота первого радиоимпульса промежуточной частоты равна  , а центральная частота каждого следующего радиоимпульса промежуточной частоты уменьшается на величину
, а центральная частота каждого следующего радиоимпульса промежуточной частоты уменьшается на величину  Сигнал промежуточной частоты, условная осциллограмма которого представлена на фиг.5, кривая 10, с выхода Смесителя 21 последовательно проходит через Полосовой фильтр 23 промежуточной частоты с перестройкой полосы и Усилитель 24 промежуточной частоты с перестройкой полосы, где очищается от побочных нелинейных компонент, усиливается и поступает на вторые сигнальные входы Линии задержки 25 на время
Сигнал промежуточной частоты, условная осциллограмма которого представлена на фиг.5, кривая 10, с выхода Смесителя 21 последовательно проходит через Полосовой фильтр 23 промежуточной частоты с перестройкой полосы и Усилитель 24 промежуточной частоты с перестройкой полосы, где очищается от побочных нелинейных компонент, усиливается и поступает на вторые сигнальные входы Линии задержки 25 на время  и Сумматора 26.
и Сумматора 26.
24) В Линии задержки 25 на время  и Сумматоре 26 под действием синхронизирующей последовательности тактовых видеоимпульсов период которых равен
и Сумматоре 26 под действием синхронизирующей последовательности тактовых видеоимпульсов период которых равен  поступающей с Формирователя 5 тактовых видеоимпульсов с периодом
поступающей с Формирователя 5 тактовых видеоимпульсов с периодом  сигнал промежуточной частоты синхронно суммируются с периодом, равным
сигнал промежуточной частоты синхронно суммируются с периодом, равным  , и за М=3 периодов формируется результирующий сигнал с длительностью равной
, и за М=3 периодов формируется результирующий сигнал с длительностью равной состоящий из шума и суммированного радиоимпульса длительностью
состоящий из шума и суммированного радиоимпульса длительностью  , частота заполнения которого меняется по линейному закону. Условная осциллограмма результирующего сигнала представлена на фиг.5, кривая 11. С выхода Сумматора 26 результирующий сигнал поступает на вход Согласованного фильтр 27.
, частота заполнения которого меняется по линейному закону. Условная осциллограмма результирующего сигнала представлена на фиг.5, кривая 11. С выхода Сумматора 26 результирующий сигнал поступает на вход Согласованного фильтр 27.
25) Результирующий сигнал проходит через Согласованный фильтр 27, где происходит его квазиоптимальная обработка.
26) С выхода Согласованного фильтра 27 результат квазиоптимальной обработки результирующего сигнала поступает на вход Автоматизированное рабочее место 28 оператора, где индицируется на индикаторе. Условная осциллограмма сигнала на выходе Согласованного фильтра 27 представлена на фиг.5, кривая 12.
27) По положению основного максимума сигнала на выходе Согласованного фильтра 27 зафиксированного на индикаторе Автоматизированного рабочего места 28 оператора фиксируют величину  времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала.
времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала.
28) Выполняется проверочное изменение промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала, для которого Инвертор фазы 8 зондирующего сигнала и Инвертор фазы 9 вспомогательного сигнала устанавливают в режимы, при которых входные сигналы передаются на выход в противофазе.
29) Повторяют все предыдущие действия для новых режимов Инвертор фазы 8 зондирующего сигнала и Инвертор фазы 9 вспомогательного сигнала и по положению основного максимума сигнала на выходе Согласованного фильтра 27 зафиксированного на индикаторе Автоматизированного рабочего места 28 оператора фиксируют величину  промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала.
промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала.
30) Полученные значения промежутков времени  сравнивают и принимают наименьшее значение в качестве величины выполненного измерения промежутка времени
сравнивают и принимают наименьшее значение в качестве величины выполненного измерения промежутка времени  от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала.
от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала.
31) По предварительно измеренному расстоянию d от Излучающей антенны 15 до Приемной антенны 18 и величины выполненного измерения промежутка времени  в системе координат, связанной с расположением Излучающей антенны 15 до Приемной антенны 18 проводят эллипс как геометрическое место точек, характеризующее дальность до нелинейного рассеивателя R, в которых может находиться Нелинейный рассеиватель 17.
в системе координат, связанной с расположением Излучающей антенны 15 до Приемной антенны 18 проводят эллипс как геометрическое место точек, характеризующее дальность до нелинейного рассеивателя R, в которых может находиться Нелинейный рассеиватель 17.
32) Выполняют второе измерение промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала.
33) Для этого предварительно определяют расстояние s от дополнительной антенны до приемной антенны и расстояние b от излучающей антенны до дополнительной антенны.
34) Антенный коммутатор 14 переключают так, что к выходу Полосового фильтра 12 зондирующего сигнала подключается третий вход Антенного коммутатора 14, а к соединенному с ним третьему выходу Антенного коммутатора 14 подключается вход Дополнительной антенны 16, кроме того к выходу Полосового фильтра 13 вспомогательного сигнала подключается четвертый вход Антенного коммутатора 14, а к соединенному с ним четвертому выходу Антенного коммутатора 14 подключается вход Излучающей антенны 15.
35) Устанавливают режимы Инвертора фазы 8 зондирующего сигнала и Инвертора фазы 9, соответствующие наименьшему значению измеренных промежутков времени 
36) Повторяют все предыдущие действия для второго измерения промежутка времени  от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала с новой конфигурацией переключателей Антенного коммутатора 14.
от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала с новой конфигурацией переключателей Антенного коммутатора 14.
37) Вычисляют значение величины  , по знаку которой определяют в какую сторону имеется отклонение от нормали у направления на нелинейный рассеиватель.
, по знаку которой определяют в какую сторону имеется отклонение от нормали у направления на нелинейный рассеиватель.
38) По предварительно измеренным расстояниям s и b и вычисленной величине  в системе координат, связанной с расположением Излучающей антенны 15 и Дополнительной антенны 16 проводят гиперболу, как геометрическое место точек и в которых может находиться Нелинейный рассеиватель 17, характеризующее направление на нелинейный рассеиватель. 39) В системе координат, связанной с расположением антенн нелинейного радиолокатора, определяют координаты нахождения Нелинейного рассеивателя 17 по пересечению эллипса и гиперболы.
в системе координат, связанной с расположением Излучающей антенны 15 и Дополнительной антенны 16 проводят гиперболу, как геометрическое место точек и в которых может находиться Нелинейный рассеиватель 17, характеризующее направление на нелинейный рассеиватель. 39) В системе координат, связанной с расположением антенн нелинейного радиолокатора, определяют координаты нахождения Нелинейного рассеивателя 17 по пересечению эллипса и гиперболы.
Для реализации предлагаемого технического решения могут быть использованы блоки и приборы, выпускаемые в настоящее время промышленностью, а также описанные в прототипе [Способ повышения точности определения дальности до нелинейного рассеивателя при помощи нелинейного радиолокатора, использующего линейно-частотно-модулированные зондирующие сигналы, известный по Заявке №2024110764/07(024282) от 19.04.2024, Решение Федеральной службы по интеллектуальной собственности о выдаче патента на изобретение от 23.09.2024]. В частности, приемная часть в составе: Приемная антенна 18, Полосовой фильтр 19 принимаемого сигнала, Усилитель 20 принимаемого сигнала, Смеситель 21, Перестраиваемый гетеродин 22, Полосовой фильтр 23 промежуточной частоты с перестройкой полосы, Усилитель 24 промежуточной частоты с перестройкой полосы, Линия задержки 25 на время  Сумматор 26, Оптимальный фильтр 27, Автоматизированное рабочее место оператора 28 (индикатор) предлагаемого технического решения такая же, как в прототипе.
Сумматор 26, Оптимальный фильтр 27, Автоматизированное рабочее место оператора 28 (индикатор) предлагаемого технического решения такая же, как в прототипе.
Синхронизирующая часть в составе: Формирователь 1 тактовых видеоимпульсов с периодом  Формирователь 2 тактовых видеоимпульсов с периодом
Формирователь 2 тактовых видеоимпульсов с периодом  Формирователь 3 серий из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью
Формирователь 3 серий из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью  Формирователь 4 серий из М видеоимпульсов зондирующего сигнала с периодом Т и длительностью τ, Формирователь 5 тактовых видеоимпульсов с периодом
Формирователь 4 серий из М видеоимпульсов зондирующего сигнала с периодом Т и длительностью τ, Формирователь 5 тактовых видеоимпульсов с периодом  могут быть выполнены на основе стандартный логических микросхем по [И.В. Малышев, Н. В. Паршина Схемотехника импульсных электронных средств. Учебное пособие. Ростов-на-Дону - Таганрог Издательство Южного федерального университета 2017].
могут быть выполнены на основе стандартный логических микросхем по [И.В. Малышев, Н. В. Паршина Схемотехника импульсных электронных средств. Учебное пособие. Ростов-на-Дону - Таганрог Издательство Южного федерального университета 2017].
Формирователь 6 последовательности линейно-частотно-модулированных радиоимпульсов зондирующего сигнала, Излучающая антенна 15 предлагаемого технического решения такая же как в прототипе, либо аналогично аналогу [В.В. Дмитриев, И.Н. Замятина Патент RU 2621319 С1, Способ и устройство измерения дальности в двухчастотном нелинейном радиолокаторе // Опубл. 02.06.2017, Бюл. №16].
Формирователь 7 последовательности простых радиоимпульсов вспомогательного сигнала, Усилитель 11 вспомогательного сигнала, Полосовой фильтр 13 вспомогательного сигнала, Дополнительная антенна 16 предлагаемого технического могут быть выполнены аналогично аналогу [В.В. Дмитриев, И.Н. Замятина Патент RU 2621319 С1, Способ и устройство измерения дальности в двухчастотном нелинейном радиолокаторе // Опубликовано: 02.06.2017, Бюл. №16].
В то же время Полосовой 12 фильтр зондирующего сигнала, Полосовой фильтр 13 вспомогательного сигнала, Полосовой фильтр 19 принимаемого сигнала могут быть изготовлены по [В.П. Леонченко, А.Л. Фельдштейн, Л.А. Шепелянский Расчет полосковых фильтров на встречных стержнях. Справочник. Москва: Издательство «Связь», 1975].
В качестве Излучающей антенны 15, Антенны 13 второго зондирующего сигнала; Дополнительной антенны 16, Приемной антенны 18 могут использоваться стандартные измерительные антенны П6-33, либо могут быть изготовлены по [Кочержевский Г.Н. Антенн-фидерные устройства. - М.: Связь, 1972].
Кроме того, для канала вспомогательного сигнала может быть использовано стандартное промышленное оборудование: СВЧ генератор типа Г4-154 в качестве - Формирователя 7 последовательности простых радиоимпульсов вспомогательного сигнала, Усилителя 11 вспомогательного сигнала - мощные СВЧ-усилители типа MS0082540.
Инвертор фазы 8 зондирующего сигнала и Инвертор фазы 9 вспомогательного сигнала могут быть реализованы в виде высокочастотных операционных усилителей, как правило имеющих инвертирующий вход, в частности по [Г.Л. Штрапенин Операционные усилители: стремление к совершенству // Компоненты и технологии, №10, 2007, с. 46-50, Штрапенин Г. Л. Современные операционные усилители фирмы National Semiconductor // Компоненты и технологии. 2005. №7].
Антенный коммутатор 14 может быть изготовлен на основе применения СВЧ переключателей электромеханических коаксиальных типа ПСВЧ-2П2Н-1Ч-1-28 ФИМД.460831.001 ТУ.
Наиболее перспективным объектом поиска - то есть Нелинейным рассивателем 17 могут выступать мины с электронными взрывателями, описанные в [Г.Н. Щербаков Средства обнаружения управляемых взрывных устройств. Специальная техника, 2000, №5 с. 40-43].
В качестве Усилителя 20 принимаемого сигнала может быть применен стандартный малошумящий усилитель MAHW001040-03 фирмы МИКРАН.
Смеситель21 может быть изготовлен по [Сазонов Д.М., Гридин А.Н., Мишустин Б.А. Устройства СВЧ. - М.: Высшая школа, 1981 -295 с.].
В качестве Перестраиваемого гетеродина 22 может быть использован измерительный высокочастотный генератор АКИП-7SG382.
Значительную часть комбинационного нелинейного радиолокатора, использующего линейно-частотно-модулированный зондирующий сигнал на современном уровне техники целесообразно выполнить в виде цифрового блока на основе сигнального процессора по [А.И. Тяжев; В.Г. Иванова Цифровая обработка сигналов и сигнальные процессоры: учеб. пособие - Самара: ИУНЛ ПГУТИ, 2008. - 307 с. - URL: https://rucont.ru/efd/2787291] В состав цифрового блока целесообразно включить: синхронизирующую часть: в составе: Формирователь 1 тактовых видеоимпульсов с периодом  Формирователь 2 тактовых видеоимпульсов с периодом
Формирователь 2 тактовых видеоимпульсов с периодом  Формирователь 3 серий из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью
Формирователь 3 серий из М видеоимпульсов вспомогательного сигнала с периодом Т и длительностью  Формирователь 4 серий из М видеоимпульсов зондирующего сисгнала с периодом Т и длительностью
Формирователь 4 серий из М видеоимпульсов зондирующего сисгнала с периодом Т и длительностью  Формирователь 5 тактовых видеоимпульсов с периодом
Формирователь 5 тактовых видеоимпульсов с периодом  блок подготовки излучаемых сигналов в составе:
блок подготовки излучаемых сигналов в составе:
Формирователя 6 последовательности линейно-частотно-модулированных радиоимпульсов зондирующего сигнала, Формирователь 7 последовательности простых радиоимпульсов вспомогательного сигнала, Инвертора фазы 8зондирующего сигнала, Инвертора фазы 9 вспомогательного сигнала; блока обработки пронимаемого сигнала в составе: Перестраиваемого гетеродина 22, Полосового фильтра 23 промежуточной частоты с перестройкой полосы, Усилителя 24 промежуточной частоты с перестройкой полосы, Линии задержки 25 на время (Т-t), Сумматора 26, Оптимального фильтра 27.
В качестве Индикатора 18 может быть использован персональный компьютер с промышленным интерфейсом.
Таким образом, предлагаемое техническое решение может быть реализовано на современном уровне техники.
Пример определения координат нелинейного рассеивателя
Пусть комбинационный нелинейный радиолокатор размещен на подвижном носителе, на котором закреплены три антенны (см. фиг.6): в точке I закреплена Излучающая антенна, в точке О закреплена Приемная антенна, в точке D закреплена Дополнительная антенна. Антенны размещены на одной линии, расстояние между антеннами ℓ = 1 метр. Начало отсчета - точка О системы координат совпадает с Приемной антенной, ось ОХ направлена вдоль линии антенн, ось OY перпендикулярно линии антенн.
Пусть обнаружен нелинейный рассеиватель в точке S с реальными координатами х=3 м, у=4 м в системе координат, связанной с антенной системой. Соответственно радиус-вектор R1 от Излучающей антенны до нелинейного рассеивателя равен 5,6568 м, радиус-вектор R2 от нелинейного рассеивателя до Приемной антенны равен 5 м, радиус-вектор R3 от Дополнительной антенны до нелинейного рассеивателя равен 4,4721 м.
Нелинейный радиолокатор измерил при первом изменении промежуток времени , при этом сигнал прошел путь от точки I до точки S и далее до точки О и измерена дальность на этом пути:
, при этом сигнал прошел путь от точки I до точки S и далее до точки О и измерена дальность на этом пути:

Соответственно будем считать известным, что нелинейным радиолокатором измерен путь сигнала: Излучающая антенна - нелинейный рассеиватель - Приемная антенна, а расстояние между точками начала и конца пути сигнала равна 1 метр.
Таким образом, имеем исходные данные в результате первого изменения:

Геометрическое место точек, где может находиться нелинейный рассеиватель исходя из имеющихся исходных данных - эллипс, а его фокусами являются точки излучения и приема сигнала точки - I и О. Построим линию - геометрическое место точек, на которой может находиться нелинейный рассеиватель.
Канонический вид уравнения эллипса имеет вид:

Воспользуемся известными соотношениями для эллипса
 - уравнение кривой - эллипса, на которой находится точка местоположения нелинейного рассеивателя. Следует отметить, что для полученного уравнения начало системы координат сдвинуто в центр между точками I и О, то есть на 0,5 м к точке I (на фиг.6 обозначено штрихпунктирной линией), что должно быть учтено при определении местоположения нелинейного рассеивателя в системе координат XOY с точкой отсчета - точкой О, в которой находится приемная антенна.
- уравнение кривой - эллипса, на которой находится точка местоположения нелинейного рассеивателя. Следует отметить, что для полученного уравнения начало системы координат сдвинуто в центр между точками I и О, то есть на 0,5 м к точке I (на фиг.6 обозначено штрихпунктирной линией), что должно быть учтено при определении местоположения нелинейного рассеивателя в системе координат XOY с точкой отсчета - точкой О, в которой находится приемная антенна.
Нелинейный радиолокатор измеряет при втором изменении промежуток времени , при этом сигнал прошел путь от точки D до точки S и далее до точки О и измерена дальность на этом пути:
, при этом сигнал прошел путь от точки D до точки S и далее до точки О и измерена дальность на этом пути:

В принципе можно построить еще один эллипс для фокусов в точках О и D, однако определение местоположения по пересечению двух эллипсов даст неудовлетворительные результаты с точки зрения определения направления на нелинейный рассеиватель - с учетом ошибки эллипсы сливаются на значительном промежутке.
Поэтому информативным параметром для второго измерения является разность двух измерений При этом на первом этапе по знаку этой разницы определяется, в какую сторону от нормали располагается нелинейный рассеиватель.
При этом на первом этапе по знаку этой разницы определяется, в какую сторону от нормали располагается нелинейный рассеиватель.

Таким образом, основные исходные данным являются:

Геометрическое место точек, где может находиться нелинейный рассеиватель исходя из имеющихся исходных данных - гипербола, а ее фокусами являются точки I и О - точки нахождения Излучающей антенна и Дополнительной антенн, между которыми расстояние
Канонический вид уравнения и основные соотношения для гиперболы имеют вид: 
Выполним вычисления:
 - уравнение гиперболы, на которой находится нелинейный рассеиватель. Уравнение получено в системе координат с точкой отсчета - точкой О, в которой находится приемная антенна.
- уравнение гиперболы, на которой находится нелинейный рассеиватель. Уравнение получено в системе координат с точкой отсчета - точкой О, в которой находится приемная антенна.
Строим в пространстве системы координат XOY по найденным уравнениям участки гиперболы и эллипса (см. фиг.7). Их пересечение соответствует точке S, в которой находится нелинейный рассеиватель.
Из графика фиг.7 следует, что нелинейный рассеиватель находится в точке с координатами х=3 м, у=4 м в системе координат, связанной с антенной системой и началом отсчета в точке расположения приемной антенны, то есть путем измерений пари помощи нелинейного радиолокатора определено местоположение нелинейного рассеивателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ повышения точности определения дальности в узкополосных радиолокаторах | 2024 |
|
RU2833591C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОДНОКОНТУРНЫХ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2009 |
|
RU2413242C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2009 |
|
RU2408033C1 |
| Способ повышения точности определения дальности до нелинейного рассеивателя при помощи нелинейного радиолокатора, использующего линейно-частотно-модулированные зондирующие сигналы | 2024 |
|
RU2830970C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВУХКОНТУРНЫХ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2010 |
|
RU2455659C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШИРОКОПОЛОСНЫХ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2013 |
|
RU2532258C1 |
| ПАРАМЕТРИЧЕСКИЙ РАССЕИВАТЕЛЬ - МАРКЕР С НЕЛИНЕЙНЫМ ФОРМИРОВАНИЕМ СИНХРОСИГНАЛОВ | 2011 |
|
RU2507537C2 |
| СПОСОБ И УСТРОЙСТВО МАРКИРОВКИ ОБЪЕКТОВ ПРИ ПОМОЩИ ЭЛЕКТРОННОГО НОМЕРА-ПЛОМБЫ, ОСУЩЕСТВЛЯЮЩЕЙ ИНФОРМАЦИОННЫЙ ОБМЕН СО СЧИТЫВАЮЩИМ УСТРОЙСТВОМ С ИСПОЛЬЗОВАНИЕМ СЕКРЕТНОГО КОДИРОВАНИЯ НА ОСНОВЕ АСИММЕТРИЧНЫХ КЛЮЧЕЙ | 2009 |
|
RU2408896C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАРКЕРОВ - ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2010 |
|
RU2441253C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, МАРКИРОВАННЫХ ПАРАМЕТРИЧЕСКИМИ РАССЕИВАТЕЛЯМИ | 2011 |
|
RU2487366C2 |
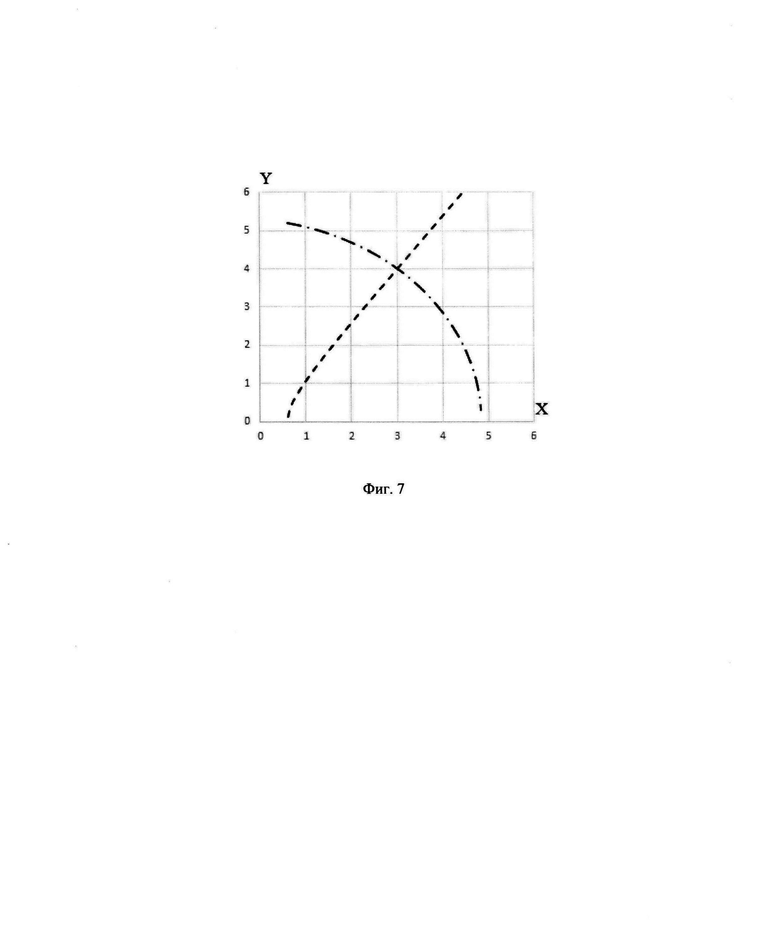
Изобретение относится к области нелинейной радиолокации, использующей сигнал, рассеянный нелинейным рассеивателем на частоте одной из гармоник или комбинационных нелинейных продуктов зондирующего сигнала, в качестве принимаемого полезного сигнала. Техническим результатом является высокая точность определения координат нелинейного рассеивателя временными методами. В заявленном способе для оценки координат нахождения нелинейного рассеивателя нелинейным радиолокатором излучаются две синхронные последовательности из М радиоимпульсов: из одинаковых простых радиоимпульсов и из одинаковых радиоимпульсов с длительностью τ и линейной частотной модуляцией в полосе ΔfЗС. Принимается, синхронно накапливается и оптимально обрабатывается рассеянный сигнал на комбинационной частоте в виде последовательности из М одинаковых радиоимпульсов с линейной частотной модуляцией в полосе ΔfPC и длительностью τ. При обработке полоса принимаемого сигнала расширяется до величины MΔfPC, что в М раз улучшает точность определения дальности. Для устранения зависимости длительности принимаемых радиоимпульсов от направления облучения простые радиоимпульсы излучаются с большей длительностью. Зависимость от неизвестной полярности включения нелинейных элементов в нелинейном рассеивателе устраняется измерением с инверсией фаз излучаемых сигналов. Новым является то, что у излучаемых простых радиоимпульсов длительность больше, чем τ, и что выполняются два измерения с обменом местами антенн, излучающих зондирующие сигналы. Координата нахождения нелинейного рассеивателя в пространстве определяется как пересечение эллипса - геометрического места точек для суммарного времени сигнала, прошедшего путь излучающая антенна - нелинейный рассеиватель - приемная антенна, и параболы - геометрического места точек для разности двух времен прохождения сигналов от двух разных излучающих антенн до нелинейного рассеивателя. 7 ил., 1 пр.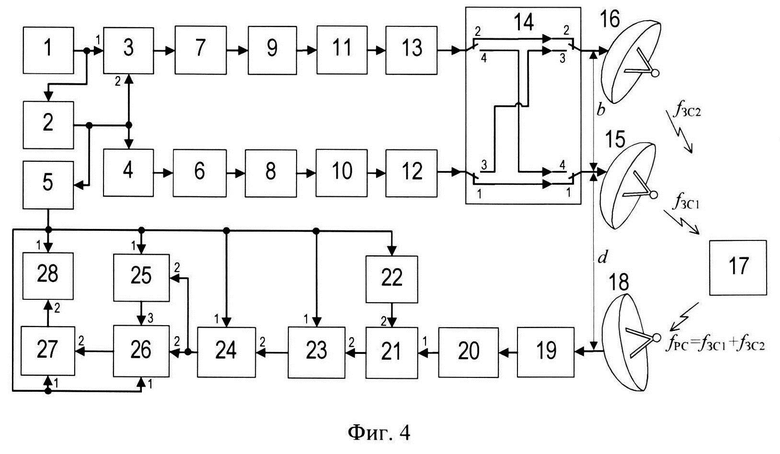
Способ определения координат нелинейного рассеивателя комбинационным радиолокатором, заключающийся в том, что при помощи нелинейного радиолокатора, целью которого является нелинейный рассеиватель, оценивают дальность до цели R, для чего выполняется первое измерение временного интервала распространения сигнала до цели и обратно ΔТ1, то есть промежутка времени от момента излучения переднего фронта первого радиоимпульса зондирующего сигнала до момента приема принимаемого сигнала, который фиксируется по появлению основного максимума в сигнале на выходе согласованного фильтра, для этого в направлении цели излучается очищенный от побочных нелинейных продуктов облучающий сигнал, состоящий из последовательности из М одинаковых радиоимпульсов зондирующего сигнала с периодом Т и длительностью τ, при этом их частота заполнения изменяется по линейному закону в диапазоне ΔfЗС с центральной частотой fЗС1, излучаемых при помощи излучающей антенны, одновременно приемником, настроенным на частоту одного из продуктов нелинейного преобразования облучающего сигнала, приемной антенной принимается принимаемый сигнал, состоящий из смеси шума и последовательности из М одинаковых переизлучаемых целью радиоимпульсов рассеянного сигнала с периодом Т и длительностью τ, при этом частота их заполнения меняется по линейному закону в диапазоне ΔfPC с центральной частотой fPC, принимаемый сигнал преобразуется в приемнике в М реализаций сигнала промежуточной частоты с одинаковой длительностью реализации (Т-τ), являющейся периодом для всех систем приемника нелинейного радиолокатора, при этом каждая реализация сигнала промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность τ и изменяющий свою частоту заполнения по линейному закону в диапазоне ΔfPC, которым ограничена спектральная полоса тракта промежуточной частоты, а центральная частота первой реализации сигнала промежуточной частоты равна fПЧ, а для каждой следующей m-й реализации сигнала промежуточной частоты центральная частота реализации сигнала промежуточной частоты и границы спектральной полосы тракта промежуточной частоты постоянно увеличиваются или постоянно уменьшаются на величину ΔfPC, все М реализаций сигнала промежуточной частоты синхронно суммируются с периодом (Т-τ), при этом формируется результирующий сигнал с длительностью (Т-τ), состоящий из шума и суммированного радиоимпульса с длительностью Мτ, частота заполнения которого меняется по линейному закону, в диапазоне MΔfPC, результирующий сигнал пропускается через согласованный фильтр, согласованный с суммированным радиоимпульсом, фиксируют сигнал на его выходе и выполняют оценку Δt1 временного интервала распространения сигнала до цели и обратно, отличающийся тем, что предварительно определяется расстояние d от антенны зондирующего сигнала до приемной антенны, облучающий сигнал дополняется последовательностью из М одинаковых простых радиоимпульсов вспомогательного сигнала с периодом Т и частотой заполнения fЗС2, излучаемых при помощи дополнительной антенны, при этом радиоимпульсы вспомогательного сигнала начинают излучаться раньше и заканчивают излучаться позже, чем синхронные с ними радиоимпульсы зондирующего сигнала по крайней мере на величину Δτ=d/C, где С - скорость света, приемник настраивается на частоту одного из комбинационных продуктов облучающего сигнала второго или третьего порядка, при этом если приемник настроен на частоту комбинационного продукта нелинейного преобразования облучающего сигнала третьего порядка, то выполненная оценка Δt1 временного интервала распространения сигнала до цели и обратно принимается в качестве результата первого измерения временного интервала распространения сигнала до цели и обратно ΔТ1, если приемник настроен на частоту комбинационного продукта нелинейного преобразования облучающего сигнала второго порядка, то осуществляется проверочная оценка Δt2 временного интервала распространения сигнала до цели и обратно, для которого инвертируют начальные фазы радиоимпульсов зондирующего сигнала и радиоимпульсов вспомогательного сигнала и повторно выполняют все действия по измерению временного интервала распространения сигнала до цели и обратно, полученные значения выполненной оценки Δt1 и проверочной оценки Δt2 сравнивают и принимают меньшее значение в качестве результата первого измерения временного интервала распространения сигнала до цели и обратно ΔТ1, дальность до цели R оценивают в системе координат, связанной с расположением антенн нелинейного радиолокатора при помощи величины ΔТ1 с учетом измеренного значения d, далее нелинейным радиолокатором выполняется второе измерение ΔТ2 временного интервала распространения сигнала до цели и обратно, для этого предварительно определяют расстояние s от дополнительной антенны до приемной антенны и расстояние b от излучающей антенны до дополнительной антенны, меняют конфигурацию нелинейного радиолокатора так, что радиоимпульсы зондирующего сигнала излучаются при помощи дополнительной антенны, а радиоимпульсы вспомогательного сигнала излучаются излучающей антенной, и выполняют все действия для измерения временного интервала распространения сигнала до цели и обратно  вычисляют величину (ΔТ1-ΔТ2), при помощи которой, используя величины d, s, b и оценку величины R, определяют координаты цели в системе координат, связанной с расположением антенн нелинейного радиолокатора.
вычисляют величину (ΔТ1-ΔТ2), при помощи которой, используя величины d, s, b и оценку величины R, определяют координаты цели в системе координат, связанной с расположением антенн нелинейного радиолокатора.
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ДВУХЧАСТОТНОМ НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2016 |
|
RU2621319C1 |
| НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР С ЦЕЛЕУКАЗАТЕЛЕМ | 2011 |
|
RU2474840C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕЛИНЕЙНЫХ ЭЛЕКТРОННЫХ УСТРОЙСТВ | 2022 |
|
RU2798477C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ПРОДУКТОПРОВОДОВ | 2007 |
|
RU2343499C1 |
| СПОСОБ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК НЕЛИНЕЙНОГО РАДИОЛОКАТОРА | 2016 |
|
RU2643199C1 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2008 |
|
RU2382380C1 |
| ИВАНОВ М.М., ЖЕЛЕЗНЯК В.К., ЧЕРТКОВ В.М | |||
| Способ повышения чувствительности нелинейного радиолокатора // Вестник Полоцкого государственного университета | |||
| Серия C | |||
| Фундаментальные науки | |||

