Область техники, к которой относится изобретение
Настоящее изобретение относится к способам и системам навигации транспортного средства, использующие определение местонахождения транспортного средства на основе GPS координат.
Уровень техники
Автомобильные навигационные системы, такие как бортовые системы и переносные GPS-системы, известны уже в течение многих лет. Изначально эти системы получили картографическую информацию со съемного носителя, например CD или DVD. Совсем недавно эти картографические системы стали оснащать внутренней памятью для хранения картографической информации.
Хотя некоторые системы хранят карты в локальной памяти, например на жестком диске или во флэш-памяти, другие системы могут осуществлять связь с удаленной сетью для получения картографической информации. Эта информация, например, может быть направлена по ряду направлений через беспроводное соединение. В таких вариантах осуществления изобретения, как этот, когда картографические данные не сохраняются (или сохраняются частично) на локальном жестком диске, поставщик может быть ограничен, к примеру, полосой пропускания, т.е. скоростью прохождения данных.
По меньшей мере, в одной существующей системе (система Ford SYNC) компьютерная система транспортного средства (которая может включать в себя навигационную систему или может быть подключена к навигационной системе транспортного средства, находящейся в транспортном средстве или за его пределами) может быть подключена к удаленной сети при помощи телефонного канала. Это подключение имеет ограниченную полосу пропускания и использует речевой диапазон беспроводного устройства, подключенного к компьютерной системе транспортного средства и удаленной сети.
Так как речевой диапазон имеет ограничения по доступной полосе пропускания, информация передается с очень низкой скоростью (по сравнению, например, с чистым информационным соединением). Обычно это не может повлиять на сценарий необходимости данных, так как пользователь может подождать. Но в некоторых случаях это может создавать проблему, например, при запросе направления движения в движущемся транспортном средстве. Если запрошенные инструкции по направлению движения не могут быть доставлены своевременно по имеющейся полосе пропускания, пользователь может пропустить первый и даже второй поворот на своем маршруте, до того как инструкции будут переданы на транспортное средство (из-за того, например, что большой файл передается при помощи подключения с небольшой полосой пропускания).
Раскрытие изобретения
В первом представленном варианте осуществления изобретения способ включает в себя определение маршрута до пункта назначения. Показанный способ также включает в себя определение типа соединения беспроводного устройства с сервером и назначение допуска в соответствии с типом соединения. Допуск используется для определения, отклонилось ли транспортное средство от маршрута. Допуск увеличивается или уменьшается обратно пропорционально скорости типа соединения. Другими словами, для высокоскоростного соединения допуск небольшой (что означает более четкий маршрут с большим количеством точек маршрута и большим объемом данных и с большей вероятностью определения отклонения от маршрута).
В соответствии с показанным способом назначенный допуск используется для определения точек, формирующих маршрут, таких как дороги, составляющие маршрут в пределах ограниченной области. Ограниченная область может быть определена допусками в сочетании с множеством линий, соединяющих последовательные точки вдоль маршрута.
В заключение, способ включает в себя передачу определенных точек в компьютерную систему транспортного средства, связанную с сервером.
Во втором показанном варианте осуществления изобретения способ включает в себя определение маршрута до пункта назначения, а также классификацию дорог для каждой дороги или участка каждой дороги, составляющей маршрут. В одном не ограничивающем примере классификация дорог основана на диапазоне скоростей.
Представленный способ также включает назначение допуска для каждой дороги или участка дороги на основании определенной классификации для этой дороги или участка дороги.
Способ также включает определение точек, формирующих маршрут, используя назначенные допуски так, чтобы дороги, составляющие маршрут, находились в пределах ограниченной области, определенной допусками в сочетании с множеством линий, соединяющих последовательные точки вдоль маршрута. В заключение, способ включает передачу определенных точек в компьютерную систему транспортного средства, связанную с сервером.
В третьем представленном варианте осуществления изобретения выполняемый сервером способ включает определение маршрута до пункта назначения и разделение маршрута на множество участков. Этот способ также включает в себя определение количества съездов для каждого участка и назначение допуска для каждого участка на основании определенного количества съездов.
Представленный способ также включает в себя определение точек, формирующих маршрут при помощи назначенных допусков, так что дороги, составляющие маршрут, находятся в пределах ограниченной области, определенной допусками в сочетании с множеством линий, соединяющих последовательные точки вдоль маршрута.
В заключение, способ включает передачу определенных точек в компьютерную систему транспортного средства, связанную с сервером.
Краткое описание чертежей
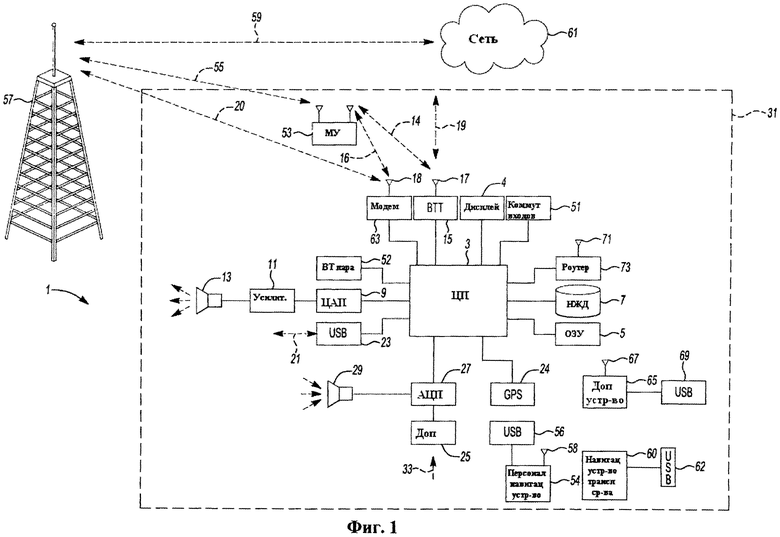
На Фиг.1 показана примерная модульная топология компьютерной системы транспортного средства;
на Фиг.2 показан пример маршрута движения;
на Фиг.3 показан пример навигационного расчета с низким порогом отклонения от маршрута с наложением на маршрут, показанный на Фиг.2;
на Фиг.4 показан пример навигационного расчета с динамически корректируемым порогом отклонения от маршрута с наложением на маршрут, показанный на Фиг.2;
на Фиг.5 показан пример процесса корректировки параметров на основании классификации дорог;
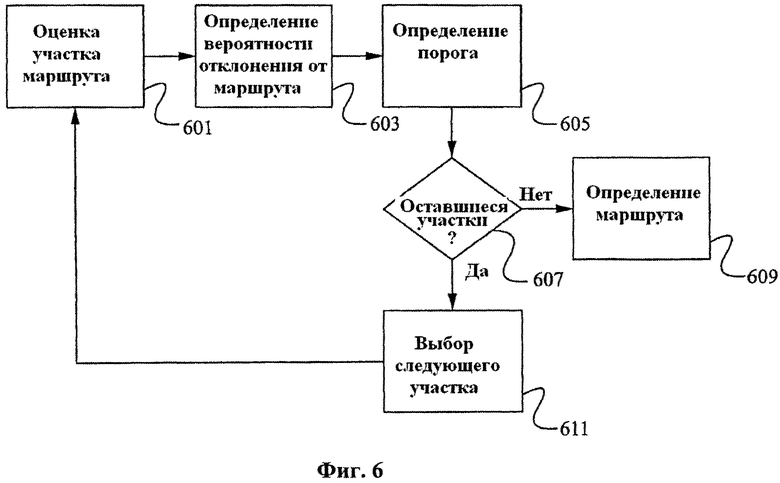
на Фиг.6 показан пример процесса динамической корректировки порога отклонения от маршрута на основании вероятности отклонения от маршрута;
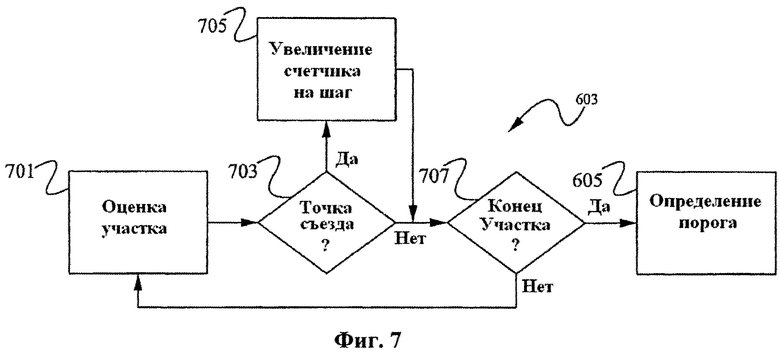
на Фиг.7 показан пример процесса определения вероятности отклонения от маршрута.
Осуществление изобретения
На Фиг.1 показан пример модульной топологии компьютерной системы 1 транспортного средства (VCS) для транспортного средства 31. Примером такой компьютерной системы 1 транспортного средства является система SYNC, произведенная THE FORD MOTOR COMPANY. Транспортное средство с установленной компьютерной системой транспортного средства может содержать графический внешний интерфейс 4, расположенный в транспортном средстве. Пользователь также может взаимодействовать с этим интерфейсом при его наличии, например, с помощью сенсорного экрана. В другом представленном варианте осуществления взаимодействие осуществляется с помощью нажатия кнопок, голосовой связи и конструктивного синтеза речи.
В варианте осуществления изобретения, представленном на Фиг.1, процессор 3 управляет, по меньшей мере, некоторыми этапами работы компьютерной системы 1 транспортного средства. Встроенный в транспортное средство процессор позволяет осуществлять обработку команд и стандартных программ непосредственно в самом транспортном средстве. Более того, процессор соединен с устройством 5 временного хранения и устройством 7 долгосрочного хранения. В представленном варианте осуществления устройством временного хранения является оперативное запоминающее устройство (ОЗУ), а устройством долгосрочного хранения - накопитель на жестком диске (НЖД) или флэш-память.
Процессор также оснащен рядом различных устройств ввода данных, позволяющих пользователю взаимодействовать с процессором. В представленном варианте осуществления изобретения предусмотрены микрофон 29, дополнительное устройство 25 ввода данных (на входе 33), USB устройство 23, устройство 24 GPS и BLUETOOTH устройство 15. Также представлен коммутатор 51 входов, который позволяет пользователю переключаться между различными устройствами ввода данных. Сигналы, поступающие на микрофон и дополнительный разъем, преобразуются из аналоговой формы в цифровую преобразователем 27 (АЦП) перед поступлением в процессор.
Устройства вывода данных системы могут включать, в частности, дисплей 4, динамик 13 или вывод для стереосистемы. Динамик соединен с усилителем 11 и получает сигнал от процессора 3 через цифроаналоговый преобразователь 9 (ЦАП). Вывод информации также может быть осуществлен на удаленное устройство BLUETOOTH, такое как персональное навигационное устройство 54, или USB устройство, такое как навигационное устройство 60 транспортного средства, через двусторонние потоки 19 и 21 данных соответственно.
В одном варианте осуществления изобретения система 1 использует приемопередатчик 15 BLUETOOTH для соединения 17 с мобильным устройством 53 пользователя (например, мобильным телефоном, смартфоном, КПК и т.д.). Мобильное устройство в дальнейшем может быть использовано для соединения 59 с сетью 61 за пределами транспортного средства 31, например с помощью канала связи 55 с вышкой 57 сотовой связи. В некоторых вариантах осуществления изобретения роль вышки 57 может выполнять точка доступа WiFi.
Пример соединения между мобильным устройством и приемопередатчиком BLUETOOTH представлен сигналом 14.
Команда установления соединения мобильного устройства 53 и приемопередатчика 15 BLUETOOTH может быть подана кнопкой 52 или с помощью аналогичного устройства ввода. В соответствии с этим на центральный процессор (ЦП) подается информация о том, что встроенный приемопередатчик BLUETOOTH будет соединен с приемопередатчиком BLUETOOTH на мобильном устройстве.
Обмен данными между ЦП 3 и сетью 61 может производиться с помощью, например, передачи информации на текущей частоте тарифного плана, на частотах выше частот передачи речи или с помощью двухтональных сигналов (DTMF), связанных с мобильным устройством 53. В альтернативном варианте осуществления изобретения может быть установлен встроенный модем 63 с антенной 18 для обмена 16 данными между ЦП 3 и сетью 61 на частотах, превышающих частоту передачи речи. В этом случае мобильное устройство 53 может быть использовано для соединения 59 с сетью 61 за пределами транспортного средства 31, например через соединение 55 с вышкой 57 сотовой связи. В некоторых вариантах осуществления изобретения модем 63 может устанавливать соединение 20 с вышкой 57 для соединения с сетью 61. В качестве не ограничивающего примера роль модема 63 может выполнять сотовый USB-модем, и соединение 20 может быть сотовым соединением.
В одном варианте осуществления изобретения процессор снабжен операционной системой, включающей прикладной программный интерфейс для связи с прикладным программным обеспечением модема. Прикладное программное обеспечение модема может получать доступ к встроенному модулю или прошивке приемопередатчика BLUETOOTH для осуществления беспроводного соединения с удаленным приемопередатчиком BLUETOOTH (таким как в мобильном устройстве).
В другом варианте осуществления изобретения мобильное устройство 53 содержит модем для обмена данными тональной частоты или широкополосного обмена данными. В варианте осуществления, где обмен данными происходит на частотах выше частот передачи речи, может использоваться техника, известная как частотное мультиплексирование, при которой пользователь мобильного устройства может использовать устройство для разговора прямо во время передачи данных. В других случаях, когда пользователь не использует устройство, для передачи данных может использоваться весь диапазон частот (например, от 300 Гц до 3,4 кГц).
Если у пользователя есть возможность передачи информации на текущей частоте тарифного плана для мобильного устройства, возможно, этот тарифный план обеспечивает передачу данных в диапазоне широких частот и система сможет использовать гораздо более широкий диапазон частот (увеличивая скорость передачи данных). В другом варианте осуществления изобретения мобильное устройство 53 заменено устройством сотовой связи (не показано), установленном на транспортном средстве 31. В еще одном варианте осуществления изобретения роль МУ 53 может выполнять устройство беспроводной локальной сети (LAN), выполненное с возможностью соединения, в частности, с сетью 802.11g (например, WiFi) или сетью WiMax.
В одном варианте осуществления изобретения входные данные могут быть переданы через мобильное устройство на частоте выше частоты передачи речи или на текущей частоте тарифного плана через встроенный приемопередатчик BLUETOOTH во внутренний процессор 3 транспортного средства. В случае если данные носят временный характер, данные могут храниться, например, на накопителе на жестком диске (НЖД) или другом носителе 7 до тех пор, пока они будут необходимы.
К дополнительным источникам, которые могут взаимодействовать с транспортным средством, относится персональное навигационное устройство 54, содержащее, например, USB-соединение 56 и/или антенну 58; или навигационное устройство 60 транспортного средства, содержащее USB-соединение 62 или другое соединение, встроенное устройство 24 GPS или удаленная система навигации (не показана), соединенная с сетью 61.
Более того, ЦП может устанавливать соединение с множеством дополнительных устройств 65. Эти устройства могут быть присоединены через беспроводное соединение 67 или проводное соединение 69. Также или в качестве альтернативного варианта осуществления ЦП может быть соединен с установленным в транспортном средстве беспроводным роутером 73, например, с помощью приемопередатчика 71 WiFi. Это позволяет ЦП устанавливать соединение с удаленными сетями в пределах досягаемости местного роутера 73. Дополнительное устройство 65 может представлять собой, в частности, персональные медиаплейеры, беспроводные медицинские устройства, портативные компьютеры и т.д.
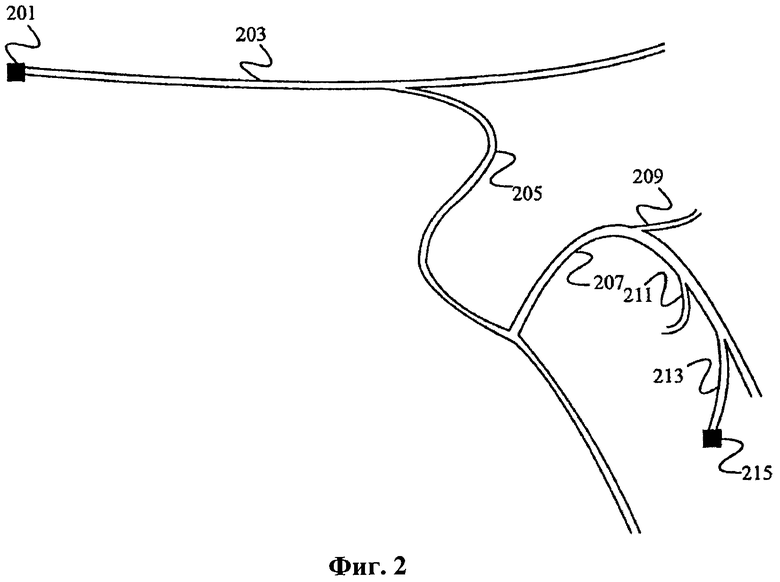
На Фиг.2 показан пример маршрута движения. В этом варианте осуществления изобретения пользователь сначала находится в текущем местоположении 201. Пользователь в этот момент может находиться в движении или нет, но это именно та точка, с которой происходит запрос направления движения до точки 215 назначения.
В данном варианте осуществления изобретения первая дорога 203, вдоль которой передвигается пользователь, относительно прямая. Несмотря на то что дорога изгибается на север во время его движения на восток, дорога большей частью прямая и не имеет отклонений от маршрута до поворота пользователя на дорогу 205.
На дороге 205 есть несколько поворотов, но нет перекрестков, пока пользователь не попадет на дорогу 207. Дорога 207 соединена с дорогой 213, которая ведет к пункту назначения. Дорога 207 имеет значительные изгибы, а также несколько отклонений 209 и 211 от маршрута, которые пользователь должен проехать для того, чтобы добраться до пункта назначения 215.
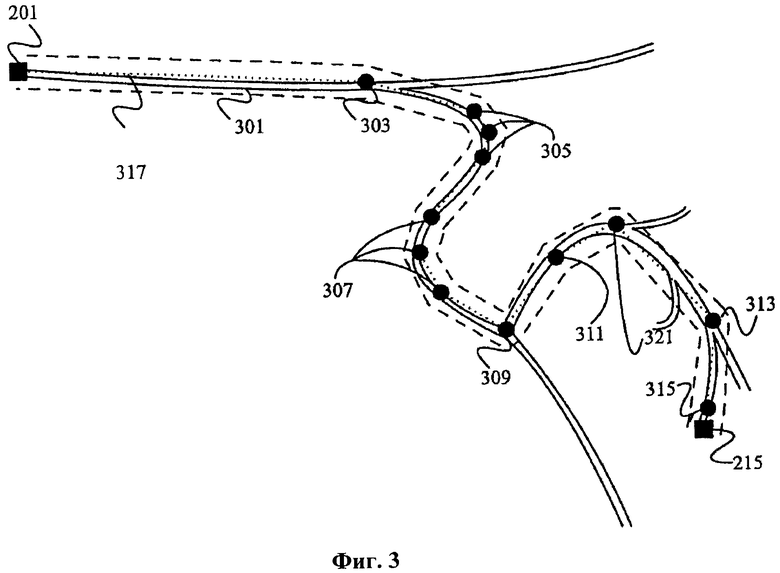
На Фиг.3 показан пример навигационных расчетов низкого порога отклонения от маршрута с наложением на маршрут, показанный на Фиг.2. В этом наглядном варианте осуществления изобретения навигационная система имеет низкий порог отклонения от маршрута 301. Порог отклонения от маршрута - это допуск, определяющий, движется ли все еще пользователь по назначенному маршруту. В частности, если допуск установлен на 20 футов, тогда до тех пор, пока GPS положение пользователя определяется как находящееся в пределах 20 футов от координат GPS, соответствующих определенной дороге, навигационная система определит, что пользователь не отклоняется от маршрута.
Если допуск отклонения от маршрута установлен очень высоким для определенной области, пользователь может достаточно сильно отклониться от маршрута, а система не определит, что он отклонился от маршрута. В частности, если допуск установлен на 200 футов в местности, где улицы находятся на расстоянии 100 футов друг от друга, пользователь может отклониться от маршрута на две улицы в то время, как система думает, что он все еще находится на маршруте.
В варианте осуществления изобретения, показанном на Фиг.3, допуск 301 ограничивает маршрут поездки (фактические дороги удалены для ясности демонстрации). Маршрут 317 - это маршрут, «известный» навигационной системе. В данном варианте осуществления изобретения пока фактическая дорога остается в пределах допуска маршрута 317, дополнительные «точки маршрута» (например, 303) необходимы до тех пор, пока меньшее количество точек маршрута выходят за пределы допуска. Другими словами, так как допуск содержит весь фактический маршрут, тогда, пока пользователь остается на фактическом маршруте, система не определит отклонения от маршрута. Если пользователь случайно повернул и оказался в точке 319, тогда регистрируется отклонение от маршрута.
Как показано на Фиг.3, на протяжении, по меньшей мере, первого отрезка пути до точки 319 отклонения от маршрута дорога все еще находится в пределах допуска, поэтому система может определить отклонение от маршрута в течение нескольких секунд. Если допуск сделать меньше, тогда большая часть дороги, ведущей к точке отклонения от маршрута 319, попадет за пределы допуска и система раньше определит отклонение от маршрута. Выбор оптимального соотношения, тем не менее, заключается в том, что может потребоваться больше точек маршрута для определения маршрута, например, на участках, таких как кривая между точками 309 и 311 и кривая между точками 321 и 313. С допусками на прежнем уровне, однако, весь маршрут остается в пределах допусков, и, таким образом, пока водитель остается на маршруте, система не регистрирует отклонение от маршрута.
В данном наглядном варианте осуществления изобретения используется 15 точек для представления маршрута. Каждая точка может быть, по меньшей мере, состоящей из двух частей парой чисел, каждое из которых имеет шесть десятичных знаков. Таким образом, при низком допуске для длинного маршрута или маршрута со множеством поворотов требуется определить значительное количество точек отсчета.
В данном варианте осуществления изобретения маршрут 317 представлен рядом прямых линий, соединяющих точки маршрута. Эти прямые линии не являются фактическими линиями, вдоль которых передвигается пользователь. Они служат для определения допусков, в пределах которых будет содержаться фактический маршрут.
В этом показанном варианте осуществления изобретения точки маршрута находятся, по меньшей мере, на каждом повороте. На маршруте между точками 201, 303 и первой из точек 305 существует возможность определить маршрут при помощи только точек 201 и первой из точек 305. Это, тем не менее, не включает поворот в точке 303, и пользователю остается только догадываться, в каком направлении двигаться дальше при раздвоении дороги. В каждой точке отсчета, однако, система предоставляет инструкцию при необходимости, и,таким образом, система может предоставить инструкцию повернуть в точке 303.
В некоторых случаях ряд точек может быть необходим для определения отрезка маршрута, хотя инструкции могут быть не предоставлены в этих точках. В частности, точки 305 и 307 определяют повороты в этих точках, хотя фактических инструкций пользователю не нужно (так как у пользователя нет иного выбора, как ехать по дороге). Необходимость множества точек, определяющих поворот, может быть устранена при помощи увеличения допуска, хотя это может вызвать иные проблемы, как указано выше (например, невозможность распознать отклонение от маршрута достаточно быстро). Аналогичным образом, точки 311, 315 будут не нужны, если увеличить допуски.
Точки 309, 313 и 321 включены, так как существуют разрывы дороги и/или в этих точках необходимы инструкции, куда поворачивать.
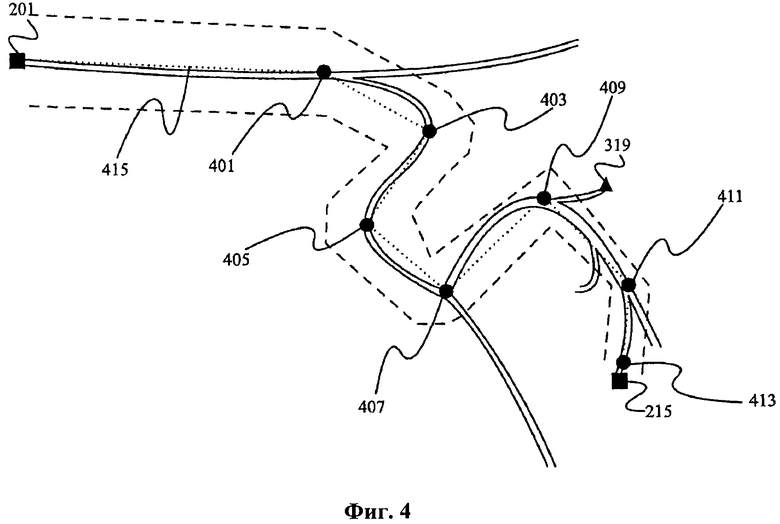
На Фиг.4 показан пример навигационного расчета с динамически корректируемым порогом отклонения от маршрута с наложением на маршрут, показанный на Фиг.2. В этом представленном варианте осуществления изобретения больший порог можно использовать для отрезков маршрута 415, на которых существует небольшая вероятность того, что пользователь отклонится от маршрута, или она отсутствует полностью. Например, между точками 401 и 407 есть только одна боковая дорога, где пользователь может отклониться от маршрута (после точки 401), соответственно, в этом варианте осуществления изобретения порог отклонения устанавливается на большую величину (например, 100 футов). Так как пользователь должен физически съехать с дороги на бездорожье для того, чтобы покинуть маршрут практически в любой точке, для определения маршрута можно использовать меньшее количество точек. Используются точки, представленные на фактических поворотах 401, 407, а также две точки 403, 405 для определения изогнутого отрезка дороги. Если применяется достаточно высокое пороговое значение, точки 403 и 405 будут не нужны.
В данном варианте осуществления изобретения становится доступно больше вариантов для отклонения от курса, поэтому порог динамически снижается. Например, между точками 407 и 413 порог снижается практически до исходного порога, показанного на Фиг.3. В этом варианте осуществления изобретения это происходит вследствие того, что существует несколько съездов, где пользователь может отклониться от маршрута, поэтому необходимо быстрее определить условие отклонения от маршрута (например, при помощи более низкого порога). Например, если используется более высокий порог, система может даже не определить отклонение от маршрута в точке 319.
Даже с более низким порогом на этом отрезке шоссе система может составить маршрут только при помощи точек поворота 409 и 411.
Необходимо выбрать баланс между максимальным порогом (для сокращения необходимых точек маршрута, таким образом, сокращая объем данных всего маршрута) и минимальным временем для определения отклонения от маршрута. Этого можно достичь, в частности, при помощи динамической корректировки порога на основании ряда вариантов отклонения от маршрута или динамической корректировки порога на основании типа классификации дорог.
В одной системе классификации дорогам присваивается рейтинг на основании предельной скорости, допустимой на данной дороге. Классификация может в большинстве случаев определить классы дорог (частности, дороги класса III имеют ограничение по скорости 40-50 миль в час). Хотя они и не являются идеальными вариантами, дороги со скоростью более 60 миль в час в большинстве случаев являются шоссе (и, таким образом, они имеют меньше вариантов отклонения от маршрута чем, например, городская улица). Соответственно, в одном варианте осуществления изобретения система будет использовать более высокий порог, когда водитель проезжает по дороге класса шоссе, и более низкий порог, когда водитель проезжает по городской улице.
Городские улицы также разделены между классами таким образом, что дороги с меньшим расстоянием между ними или большим количеством съездов имеют более низкие пороги, чем дороги, находящиеся на большем расстоянии друг от друга и с меньшим количеством съездов.
В следующем варианте осуществления изобретения могут быть использованы один или два общих порога. Например, порог в 100 футов может использоваться для поездки по шоссе, а порог в 20 футов - для поездки по городской улице.
Конкретные способы корректировки порогов могут быть использованы при необходимости балансировки скорости расчета по сравнению с размером загрузки по сравнению с отсрочкой в расчетах отклонения от маршрута. Например, использование простого двухпорогового способа даст более быстрые результаты и сохранит относительно небольшой общий маршрут во многих случаях, так как высокий порог на шоссе приведет к маршруту с несколькими точками отсчета, соединяющими большие расстояния. Эта система, однако, более восприимчива к более медленному определению отклонения от маршрута, и существует большая вероятность того, что пользователь проедет с отклонением от маршрута дальше, пока он не будет уведомлен об ошибке, чем с использованием другой системы.
Использование большего количества определенных порогов с, по меньшей мере, одним порогом ниже 20 футов (в качестве примера) может снизить вероятность отсрочки при определении отклонения от маршрута, но может увеличить общее количество точек маршрута, необходимых для определения маршрута. Это увеличит общий объем загрузки. Время на обработку также увеличивается, так как расчет большего количества точек занимает больше времени.
В третьем примере размер порога может быть динамически определен на основании количества вариантов отклонения от маршрута для приближающегося отрезка маршрута. В этом варианте осуществления изобретения время на обработку будет увеличено, так как системе необходимо «проверить» отрезок маршрута на варианты отклонения от маршрута (в частности, подсчитать количество поворотов). Количество точек будет больше, чем в фиксированной двухпороговой системе, и пакет данных, в результате, будет больше. Уведомление об отклонении от маршрута, вероятно, будет ближе к оптимальной ситуации, так как порог снижен при наличии большего количества возможностей отклонения от маршрута.
На Фиг.5 показан наглядный пример процесса корректировки порога на основании классификации дорог. В этом варианте осуществления изобретения процесс определения маршрута оценивает участок маршрута движения (этап 501). Хотя маршрут может быть разделен различными способами, в данном варианте осуществления изобретения участок определяется для каждой отдельной дороги. Другими словами, если маршрут требует, чтобы водитель съехал с одной дороги на другую, в систему поступает новый участок. Порог, соответствующий классификации участка, устанавливается на этапе 503, затем процесс проверяет, есть ли еще участки на маршруте (этап 505). Если нет нового участка, процесс продолжает рассчитывать маршрут (этап 507). Если участок присутствует, процесс переходит на следующий участок (этап 509) и повторяет определение порога.
Любой процесс оценки, включая, в частности, процесс, показанный на Фиг.5, 6 и 7, может быть выполнен для участка более длинного маршрута. В дальнейшем процесс можно повторить при достижении следующего участка маршрута.
Например, на маршруте из Детройта в Лос-Анджелес процесс определения маршрута будет сначала выполнен для участка дороги из Детройта в Чикаго (или меньшего, или большего участка маршрута). Так как водителю не нужна информация об участке маршрута после Чикаго в течение, как минимум, нескольких часов (количество времени на переезд из Детройта в Чикаго), можно использовать очень высокий порог для приближенного расчета маршрута из Чикаго в Лос-Анджелес.В альтернативном варианте осуществления изобретения может быть изучен весь маршрут и загружен в начале с использованием стандартного уровня порога.
По мере приближения водителя к Чикаго (или в любой точке после того, как первоначальные инструкции были предоставлены водителю на дороге), система может оценить второй участок маршрута. Таким образом, маршрут можно оценить быстрее и получить более точные инструкции при необходимости. Это еще один пример предоставления маршрута с эффективным использованием полосы пропускания с высокой степенью точности в отношении отчетности об отклонении от маршрута, которая предоставляется быстро через подключения с небольшой скоростью.
Если система предоставляет инструкции устно в отличие от отображения всего маршрута (или будущего отрезка маршрута), тогда направления могут быть рассчитаны за заданное время до того, как они будут необходимы, таким образом, чтобы использовать большую степень точности в отношении порога при точной и быстрой передаче.
На Фиг.6 показан наглядный пример процесса динамической корректировки порога отклонения от маршрута на основании вероятности возникновения отклонения от маршрута. В этом наглядном варианте осуществления изобретения система снова оценивает участок маршрута. Существует возможность разделить маршрут на участки на основании того, когда сделан поворот, как в примере, представленном на Фиг.5. В данном варианте осуществления изобретения, однако, дорога разделена на участки предопределенной длины. Если участок короче этой предопределенной длины, он рассматривается как отдельный участок.
Хотя это не обязательно, при помощи деления участка на предопределенные расстояния можно получить оптимальное соотношение между эффективностью и определением отклонения от маршрута. Например, если участок длиною 20 миль имеет пять съездов в течение первых пяти миль и ноль съездов в течение следующих пятнадцати миль, рассмотрение всей дороги как одного участка приведет к низкому порогу (из-за количества съездов в начале). Разделение дороги на четыре участка по пять миль (в качестве не ограничивающего примера) может привести к первой оценке при помощи низкого порога, но последующая оценка будет происходить при помощи более высокого порога и, соответственно, потребуется меньше точек координат. Также принимается во внимание, что дорога будет разделена на основании поворотов (таким образом, что весь показанный участок длиною 20 миль будет расцениваться как один участок).
После выбора участка для оценки (этап 601) система определяет вероятность отклонения от маршрута (этап 603). Оценка может быть основана, например, на количестве съездов, классе дороги и т.д. Один из примеров такого определения показан на Фиг.7.
На основании вероятности отклонения от маршрута устанавливается порог участка маршрута (этап 605). Система затем определяет, остались ли еще участки маршрута (этап 607). Если участков не осталось, система продолжает определять маршрут (этап 609). В противном случае система выберет следующий участок (этап 611) и продолжает определение порога.
На Фиг.7 показан пример процесса определения вероятности отклонения от маршрута (этап 603). В этом наглядном варианте осуществления изобретения определение основано на ряде возможностей возникновения отклонений от маршрута.
В данном варианте осуществления изобретения происходит оценка участка (этап 701) до того, пока не будет достигнута точка съезда (этап 703) или участок не закончится (этап 707). При достижении точки съезда счетчик увеличивается на шаг (этап 705). Если участок не закончился (этап 707), процесс продолжается.
Если участок закончился, процесс переходит на определение порога (этап 605).
Обработка навигационного маршрута и порога, описанная выше, может быть выполнена ЦП 3 в транспортном средстве 31 (Фиг.1). В качестве варианта осуществления изобретения, обработка может быть проведена на одном или более компьютерном сервере, связанном с сетью 61. Как объяснено выше, данные могут быть переданы между ЦП 3 в транспортном средстве 3 и сервером через беспроводной канал связи 14/55 (при помощи мобильного устройства 53) или соединения 20 (при помощи модема 63).
Варианты осуществления изобретения, представленные и описанные выше, не описывают и не демонстрируют все возможные варианты осуществления изобретения. Напротив, термины, использованные в настоящем описании, имеют скорее описательный, а не ограничивающий характер, и необходимо понимать, что возможны различные изменения, которые могут быть осуществлены без изменения сущности и выхода за рамки объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭФФЕКТИВНАЯ ЗАГРУЗКА НАВИГАЦИОННЫХ ДАННЫХ | 2011 |
|
RU2574426C2 |
| ДОСТАВКА, ОБРАБОТКА И ОБНОВЛЕНИЕ НОВОЙ КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 2011 |
|
RU2563104C2 |
| СПОСОБ МУЛЬТИМОДАЛЬНОЙ НАВИГАЦИИ | 2011 |
|
RU2571450C2 |
| ДОСТАВКА, ОБРАБОТКА И ОБНОВЛЕНИЕ НОВОЙ КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 2011 |
|
RU2577548C2 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2579366C2 |
| СПОСОБ СОЗДАНИЯ КАРТОГРАФИЧЕСКИХ ДАННЫХ | 2008 |
|
RU2498220C2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ ПРЕДОСТАВЛЕНИЯ ДОСТУПНОСТИ ПАРКОВОЧНЫХ МЕСТ | 2009 |
|
RU2519568C2 |
| ОПРЕДЕЛЕНИЕ ЭКОНОМНОГО МАРШРУТА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2501088C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОСТАВЛЕНИЯ НАВИГАЦИОННОГО ОТЧЕТА | 2009 |
|
RU2531563C2 |
| УЛУЧШЕННОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО И СПОСОБ | 2007 |
|
RU2459262C2 |

Изобретение относится к способам и системам навигации транспортного средства. Способ определения маршрута включает определение маршрута до пункта назначения, определение типа соединения беспроводного устройства к серверу и назначение допуска в соответствии с типом соединения. Допуск используется для определения, отклонилось ли транспортное средство от маршрута. Допуск увеличивается или уменьшается обратно пропорционально в соответствии со скоростью типа соединения. Допуск используется для определения точек, составляющих маршрут, таким образом, чтобы дороги, составляющие маршрут, находились в пределах ограниченной области. Ограниченная область может быть определена в сочетании с множеством линий, соединяющих последовательные точки вдоль маршрута. Способ включает в себя передачу определенных точек в компьютерную систему транспортного средства, соединенную с сервером. Обеспечивается предоставление более точного маршрута с большим количеством точек маршрута и большим объемом данных и с большей вероятностью определения отклонения от маршрута. 5 з.п. ф-лы, 7 ил.
1. Выполняемый на компьютере способ навигации, включающий в себя:
определение маршрута транспортного средства до точки назначения;
определение типа или скорости беспроводного соединения между сервером системы навигации и транспортным средством;
назначение допуска в соответствии с типом соединения, который будет использован для определения, отклонилось ли транспортное средство от маршрута, причем допуск увеличивают или уменьшают в обратной зависимости от типа и скорости соединения;
определение образующих маршрут точек с использованием назначенного допуска таким образом, чтобы дороги, составляющие маршрут, находились в пределах ограниченной области, определенной допуском; и
передачу определенных точек в компьютерную систему транспортного средства по беспроводному соединению.
2. Способ по п.1, отличающийся тем, что определение типа соединения включает в себя определение скорости или диапазона скорости.
3. Способ по п.1, отличающийся тем, что определение типа соединения включает в себя определение, установлено соединение через информационное соединение или голосовое соединение.
4. Способ по п.1, отличающийся тем, что может быть назначено ограниченное число допусков, причем больший допуск соответствует типу подключения с более низкой скоростью, а более низкий допуск соответствует типу подключения с более высокой скоростью, а оставшиеся допуски соответствуют типам соединения таким образом, что при увеличении скорости соединения допуски уменьшаются.
5. Выполняемый сервером способ по п.1, отличающийся тем, что ограниченная область - это область, содержащая линии между последовательными точками в качестве центральной оси, и допуск определяет расстояние от каждой стороны линии до внешней границы ограниченной области.
6. Выполняемый сервером способ по п.1, отличающийся тем, что ограниченная область - это область, содержащая линии между последовательными точками в качестве центральной оси, где допуск определяет расстояние, центрированное по оси относительно линий, таким образом, чтобы половина допуска была равна расстоянию от линии до внешней границы ограниченной области.
| US7734415 B2, 08.06.2010 | |||
| US7660667 B2, 09.02.2010 | |||
| US6510385 B2, 21.01.2003. |

