Область техники, к которой относится изобретение
Настоящее изобретение относится к способам и системам навигации транспортного средства, использующим определение местонахождения транспортного средства на основе GPS координат.
Уровень техники
Автомобильные навигационные системы, такие как бортовые системы и переносные GPS-системы известны уже в течение многих лет. Изначально эти системы получили картографическую информацию со съемного носителя, например, CD. Совсем недавно эти картографические системы стали оснащать внутренней памятью для хранения картографической информации.
Хотя некоторые системы хранят карты в локальной памяти, например на жестком диске, другие системы могут осуществлять связь с удаленной сетью для получения картографической информации. Эта информация, например, может быть направлена по ряду направлений через беспроводное соединение. В таких вариантах осуществления изобретения, как этот, когда картографические данные не сохраняются (или сохраняются частично) на локальном жестком диске, поставщик может быть ограничен, к примеру, полосой пропускания, т.е. скоростью прохождения данных.
По меньшей мере, в одной существующей системе (система Ford SYNC) компьютерная система транспортного средства (которая может включать в себя навигационную систему или может быть подключена к навигационной системе транспортного средства, находящейся в транспортном средстве или за его пределами) может быть подключена к удаленной сети при помощи IP-телефонии. Это подключение имеет ограниченную полосу пропускания и использует речевой диапазон беспроводного устройства, подключенного к компьютерной системе транспортного средства и удаленной сети.
Так как речевой диапазон имеет ограничения по доступной полосе пропускания, информация передается с очень низкой скоростью (по сравнению, например, с чистым информационным соединением). Обычно это не может повлиять на сценарий необходимости данных, так как пользователь может подождать. Но в некоторых случаях это может создавать проблему, например, при запросе направления движения в движущемся транспортном средстве. Если запрошенные инструкции по направлению движения не могут быть доставлены своевременно по имеющейся полосе пропускания, пользователь может пропустить первый и даже второй поворот на своем маршруте, до того, как инструкции будут переданы на транспортное средство (из-за того, например, что большой файл передается при помощи подключения с небольшой полосой пропускания).
Раскрытие изобретения
В первом представленном варианте осуществления настоящего изобретения способ включает в себя подготовку данных, содержащих инструкции по управлению транспортным средством, для передачи в транспортное средство (в частности, определение маршрута, определение предписанных точек вдоль маршрута и т.п.).
Этот показанный способ также включает в себя определение количества данных для передачи в первом пакете в компьютерную систему транспортного средства, взаимодействующую с сервером, выполняющим способ, на основании, по меньшей мере отчасти, скорости передачи данных и того, когда потребуется в транспортном средстве первый пакет с первой инструкцией по управлению транспортным средством для водителя.
Этот способ дополнительно включает в себя добавление определенного количества данных в пакет и передачу первого пакета данных в компьютерную систему транспортного средства, взаимодействующую с сервером.
Данный способ также включает в себя повторение этапов определения, добавления и передачи, пока не будут исчерпаны данные для отправки. Таким образом, пакеты поступают в транспортное средство и обрабатываются для выдачи до того, как потребуется первая инструкция для водителя в каждом пакете. Повтор зависит от остающихся для передачи данных.
Краткое описание чертежей
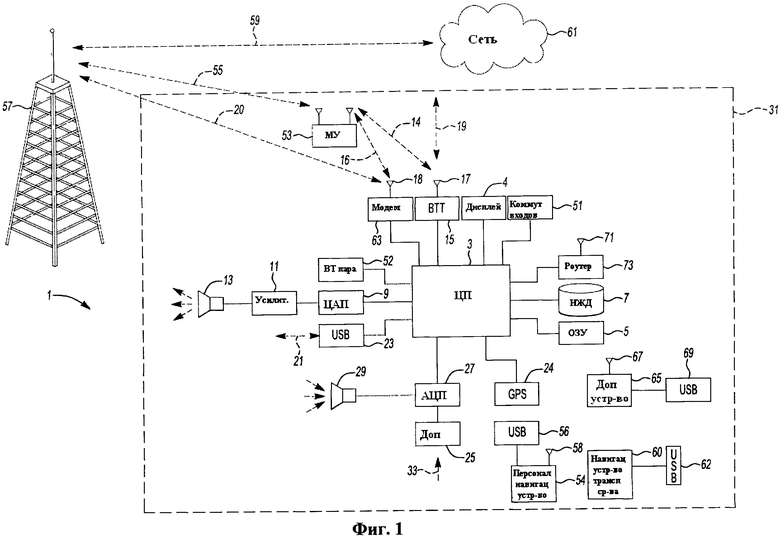
На Фиг. 1 показана модульная топология компьютерной системы транспортного средства;
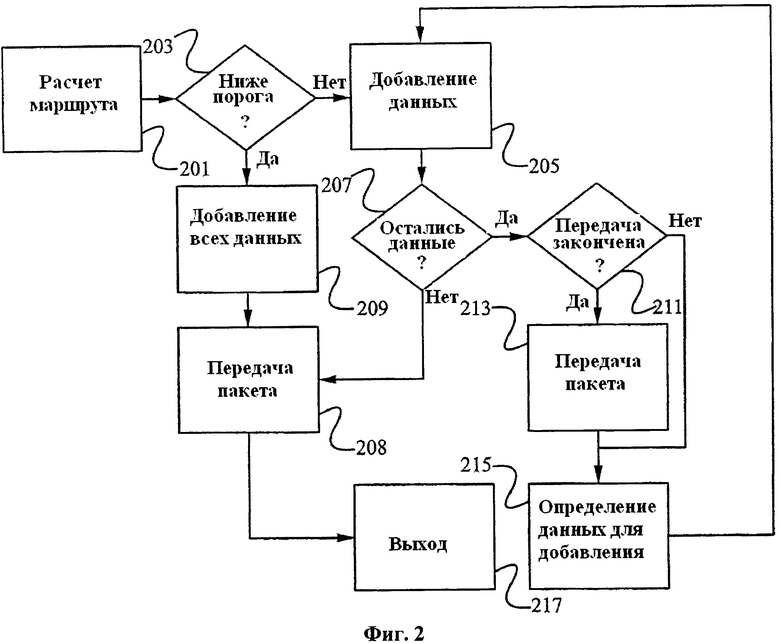
На Фиг. 2 показан пример процесса распределения схемы маршрута на множество пакетов;
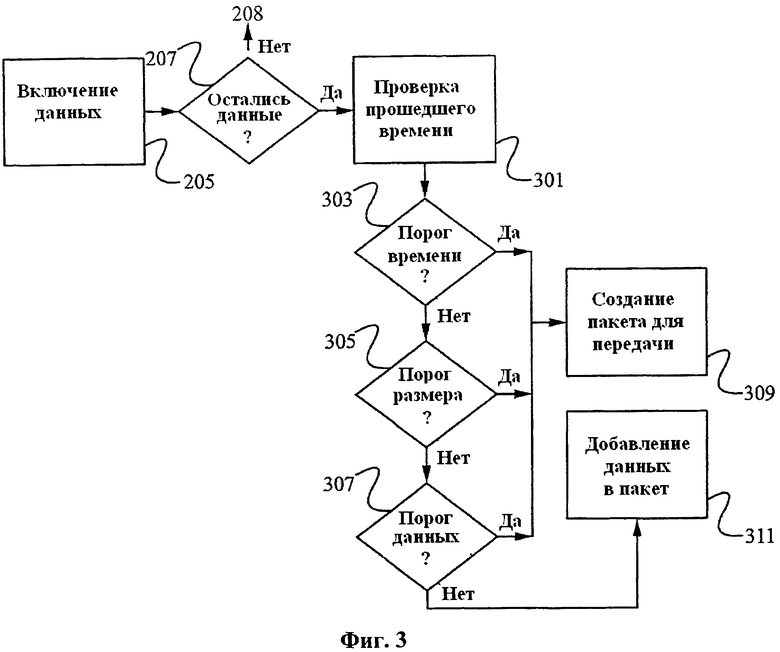
На Фиг. 3 показан пример процесса определения готовности пакета для передачи;
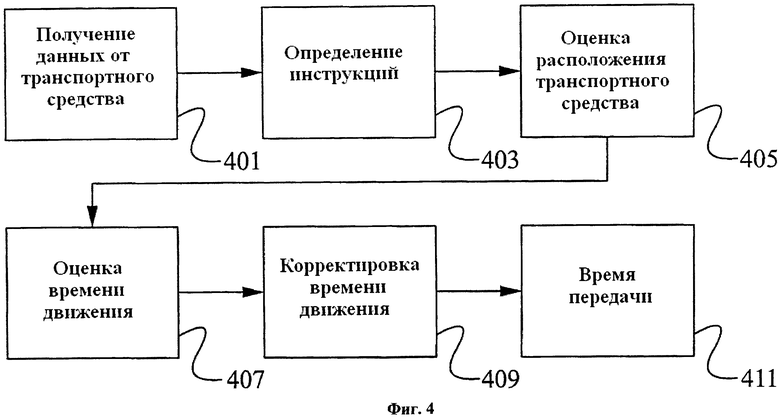
На Фиг. 4 показан пример процесса определения временного порога;
На Фиг. 5 показан пример достижения транспортным средством различных точек маршрута исходя из его скорости и возможностей съезда;
На Фиг. 6 показан пример расчета предполагаемой точки нахождения транспортного средства и количества включенных данных.
Осуществление изобретения
На Фиг. 1 показан пример модульной топологии компьютерной системы 1 транспортного средства (VCS) для транспортного средства 31. Примером такой компьютерной системы 1 транспортного средства является система SYNC, произведенная THE FORD MOTOR COMPANY. Транспортное средство с установленной компьютерной системой транспортного средства может содержать графический внешний интерфейс 4, расположенный в транспортном средстве. Пользователь также может взаимодействовать с этим интерфейсом при его наличии, например, с помощью сенсорного экрана. В другом представленном варианте осуществления взаимодействие осуществляется с помощью нажатия кнопок, голосовой связи и конструктивного синтеза речи.
В варианте осуществления изобретения, представленном на Фиг. 1, процессор 3 управляет, по меньшей мере, некоторыми этапами работы компьютерной системы 1 транспортного средства. Встроенный в транспортное средство процессор позволяет осуществлять обработку команд и стандартных программ непосредственно в самом транспортном средстве. Более того, процессор соединен с устройством 5 временного хранения и устройством 7 долгосрочного хранения. В представленном варианте осуществления устройством временного хранения является оперативное запоминающее устройство (ОЗУ), а устройством долгосрочного хранения - накопитель на жестком диске (НЖД) или флэш-память.
Процессор также оснащен рядом различных устройств ввода данных, позволяющих пользователю взаимодействовать с процессором. В представленном варианте осуществления изобретения предусмотрены микрофон 29, дополнительное устройство 25 ввода данных (на входе 33), USB устройство 23, устройство 24 GPS и BLUETOOTH устройство 15. Также представлен коммутатор 51 входов, который позволяет пользователю переключаться между различными устройствами ввода данных. Сигналы, поступающие на микрофон и дополнительный разъем, преобразуются из аналоговой формы в цифровую преобразователем 27 (АЦП) перед поступлением в процессор.
Устройства вывода данных системы могут включать в частности дисплей 4, динамик 13 или вывод для стереосистемы. Динамик соединен с усилителем 11 и получает сигнал от процессора 3 через цифроаналоговый преобразователь 9 (ЦАП). Вывод информации также может быть осуществлен на удаленное устройство BLUETOOTH, такое как персональное навигационное устройство 54, или USB устройство, такое как навигационное устройство 60 транспортного средства через двусторонние потоки 19 и 21 данных соответственно.
В одном варианте осуществления изобретения система 1 использует приемопередатчик 15 BLUETOOTH для соединения 17 с мобильным устройством 53 пользователя (например, мобильным телефоном, смартфоном, КПК и т.д.). Мобильное устройство в дальнейшем может быть использовано для соединения 59 с сетью 61 за пределами транспортного средства 31, например, с помощью канала связи 55 с вышкой 57 сотовой связи. В некоторых вариантах осуществления изобретения роль вышки 57 может выполнять точка доступа WiFi.
Пример соединения между мобильным устройством и приемопередатчиком BLUETOOTH представлен сигналом 14.
Команда установления соединения мобильного устройства 53 и приемопередатчика 15 BLUETOOTH может быть подана кнопкой 52 или с помощью аналогичного устройства ввода. В соответствии с этим на центральный процессор (ЦП) подается информация о том, что встроенный приемопередатчик BLUETOOTH будет соединен с приемопередатчиком BLUETOOTH на мобильном устройстве.
Обмен данными между ЦП 3 и сетью 61 может производиться с помощью, например, передачи информации на текущей частоте тарифного плана, на частотах выше частот передачи речи или с помощью двухтональных сигналов (DTMF), связанных с мобильным устройством 53. В альтернативном варианте осуществления изобретения может быть установлен встроенный модем 63 с антенной 18 для обмена 16 данными между ЦП 3 и сетью 61 на частотах, превышающих частоту передачи речи. В этом случае мобильное устройство 53 может быть использовано для соединения 59 с сетью 61 за пределами транспортного средства 31, например через соединение 55 с вышкой 57 сотовой связи. В некоторых вариантах осуществления изобретения модем 63 может устанавливать соединение 20 с вышкой 57 для соединения с сетью 61. В качестве не ограничивающего примера роль модема 63 может выполнять сотовый USB-модем и соединение 20 может быть сотовым соединением.
В одном варианте осуществления изобретения процессор снабжен операционной системой, включающей прикладной программный интерфейс для связи с прикладным программным обеспечением модема. Прикладное программное обеспечение модема может получать доступ к встроенному модулю или прошивке приемопередатчика BLUETOOTH для осуществления беспроводного соединения с удаленным приемопередатчиком BLUETOOTH (таким, как в мобильном устройстве).
В другом варианте осуществления изобретения мобильное устройство 53 содержит модем для обмена данными тональной частоты или широкополосного обмена данными. В варианте осуществления, где обмен данными происходит на частотах выше частот передачи речи, может использоваться техника, известная как частотное мультиплексирование, при которой пользователь мобильного устройства может использовать устройство для разговора прямо во время передачи данных. В других случаях, когда пользователь не использует устройство, для передачи данных может использоваться весь диапазон частот (например, от 300 Гц до 3,4 кГц).
Если у пользователя есть возможность передачи информации на текущей частоте тарифного плана для мобильного устройства, возможно, этот тарифный план обеспечивает передачу данных в диапазоне широких частот и система сможет использовать гораздо более широкий диапазон частот (увеличивая скорость передачи данных). В другом варианте осуществления изобретения мобильное устройство 53 заменено устройством сотовой связи (не показано), установленным на транспортном средстве 31. В еще одном варианте осуществления изобретения роль МУ 53 может выполнять устройство беспроводной локальной сети (LAN), выполненное с возможностью соединения, в частности, с сетью 802.11 g (например, WiFi) или сетью WiMax.
В одном варианте осуществления изобретения, входные данные могут быть переданы через мобильное устройство на частоте выше частоты передачи речи или на текущей частоте тарифного плана через встроенный приемопередатчик BLUETOOTH во внутренний процессор 3 транспортного средства. В случае если данные носят временный характер, данные могут храниться, например, на накопителе на жестком диске (НЖД) или другом носителе 7 до тех пор, пока они будут необходимы.
К дополнительным источникам, которые могут взаимодействовать с транспортным средством, относится персональное навигационное устройство 54, содержащее, например, USB-соединение 56 и/или антенну 58; или навигационное устройство 60 транспортного средства, содержащее USB-соединение 62 или другое соединение, встроенное устройство 24 GPS или удаленная система навигации (не показана), соединенная с сетью 61.
Более того, ЦП может устанавливать соединение с множеством дополнительных устройств 65. Эти устройства могут быть присоединены через беспроводное соединение 67 или проводное соединение 69. Также, или в качестве альтернативного варианта осуществления, ЦП может быть соединен с установленным в транспортном средстве беспроводным роутером 73, например, с помощью приемопередатчика 71 WiFi. Это позволяет ЦП устанавливать соединение с удаленными сетями в пределах досягаемости местного роутера 73. Дополнительное устройство 65 может представлять собой в частности персональные медиа-плейеры, беспроводные медицинские устройства, портативные компьютеры и т.д.
По крайней мере, в одной из приведенных систем для определения и передачи маршрута компьютерная система транспортного средства получает инструкции о маршруте от удаленной системы. В этом варианте осуществления настоящего изобретения фактический маршрут может быть рассчитан внешней системой и передан в компьютерную систему транспортного средства посредством беспроводной связи через беспроводное устройство. Из-за того, что полоса пропускания канала зависит от беспроводного устройства, может быть необходимо передавать информацию по частям. Это позволит быстро передать начальную информацию (напр., информацию, которую необходимо обработать немедленно после получения), а оставшаяся информация будет передана своевременно не срочным порядком.
В частности, может потребоваться несколько секунд для обработки и отправки запроса о направлении. Если все запросы были обработаны и отправлены, то в некоторых случаях задержка составит десятки секунд. Это может показаться незначительным количеством времени, но при езде со скоростью пятьдесят миль в час водитель может проехать 11 прилегающих улиц, составляющих двести футов, за тридцать секунд. Таким образом, особенно относительно первого поворота (или нескольких первых поворотов) необходимо доставить информацию о направлении быстро, чтобы она могла быть полезной для водителя.
В примере, показанном на Фиг. 2, внешняя система рассчитывает маршрут движения (этап 201). Для расчета маршрута из текущего местоположения до пункта назначения может быть использован любой подходящий процесс.
Как только маршрут движения рассчитан, система включает первый набор данных в первый пакет (этап 205). В этом показанном варианте осуществления настоящего изобретения первый набор данных содержит актуальные данные и первые инструкции (т.е. точку, где необходима реакция водителя на данные).
Механизм маршрутизации определяет все или по меньшей мере первую часть информации о маршруте движения и определяет, в какой точке необходимо передать первую инструкцию движения транспортному средству, на основании, по крайней мере отчасти, текущей скорости, направлении движения и местоположении (напр., когда запрашивается маршрут). Пример процесса оценки расположения транспортного средства показан на Фиг. 5 и 6 и подробно описан ниже. В некоторых вариантах осуществления изобретения, так как транспортное средство может двигаться во время запроса, расчета и последующей отправки информации, способ пакетирования может рассчитывать возможное перемещение транспортного средства во время обработки запроса.
Только если данных достаточно для заполнения первого пакета (этап 207) (т.е. не осталось данных после начального включения данных), все направления могут быть переданы в одном пакете. Кроме того, если полный набор направлений ниже порога определенного размера (этап 203) (таким образом, например, все направления могут быть доставлены быстро и в одной передаче), то система может включить все данные в один пакет (этап 209). Этот первый пакет может быть затем отправлен в компьютерную систему 208 транспортного средства.
Если остались данные, не добавленные в пакет для передачи (этап 207), то система определяет, готов или не готов первый пакет для передачи (этап 211). Этот способ подробно описан далее со ссылкой на Фиг. 3.
После того как пакет подготовлен к отправке, его отправляют (этап 213) в компьютерную систему транспортного средства. Показанный способ затем определяет по меньшей мере часть оставшихся данных для включения в следующий пакет (этап 215). Этот процесс определения подробно описан со ссылкой на Фиг. 4.
Если требуется дополнительный пакет для завершения передачи направлений, то процесс определения необходимых данных для добавления повторяется. Этот способ пакетирования (формирования пакетов) может продолжаться до исчерпания оставшихся инструкций для передачи, а затем прекращается (этап 217).
По меньшей мере в одном из примеров осуществления изобретения, первый и второй пакеты (при необходимости) включают в себя актуальные данные, но не более трех поворотов каждый, а все оставшиеся данные, если имеются, передаются в третьем и последнем пакете. Хотя данный пример не является ограничивающим, эта конфигурация определенно подходит для различных сценариев движения и приведет к отправке направлений без выхода за заданный временной порог. Если конкретный маршрут, например, превышает определенную длину или занимает слишком много времени на способ обработки, то первый пакет отправляется до окончания расчета всего маршрута.
На Фиг. 3 показан пример способа определения готовности пакета для передачи.
В этом показанном примере после того, как по меньшей мере одна инструкция включена в пакет (этап 205), а данные остались (этап 207), система определяет, сколько времени прошло с момента получения запроса маршрута (этап 301). Если затраченное время превышает временной порог (этап 303), то система готовит первый пакет для передачи (этап 309). Дополнительно система проверяет, достиг ли составленный пакет максимального размера (этап 305) или максимального количества данных (этап 307) (напр., по показателю направлений), включенных в конкретный пакет. Эти проверки определяют готовность пакета к передаче. Одна или более этих проверок могут быть исключены или могут быть использованы другие проверки, если необходимо, в дополнительном или альтернативном варианте осуществления изобретения.
В этом варианте осуществления настоящего изобретения система имеет встроенную проверку времени благодаря взаимодействию между немедленной передачей и временем обработки. Внешняя система имеет предел количества времени для расчета и/или отправки инструкций движения, потому что водитель может в это время двигаться, а длительная задержка инструкций движения приведет к пропуску водителем первого поворота.
Система может далее определить скорость транспортного средства на основе расстояния, которое транспортному средству необходимо проехать по данной дороге (или расчетную скорость движения транспортного средства), что дает время для дальнейших расчетов. В частности, если транспортное средство должно проехать 10 миль по определенной дороге, а дорога имеет ограничение скорости до тридцати миль в час, система определит, что первая инструкция о повороте не потребуется в течение нескольких минут. В дополнительном или альтернативном варианте осуществления изобретения можно установить заданный порог времени, чтобы гарантировать то, что слишком долгая задержка по времени не произойдет перед передачей инструкций или что время определения не превысит временной максимум для передачи (что приведет к ошибочному мнению водителя о том, что запрос не был обработан). Пример способа расчета временного порога показан на Фиг. 4.
Если достигнут максимальный размер пакета (этап 305), система также направит пакет на передачу (этап 309). Даже если водитель может ждать минуты или часы до того, как потребуется передача первой инструкции (т.е. там, где водителю нужно реагировать), то может быть необходимо, гарантировать то, что первый пакет попадет к водителю в течение предельного количества времени. На основании полосы пропуска канала и количества необходимого времени, ограничение по крайней мере размера начального пакета может гарантировать быструю отправку по крайней мере части маршрута, и водитель будет знать, что запрос получен.
В зависимости от конкретной программной реализации, определение "максимального числа инструкций" может привести к различному размеру данных. Как показано на Фиг. 5 и 6, система может рассчитать возможные местоположения транспортного средства до первого поворота и включить данные, относящиеся к этим местоположениям. Таким образом, транспортное средство, движущееся быстро по дороге с многочисленными вариантами съезда, имеет больший объем данных, связанных с первым поворотом, чем транспортное средство, едущее медленно или транспортное средство на дороге с малым количество съездов или без съездов до требуемого поворота. По крайней мере, в одном из показанных вариантов осуществления данного изобретения система ограничивает количество направлений, включенных в первый пакет, исходя из предопределенного порога (в частности два или три). Путем ограничения включенного количества направлений повышается вероятность того, что первый пакет будет отправлен незамедлительно, обеспечивая таким образом водителя по крайней мере первым набором поворотов вскоре после того, как запрос направления был сделан. Если количество инструкций в конкретном пакете максимально (этап 307), система отправляет пакет на передачу (этап 309).
Если ни один из заданных порогов не достигнут, система добавляет больше данных в пакет (этап 311).
На Фиг. 4 показан пример способа определения временного порога.
В этом показанном варианте осуществления настоящего изобретения способ пакетирования обеспечивается скоростью транспортного средства, направлением движения и текущим местоположением (этап 401) при запросе маршрута. Например, маршрут может быть запрошен во время движения транспортного средства через пригород на скорости двадцать миль в час.
После получения данных о местоположении транспортного средства происходит определение, где потребуется первая инструкция (этап 403). Это может быть инструкция о повороте, съезде, изменении направления и т.п. Так как транспортное средство может изменить местонахождение после отправки запроса на сервер, система может "предположить" где требуется поворот. В этом показанном варианте осуществления настоящего изобретения, где способ не ограничивается этим примером, предположение будет основываться на том, когда потребуется инструкция, если транспортное средство продолжает двигаться по этой же дороге, в том же направлении и с той же скоростью.
Исключения из предположения, конечно, существуют, если транспортное средство, например, запросит направления к пункту назначения в противоположном движению направлении. Эти исключения обрабатываются шаг за шагом или система применяет другой подходящий метод "предположения".
После определения того, когда потребуется поворот, в способе может быть оценено текущее положение транспортного средства (этап 405). Эта оценка снова может быть основана на данных, полученных на этапе 401. Без ошибки это возможно при использовании текущей скорости, направления движения и дороги, иначе возможна "наихудшая ошибка" в оценке. Другими словами, если транспортное средство свернуло с дороги во время запроса, то поворот замедлит его движение. Таким образом, любая требуемая точка после выполненного поворота может оказаться дальше от первой точки инструкции, если транспортное средство находилось на той же дороге. Соответственно, в данном изобретении система "предполагает" местонахождение транспортного средства на основании его движении по этой дороге в прежнем направлении и с прежней скоростью.
Конечно, дорожное движение и ограничения скорости изменяются на альтернативных маршрутах, что приводит к предположению о неоптимальности "данного маршрута". Но во многих случаях этого будет достаточно для адекватной приблизительной оценки местоположения автомобиля.
Когда известны местоположение транспортного средства и точка первой инструкции, система может оценить, сколько потребуется времени транспортному средству для достижения точки первой инструкции (этап 407). После приблизительной оценки местоположения, направления и скорости, основанной на известных данных, система использует эту информацию для оценки оставшегося времени движения к точке получения инструкции.
Это оставшееся время при необходимости может быть изменено (этап 409). В этом показанном примере заданное время обработки и передачи вычитается из оставшегося времени движения и оценивается оставшееся время до передачи инструкции. В данном варианте осуществления изобретении также желательно не передавать инструкцию водителю во время поворота (например, "повернуть сейчас"), таким образом вычитается время и на реакцию. Расчетное время может быть гибко и динамично настроено данной системой по необходимости.
Когда настроенное время получено (этап 409), система передает время способу, запрашивающему время (этап 411). Этот способ затем использует время движения для выполнения дальнейших вычислений, определяя без ограничений время передачи пакета.
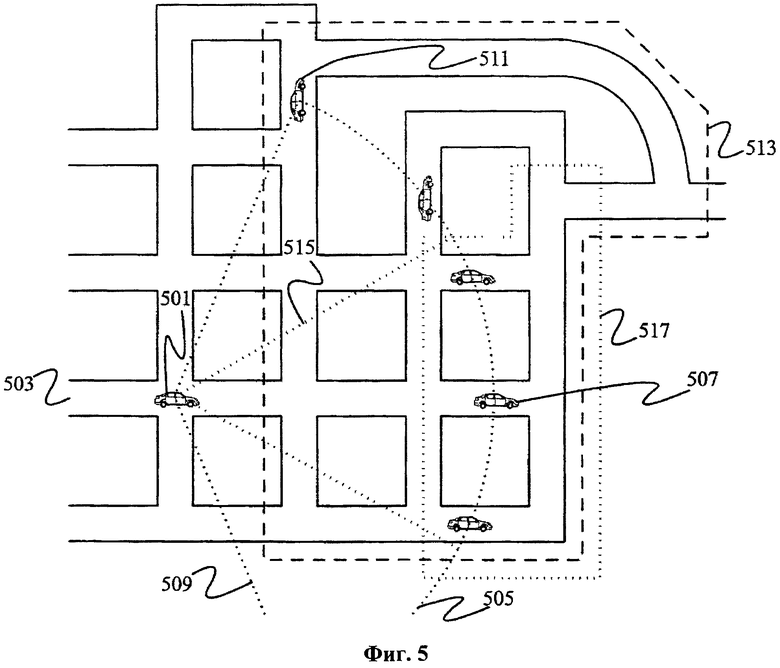
На Фиг. 5 показан пример достижения транспортным средством различных точек маршрута исходя из его скорости и возможностей съезда.
В данном показанном примере транспортное средство 501 движется по улице 503 в восточном направлении. Скорость его движения в этом примере составляет по грубой оценке три квартала в минуту. Измерение скорости квартал/минута используется в качестве примера, облегчает объяснение и не должно рассматриваться как ограничение. Подходящий стандарт измерения может применяться без ограничений - это мили или километры в час.
Как видно из пунктирной границы 505 и контура транспортного средства 507, транспортное средство может достичь разных точек в течение минуты. В этом изобретении возможные местоположения оцениваются внутри дуги 120 градусов, заданной пунктирной линией 509 ниже транспортного средства на чертеже и соответствующей пунктирной линией выше транспортного средства, основанной на текущем направлении, но система может оценить положение где угодно внутри окружности 360 градусов, если необходимо.
В зависимости от того, какая дорога следующая в наборе направлений, как видно из чертежа (например, если транспортное средство находится в позиции 511, двигаясь в северном направлении), могут потребоваться другие инструкции нежели те, которые были у транспортного средства в одном из местоположений вдоль внешней границы 505, двигающегося в восточном направлении. Соответственно, в этом примере, количество картографических данных, показанных внешней границей 513, передается так, что водитель может достичь желаемого маршрута из любой проектной точки. Это убирает необходимость новой отправки запроса серверу о направлении при отсутствии карты. Если данных недостаточно, то положение пользователя без карты ухудшается, и он может при худших условиях принимать ошибочные решения и выбирать неправильные направления, оставаясь без карты. Если полученных данных достаточно для определения любого положения транспортного средства, то пользователь получает правильные инструкции о движении из точки нахождения по маршруту.
Необходимость передачи достаточных данных уравновешивается потенциальной потребностью быстрой передачи. Если пользователь запрашивает информацию о направлении перед приближающимся поворотом (на заданном маршруте), то система может быть вынуждена передать направления того, как все данные для каждого возможного местоположения будут включены. В этом изобретении сначала включаются данные о текущей дороге/скорости/направлении, а затем все возможные данные, показанные внешней границей 517 в этом примере для дуги, заданной пунктирной линией 515 и ее двойником выше транспортного средства, распространяющейся в направлении движения транспортного средства.
Могут применяться другие подходящие стратегии в дополнительном или альтернативном варианте осуществления изобретения, в частности рассчитывающие маршрут на основе минимального времени движения от момента получения инструкций. Например, ожидается, что пользователь движется минимальное время до получения инструкций, и определение маршрута займет минимальное время движения для определения подходящего маршрута. Это может вызвать проблемы, если пользователь быстро подъезжает к съезду на трассе, а следующий съезд ближе тридцати километров. Система может иметь определенные встроенные ситуационные механизмы для решения проблем. С другой стороны, в предыдущем примере не существует опций выхода кроме одной, система возвращает инструкцию быстро в любом случае, если нет дополнительных расчетных точек положения транспортного средства (например, транспортное средство стоит на шоссе или съехало с него до получения инструкции).
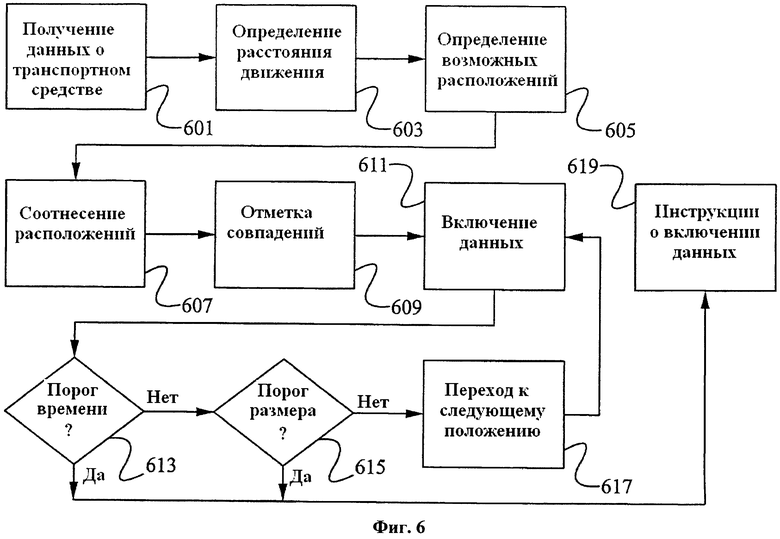
На Фиг. 6 показан пример расчета предполагаемого расположения транспортного средства и количество включаемых данных.
В данном варианте осуществления изобретения текущее местоположение транспортного средства, направление движения и скорость получены на этапе 601. Система затем определяет, как далеко может уехать транспортное средство за данное время, основанное на этих данных (этап 603). В этом простом примере система допускает, что транспортное средство может двигаться в любом прямолинейном направлении для оценки. Это значит, что она не учитывает возможное замедление на повороте и т.п. Более сложная система без ограничений учитывает факторы замедления, изменения скорости, знаки остановки, светофоры, вид дорожного движения и т.п. Но более сложный алгоритм замедляет обработку.
После получения оцененного приблизительного расстояния движения (этап 603) это расстояние переводится в ряд возможных местоположений транспортного средства (этап 605). Местоположения соотносят с картой (этап 607) и указывают, где расчетное местоположение совпадает с дорогой внутри нужной дуги (этап 609).
Получив расчетные точки нахождения внутри дуги, система определяет данные, включающие эти местоположения. В этом изобретении относительно простой способ включения данных представлен в качестве примера, хотя могут быть использованы более сложные алгоритмы.
В этом изобретении первое положение определяют относительно текущего (полученного) направления. Данные этого положения относительно первого поворота (или другая инструкция) включены (этап 611). Если пороговые время (этап 613) или размер (этап 615) не достигнуты, то система переходит к следующему положению (этап 617) и включает данные, относящиеся к прежнему положению (этап 611).
В одном показанном варианте осуществления этого изобретения способ систематически определяет положение над и ниже центра (текущего) направления, пока не будет достигнута максимальная дуга (или пороги времени и размера совпадут). В этом изобретении система начинает работу выше или ниже центрального положения, опираясь на направление приближающегося поворота. Например, если транспортное средство движется на восток и приближается правый поворот (направляющий транспортное средство на юг), то первая проверка будет юго-восток. Следующей проверкой будет подобная дистанция на северо-восток, и так будет повторяться, пока не совпадет окончательное направление.
В качестве варианта осуществления изобретения, система может проверить все точки юго-восточного направления (так как это возможное направление) до проверки любой точки в северо-восточного направления (или наоборот).
Эти стратегии разработаны для обеспечения набора данных, если порог времени/размера совпадет, раньше проверки всей дуги. Соответственно, любой алгоритм, обеспечивающий разумный результат в соответствии с желанием поставщика, может быть применен.
По достижении заданной конечной точки система передает инструкции о том, какие данные необходимо включить (этап 619).
Другой представленный вариант осуществления изобретения включает в себя читаемый компьютером носитель данных, хранящий инструкции, выполнение которых заставляет сервер готовить данные с инструкциями по управлению транспортным средством для передачи в транспортное средство. Определение количества данных для передачи в первом пакете в компьютерную систему транспортного средства, взаимодействующую с сервером, основано, по меньшей мере отчасти, на том, когда транспортному средству необходимо получить первый пакет, содержащий по меньшей мере первую инструкцию по управлению транспортным средством.
Сервер также добавляет определенное количество данных в пакет и передает первый пакет данных в компьютерную систему транспортного средства, взаимодействующую с сервером.
И наконец, сервер может повторять этапы определения, добавления и передачи, пока не будут исчерпаны данные для отправки. Таким образом, пакеты поступают в транспортное средство и обрабатываются для выдачи до того, как потребуется первая инструкция для водителя в каждом пакете. Повтор зависит от остающихся для передачи данных.
Одно представленное устройство включает программную логическую схему подготовки данных, содержащих инструкции по управлению транспортным средством для передачи в транспортное средство. Представленное устройство также включает в себя определяющую программную логическую схему для определения количества данных, передаваемых в первом пакете в компьютерную систему транспортного средства по каналу связи от сервера, основанную, по меньшей мере, на необходимости получения транспортным средством первого пакета с первой инструкцией водителю.
Устройство дополнительно включает в себя добавление программной логической схемой определенного количества данных и передачу программной логической схемой первого пакета данных по каналу связи от сервера в транспортное средство.
И, наконец, комплекс включает в себя повторные запросы программной логической схемой для определения, добавления и передачи программной логической схемы, пока не будут исчерпаны данные для отправки. Таким образом, требуемые пакеты, полученные транспортным средством, обрабатываются для выдачи данных в порядке, который зависит от первой инструкции для водителя в каждом пакете. Этот повтор зависит от оставшихся для передачи данных.
В то время как различные примерные, наглядные, не ограничивающие варианты осуществления изобретения были подробно описаны в настоящем разделе, специалисты в данной области техники могут найти различные альтернативные технические решения и варианты осуществления настоящего изобретения для применения настоящего изобретения, которые ограничены только следующей далее формулой изобретения.
Способ формирования пакетов включает в себя подготовку данных, содержащих инструкции движения для передачи в транспортное средство. Этот представленный способ также включает определение количества данных для передачи в первом пакете в компьютерную систему транспортного средства, соединенную с сервером, осуществляющим способ, на основании необходимости передачи в транспортное средство первого пакета с первой инструкцией для водителя. Этот способ дополнительно включает в себя добавление определенного количества данных и передачу первого пакета данных по каналу связи от сервера в транспортное средство. Данный способ также включает в себя повторение шагов по определению, добавлению и передаче, пока не будут исчерпаны данные для отправки. Таким образом, пакеты, полученные транспортным средством, обрабатывают для выдачи данных в порядке, который зависит от первой инструкции для водителя в каждом пакете. Повтор шагов зависит от остающихся для передачи данных. Изобретение позволяет осуществлять передачу информации своевременно. 10 з.п. ф-лы, 6 ил.
1. Выполняемый компьютером способ навигации транспортного средства, в котором:
подготавливают на сервере, удаленном от транспортного средства, данные, содержащие инструкции водителю для выполнения действий по управлению транспортным средством, для передачи в транспортное средство;
определяют количество данных, включенных в первый пакет, для передачи в компьютерную систему транспортного средства, взаимодействующую с сервером, на основании скорости передачи данных и того, когда транспортному средству требуется первый пакет, содержащий по меньшей мере первую инструкцию водителю для выполнения действия по управлению транспортным средством;
добавляют определенное количество данных в пакет;
передают первый пакет данных в компьютерную систему транспортного средства, взаимодействующую с сервером, и
в зависимости от остающихся для передачи данных повторяют этапы определения, добавления и передачи до тех пор, пока не будут исчерпаны данные для отправки, таким образом, чтобы пакеты поступали в транспортное средство и обрабатывались для выдачи до того, как потребуется первая инструкция в каждом пакете.
2. Способ по п. 1, отличающийся тем, что первая инструкция водителю требуется в транспортном средстве за предварительно определенное количество времени до начала выполнения водителем действия, предусмотренного этой инструкцией.
3. Способ по п. 2, отличающийся тем, что до подготовки данных, содержащих инструкции водителю, сервер способен оценивать время, оставшееся до выполнения водителем первого действия.
4. Способ по п. 3, отличающийся тем, что сервер выполнен с возможностью оценивать время, оставшееся до того момента, как водителю потребуется выполнить действие, на основании текущего направления движения, скорости и местоположения транспортного средства.
5. Способ по п. 1, отличающийся тем, что первая инструкция водителю требуется в транспортном средстве на предварительно определенном расстоянии до точки выполнения водителем этой инструкции.
6. Способ по п. 5, отличающийся тем, что до подготовки данных, содержащих инструкции водителю, сервер способен оценивать расстояние, оставшееся до точки, где водителю потребуется выполнить первое действие.
7. Способ по п. 6, отличающийся тем, что сервер выполнен с возможностью оценивать расстояние, оставшееся до точки, где водителю потребуется выполнить действие, на основании текущего направления движения, скорости и местоположения транспортного средства.
8. Способ по п. 1, отличающийся тем, что в нем используют не более трех пакетов, причем третий пакет содержит все данные, отсутствующие в первых двух пакетах.
9. Способ по п. 1, отличающийся тем, что первый пакет содержит не более трех инструкций для выполнения действий водителем.
10. Способ по п. 8, отличающийся тем, что второй пакет содержит не более трех инструкций для выполнения действий водителем.
11. Способ по п. 1, отличающийся тем, что сервер продолжает добавлять данные в каждый обрабатываемый пакет вплоть до достижения предварительно определенного времени до того момента, когда пакет потребуется водителю.
| US 7710421 B2, 04.05.2010 | |||
| WO 2010055509 A1, 20.05.2010 | |||
| US 2008147305 A, 19.06.2008 | |||
| KR 100804799 B1, 20.02.2008 | |||
| EA 200900801 A1, 26.02.2010 . |

