Изобретение относится к электромагнитному испытанию объектов, таких как, например, антенны, и, в более общем смысле, к испытанию излучающих объектов, содержащих антенны, соединенные с источником и/или интегрированным приемником, причем излучающие элементы рассматриваются как передатчики и/или как приемники электромагнитных излучений.
При различных применениях задача состоит в том, чтобы знать реакцию излучающих объектов на внешнее электромагнитное излучение.
В качестве примеров могут быть приведены испытания на мобильных телефонах или портативных компьютерах.
В целом, когда в оборудовании используется одна или более антенн, оборудование может подвергаться воздействию различных электромагнитных излучений, способных изменяться во времени и, например, нарушать прием полезных сигналов.
В случае, когда испытываемый объект содержит одну или более приемных антенн, трудно оценить, как испытываемый объект будет реагировать на электромагнитные излучения, которые могут возникать во время его использования в реальных условиях.
Конкретная задача состоит в формировании с помощью одного или более зондов для излучения электромагнитного излучения, направленного в сторону испытываемого объекта, электромагнитного сценария, представляющего реальную рабочую среду испытываемого объекта, то есть в подаче на каждый зонд входного сигнала, представляющего электромагнитный сценарий, в зависимости от которого он посылает в направлении объекта излучение, чтобы воспроизвести рабочую среду испытываемого объекта.
Такое испытательное устройство известно, например, US-A-2008/0056340.
Документ "Spatial Fading Evaluator for Handset Antennas", автор H. Iwai и др., опубликованный в I.E.E.E. 2005, стр.218-221, ссылка 0-7803-8683-6/05, также раскрывает устройство для оценки сигналов, принимаемых антеннами микротелефонных трубок в средах многолучевого распространения или с замираниями и посредством диффузоров, расположенных вокруг приемной антенны.
Документ "BER Evaluation System for a Handset Antenna in a Multipath Environment using a Spatial Fading Emulator", автор Tsutomu Sakata и др., в "Proceeding of ISAP 2005, Seoul, Korea", ссылка ISBN: 89-86522-78-0 94460, стр.351-354, также описывает устройство этого типа.
Эти известные устройства, однако, не формируют все возможные электромагнитные сценарии. Кроме того, они сложны для реализации.
Изобретение направлено на расширение возможностей формирования реальной электромагнитной среды испытательным устройством, которое может быть приспособлено ко всем существующим системам для улучшения возможных моделирований.
С этой целью, изобретение относится к способу электромагнитного испытания по меньшей мере одного объекта, способу, при котором электромагнитное излучение посылается посредством по меньшей мере одного зонда в определенном основном направлении наведения к определенной испытательной точке, в которой располагается испытываемый объект.
Изобретение отличается тем, что по меньшей мере один зонд и опора для испытываемого объекта перемещаются относительно друг друга посредством устройства механического перемещения в соответствии с перемещением, представляющим заданную статистику углового распределения относительно основного направления наведения для формирования посредством по меньшей мере одного зонда электромагнитного излучения, имеющего указанную заданную статистику углового распределения относительно основного направления наведения.
Благодаря изобретению, зонд или зонды могут колебаться относительно их направления наведения для формирования электромагнитного излучения, направленного к испытательной точке, но имеющего переменную точку происхождения и, следовательно угол падения, имеющий угловой разброс в реальном времени относительно определенного направления наведения, которое, фактически, является основным направлением освещения испытательной точки. Устройство механического перемещения может смещать зонд и опору для испытываемого объекта относительно друг друга в реальном времени по заданной траектории, которая определяется в зависимости от заданной статистики углового разброса. Измеряя реакцию испытываемого объекта на эту статистику углового разброса падающих электромагнитных излучений, можно раскрыть временную характеристику объекта, в которой статистика углового разброса излучения также является временной.
Также могут использоваться другие существующие системы, чтобы позволить изменять во времени электрические управляющие сигналы для управления зондом или зондами, в зависимости от которых зонд или зонды формируют значения электромагнитного поля, имеющие возможность регулирования по интенсивности или по фазе.
Перемещение, представляющее заданную статистику углового разброса, является угловым перемещением зонда, управляемого в соответствии с определенной статистикой. В каждый момент времени зонду назначаются определенный угол управления и определенная амплитуда электрических управляющих сигналов в соответствии с указанной статистикой, определенной компьютером. Зонд или зонды смещаются относительно испытываемого объекта (или испытываемый объект смещается относительно зонда или зондов) управляемым образом относительно заданного направления наведения зонда в направлении испытываемого объекта для воспроизведения сценария углового разброса. Компьютер выполнен с возможностью управлять двигателем устройства механического перемещения для перемещения зондов и/или испытываемого объект в соответствии с заданной статистикой углового разброса.
Изобретение поэтому позволяет воспроизводить электромагнитные сценарии, наиболее подходящие для каждого испытываемого объекта.
В соответствии с вариантом осуществления изобретения, упомянутое перемещение осуществляется в плоскости.
В соответствии с вариантом осуществления изобретения, упомянутое перемещение осуществляется в вертикальной плоскости для формирования заданного статистического углового разброса по возвышению посредством устройства перемещения.
В соответствии с вариантом осуществления изобретения, упомянутое перемещение происходит в горизонтальной плоскости для формирования заданной статистики углового разброса по азимуту посредством устройства перемещения.
В соответствии с вариантом осуществления изобретения, упомянутое движение является трехмерным для формирования заданной статистики углового разброса по возвышению и по азимуту посредством устройства перемещения.
В соответствии с вариантом осуществления изобретения, устройство механического перемещения обеспечивается между упомянутым по меньшей мере одним зондом и опорной конструкцией для поддержки по меньшей мере одного зонда.
В соответствии с вариантом осуществления изобретения, устройство механического перемещения содержит по меньшей мере одно устройство углового перемещения зонда при вращении вокруг испытательной точки в соответствии по меньшей мере с одной степенью свободы относительно опорной конструкции.
В соответствии с вариантом осуществления изобретения, упомянутый по меньшей мере один зонд является одним или более зондов в сети из множества зондов, поддерживаемых опорной конструкцией, причем каждый зонд имеет отдельное основное направление наведения в направлении испытательной точки.
В соответствии с вариантом осуществления изобретения, когда испытываемый объект крепится на опоре, устройство механического перемещения обеспечивает определенное перемещение опорной конструкции для поддержки зондов и опоры для испытываемого объекта относительно друг друга, чтобы подвергнуть упомянутый по меньшей мере один зонд движению, представляющему заданную статистику угла разброса относительно его основного направления наведения.
В соответствии с вариантом осуществления изобретения, испытываемый объект крепится на опоре, устройство механического перемещения совершает определенное перемещение опорной конструкции для поддержки зондов относительно неподвижной опоры испытываемого объекта, чтобы подвергнуть упомянутый по меньшей мере один зонд движению, представляющему заданную статистику углового разброса относительно его основного направления наведения.
В соответствии с вариантом осуществления изобретения, когда испытываемый объект крепится на опоре, устройство механического перемещения вызывает определенное перемещение опоры для испытываемого объекта относительно неподвижной опорной конструкции для поддержки зондов, чтобы подвергнуть упомянутый по меньшей мере один зонд движению, представляющему заданную статистику углового разброса относительно его основного направления наведения.
В соответствии с вариантом осуществления изобретения, опорная конструкция имеет форму дуги или кольца, на котором зонды поддерживаются в плоскости.
В соответствии с вариантом осуществления изобретения, опорная конструкция является трехмерной, имеющей форму, на которую опираются зонды, распределенные в трех измерениях.
В соответствии с вариантом осуществления изобретения, устройство механического перемещения обеспечивает совершение по меньшей мере одного заданного углового скользящего перемещения опорной конструкции и опоры для испытываемого объекта относительно друг друга по меньшей мере вокруг невертикальной геометрической оси.
В соответствии с вариантом осуществления изобретения, устройство механического перемещения обеспечивает совершение второго перемещения угла поворота перемещения опорной конструкции и опоры для испытываемого объекта относительно друг друга по меньшей мере вокруг вертикальной геометрической оси.
В соответствии с вариантом осуществления изобретения, опорная конструкция покоится на нижнем основании, и между основанием и опорной конструкцией обеспечивается вторая система углового перемещения для перемещения опорной конструкции относительно основания на второй угол с тем же самым абсолютным значением и противоположно скользящему угловому перемещению первого устройства механического перемещения опоры относительно опорной конструкции, так что опора для испытываемого объекта остается в заданном и, по существу, постоянном положении относительно вертикали, причем устройство механического перемещения для опоры относительно опорной конструкции называется первой системой относительного перемещения.
В соответствии с вариантом осуществления изобретения вторая система углового перемещения содержит множество опорных роликов для поддержки внешней изогнутой поверхности стенки опорной конструкции на основании и по меньшей мере один приводной двигатель для привода по меньшей мере одного из роликов для обеспечения поворота упомянутой внешней изогнутой поверхности стенки опорной конструкции относительно основания на упомянутый второй угол.
В соответствии с вариантом осуществления изобретения, также обеспечивается:
элемент управления для управления скользящим угловым перемещением первой системы относительного перемещения,
по меньшей мере один измерительный датчик для измерения фактического угла положения опоры для испытываемого объекта относительно вертикали,
контур обратной связи для управления двигателем привода в зависимости от угла, измеряемого датчиком, так чтобы угол, измеренный датчиком, был равен постоянному значению, соответствующему упомянутому заданному положению опоры относительно вертикали.
В соответствии с вариантом осуществления изобретения, обеспечивается множество зондов, распределенных равноугольно согласно по меньшей мере одной сферической координате вокруг одной и той же целевой точки зондов.
В соответствии с вариантом осуществления изобретения, по меньшей мере на одном зонде обеспечивается индивидуальная система регулирования для регулирования механического выравнивания зонда относительно целевой точки, причем целевая точка является точкой на опоре, в которой должен быть центрован измеряемый объект.
В соответствии с вариантом осуществления изобретения, индивидуальная система регулирования для регулирования механического выравнивания зонда связана по меньшей мере с одной камерой оптического обнаружения, расположенной в целевой точке для измерения механического выравнивания зонда.
В соответствии с вариантом осуществления изобретения, индивидуальная система регулирования для регулирования механического выравнивания зонда содержит средство привода упомянутого зонда на опорной конструкции для смещения зонда относительно опорной конструкции в соответствии по меньшей мере с одной степенью свободы, иначе чем в основном направлении наведения зонда в направлении измерительной точки.
В соответствии с вариантом осуществления изобретения обеспечивается модуль анализа изображения, подаваемого камерой для обнаружения в этом изображении траектории упомянутого зонда, и обеспечивается модуль обратной связи для управления средством привода для выравнивания обнаруженной траектории зонда с установленной траекторией, соответствующей выравниванию зонда на измерительной точке.
В соответствии с вариантом осуществления, заданная статистика углового разброса соответствует двойному экспоненциальному закону.
В соответствии с вариантом осуществления изобретения, заданная статистика углового разброса является гауссовой кривой, центрованной относительно основного направления наведения и имеющей угловой разброс, определяемый углом раскрыва, центрованным вокруг основного направления наведения, в котором передается половина максимальной энергии излучения.
В соответствии с вариантом осуществления изобретения, по меньшей мере один компьютер содержит интерфейс, позволяющий пользователю выбирать упомянутую статистику углового разброса,
компьютер вычисляет множество последовательных позиций углового управления для управления устройством механического перемещения относительно заданного основного направления наведения, которые устанавливаются в соответствии с выбранной упомянутой статистикой углового разброса,
компьютер посылает вычисленные последовательные положения углового управления по меньшей мере на один двигатель устройства механического перемещения, так что упомянутый по меньшей мере один зонд приводит определенные фактические последовательные положения в соответствии с последовательными положениями управления.
В соответствии с вариантом осуществления изобретения, компьютер вычисляет для каждого углового положения управления управляющий сигнал для управления интенсивностью и/или фазой электромагнитного излучения, излучаемого упомянутым по меньшей мере одним зондом.
Изобретение относится также к устройству для электромагнитного испытания по меньшей мере одного объекта, выполняющему способ испытания, как описано выше, причем устройство содержит по меньшей мере один зонд для испускания электромагнитного излучения в заданном основном направлении наведения в направлении заданной испытательной точки, в которой располагается испытываемый объект, а также опору для испытываемого объекта,
отличающемуся тем, что
испытательное устройство дополнительно содержит устройство механического перемещения для механического перемещения по меньшей мере одного зонда и опоры для испытываемого объекта относительно друг друга в соответствии с перемещением, представляющим заданную статистику углового разброса относительно основного направления наведения для формирования электромагнитного излучения, имеющего указанную заданную статистику углового разброса относительно основного направления наведения посредством по меньшей мере одного зонда.
Изобретение будет более понятно из последующего описания, приведенного исключительно для примера, не создающего ограничений, со ссылкой на чертежи, на которых:
фиг.1 - схематическое изображение вида сбоку варианта осуществления испытательного устройства, соответствующего изобретению,
фиг.2 - схематическое изображение вида сверху в перспективе внутренней части испытательного устройства в соответствии с вариантом осуществления изобретения,
фиг.3 - схематическое изображение другого вида сверху в перспективе внутренней части испытательного устройства, соответствующего варианту осуществления изобретения, также показывающее нижнюю часть опорной конструкции для поддержки зондов,
фиг.4 - открытое схематическое изображение спереди испытательного устройства, соответствующего варианту осуществления изобретения,
фиг.5 - схематическое изображение вида в поперечном разрезе части устройства, соответствующего варианту осуществления изобретения,
фиг.6-9 - схематическое изображение спереди в открытом виде испытательного устройства, соответствующего варианту осуществления изобретения в различных положениях скольжения,
фиг.10 - блок - схема устройства выравнивания зонда, соответствующего изобретению,
фиг.11-16 - примеры электромагнитных сценариев, которые могут воспроизводиться устройством, соответствующим изобретению, формирующим угол разброса в двух или трех измерениях,
фиг.17 - схематическое изображение вида сбоку испытательного устройства, соответствующего другому варианту осуществления изобретения,
фиг.18 - вид сверху испытательного устройства, соответствующего фиг.17,
фиг.19 - цифровой пример угла разброса как функции времени.
Изобретение описывается здесь далее сначала со ссылкой на фиг.1-16 для варианта осуществления, в котором упомянутый по меньшей мере один зонд является одним или более из сети множества зондов 2, поддерживаемых опорной конструкцией 3, причем каждый зонд имеет отдельное основное направление D наведения в направлении испытательной точки 40, и в котором устройство 6 механического перемещения подвергает опорную конструкцию зондов и опору 4 испытываемого объекта ОТ определенному относительному движению относительно друг друга, чтобы сформировать посредством упомянутого по меньшей мере одного зонда 2 движение, представляющее заданную статистику угла разброса относительно его основного направления D наведения. Основное направление D наведения, предположительно, фиксируется для каждого зонда 2. Каждый зонд 2 является, например, радиочастотным зондом.
В варианте осуществления, показанном на фиг.1-9, устройство 1 для электромагнитного испытания содержит электромагнитные зонды 2, прикрепленные к опорной конструкции 3. Для этой цели опорная конструкция 3 содержит опорные стойки 30 для поддержки зондов 2, причем эти стойки 30 имеют форму, например, дуги, проходят вертикально и являются, например, проводящими.
Устройство 1 также содержит опору 4 для поддержания одного или более испытываемых объектов, причем эта опора 4 является, например, мачтой.
Опорная конструкция 3 содержит по меньшей мере одну стенку 31, проходящую, соответственно, в трех измерениях пространства вокруг опоры 4 для испытываемого объекта, чтобы сформировать клетку Фарадея, полностью замкнутую вокруг испытываемого объекта, когда последний находится на опоре 4. Испытываемым объектом является, например, излучающий объект, как указано здесь ранее. Это предотвращает проникновение внешнего электромагнитного излучения внутрь закрытого пространства, ограниченного опорной конструкцией 3. Это также предотвращает выход из закрытого пространства, ограниченного опорной конструкцией 3, электромагнитных излучений, излучаемых зондами 2, и/или электромагнитных излучений, излучаемых испытываемым объектом, расположенным на опоре 4. На фиг.1-4 устройство электромагнитного испытания показано со снятыми участками стенки 31 опорной конструкции, чтобы показать внутренность последней.
Стенка 31 или стенки 31 крепятся к стойкам 30, чтобы предотвратить любую электромагнитную утечку внутрь или наружу, например, посредством способа крепления, показанного на фиг.5, который будет здесь далее описан более подробно.
На внутренней стороне, повернутой в направлении испытываемого объекта и опоры 4, опорная конструкция содержит безэховые электромагнитные поглотители 5, расположенные в промежутках между зондами 2. В результате, когда стойки 30, как показано, находятся внутри относительно стенки 31, стойки 30 покрыты безэховыми электромагнитными поглотителями 5, повернутыми в направлении измерительной точки 40 зондов 2, причем эта измерительная точка 40, в целом, находится выше или вблизи опоры 4, а испытываемый объект, в целом, должен быть центрован в этой измерительной точке 40. Стенка 31 покрыта с внутренней стороны безэховыми электромагнитными поглотителями 5, повернутыми в направлении измерительной точки 40, в которой испытываемый объект, расположенный на опоре 4, обычно должен быть центрован. Электромагнитные поглотители 5 должны быть, например, пирамидальными, как показано на чертеже. Некоторые из них могут быть, например, плоскими, чтобы покрывать основание 611 системы 6 относительного перемещения. Поглотители 5 не позволяют электромагнитному излучению, излучаемому зондами 2, и/или электромагнитному излучению, излучаемому испытываемым объектом, достигать стенки или стенок 31 и стоек 30 или сильно поглощаться последними, чтобы предотвратить резкое уменьшение отражений, которые могут быть вызваны стойками 30 и стенкой или стенками 31. На деле, стойки 30 являются, например, металлическими, в частности, изготовленными из стали или алюминия. Стенка или стенки 31 являются проводящими и изготавливаются из металла или другого проводящего материала, чтобы сформировать электрическую стенку. Каждая из них изготавливается, например, из алюминиевого листа. Электромагнитные поглотители 5 располагаются по всей внутренней поверхности конструкции 3 за исключением зондов 2, которые покрываются специальными электромагнитными поглотителями 51, например, плоской формы, как на фиг.2, или другой формы, как на фиг.3 и 4, поэтому поглотители 5 располагаются вокруг и между зондами 2, подогнанными к их специальным поглотителям 51.
Стенки 31 изогнуты, например, так, чтобы быть ориентированными в направлении опоры 4. Например, обеспечивается множество стенок 31, причем каждая из стенок 31 закрепляется между двумя соседними стойками 30. Стойки 30, например, показанные на фиг.1-4, имеют форму полукруглых дуг, проходящих вдоль меридиана сферы, чтобы придать опорной конструкции 3, в целом, сферическую форму. Как показано на чертеже, стенка или стенки 31, образующие клетку Фарадея, могут быть изогнуты, как показано на чертеже, только в вертикальном направлении, то есть, каждая из них формируется из участка цилиндра, у которого геометрическая ось горизонтальна. Стенка или стенки 31, образующие клетку Фарадея, могут также, в целом, иметь сферическую форму. Или стенка или стенки 31, образующие клетку Фарадея, могут также быть гранеными. Кроме того, в одной из стенок 31 обеспечивается дверь, позволяющая человеку входить в конструкцию 3, чтобы вносить и/или выносить испытываемый объект, располагающийся на опоре 4.
В варианте осуществления, показанном на фиг.5, стенка 31 крепится на внешней стороне стойки 30. Радиочастотное соединение 32 (также называемое RF - соединение) обеспечивается между стойкой 30 и стенкой 31, чтобы гарантировать герметичность в отношении электромагнитных излучений между внутренней и внешней средами. Такие RF - соединения 32 изготавливаются, например, из металлизированной резины, получаемой, например, с использованием плетеной металлической проволоки. Такое соединение 32 позволяет адаптироваться к изогнутым или граненым формам.
Кроме того, первый проводящий металлический обод 33 крепится к внешней стороне стойки 30 и RF - соединение образуется между первый ободом 33 и стенкой 31. Второй проводящий металлический обод 34 обеспечивается на внешней стороне стенки 31, обращенной к RF - соединению 32, причем стенка 31, следовательно, находится между вторым ободом 34 и RF - соединением 32. Первый обод 33, RF - соединение 32, стенка 31 и второй обод 34 скрепляются друг с другом винтами 35, проходящими через них с внешней стороны. Конечно, может использоваться любое другое крепежное средство 35. Эти крепежные средства 35, придвигая второй обод 34 ближе к первому ободу 33, позволяют сжать RF - соединение 32 для обеспечения неразрывности электромагнитного экранирования, а также прикрепить стенку 31 к стойке 30.
Как показано на фиг.2 и 3, для ужесточения опорной конструкции могут также обеспечиваться поперечные элементы 36 между стойками 30 позади поглотителей 5, между последними и стенкой 31. Кроме того, принцип электромагнитной герметизации, описанный в примере, показанном на фиг.5, может быть также использован для соединения стенок 31 посредством этих поперечных элементов 36 с точки зрения электромагнитной герметизации в случае, когда стенки 31 составляются из нескольких кусков в направлении меридиана.
Круговая геометрия стоек 30 в варианте осуществления, показанном на фиг.1-5, позволяет располагать зонды 2 равномерно вокруг опоры 4 и вокруг ее измерительной точки 40 в сферической геометрии. Например, угловое азимутальное расстояние между стойками 30 в форме круговых дуг является одним и тем же для всех стоек 30. Таким же образом, угол разброса между зондами 2, расположенными на одной и той же стойке 30, относительно горизонтальной оси, проходящей через измерительную точку 40 и перпендикулярно плоскости стойки 30, является, например, одним и тем же для всех зондов 2. Поэтому, если стойки 30 представляют меридианы сферы, то обеспечивается, например, первый набор из n зондов 2, обозначенный 2a, расположенный в одной и той же экваториальной плоскости, проходящей через измерительную точку 40, второй набор из n зондов 2, обозначенный 2b, расположенный во второй плоскости, параллельной первой экваториальной плоскости, и установленный со вторым отрицательным углом широты относительно первого набора 2а зондов, третий набор из n зондов 2, обозначенный 2c, расположенный в третьей плоскости, параллельной первой экваториальной плоскости, и смещенный на третий угол широты относительно этой экваториальной плоскости, причем этот третий угол имеет то же самое абсолютное значение, что и второй угол, но направлен в противоположном направлении, а также еще один зонд 2, 2d, расположенный на вершине сферы, то есть, в верхней точке пересечения стоек, образующей верхний полюс сферы. Зонды 2 находятся на равноугольном расстоянии от каждой из первой, второй и третьей плоскостей, указанных здесь выше. Второй угол и третий угол равны, например, 45° по абсолютному значению, с одними и теми же значениями углов широты между меридианами, образованными стойками 30. В варианте осуществления, показанном на фиг.2, этот угол, например, идентичен по долготе и широте, равняясь, например, 45°. В этом конкретном варианте осуществления зонды распределяются по m меридианам и p=m/2-1 плоскостям широты с зондом, как вариант, представленный на вершине конструкции 3.
В варианте осуществления, показанном на фиг.2-4, опора 4 находится внутри замкнутого объема, определяемого опорной конструкцией 3.
В варианте осуществления, показанном на фиг.1-9, система 6 перемещения для перемещения опорной конструкции 3 для поддержки зондов 2 и опоры 4 для поддержки испытываемого объекта относительно друг друга обеспечивается внутри закрытого объема, определяемого этой опорной конструкцией 3 и стенками 31. Эта система 6 перемещения позволяет относительно сдвигать опорную конструкцию 3 и опору 4 по отношению друг к другу в соответствии по меньшей мере с одной степенью свободы и, например, в соответствии по меньшей мере с двумя степенями свободы, как например, в соответствии по меньшей мере с одним угловым перемещением вокруг геометрической оси, проходящей через измерительную точку 40, которое может содержать, например, угловое перемещение A1 в первой негоризонтальной и, например, в вертикальной плоскости, проходящей через измерительную точку 40, и/или другим угловым перемещением в другой негоризонтальной и, например, вертикальной плоскости, проходящей через измерительную точку 40 и пересекающей первую плоскость и/или другим угловым перемещением вокруг вертикальной геометрической оси, проходящей через измерительную точку 40. В варианте осуществления, показанном на фиг.2-4, система 6 содержит средство для выполнения первого относительного углового перемещения опорной конструкции 3 для поддержки зондов и опоры 4 относительно друг друга в соответствии с первым скользящим углом A1 в негоризонтальной и, например, вертикальной плоскости (скользящее перемещение) и для выполнения другого относительного углового вращательного перемещения A3 в соответствии с другим углом вращения вокруг вертикальной геометрической оси, проходящей через измерительную точку 40, которое позволяет получить все относительные возможные перемещения зондов 2 относительно опоры 4 и измерительной точки 40 и, соответственно, выполнить пространственную супердискретизацию посредством сети зондов 2 во время измерения электромагнитного поля. Эта система относительного перемещения является такой, как описано, например, в документе WO 2010/006891.
Система 6 содержит первую систему 60 относительного углового перемещения для перемещения опорной конструкции 3 и опоры относительно друг друга в соответствии с первым углом A1 скольжения. Эта первая система 60 углового перемещения содержит, например, направляющий рельс 62 в виде дуги круга, прикрепленный к нижней и внутренней части опорной конструкции 3, в которой рельс 62 и паллета, поддерживаемая этим рельсом 62, следовательно, располагаются внутри замкнутого объема, определяемого опорной конструкцией 3, стенками 31 и нижней частью. Паллета 610 может перемещаться по углу в соответствии с первым углом A1 скольжения по рельсу 62, причем обеспечивается средство 620 для перемещения паллеты 610 по рельсу 62. Обеспечивается другая система 601 относительного перемещения для перемещения опоры 4 для испытываемого объекта и опорной конструкции 3 при вращении относительно друг друга вокруг вертикальной оси, например, за счет того, что опора 4 монтируется на паллете 610 посредством средства 613 вращения, которое позволяет опоре 4 поворачиваться относительно паллеты 610 по углу в соответствии с углом вращения A3. Это средство 613 вращения позволяет конструкции 3 и опоре 4 поворачиваться относительно друг друга. На фиг.3 и 4 показан обшивочный лист 611 системы 6, которая также покрывается поглотителями 5 и имеет в упомянутом листе проход 612 для перемещения опоры 4, причем нижняя проводящая стенка 37, формирующая клетку Фарадея, обеспечивается под системой 6 перемещения. Система 6 относительного перемещения, служащая для перемещения опорной конструкции 3 и опоры 4 для испытываемого объекта относительно друг друга, следовательно, полностью содержится внутри "интегрированной фарадизации" измерительной системы, что позволяет избежать, например, любого отверстия в нижней стенке 37 и, следовательно, любого разрыва фарадизации для пропускания через нее опоры 4. Система 6 покрывается электромагнитными поглотителями 5, 51 посредством обшивочного листа 611 и, следовательно, позволяет получить непрерывность "интегрированной безэховости" измерительной системы, которая, например, избегает любого разрыва покрытия поглотителей и, следовательно, любого паразитного отражения и/или диффракции.
Устройство механического перемещения для перемещения по меньшей мере одного зонда и испытываемого объекта относительно друг друга, чтобы подвергнуть по меньшей мере один зонд относительному движению, представляющему заданную статистику угла разброса относительно основного направления D наведения, чтобы сформировать электромагнитное излучение, имеющее эту заданную статистику угла разброса относительно направления наведения, посредством по меньшей мере одного зонда, формируется, например, системой 6 перемещения, чтобы подвергать зонд перемещению на первый относительный угол A1 скольжения в вертикальной плоскости и на второй относительный угол A3 вращения вокруг вертикальной оси. Заданная статистика угла разброса может быть углом в одном измерении (плоским углом) или в двух измерениях (пространственным углом). Испытательная точка показана как измерительная точка 40, в которой должен быть расположен измерительный объект и которая представляет направление наведения каждого зонда 2 в направлении испытательной точки 40. Компьютер обеспечивается для посылки через соответствующий интерфейс вывода электрических сигналов управления команд углового перемещения, соответствующих первому и/или второму углу, на привод устройства механического перемещения, причем эти команды, соответствующие в реальном времени заданной статистике угла разброса, могут выбираться заранее на компьютере с помощью соответствующего интерфейса. Как следствие, система 6 перемещает опору 3 для зондов и испытываемый объект, помещенный в измерительную точку, относительно друг друга на первый и/или второй угол, соответствующий заданной статистике угла разброса.
Конечно, только первая система 60 относительного углового перемещения для перемещения опорной конструкции может формировать это устройство механического перемещения, чтобы подвергнуть зонд только первому относительному скользящему угловому перемещению в вертикальной плоскости, или только вторая система 601 перемещения обеспечивается для перемещения опоры 4 испытываемого объекта и опорной конструкции 3 при вращении относительно друг друга вокруг вертикальной оси, чтобы подвергнуть зонд перемещению только на второй относительный угол вращения вокруг вертикальной оси.
Например, в варианте осуществления опорная конструкция 3 неподвижна и существует опора 4, которая движется системой 6, 60, 601 относительного перемещения относительно опорной конструкции 3.
Например, в другом варианте осуществления опора 4 неподвижна и существует опорная конструкция 3, которая перемещается системой 6, 60, 601 относительного перемещения относительно опоры 4.
Например, в другом варианте осуществления, опорная конструкция 3 перемещается относительно фиксированной опорной точки в соответствии с одним из углов A1 и A3 посредством системы 6, 60, 601 относительного перемещения и относительно той же самой фиксированной опорной точки опора 4 движется посредством системы 6, 60, 601 относительного перемещения согласно другому из углов A1 и A3.
Конечно, может обеспечиваться единый зонд 2 на опорной конструкции 3, отличной от той, что описана здесь ранее.
Кроме того, как сказано выше, опорная конструкция 3 может быть отличной от той, которая описана здесь далее.
В варианте осуществления изобретения обеспечивается другая вторая система 63 для перемещения опорной конструкции 3 относительно основания 61 между нижним основанием 61, предназначенным для расположения на земле, и опорной конструкцией 3, внутри которой крепится первая система 6 относительного перемещения опорной конструкции 3 относительно опоры 4 для испытываемого объекта. Эта вторая система 63 углового перемещения подобна первой системе 60 углового перемещения и способна перемещать опорную конструкцию 3 относительно основания 61 по углу в той же самой вертикальной плоскости, но на второй угол A2 скольжения, противоположный первому углу A1 скольжения (второй угол A2 имеет то же самое абсолютное значение, что и первый угол А1, но его направление противоположно первому углу А1), так что опора 4 остается, по существу, в заданном вертикальном положении, чтобы компенсировать в реальном времени шарнирное движение опоры 4 и исключить влияния гравитации на эту опору 4. Второй угол A2 скольжения и первый угол A1 скольжения расположены вокруг одной и той же геометрической оси X, являющейся осью, проходящей через измерительную точку 40, и являющейся, например, горизонтальной.
Для первой вертикальной плоскости на фиг.6-9 показан вариант осуществления второй системы 63 относительного перемещения для перемещения опорной конструкции 3 относительно основания 61. Эта система 63 содержит несколько роликов, направляющую и виток внешней поверхности 310 стенок 31 опорной конструкции 3, причем эта внешняя поверхность 310 является, например, изогнутой и сферической. Один или более роликов 631b из числа роликов 631 приводится во вращение двигателем 64, чтобы вращать внешнюю поверхность 310 относительно основания 61 на второй угол A2. Ролики 631 находятся в шасси 67, обеспечивающем проход внешней поверхности 310 между роликами 631, это шасси 67 имеет, например, изогнутую и вогнутую поверхность в направлении поверхности 310, причем это шасси 67 является, например, подвешенным или, так называемыми, скользящими салазками, и образуется участком сферы. Конечно, могут обеспечиваться несколько роликов 631, направленных параллельно оси, вокруг которой выполняются угловые перемещения A1 и A2, а также несколько других роликов, параллельных одному или более другим направлениям, чтобы ограничивать ход поверхности 310 по шасси 67.
Ниже здесь описывается рабочий пример систем 6 и 63 со ссылкой на фиг.7 и 8, где они показаны в разобранном и воображаемом виде со ссылкой на фиг.7 и 8, когда они перемещаются из положения, показанного на фиг.6, в положение, показанное на фиг.9.
Используя элемент управления, пользователь управляет угловым перемещением первой системы 60, чтобы относительно сдвинуть опорную конструкцию 3 для опоры зондов 2 и опору 4 для испытываемого объекта ОТ по отношению друг к другу на первый определенный угол A1 скольжения вокруг первой геометрической оси X, как показано на фиг.7. На фиг.7 показано гониометрическое движение A1 опоры 4 относительно конструкции 3, причем углы A1 и A2 первоначально предполагаются равными нулю, как показано на фиг.6.
На опоре 4 для испытываемого объекта ОТ предусмотрен датчик 66 для измерения реального угла наклона опоры 4 относительно вертикали. В положении, показанном на фиг.6, этот датчик 66 поэтому измеряет реальный угол отклонения, являющийся нулевым относительно вертикали. В воображаемом положении, показанном на фиг.7, этот датчик 66 поэтому измеряет реальный угол A1 наклона относительно вертикали.
Двигатель 64 и датчик 66 присоединяются к контуру обратной связи, чтобы управлять двигателем 64 привода как функцией реального угла наклона опоры 4 относительно вертикали, мгновенно измеряемого датчиком 66.
Контур 65 имеет корректор, у которого в качестве установочной точки используется измеренный угол датчика 66 нуля, соответствующего положению опоры 4. Корректор действует по команде двигателя 64, чтобы корректировать реальный угол, измеренный датчиком 66, и делать его равным этой установочной точке.
В воображаемом положении на фиг.8 с помощью ролика 631b, приводимого в движение двигателем 64, этот контур 65 обратной связи поворачивает поверхность 310 и опорную поверхность 3 для зондов 2 на угол A2, равный противоположному реальному углу A1 отклонения, измеренному датчиком 66, вокруг геометрической оси X относительно неподвижного основания 61 и неподвижного шасси 67. На фиг.8 показано обратное вращение A2 поверхности 310 опорной конструкции 3 для зондов 2 относительно основания 61.
На фиг.9 комбинация гониометрического движения A1, показанного на фиг.7, и обратного вращения A2, показанного на фиг.8, перемещает опору 4 объекта ОТ обратно в заданное положение, показанное на фиг.6, относительно вертикального заданного положения, так называемого, вертикального, в котором мачта 4 считается расположенной вертикально.
Гониометрическое движение A1, показанное на фиг.7, и обратное вращение A2, показанное на фиг.8, являются одновременными и синхронизированными контуром 65 обратной связи по положению. Вертикальность мачты 4 обеспечивается постоянно. Поэтому, как только первая система 60 движется, чтобы переместить по углу опору 4 вокруг оси X, контур 65 вызывает угловое перемещение опорной конструкции 3 для зондов 2 в обратном направлении, чтобы поддерживать опору 4 вертикальной. Фиг.7 и 8 являются воображаемыми, где гониометрическое движение и обратное вращение показываются выполняемыми небольшими последовательными шагами, которые не наклоняют опору 4, как это показано. Наконец, только на фиг.9 показана опорная конструкция 3 зондов 2, которая повернута на первый угол A1 относительно опоры 4, причем последняя остается в одном и том же положении по вертикали во время всего движения.
На деле, качание опоры 4 относительно вертикали может вызывать изгиб последней на высоте, разделяющей измерительную точку 40, в которой должен быть расположен испытываемый объект, и опорную конструкцию 3, что может дать ошибку при определении расположения измерительной точки 40. На деле, при определении положения измерительной точки 40 относительно теоретической точки соединения пересечений зондов 2 требуется высокий уровень точности. Измерительная точка 40, в которой располагается испытываемый объект, должна находиться в этой теоретической точке наведения пересечения зондов 2 или быть очень близка к этой теоретической точке наведения пересечения зондов 2. Например, для рабочей частоты зондов 6 ГГц измерительная точка 40 должна находиться в теоретическом кубе со стороной 1,5 мм вокруг этой теоретической точки наведения пересечения зондов 2. Для зондов, работающих на частоте 18 ГГц, измерительная точка 40 должна находиться в теоретическом кубе со стороной 500 мкн вокруг этой теоретической точки наведения пересечения зондов 2. В результате, изгиб опоры 4, который вызывается ее наклоном относительно вертикали, приводит к риску выхода измерительной точки из допусков по позиционированию. Благодаря двум комплементарным системам углового позиционирования, упомянутым здесь выше, конкретно, первая система 60 углового позиционирования опоры 4, расположенной внутри опорной конструкции 3, и вторая система 63 углового позиционирования, расположенная между опорной конструкцией 3 и основанием 61, прикрепленным к земле, опора 4 удерживается в заданном вертикальном положении и существует опорная конструкция 3, которая движется по углу относительно основания и опоры 4 испытываемого объекта. Эта двойная система называется антигравитационной. Эта двойная система позволяет совершенно просто помещать на опору 4 тяжелые объекты, не создавая при этом риск изгиба опоры 4 или даже повреждения опоры 4 или даже падения из-за чрезмерного отклонения и ухудшения точности измерений или даже осуществимости измерений. Кроме того, эта антигравитационная система позволяет, например, иметь большее угловое пространство между зондами 2 и, следовательно, увеличивать количество зондов 2, поскольку траектория гониометрического движения системы 6 более не ограничивается по амплитуде из-за ограничений по изгибу и скручиванию опоры 4. Эта, так называемая антигравитационная система позволяет выполнять угловые разбросы при увеличенных углах раскрыва, уничтожая механические ограничения по изгибу, вызываемые испытываемым объектом во время шарнирного поворота опоры 4.
На фиг.11-16 показаны примеры угла разброса.
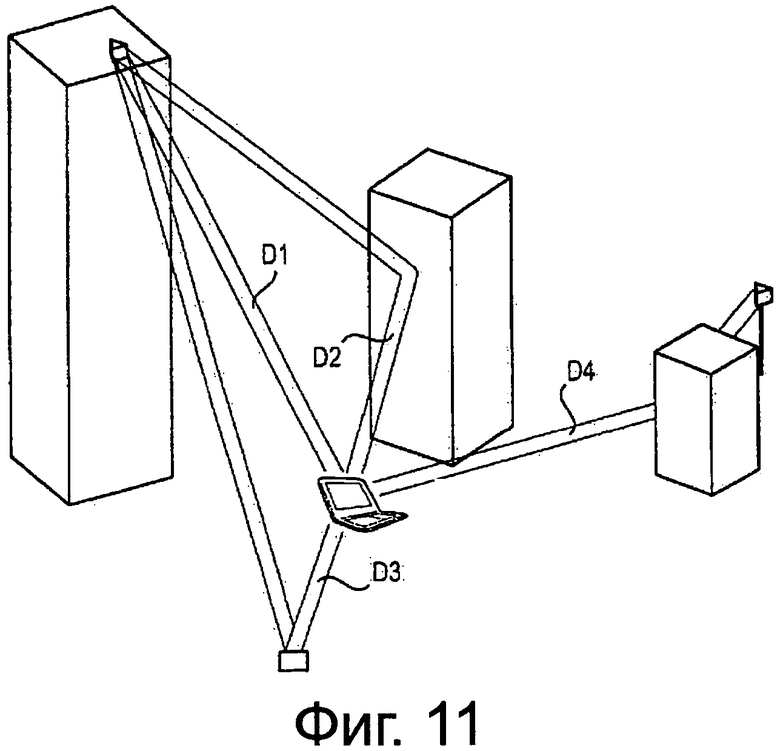
На фиг.11 по каналу распространения сигнал прибывает с нескольких направлений: основное направление D1, соответствующее направлению "базовая станция - мобильное средство", а также со вторичных направлений D2, D3, созданных отражением основного сигнала от зданий и препятствий. Могут также существовать помеховые сигналы D4, приходящие от других источников нежелательного излучения. Все эти направления D1, D2, D3, D4 устанавливают направления, известные как направления прибытия, осуществленные посредством "пятен", как показано на фиг.11, который представляет заданный сценарий распространения.
Фиг.12 является повторением в отношении направлений прибытия, показанных на фиг.11, в плоскости возвышений. Если вертикальная секция изготавливается по сценарию, показанному на фиг.11, приемная антенна ОТ видит прямые и непрямые траектории D1, D2, D3 и D4, проектируемые в вертикальную плоскость прибытия в соответствии с 4 различными углами возвышения. Этот раздел сценария распространения может воспроизводиться посредством устройством электромагнитного испытания, сформированным вертикальной измерительной дугой 101, на которой зонды 102 распределены в вертикальной плоскости на опорной конструкции 103 в форме дуги или кольца и обеспечивается опора 104 для испытываемого объекта ОТ. Эту первую систему 60 углового перемещения в соответствии с первым углом A1 скольжения в плоскости дуги вокруг измерительной точки 40, в которой на опоре 4 обеспечивается испытываемый объект ОТ, обеспечивают для перемещения опорной конструкции 103 зондов 102 и опоры 104 испытываемого объекта относительно друг друга, причем обеспечивают, например, вторую систему 63 углового перемещения и элементы, подобные тем, которые описаны выше, с аналогичным порядком работы.
Полагая, что на фиг.13 опорная конструкция 103 и опора 104 неподвижны, на испытываемый объект поступает энергия, приходящая с различных направлений D1, D2, D3 и D4 каждой из траекторий прибытия в соответствии с углами возвышения, обозначаемых, в целом, ссылочной позицией D. На фиг.13 эти направления D1, D2, D3 и D4 прибытия показываются столбиками, высота которых пропорциональна энергии, которую они транспортируют, как функции их угла возвышения 9. Этот фиг.13 соответствует плотности вероятности мощности, принятой испытываемым объектом, как функции угла возвышения.
Но в реальной среде рядом с этими основными направлениями D1, D2, D3 и D4 совместно существуют другие направления прибытия. Из-за этого в реальной среде мобильное средство видит сигнал, прибывающий не только с основного направления, но также и с других направлений, разбросанных вокруг него. Этот разброс описывается в соответствии с законом плотности вероятности, то есть, вероятностью, что энергия будет прибывать с заданного направления пространства. Разброс следует хорошо известному математическому закону, для которого параметрами являются основной угол прибытия D и угол разброса, причем угол разброса соответствует определению угла раскрыва, в котором принимается половина энергии, передаваемой на основном направлении прибытия.
Опорная конструкция 103 для зондов 102 и опора 104 для испытываемого объекта ОТ перемещаются относительно друг друга за счет действия первой системы 60 углового перемещения (гониометрическое движение) соответственно первому углу A1 скольжения, соответствующему углам 9 возвышения, например, так что падающая энергия вокруг каждого направления D, видимого испытываемому объекту ОТ, находящемуся на опоре 104, соответствует гауссову распределению, например, как функция угла 9 возвышения. На фиг.14 показан пример представления падающей энергии, видимой испытываемым объектом ОТ по возвышению, вокруг каждого направления D, соответственно гауссову распределению, когда приводится в действие гониометр 60, формирующий качание ±10° вокруг центрального положения каждого основного направления D1, D2, D3 и D4 прибытия. Очевидно, что сформирован разброс падающей энергии вокруг направлений D1, D2, D3 и D4 прибытия по возвышению. В целом, значение углового перемещения может быть выбрано как ненулевое и меньшее, чем пространство между двумя соседствующими зондами, чтобы создать предпочтительный угол раскрыва.
Воспроизведение направлений прибытия по азимуту описывается здесь ниже на фиг.15.
На фиг.15 представлен горизонтальный участок сценария, показанного на фиг.11; приемная антенна ОТ видит проекции на горизонтальную плоскость прямых и косвенных путей D1, D2, D3 и D4 прибытия в соответствии с 4 различными углами азимута.
Этот раздел сценария распространения может воспроизводиться, используя устройство электромагнитного испытания, образованное горизонтальной измерительной дугой 201, на которой зонды 202 распределяются в горизонтальной плоскости на опорной конструкции 203 в форме дуги или кольца, и обеспечивается опора 4 для испытываемого объекта ОТ. Обеспечивается другая система 601 перемещения опоры 4 испытываемого объекта и опорной конструкции 3 при вращении относительно друг друга вокруг вертикальной оси соответственно углу по азимуту в плоскости дуги вокруг измерительной точки, где на опоре 4 обеспечивается измеряемый объект ОТ. Например, существует опора 4, которая вращается вокруг вертикальной оси за счет средства, описанного ранее.
Например, угол раскрыва является ненулевым и меньшим или равным 20°.
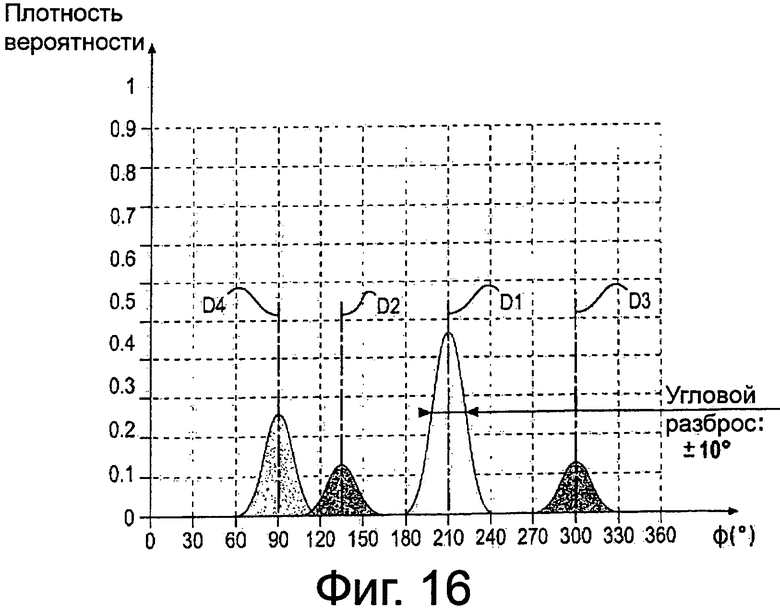
Опорная конструкция 203 для зондов 202 и опора 4 для испытываемого объекта ОТ перемещаются относительно друг друга за счет приведения в действие системы 601 перемещения при вращении соответственно на угол Ф по азимуту, например, так что падающая энергия вокруг каждого направления D, видимого испытываемому объекту ОТ на опоре 104, соответствует гауссову распределению, например, как функция угла Ф по азимуту. На фиг.16 показан пример представления падающей энергии, видимой испытываемым объектом ОТ по азимуту вокруг каждого основного направления D соответственно гауссову распределению, когда приводится в действие вращающее устройство 601, формирующее качание ±10° вокруг центрального положения каждого основного направления D1, D2, D3 и D4 прибытия. Очевидно, что сформирован разброс падающей энергии вокруг направлений прибытия по азимуту.
Используя устройство 1 для электромагнитного испытания, описанное здесь ранее, например, в форме трехмерной сферы, комбинация угла разброса по возвышению и по азимуту может воспроизводиться в соответствии с фиг.14 и 16, объединяя качательное движение (скольжение) гониометра 60 и вращение 601 опоры 4. Это приводит в результате к углу разброса в трех измерениях, чтобы представить канал распространения в 3 измерениях в пространстве.
Углы разброса в 2 измерениях преобразуют только проекцию основного направления и направления разброса (следовательно, подход ограничен), тогда как угол разброса в 3 измерениях представляет реальный канал распространения в 3 измерениях.
Углы разброса создаются физически посредством гониометра (2D по вертикали, 2D обозначает два измерения), оси вращения по азимуту (в двух измерениях по горизонтали) и комбинации их обоих (3D, 3D обозначает три измерения). Двойной способ состоит из использования движений для ориентации зондов, оставляя испытываемую антенну неподвижной.
Вариации по амплитуде и по фазе измерительного зонда также могут связываться с их механическими движениями, чтобы создавать и уточнять желаемый закон распределения вероятностей (гауссов, двойной экспоненциальный и т.д.). Например, механические движения гониометра и/или оси азимута, связанные с вариацией амплитуды облучающих зондов, используются для создания закона распределения вероятности угла разброса на испытываемом объекте.
Например, углы разброса, выбранные вокруг фиксированного значения равны + или - 10 градусов (или весь размах механического движения равен 20 градусов).
Существуют несколько способов создания угла разброса:
- посредством механических движений гониометра (2D), вращения по азимуту (2D) или комбинации обоих способов (3D) измерительные зонды остаются неподвижными. В этом случае угол разброса является общим для каждого основного направления прибытия,
- посредством механической ориентации зонда в плоскости возвышения (2D), в азимутальной плоскости (2D) или при комбинации обоих способов (3D) испытываемый объект остается неподвижным. В этом случае угол разброса является общим для каждого основного направления прибытия.
В соответствии с вариантом осуществления изобретения, показанным на фиг.10, обеспечивается система 7 индивидуального регулирования механического выравнивания зондов 2 относительно измерительной точки 40. Эта система 7 регулирования выравнивания содержит, например, средство 70 электропривода зонда 2 на его опорной конструкции, соответствующее по меньшей мере одной степени свободы, отличной от той, которая соответствует целевому направлению DP зонда 2 в направлении измерительной точки 40 и, например, в соответствии по меньшей мере с двумя направлениями каждого зонда 2, которые перпендикулярны или пересекаются относительно целевого направления DP зонда в направлении измерительной точки 40. Например, также обеспечивается автоматическое устройство 72 выравнивания, основанное, например, на оптической камере 71, такой как, например, камера на приборах с зарядовой связью (типа CCD). Во время этапа установки измерительной системы или даже этапа подготовки к выполнению измерений электромагнитных излучений, оптическую камеру 71 располагают, например, точно в измерительной точке 40, закрепляя ее на опорной мачте 4 и ориентируя ее последовательно в направлении каждого зонда 2, чтобы управлять соответствующим позиционированием и соответствующим выравниванием зонда 2 с помощью изображения, получаемого камерой 71, причем зонд 2 формирует идентифицируемую трассу CR, например, в форме крестиков, на полученном камерой изображении. Как показано на фиг.10, система 7 содержит блок 70 электропривода для электропривода зонда 2 на опорной конструкции 3 в соответствии с тремя измерениями в пространстве, чтобы затем перемещать зонд 2 в соответствии с этими тремя измерениями относительно конструкции 3, при поступательном движении и/или при вращении. Многоосевой контроллер 73 приводит в действие блок 70 электропривода в соответствии с его степенями свободы. Камера 71 прикрепляется к модулю 74 для анализа изображения, подаваемого для обнаружения в этом изображении трассы CR зонда 2, в котором изображение камеры 71 также может отображаться, например, на экране 75 управления. Модуль 74 для анализа изображения соединяется с модулем 76 управления, который, в свою очередь, управляет многоосевым контроллером 73, чтобы осуществлять управление обратной связью в положениях, где трасса, оставленная зондом 2 в изображении камеры 71 на заданной трассе TRC установочных точек, соответствует должному выравниванию целевого направления DP на измерительную точку 40, причем эта трасса TRC является целью программного обеспечения. Модуль 76 поэтому программируется так, чтобы зонд 2 перемещался относительно его опорной конструкции 3 посредством контроллера 73 и блока 73 электропривода, так чтобы реальная трасса CR зонда совпадала с трассой TRC из установочных точек. Модуль 76 соединяется с интерфейсом 77 для программирования пользователем и с устройством 78 памяти для экономии на трассах и/или регулировках, проводимых для каждого зонда 2. Зонд затем удерживается блоком 70 электропривода в положении выравнивания на измерительной точке 40.
Это гарантирует, что каждый зонд 2 правильно выровнен на одной и той же измерительной точке для последующих измерений, которые могут делаться зондом 2 и, в частности, например, для последующего создания углов разброса вокруг каждого основного направления прибытия D.
Оптическая камера может, например, также быть соединена с лазерным прицелом зондов.
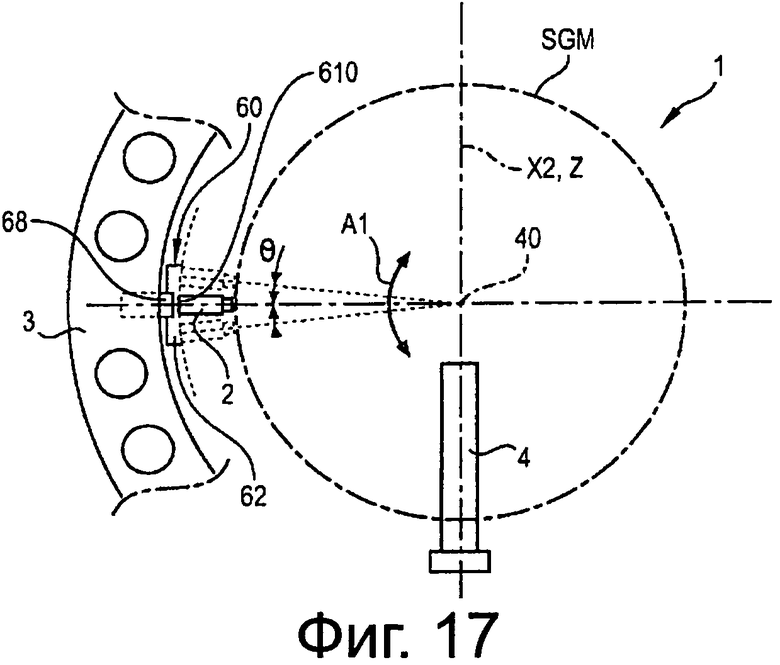
В соответствии с вариантом осуществления изобретением, показанным на фиг.17 и 18, устройство 6, 60 механического перемещения для выполнения угла разброса относительно основного направления D наведения обеспечивается между зондом 2 и опорной конструкцией 3 зонда 2. Это устройство 6, 60 механического перемещения позволяет перемещать зонд 2 относительно опорной конструкции 3 в соответствии по меньшей мере с одной степенью свободы и, например, в соответствии с двумя степенями свободы, как пример, в соответствии по меньшей мере с одним угловым перемещением вокруг геометрической оси, проходящей через измерительную точку 40, чтобы позволить содержать, например, угловое перемещение A1 в первой негоризонтальной плоскости и, например, в вертикальной плоскости (при угле возвышения 0, как показано на фиг.17), проходящей через измерительную точку 40, и/или другое угловое перемещение A3 в другой горизонтальной плоскости (на угол Ф по азимуту, как показано на фиг.18), проходящей через измерительную точку 40 и пересекающей первую плоскость.
Устройство 6 механического перемещения является, например, двойным механизмом гониометрического типа, расположенным вокруг двух секущих осей X1, X2, и, например, ортогональным.
В варианте осуществления, показанном на фиг.17 и 18, устройство 6 механического перемещения содержит первую систему 60 относительного углового перемещения для зонда 2 относительно опорной конструкции 3 соответственно на первый угол A1. Эта первая система 60 углового перемещения содержит, например, рельс 62 для направления в соответствии с дугой окружности, центрующий в измерительной точке 40 в первой плоскости элемент 610 привода, поддерживающий зонд 2. Элемент 610 может перемещаться по углу соответственно на первый угол A1 по рельсу 62, причем обеспечивается средство привода, содержащее, например, средство электропривода, чтобы перемещать элемент 610 по направляющему рельсу 62.
Устройство 6 механического перемещения содержит вторую систему 68 относительного углового перемещения зонда 2 относительно опорной конструкции 3 соответственно на второй угол A3. Эта вторая система 68 углового перемещения содержит, например, неподвижный рельс 682 для направления в соответствии с дугой окружности, центрующий в измерительной точке 40 во второй плоскости элемент 618 привода, поддерживающий рельс 62. Элемент 618 может перемещаться по углу соответственно на первый угол A1 по рельсу 682, причем обеспечивается средство привода, содержащее, например, средство электропривода, чтобы перемещать элемент 618 по направляющему рельсу 682.
Первая система 60 относительного углового перемещения и вторая система 68 относительного углового перемещения соответственно перемещают зонд вокруг двух секущих геометрических осей X1 и x2, проходящих через измерительную точку 40, которые являются, например, ортогональными и эквивалентными, соответственно, горизонтальной оси и вертикальной оси Z. Поэтому зонд может двигаться по геометрической измерительной сфере SGM относительно измерительной точки 40 и к расположенному там испытываемому объекту.
Конечно, вместо показанного на фиг.17 и 18, рельс 62, который может перемещаться, соответственно, на угол A3 по рельсу 682, прикрепленному к опорной конструкции 3, может быть рельсом 682, который может перемещаться, соответственно, на угол A1 по рельсу 62, прикрепленному к опорной конструкции 3.
Опорная конструкция 3 может быть одной из конструкций 3, 103, 203, описанных здесь ранее.
На фиг.17 и 18 привод 701 на опорной конструкции 3 создает угловые перемещения A1 и A3 устройства 6 под управлением модуля 760 управления, управляющего приводом 701 по углам θ и Ф.
Модуль 760 соединяется с программируемым интерфейсом 770 для программирования пользователем и с записываемой памятью 780 для записи позиций РСОМ управления зонда 2.
Теперь здесь ниже описывается рабочий режим, действительный для вариантов осуществления, описанных здесь ранее. Вычислительное устройство, например, компьютер, который показан как модуль 760 управления, обеспечивается для управления двигателем или двигателями 620, 613, 64, 701 устройства механического перемещения или устройствами 6, 60, 601, 63, 68 для перемещения зонда или зондов 2 в соответствии со статистикой угла разброса. Эта статистика угла разброса выбирается заранее пользователем на интерфейсе 770 компьютера. Когда все параметры статистики угла разброса выбраны, эти параметры, случайным образом определяющие угол разброса, записываются в память 780 компьютера. Компьютер вычисляет различные угловые положения, которые могут заниматься зондом относительно основного направления D наведения с вероятностью каждого углового положения, вычисленной согласно выбранной статистике. Компьютер затем производит выбор из числа угловых позиций, записанных в памяти, и делает это случайным образом, обращаясь к выбранной статистике угла разброса, чтобы найти успешные позиции управления РСОМ для управления двигателем или двигателями для последующих моментов. Последующие позиции управления PCOM записаны в памяти вместе с моментами их появления. По меньшей мере один двигатель 620, 613, 64, 701 удовлетворяет последовательным позициям управления PCOM, которую он принимает от компьютера 760, чтобы занять реальные последовательные позиции управления PCOM в последующие моменты, причем каждая из этих реальных позиций соответствует, следовательно, реальному случайному углу по меньшей мере одного зонда 2 относительно его направления D наведения и, например, в двух или трех измерениях. С каждой позицией управления PCOM для управления реальным углом по меньшей мере одного зонда 2 относительно его направления D наведения связывается амплитуда (или модуль) управления и/или фаза управления для управления этим зондом 2, причем для каждого зонда, передающего электромагнитное излучение, его амплитуда и/или фаза соответствует этой амплитуде управления и/или фазе управления. Эта амплитуда управления и/или фаза управления обычно называются управляющим сигналом S для управления по меньшей мере одним зондом 2, который вычисляется компьютером для выбранной статистики угла разброса. На деле, например, для статистики угла разброса гауссова типа амплитуда излучения зонда 2 уменьшается, когда его реальный угол относительно его направления D наведения увеличивается. Поэтому предусматривается, что для формирования с помощью компьютера по меньшей мере для одного зонда 2 в связи с движением, представляющим статистику угла разброса относительно направления наведения D, переменного управляющего сигнала S для управления излучением от этого зонда 2, обеспечивается вычислительное средство для этого управляющего сигнала S как функции статистики угла разброса. Средства радиочастотного измерения и сбора данных обеспечиваются для измерения реакции испытываемого объекта на излучение зонда или зондов.
На фиг.19 представлен пример управляемых угловых перемещений PCOM зонда 2 в соответствии со статистикой, определяемой компьютером 760 как функцией времени t, выраженной в секундах (с). Эта статистика математически определяется компьютером. Это угловое перемещение может быть, например, для угла θ или Ф, которые могут быть равными или различными. Угловые перемещения PCOM могут выполняться вокруг основного направления D наведения, образуя начало координат оси ординат. Управляемые угловые перемещения РСОМ являются реальными углами, получаемыми последовательно во времени зондом 2 вокруг основного направления D наведения. Последовательные реальные угловые перемещения PCOM устанавливаются последовательными позициями управления PCOM, установленными и определенными компьютером 70. Например, угловые перемещения РСОМ, показанные на фиг.19, имеют максимальный разброс ±20° вокруг основного направления наведения D. Это цифровой пример реального угла наведения PCOM зонда 2 как функции времени после случайного выбора, выполненного компьютером 760 для максимального угла разброса ±20 градусов вокруг основного направления D. Между последовательными реальными угловыми перемещениями PCOM существует, например, один и тот же регулярный временной интервал. Таким образом, устройство, соответствующее изобретению, формирует электромагнитные сценарии угла разброса, представляющие реальные условия работы испытываемого оборудования. Зонды 2 позволяют посылать или принимать электромагнитное излучение, определенное заранее, в направлении испытываемого объекта или от испытываемого объекта, помещенного в измерительной точке 40, чтобы определить характеристики реакции объекта на посланное электромагнитное излучение. Конечно, возможно посылать различные электромагнитные излучения, но определенные заранее по законам, вычисленным компьютером, чтобы моделировать трехмерные электромагнитные среды. Таким образом, объекты, которые могут испытываться в измерительной точке 40, могут быть так называемыми "пассивными" испытываемыми объектами, содержащими одну или более антенн, питаемых кабелями, или же могут быть так называемыми "активными "испытываемыми объектами или даже "беспроводными" объектами, которые являются испытываемыми объектами, имеющими свою собственную батарею питания, свою собственную интегрированную приемную и/или передающую систему и свой собственный протокол связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО ИСПЫТАНИЯ ОБЪЕКТА | 2011 |
|
RU2582892C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2000 |
|
RU2187137C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2137167C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО С СИММЕТРИЧНОЙ МОНТИРОВКОЙ | 2001 |
|
RU2213363C2 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ КОНТРРЕФЛЕКТОРА ЗЕРКАЛЬНОЙ АНТЕННЫ | 1996 |
|
RU2099829C1 |
| Ультразвуковой прибор неразрушающего контроля гибридного типа | 2022 |
|
RU2824537C2 |
| СПОСОБ ОБНАРУЖЕНИЯ В ПРИРОДЕ ПРЕДПОЛАГАЕМОГО СВЕТОНОСНОГО ЭФИРА | 1992 |
|
RU2049312C1 |
| СПОСОБ НАВЕДЕНИЯ И УСТРОЙСТВО, ПРЕДПОЛАГАЮЩЕЕ ЕГО РЕАЛИЗАЦИЮ | 2017 |
|
RU2683966C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ ВОКРУГ ОБЪЕКТА | 1991 |
|
RU2014624C1 |
| Определение и калибровка длины иглы для системы наведения иглы | 2012 |
|
RU2609203C2 |















Изобретение относится к радиотехнике, в частности к средству электромагнитного испытания объекта. Стенд содержит зонды, безэховые электромагнитные поглотители, опорную конструкцию, систему перемещения, привод устройства механического перемещения, компьютер, интерфейс пользователя, датчик угла положения опоры, контур обратной связи, опорные ролики, а также вторую систему углового перемещения. Опорная конструкция имеет вид дуги или кольца и выполнена таким образом, что опирающиеся на неё зонды распределены в трех измерениях. При этом зонд и опора для объекта контроля перемещаются относительно друг друга в соответствии с траекторией, рассчитываемой на основе заданной статистики углового разброса относительно основного направления наведения зонда. Компьютер выполнен с возможностью ввода статистики углового разброса пользователем, вычисления множества угловых контрольных позиций для управления приводом механического перемещения, а также расчета значений интенсивности и фазы электромагнитного излучения. При этом заданная статистика углового разброса является двойным экспоненциальным законом. Технический результат - расширение функциональных возможностей стенда. 2 н. и 25 з.п. ф-лы, 19 ил. 
1. Способ электромагнитного испытания по меньшей мере одного объекта, содержащий этап, на котором посылают электромагнитное излучение посредством по меньшей мере одного зонда (2) в направлении заданной испытательной точки (40), в которой расположен испытываемый объект (ОТ),
при этом перемещают указанный по меньшей мере один зонд (2) и опору (4) для испытываемого объекта (ОТ) относительно друг друга управляемым образом посредством устройства (6, 60, 63, 601, 68) механического перемещения в соответствии с траекторией, вычисляемой на основе заданной статистики углового разброса направления электромагнитного излучения относительно заданного основного направления (D) наведения зонда (2) в направлении заданной испытательной точки (40), для формирования посредством указанного по меньшей мере одного зонда (2) электромагнитного излучения, имеющего указанную заданную статистику углового разброса относительно заданного основного направления (D) наведения,
причем используют по меньшей мере один компьютер (760), содержащий интерфейс (770), позволяющий пользователю выбирать упомянутую статистику углового разброса,
при этом компьютер (760) вычисляет множество последовательных угловых контрольных положений (РСОМ) для управления устройством (6, 60, 601, 63, 68) механического перемещения относительно заданного основного направления (D) наведения, которые представляются в соответствии с упомянутой выбранной статистикой угла разброса, и
компьютер посылает вычисленные последовательные угловые контрольные положения по меньшей мере на один двигатель (620, 613, 64, 701) устройства (6, 60, 601, 63, 68) механического перемещения, так чтобы упомянутый по меньшей мере один зонд (2, 102, 202) занимал определенные фактические последовательные положения, соответствующие последовательным контрольным положениям (РСОМ).
2. Способ по п. 1, отличающийся тем, что осуществляют упомянутое перемещение в плоскости.
3. Способ по п. 1, отличающийся тем, что осуществляют упомянутое перемещение в вертикальной плоскости для формирования заданной статистики углового разброса по возвышению посредством устройства перемещения (6, 60, 63, 601, 68).
4. Способ по п. 1, отличающийся тем, что осуществляют упомянутое перемещение в горизонтальной плоскости для формирования заданной статистики углового разброса по азимуту посредством устройства перемещения (6, 60, 63, 601, 68).
5. Способ по п. 1, отличающийся тем, что упомянутое перемещение является трехмерным для формирования заданной статистики углового разброса по возвышению и по азимуту посредством устройства перемещения (6, 60, 63, 601, 68).
6. Способ по п. 1, отличающийся тем, что устройство (6) механического перемещения расположено между упомянутым по меньшей мере одним зондом (2) и опорной конструкцией (3) для поддержки упомянутого по меньшей мере одного зонда (2).
7. Способ по п. 6, отличающийся тем, что устройство (6) механического перемещения содержит по меньшей мере одно устройство (62, 68) углового перемещения зонда (2) для вращения вокруг испытательной точки (40) в соответствии по меньшей мере с одной степенью свободы относительно опорной конструкции (3).
8. Способ по п. 1, отличающийся тем, что упомянутый по меньшей мере один зонд (2, 102, 202) является одним или более зондом в сети из множества зондов (2, 102, 202), поддерживаемых опорной конструкцией (3, 103, 203), причем каждый зонд (2, 102, 202) имеет отдельное основное направление (D) наведения в направлении испытательной точки (40).
9. Способ по п. 8, отличающийся тем, что закрепляют испытываемый объект (ОТ) на опоре (4), при этом устройство (6, 60, 63, 601, 68) механического перемещения выполняет заданное перемещение опорной конструкции (3, 103, 203) для поддержки зондов (2, 102, 202) и опоры (4) для испытываемого объекта (ОТ) относительно друг друга, с тем чтобы упомянутый по меньшей мере один зонд (2, 102, 202) выполнял перемещение, представляющее заданную статистику углового разброса относительно его основного направления (D) наведения.
10. Способ по п. 8, отличающийся тем, что закрепляют испытываемый объект (ОТ) на опоре (4), при этом устройство (6, 60, 63, 601, 68) механического перемещения выполняет заданное перемещение опорной конструкции (3, 103, 203) для поддержки зондов (2, 102, 202) относительно неподвижной опоры (4) испытываемого объекта (ОТ), с тем чтобы упомянутый по меньшей мере один зонд (2, 102, 202) выполнял перемещение, представляющее заданную статистику углового разброса относительно его основного направления (D) наведения.
11. Способ по п. 8, отличающийся тем, что закрепляют испытываемый объект (ОТ) на опоре (4), при этом устройство (6, 60, 63, 601, 68) механического перемещения выполняет заданное перемещение опоры (4) испытываемого объекта (ОТ) относительно неподвижной опорной конструкции (3, 103, 203) для поддержки зондов (2, 102, 202), с тем
чтобы упомянутый по меньшей мере один зонд (2, 102, 202) выполнял перемещение, представляющее заданную статистику углового разброса относительно его основного направления (D) наведения.
12. Способ по п. 6, отличающийся тем, что опорная конструкция (103, 203) имеет вид дуги или кольца, на которое опираются зонды (2, 102, 202), расположенные в плоскости.
13. Способ по п. 6, отличающийся тем, что опорная конструкция (3) является трехмерной и имеет такой вид, что опирающиеся зонды (2) распределены в трех измерениях.
14. Способ по п. 6, отличающийся тем, что устройство (6, 60, 63, 601) механического перемещения обеспечивает по меньшей мере одно заданное угловое скользящее перемещение (А1) опорной конструкции (3) и опоры (4) испытываемого объекта (ОТ) относительно друг друга по меньшей мере вокруг невертикальной геометрической оси.
15. Способ по п. 6, отличающийся тем, что устройство (6, 60, 63, 601) механического перемещения обеспечивает второе угловое вращательное перемещение опорной конструкции (3) и опоры (4) испытываемого объекта (ОТ) относительно друг друга по меньшей мере вокруг вертикальной геометрической оси.
16. Способ по п. 14 или 15, отличающийся тем, что опорная конструкция (3) покоится на нижнем основании (61), при этом между основанием (61) и опорной конструкцией (3) обеспечивается вторая система (63) углового перемещения для перемещения опорной конструкции (3) относительно основания (61) на второй угол (А2) с тем же самым абсолютным значением противоположно скользящему угловому перемещению (А1) первого устройства (60) углового перемещения опоры (4) относительно опорной конструкции (3), так что опора (4) испытываемого объекта остается в заданном и, по существу, постоянном положении относительно вертикали, причем устройство (6) механического перемещения для перемещения опоры (4) относительно опорной конструкции (3) называется первой системой (6) относительного перемещения.
17. Способ по п. 16, отличающийся тем, что вторая система (63) углового перемещения содержит множество опорных роликов (631) для поддержки внешней изогнутой поверхности (310) стенки (31) опорной конструкции на основании (61) и по меньшей мере один приводной двигатель (64) для привода по меньшей мере одного из роликов (631) для поворота упомянутой внешней изогнутой поверхности (310) стенки (31) опорной конструкции (3) относительно основания (61) на упомянутый второй угол (А2).
18. Способ по п. 17, отличающийся тем, что дополнительно обеспечивают:
элемент управления для управления скользящим угловым перемещением (А1) первой системы (6) относительного перемещения,
по меньшей мере один измерительный датчик (66) для измерения фактического угла положения опоры (4) для испытываемого объекта относительно вертикали,
контур (65) обратной связи для управления приводным двигателем (64) в зависимости от угла, измеряемого датчиком (66), так чтобы угол, измеряемый датчиком (65), был равен постоянному значению, соответствующему упомянутому заданному положению опоры (4) относительно вертикали.
19. Способ по п. 1, отличающийся тем, что множество зондов (2) равноугольно распределены по меньшей мере по одной сферической координате вокруг одной и той же измерительной точки (40) зондов (2).
20. Способ по п. 1, отличающийся тем, что по меньшей мере на одном зонде обеспечена система (7) индивидуального регулирования для регулирования механического выравнивания зонда (2) относительно измерительной точки (40), причем измерительная точка (40) является точкой на опоре (4), в которой подлежит центровке испытываемый объект.
21. Способ по п. 20, отличающийся тем, что система (7) индивидуального регулирования для регулирования механического выравнивания зонда (2) связана по меньшей мере с одной камерой (71) оптического обнаружения, расположенной в измерительной точке (40), для измерения механического выравнивания зонда (2).
22. Способ по п. 20 или 21, отличающийся тем, что система (7) индивидуального регулирования для регулирования механического выравнивания зонда (2) содержит средство (70) привода упомянутого зонда (2) на опорной конструкции (3) для смещения зонда (2) относительно опорной конструкции (3) в соответствии по меньшей мере с одной степенью свободы, отличной от основного направления наведения (DP) зонда (2) в направлении измерительной точки.
23. Способ по п. 21, отличающийся тем, что система (7) индивидуального регулирования для регулирования механического выравнивания зонда (2) содержит средство (70) привода упомянутого зонда (2) на опорной конструкции (3) для смещения зонда (2) относительно опорной конструкции (3) в соответствии по меньшей мере с одной степенью свободы, отличной от основного направления наведения (DP) зонда (2) в направлении измерительной точки,
при этом обеспечивают модуль (74) анализа изображения, предоставляемого камерой, для обнаружения в упомянутом изображении траектории (CR) упомянутого зонда (2), и обеспечивают модуль (76) обратной связи для управления средством (70) привода для выравнивания обнаруженной траектории (CR) зонда с установленной траекторией (TRC), соответствующей выравниванию зонда (2) на измерительной точке (40).
24. Способ по п. 1, отличающийся тем, что заданная статистика угла разброса является двойным экспоненциальным законом.
25. Способ по п. 1, отличающийся тем, что заданная статистика угла разброса является гауссовой, центрованной относительно основного направления (D) наведения и имеющей угловой разброс, определяемый углом раскрыва, центрованным вокруг основного направления (D) наведения, в котором передается половина максимальной энергии излучения.
26. Способ по п. 1, отличающийся тем, что компьютер вычисляет для каждого углового контрольного положения (РСОМ) управляющий сигнал (S) для управления интенсивностью и/или фазой электромагнитного излучения от упомянутого по меньшей мере одного зонда (2, 102, 202).
27. Устройство для электромагнитного испытания по меньшей мере одного объекта (ОТ) для выполнения способа испытания по любому из пп. 1-26, содержащее по меньшей мере один зонд (2, 102, 202) для излучения электромагнитного излучения в направлении заданной испытательной точки (40), в которой расположен испытываемый объект (ОТ), а также опору (4) для испытываемого объекта,
при этом испытательное устройство дополнительно содержит устройство (6, 60, 63, 601, 68) механического перемещения для механического перемещения упомянутого по меньшей мере одного зонда (2, 102, 202) и опоры (4) для испытываемого объекта относительно друг друга управляемым образом в соответствии с траекторией, вычисляемой на основе заданной статистики углового разброса направления электромагнитного излучения относительно заданного основного направления (D) наведения зонда (2) в направлении измеряемой точки (40), чтобы посредством по меньшей мере одного зонда создавать электромагнитное излучение, имеющее упомянутую заданную статистику углового разброса относительно заданного основного направления (D) наведения,
причем испытательное устройство содержит по меньшей мере один компьютер (760) содержит интерфейс (770), позволяющий пользователю выбирать упомянутую статистику углового разброса,
при этом компьютер (760) выполнен с возможностью вычисления множества последовательных угловых контрольных положений (РСОМ) для управления устройством (6, 60, 601, 63, 68) механического перемещения относительно заданного основного направления (D) наведения, которые представляются в соответствии с упомянутой выбранной статистикой угла разброса, и
отправки вычисленных последовательных угловых контрольных положений по меньшей мере на один двигатель (620, 613, 64, 701) устройства (6, 60, 601, 63, 68) механического перемещения, так чтобы упомянутый по меньшей мере один зонд (2, 102, 202) занимал определенные фактические последовательные положения, соответствующие последовательным контрольным положениям (РСОМ).
| US4661820 A, 28.04.1987 | |||
| JP 2001004738 A, 12.01.2001 | |||
| брошюра SATIMO Antenna Measurement Slab | |||
| SATIMO, 08.2008 | |||
| WO 2010006891 A1, 21.01.2010 | |||
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ ВОКРУГ ОБЪЕКТА | 1991 |
|
RU2014624C1 |

