Изобретение относится к устройству для электромагнитного испытания по меньшей мере одного объекта, например, такого как излучающий объект.
Примерами таких испытываемых объектов, которые можно перечислить, являются одна или более антенн, питаемых кабелями или же соединенных непосредственно с их источниками или же с их интегрированными приемниками, и способных работать на передачу и/или прием.
Целью является, например, получение знания реакции антенны и интегрированного приемника мобильного телефона на внешние электромагнитные излучения.
Или, целью является, например, получение знания реакции антенны GPS с ее внешним приемником на внешние электромагнитные помехи.
Или, целью является, например, измерение диаграммы направленности радиолокационной антенны в нескольких направлениях пространства.
Или, целью является, например, измерение чувствительности мобильного телефона в нескольких направлениях пространства.
Известен такой тип устройства для электромагнитного испытания по меньшей мере одного излучающего объекта, который содержит сеть электромагнитных зондов для передачи и/или приема электромагнитных излучений в направлении испытываемого объекта или от него, причем устройство также содержит опорную конструкцию для поддержки сети зондов и поддержки испытываемого устройства.
Например, документ WO 2010/006891 описывает сеть электромагнитных зондов, распределенных по сфере с мачтой для поддержки испытываемого объекта, проходящую от места расположения устройства до почти геометрического центра сферы.
На предшествующем уровне техники существуют также сети зондов на арках, кольцах или на одной плоскости, такие как, например, описаны в документе "Spherical Near Field Facility for Characterizing Random Emissions", авторы Benoît Fourestié, Jean-Charles Bolomey, Thierry Sarrebourse, Zwi Altman, Joe Wiart, в in IEEE Transactions on Antennas and Propagation, том 53, №8, август 2005 г.
Эти устройства располагают в безэховой камере для предотвращения паразитных отражений излучения и фарадизуют для освобождения от внешних электромагнитных возбуждений.
Одним из недостатков этих известных устройств, помещенных в фарадизированную безэховую камеру, является часто значительный размер камер, которые требуют строительства больших зданий и использования больших количеств электромагнитных поглотителей для покрытия больших внутренних поверхностей, что создает значительные затраты и требует времени на изготовление.
Другой недостаток состоит в том, что фарадизированная безэховая камера часто устанавливается организацией, отличной от той, которая устанавливает измерительную систему внутри камеры, что составляет дополнительный риск для проектов, как с организационной точки зрения, так и с точки зрения планирования, а также с точки зрения окончательной ответственности за характеристики измерений готового измерительного средства.
Другим недостатком является то, что качество электромагнитных измерений непосредственно связано со способностью фарадизированной безэховой камеры ограничивать внутренние отражения и внешние возмущения, требуя как высококачественных электромагнитных поглотителей, так и хорошего электромагнитного экранирования, что может стоить дорого.
Другим недостатком является то, что присутствие оборудования или участков механической поддержки, отражающих или рассеивающих электромагнитные волны вблизи измерительных зондов, может ухудшать качество измерений.
Задача изобретения состоит в получении устройства для электромагнитного испытания, свободного от недостатков, присущих предшествующему уровню техники.
С этой целью изобретение относится к устройству для электромагнитного испытания по меньшей мере одного объекта, устройству, содержащему сеть электромагнитных зондов для передачи и/или приема электромагнитных излучений в направлении испытываемого объекта или от него, причем устройство также содержит опорную конструкцию для поддержки сети зондов, содержащеую безэховые электромагнитные поглотители, и опору для поддержки испытываемого устройства,
отличающемуся тем, что
опорная конструкция для поддержки сети зондов заключена в трехмерном пространстве, полностью окружая опору для поддержки испытываемого объекта посредством по меньшей мере одной проводящей стенки, образующей клетку Фарадея, которая на ее внутренней стороне выстлана безэховыми электромагнитными поглотителями, расположенными с определенными интервалами между зондами.
Испытательное устройство, соответствующее изобретению, имеет интегрированную "фарадизацию", что означает, что вместо наличия фарадизированной камеры, которая изолирована от измерительного средства, образованного зондами, изобретение предлагает фарадизированную камеру, составляющую неотъемлемую часть измерительного средства, со всеми преимуществами, которые имеются с точки зрения уменьшения размеров камеры, уменьшения объема требуемых работ по гражданскому строительству, уменьшения времени на установку, уменьшения количества используемых поглотителей, уменьшения затрат и мобильности.
Фактически, на существующем уровне техники измерительное средство, такое как, например, сеть зондов, описанную в документе WO 2010/006891, помещают в независимую фарадизированную и безэховую камеру.
Поэтому, вместо наличия безэховой камеры, изолированной от измерительного средства, устройство, соответствующее задачам изобретения, предлагает безэховую камеру, образующую часть измерительного средства, с электромагнитными поглотителями между зондами, и все преимущества с точки зрения уменьшения объема камеры, уменьшения поверхности, покрытой поглотителями, снижения затрат, мобильности. В частности, испытательное устройство, соответствующее изобретению, может перемещаться гораздо легче куда угодно, в том числе, за пределы традиционной безэховой камеры.
Кроме того, устройство, соответствующее изобретению, всегда предлагает одну и ту же электромагнитную среду, устанавливаемую заранее вокруг испытываемого объекта, что гарантирует постоянное качество результатов измерений.
В варианте осуществления изобретения проводящая стенка является изогнутой. В другом варианте осуществления изобретения проводящая стенка может быть граненой.
В варианте осуществления изобретения опорная конструкция имеет, в целом, сферическую форму.
В варианте осуществления изобретения опорная конструкция содержит по меньшей мере одну стойку, к которой крепят зонды, и по меньшей мере одну проводящую стенку, где безэховые электромагнитные поглотители также обеспечивают на внутренней стороне стоек с определенными интервалами между зондами.
В варианте осуществления изобретения по меньшей мере одну проводящую стенку крепят к внешней стороне по меньшей мере одной стойки посредством по меньшей мере одного радиочастотного соединения.
В варианте осуществления изобретения опорная конструкция ограничивает замкнутый объем, содержащий опору для испытываемого объекта.
В варианте осуществления изобретения замкнутый объем, ограниченный опорной конструкцией, также содержит систему относительного перемещения для относительного перемещения опоры относительно опорной конструкции в соответствии по меньшей мере с одной степенью свободы.
В варианте осуществления изобретения систему относительного перемещения, расположенную внутри опорной конструкции, образуют по меньшей мере одной системой относительного углового перемещения, позволяющей по меньшей мере одно определенное скользящее угловое перемещение опорной конструкции относительно опоры вокруг невертикальной геометрической оси.
В варианте осуществления изобретения опорная конструкция (3) сети зондов (2) содержит первую часть (3001) для поддержки первой группы зондов (2), прикрепленную на нижнем основании (3002), и вторую часть (3003) для поддержки второй группы зондов (2), способную двигаться по нижнему основанию (3002) между первым закрытым положением относительно первой части (3001), чтобы формировать клетку Фарадея, и вторым положением, сдвинутым относительно первой части (3001), чтобы создать пространство (3010) свободного прохода между первой частью (3001) и второй частью (3003).
В варианте осуществления изобретения вторая часть (3003) шарнирно вращается вокруг вертикальной оси (3004) на нижнем основании (3002) для перемещения при вращении вокруг этой вертикальной оси (3004) между первым положением и вторым положением.
В варианте осуществления изобретения устройство содержит по меньшей мере один двигатель (3019) для движения второй части (3003) относительно первой части (3001) между первым положением и вторым положением и в первом положении способно удерживать вторую часть (3003) закрытой напротив первой части (3001), чтобы сформировать клетку Фарадея.
В варианте осуществления изобретения первая часть (3001) и вторая часть (3003) содержат, соответственно, по меньшей мере один первый край (3005) и по меньшей мере один второй край (3006), которые повернуты в направлении друг друга в первом закрытом положении, причем первый край (3005) и/или второй край (3006) содержат по меньшей мере одно радиочастотное упругое соединение (3007) расположенное так, чтобы сжиматься другим упругим соединением первого края (3005) и/или второго края (3006) в первом закрытом положении.
В другом варианте осуществления изобретения система относительного перемещения, расположенная внутри опорной конструкции разрешает по меньшей мере одно относительное угловое вращательное перемещение опорной конструкции относительно опоры вокруг вертикальной геометрической оси.
В варианте осуществления изобретения опорная конструкция покоится на нижнем
основании и между основанием и опорной конструкцией обеспечивают вторую другую систему углового перемещения, позволяющую перемещать опорную конструкцию относительно основания на второй угол с тем же самым абсолютным значением и противоположно скользящему угловому перемещению первой системы относительного углового перемещения опоры относительно опорной конструкции, так что опора для испытываемого объекта остается в заданном и, по существу, постоянном положении относительно вертикали.
В варианте осуществления изобретения вторая другая система углового перемещения содержит множество опорных роликов для поддержки внешней изогнутой поверхности стенки опорной конструкции на основании и по меньшей мере один приводной двигатель для привода по меньшей мере одного из роликов, чтобы осуществлять вращение упомянутой внешней изогнутой поверхности стенки опорной конструкции относительно основания на упомянутый второй угол.
В варианте осуществления изобретения устройство также содержит:
элемент управления для управления скользящим угловым перемещением для первой системы углового перемещения,
по меньшей мере один датчик для измерения реального угла опоры для испытываемого объекта относительно вертикали,
контур обратной связи для управления приводным двигателем как функцией угла, измеряемого датчиком, так что угол, измеренный датчиком, равен постоянному значению, соответствующему упомянутому заданному положению опоры относительно вертикали.
В варианте осуществления изобретения зонды распределяют равноугольно в соответствии по меньшей мере с одной сферической координатой вокруг одной и той же измерительной точки зондов. В другом варианте осуществления изобретения зонды распределяют в соответствии с произвольными угловыми положениями посредством ручного или моторизованного средства скольжения на опорной конструкции зондов вокруг одной и той же измерительной точки зондов.
В варианте осуществления изобретения индивидуальную систему регулирования для регулирования механического выравнивания зонда относительно одной и той же измерительной точки обеспечивают по меньшей мере на одном из зондов для всех зондов, причем измерительная точка, в которой испытывают объект, должна быть центрована на опоре.
В варианте осуществления изобретения индивидуальную систему регулирования для регулирования механического выравнивания зонда связывают по меньшей мере с одной камерой оптического обнаружения, расположенной в измерительной точке, чтобы измерять механическое выравнивание зонда.
В варианте осуществления изобретения индивидуальная система регулирования для регулирования механического выравнивания зонда содержит моторизацию упомянутого зонда на опорной конструкции, чтобы перемещать зонд относительно опорной конструкции в соответствии по меньшей мере с одной степенью свободы, иначе чем в направлении нацеливания зонда в направлении измерительной точки.
В варианте осуществления изобретения обеспечивают модуль анализа для анализа изображения, полученного камерой, чтобы обнаружить в этом изображении траекторию упомянутого зонда, и обеспечивают модуль обратной связи для управления моторизацией выравнивания обнаруженной траектории зонда с траекторией из установочных точек, соответствующей выравниванию зонда на измерительной точке.
Изобретение будет более понятно из последующего описания, приведенного исключительно посредством примера, не создающего ограничений, со ссылкой на чертежи, на которых:
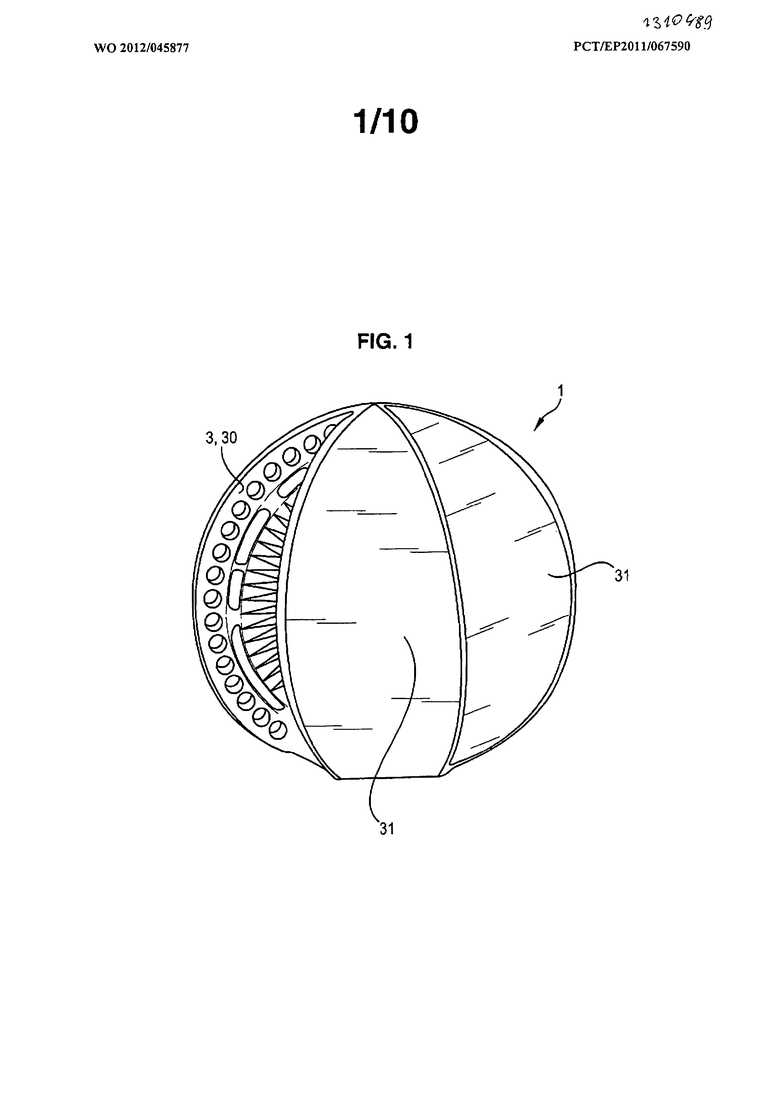
Фиг.1 - схематическое изображение вида сбоку варианта осуществления испытательного устройства в соответствии с изобретением,
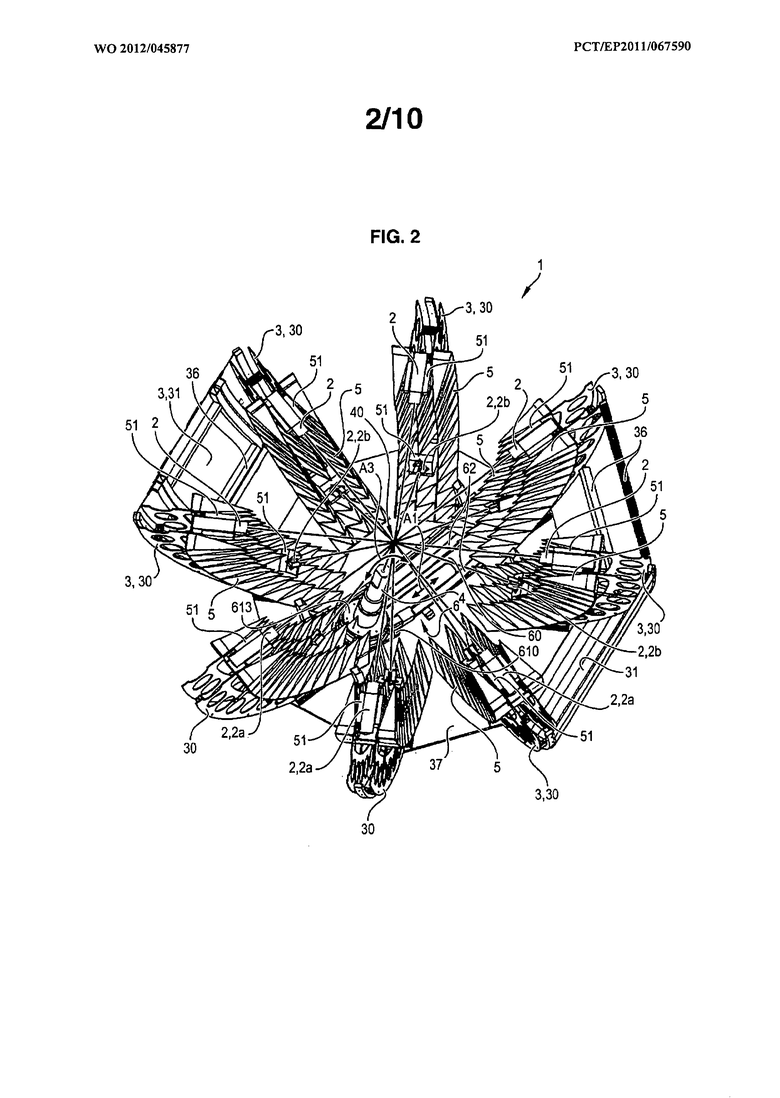
Фиг.2 - схематическое изображение вида сверху в перспективе внутренней части испытательного устройства в соответствии с вариантом осуществления изобретения,
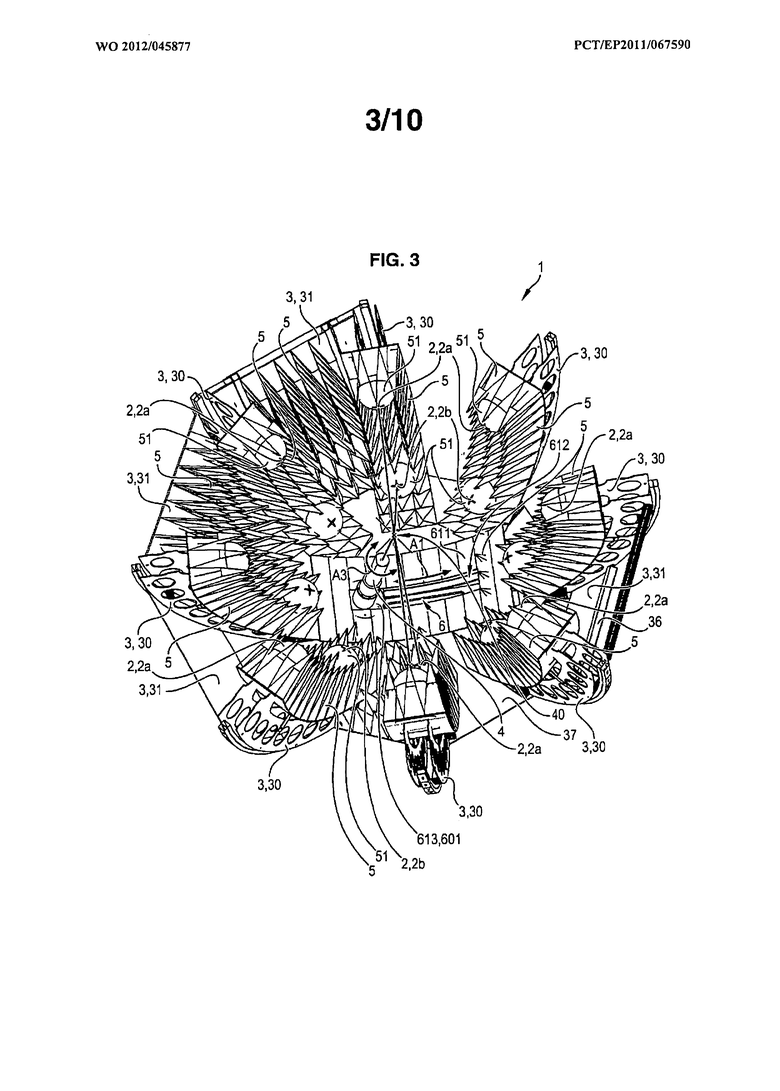
Фиг.3 - схематическое изображение другого вида сверху в перспективе внутренней части испытательного устройства в соответствии с вариантом осуществления изобретения, также показывающее нижнюю часть опорной конструкции для поддержки зондов,
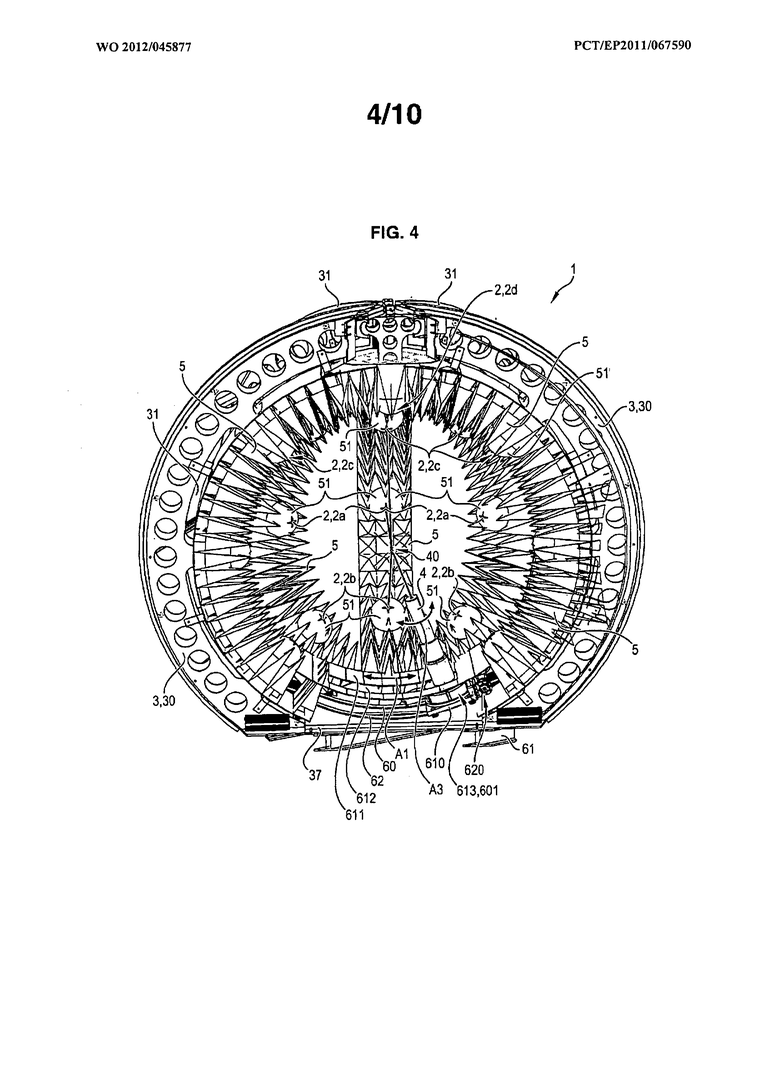
Фиг.4 - открытое фронтальное схематическое изображение испытательного устройства в соответствии с вариантом осуществления изобретения,
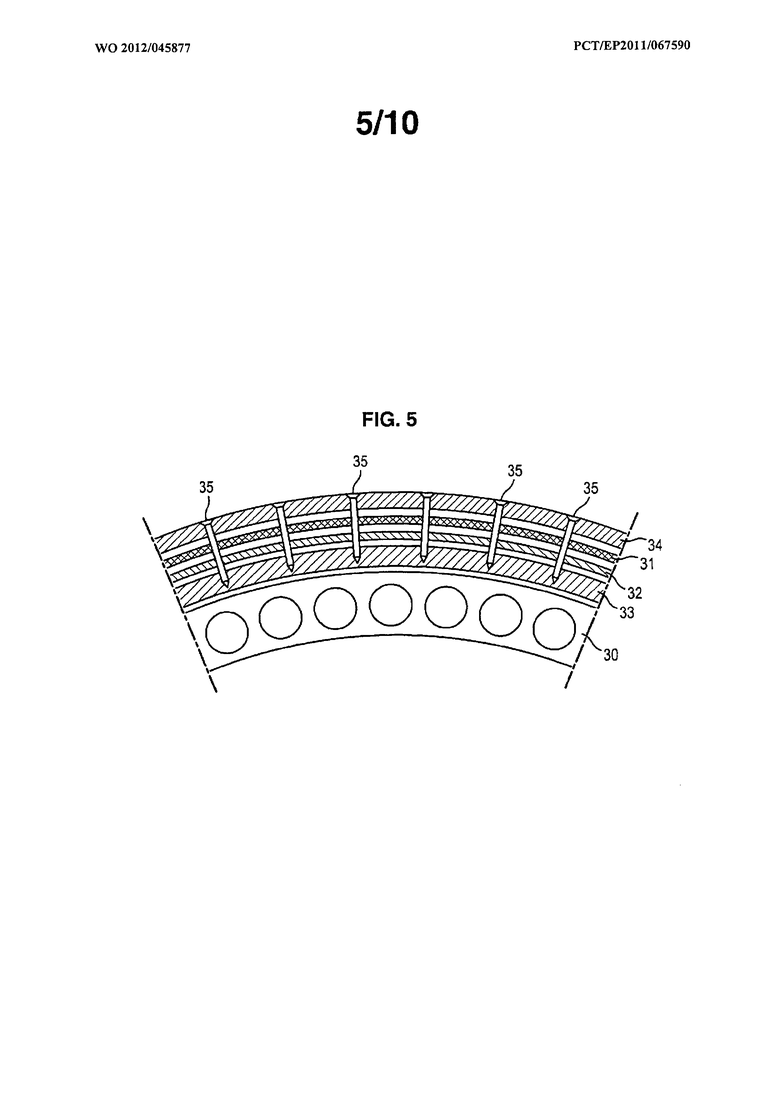
Фиг.5 - схематическое изображение вида в поперечном разрезе части устройства в соответствии с вариантом осуществления изобретения,
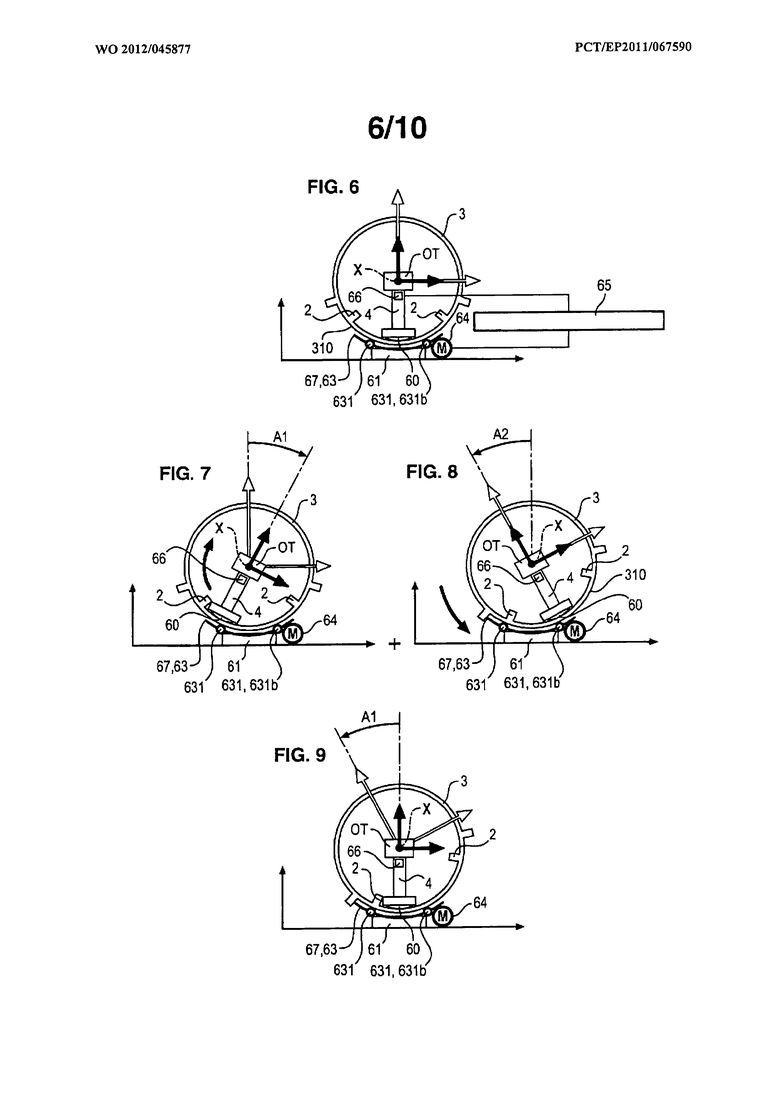
Фиг.6-9 - открытое фронтальное схематическое изображение испытательного устройства в соответствии с вариантом осуществления изобретения в различных положениях скольжения,
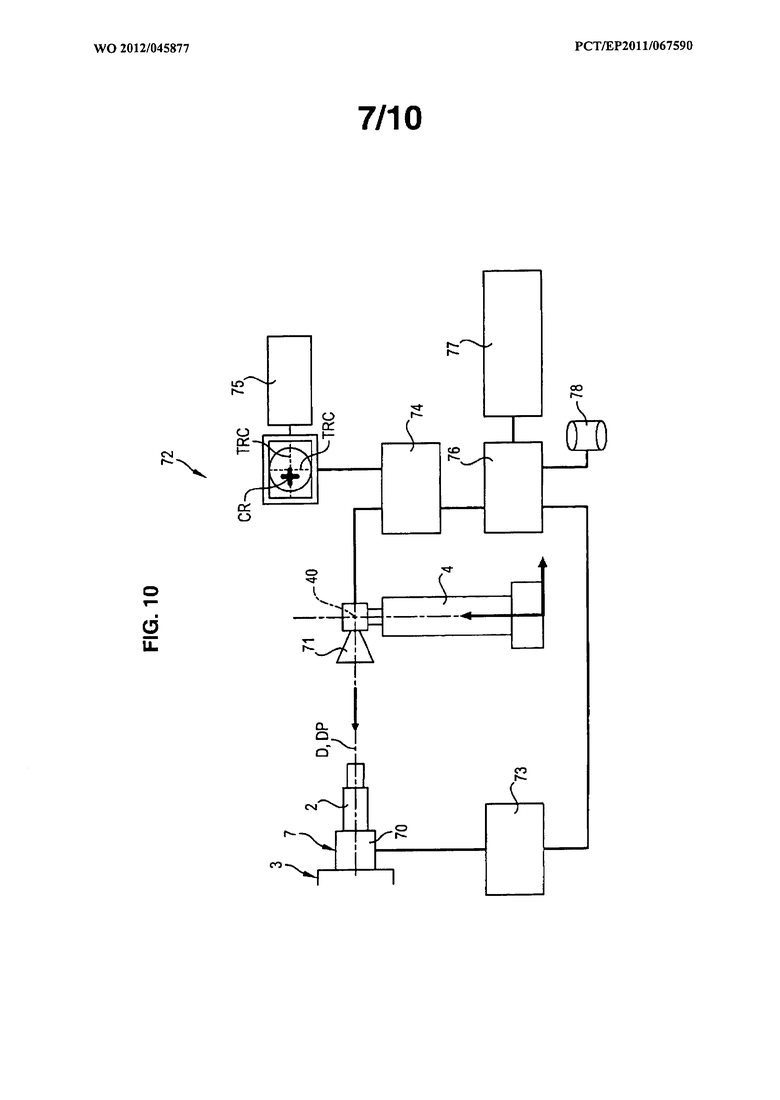
Фиг.10 - блок-схема устройства выравнивания зонда в соответствии с изобретением,
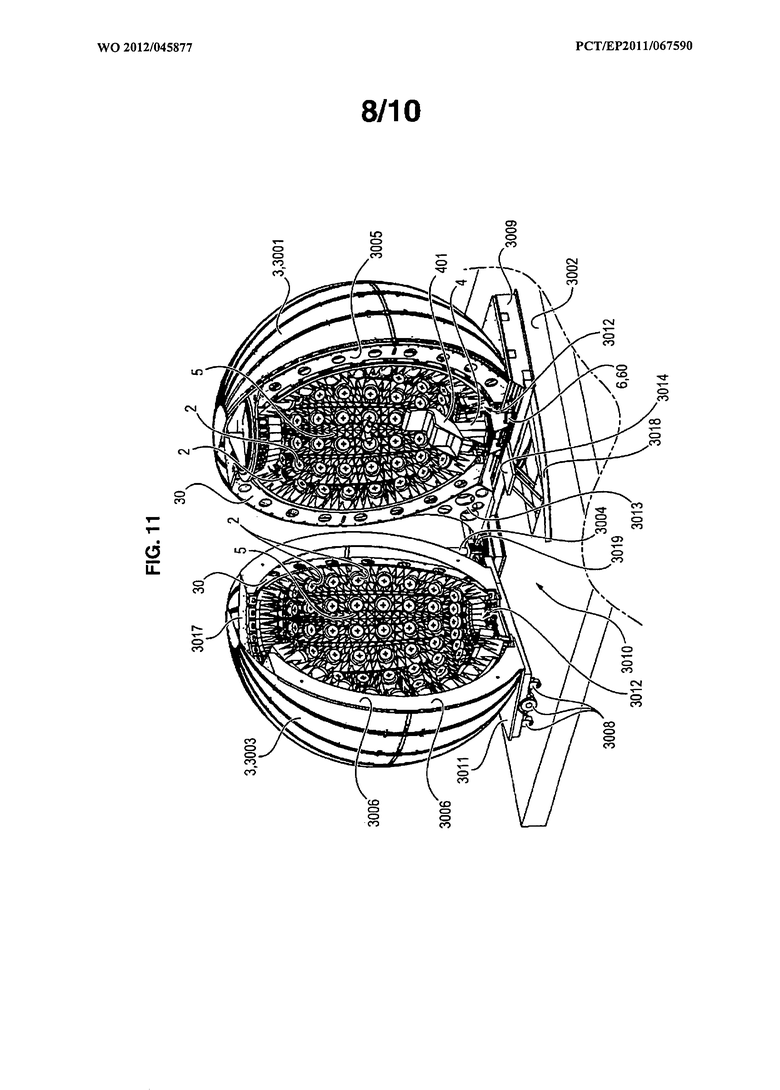
Фиг.11 - схематическое изображение в перспективе варианта осуществления изобретения в открытом положении,
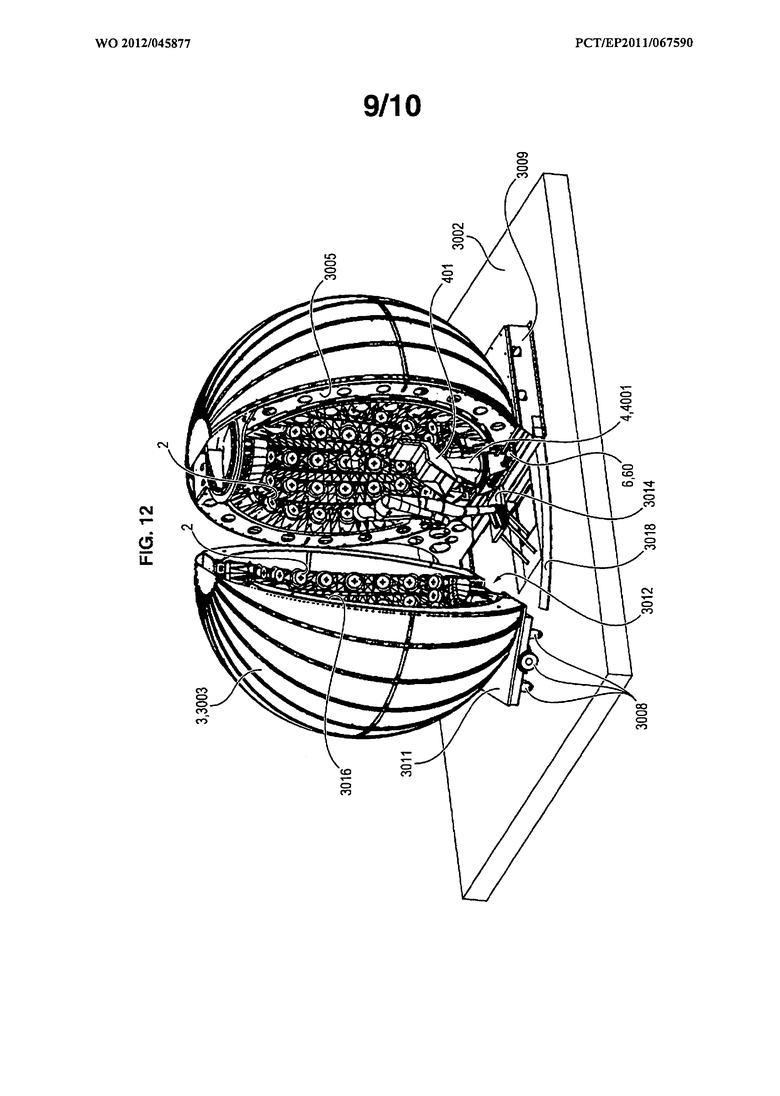
Фиг.12 - схематическое изображение в перспективе варианта осуществления, показанного на фиг.11, в положении, приближающемся к закрытому положению,
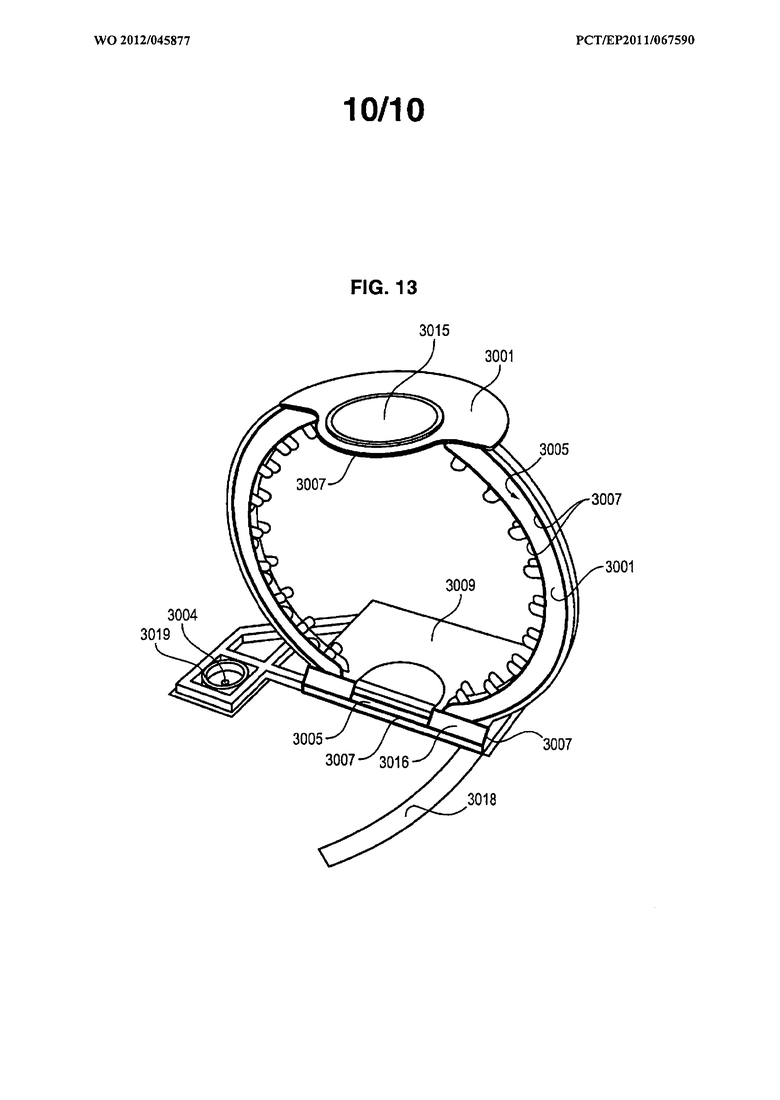
Фиг.13 - схематическое изображение в перспективе части варианта осуществления изобретения, показанного на фиг.11 и 12.
В варианте осуществления, показанном на фиг.1-9, устройство 1 для электромагнитного испытания содержит электромагнитные зонды 2, прикрепленные к опорной конструкции 3.
Для этой цели опорная конструкция 3 содержит опорные стойки 30 для поддержания зондов, причем эти стойки 30 имеют форму, например, арок, проходящих вертикально и являющихся, например, проводящими.
Устройство 1 также содержит опору 4 для одного или более испытываемых объектов, причем эта опора 4 является, например, мачтой.
Опорная конструкция 3 содержит по меньшей мере одну стенку 31, проходящую в трех измерениях пространства вокруг всей опоры 4 для испытываемого объекта, чтобы сформировать клетку Фарадея, полностью замкнутую вокруг испытываемого объекта, когда последний находится на опоре 4. Испытываемым объектом является, например, излучающий объект, как указано здесь ранее. Это предотвращает проникновение внешнего электромагнитного излучения внутрь закрытого пространства, ограниченного опорной конструкцией 3. Это также предотвращает выход из закрытого пространства, ограниченного опорной конструкцией, электромагнитных излучений, излучаемых зондами 2, и/или электромагнитных излучений, излучаемых испытываемым объектом, расположенным на опоре 4. На фиг.1-4 устройство для электромагнитного испытания показано со снятыми участками частями стенки 31 опорной конструкции, чтобы показать внутренность последней.
Стенка 31 или стенки 31 крепятся к стойкам 30, чтобы предотвратить любую электромагнитную утечку внутрь или наружу, например, посредством способа крепления, показанного на фиг.5, который будет здесь далее описан более подробно.
На внутренней стороне, повернутой в направлении испытываемого объекта и опоры 4, опорная конструкция содержит безэховые электромагнитные поглотители 5, расположенные в промежутках между зондами 2. В результате, когда стойки 30, как показано, находятся внутри относительно стенки 31, стойки 30 покрываются безэховыми электромагнитными поглотителями 5, повернутыми в направлении измерительной точки 40 зондов 2, причем эта измерительная точка 40, в целом, находится выше или вблизи опоры 4, а испытываемый объект, в целом, должен быть центрован в этой проверочной точке 40. Стенка 31 покрывается с внутренней стороны безэховыми электромагнитными поглотителями 5, повернутыми в направлении измерительной точки 40, в которой испытываемый объект на опоре 4 обычно должен быть центрован. Электромагнитные поглотители 5 должны быть, например, пирамидальными, как показано на чертеже. Некоторые из них могут быть, например, плоскими, чтобы покрывать основание 611 системы 6 относительного перемещения. Поглотители не позволяют электромагнитным излучениям, излучаемым зондами 2, и/или электромагнитным излучениям, излучаемые испытываемым объектом, достигать стенки или стенок 31 и стоек или сильно поглощаться последними, что предотвращает резкое уменьшение отражений, которые могут быть вызваны стойками 30 и стенкой или стенками 31. В действительности, стойки 30 являются, например, металлическими, в частности, изготовленными из стали или алюминия. Стенка или стенки 31 являются проводящими и изготавливаются из металла или другого проводящего материала, чтобы сформировать электрическую стенку. Каждая из них изготавливается, например, из металлического алюминиевого листа. Электромагнитные поглотители 5 располагаются по всей внутренней поверхности конструкции 3 за исключением датчиков 2, которые покрываются специальными электромагнитными поглотителями 51, например, плоской формы, как на фиг.2, или другой формы, как на фиг.3 и 4, поэтому поглотители 5 располагаются вокруг и между зондами 2, подогнанными к их специальным поглотителям 51.
Стенки 31 изогнуты, например, так, чтобы быть, например, ориентированными в направлении опоры 4. Например, обеспечивается множество стенок 31, причем каждая из стенок 31 закрепляется между двумя соседними стойками 30. Стойки 30, например, показаны на фиг.1-4 в форме полукруглых арок, проходящих вдоль меридиана сферы, чтобы придавать опорной конструкции 3, в целом, сферическую форму. Стенка или стенки 31, образующие клетку Фарадея, могут быть изогнуты, как показано на чертеже, только в вертикальном направлении, то есть, каждая из них формируется из участка цилиндра, в которого геометрическая ось горизонтальна. Стенка или стенки 31, образующие клетку Фарадея, могут также, в целом, иметь сферическую форму. Или стенка или стенки 31, образующие клетку Фарадея, могут также быть гранеными.
Кроме того, в одной из стенок 31 обеспечивается дверь, позволяющая человеку входить в конструкцию 3, чтобы приносить и/или уносить испытываемый объект, располагающийся на опоре 4. Может обеспечиваться, например, дверь "самолетного" типа, которая открывается поднятием вверх (типа двери автомобильного багажника) или опусканием вниз (типа откидного борта автомобиля) единой двери, или двухкомпонентная дверь (одна половина поднимается вверх, другая - опускается вниз). Эта дверь имеет точно изготовленный профиль, чтобы следовать изгибам конструкции 3, так чтобы она сжимала электромагнитные соединения по всему периметру двери. Эти электромагнитные соединения являются, например, соединениями ножевого типа, используемыми для фарадизации дверей измерительных камер для антенн.
В варианте осуществления, показанном на фиг.5, стенка 31 крепится на внешней стороне стойки 30. Радиочастотное соединение 32 (также называемое RF-соединением, обеспечивается между стойкой 30 и стенкой 31, чтобы гарантировать герметичность в отношении электромагнитных излучений между внутренней и внешней средами. Такие RF-соединения 32 формируются, например, металлизированной резиной, например, с плетеной металлической проволокой. Такое соединение 32 имеет возможность приспосабливаться к изогнутым или граненым формам.
Кроме того, первый проводящий металлический обод 33 крепится к внешней стороне стойки 30 и RF-соединение образуется между первым ободом 33 и стенкой 31. Второй проводящий металлический обод 34 обеспечивается на внешней стороне стенки 31, обращенной к RF-соединению 32, где стенка 31, следовательно, теперь находится между вторым ободом 34 и RF-соединением 32. Первый обод 33, RF-соединение 32, стенка 31 и второй обод 34 скрепляются друг с другом винтами 35, проходящими через них с внешней стороны. Конечно, может использоваться любое другое крепежное средство 35. Эти крепежные средства 35, придвигая второй обод 34 ближе к первому ободу 33, позволяют сжать RF-соединение 32 для обеспечения непрерывности электромагнитного экранирования, а также прикрепить стенку 31 к стойке 30.
Как показано на фиг.2 и 3, для ужесточения опорной конструкции могут также обеспечиваться поперечные элементы 36 между стойками 30 позади поглотителей 5 между последними и стенкой 31. Кроме того, принцип электромагнитной герметизации, описанный в примере, показанном на фиг.5, может быть также использован для соединения стенок 31 посредством этих поперечных элементов 36 с точки зрения электромагнитной герметизации в случае, когда стенки 31 составляются из нескольких кусков в направлении меридиана.
Круговая геометрия стоек 30 в варианте осуществления, показанном на фиг.1-5, позволяет располагать зонды 2 равномерно вокруг опоры 4 и вокруг ее измерительной точки 40 в сферической геометрии. Например, угловое азимутальное расстояние между стойками 30 в форме круговых арок является одним и тем же для всех стоек 30. Таким же образом, угловое расхождение между зондами 2, расположенными на одной и той же стойке 30, относительно горизонтальной оси, проходящей через измерительную точку 40 и перпендикулярно плоскости стойки 30, является, например, одним и тем же для всех зондов 2. Поэтому, если стойки 30 представляют меридианы сферы, то обеспечивается, например, первый набор из n зондов 2, обозначенный 2а, расположенный в одной и той же экваториальной плоскости, проходящей через измерительную точку 40, второй набор из n зондов 2, обозначенный 2b, расположенный во второй плоскости, параллельной первой экваториальной плоскости, и установленный со вторым отрицательным углом широты относительно первого набора 2a зондов, третий набор из n зондов 2, обозначенный 2c, расположенный в третьей плоскости, параллельной первой экваториальной плоскости, и смещенный на третий угол широты относительно этой экваториальной плоскости, причем этот третий угол имеет то же самое абсолютное значение, что и второй угол, но направлен в противоположном направлении, а также другой зонд 2, 2d, расположенный на вершине сферы, то есть, в верхней точке пересечения стоек, образуя верхний полюс сферы. Зонды 2 находятся на равноугольном расстоянии от каждой из первой, второй и третьей плоскостей, указанных здесь выше. Второй угол и третий угол равны, например, 45° по абсолютному значению, с одинаковыми значениями углов широты между меридианами, образованными стойками 30. В варианте осуществления, показанном на фиг.2, этот угол, например, идентичен по долготе и широте, равняясь, например, 45°. В этом конкретном варианте осуществления зонды распределяются по m меридианам и p=m/2-1 плоскостям широты с зондом, представленным как вариант, на вершине конструкции 3.
В варианте осуществления, показанном на фиг.2-4, опора 4 находится внутри замкнутого объема, определяемого опорной конструкцией 3.
Система 6 относительного перемещения для перемещения опорной конструкции 3 и опоры 4 испытываемого объекта относительно друг друга обеспечивается внутри замкнутого объема, определяемого этой опорной конструкцией 3 и стенками 31.
Эта система 6 перемещения позволяет смещать опорную конструкцию 3 и опору 4 относительно друг друга в соответствии по меньшей мере с одной степенью свободы и, например, в соответствии по меньшей мере с двумя степенями свободы, как например, в соответствии по меньшей мере с одним угловым перемещением вокруг геометрической оси, проходящей через измерительную точку 40, которая может содержать, например, угловое перемещение A1 в первой негоризонтальной и, например, в вертикальной плоскости, проходящей через измерительную точку 40, и/или другим угловым перемещением в другой негоризонтальной и, например, вертикальной плоскости, проходящей через измерительную точку 40 и пересекающей первую плоскость, и/или другое угловое перемещение вокруг вертикальной геометрической оси, проходящей через измерительную точку 40. В варианте осуществления, показанном на фиг.2-4, система 6 содержит средство выполнения первого относительного углового перемещения опорной конструкции 3 относительно опоры 4 в соответствии с первым скользящим углом A1 в негоризонтальной и, например, вертикальной плоскости (скользящее перемещение) и выполнения другого относительного углового вращательного перемещения в соответствии с другим углом A3 вращения вокруг вертикальной геометрической оси, проходящей через измерительную точку 40, которое позволяет получить все относительные возможные перемещения зондов 2 относительно опоры 4 и измерительной точки и затем выполнить пространственную супердискретизацию посредством сети зондов 2 во время измерения электромагнитного поля. Эта система 6 относительного перемещения соответствует, например, документу WO 2010/006891.
Система 6 относительного перемещения, расположенная внутри опорной конструкции 3, образуется по меньшей мере одной первой системой 60 относительного углового перемещения, позволяющей по меньшей мере одно определенное скользящее угловое перемещение A1 опорной конструкции 3 и опоры 4 относительно друг друга вокруг невертикальной геометрической оси. Эта система 6 содержит первую систему 60 для относительного углового перемещения опорной конструкции 3 на первый угол A1 скольжения. Эта первая система 60 углового перемещения содержит, например, направляющий рельс 62 внутри арки круга, прикрепленного к нижней и внутренней части опорной конструкции 3, в которой рельс 62 и паллета, поддерживаемая этим рельсом 62, следовательно, располагаются внутри замкнутого объема, определяемого опорной конструкцией 3, стенками 31 и нижней частью. Паллета 610 может перемещаться по углу в соответствии с первым углом A1 скольжения по рельсу 61, причем обеспечивается средство 620 для перемещения паллеты 610 по рельсу 62. Другая система 601 относительного перемещения опоры 4 для испытываемого объекта и опорной конструкции 3 при вращении относительно друг друга вокруг вертикальной оси обеспечивается, например, потому что опора 4 монтируется на паллете 610 посредством средства вращения 613, которое позволяет опоре 4 поворачиваться относительно паллеты по углу в соответствии с углом вращения A3. Эти средства вращения 613 позволяют конструкции 3 относительно поворачиваться вокруг опоры 4. На фиг.3 и 4 показан обшивочный лист 611 системы 6, которая также покрывается поглотителями 5 и содержит проход 612 для перемещения опоры 4 внутри системы, причем стенка 37 с пониженной проводимостью, формирующая клетку Фарадея, обеспечивается под системой 6 перемещения. Система 6 относительного перемещения опорной конструкции 3 относительно опоры 4 для испытываемого объекта, следовательно, полностью содержится внутри "интегрированной фарадизации" измерительной системы, что позволяет избежать, например, любого отверстия в нижней стенке 37 и, следовательно, любого разрыва фарадизации для пропускания через него опоры 4. Система 6 покрывается электромагнитными поглотителями 5, 51 посредством обшивочного листа 611 и, следовательно, позволяет получить непрерывность "интегрированной безэховости" измерительной системы, которая, например, позволяет избежать любого разрыва покрытия поглотителей и, следовательно, любого паразитного отражения и/или диффракции.
В варианте осуществления изобретения обеспечивается другая вторая система 63 для относительного перемещения опорной конструкции 3 относительно основания 61, между нижним основанием 61, предназначенным для расположения на земле, и опорной конструкцией 3, внутри которой крепится первая система 6 относительного перемещения опорной конструкции 3 относительно опоры 4 испытываемого объекта. Эта вторая система 63 углового перемещения подобна первой системе 60 углового перемещения и способна перемещать опорную конструкцию 3 относительно основания 61 по углу в той же самой вертикальной плоскости, но на второй угол A2 скольжения, противоположный первому углу A1 скольжения (второй угол A2 имеет то же самое абсолютное значение, что и первый угол A1, но имеет направление, противоположное первому углу A1), так что опора 4 остается, по существу, в заданном вертикальном положении, чтобы компенсировать в реальном времени шарнирное движение опоры 4 и исключить влияния гравитации на эту опору 4. Второй угол A2 скольжения и первый угол A1 скольжения расположены вокруг одной и той же геометрической оси X, которая является осью, проходящей через измерительную точку 40 и является, например, горизонтальной.
В первой вертикальной плоскости на фиг.6-9 показан вариант осуществления второй системы 63 относительного перемещения опорной конструкции 3 относительно основания 61. Эта система 63 содержит несколько опор, направляющих и роликов (63) качения для внешней поверхности 310 стенок 31 опорной конструкции 3, эта внешняя поверхность 310 является, например, изогнутой и сферической. Один или более роликов 631b из числа роликов 631 приводится во вращение двигателем 64, чтобы вращать внешнюю поверхность 310 относительно основания 61 на второй угол A2. Ролики 631 находятся в шасси 67, обеспечивающем проход на внешней поверхности 310 между роликами 631, это шасси имеет поверхность 310, изогнутую и вогнутую в направлении поверхности 310, это шасси 67, является, например, подвесной рамой или, так называемыми, скользящими салазками, и образуется участком сферы. Конечно, могут обеспечиваться несколько роликов 631, направленных параллельно оси, вокруг которой выполняются угловые перемещения A1 и A2, а также несколько других роликов, параллельных одному или более направлениям, чтобы ограничивать ход поверхности 310 по шасси 67.
Ниже здесь описывается рабочий пример систем 6 и 63 со ссылкой на фиг.7 и 8, где они показаны в разобранном виде для представления, когда они перемещаются из положения, показанного на фиг.6, в положение, показанное на фиг.9.
Используя элемент управления, пользователь управляет угловым перемещением первой системы 60, чтобы относительно сдвинуть опорную конструкцию 3 для зондов 2 и опору 4 для испытываемого объекта ОТ по отношению друг к другу на первый определенный угол A1 скольжения вокруг первой геометрической оси X, как показано на фиг.7. На фиг.7 показано гониометрическое движение A1 опоры 4 относительно конструкции 3, причем углы A1 и A2 первоначально предполагаются равными нулю, как показано на фиг.6.
Предусмотренный на опоре 4 для испытываемого объекта, ОТ является датчиком 66 для измерения реального угла наклона опоры 4 относительно вертикали. В положении, показанном на фиг.6, этот датчик 66 поэтому измеряет реальный нулевой угол отклонения относительно вертикали. В воображаемом положении, показанном на фиг.7, этот датчик 66 поэтому измеряет реальный угол A1 отклонения относительно вертикали.
Двигатель 64 и датчик 66 присоединяются к контуру обратной связи, чтобы управлять приводным двигателем 64 как функцией реального угла отклонения опоры 4 относительно вертикали, мгновенно измеряемого датчиком 66.
Контур 65 имеет корректор, у которого в качестве установочной точки используется измеренный угол датчика 66 нуля, соответствующий заданному положению опоры 4. Корректор действует по команде двигателя 64, чтобы корректировать реальный угол, измеренный датчиком 66, и делать его равным этой установочной точке.
В воображаемом положении на фиг.8 с помощью ролика 631b, приводимого в движение двигателем 64, этот контур 65 обратной связи поворачивает поверхность 310 и опорную поверхность 3 для зондов 2 на угол A2, равный противоположному реальному углу A1 отклонения, измеренному датчиком 66, вокруг геометрической оси X относительно неподвижного основания 61 и неподвижного шасси 67. На фиг.8 показано обратное вращение A2 поверхности 310 опорной конструкции 3 для зондов 2 относительно основания 61.
На фиг.9 комбинация гониометрического движения A1, показанного на фиг.7, и обратного вращения A2, показанного на фиг.8, перемещает опору 4 объекта ОТ обратно в заданное положение, показанное на фиг.6, относительно вертикального заданного положения, так называемого, вертикального, в котором мачта 4 считается расположенной вертикально.
Гониометрическое движение A1, показанное на фиг.7, и обратное вращение A2, показанное на фиг.8, являются одновременными и синхронизированными контуром 65 обратной связи по положению. Вертикальность мачты 4 обеспечивается постоянно. Поэтому, как только первая система 60 движется, чтобы переместить по углу опору 4 вокруг оси X, контур 65 вызывает угловое перемещение опорной конструкции 3 для зондов в обратном направлении, чтобы поддерживать опору 4 вертикальной. Фиг.7 и 8 являются воображаемыми в том, что гониометрическое движение и обратное вращение выполняются небольшими последовательными шагами, которые не наклоняют опору 4, как это показано. Наконец, только на фиг.9 показана опорная конструкция 3 зондов 2, которая повернута на первый угол A1 относительно опоры 4, причем последняя остается в одном и том же положении по вертикали во время всего движения.
На деле, качание опоры 4 относительно вертикали может вызывать изгиб последней на высоте, разделяющей измерительную точку 40, в которой должен быть расположен испытываемый объект, и опорную конструкцию 3, что может дать ошибку при определении положения измерительной точки 40. На деле, требуется высокий уровень точности при позиционировании измерительной точки 40 относительно теоретической точки соединения пересечения зондов 2. Измерительная точка 40, в которой располагается испытываемый объект, должна находиться в этой теоретической точке соединения пересечения зондов 2 или быть очень близка к этой теоретической точке соединения пересечения зондов 2. Например, для рабочей частоты зондов 6 ГГц измерительная точка 40 должна находиться в теоретическом кубе со стороной 1,5 мм вокруг этой теоретической точки соединения пересечения зондов 2. Для зондов, работающих на частоте 18 ГГц, измерительная точка 40 должна находиться в теоретическом кубе со стороной 500 мкн вокруг этой теоретической точки соединения пересечения зондов 2. В результате, изгиб опоры 4, который вызывается ее наклоном относительно вертикали, приводит к риску выхода измерительной точки из ее допусков по позиционированию. Благодаря двум комплементарным системам углового позиционирования, упомянутым здесь выше, конкретно, первая система 60 для углового позиционирования опоры 4, расположенной внутри опорной конструкции 3, и вторая система 63 углового позиционирования, расположенная между опорной конструкцией 3 и основанием 61, прикрепленным к земле, опора 4 удерживается в заданном вертикальном положении и существует опорная конструкция 3, которая движется по углу относительно основания и опоры 4 испытываемого объекта. Эта двойная система называется антигравитационной. Эта двойная система позволяет совершенно просто помещать на опору 4 тяжелые объекты, не создавая при этом риск изгиба опоры 4 или даже повреждения опоры 4 или даже падения из-за чрезмерного отклонения и ухудшения точности измерений или даже осуществимости измерений. Кроме того, эта антигравитационная система позволяет, например, иметь большее угловое пространство между зондами 2 и, следовательно, увеличивать количество зондов 2, поскольку траектория гониометрического движения системы 6 более не ограничивается по амплитуде из-за ограничений по изгибу и скручиванию опоры 4.
В соответствии с вариантом осуществления изобретения, показанным на фиг.10, обеспечивается система 7 индивидуального регулирования механического выравнивания зондов 2 относительно измерительной точки 40. Эта система 7 регулирования выравнивания содержит, например, средство 70 моторизации зонда 2, расположенное на его опорной конструкции, соответствующее по меньшей мере одной степени свободы, отличной от той, которая соответствует направлению DP нацеливания зонда 2 в направлении измерительной точки 40 и, например, в соответствии по меньшей мере с двумя направлениями каждого зонда 2, которые перпендикулярны или пересекают направление DP нацеливания зонда в направлении измерительной точки 40. Например, также обеспечивается автоматическое устройство 72 выравнивания, основанное, например, на оптической камере 71, например, камере на приборах с зарядовой связью (типа CCD). Во время этапа установки измерительной системы или даже этапа подготовки к выполнению измерений электромагнитных излучений, оптическая камера 71 располагается, например, точно в измерительной точке 40, закрепленной на опорной мачте 4 и ориентируется последовательно в направлении каждого зонда 2, чтобы управлять соответствующим позиционированием и соответствующим выравниванием зонда 2 с помощью изображения, получаемого камерой 71, причем зонд 2 формирует идентифицируемую трассу CR, например, в форме крестиков, на полученном камерой изображении. Как показано на фиг.10, система 7 содержит блок 70 для моторизации зонда 2 на опорной конструкции 3, в соответствии с тремя измерениями в пространстве, чтобы позволить перемещать зонд 2 в соответствии с этими тремя измерениями относительно конструкции 3, при поступательном движении и/или при вращении. Многоосевой контроллер 73 позволяет приводить в действие блок 70 моторизации в соответствии со степенью свободы. Камера 71 прикрепляется к модулю 74 для анализа изображения, поступающего для обнаружения в этом изображении трассы CR зонда 2, в котором изображение камеры 71 также может отображаться, например, на контрольном экране 75. Модуль 74 для анализа изображения соединяется с модулем 76 управления, в свою очередь, управляющим многоосным контроллером 73 в системе управления с обратной связью в положениях, где трасса оставлена зондом 2 в изображении камеры 71 на заданной трассе TRC установочных точек, соответствующей должному выравниванию направления DP нацеливания на измерительную точку 40, причем эта трасса TRC является целью для программного обеспечения. Модуль 76 поэтому программируют так, чтобы зонд 2 перемещался относительно его опорной конструкции 3 посредством контроллера 73 и блока 73 моторизации, так чтобы реальная трасса CR зонда совпадала с трассой TRC из установочных точек. Модуль 76 соединяется с модулем 77 для программирования пользователем и с устройством 78 памяти для экономии на пробах и/или регулировках, проводимых для каждого зонда. Зонд затем удерживается блоком 70 моторизации в положении выравнивания на измерительной точке 40.
Это гарантирует, что каждый зонд 2 правильно выровнен в одной и той же измерительной точке 40 для последующих измерений, которые могут быть сделаны зондом 2.
Оптическая камера может, например, также быть соединена с лазерным прицелом зондов.
Зонды 2 позволяют посылать или принимать электромагнитное излучение, определенное заранее, в направлении испытываемого объекта или от испытываемого объекта, помещенного в измерительной точке 40, чтобы определить характеристики реакции объекта на посланное электромагнитное излучение. Конечно, возможно посылать различные электромагнитные излучения, хотя они и были определены заранее, по законам, вычисленными компьютером, чтобы моделировать трехмерные электромагнитные среды. Таким образом, устройство, соответствующее изобретению, позволяет формировать трехмерные электромагнитные сценарии, представляющие реальные рабочие условия испытываемого оборудования. Таким образом, объекты, которые могут испытываться в измерительной точке 40, могут быть так называемыми "пассивными" испытываемыми объектами, содержащими одну или более антенн, питаемых кабелями, или же могут быть так называемыми "активными "испытываемыми объектами или даже "беспроводными" объектами, которые являются испытываемыми объектами, имеющими свою собственную батарею питания, свою собственную интегрированную приемную и/или передающую систему и свой собственный протокол связи.
В варианте осуществления, показанном на фиг.11-13, опорная конструкция (3) сети зондов (2) содержит первую опорную часть (3001) для поддержки первой группы зондов (2), прикрепленную на нижнем основании (3002), и вторую опорную часть (3003) для поддержки второй группы зондов (2), способную двигаться по нижнему основанию (3002) между первым закрытым положением относительно первой части (3001), чтобы формировать клетку Фарадея, и вторым положением, дальним или открытым относительно первой части (3001), чтобы создать пространство (3010) свободного прохода между первой частью (3001) и второй частью (3003). Некоторые из зондов 2 (первая группа) расположены поэтому на первой части 3001, тогда как другие зонды 2 расположены на второй части 3003. Первая часть (3001) и вторая часть (3003) формируются, например, половиной опорной конструкции 3, являющейся, например, по существу, полусферической. Раздельное и свободное пространство 3010 между двумя частями 3001 и 3003 является, например, вертикальным. Первая часть (3001) и вторая часть (3003) содержат, соответственно, по меньшей мере один первый край (3005) и по меньшей мере один второй край (3006), которые повернуты в направлении друг друга в первом- закрытом положении и которые являются, например, вертикальными или перпендикулярными, например, к плоскости нижнего основания 3002.
В варианте осуществления, показанном на фиг.11-13, вторая часть (3003) шарнирно вращается вокруг вертикальной оси (3004) на нижнем основании 3002 для перемещения при вращении вокруг этой вертикальной оси (3004) между первым положением и вторым положением.
В варианте осуществления, показанном на фиг.11-13, устройство содержит по меньшей мере один двигатель (3019) для движения второй части (3005) относительно первой части (3001) между первым положением и вторым положением и в первом положении способно удерживать вторую часть (3003) закрытой относительно первой части (3001), чтобы сформировать клетку Фарадея. Двигатель 3019 и ось 3004 располагаются, например, снаружи замкнутого пространства, которое ограничивается частями 3001 и 3003 в первом закрытом положении. Двигатель 3019 располагается, например, на оси 3004. Первая часть 3001 содержит, например, под зондами 2 и под стойками 30 первую нижнюю промежуточную плиту 3009, прикрепленную к основанию 3002. Вторая часть 3003 содержит, например, под зондами 2 и под стойками 30 вторую нижнюю промежуточную плиту 3011, которая, следовательно, тоже может двигаться вместе с частью 3003. Плиты 3009 и 3011 содержат, например, нижнее отверстие 3012 для прохода к опоре 4 испытываемого объекта. Опора 4 может служить, например, в различных вариантах осуществления изобретения для размещения человека, например, в сидячем положении на сидении или стуле 401, прикрепленном к нижней части (мачта 4001) опоры 4. Система 6, 60 относительного перемещения, описанная выше, может обеспечиваться, например, для перемещения опоры 4 вокруг невертикальной оси относительно конструкции 3, чтобы создать угол скольжения в первом закрытом положении, и крепится к основанию 3002. Система 601 перемещения опоры 4 может также обеспечиваться для того, чтобы иметь свой собственный угол вращения вокруг другой оси, описанной здесь выше. Плита 3011 соединяется с осью 3004 вращения, чтобы вращаться вокруг последней. Задний нижний рычаг 3013 обеспечивается между осью 3004 вращения и частью 3001 над плитой 3009.
В варианте осуществления, показанном на фиг.11-13, первый край (3005) и/или второй край (3006) содержит по меньшей мере одно радиочастотное упругое соединение (3007), расположенное так, чтобы сжиматься другим соединением первого края (3005) и/или второго края (3006) в первом закрытом положении. Это соединение или эти соединения являются, например, электропроводящими. Например, первый край (3005) и второй край (3006) содержат, соответственно, по меньшей мере одно первое радиочастотное упругое соединение (3007) и по меньшей мере одно второе радиочастотное упругое соединение, которые расположены с возможностью сжатия другим первым краем (3005) и вторым краем (3006) в первом закрытом положении или так, чтобы сжиматься относительно друг друга в первом закрытом положении. Электрическая непрерывность обеспечивается соединением или соединениями между краями 3005 и 3006, расположенными обращенными друг к другу в первом закрытом положении, чтобы электрически соединяться друг с другом. Радиочастотное упругое соединение или радиочастотные упругие соединения формируются, например, соединением, изготовленным из упругого материала, который может быть эластомером, например, резиной, в котором в этом упругом материале располагаются электропроводящие сплетенные проволоки. Это соединение или эти соединения называются металлизированными радиочастотными упругими соединениями. Края 3005 и 3006 являются, например, плоскостью для передачи давления на единое соединение или соединения в первом закрытом положении. В первом закрытом положении двигатель 3019 прижимает край 3006 к краю 3005, чтобы сжать радиочастотное упругое соединение или радиочастотные упругие соединения и обеспечить надежный электрический контакт между краями 3005 и 3006. ри перемещении из первого закрытого положения в дальнее второе положение соединение или соединения восстанавливают свою начальную несжатую форму. Проводящее радиочастотное упругое соединение 3007 или радиочастотные упругие соединения 3007 обеспечиваются на всех частях, противоположных частям 3001 и 3003 в первом закрытом положении, конкретно, на краю(-ях) 3005 и/или 3006, а также на краю(-ях) 3016 плиты 3009 и/или 3011 (край(-я) плиты 3011 контактирует с краем 3016 плиты 3009 в первом закрытом положении), и на краю верхнего горизонтального завершения 3015 части 3001 и/или на верхнем отверстии 3017 части 3003 формы, соответствующей отверстию 3017 (край(-я) верхнего горизонтального завершения 3015 контактирует с краем верхнего отверстия 3017 в первом закрытом положении).
Например, внизу первая часть 3003 содержит колеса 3008, имеющие контакт с нижним основанием (3002), которое содержит, например, верхний рельс (3018) для качения и направления колес 3008 в направлении части 3001. Колеса устанавливаются, например, под плитой 3011.
Настоящее изобретение имеет преимущество в том, что имеются две плоские поверхности, противоположные друг другу для фарадизации, которая осуществляется посредство металлизированных упругих соединений, работающих под давлением и которые восстанавливают свою начальную форму во время открывания (перемещения из первого закрытого положения во второе дальнее положение). Проведение фарадизации становится более простым. Большое преимущество настоящего варианта осуществления состоит также в том факте, что сфера закрывается под действием давления, создаваемого двигателем 3019. Вдоль сфер 3005 и 3006 противоположно располагаются, например, небольшие первичные пружины, которые в результате сжимаются в первом закрытом положении. Затем, если подача электроэнергии прерывается, двигатель или двигатели 3019 автоматически сбрасывают закрывающее давление и небольшие пружины включают действие открывания, которое происходит естественным путем. Это значительно облегчает все процедуры обеспечения безопасности, когда нажимается аварийная кнопка в случае пожара или при прерывании подачи электропитания: в любом случае, электропитание отключается и сфера открывается естественным образом без внешнего воздействия. Кроме того, этот тип открывания позволяет получить гораздо больший размер прохода, необходимый, например, для действий по техническому обслуживанию.
Во втором дальнем положении пространство (3010) для свободного прохода между первой частью (3001) и второй частью (3003), например, описывает угол открывания между 20° и 50° и, например, равный 40°.
Части 3001 и 3003 имеют такой размер, что в них может помещаться взрослый человек, который может испытывать объект, закрепленный и/или удерживаемый человеком, находящимся внутри закрытого пространства, ограниченного конструкцией 3, в первом закрытом положении. Высота, ширина и длина внешних поверхностей опорной конструкции 3 составляют, например, более 3,5 м.
Также могут быть обеспечены подъемник 3014 для доступа к сиденью 401 или опоре 4, где мачта 4, действующая для поддержки испытываемого объекта, занимает место стула 401, как показано на фиг.1-10, причем на земле предусматривается резервное место для размещения на нем подъемника 3014.
Для открывания (движения из первого закрытого положения во второе дальнее положение) и закрывания (движения из второго дальнего положения в первое закрытое положение) частей 3001 и 3003 обеспечивается интерфейс управления, например, кнопка электрического управления. Например, во время открывания камеры звуковой сигнал и вспышки света предупреждают тех, кто находится вблизи, чтобы они встали подальше во избежание травмы любого, кто находится вблизи системы. Если измерения должны делаться на человеке, этот человек должен надеть ремни безопасности и датчики давления на ножках стула 401 должны быть включены. Подъемник 3014 также должен быть полностью втянут, чтобы система могла снова закрыться. Затем оператор может закрыть систему. После этого измерение может быть сделано в первом закрытом положении. Когда измерение закончено, камера может быть открыта, подъемник может подняться и испытываемый человек может выйти или испытываемый объект может быть извлечен.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ЭЛЕКТРОМАГНИТНОГО ИСПЫТАНИЯ ОБЪЕКТА | 2011 |
|
RU2573122C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ УСТРОЙСТВ ДЛЯ ХРАНЕНИЯ ИНФОРМАЦИИ (ВАРИАНТЫ) | 1996 |
|
RU2188464C2 |
| Отслеживающая система и маркерное устройство, подлежащее отслеживанию отслеживающей системой | 2019 |
|
RU2806663C2 |
| ДАТЧИК ДАВЛЕНИЯ ДЛЯ ВВЕДЕНИЯ В СИСТЕМУ КРОВООБРАЩЕНИЯ ЧЕЛОВЕКА | 2019 |
|
RU2806618C2 |
| ВЕРИФИКАЦИЯ ДАННЫХ ДАТЧИКОВ | 2019 |
|
RU2726840C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОЙ ВЕЛИЧИНЫ, ХАРАКТЕРИЗУЮЩЕЙ ЭЛЕКТРОМАГНИТНОЕ ИЗЛУЧЕНИЕ ИССЛЕДУЕМОГО ОБЪЕКТА | 2009 |
|
RU2510511C2 |
| Стояночный отопитель | 2023 |
|
RU2817912C1 |
| УСТРОЙСТВА, СИСТЕМЫ И СПОСОБЫ ТРЕХМЕРНОЙ ПЕЧАТИ | 2014 |
|
RU2641945C2 |
| РОТАЦИОННЫЙ РАСХОДОМЕР ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ПОТОКА | 2006 |
|
RU2397450C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ ВОКРУГ ОБЪЕКТА | 1991 |
|
RU2014624C1 |
Изобретение относится к исследованию электромагнитного излучения от различной аппаратуры в закрытом пространстве, например в безэховой камере. Устройство для электромагнитного испытания объекта содержит сеть электромагнитных зондов (2), конструкцию (3) для поддержки сети зондов (2) и опору (4) для поддержания испытываемого объекта. В соответствии с изобретением конструкция (3) закрывается в трех измерениях пространства, полностью окружая опору (4) испытываемого объекта посредством по меньшей мере одной проводящей стенки (31), образующей клетку Фарадея, которая на ее внутренней стороне выстлана безэховыми электромагнитными поглотителями (5), расположенными с определенными интервалами между зондами (2). В замкнутом объеме, ограниченном опорной конструкцией (3), также размещена система (6) относительного перемещения для относительного перемещения опоры (4) по отношению к опорной конструкции (3) по меньшей мере с одной степенью свободы и система (6) относительного перемещения, расположенная внутри опорной конструкции (3), образована по меньшей мере одной первой системой (60) относительного углового перемещения, обеспечивающей выполнение по меньшей мере одного заданного относительного скользящего углового перемещения (А1) опорной конструкции (3) по отношению к опоре (4) вокруг невертикальной геометрической оси. Опорная конструкция (3) покоится на нижнем основании (61), при этом между основанием (61) и опорной конструкцией (3) размещена вторая другая система (63) углового перемещения, позволяющая перемещать опорную конструкцию (3) относительно основания (61) на второй угол (А2) с тем же самым абсолютным значением и противоположно скользящему угловому перемещению (А1) первой системы (60) относительного углового перемещения опоры (4) относительно опорной конструкции (3), так что опора (4) для испытываемого объекта остается в заданном и, по существу, постоянном положении относительно вертикали. 14 з.п. ф-лы, 13 ил.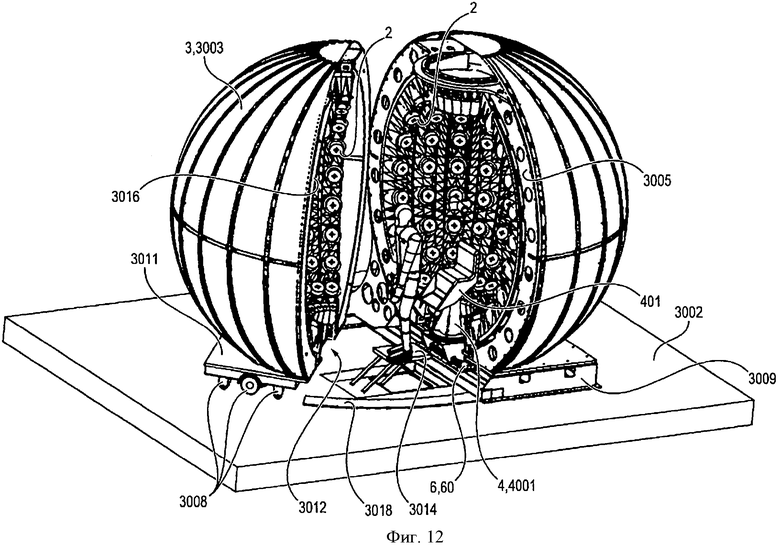
1. Устройство для электромагнитного испытания по меньшей мере одного объекта, содержащее сеть электромагнитных зондов (2) для передачи и/или приема электромагнитного излучения в направлении испытываемого объекта или от него, при этом устройство также содержит опорную конструкцию (3) для поддержки сети зондов (2), содержащую безэховые электромагнитные поглотители (5), и опору (4) для поддержки испытываемого объекта, отличающееся тем, что опорная конструкция (3) для поддержки сети зондов (2) закрыта в трехмерном пространстве, полностью окружая опору (4) для поддержки испытываемого объекта, посредством по меньшей мере одной проводящей стенки (31), образующей клетку Фарадея, которая на ее внутренней стороне выстлана безэховыми электромагнитными поглотителями (5, 51), расположенными в промежутках между зондами (2),
опорная конструкция (3) содержит по меньшей мере одну стойку (30), к которой крепятся зонды (2), и по меньшей мере одну проводящую стенку (31), при этом безэховые электромагнитные поглотители (5) также размещены на внутренней стороне стоек (30) в промежутках между зондами (2),
опорная конструкция (3) ограничивает замкнутый объем, включающий опору (4) для испытываемого объекта,
в замкнутом объеме, ограниченном опорной конструкцией (3), также размещена система (6) относительного перемещения для относительного перемещения опоры (4) по отношению к опорной конструкции (3) по меньшей мере с одной степенью свободы,
система (6) относительного перемещения, расположенная внутри опорной конструкции (3), образована по меньшей мере одной первой системой (60) относительного углового перемещения, обеспечивающей выполнение по меньшей мере одного заданного относительного скользящего углового перемещения (А1) опорной конструкции (3) по отношению к опоре (4) вокруг невертикальной геометрической оси,
опорная конструкция (3) покоится на нижнем основании (61),
при этом между основанием (61) и опорной конструкцией (3) размещена вторая другая система (63) углового перемещения, позволяющая перемещать опорную конструкцию (3) относительно основания (61) на второй угол (А2) с тем же самым абсолютным значением и противоположно скользящему угловому перемещению (А1) первой системы (60) относительного углового перемещения опоры (4) относительно опорной конструкции (3), так что опора (4) для испытываемого объекта остается в заданном и, по существу, постоянном положении относительно вертикали.
2. Устройство по п. 1, отличающееся тем, что проводящая стенка (31) является изогнутой или имеет грани.
3. Устройство по п. 1, отличающееся тем, что опорная конструкция (3) имеет, в целом, сферическую форму.
4. Устройство по любому из пп. 1-3, отличающееся тем, что по меньшей мере одна проводящая стенка (31) прикреплена к внешней стороне по меньшей мере одной стойки (30) посредством по меньшей мере одного радиочастотного соединения (32).
5. Устройство по любому из пп. 1-3, отличающееся тем, что опорная конструкция (3) сети зондов (2) содержит первую часть (3001) для поддержки первой группы зондов (2), прикрепленную на нижнем основании (3002), и вторую часть (3003) для поддержки второй группы зондов (2), способную двигаться по нижнему основанию (3002) между одним или другим первым закрытым положением относительно первой части (3001), при котором формируется клетка Фарадея, и вторым положением, смещенным относительно первой части (3001), чтобы создать пространство (3010) свободного прохода между первой частью (3001) и второй частью (3003).
6. Устройство по п. 5, отличающееся тем, что вторая часть (3003) шарнирно вращается вокруг вертикальной оси (3004) на нижнем основании (3002) для перемещения при вращении вокруг этой вертикальной оси (3004) между одним или другим первым положением и вторым положением.
7. Устройство по п. 5, отличающееся тем, что содержит по меньшей мере один двигатель (3019) для перемещения второй части (3005) относительно первой части (3001) между одним или другим первым положением и вторым положением, при этом в первом положении двигатель способен удерживать вторую часть (3003) сомкнутой с первой частью (3001), чтобы сформировать клетку Фарадея.
8. Устройство по п. 5, отличающееся тем, что первая часть (3001) и вторая часть (3003) содержат, соответственно, по меньшей мере один первый край (3005) и по меньшей мере один второй край (3006), которые повернуты в направлении друг друга в первом закрытом положении, причем первый край (3005) и/или второй край (3006) содержат по меньшей мере одно радиочастотное упругое соединение (3007) расположенное так, чтобы сжиматься под действием другого из указанных первого края (3005) и второго края (3006) в первом закрытом положении.
9. Устройство по п. 1, отличающееся тем, что вторая другая система (63) углового перемещения содержит множество опорных роликов (631) для поддержки внешней изогнутой поверхности (310) стенки (31) опорной конструкции на основании (61) и по меньшей мере один приводной двигатель (64) для привода по меньшей мере одного из роликов (631), чтобы вращать упомянутую внешнюю изогнутую поверхность (310) стенки (31) опорной конструкции (3) относительно основания (61) на упомянутый второй угол (А2).
10. Устройство по п. 1, отличающееся тем, что также содержит:
элемент управления для управления скользящим угловым перемещением (А1) для первой системы (60) углового перемещения,
по меньшей мере один датчик (66) для измерения реального угла опоры (4) для испытываемого объекта относительно вертикали,
контур (65) обратной связи для управления приводным двигателем (64) как функцией угла, измеряемого датчиком (66), так чтобы угол, измеренный датчиком (66), имел постоянное значение, соответствующее упомянутому заданному положению опоры (4) относительно вертикали.
11. Устройство по любому из пп. 1-3, отличающееся тем, что зонды (2) распределены равномерно по окружности, соответствующей по меньшей мере одной сферической координате, в отношении одной и той же измерительной точки (40) зондов (2).
12. Устройство по любому из пп. 1-3, отличающееся тем, что содержит индивидуальную систему (7) регулирования, выполненную с возможностью регулирования механического выравнивания зонда (2) относительно одной и той же измерительной точки (40) для всех зондов (2), причем измерительная точка (40), в которой находится испытываемый объект, центрована на опоре (4).
13. Устройство по п. 12, отличающееся тем, что индивидуальная система (7) регулирования для регулирования механического выравнивания зонда (2) связана по меньшей мере с одной камерой (71) оптического обнаружения, расположенной в измерительной точке (40), для измерения механического выравнивания зонда (2).
14. Устройство по п. 12, отличающееся тем, что индивидуальная система (7) регулирования для регулирования механического выравнивания зонда (2) содержит моторизацию упомянутого зонда (2) на опорной конструкции (3), чтобы перемещать зонд (2) относительно опорной конструкции (3) по меньшей мере с одной степенью свободы, по-иному, чем в направлении (DP) нацеливания зонда (2) на измерительную точку.
15. Устройство по п. 14, отличающееся тем, что содержит на измерительной точке (40) модуль (74) анализа для анализа изображения, полученного камерой, чтобы обнаружить в этом изображении траекторию (CR) упомянутого зонда (2), и модуль (76) обратной связи для управления моторизацией (70) для выравнивания обнаруженной траектории (CR) зонда с траекторией (TRC) из установочных точек, соответствующей выравниванию зонда (2).
| JP 2006234602 A 07.09.2006 | |||
| US 5532704 A1 02.07.1996 | |||
| WO 2010006891 A1 21.01.2010 | |||
| US 7161357 B2 09.01.2007 | |||
| US 7102562 B2 05.09.2006 | |||
| US 6850851 B1 01.02.2005. |

