ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение относится к системе управления для приведения в действие группы электродвигателей посредством одного инверторного моста; в частности, к системе управления для изменения входной мощности одновременно с нагрузкой и скоростью вращения при приведении в действие группы электродвигателей посредством инверторного моста.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] В настоящее время электроэнергия во всем мире в основном преобразуется в механическую энергию посредством электродвигателей. Как показывают исследования в разных странах, в США, в Японии, во Франции и в России электроэнергия, потребляемая электродвигателями, составляет более 60% всего промышленного потребления электроэнергии, и, как показало исследование, выполненное соответствующими государственными органами, в магистральных сетях электроснабжения в Китае электроэнергия, потребляемая электродвигателями, составляет от 60 до 68% от всего промышленного потребления электроэнергии, что приблизительно совпадает с этим показателем в развитых странах. В этой связи страны по всему миру заняты разработкой и популяризацией различных передовых технологий и устройств с целью достижения экономичной работы электродвигателей. В Китае были достигнуты значительные результаты и был получен значительный опыт в разработке и адаптации различной аппаратуры и технологий для достижения экономичной работы электродвигателей.
[0003] С развитием электрических и электронных технологий, микроэлектронных технологий, технологий управления и других технологий, таких как промышленная обработка, появились различные устройства регулировки скорости, среди которых устройства регулировки скорости с преобразованием частоты являются наиболее эффективными и перспективными. В частности, с применением технологий векторного управления и технологий прямого управления моментом, технологии частотного преобразования совершенствуются и занимают лидирующее положение в приводах переменного тока благодаря широкому диапазону регулировки скорости, высокой точности стабилизации скорости, быстрому динамическому отклику и эффективности работы в реверсном режиме в четырех квадрантах прямоугольной системы координат. Эффективность регулировки скорости по технологии преобразования частоты сравнима с эффективностью привода постоянного тока. Существует тенденция к тому, что привод постоянного тока будет заменен на привод переменного тока.
[0004] В настоящее время такие всемирно известные предприятия, как, например, Siemens Electrical Drives Ltd. (Германия), Vaasa Control System Co.Ltd. (Финляндия), ABB (Швейцария), Schneider Electric Co. (Франция) и Yaskawa (Япония), доминируют в серийном производстве таких электрических и электронных устройств, а также устройств с преобразованием частоты. Продукцию вышеупомянутых промышленно развитых стран можно найти в соответствующих сферах применения в Китае. При применении этой продукции, однако, используется один инвертор частоты для одной электрической функции, причем для одного инвертора частоты требуется один инверторный мост. Если для системы регулировки скорости с изменением частоты необходимо обеспечить функцию силовой обратной связи, приходится добавлять дополнительный инверторный мост. Очевидно, что описанная выше конфигурация не только делает систему громоздкой, сложной и недостаточно стабильной, но и ухудшает удобство обслуживания и соотношение между производительностью и стоимостью.
[0005] Ввиду описанных выше недостатков известных технологий преобразования частоты автор изобретения провел множество экспериментов на подъемных кранах, нефтяных насосах, водонапорных насосах, стальных шаровых мельницах и т.п., чтобы выявить, каким образом может быть реализована регулировка скорости ротора с использованием преобразования частоты при одновременном приведении в действие группы двигателей асинхронно посредством инверторного моста. Дополнительно были спроектированы и изготовлены кожух и емкость для устройств переменного и постоянного тока, что позволяет наладить серийное производство и массовое применение и получить хороший эффект. В этой связи в Китае были поданы заявки и получены три патента ZL 200810094147.6, ZL 200810048732.2 и ZL 200810048252.2.
[0006] При этом в электрической приводной системе с одной стороны действует уравнение баланса мощности электродвигателей:
Р1=3 U1 I1 COSφ1,
[0007] где:
Р1 - входная мощность электродвигателя (кВт);
U1 - фазное напряжение обмотки статора (кВ);
I1 - фазный ток обмотки статора (А);
φ1 - угол между фазным напряжением и фазным током;
3 U1 I1 COSφ1 - коэффициент мощности электродвигателя.
[0008] С другой стороны, для упрощения анализа, исходят из отсутствия потерь меди статора и потерь стали электродвигателя, а также механических потерь ротора, так что:
P1=P2+PS
[0009] где Р2 - выходная мощность электродвигателя, то есть мощность нагрузки;
[0010] PS - мощность скольжения электродвигателя, то есть мощность, которая подается обратно в электрическую сеть или электродвигатель посредством инверторного моста после регулировки скорости электродвигателя.
[0011] При этом Ps=SP1;
[0012] Таким образом, P1=P2+Ps=P2+SP1
[0013] Или P2=P1-SP1=P1(1-S)
[0014] На основании этого в электрической приводной системе коэффициент скольжения S электродвигателя равен:
[0015] Следовательно:

[0016] То есть:
[0017] где N0 - синхронная скорость вращения ротора электродвигателя;
N - мгновенная скорость вращения ротора электродвигателя.
[0018] Синхронная скорость N0 вращения ротора электродвигателя является постоянной, поэтому из приведенного выше уравнения следует, что выходная мощность Р1 электродвигателя связана одновременно с выходной мощностью Р2 электродвигателя (т.е. нагрузке) и мгновенной скоростью N вращения ротора электродвигателя.
[0019] Итак, становится очевидным, что электрическая приводная система имеет три рабочих состояния: в первом рабочем состоянии скорость вращения ротора электродвигателя постоянна, в то время как нагрузка системы меняется мгновенно; во втором рабочем состоянии нагрузка системы постоянна, в то время как скорость вращения ротора электродвигателя меняется мгновенно; в третьем же рабочем состоянии происходит мгновенное изменение как нагрузки системы, так и скорости вращения ротора электродвигателя.
[0020] Известные конструкции электродвигателя не удовлетворяют этим требованиям к электрической приводной системе; другими словами, известные электродвигатели не могут постоянно работать с высокой производительностью. Кроме того, при практическом использовании электрической приводной системы лишь технический персонал содействует электрической приводной системе в описанном выше первом или втором рабочем состоянии. Электрические приводные системы в первом и втором рабочем состоянии были рассмотрены в документе «Практическое руководство по модернизации электродвигателя с целью энергосбережения» (Practical Manual For Energy-Saving Reforming On An Electric Motor», опубликованным Шанхайским научным издательством (Shanghai Science Publishing House) и в соответствующих патентных документах. Вместе с тем, в связи с быстрым развитием науки и техники, а также вследствие острой нужды в энергосбережении, необходимо создать электрическую систему управления средствами привода, применимую для рассмотренного выше третьего рабочего состояния.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0021] Настоящее изобретение направлено на создание технического решения, учитывающего ситуацию, когда происходит мгновенное изменение как нагрузки системы, так и скорости вращения ротора электродвигателя, то есть на создание электрической системы управления средствами привода в условиях рассмотренного выше "третьего рабочего состояния". Это решение представляет собой систему управления, обеспечивающую изменение входной мощности с учетом как нагрузки, так и скорости вращения. Другими словами, группа электродвигателей приводится в действие посредством одного инверторного моста; с одной стороны, входная мощность изменяется при мгновенном изменении каждой нагрузки в электрической приводной системе; с другой стороны, входная мощность изменяется при мгновенном изменении скорости вращения каждого работающего электродвигателя в электрической приводной системе. Кроме того, каждый электродвигатель работает независимо, с синхронной координацией и управлением в режиме реального времени и без какого-либо вмешательства.
[0022] Помимо этого, изобретение обеспечивает также функцию энергетической обратной связи и возврата энергии, то есть переменный ток на выходе инверторного моста подается обратно в электрическую сеть или электродвигатель с совпадением по частоте и по фазе, что позволяет решить в электродвигателе проблему "отбора мощности генератором" и обеспечить эффективную экономию энергии.
[0023] Для решения вышеуказанных задач предлагается следующее изобретение.
[0024] Система управления для изменения входной мощности в зависимости от скорости и нагрузки вращения при приведении в действие группы электродвигателей посредством одного инверторного моста, содержащая:
[0025] узел 1 регулировки напряжения статора, узел 2 электродвигателей, узел 3 регулировки скорости ротора, узел 4 инверторного моста, узел 5 управления и приведения в действие и узел 6 обработки сигнала, причем:
[0026] узел 1 регулировки напряжения статора содержит множество модулей регулировки напряжения статора (с первого модуля 1.1 регулировки напряжения статора по N-й модуль 1.N регулировки напряжения статора) для измерения коэффициента мощности в качестве управляющего сигнала входного напряжения с последующей регулировкой входной мощности посредством управления входным напряжением так, чтобы входная мощность изменялась при изменении нагрузки.
[0027] Узел 2 электродвигателей содержит множество электродвигателей (с первого электродвигателя М1 по N-й электродвигатель MN) для достижения асинхронной и одновременной работы каждого электродвигателя в электрической приводной системе.
[0028] Узел 3 регулировки скорости ротора содержит множество модулей регулировки скорости ротора (с первого модуля 3.1 регулировки скорости ротора по N-й модуль 3.N регулировки скорости ротора) для детектирования напряжения ротора и тока прерывателя в качестве управляющего сигнала входного напряжения, затем для регулировки входной мощности посредством управления входным напряжением для того, чтобы обеспечить изменение входной мощности при изменении скорости вращения.
[0029] Узел 4 инверторного моста используется для выпрямления сигналов переменного тока, которые имеют разную частоту и поступают с выхода ротора каждого работающего двигателя, в сигналы постоянного тока, с последующим инвертированием сигналов постоянного тока в сигналы переменного тока, которые имеют те же частоту и фазу, что и в сетях электропитания, с последующей эффективной подачей электроэнергии инвертированных сигналов переменного тока обратно в сети электропитания или электродвигатели.
[0030] Узел 5 управления и приведения в действие содержит множество модулей управления и приведения в действие (с первого модуля 5.1 управления и приведения в действие по N-й модуль 5.N управления и приведения в действие) для приема цифровых сигналов с узла 6 обработки сигнала, цифровой обработки, усиления и приведения в действие, для управления узлом регулировки напряжения статора и узлом регулировки скорости ротора, для осуществления управления в режиме реального времени с целью изменения входной мощности в зависимости от скорости и нагрузки вращения.
[0031] Узел 6 обработки сигнала содержит множество модулей обработки сигнала (с первого модуля 6.1 обработки сигнала по N-й модуль обработки сигнала 6.N) для приема соответствующих сигналов, детектированных каждым датчиком узла регулировки напряжения статора и узла регулировки скорости ротора, обработки сигнала и аналого-цифрового преобразования, передачи цифровых сигналов в каждый соответствующий узел управления и приведения в действие, для осуществления в режиме реального времени обработки сигнала и управления сигналом.
[0032] Предлагаемое техническое решение заключается в следующем: с одной стороны, детектируются в реальном времени коэффициенты мощности электродвигателя (то есть фазное напряжение и фазный ток статора) в качестве управляющего сигнала входного напряжения всей системы, после чего выполняется настройка входной мощности посредством управления управляющим сигналом входного напряжения так, чтобы входная мощность менялась при изменении нагрузки; при этом, с другой стороны, детектируются напряжение ротора электродвигателя, выходной ток выпрямителя, ток устройства защиты от перенапряжения и рабочий ток прерывателя в качестве управляющего сигнала входного напряжения всей системы, после чего осуществляется управление прерывателем посредством управления управляющим сигналом входного напряжения, что эквивалентно настройке входной мощности так, чтобы она менялась при изменении скорости вращения. Детектирование вышеуказанных различных сигналов осуществляется за счет установки различных датчиков, при этом соответствующее их изменение реализуется микропроцессорами под управлением соответствующей основной программы.
[0033] Изобретение обеспечивает следующие преимущества: предлагаемая конструкция основана на том соображении, что обновление программного обеспечения более предпочтительно, чем обновление аппаратных средств, причем доработка разрабатываемого программного обеспечения не приводит к физическому повреждению аппаратных средств. В изобретении использована мультимикропроцессорная (CPU) операционная система; разработана модульная схемная конфигурация, стандарт интерфейса и технология обработки сигнала. В изобретении реализуется управление в режиме реального времени рабочим состоянием, в котором входная мощность изменяется в зависимости как от нагрузки, так и от скорости вращения за счет просто механической конструкции и базовых аппаратных средств. При этом для обеспечения эффективного возврата мощности скольжения обратно в сеть электропитания или электродвигатели используется всего один инверторный мост. Изобретение характеризуется новизной конструкции, рациональной конфигурацией, надежной работой, удобством обслуживания, заметным энергосбережением и широкими возможностями применения в различных областях техники.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0034] На фиг.1 показана функциональная блок-схема согласно изобретению;
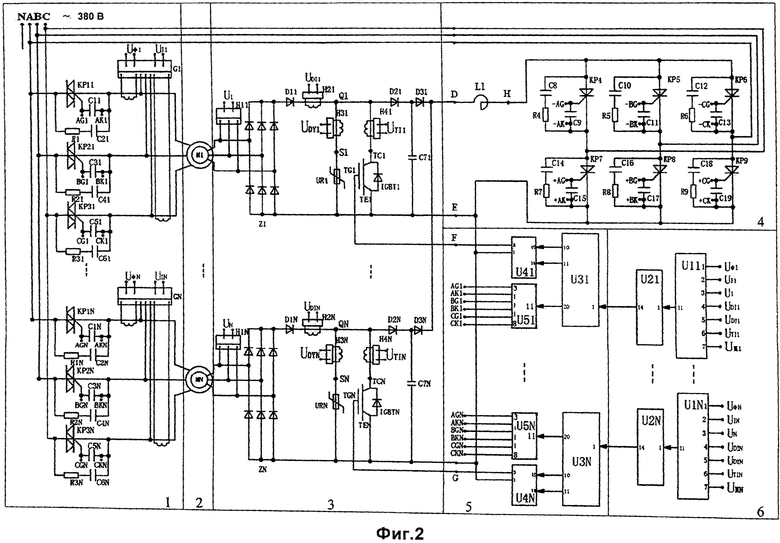
[0035] На фиг.2 показана принципиальная схема, иллюстрирующая взаимосвязь между шестью блоками согласно изобретению;
[0036] На фиг.3 показана принципиальная схема усилителя 1-го, 2-го и 3-го узлов согласно изобретению; и
[0037] На фиг.4 показана принципиальная схема усилителя 4-й, 5-й и 6-й узлов согласно изобретению.
[0038] Перечень ссылочных обозначений:
1 - устройство регулировки напряжения статора;
1.1 - первый модуль регулировки напряжения статора;
1.N - N-й модуль регулировки напряжения статора;
G1-GN - группа датчиков G1-GN коэффициента мощности;
КР11, КР21, KP31-KP1N, KP2N, KP3N - группа регуляторов напряжения статора;
С11, С21, С31, С41, С51, C61-C1N, C2N1, C3N, C4N, C5N, C6N - конденсаторная группа;
R11, R21, R31-R1N, R2N, R3N - резисторная группа;
 и UI1 - фазное напряжение каждых двух фаз в трех статорах первого электродвигателя М1 и напряжение постоянного тока, конвертированное из фазного тока каждой фазы в трех статорах первого электродвигателя М1;
и UI1 - фазное напряжение каждых двух фаз в трех статорах первого электродвигателя М1 и напряжение постоянного тока, конвертированное из фазного тока каждой фазы в трех статорах первого электродвигателя М1;
 и UIN - фазное напряжение каждых двух фаз в трех статорах N-го электродвигателя MN и напряжение постоянного тока конвертированное из фазного тока каждой фазы в трех статорах N-го электродвигателя MN;
и UIN - фазное напряжение каждых двух фаз в трех статорах N-го электродвигателя MN и напряжение постоянного тока конвертированное из фазного тока каждой фазы в трех статорах N-го электродвигателя MN;
2 - узел электродвигателей;
М1 - первый электродвигатель;
MN - N-й электродвигатель;
3 - узел регулировки скорости ротора;
3.1 - первый модуль регулировки скорости ротора;
3.N - N-й модуль регулировки скорости ротора;
Z1-ZN - выпрямительная группа (группа выпрямителей);
H1-HN - группа датчиков напряжения на основе эффекта Холла;
Н21, Н31, H41-H2N, H3N, H4N - группа датчиков тока на основе эффекта Холла;
IGBT1-IGBTN - группа прерывателей;
UR1-URN - группа устройств защиты от перенапряжения;
D11, D21, D31 и D11, D2N, D3N - вентильная группа;
C71-C7N - группа фильтрующих конденсаторов;
4 - группа инверторного моста;
L1 - реактор;
КР4, КР5, КР6, КР7, КР8, КР9 - кремниевый управляемый выпрямитель;
С8, С9, С10, С11, С12, С13, С14, С15, С16, С16, С17, С18, С19 - конденсатор;
R4, R5, R6, R7, R8, R9 - резистор;
U1 - фазное напряжение каждых двух фаз в трех роторах первого электродвигателя М1;
UN - фазное напряжение каждых двух фаз в трех роторах N-го электродвигателя MN;
UDI1 и UDIN - напряжения постоянного тока, конвертированные из выходного постоянного тока соответствующих выпрямителей Z1 и ZN;
UDY1 и UDZN - напряжения постоянного, конвертированные из избыточного тока, что протекает через соответствующие устройства UR1 и URN защиты от перенапряжения;
UTI1 и UTIN - напряжения постоянного тока, конвертированные из тока, что протекает через анод соответствующих прерывателей IGBT1-IGBTN;
5 - узел управления и приведения в действие;
5.1 - первый модуль управления и приведения в действие;
5.N - N-й модуль управления и приведения в действие;
U51-U5N - группа запускающих устройств;
6 - узел обработки сигнала;
6.1 - первый модуль обработки сигнала;
6.N - N-й модуль обработки сигнала;
U11-U1N - группа обработки сигнала;
U21-U2N - группа аналого-цифровых преобразователей;
UM1-UMN - напряжение работы в реальном масштабе времени.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0039] На фиг.1-4 показаны частные варианты осуществления изобретения.
[0040] Как показано на фиг.1-2, изобретение состоит из узла 1 регулировки напряжения статора, узла 2 электродвигателей, узла 3 регулировки скорости ротора, узла 4 инверторного моста, узла 5 управления и приведения в действие, а также узла 6 обработки сигнала, где:
[0041] узел 1 регулировки напряжения статора содержит множество модулей регулировки напряжения статора, с первого модуля 1.1 регулировки напряжения статора по N-й модуль 1.N регулировки напряжения статора; где N является целым числом больше 1.
[0042] Как показано на фиг.3, первый модуль 1.1 регулировки напряжения статора снабжен группой КР11, КР21, КР31 регулировки напряжения статора, резисторной группой R11, R21, R31 и конденсаторной группой С11, С21, С31, С41, С51 и С61; причем эти компоненты разделены на три блока: первый блок содержит КР11, R11, С11, С21, второй блок содержит КР21, R21, R31, R41, и третий блок содержит KP31, R31, R41, R51, R61. Входные концы этих трех блоков соединены с тремя фазами ABC сети электропитания соответственно, в то время как их выходные концы соединены с тремя статорами первого электродвигателя М1. Кроме того, имеется датчик G1 коэффициента мощности, который установлен на трехфазных линиях питания, которые соединены с указанными тремя статорами.
[0043] Аналогично, как показано на фиг. 3, N-й модуль 1.N регулировки напряжения статора снабжен группой KP1N, KP2N, KP3N регулировки напряжения статора, резисторной группой R1N, R2N, R3N и конденсаторной группой C1N, C2N, C3N, C4N, C5N и C6N; причем эти компоненты разделены на три блока: первый блок содержит KP1N, R1N, C1N, C2N, второй блок содержит KP2N, R2N, R3N, R4N, и третий блок содержит KP3N, R3N, R4N, R5N, R6N. Входные концы каждого из этих трех блоков соединены с тремя фазами ABC сети электропитания соответственно, в то время как их выходные концы соединены с тремя статорами первого электродвигателя М1. Кроме того, имеется датчик GN коэффициента мощности, который установлен на трехфазных линиях питания, которые соединены с указанными тремя статорами.
[0044] Как показано на фиг. 3, узел 2 электродвигателей содержит множество электродвигателей, с первого электродвигателя М1 по N-й электродвигатель MN. Три статора первого электродвигателя М1 соединены соответственно с соответствующим выходным концом трех регуляторов KP11, KP21 и KP31 напряжения статора в первом модуле 1.1 регулировки напряжения статора; и три ротора первого электродвигателя М1 соединены соответственно с тремя входными концами выпрямителя Z1 в первом модуле 3.1 регулировки скорости. Аналогично три статора N-го электродвигателя MN соединены соответственно с соответствующим выходным концом трех регуляторов KP1N, KP2N и KP3N напряжения статора в N-м модуле 1.N регулировки напряжения статора; и три ротора N-го электродвигателя MN соединены соответственно с тремя входными концами выпрямителя ZN в N-м модуле 3.N регулировки скорости (ротора). [0045] Как показано на фиг. 3, узел 3 регулировки скорости ротора содержит множество модулей регулировки скорости (ротора), с первого модуля 3.1 по N-й модуль 3.N регулировки скорости ротора.
[0046] Как показано на фиг. 3 первый модуль 3.1 регулировки скорости ротора снабжен выпрямителем Z1, прерывателем IGBT1, устройством UR1 защиты от перенапряжения, вентильной группой D11, D21, D31 и фильтрующим конденсатором С71. Имеется датчик Н11 напряжения на основе эффекта Холла, который установлен на трех входных концах выпрямителя Z1 и на трехфазных линиях питания трех роторов первого электродвигателя М1. Имеется датчик Н21 тока на основе эффекта Холла, который установлен между катодом вентиля D11 и анодом Q1 вентиля D21. Имеется датчик Н31 тока на основе эффекта Холла, который установлен между анодом Q1 вентиля и верхней точкой S1 устройства UR1 защиты от перенапряжения. Имеется датчик Н41 тока на основе эффекта Холла, который установлен между анодом Q1 вентиля D21 и анодом ТС1 прерывателя IGBT1.
[0047]Аналогично, как показано на фиг. 3, N-й модуль 3.N регулировки скорости ротора снабжен выпрямителем Z1, прерывателем IGBTN, устройством UR1 защиты от перенапряжения, вентильной группой D1N, D2N, D3N и фильтрующим конденсатором C7N. Имеется датчик H1N напряжения на основе эффекта Холла, который установлен на трех входных концах выпрямителя Z1 и на трехфазных линиях питания трех роторов N-го электродвигателя MN. Имеется датчик H2N тока на основе эффекта Холла, который установлен между катодом вентиля DN и анодом QN вентиля D2N. Имеется датчик H3N тока на основе эффекта Холла, который установлен между анодом QN вентиля и верхней точкой SN устройства защиты от перенапряжения. Имеется датчик H4N тока на основе эффекта Холла, который установлен между анодом QN вентиля D2N и анодом TCN прерывателя IGBTN. Узел 3 регулировки скорости ротора предназначен для детектирования напряжения ротора и тока прерывателя в качестве управляющих сигналов входного напряжения, а также для настройки входной мощности посредством управления входным напряжением, так чтобы обеспечить изменение входной мощности при изменении скорости вращения.
[0048] Как показано на фиг.4, узел 4 инверторного моста содержит: реактор L1; группы КР4 и КР7, КР5 и КР8, КР6 и КР9 кремниевых управляемых выпрямителей; резисторные группы R4 и R7, R5 и R8, R6 и R9; и конденсаторные группы С8, С9 и С14, С15; С10, С11 и С16, С17; С12, С13 и С18, С19; при этом точка Н реактора L1 соединена с анодами группы КР4, КР5, КР6 кремниевых управляемых выпрямителей, в то время как соединительные точки групп КР4 и КР7, КР5 и КР8, КР6 и КР9 кремниевых управляемых выпрямителей соединены с выводами А, В и С трехфазной электрической сети питания соответственно. Узел 4 инверторного моста используется для выпрямления сигналов переменного тока, которые имеют разную частоту и являются выходными сигналами роторов каждого работающего электродвигателя, в сигналы постоянного тока, а затем для инвертирования сигналов постоянного тока в сигналы переменного тока с той же частотой и фазой, как в электрических сетях, а также для подачи электроэнергии сигналов переменного тока обратно в электрическую сеть или в электродвигатели.
[0049] Как показано на фиг.4, узел 5 управления и приведения в действие содержит множество модулей управления и приведения в действие, с первого модуля 5.1 управления и приведения в действие по N-й модуль 5.N управления и приведения в действие.
[0050] Первый модуль 5.1 управления и приведения в действие снабжен микропроцессором U31, усилительным устройством U41 и запускающим устройством U51. 10-й контакт и 11-й контакт микропроцессора U31 соединены с 15-м контактом и с 14-м контактом усилительного устройства U41, соответственно. 3-й контакт усилительного устройства U41 и затвор TG1 прерывателя IGBT1 в первом модуле 3.1 регулировки скорости ротора соединены в третьей точке F. 20-й контакт микропроцессора соединен с 11-м контактом запускающего устройства U51, и 3-й, 4-й, 5-й, 6-й, 7-й, 8-й контакты запускающего устройства U51 соединены, в свою очередь, непосредственно с каждым соответствующим контактом AF1, АК1, BG1, ВК1, CG1, СК1 в первом модуле 1.1 регулировки напряжения статора.
[0051] Как показано на фиг.4, N-й модуль 5.N управления и приведения в действие снабжен микропроцессором U3N, усилительным устройством U4N и запускающим устройством U5N. 10-й контакт и 11-й контакты микропроцессора USN соединены, соответственно, с 15-м и 14-м контактами усилительного устройства U4N. 3-й контакт усилительного устройства U4N и затвора TGN прерывателя IGBTN в первом модуле 3.N регулировки скорости ротора соединены с четвертой точкой G. 20-й контакт микропроцессора соединен с 11-м контактом запускающего устройства U5N, и 3-й, 4-й, 5-й, 6-й, 7-й, 8-й контакты запускающего устройства U5N соединены, в свою очередь, непосредственно с каждой соответствующей точкой AGN, AKN, BGN, BKN, CGN, CKN в первом модуле 1.N регулировки напряжения статора. Узел 5 управления и приведения в действие используется для приема цифровых сигналов от узла 6 обработки сигнала, для выполнения цифровой обработки сигнала, для усиления сигналов и для управления и приведения в действие, для выполнения управления в реальном времени узлом регулировки напряжения статора и узлом регулировки скорости ротора, а также для осуществления в реальном времени управления с целью изменения входной мощности в зависимости как от нагрузки, так и от скорости вращения.
[0052] Как показано на фиг.4, узел 6 обработки сигнала содержит множество модулей обработки сигнала, с первого модуля 6.1 обработки сигнала по N-й модуль 6.N обработки сигнала.
[0053] Первый модуль 6.1 обработки сигнала снабжен сигнальным процессором U11 и аналого-цифровым преобразователем U21, причем аналого-цифровой преобразователь U21 соединен с микропроцессором U31 первого модуля 5.1 управления и приведения в действие.
[0054] N-й модуль 6.N обработки сигнала снабжен сигнальным процессором UN и аналого-цифровым преобразователем U2N, причем аналого-цифровой преобразователь U2N соединен с микропроцессором U3N первого модуля 5.N управления и приведения в действие.
[0055] Фазное напряжение U1 каждых двух фаз в трех статорах первого электродвигателя М1 и напряжение UI1 постоянного тока, что конвертировано из фазного тока каждой отдельной фазы трех статоров первого электродвигателя М1, подаются соответственно на 1-й контакт и 2-й контакт входного конца сигнального процессора U11 первого модуля 6.1 обработки сигнала.
[0056] Фазное напряжение UN каждых двух фаз в трех статорах первого электродвигателя MN и напряжение UIN постоянного тока, что конвертировано из фазного тока каждой отдельной фазы трех статоров первого электродвигателя MN подаются соответственно на 1-й контакт и 2-й контакт входного конца сигнального процессора U1N первого модуля 6.N обработки сигнала.
[0057] Фазное напряжение U1 каждых двух фаз в трех статорах первого электродвигателя М1 и фазное напряжение UN каждых двух фаз в трех статорах N-го электродвигателя MN подаются соответственно на 3-й контакт входного конца сигнального процессора U11 в первом модуле 6.1 обработки сигнала и на 3-й контакт сигнального процессора U1N в N-м модуле 6.N обработки сигнала.
[0058] Как показано на фиг.3 и фиг.4, напряжения UDI1 и UDIN постоянного тока, которые соответственно конвертированы из выходного постоянного тока выпрямителя Z1 в первом модуле 3.1 регулировки скорости ротора и выходного постоянного тока выпрямителя ZN в N-м модуле 3.N регулировки скорости ротора, подаются на 4-й контакт входного конца сигнального процессора U11 в первом модуле 6.1 обработки сигнала и на 4-й контакт входного конца сигнального процессора U1N в N-м модуле 6.N обработки сигнала, соответственно.
[0059] Как показано на фиг.3 и фиг.4, напряжения UDY1 и UDYN постоянного тока, которые соответственно конвертированы из тока, протекающего через устройство UR1 перенапряжения в первом модуле 3.1 регулировки скорости ротора и из тока, протекающего через устройство URN защиты от перенапряжения в N-м модуле 3.N регулировки скорости ротора, соответственно подаются на 5-й контакт входного конца сигнального процессора U11 в первом модуля 6.1 обработки сигнала и на 5-й контакт входного конца сигнального процессора U1N в N-м модуле 6.N обработки сигнала.
[0060] Напряжения постоянного тока UTI1 и UTIN, которые соответственно конвертированы из тока, протекающего через прерыватель IGBT1 первого модуля 3.1 регулировки скорости ротора и из тока, протекающего через прерыватель IGBTN в N-м модуле 3.N регулировки скорости ротор подаются, соответственно, на 6-й контакт входного конца сигнального процессора U11 в первом модуле 6.1 обработки сигнала и на 6-й контакт входного конца сигнального процессора U1N в N-м модуле 6.N обработки сигнала.
[0061] Катод вентиля D31 в первом модуле 3.1 регулировки скорости ротора и катод вентиля D3N в N-м модуле 3.N регулировки скорости ротора соединены в первой точке D с входным концом реактора L1 в узле 4 инверторного моста.
[0062] Катод ТЕ1 прерывателя IGBT1 в первом модуле 3.1 регулировки скорости ротора и катод TEN прерывателя IGBTN в N-м модуле 3.N регулировки скорости ротора соединены во второй точке Е с соответствующими катодами группы КР7, КР8, КР9 кремниевых управляемых выпрямителей в узле 4 инверторного моста, первым контактом усилительного устройства U41 первого модуля 5.1 управления и приведения в действие и первым контактом усилительного устройства U4N в N-м модуле 5.N управления и приведения в действие.
[0063] Номер модели, параметры и функция главных устройств в каждом узле изобретения следующие:
[0064]G1-GN с номером модели WB9128 являются датчиками коэффициента мощности и предназначены для измерения фазного напряжения и фазного токового сигнала статоров электродвигателя.
[0065] КР11-КР31 или KP1N-KP3N с номером модели КР500 300A/1800V двунаправленного кремниевого управляемого выпрямителя является группой регуляторов напряжения статора, которая предназначена для настройки напряжения статора электродвигателя.
[0066] Н11 или H1N с номером модели VSM025A является датчиком напряжения на основе эффекта Холла, который предназначен для детектирования напряжения ротора, соответствующего скорости вращения ротора электродвигателя.
[0067] Н31 или H3N с номером модели QDC21LTA является датчиком тока утечки на основе эффекта Холла, который предназначен для детектирования сигнала перенапряжения в шине постоянного тока, создаваемого током утечки, который протекает через пьезорезистор устройства UR1 или URN защиты от перенапряжения.
[0068] Н21, Н41 или H2N, H4N с номером модели CSM300LT являются датчиками тока на основе эффекта Холла, который предназначен для измерения соответствующего тока в кабеле постоянного тока и для измерения тока преобразователя.
[0069JIGBT1 или IGBTN с номером модели GD300HFL120C2S является прерывателем, который предназначен для настройки тока ротора, т.е. скорости вращения электродвигателя.
[0070] КР4-КР9 с номером модели КР500, 300/1800V являются кремниевыми управляемыми выпрямителями, которые предназначены для формирования инверторного моста, который подает энергию постоянного тока обратно в электросеть или в электродвигатели.
[0071] U31 или U3N с номером модели ATMEGA64 является микропроцессором, который предназначен для получения сигнала состояния системы, выполнения обработки данных, выдачи команды и обеспечения сигнала управления системой.
[0072] U41 или U4N с номером модели ЕХ841 является усилительным устройством, которое предназначено для получения сигнала микропроцессора, генерирования широтно-модулированного сигнала (ШИМ-сигнала), необходимого для прерывателя, с обеспечением тем самым настройки скорости вращения электродвигателя.
[0073] U51 или U5N с номером модели LSJK-T3SCRH является запускающим устройством, которое предназначено для приема команды микропроцессора, генерирования запускающего сигнала, необходимого для двунаправленного кремниевого управляемого выпрямителя регулятора напряжения статора, с обеспечением тем самым настройки напряжения статора.
[0074] U11 или U1N с номером модели LМ258 является сигнальным процессором, который предназначен для сбора сигналов, детектированных каждым датчиком системы и основного сигнала управления напряжением в реальном масштабе времени, переработкой этих сигналов в аналоговые сигналы, с последующим преобразованием аналоговых сигналов посредством аналого-цифрового преобразователя в цифровые сигналы, которые могут быть обработаны микропроцессором.
[0075] Все остальные детали выпускаются промышленным способом и являются взаимозаменяемыми.
[0075] Приведенные выше варианты являются лишь предпочтительными вариантами осуществления изобретения, которые приведены для иллюстрации технических характеристик и возможности осуществления изобретения, без ограничения патентных притязаний. При этом на основе приведенного выше описания специалист в данной области техники сможет понять и осуществить заявленное изобретение. Таким образом, патентные притязания распространяются также на все эквивалентные варианты или модификации в рамках объема, определенного формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕАЛИЗАЦИИ ИЗМЕНЕНИЯ ЧАСТОТЫ И РЕГУЛИРОВАНИЯ СКОРОСТИ РОТОРА АСИНХРОННО И ОДНОВРЕМЕННО С ПРИВОДОМ НЕСКОЛЬКИХ ЭЛЕКТРОДВИГАТЕЛЕЙ ОДНИМ ИНВЕРТОРОМ | 2008 |
|
RU2488215C2 |
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА ДЛЯ ТУРБИНЫ/ГЕНЕРАТОРА ПЕРЕМЕННОГО ТОКА НА ОБЩЕМ ВАЛУ | 1997 |
|
RU2224352C2 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| Тяговый инвертор электрогрузовика | 2024 |
|
RU2825486C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2361357C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2017 |
|
RU2656866C1 |
| Тяговый инвертор электромобильного транспорта | 2024 |
|
RU2824653C1 |
| СИСТЕМА И СПОСОБ ПАРАЛЛЕЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПИТАНИЕМ ДЛЯ ПРЕОБРАЗОВАТЕЛЕЙ СОБСТВЕННЫХ НУЖД МОТОРВАГОННОЙ СЕКЦИИ ПОЕЗДА ПРИ НАЛИЧИИ СОЕДИНИТЕЛЬНЫХ ЛИНИЙ | 2014 |
|
RU2609537C1 |
| Асинхронный электропривод для грузоподъемного механизма | 1986 |
|
SU1451829A1 |
| Высоковольтный вентильный электродвигатель | 1985 |
|
SU1309239A1 |


Изобретение относится к области электротехники и может быть использовано для приведения в действие группы электродвигателей. Технический результат - обеспечение регулирования мощности в зависимости от мгновенного изменения нагрузки и мгновенного изменения скорости вращения каждого работающего электродвигателя электрической приводной системы и эффективной экономии энергии. Система управления для изменения входной мощности одновременно с нагрузкой и скоростью вращения посредством инверторного моста, движущего несколько групп двигателей, содержит: узел (1) регулировки напряжения статора; узел (2) электродвигателей; узел (3) регулировки скорости ротора; узел (4) инверторного моста; узел (5) управления и приведения в действие; узел (6) обработки сигнала. За счет установки датчика коэффициента мощности обеспечено получение фазового напряжения и фазового тока в качестве управляющего сигнала для регулировки входного напряжения так, чтобы оно менялось вместе с нагрузкой. При этом за счет установки датчика напряжения и датчика тока обеспечено отдельное получение фазового напряжения двигателя, выходного тока выпрямителя, тока устройства защиты от перенапряжения и рабочего тока прерывателя в качестве управляющего сигнала для регулировки входного напряжения так, чтобы оно менялось вместе со скоростью вращения. Тем самым обеспечивается изменение входной мощности вместе с нагрузкой и скоростью вращения. 9 з.п. ф-лы, 4 ил.
1. Система управления для изменения входной мощности в зависимости от нагрузки и от скорости вращения при приведении в действие группы электродвигателей посредством одного инверторного моста, содержащая: узел (1) регулировки напряжения статора; узел (2) электродвигателей; узел (3) регулировки скорости ротора; узел (4) инверторного моста; узел (5) управления и приведения в действие; и узел (6) обработки сигнала, причем:
узел (1) регулировки напряжения статора содержит множество модулей регулировки напряжения статора, с первого модуля (1.1) регулировки напряжения статора по N-й модуль (1.N) регулировки напряжения статора;
узел (2) электродвигателей содержит множество электродвигателей, с первого электродвигателя (М1) по N-й электродвигатель (MN);
узел (3) регулировки скорости ротора содержит множество модулей регулировки скорости ротора, с первого модуля (3.1) по N-й модуль (3.N) регулировки скорости ротора;
узел (4) инверторного моста содержит: реактор L1; группы KP4 и KP7, KP5 и KP8, KP6 и KP9 кремниевых управляемых выпрямителей; резисторные группы R4 и R7, R5 и R8, R6 и R9; конденсаторные группы С8, С9 и С14, С15; С10, С11 и С16, С17; С12, С13 и С18, С19; причем точка Н реактора L1 соединена с анодом групп KP4, KP5 и KP6 кремниевых управляемых выпрямителей, в то время как соединительная точка групп KP4 и KP7 кремниевых управляемых выпрямителей, соединительная точка групп KP5 и KP8 кремниевых управляемых выпрямителей и соединительная точка групп KP6 и KP9 кремниевых управляемых выпрямителей соединены с соответствующими выводами А, В и С трехфазной электрической сети;
узел (5) управления и приведения в действие содержит множество модулей управления и приведения в действие, с первого модуля (5.1) управления и приведения в действие по N-й модуль (5.N) управления и приведения в действие; и
узел (6) обработки сигнала содержит множество модулей обработки сигнала, с первого модуля (6.1) обработки сигнала по N-й модуль (6.N) обработки сигнала.
2. Система по п. 1, причем:
первый электродвигатель М1 содержит три статора;
первый модуль (1.1) регулировки напряжения статора снабжен группой KP11, KP21 и KP31 регуляторов напряжения статора, резисторной группой R11, R21, R31 и конденсаторной группой С11, С21, С31, С41, С51 и С61; причем группа регуляторов напряжения статора, резисторная группа и конденсаторная группа разделены на три блока, так что первый блок содержит KP11, R11, С11, С21, второй блок содержит KP21, С21, С31, С41, и третий блок содержит KP31, R31, С51, С61; причем входные концы указанных трех блоков соединены с соответствующими тремя фазами ABC сети электропитания, в то время как их выходные концы соединены с соответствующими тремя статорами первого электродвигателя М1; при этом на трехфазных линиях электропитания, соединенных с тремя статорами, предусмотрен датчик G1 коэффициента мощности;
N-й модуль (1.N) регулировки напряжения статора снабжен группой KP1N, KP2N, KP3N регуляторов напряжения статора, резисторами R1N, R2N, R3N и конденсаторными группами C1N, C2N, C3N, C4N, C5N, C6N; причем группа регулировки напряжения статора, резисторная группа и конденсаторная группа разделены на три блока, так что первый блок содержит KP1N, R1N, C1N, C2N, второй блок содержит KP2N, C2N, C3N, C4N, и третий блок содержит KP3N, R3N, C5N, C6N; причем входные концы указанных трех блоков соединены с соответствующими тремя фазами ABC сети электропитания, в то время как выходные концы указанных трех блоков соединены с соответствующими тремя статорами первого электродвигателя М1; при этом на трехфазных линиях электропитания, соединенных с тремя статорами, предусмотрен датчик GN коэффициента мощности.
3. Система по п. 1, причем:
первый электродвигатель М1 и N-й электродвигатель MN содержат каждый три статора и три ротора;
три статора первого электродвигателя М1 соединены соответственно с соответствующим выходным концом трех регуляторов KP11, KP21 и KP31 напряжения статора в первом модуле (1.1) регулировки напряжения статора, при этом три ротора первого электродвигателя М1 соединены с соответствующими тремя входными концами выпрямителя Z1 в первом модуле (3.1) регулировки скорости ротора;
три статора N-го электродвигателя MN соединены соответственно с соответствующим выходным концом трех регуляторов KP1N, KP2N и KP3N напряжения статора в N-м модуле (1.N) регулировки напряжения статора, при этом три ротора N-го электродвигателя MN соединены с соответствующими тремя входными концами выпрямителя ZN в N-м модуле (3.N) регулировки скорости ротора.
4. Система по п. 1, причем:
первый электродвигатель М1 и N-й электродвигатель MN содержат каждый три ротора;
первый модуль (3.1) регулировки скорости снабжен выпрямителем Z1, прерывателем IGBT1, устройством UR1 защиты от перенапряжения, вентильной группой D11, D21, D31 и фильтрующим конденсатором С71; на трех входных концах выпрямителя Z1 и на трехфазных линиях электропитания трех роторов первого электродвигателя М1 предусмотрен датчик Н11 напряжения на основе эффекта Холла; между катодом вентиля D11 и анодом Q1 вентиля D21 предусмотрен датчик Н21 тока на основе эффекта Холла; между анодом Q1 вентиля и верхней точкой S1 устройства UR1 защиты от перенапряжения предусмотрен датчик Н31 тока на основе эффекта Холла; и между анодом Q1 вентиля D21 и анодом ТС1 прерывателя IGBT1 предусмотрен датчик Н41 тока на основе эффекта Холла;
N-й модуль (3.N) регулировки скорости ротора снабжен выпрямителем ZN, прерывателем IGBTN, устройством URN защиты от перенапряжения, вентильной группой D1N, D2N, D3N и фильтрующим конденсатором C7N; на трех входных концах выпрямителя ZN и на трехфазных линиях электропитания трех роторов N-го электродвигателя MN предусмотрен датчик H1N напряжения на основе эффекта Холла; между катодом вентиля DN и анодом QN вентиля D2N предусмотрен датчик H2N тока на основе эффекта Холла; между анодом QN вентиля и верхней точкой SN устройства защиты от перенапряжения предусмотрен датчик H3N тока на основе эффекта Холла; и между точкой анода QN вентиля D2N и анодом TCN прерывателя IGBTN предусмотрен датчик H4N тока на основе эффекта Холла.
5. Система по п. 1, причем:
первый модуль (5.1) управления и приведения в действие снабжен микропроцессором U31, усилительным устройством U41 и запускающим устройством U51; причем 10-й контакт и 11-й контакт микропроцессора U31 соединены соответственно с 15-м контактом и 14-м контактом усилительного устройства U41; 3-й контакт усилительного устройства U41 и затвор TG1 прерывателя IGBT1 в первом модуле 3.1 регулировки скорости ротора соединены с третьей точкой F; причем 20-й контакт микропроцессора соединен с 11-м контактом запускающего устройства U51, и 3-й, 4-й, 5-й, 6-й, 7-й, 8-й контакты запускающего устройства U51 соединены непосредственно с каждой соответствующей точкой AG1, AK1, BG1, BK1, CG1, CK1 в первом модуле 1.1 регулировки напряжения статора;
N-й модуль (5.N) управления и приведения в действие снабжен микропроцессором U3N, усилительным устройством U4N и запускающим устройством U5N; причем 10-й контакт и 11-й контакт микропроцессора U3N соединены соответственно с 15-м контактом и 14-м контактом усилительного устройства U4N; причем 3-й контакт усилительного устройства U4N и затвор TGN прерывателя IGBTN1 в первом модуле (3.N) регулировки скорости ротора соединены с четвертой точкой G; причем 20-й контакт микропроцессора соединен с 11-м контактом запускающего устройства U5N, и 3-й, 4-й, 5-й, 6-й, 7-й, 8-й контакты запускающего устройства U5N соединены непосредственно с каждой соответствующей точкой AGN, AKN, BGN, BKN, CGN, CKN в первом модуле 1.N регулировки напряжения статора.
6. Система по п. 1, причем:
первый модуль (6.1) обработки сигнала снабжен сигнальным процессором U11 и аналого-цифровым преобразователем U21, причем аналого-цифровой преобразователь U21 соединен с микропроцессором U31 в первом модуле управления и приведения в действие;
N-й модуль (6.N) обработки сигнала снабжен сигнальным процессором U1N и аналого-цифровым преобразователем U2N, причем аналого-цифровой преобразователь U2N соединен с микропроцессором U3N в первом модуле (5.1) управления и приведения в действие.
7. Система по п. 1, причем:
первый электродвигатель М1 и N-й электродвигатель MN содержат каждый три статора;
фазное напряжение Uϕ1 любых двух фаз в трех статорах первого электродвигателя М1 и напряжение UI1 постоянного тока, конвертированное из фазного тока любой фазы в трех статорах первого электродвигателя М1, подаются соответственно на 1-й контакт и 2-й контакт входного конца сигнального процессора U11 первого модуля (6.1) обработки сигнала;
фазное напряжение UϕN любых двух фаз в трех статорах N-го электродвигателя MN и напряжение UIN постоянного тока, конвертированное из фазового тока любой фазы в трех статорах первого электродвигателя MN, подаются соответственно на 1-й контакт и 2-й контакт входного конца сигнального процессора U1N N-го модуля (6.N) обработки сигнала; и
фазное напряжение U1 любых двух фаз в трех статорах первого электродвигателя М1 и фазное напряжение UN любых двух фаз в трех статорах N-го электродвигателя MN подаются соответственно на 3-й контакт входного конца сигнального процессора U11 в первом модуле (6.1) обработки сигнала и 3-й контакт сигнального процессора U1N N-го модуля (6.N).
8. Система по п. 1, причем:
напряжения UDI1 и UDIN постоянного тока, конвертированные соответственно из выходного постоянного тока выпрямителя Z1 в первом модуле (3.1) регулировки скорости ротора и выходного постоянного тока выпрямителя ZN в N-м модуле (3.N), подаются соответственно на 4-й контакт входного конца сигнального процессора U11 в первом модуле (6.1) обработки сигнала и 4-й контакт входного конца сигнального процессора U1N в N-м модуле (6.N) обработки сигнала.
9. Система по п. 1, причем:
напряжения UDY1 и UDYN постоянного тока, конвертированные соответственно из тока, протекающего через устройство UR1 защиты от перенапряжения в первом модуле (3.1) регулировки скорости ротора, и тока, протекающего через устройство URN защиты от перенапряжения в N-м модуле (3.N) регулировки скорости ротора, подаются соответственно на 5-й контакт входного конца сигнального процессора U11 в первом модуле (6.1) обработки сигнала и на 5-й контакт входного конца сигнального процессора U1N в N-м модуле (6.N) обработки сигнала; и
напряжения UTI1 и UTIN постоянного тока, конвертированные соответственно из тока, протекающего через прерыватель IGBT1 в первом модуле (3.1) регулировки скорости ротора, и тока, протекающего через прерыватель IGBTN в N-м модуле (3.N) регулировки скорости ротора, подаются соответственно на 6-й контакт входного конца сигнального процессора U11 в первом модуле (6.1) обработки сигнала и на 6-й контакт входного конца сигнального процессора U1N в N-м модуле (6.N) обработки сигнала.
10. Система по п. 1, причем:
катод вентиля D31 в первом модуле (3.1) регулировки скорости ротора и катод вентиля D3N в N-м модуле (3.N) регулировки скорости ротора соединены в первой точке D с входным концом реактора L1 в узле 4 инверторного моста;
катод ТЕ1 прерывателя IGBT1 в первом модуле (3.1) регулировки скорости ротора и катод TEN прерывателя IGBTN в N-м модуле (3.N) регулировки скорости ротора соединены во второй точке Е с соответствующими катодами группы KP7, KP8, KP9 кремниевых управляемых выпрямителей в узле (4) инверторного моста, первым контактом усилительного устройства U41 в первом модуле (5.1) управления и приведения в действие и первым контактом усилительного устройства U4N в N-м модуле (5.N) управления и приведения в действие.
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Многодвигательный асинхронный электропривод | 1977 |
|
SU699642A1 |
| JP 2005341799 A, 08.12.2005 | |||
| US 20100033123 A1, 11.02.2010 | |||
| CN 101262192 A, 10.09.2008. | |||

