I
Изобретение относится к области автоматизированного электропривода, преимущественно общепромышленных механизмов: кранов, конвейеров, экскаваторов и т. а.
Известен многодвигательный асинхронный электропривод с согласованным вращением двигателей за счет электрической связи роторов по цепи выпрямленного тока, в котором содержатся неуправляемые трехфазные выпрямители, включенные в цепь ротора каждого двигателя, причем выходы выпрямителей соединены параллельно и замкнуты через резистор l.
Недостатком известного устройства является невозможность поддержания заданной скорости вращения при широком изменении нагрузки на валу двигателей.
Наиболее близким по технической сущности к предложенному изобретению является многодвигательный электропривод, содержащий асинхронные двигатели с фазным ротором, неуправляемые трехфазные
выпрямители, включенные в цепь ротора, рричем выходы параллельно замкнуты через последовательно соединенные дроссель и импульсный регулятор тока, параллельно которому включены последовательно соединенные конденсатор и резистор, а управляющий вход импульсного регулятора тока соединен с блоком управления, вход которого соединен с блоком задания скорости вращения и с блоком выделения тока нагруженного двигателя, вход которого подключен к датчикам токов в цепи ротора каждого двигателя Z.
Недостатком известного устройства является малый диапазон регулирования скорости вращения двигателей.
Цель изобретения - расширение диапазона регулирования скорости вращения двигателей.
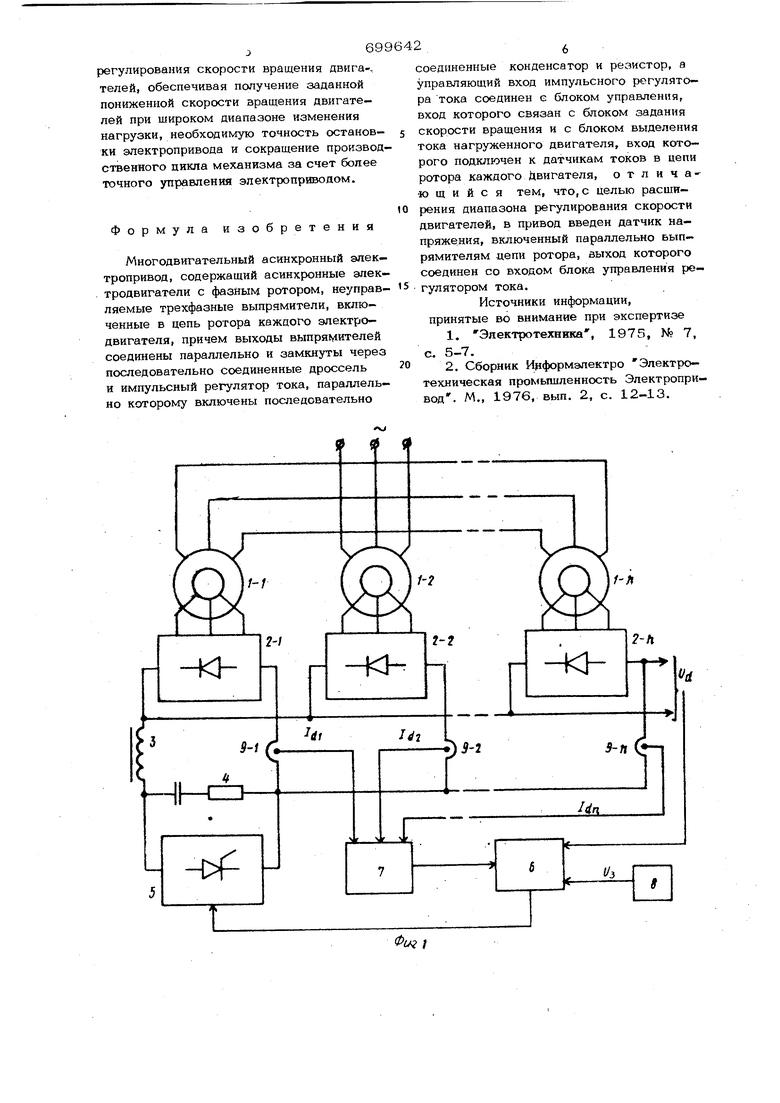
Поставленная цель достигается гем, что в привод введен датчик напряжения включенный параллельно выпpямнтeля цепи ротора, выход которого соедине : со входом блока управления регулятором тока. Включение регулятора в общую для двигателей цепь и использование для получения жесткой характеристики обратной «вязи по напряжению ротора упрощает также техническое решение задачи автоматической передачи роли ведущего двигателя от одного двигателя к другому, что оказывается необходимым в ряде слу Установлено, что при работе такого электропривода на наиболее низкой скорости максимальный момент ведомых двигателей лишь «езначительно превышает момент ведущего двигателя. В связи с этим, с целью расширения рабочего диапазона по мсаленту, ведушим делается наиболее нагруженный двигатель. В случаях, когда в процессе работы наиболее нагруженным двигателем может оказаться любой из них, роль ведущего двигателя автоматически передается наиболее нагруженному двигателю, выделяемом с помощью блока выделения тока нагруженного двигателя. Сущность изобретения поясняется чертежами, где на фиг. 1 представлена прин ципиальная схема многодвигательного асинхронного электропривода с включение роторных цепей через неуправляемые тре фа;шые мостовые выпрямители на импуль сный регулятор с обратной связью по ЭДС рсугора ведущего двигателя; на фиг. 2 « статические характеристики электропривода. Многодвигательный электропривод состоит из И асинхронных двигателей: 1-1, 1-2, . . . , 1 -П (фиг. 1), в роторные цепи которых включены неуправляемые трехфазные мостовые выпрямители: 2-1, 2-2, . . ., 2- п. Выходы выпрямителей подключены параллельно друг другу и замкнуты череа дроссель 3, цепь 4 и импульсный регулятор тока 5. Управляющий вход импульсного регулятора тока 5 соединен с блоком управления 6, вход которого соединен с блоком выделения тока 7 нагруженного двигателя и с блоком задания скорости вращения 8 Вход блока выделения тока 7 нагруженно го двигателя соединен с датчиками токов 9-1, 9-2, . . ., 9-h. Датчик напряжения 10, включенный параллельно выпрямителям 2, соединен со входом блока управления 6. Для получения заданной пониженной скорости двигателей в блок управления тиристорным коммутатором 6 подается задающий .сигнал V , определяющий скорость, с которой начинает действовать обратная связь по напряжению ротора от датчика напряжения 10. С началом действия обратной связи по напряжению ротора, что соответствует скорости (1 (фиг. 2), наперед заданная скважность тиристорного коммутатора 5 начинает изменяться в сторону его закрывания. При скорости ведущего двигателя 41)2 ристорный коммутатор 5 полностью закрывается, что соответствует введению в цепь выпрямленного тока ротора сопротивления, равного бесконечности, и работе двигателей на оси .скоростей с моментом равным нулю. Таким образом, на интервале изменения скорости ведущего двигателя от (i) до LU формируется его жесткая характеристика А с заданной пониженной скоростью. Скорость ведомых двигателей определяется xiapaK- теристиками В, С, Д, и т. д., пересекающими характеристику А. Допустим, ведущий двигатель работает в точке в с моментом на валу М/n . Тогда рабочие точки ведомых двигателей располагаются на характеристике С в соответствии с величиной момента сопротивлений на валу каждого из них. Максимальный момент, который может развивать любой из ведомых двигателей при неизменном моменте на валу ведущего двигателя, равен моменту стопорения ,, незначительно превышающему момент ведущего двигателя М « .С увеличением нагрузки на валу ведущего двигателя момент стопорения ведомых двигателей также увеличивается. Отсюда вытекает вывод о необходимости делать ведущим наиболее нагруженный двигатель, увеличивая тем самым перегрузочную способность ведомых двигателей. Если в процессе работы наиболее нагруженным двигателем может быть.любой из них, то блок выделения тока 7 нагруженного двигателя пропускает в блок управления 6 тиристорным комму- татором 5 сигнал обратной связи по выпрямленному току ротора только наиболее нагруженного двигателя. В результате этого в процессе работы роль ведущего двигателя автоматически переходит к любому из двигателей, если он оказывается наиболее нагруженным. Многодвигательный асинхронный элек- тропривод обладает широким диапазоном регулирования скорости вращения двига-, телей, обеспечивая получение заданной пониженной скорости вращения двигателей при широком диапазоне изменения нагрузки, необходимую точность остановки электропривода и сокращение производ ственного цикла механизма за счет более точного управления электроприводом. Формула изобретения Многодвигательный асинхронный электропривод, содержащий асинхронные электродвигатели с фазным ротором, неуправляемые трехфазные выпрямители, включенные в цепь ротора каждого электродвигателя, причем выходы выпрямителей соединены параллельно и замкнуты через последовательно соединенные дроссель и импульсный регулятор тока, параллельно которому включены последовательно соединенные конденсатор и резистор, а управляющий вход импульсного регулятора тока соединен с блоком управления, вход которого связан с блоком задания скорости вращения и с блоком выделения тока нагруженного двигателя, вход которого подключен к датчикам токов в цепи ротора каждого Двигателя, о т л и ч а ю щ и и с я тем, что, с целью расширения диапазона регулирования скорости двигателей, в привод введен датчик напряжения, включенный параллельно выпрямителям депи ротора, выход которого соединен со входом блока управления регулятором тока. Источники информации, принятые во внимание при экспертизе 1.Эпектротехника, 1975, № 7, с. 5-7. 2.Сборник Информэлектро Электротехническая промышленность Электропривод. М., 1976, вып. 2, с. 12-13.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод переменного тока | 1980 |
|
SU1023609A1 |
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| Многодвигательный асинхронный электропривод | 1981 |
|
SU1001414A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Многодвигательный электропривод переменного тока поточных линий | 1988 |
|
SU1601731A1 |
| Электропривод | 1988 |
|
SU1684902A1 |
| Стенд для испытания передач | 1983 |
|
SU1096516A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |

(Ог ttij 4/. 2 f cmoni
