Область техники
Данное изобретение относится к системе изменения частоты и регулирования скорости ротора электродвигателя, в частности к системе реализации изменения частоты и регулирования скорости ротора асинхронно и одновременно с приводом нескольких электродвигателей одним инвертором.
Уровень техники
Электродвигатель является основным приводом грузоподъемного крана, вентилятора и водяного насоса, он может преобразовывать электрическую энергию в механическую. Приведем грузоподъемный кран в качестве примера, электродвигатель может привести грузовой кран в движение для подъема или спуска, движения вперед и назад, поворота и перемещения для операций с грузом на рабочем месте.
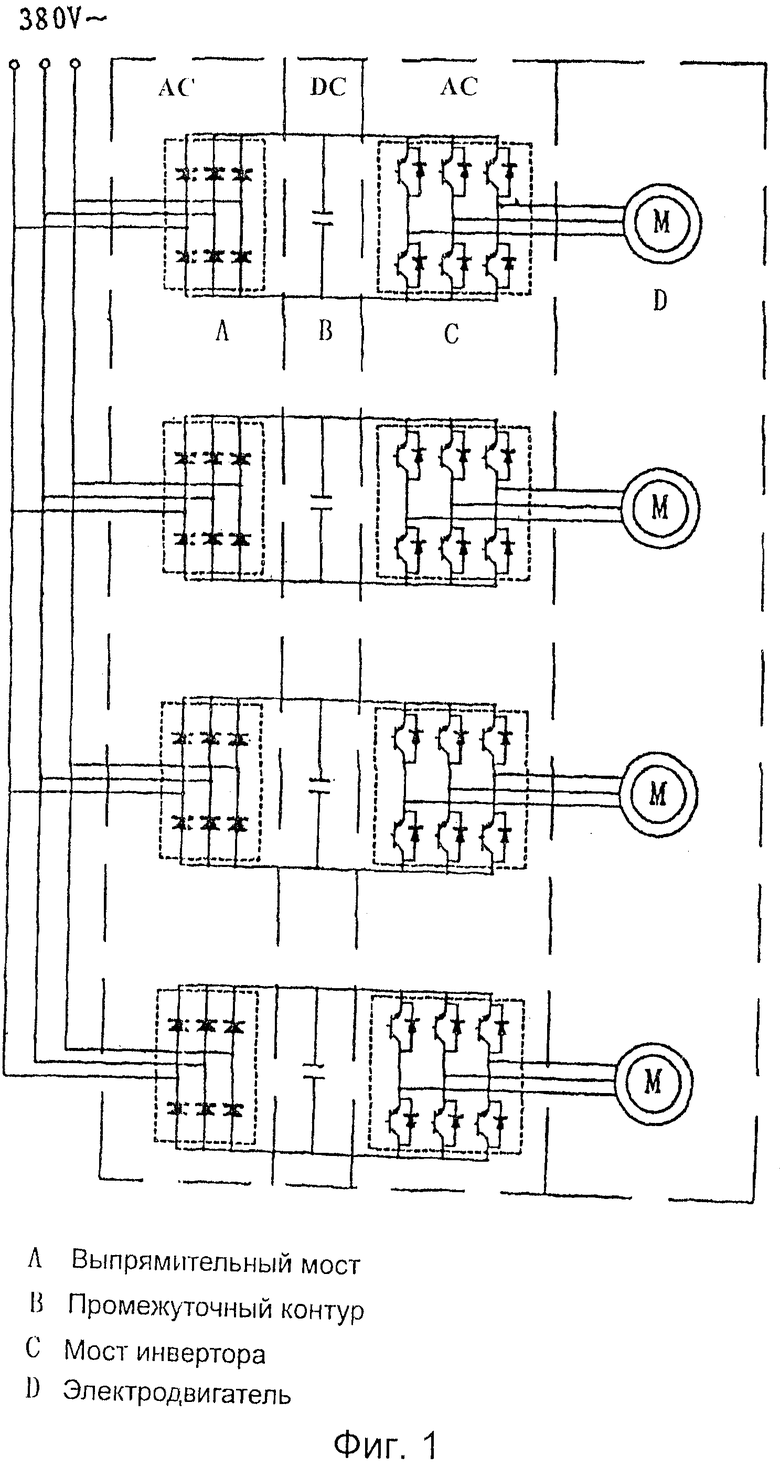
На Фиг.1 представлена схема традиционного регулирования переменной частотой скорости грузоподъемного крана с разными электродвигателями. На данном изображении видно, что данная система преобразует переменный ток с постоянным напряжением и постоянной частотой в постоянный ток через выпрямительный мост, потом через промежуточную цепь с помощью инвертора преобразует постоянный ток в переменный ток с разными рабочими частотами для того, чтобы заставить электродвигатель вращаться.
Допустим: частота источника электричества электросети fo, рабочая частота электродвигателя является fm.
Тогда fm=ξfo,
здесь: ξ - коэффициент скольжения.
На рабочем месте грузоподъемный кран обычно должен выполнить четыре разные операции: подъем, движение вперед-назад, поворот и перемещение, поэтому для разных исполнительных механизмов требуются разные электродвигатели для того, чтобы получить разные механические усилия, преобразованные из электрической энергии. То есть для разных операций грузоподъемного крана требуются разные скорости вращения электродвигателя, таким образом рабочая частота электродвигателя fm оказывается разной. Но в традиционной системе изменения частоты и регулирования скорости электродвигателя один инвертор может преобразовать рабочую частоту только одного электродвигателя, и изменить частоту и преобразовать скорость только одного электродвигателя, так называемая схема "один инвертор - один привод", так что нужно четыре инвертора для выполнения преобразования переменного ток в постоянный и наоборот, чтобы создать разные частоты для разных электродвигателей, и отдельно выполнить подъем, движение вперед-назад, поворот и перемещение грузоподъемного крана на рабочем месте.
Из вышесказанного мы можем сделать вывод, что в традиционной системе изменения частоты и регулирования скорости электродвигателя имеется широкий спектр регулирования частоты, не зависящий от частоты электросети, при этом имеется возможность преобразования усилия или преобразования нагрузки. В данной системе при низкой скорости потеря скольжения большая и эффективность низкая, в частности, нужно четыре инвертора, таким образом, система получается большой, громоздкой и дорогой, поэтому она очень неудобна в эксплуатации.
В последние годы с быстрым развитием технологий изменения частоты, особенно с применением технологий векторного управления и технологий прямого управления вращающего момента, технология изменения частоты становится более зрелой, она занимает первое место в трансмиссиях с переменным током со своим широким спектром регулирования скорости, высокой точностью стабилизации скорости, быстрым динамическим реагированием и возможностью обратного движением в прямоугольной координатной системе, ее возможности по регулированию скорости соответствуют возможностям трансмиссии с постоянным током, даже имеется тенденция заменить последнюю. Однако за рубежом в технологиях изменения частоты грузоподъемного крана используют один конвертор для одной функции, один инвертор для одного конвертора частоты, для нормальной работы грузоподъемного груза нужно четыре инвертора. Если добавить функцию обратной связи по питанию, то нужно еще четыре инвертора, очевидно, что это не удобно. Таким образом, соответствующая продукция иностранных компаний по-прежнему использует образ "один инвертор - один привод" для нормальной работы грузового крана. Например, японский YASKAWA, немецкий Siemens, шведский ABB и французский Schneider широко используют в соответствующей области в Китае, и цена их очень высокая.
Для преодоления серьезных недостатков вышеперечисленных существующих технологий автор провел ряд исследований, как использовать один инвертор для привода четырех электродвигателей, чтобы реализовать регулирование скорости ротора переменной частотой путем подключения и отключения прерывателей, чтобы грузовой кран мог выполнять четыре действия - подъем, движение вперед-назад, поворот и перемещение - в режиме реального времени, когда инвертор находится в положении минимального угла преобразования. Но остаются нерешенными вопросы, как обеспечить необходимое регулирование, как снять междуфазное напряжение ротора и обеспечить, чтобы постоянный ток на выходе выпрямителя создавал управление сеточным током с помощью прерывателя, как обеспечить нормальную работу системы и рациональную работу электродвигателя по номинальной частоте.
Суть изобретения
Первая задача данного изобретения заключается в том, чтобы создать систему, обеспечивающую изменение частоты и регулирование скорости ротора, асинхронно и одновременно приводя в действие несколько электродвигателей одним инвертором с полным мостом. То есть при онлайн-управлении несколькими электродвигателями, один инвертор выдает выходное напряжение в качестве обратной электродвижущей силы каждого работающего электродвигателя, чтобы привести в действие каждый прерыватель в режиме реального времени, чтобы несколько электродвигателей работали асинхронно и одновременно.
Вторая задача данного изобретения заключается в том, чтобы создать систему, обеспечивающую изменение частоты и регулирование скорости ротора, асинхронно и одновременно приводя в действие несколько электродвигателей одним инвертором с полумостом. То есть при онлайн-управлении несколькими электродвигателями, один инвертор выдает выходное напряжение в качестве обратной электродвижущей силы каждого работающего электродвигателя, чтобы привести в действие каждый прерыватель в режиме реального времени, чтобы несколько электродвигателей работали асинхронно и одновременно.
Третья задача заключается в том, чтобы данная система обладала функцией повторного использования энергии для сбережения энергоресурсов.
Четвертая задача заключается в том, чтобы реализовать регулирование скорости ротора переменной частотой, причем с активным преобразованием с полным мостом или активным преобразованием с полумостом.
Для того чтобы решить вышеуказанные задачи, данное изобретение использует следующие технические решения.
Система изменения частоты и регулирования скорости ротора асинхронно и одновременно с приводом нескольких электродвигателей одним инвертором содержит:
одну группу электродвигателей, включая четыре электродвигателя: M1, М2, М3 и M4, для того, чтобы асинхронно и одновременно грузовой кран выполнял подъем, движение вперед-назад, поворот и перемещение;
одну группу выпрямителей, включая четыре выпрямительных моста: Z1, Z2, Z3 и Z4 для выпрямления сигналов переменного тока на разных частотах, снимаемых с роторов электродвигателей, соединенных с ними;
одну группу токоограничителей, содержащую два токоограничителя: L7 и L8 для обеспечения мгновенного тока для нормальной работы системы;
одну группу прерывателей, включая четыре прерывателя: IGBT1, IGBT2, IGBT3 и IGBT4, для обеспечения непрерывной регулировки постоянного тока путем регулировки проводимости каждого прерывателя, что позволяет непрерывно регулировать ток ротора электродвигателя, чтобы обеспечить возможность регулирования скорости ротора переменной частотой. Надо отметить, что когда проводимость прерывателя достигает 100%, то скорость вращения электродвигателя является номинальной скоростью;
одну группу диодов, содержащую восемь диодов: D1, D2, D3, D4, D5, D6, D7 и D8, чтобы обеспечить непрерывность при минимальном рабочем токе и обеспечить нормальную работу системы;
один инвертор с полным мостом или один инвертор с полумостом для преобразования переменного тока с разными частотами на выходе ротора каждого электродвигателя в постоянный ток, который потом преобразуется в источник электричества с той же частотой и той же фазой, что и промышленный источник переменного тока, для реализации преобразования переменного тока в постоянный и наоборот, и возращения энергии электродвигателю или в электросети.
Одна группа детекторов напряжения обратной связи по току содержит четыре детектора напряжения: U11, U12, U13 и U14, которые распложены параллельно сопротивлениям, через которые протекает обратный ток в вышеуказанном выпрямительном мосту, и предназначены для обнаружения соответствующих постоянных обратных токов и преобразования их в напряжение и подачи на входные точки соответствующих процессоров.
Одна группа детекторов напряжения обратной связи по скорости содержит четыре детектора напряжения: Uv1, Uv2, Uv3 и Uv4, которые распложены между любыми двумя линиями вышеуказанных роторов электродвигателей для обнаружения переменного напряжения разных частот между любыми двумя линиями электродвигателей и преобразования их в постоянное напряжение и подачи их на входные точки соответствующих процессоров.
В данном изобретении на основе использования теории технологии инверсного управления при онлайн-управлении несколькими электродвигателями согласно номинальной мощности электродвигателя, напряжение из инвертора с полным мостом или из инвертора с полумостом используют в качестве дополнительной обратной электродвижущей силы для электродвигателей с разными функциями, при этом реализуют асинхронное и одновременное управление каждым электродвигателем посредством работы прерывателей каждого электродвигателя в режиме реального времени, что обеспечивает подъем, движение вперед-назад, поворот и перемещение грузовых кранов.
В данном изобретении, когда грузовой кран работает на подъем, благодаря тому, что ротор электродвигателя соединен с активной обратной системой, лишняя электрическая энергия всегда возвращается к электродвигателям или электросети через инвертор, а когда грузоподъемный кран находится в режиме опускания груза, то возбуждение постоянного тока поступает на две фазы статора электродвигателя, таким образом, электродвигатель становится генератором и находится в положении выработки электроэнергии, а произведенная электроэнергия возвращается к электродвигателям или электросети через инвертор, чтобы обеспечить возвращение энергии и эффективно сберегать энергию.
В данном изобретении в системах большой мощности используют систему с полным мостом для реализации изменения частоты и регулирования скорости ротора асинхронно и одновременно с приводом нескольких электродвигателей одним инвертором; а в системах средней мощности или малой мощности используют схему с полумостом для регулирования изменения частоты и скорости ротора асинхронно и одновременно с приводом нескольких электродвигателей одним инвертором. Для изменения рабочего состояния снимают фазовое напряжение роторов электродвигателей, постоянного тока выпрямителя и напряжение, выданное пользователем, и проводят обработку в режиме реального времени управляющим центром на микропроцессоре, работающим под управлением установленной извне главной программы, что позволяет обеспечить эффективное управление включением и выключением каждого прерывателя для регулирование скорости ротора электродвигателей переменной частотой.
С помощью дополнительной вспомогательной электрической цепи с подходящей поддержкой программным обеспечением можно обеспечить автоматическую защиту, ограничение нагрузки с отображением состояния и диалога оператора и оборудования, контроль аварийных ситуаций, ограничение превышения скорости, ограничение фазы и защиту от нехватки напряжения, скорости ветра, реализовать высокоинтеллектуальное управление в режиме реального времени, обеспечивать безопасность и надежность системы.
Данное изобретение обладает такими особенностями, как простая цепь, маленький объем, низкая цена, высокая надежность и экономия энергии.
Краткое описание чертежей
Фиг.1 показывает схему системы изменения частоты и регулирования скорости ротора, используя разные электродвигатели для разных действий в традиционном грузовом кране.
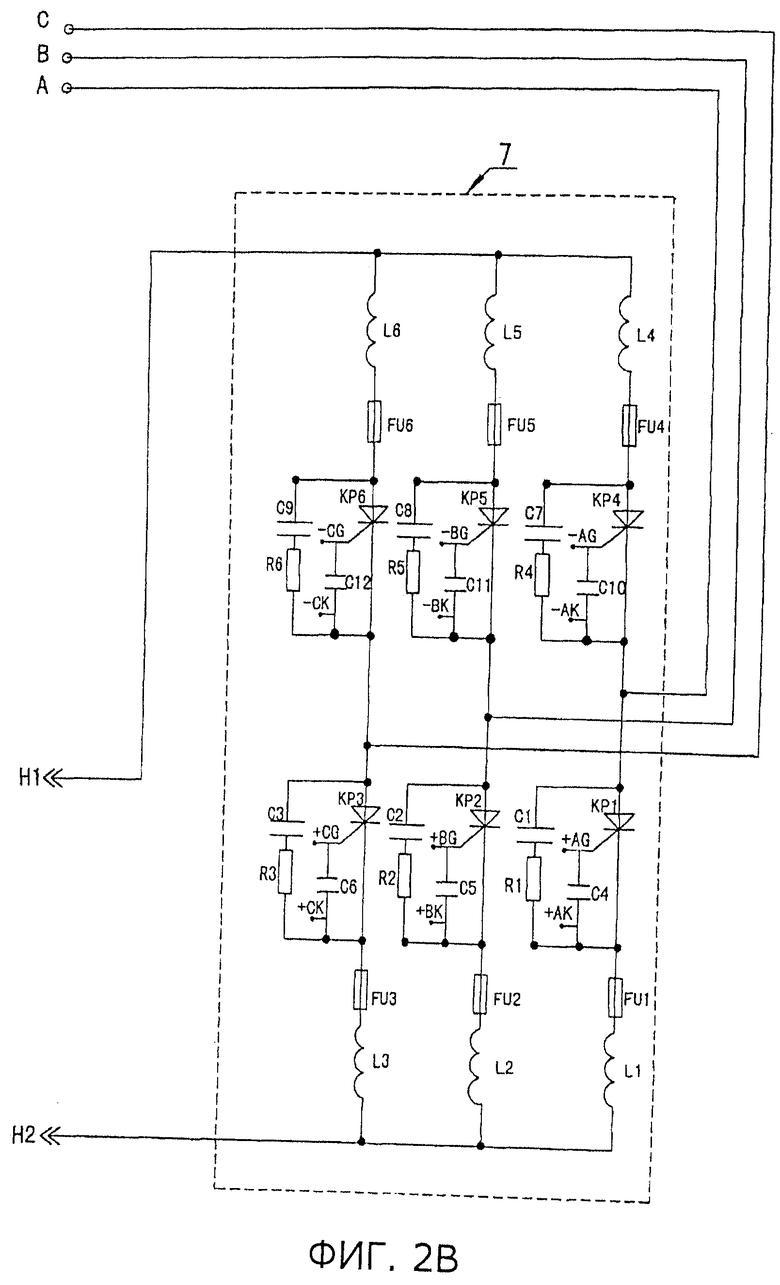
Фиг.2А и 2В представляет собой изображение электрической схемы системы, обеспечивающей изменение частоты и регулирование скорости ротора асинхронно и одновременно с приводом нескольких электродвигателей одним инвертором с использование инвертора с полным мостом в первом варианте данного изобретения и с приводом нескольких электродвигателей инвертором с полумостом во втором варианте использования.
Условные обозначения на изображениях:
1. Группа электродвигателей: M1, М2, М3 и M4;
2. Группа выпрямителей: Z1, Z2, Z3 и Z4
3. Группа прерывателей: IGBT1, IGBT2, IGBT3 и IGBT4;
4. Группа диодов: D1, D2, D3, D4, D5, D6, D7 и D8;
5. Группа токоограничителей; L7 и L8;
6. Группа конденсаторов: С13, С14, C15 и C16;
7. Инверторы: инвертор с полным мостом - KP1, КР2, КР3, КР4, KP5 и КР6; инвертор с половиной моста: КР1, KP2 и КР3;
8. Группа детекторов напряжения обратной связи по скорости: UV1, UV2, UV3 и UV4 ;
9. Группа детекторов напряжения обратной связи по току: U11, U12, U13 и U14.
Пример конкретной реализации:
На фиг.2А и 2В показан первый и второй наилучшие примеры реализации данного изобретения.
На фиг.2 видно, что первый пример реализации в данном изобретении содержит группу электродвигателей 1, группу выпрямителей 2, группу прерывателей 3, группу диодов 4, группу токоограничителей 5, группу конденсаторов 6, инвертор 7, группу детекторов 8 напряжения обратной связи по скорости, группы детекторов 9 напряжения обратной связи по току, в том числе:
Роторы электродвигателей M1, М2, М3 и M4 группы электродвигателей 1 соединены с соответствующими входными точками выпрямителей Z1, Z2, Z3 и Z4 группы выпрямителей 2.
Катоды Е прерывателей IGBT1, IGBT2, IGBT3 и IGBT4 группы прерывателей 3 соединены с анодом трех выпрямительных диодов прерывателей Z1, Z2, Z3 и Z4 группы выпрямителей 2, то есть точкой D.
Инвертор 7 представляет собой инвертор с полным мостом и содержит шесть управляемых кремниевых ключей, то есть KP1, КР2, КР3, КР4, КР5 и KP6, в том числе три выходные точки KP1 и КР4, КР2 и KP5, КР3 и КР6 соответственно соединены с точками А, В, С трехфазного промышленного переменного источника электричества, потом соединены со статорами электродвигателей M1, М2, М3 и М4 группы электродвигателей 1.
Группа диодов 4 содержит восемь диодов, то есть D1, D2, D3, D4, D5, D6, D7 и D8, кроме того, D1 и D5, D2 и D6, D3 и D7, D4 последовательно соединены друг с другом.
В том числе, аноды диодов D1, D2, D3 и D4 соответственно соединены с выходными точками резисторов R1, R2, R3 и R4, и IGBT1, IGBT2, IGBT3, с анодами C прерывателей IGBT4.
Катоды диодов D5 и D6 соединены с входной точкой токоограничителя L7 группы токоограничителей 5; катоды диодов D7 и D8 соединены с входной точкой токоограничителя L8 группы токоограничителей 5.
Точки соединения последовательно соединенных диодов D1 и D5, D2 и D6, D7, D4, D4 и D8 отдельно соединены с концом конденсаторов C13, C14, С15 и С16 группы конденсаторов 6, что образует Т-образную конструкцию.
Группа конденсаторов 6 содержит четыре конденсатора, то есть C13, C14, С15 и С16, их другие концы соединены с катодами Е обрезателей IGBT1, IGBT2, IGBT3 и IGBT4 группы прерывателей 3, то есть с точкой D.
Группа токоограничителей 5 содержит два индукционных токоограничителя, то есть L7 и L8, выходная точка индукционного токоограничителя L7 соединена с нулевым концом N трехфазного промышленного переменного источника электричества; а выходная точка индукционного токоограничителя L8 соединена с концом индукционного токоограничителя L4, L5 и L6 инвертора 7.
На фиг.2А и 2В видно, что во втором примере данное изобретение состоит из группы электродвигателей 1, группы выпрямителей 2, группы прерывателей 3, группы диодов 4, группы токоограничителей 5, группы конденсаторов 6, инвертора 7, группы детекторов 8 напряжения обратной связи по скорости, группы детекторов 9 напряжения обратной связи по току, в том числе:
роторы электродвигателей M1, M2, М3 и М4 группы электродвигателей 1 соединены с соответствующими входными концами выпрямителей Z1, Z2, Z3 и Z4 группы детекторов 2;
катоды Е прерывателей группы прерывателей 3 IGBT1, IGBT2, IGBT3 и IGBT4 соответственно соединены с анодами соответственно выпрямительных диодов выпрямителей Z1, Z2 Z3 и Z4 группы выпрямителей 2, то есть с точкой D;
инвертор 7 представляет собой инвертор с полумостом и содержит три управляемых кремниевых ключа, то есть КР1 КР2, и КР3, их катоды соответственно последовательно соединены с индукционными приборами L1, L2 и L3 через плавкие предохранители FU1, FU2 и FU3, образованные цепи соединены с катодами Е обрезателей IGBT1, IGBT2, IGBT3 и IGBT4 агрегата обрезателей 3 через другой конец индукционных приборов L1, L2 и L3 и с другими концами конденсаторов С13, C14, C15 и C16 группы конденсаторов 6, то есть с точкой D.
Инвертор 7 представляет собой инвертор с полумостом и содержит три управляемых кремниевых ключа, то есть KP1, КР2, КР3, их аноды соответственно соединены с точками А, В, С трехфазного промышленного переменного источника электричества, потом соединены со статорами электродвигателей M1, M2, М3 и М4 группы электродвигателей 1.
Выходной конец индукционного токоограничителя L7 группы токоограничителей 5 соединен с нулевым концом N промышленного переменного источника электричества, что образует трехфазный нулевой активный инверсный мост.
Вышеприведенные примеры объясняют технические характеристики и реализацию данного изобретения. Надо отметить, что данное изобретение может быть не только использовано для подъема или спуска, движения вперед и назад, поворота и перемещения грузового крана, но в любой ситуации, когда нужно в режиме реального времени одновременно и асинхронно управлять приводом нескольких электродвигателей. Например, управление при разной температуре и влажности в текстильном цехе в текстильной промышленности; управление при разном течении и разной скорости течения в гидравлической станции; соединение стальных досок, соединение конструктивных элементов, движение и поворот корпуса кораблей, сварка подвешенных тяжелых деталей в кораблестроении; навесная сборка в целом масштабных строений и монтаж в целом нефтехимического оборудования. Поэтому любая цепь и способ управления любым знакомым навыком включены в суть данного изобретения. Признаки данного изобретения раскрыты в формуле изобретения и в ее эквивалентах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ИЗМЕНЕНИЯ ВХОДНОЙ МОЩНОСТИ ОДНОВРЕМЕННО С НАГРУЗКОЙ И СКОРОСТЬЮ ВРАЩЕНИЯ ПРИ ПРИВЕДЕНИИ В ДЕЙСТВИЕ ГРУППЫ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСРЕДСТВОМ ОДНОГО ИНВЕРТОРНОГО МОСТА | 2012 |
|
RU2574035C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2361357C2 |
| АСИНХРОННЫЙ ТЯГОВЫЙ ПРИВОД ЭЛЕКТРОПОЕЗДА | 2004 |
|
RU2299512C2 |
| САМОХОДНАЯ МАШИНА С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ И СИСТЕМОЙ ОТБОРА МОЩНОСТИ | 2020 |
|
RU2726814C1 |
| Устройство для регулирования скорости асинхронного электродвигателя с фазным ротором | 1970 |
|
SU502469A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2237345C2 |
| РЕКУПЕРИРУЮЩИЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА С ДВУХЗВЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2014 |
|
RU2584002C1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1982 |
|
SU1241391A1 |
| Электропривод переменного тока | 1986 |
|
SU1317628A1 |
| Электропривод переменного тока | 1986 |
|
SU1431025A1 |
Изобретение относится к области электротехники и может быть использовано для изменения частоты и регулирования скорости ротора нескольких электродвигателей, приводимых одним инвертором. Технический результат - упрощение, уменьшение веса, стоимости, повышение надежности и экономия энергии. Система реализации изменения частоты и регулирования скорости содержит группу электродвигателей, группу выпрямителей, группу прерывателей, группу диодов, группу токоограничителей, группу конденсаторов, полный мост или полумост, группу детекторов напряжения обратной связи по скорости, группу детекторов напряжения обратной связи по току. Используя теорию инверсного управления, напряжение на выходе инвертора с полным мостом или с полумостом используют в качестве дополнительной обратной электродвижущей силы для электродвигателей с разными функциями согласно номинальной мощности двигателя, причем используют разные прерыватели для приведения электродвигателей в работу асинхронно и одновременно, реализуя подъем, движение вперед и назад, поворот и перемещение грузового крана. Когда грузовой кран поднимает груз, то лишняя электрическая энергия возвращается электродвигателю через инвертор; когда грузовой кран опускает груз, то электродвигатель вырабатывает электричество, которое поступает в инвертор напряжения для возврата энергии. 2 н. и 5 з.п. ф-лы, 3 ил.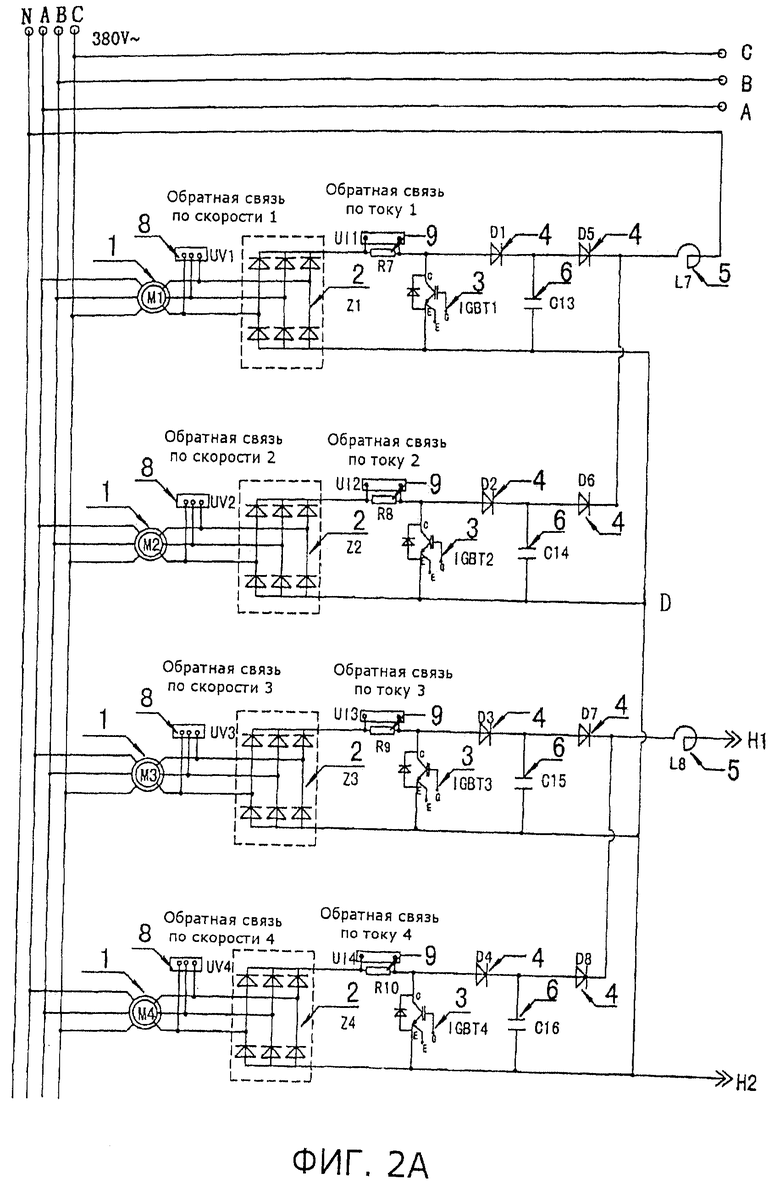
1. Система реализации изменения частоты и регулирования скорости ротора асинхронно и одновременно с приводом нескольких электродвигателей одним инвертором, состоящая из группы электродвигателей (1), группы выпрямителей (2), группы прерывателей (3), группы диодов (4), группы токоограничителей (5), группы конденсаторов (6), инвертора (7), группы детекторов (8) напряжения обратной связи по скорости, группы детекторов (9) напряжения обратной связи по току; причем
роторы электродвигателей M1, М2, М3 и М4 группы электродвигателей (1) соединены с соответствующими входными точками выпрямителей Z1, Z2, Z3, и Z4, группы выпрямителей (2),
катоды Е четырех прерывателей IGBT1, IGBT2, IGBT3 и IGBT4 группы прерывателей (3) соединены с анодами трех соответствующих выпрямляющих диодов выпрямителей Z1, Z2, Z3, и Z4 группы выпрямителей (2), то есть с точкой D;
отличающаяся тем, что
инвертор (7) представляет собой инвертор с полным мостом и содержит шесть управляемых кремниевых ключей КР1, КР2, КР3, КР4, КР5 и КР6, причем три выходные точки КР1 и KP4, KP2 и КР5, КР3 и КР6 соответственно соединены с точками А, В, С трехфазного промышленного переменного источника электричества, потом соединены со статорами электродвигателей M1, М2, М3 и М4 группы электродвигателей (1), причем
группа диодов (4) содержит восемь диодов, то есть D1, D2, D3, D4, D5, D6, D7 и D8, кроме того, D1 и D5, D2 и D6, D3 и D7, D4 и D8 последовательно соединены друг с другом, причем соответствующие аноды диодов D1, D2, D3 и D4 соединены с соответствующими выходными точками сопротивлений R1, R2, R3 и R4, и соединены с анодами С прерывателей IGBT1, IGBT2, IGBT3 и IGBT4, где катоды диодов D5 и D6 соединены с входной точкой индукционного токоограничителя L7 группы токоограничителя (5), а катоды диодов D7 и D8 соединены с входной точкой индукционного токоограничителя L8 группы токоограничителей (5).
2. Система реализации изменения частоты и регулирования скорости ротора асинхронно и одновременно с приводом нескольких электродвигателей одним инвертором по п.1, отличающаяся тем, что точки соединения последовательно соединенных изоляторов D1 и D5, D2 и D6, D3 и D7, D4 и D8 группы диодов (4) соединены с соответствующими концами конденсаторов C13, C14, C15 и C16 группы конденсаторов (6), образуя Т-образную конструкцию.
3. Система реализации изменения частоты и регулирования скорости ротора асинхронно и одновременно с приводом нескольких электродвигателей одним инвертором по п.1, отличающаяся тем, что группа конденсаторов (6) содержит четыре конденсатора, то есть С13, С14, С15 и C16, причем их другие концы соединены с катодами Е прерывателей IGBT1, IGBT2, IGBT3 и IGBT4 группы прерывателей (3), то есть с точкой D.
4. Система реализации изменения частоты и регулирования скорости ротора асинхронно и одновременно с приводом нескольких электродвигателей одним инвертором по п.1, отличающаяся тем, что группа токоограничителей (5) содержит два индукционных токоограничителя L7 и L8, причем выходная точка индукционного токоограничителя L7 соединена с нулевым концом N трехфазного промышленного переменного источника электричества; а выходная точка индукционного токоограничителя L8 соединена с концами индукционных токоограничителей L4, L5 и L6 инвертора (7).
5. Система реализации изменения частоты и регулирования скорости ротора асинхронно и одновременно с приводом нескольких электродвигателей одним инвертором, состоящая из группы электродвигателей (1), группы выпрямителей (2), группы прерывателей (3), группы диодов (4), группы токоограничителей (5), группы конденсаторов (6), инвертора (7), группы детекторов (8) напряжения обратной связи по скорости, группы детекторов (9) напряжения обратной связи по току; причем
роторы четырех электродвигателей M1, М2, М3 и М4 группы электродвигателей (1) соединены с соответствующими входными точками четырех выпрямителей Z1, Z2, Z3, и Z4 группы выпрямителей (2), а
катоды Е четырех прерывателей IGBT1, IGBT2, IGBT3 и IGBT4 группы прерывателей (3) соединены с анодом трех выпрямляющих диодов выпрямителей Z1, Z2, Z3 и Z4 группы выпрямителей (2), то есть с точкой D, отличающаяся тем, что инвертор (7) представляет собой инвертор с полумостом и содержит три управляемых кремниевых ключа КР1, КР2 и КР3, их катоды соответственно последовательно соединены с тремя индукционными токоограничителями L1, L2 и L3, через три плавких предохранителя FU1, FU2 и FU3, образованные цепи соединены с катодами Е четырех прерывателей IGBT1, IGBT2, IGBT3 и IGBT4 группы прерывателей (3) через другой конец индукционных токоограничителей L1, L2 и L3 и с другими концами конденсаторов С13, C14, С15 и C16 группы конденсаторов (6), то есть с точкой D.
6. Система реализации изменения частоты и регулирования скорости ротора асинхронно и одновременно с приводом нескольких электродвигателей одним инвертором по п.5, отличающаяся тем, что инвертор (7) представляет собой инвертор с полумостом, аноды трех управляемых кремниевых ключей КР1, КР2, КР3 соответственно соединены с точками А, В, С трехфазного промышленного переменного источника электричества и затем соединены со статорами электродвигателей M1, М2, М3 и М4 группы электродвигателей (1).
7. Система реализации изменения частоты и регулирования скорости ротора асинхронно и одновременно с приводом нескольких электродвигателей одним инвертором по п.5, отличающаяся тем, что выходная точка индукционного токоограничителя L7 группы токоограничителей (5) соединена с нулевой точкой N промышленного переменного источника электричества, что образует структуру трехфазного нулевого активного инверторного моста.
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ГИСТЕРЕЗИСНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2003 |
|
RU2248660C1 |
| Многодвигательный электропривод переменного тока поточных линий | 1988 |
|
SU1601731A1 |
| JP 2000224860 A, 11.08.2000 | |||
| УСТАНОВКА ДЛЯ ЛОКАЛЬНОЙ ЗАКАЛКИ ОСЕЙ ТОКАМИ ВЫСОКОЙ ЧАСТОТЫ | 2010 |
|
RU2453611C1 |
| CN 201063583 Y, 21.05.2008 | |||
| WO 1988001450 A1, 25.02.1988 | |||
| WO 9506973 A1, 09.08.1995. | |||

