Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству уборки космического мусора и к способу уборки космического мусора и относится, в частности, к устройству уборки космического мусора и способу уборки космического мусора, которые подходят для уборки относительно крупного по размеру космического мусора, такого как использованный спутник или ракета, вращающиеся по орбите вокруг Земли.
Уровень техники
[0002] В настоящее время, спутники для различных целей, такие как военные спутники, спутники связи, научные спутники, спутники наблюдения и навигационные спутники вращаются по орбитам вокруг Земли. Когда спутники отказывают и становятся нефункциональными или заканчивается их эксплуатация и достигается конец их срока службы, спутники зачастую остаются на орбите, как они есть, и становятся космическим мусором. Также, обломки ракеты или т.п., использованной для запуска спутника или т.п., также остаются на орбите в качестве космического мусора. В настоящее время несколько тысяч фрагментов космического мусора и других фрагментов находятся на орбите, и началась фаза самовоспроизводства, в которой число фрагментов увеличивается за счет обычных столкновений. Для того чтобы прекратить самовоспроизводство космического мусора, по меньшей мере, около 5 фрагментов космического мусора необходимо убирать ежегодно. Космический мусор притягивается земной гравитацией и падает и, в конечном счете, исчезает, однако, падение под действием гравитации требует многих лет и является неэффективным. Таким образом, способ для положительной уборки космического мусора уже предложен (например, см. патентный документ 1 и патентный документ 2).
[0003] В способе уборки космического мусора, описанном в патентном документе 1, устройство получения давления для получения точного количества атмосферы и давления излучения солнечного света конфигурируется посредством круглого или многоугольного пленочного материала, и присоединяя устройство получения давления к космическому мусору, уже находящемуся на орбите в космосе, или к космическому кораблю, который должен быть запущен впоследствии, посредством троса, важная орбита защищается посредством падения на землю или изменения орбиты космического мусора или космического корабля после использования. Для прикрепления устройства получения давления используется способ управления гарпуном или способ прикрепления устройства получения давления роботизированной рукой.
[0004] В способе уборки космического мусора, описанном в патентном документе 2, используется устройство фала для изменения орбиты космического мусора, включающее в себя проводящий фал, который прикрепляется к космическому мусору, такому как сломанный спутник или обломок спутника или т.п. и получает усилие изменения орбиты космического мусора посредством электромагнитного взаимодействия с геомагнитным полем, устройство фала для изменения орбиты космического мусора включает в себя механизм захвата, который может захватывать структурную часть космического мусора и механизм фала, соединенный с механизмом захвата и растяжимым образом удерживающий фал, и после захвата космического мусора механизмом захвата, фал растягивается механизмом фала, роботизированная рука отделяется, и устройство фала для изменения орбиты космического мусора сбрасывается вместе с космическим мусором.
Документы предшествующего уровня техники
Патентные документы
[0005] Патентный документ 1: Опубликованная заявка на патент Японии №2010-285137.
Патентный документ 2: Патент Японии №3809524.
Раскрытие изобретения
Проблемы, решаемые изобретением
[0006] Сейчас космический мусор, как правило, движется по орбите, в то же время испытывая беспорядочное вращательное движение (кувыркающееся движение). Следовательно, то, как тормозное устройство, такое как устройство получения давления или устройство фала должно прикрепляться к такому космическому мусору, испытывающему кувыркающееся движение, становится проблемой. В частности, при использовании роботизированной руки необходимо предохранять роботизированную руку от столкновения с космическим мусором, и управление усложняется. Однако этот момент недостаточно рассмотрен в способах уборки космического мусора, описанных в патентном документе 1 и патентном документе 2.
[0007] Настоящее изобретение было реализовано, принимая во внимание проблемы, и имеет целью предоставление устройства уборки космического мусора и способа уборки космического мусора, представляющих возможность легко прикреплять тормозное устройство к космическому мусору, испытывающему кувыркающееся движение.
Средство решения проблем
[0008] Согласно настоящему изобретению, предлагается устройство уборки космического мусора, которое убирает космический мусор, испытывающий беспорядочное кувыркающееся движение, с орбиты посредством захвата и торможения космического мусора, включающее в себя двигательную установку для выполнения управления причаливанием и ориентацией на целевой мусор, который является космическим убираемым мусором, устройство захвата, имеющее гарпун, который может выбрасываться к целевому мусору, устройство наблюдения для наблюдения за движением целевого мусора и вычисления положения захвата и ориентации захвата, в которой гарпун может быть выпущен в полый фрагмент целевого мусора, тормозное устройство, непосредственно или опосредованно соединенное с гарпуном, для торможения целевого мусора, и корпусную часть, на которой двигательная установка, устройство захвата, устройство наблюдения и тормозное устройство устанавливаются.
[0009] Гарпун может включать в себя заостренную концевую часть, имеющую зубчатую часть, которая может зацепляться с целевым мусором, стопорную часть, которая должна находиться в контакте с поверхностью целевого мусора, часть формирования реактивной движущей силы для выброса гарпуна и провод для соединения гарпуна с корпусной частью.
[0010] Зубчатая часть может быть выполнена с возможностью закрывания при прохождении через целевой мусор и раскрываться после прохождения через целевой мусор.
[0011] Гарпун может быть сконфигурирован так, что предусматривается упругий корпус, расположенный так, чтобы закрывать заостренную концевую часть на передней поверхности стопорной части, и за счет сжимания упругого корпуса между поверхностью целевого мусора и стопорной частью, когда заостренная концевая часть зацепляется с целевым мусором, разбрасывание отломанных фрагментов, сформировавшихся при прохождении гарпуна насквозь, подавляется.
[0012] Множество заостренных концевых частей может быть расположено на поверхности стопорной части, и каждая из заостренных концевых частей может быть выполнена с возможностью втягивания при упирании в местоположение, в котором заостренная концевая часть не может проникнуть через поверхность целевого мусора.
[0013] Устройство намотки провода, выполненное с возможностью наматывания провода, может быть предусмотрено, и, наматывая провод после зацепления заостренной концевой части с целевым мусором, корпусная часть может быть близко подведена к целевому мусору.
[0014] Буферный материал для смягчения удара при близком подведении корпусной части к целевому мусору может быть расположен на корпусной части.
[0015] Может быть предусмотрено множество фиксирующих лапок, расположенных с возможностью вращения в корпусной части, и после того как корпусная часть близко подводится к целевому мусору, фиксирующие лапки могут быть развернуты, чтобы прикреплять корпусную часть к целевому мусору, и движение целевого мусора может быть подавлено с помощью двигательной установки.
[0016] Множество устройств захвата могут быть расположены на корпусной части.
[0017] Тормозное устройство может включать в себя проводящий фал, который должен быть сброшен в космос, и дальнюю концевую часть, расположенную на дальнем конце проводящего фала и снабженную средством формирования реактивной движущей силы для формирования реактивной движущей силы.
[0018] Тормозное устройство может включать в себя проводящий фал, который должен быть сброшен в пространство, дальнюю концевую часть, расположенную на дальнем конце проводящего фала и снабженную средством формирования реактивной движущей силы для формирования реактивной движущей силы, и разъем для присоединения заднего конца проводящего фала к проводу, и провод может соединяться с корпусной частью через проводящий фал и дальнюю концевую часть.
[0019] Проводящий фал может быть присоединен так, чтобы отделяться от корпусной части. Также, дальняя концевая часть может быть сконфигурирована посредством корпусной части.
[0020] Также, согласно настоящему изобретению, предоставляется способ уборки космического мусора, который убирает космический мусор, испытывающий беспорядочное кувыркающееся движение, с орбиты посредством захвата и торможения космического мусора, включающий в себя процесс вывода на орбиту для вывода устройства уборки космического мусора на орбиту целевого мусора, который является космическим убираемым мусором, процесс приближения для совершения приближения устройства уборки космического мусора к целевому мусору, процесс наблюдения и перемещения для наблюдения движения целевого мусора после того, как устройство уборки космического мусора достигает положения наблюдения, вычисления положения захвата и ориентации захвата, в которой гарпун может быть выпущен в целевой мусор, и перемещения устройства уборки космического мусора в положение захвата и ориентацию захвата, процесс захвата для выпуска гарпуна в целевой мусор и соединения устройства уборки космического мусора и целевого мусора и процесс торможения для торможения целевого мусора устройством уборки космического мусора.
[0021] Процесс захвата может включать в себя процесс близкого подведения для наматывания провода, соединенного с гарпуном, после того как гарпун выпущен в целевой мусор, и близкого подведения устройства уборки космического мусора к целевому мусору.
[0022] Процесс захвата может включать в себя процесс фиксации для развертывания фиксирующих лапок, расположенных на устройстве уборки космического мусора, и связывания с целевым мусором, после того как устройство уборки космического мусора близко подведено к целевому мусору, и процесс подавления движения для подавления движения целевого мусора посредством двигательной установки, расположенной в устройстве уборки космического мусора.
[0023] Процесс наблюдения и перемещения может вычислять положение захвата и ориентацию захвата так, чтобы выпустить гарпун в полый фрагмент целевого мусора.
[0024] Процесс торможения может быть процессом торможения целевого мусора посредством сброса проводящего фала из устройства уборки космического мусора в космос.
Преимущества изобретения
[0025] Согласно устройству уборки космического мусора и способу уборки космического мусора настоящего изобретения, выполняя приближение устройства уборки космического мусора к целевому мусору, вычисляя положение захвата и ориентацию захвата, в которой гарпун может быть выпущен в целевой мусор, выпуская гарпун и затем затормаживая целевой мусор, орбита целевого мусора изменяется, и целевой мусор может быть вынужден падать на Землю и исчезать. Также, гарпун может быть выпущен из положения далеко от целевого мусора, и даже когда целевой мусор испытывает кувыркающееся движение, целевой мусор может быть захвачен в состоянии, когда устройство уборки космического мусора и целевой мусор не сталкиваются, и тормозное устройство может быть легко прикреплено.
[0026] Также, посредством близкого подведения устройства уборки космического мусора к захваченному целевому мусору, провод, соединенный с гарпуном, легко не наматывается вокруг целевого мусора, испытывающего кувыркающееся движение, и рабочее состояние тормозного устройства может быть стабилизировано. Дополнительно, прикрепляя устройство уборки космического мусора к целевому мусору посредством фиксирующих лапок, кувыркающееся движение целевого мусора может быть подавлено с помощью двигательной установки, и рабочее состояние тормозного устройства может быть более стабилизировано.
Краткое описание чертежей
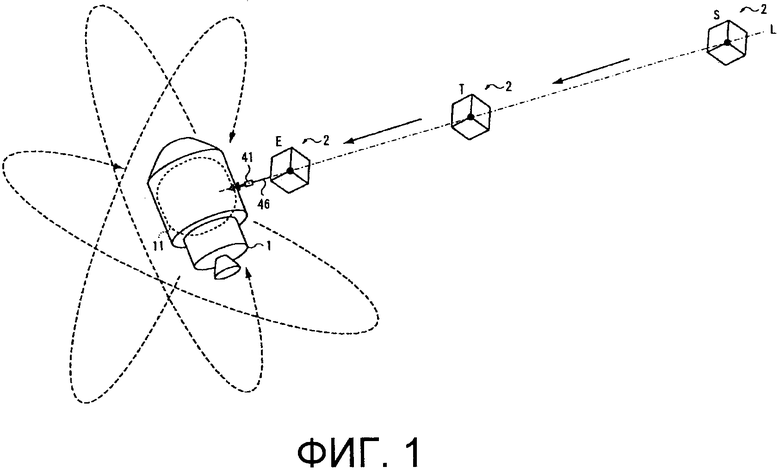
[0027] Фиг. 1 представляет собой общий схематичный чертеж, иллюстрирующий процессы от процесса вывода на орбиту до процесса захвата способа уборки космического мусора согласно первому варианту осуществления настоящего изобретения.
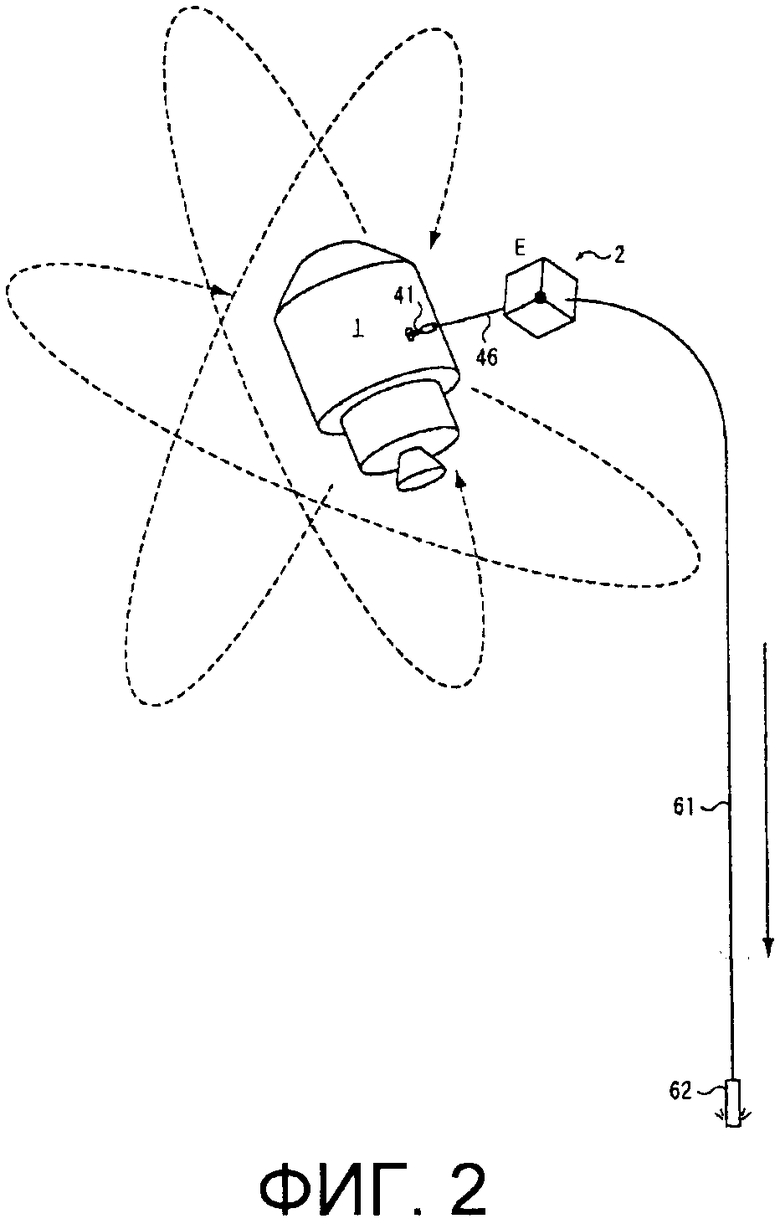
Фиг. 2 представляет собой общий схематичный чертеж, иллюстрирующий процесс торможения способа уборки космического мусора согласно первому варианту осуществления настоящего изобретения.
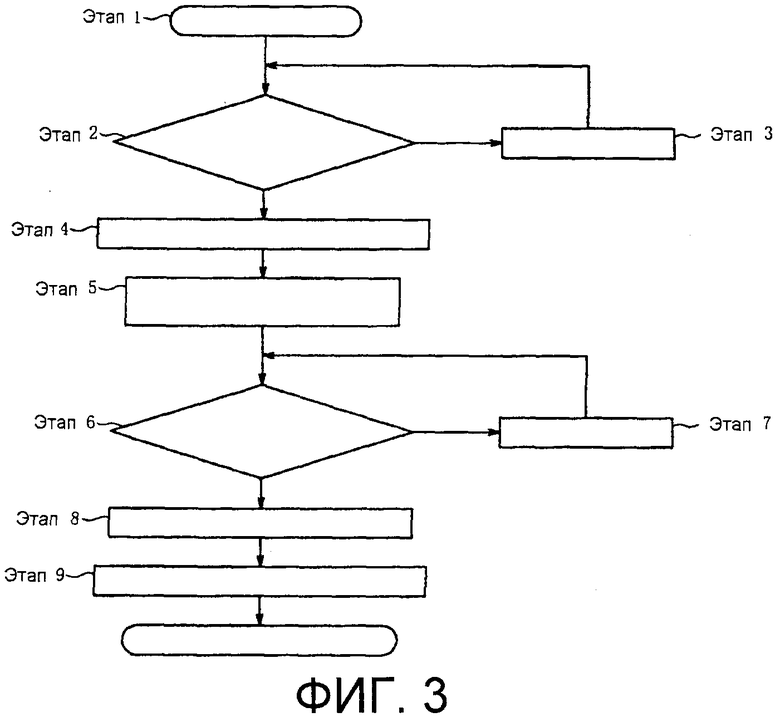
Фиг. 3 представляет собой блок-схему последовательности операций, иллюстрирующую способ уборки космического мусора согласно первому варианту осуществления настоящего изобретения.
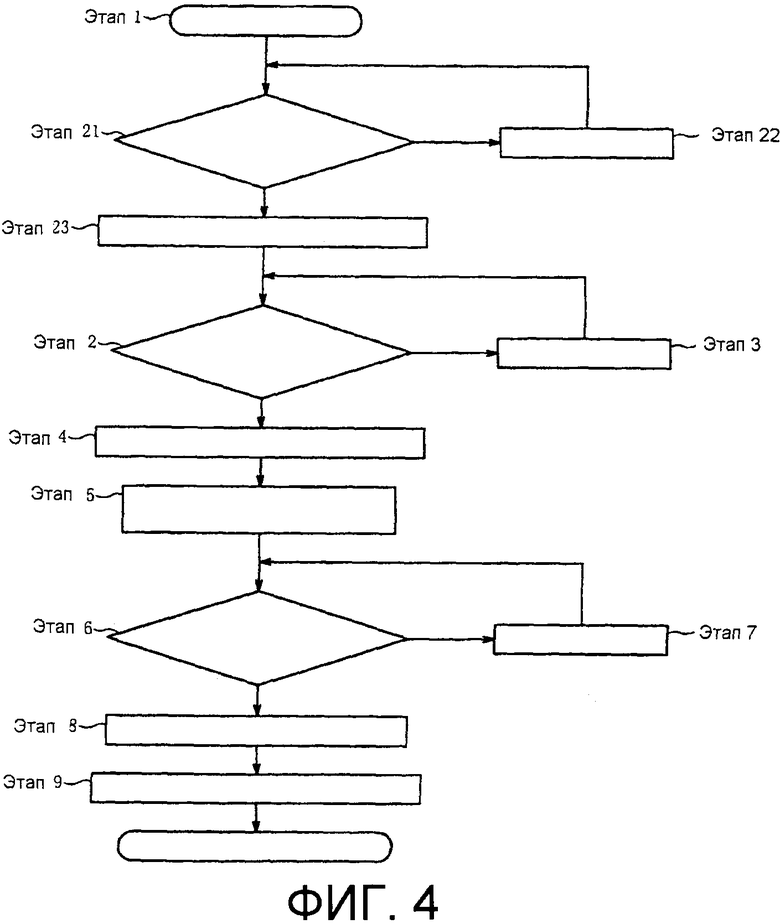
Фиг. 4 представляет собой блок-схему последовательности операций, иллюстрирующую модификацию способа уборки космического мусора согласно первому варианту осуществления настоящего изобретения.
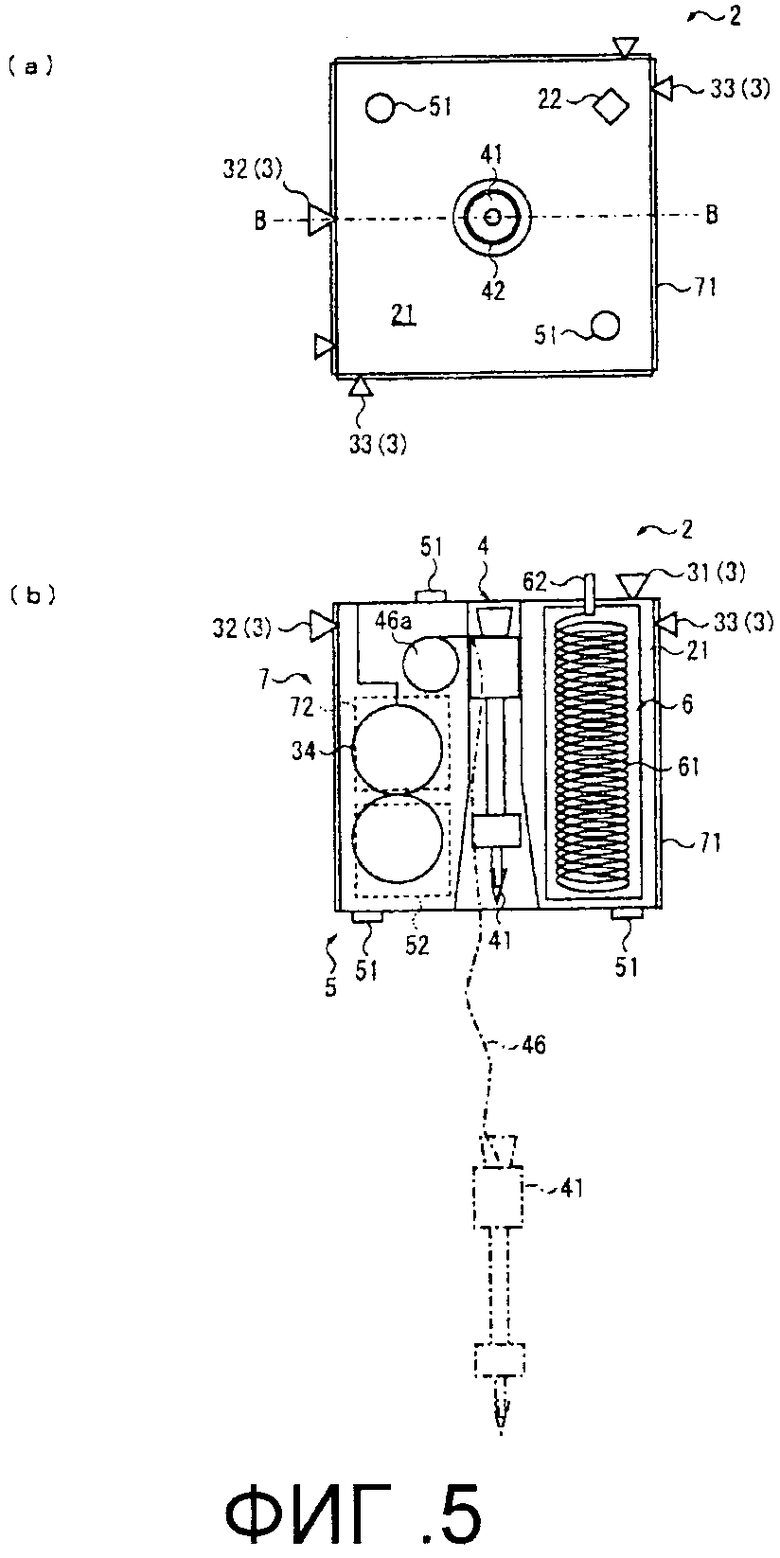
Фиг. 5 представляет собой схематичный чертеж, иллюстрирующий устройство уборки космического мусора согласно первому варианту осуществления настоящего изобретения, (а) иллюстрирует вид спереди, а (b) иллюстрирует вид в поперечном разрезе В-В на фиг. 5(a).
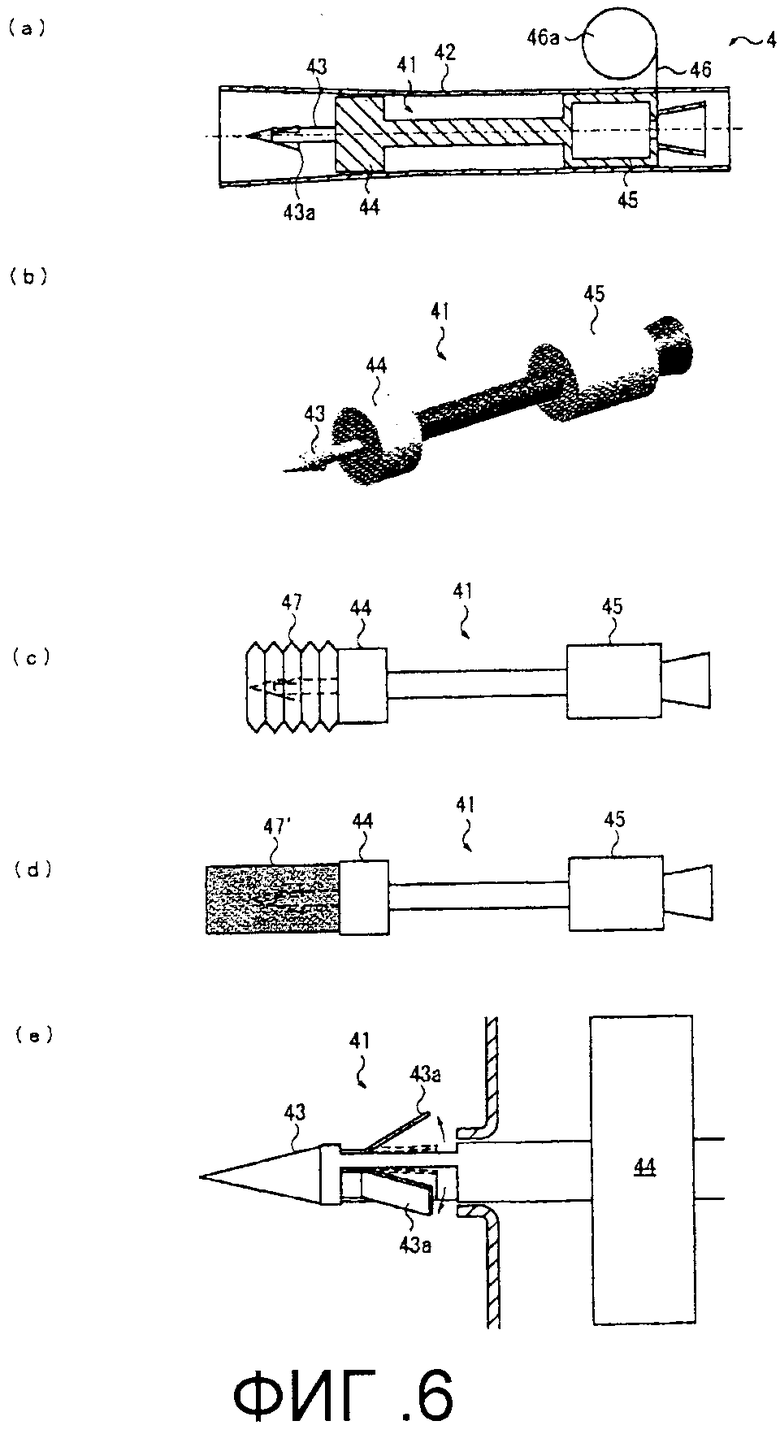
Фиг. 6 представляет собой схему, иллюстрирующую устройство захвата, (а) иллюстрирует общий схематичный чертеж, (b) иллюстрирует перспективный вид гарпуна, (с) иллюстрирует первую модификацию гарпуна, (d) иллюстрирует вторую модификацию гарпуна, а (е) иллюстрирует третью модификацию гарпуна.
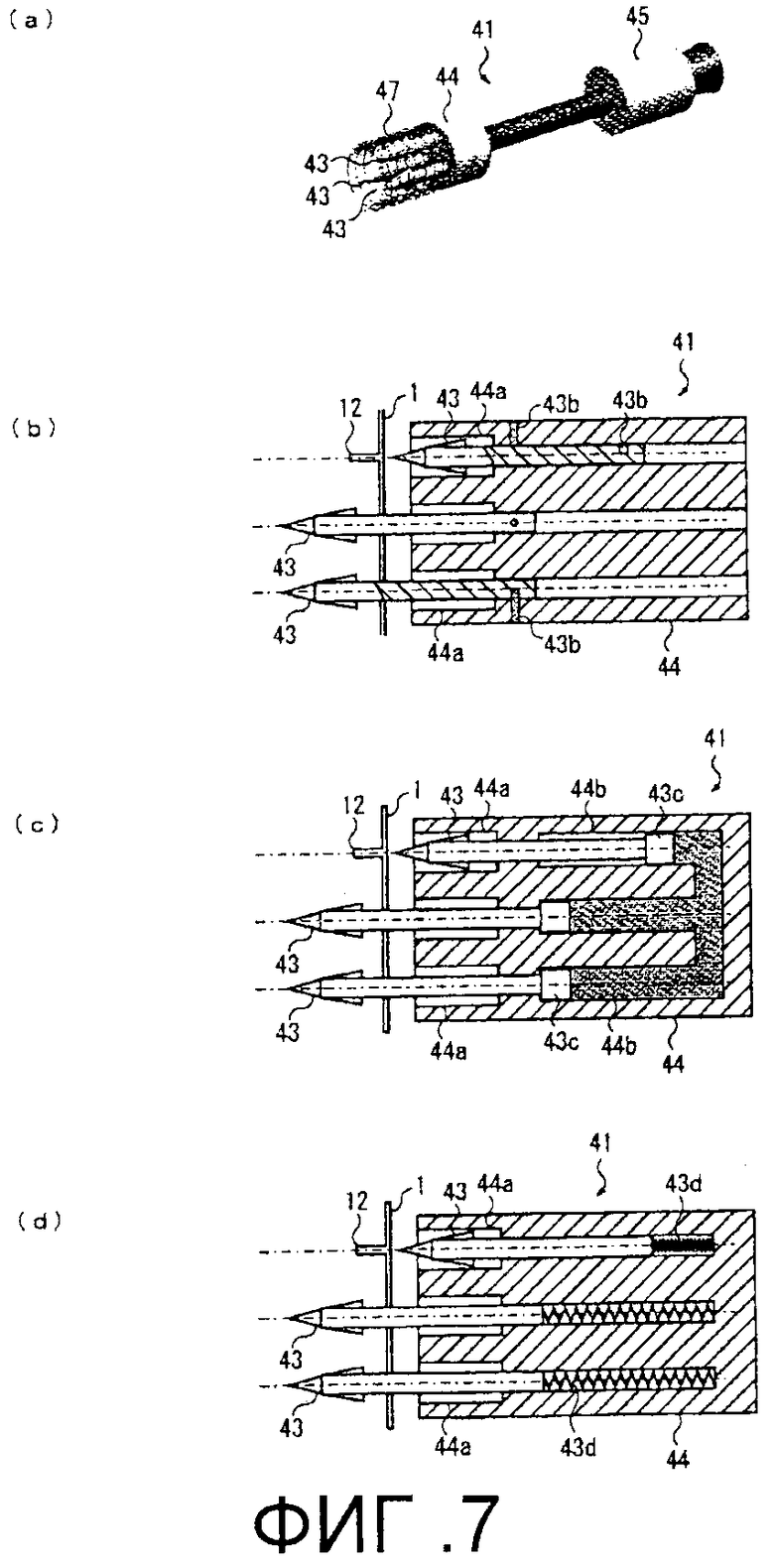
Фиг. 7 представляет собой схему, иллюстрирующую модификацию гарпуна, (а) иллюстрирующую четвертую модификацию, (b) иллюстрирующую пятую модификацию, (с) иллюстрирующую шестую модификацию и (d) иллюстрирующую седьмую модификацию.
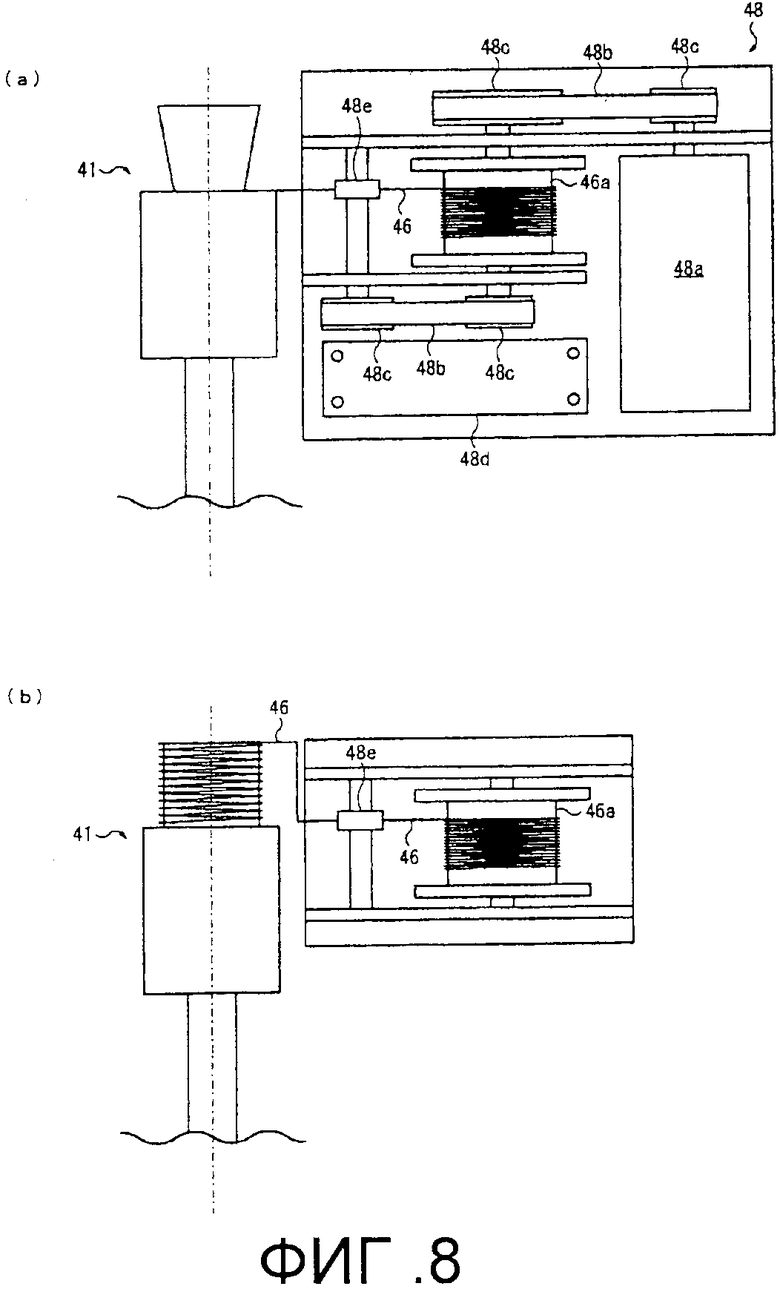
Фиг. 8 представляет собой схему, иллюстрирующую состояние хранения гарпуна, (а) иллюстрирующую схематичный чертеж, когда он включает в себя устройство намотки провода, а (b) иллюстрирующую схематичный чертеж, когда он не включает в себя устройство намотки провода.
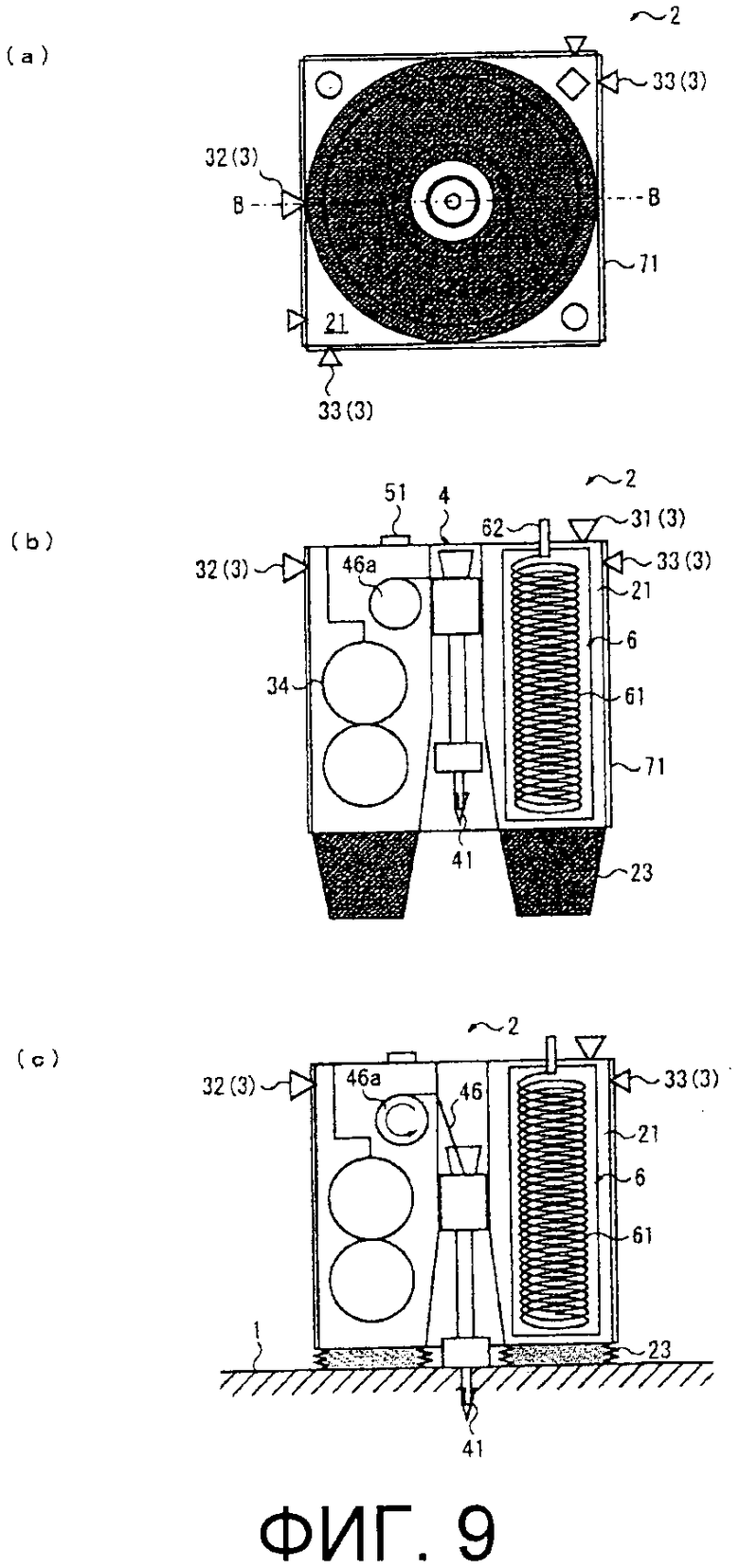
Фиг. 9 представляет собой схематичный чертеж, иллюстрирующий устройство уборки космического мусора согласно второму варианту осуществления настоящего изобретения, (а) иллюстрирует вид спереди, (b) иллюстрирует вид в поперечном разрезе В-В на фиг. 9(а) и (с) иллюстрирует схематичный чертеж, иллюстрирующий состояние использования.
Фиг. 10 представляет собой схематичный чертеж, иллюстрирующий устройство уборки космического мусора согласно третьему варианту осуществления настоящего изобретения, (а) иллюстрирует вид в поперечном разрезе, а (b) иллюстрирует вид спереди.
Фиг. 11 представляет собой схематичный вид, иллюстрирующий фиксирующие лапки, (а) иллюстрирует первый пример, (b) иллюстрирует второй пример и (с) иллюстрирует третий пример.
Фиг. 12 представляет собой блок-схему последовательности операций, иллюстрирующую часть способа уборки космического мусора согласно третьему варианту осуществления настоящего изобретения.
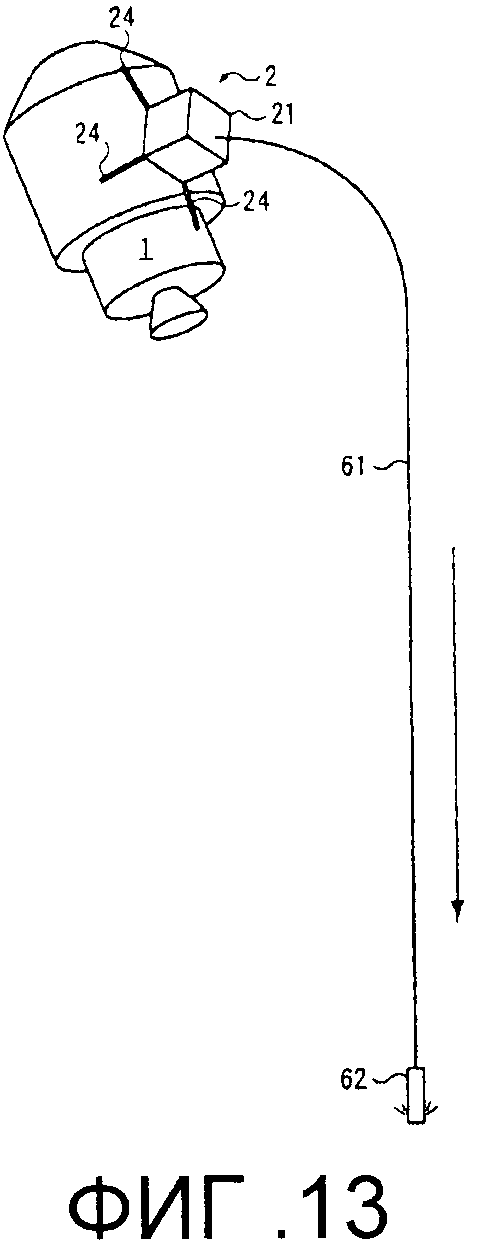
Фиг. 13 представляет собой общий схематичный чертеж, иллюстрирующий процесс торможения способа уборки космического мусора согласно третьему варианту осуществления настоящего изобретения.
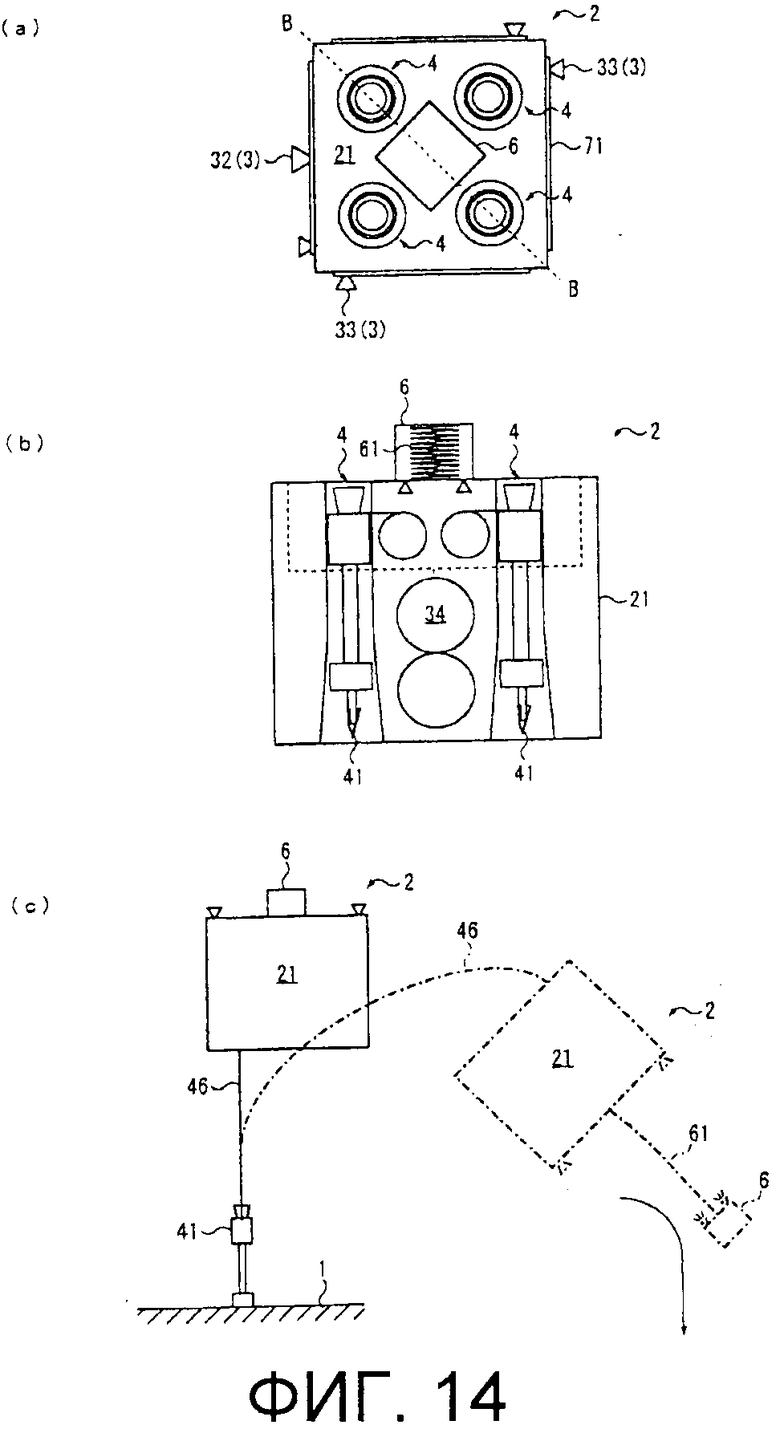
Фиг. 14 представляет собой схематичный чертеж, иллюстрирующий устройство уборки космического мусора согласно четвертому варианту осуществления настоящего изобретения, (а) иллюстрирует вид сзади, (b) иллюстрирует вид в поперечном разрезе В-В на фиг. 14(а) и (с) иллюстрирует схематичный чертеж, иллюстрирующий состояние использования.
Фиг. 15 представляет собой схематичный чертеж, иллюстрирующий устройство уборки космического мусора согласно пятому варианту осуществления настоящего изобретения, (а) иллюстрирует вид сзади, (b) иллюстрирует вид в поперечном разрезе В-В на фиг. 15(а) и (с) иллюстрирует схематичный чертеж, иллюстрирующий состояние использования.
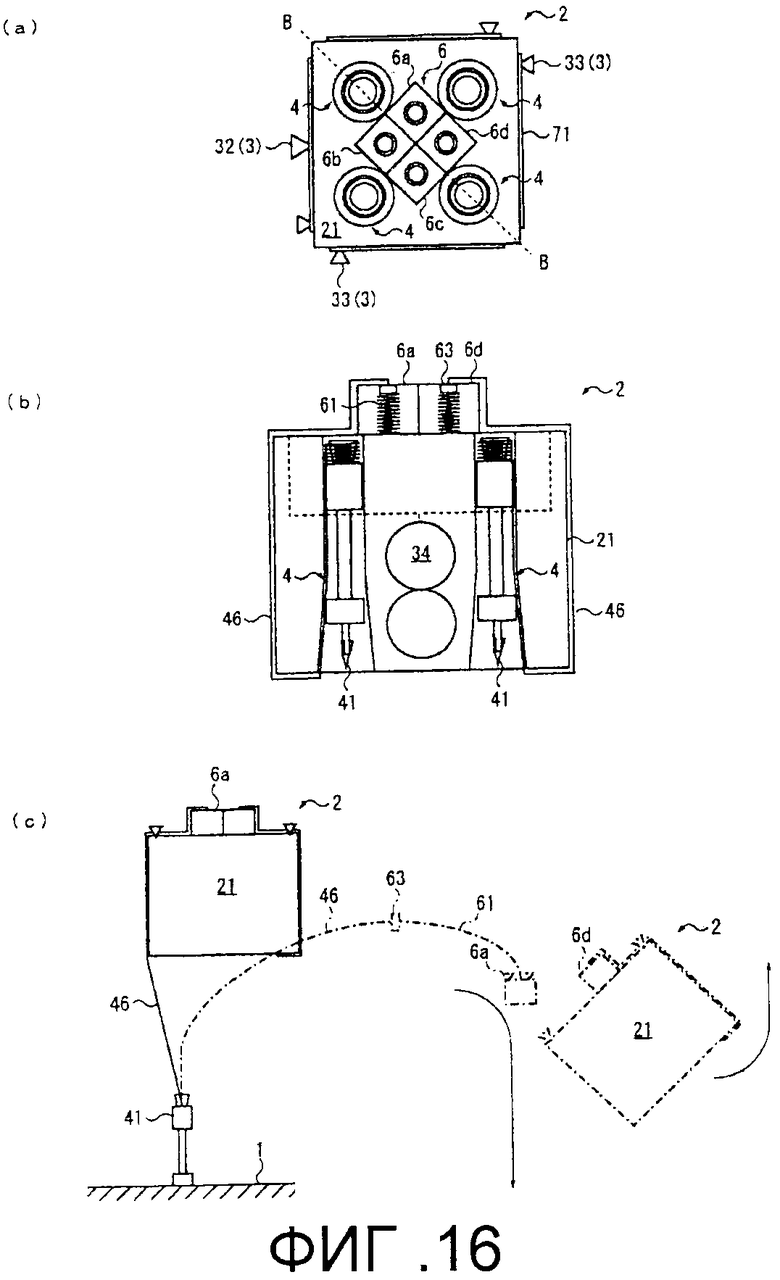
Фиг. 16 представляет собой схематичный чертеж, иллюстрирующий устройство уборки космического мусора согласно шестому варианту осуществления настоящего изобретения, (а) иллюстрирует вид сзади, (b) иллюстрирует вид в поперечном разрезе В-В на фиг. 16(а) и (с) иллюстрирует схематичный чертеж, иллюстрирующий состояние использования.
Предпочтительный вариант осуществления изобретения
[0028] Далее в данном документе с помощью фиг. 1-16 будут описаны варианты осуществления настоящего изобретения. Здесь, фиг. 1 - это общий схематичный чертеж, иллюстрирующий процессы от процесса вывода на орбиту до процесса захвата способа уборки космического мусора согласно первому варианту осуществления настоящего изобретения. Фиг. 2 - это общий схематичный чертеж, иллюстрирующий процесс торможения способа уборки космического мусора согласно первому варианту осуществления настоящего изобретения. Фиг. 3 - это блок-схема последовательности операций, иллюстрирующая способ уборки космического мусора согласно первому варианту осуществления настоящего изобретения. Фиг. 4 - это блок-схема последовательности операций, иллюстрирующая модификацию способа уборки космического мусора согласно первому варианту осуществления настоящего изобретения.
[0029] Способ уборки космического мусора согласно первому варианту осуществления настоящего изобретения предназначен для уборки космического мусора, испытывающего беспорядочное кувыркающееся движение, с орбиты посредством захвата и торможения космического мусора, как иллюстрировано на фиг. 1-3, и включает в себя: процесс вывода на орбиту (этап 1) для вывода устройства 2 уборки космического мусора на орбиту L целевого мусора 1, который является космическим убираемым мусором; процесс приближения (этапы 2, 3) для совершения приближения устройства 2 уборки космического мусора к целевому мусору 1; процесс наблюдения и перемещения (этапы 4-7) для наблюдения движения целевого мусора 1, после того как устройство 2 уборки космического мусора достигает положения Τ наблюдения, вычисления положения Ε захвата и ориентации захвата, в которой гарпун 41 может быть выпущен в целевой мусор 1, и перемещения устройства 2 уборки космического мусора в положение Ε захвата и ориентацию захвата; процесс захвата (этап 8) для выпуска гарпуна 41 в целевой мусор 1 и соединения устройства 2 уборки космического мусора и целевого мусора 1; и процесс торможения (этап 9) для торможения целевого мусора 1 посредством устройства 2 уборки космического мусора.
[0030] Целевой мусор 1, как иллюстрировано на фиг. 1, беспорядочно вращается, в то же время двигаясь по орбите L. Т.е. целевой мусор 1 движется по орбите L, в то же время испытывая беспорядочное кувыркающееся движение. Следовательно, при прикреплении тормозного устройства посредством роботизированной руки, момент приведения в действия и направление приведения в действие роботизированной руки должны управляться так, что роботизированная рука не сталкивалась с целевым мусором 1, и вычисление и управление становятся усложненными. С другой стороны, в настоящем изобретении столкновение целевого мусора 1 и устройства 2 уборки космического мусора может подавляться, поскольку целевой мусор 1 захватывается посредством выпуска гарпуна 41 из положения Ε захвата, в которой устройство 2 уборки космического мусора не сталкивается с целевым мусором 1.
[0031] Процесс вывода на орбиту (этап 1) - это процесс размещения запущенного устройства 2 уборки космического мусора примерно на орбите L целевого мусора 1. В частности, устройство 2 уборки космического мусора вводится в диапазон, из которого устройство 2 уборки космического мусора может само достигать орбиты L. Например, устройство 2 уборки космического мусора выводится в положение ниже орбиты L и постепенно достигает орбиты L за счет центробежной силы, в то же время приближаясь к целевому мусору 1, используя двигательную установку.
[0032] Устройство 2 уборки космического мусора реализовано в форме небольшого по размеру спутника, имеющего размер около нескольких десятков сантиметров до нескольких метров, например, и может быть запущено в одиночку с Земли или может быть запущено по программе участия в полете вместе с основным спутником в качестве спутника, закрепленного на корпусе основного спутника. Целевой убираемый мусор 1, в основном, задается заранее, орбита L измеряется от Земли, и устройство 2 уборки космического мусора запускается с тем, чтобы выводиться на орбиту L. Корректировка при выводе на орбиту выполняется посредством двигательной установки, установленной в устройстве 2 уборки космического мусора, на основе информации GPS (системы глобального позиционирования).
[0033] Процесс приближения (этапы 2, 3) - это процесс совершения приближения устройства 2 уборки космического мусора в положение Τ наблюдения целевого мусора 1. Положение Τ наблюдения задается, например, в положении около 30-500 м от целевого мусора 1 на орбите L. Устройство 2 уборки мусора перемещается из положения S вывода на орбиту в положение Τ наблюдения, в то же время распознавая положение самого устройства и положение целевого мусора 1 с помощью GPS или т.п. В это время устройство 2 уборки космического мусора проверяет, достигнуто или нет положение Τ наблюдения (этап 2), приближается к целевому мусору 1 (этап 3), когда положение Τ наблюдения не достигнуто (Ν), и переходит к следующему процессу, когда положение Τ наблюдения достигнуто (Υ).
[0034] Процесс наблюдения и перемещения (этапы 4-7) - это процесс совершения приближения устройства 2 уборки космического мусора к положению Ε захвата целевого мусора 1. Устройство 2 уборки космического мусора, которое достигает положения Τ наблюдения, наблюдает за целевым мусором 1 посредством блока наблюдения, такого как CCD-камера или лазерный радар (этап 4), и оценивает модель движения целевого мусора 1. По оцененному результату вычисляются позиция Ε захвата и ориентация захвата для выпуска гарпуна 41 в целевой мусор 1 (этап 5). Позиция Ε захвата - это позиция, в которой целевой мусор 1, испытывающий кувыркающееся движение, и устройство 2 уборки космического мусора не сталкиваются, например, и устанавливается в положение примерно от нескольких метров до нескольких десятков метров от целевого мусора 1. Положение Ε захвата может быть положением вне орбиты L целевого мусора 1. Ориентация захвата означает состояние установки в направлении, из которого гарпун 41 может быть выпущен в часть, где гарпун 41 желательно должен быть выпущен в целевой мусор 1.
[0035] Также, устройство 2 уборки космического мусора может вычислять положение Ε захвата и ориентацию захвата так, чтобы выпустить гарпун 41 в полый фрагмент, такой как резервуар 11 целевого мусора 1. Выпуская гарпун 41 в полый фрагмент, такой как резервуар 11, гарпун 41 может быть легко зацеплен с целевым мусором 1. Также, положение Ε захвата и ориентация захвата могут быть таким положением и ориентацией, что гарпун 41 может быть, по существу, вертикально выпущен в поверхность целевого мусора 1, или может быть таким положением и ориентацией, что гарпун 41 может быть выпущен в положения с небольшим отклонением, такой как фиксированная точка в расчетной модели движения целевого мусора 1.
[0036] После того как положение Ε захвата и ориентация захвата вычислены, устройство 2 уборки космического мусора автономно перемещается в положение Ε захвата и ориентацию захвата с помощью двигательной установки. В это время, устройство 2 уборки космического мусора проверяет, достигнуты или нет положение/ориентация захвата (этап 6), перемещается к положению Ε захвата и ориентации захвата (этап 7), когда положение Ε захвата и ориентация захвата не достигнуты (Ν), и переходит к следующему процессу, когда положение Ε захвата и ориентация захвата достигнуты (Υ).
[0037] Процесс захвата (этап 8) - это процесс выпускания гарпуна 41 в целевой мусор 1 и захвата целевого мусора 1. Гарпун 41 соединяется с устройством 2 уборки космического мусора проводом 4 6, и когда гарпун 41 зацепляется с целевым мусором 1, достигается состояние того, что целевой мусор 1 и устройство 2 уборки космического мусора соединяются проводом 46. Адаптируя систему захвата целевого мусора 1 посредством выпуска гарпуна 41 таким образом, в состоянии размещения устройства 2 уборки космического мусора в положения и ориентации (положения Ε захвата и ориентации захвата), чтобы не сталкиваться с целевым мусором 1, испытывающим кувыркающееся движение, гарпун 41 может управляться так, чтобы не сталкиваться с целевым мусором 1. Таким образом, по сравнению с другими системами (например, системой для выполнения удерживания роботизированной рукой) механизм и вычисление для определения положения Ε захвата и ориентации захвата могут быть упрощены или сделаны более оптимальными с точки зрения работы, производительность, требуемая для механизма наблюдения/захвата устройства 2 уборки космического мусора, может быть снижена, нагрузки по обработке в контроллере могут быть уменьшены, и целевой мусор 1 и устройство 2 для устранения космического мусора могут быть легко соединены.
[0038] Процесс торможения (этап 9) - это процесс торможения целевого мусора 1 устройством 2 уборки космического мусора и ускорения или управления падением на Землю. Процесс торможения - это, например, процесс торможения целевого мусора 1 посредством сброса проводящего фала 61 из устройства 2 уборки космического мусора в космос. Средство для торможения целевого мусора 1 может быть средством получения давления, которое получает давление радиации солнечного ветра или солнечного света или т.п.
[0039] Как иллюстрировано на фиг. 2, проводящий фал 61 может включать в себя дальнюю концевую часть 62, расположенную на дальнем конце и снабженную средством формирования реактивной движущей силы для формирования реактивной движущей силы. Поскольку дальняя концевая часть 62 включает в себя средство формирования реактивной движущей силы, проводящий фал 61 может направляться в направлении, в котором желательно развертывание, и развертывание проводящего фала 61 может быть стабилизировано. Для средства формирования реактивной движущей силы может использоваться небольшой по размеру ракетный двигатель, струя сжатого газа с использованием азота или сжиженного варианта фтороуглерода или т.п., однокомпонентное топливо, электрическая движущая сила импульсного плазменного ракетного двигателя малой тяги, и двигательная установка, использующая сублимат, такой как камфора или т.п.
[0040] Сбрасывая проводящий фал 61 из устройства 2 уборки космического мусора, сила Лоренца действует на проводящий фал 61 из соотношения между током, протекающим к проводящему фалу 61, и магнитным полем, где проводящий фал 61 развертывается, и проводящий фал 61 втягивается в направлении, противоположном направлению продвижения целевого мусора 1, таким образом, затормаживая целевой мусор 1. Следовательно, управляя длиной проводящего фала 61 и величиной тока, падение целевого мусора 1 может ускоряться или управляться.
[0041] В блок-схеме последовательности операций, иллюстрированной на фиг. 4, последовательность от вывода на орбиту (этап 1) до достижения положения Τ наблюдения (этап 2) выполняется пошагово. Для того чтобы наблюдать за движением целевого мусора 1 и оценивать модель движения, требуется блок наблюдения (например, CCD-камера или лазерный радар или т.п.), который может точно распознавать движение целевого мусора 1. Для того чтобы наблюдать за целевым мусором 1 посредством блока наблюдения, предпочтительно приближаться в положение примерно в несколько десятков метров, например. Также, положение S вывода на орбиту, в которой устройство 2 уборки космического мусора выводится на орбиту, часто является положением, находящимся, по меньшей мере, на расстоянии от нескольких сотен метров до нескольких тысяч метров от целевого мусора 1, и расстояние перемещения в положение Τ наблюдения является длинным. В начале, после того как устройство 2 уборки космического мусора выводится на орбиту, предпочтительно использовать GPS для того, чтобы распознавать свою собственную положение. Однако трудно точно прогнозировать положение целевого мусора 1 на основе обычных данных наблюдения с земли, и иногда трудно точно направлять устройство 2 уборки космического мусора в положение Τ наблюдения. Затем, когда устройство 2 уборки космического мусора приближается к целевому мусору 1, положение Τ наблюдения может быть достигнуто, при одновременном отслеживании положения целевого мусора 1.
[0042] В частности, устройство 2 уборки космического мусора имеет отслеживающее устройство, такое как лазерный радар, установленное на нем, и устройство 2 уборки космического мусора проверяет, достигнуто или нет положение наблюдения, в котором GPS должна быть переключена на устройство наблюдения (этап 21), приближается к целевому мусору 1 с помощью GPS (этап 22), когда положение наблюдения не достигнуто (Ν), и переключается с GPS на наблюдение целевого мусора 1 посредством устройства наблюдения (этап 23), когда положение наблюдения достигнуто (Υ). После этого устройство 2 уборки космического мусора приближается, в то же время измеряя направление и расстояние до целевого мусора 1 посредством отслеживающего устройства, и переходит к следующему процессу (этап 2). Также, процессы после этапа 2 являются такими же, что и в блок-схеме последовательности операций, иллюстрированной на фиг. 3.
[0043] Далее будет описано устройство уборки космического мусора согласно первому варианту осуществления настоящего изобретения. Здесь, фиг. 5 - это схематичный чертеж, иллюстрирующий устройство уборки космического мусора согласно первому варианту осуществления настоящего изобретения, (а) иллюстрирует вид спереди, а (b) иллюстрирует вид в поперечном разрезе В-В на фиг. 5(а). Фиг. 6 - это схема, иллюстрирующая устройство захвата, (а) иллюстрирует общую схему, (b) иллюстрирует перспективный вид гарпуна, (с) иллюстрирует первую модификацию гарпуна, (d) иллюстрирует вторую модификацию гарпуна, а (е) иллюстрирует третью модификацию гарпуна. Фиг. 7 - это схема, иллюстрирующая модификации гарпуна, (а) иллюстрирует четвертую модификацию, (b) иллюстрирует пятую модификацию, (с) иллюстрирует шестую модификацию, и (d) иллюстрирует седьмую модификацию. Фиг. 8 - это схема, иллюстрирующая состояние хранения гарпуна, (а) иллюстрирует схематичный чертеж, когда он включает в себя устройство намотки провода, а (b) иллюстрирует схематичный чертеж, когда он не включает в себя устройство намотки провода.
[0044] Устройство 2 уборки космического мусора согласно первому варианту осуществления настоящего изобретения - это, как иллюстрировано на фиг. 5, устройство уборки космического мусора, которое убирает космический мусор, испытывающий беспорядочное кувыркающееся движение, с орбиты посредством захвата и торможения космического мусора и включает в себя: двигательную установку 3 для выполнения управления причаливанием и ориентацией по отношению к целевому мусору 1 (см. фиг. 1), который является космическим убираемым мусором/ устройство 4 захвата, имеющее гарпун 41, который может быть выброшен к целевому мусору 1, устройство 5 наблюдения для наблюдения за движением целевого мусора 1 и вычисления положения Ε захвата и ориентации захвата, в которых гарпун 41 может быть выпущен в полый фрагмент, такой как резервуар 11 целевого мусора 1; тормозное устройство 6, непосредственно или опосредованно соединенное с гарпуном 41, для торможения целевого мусора 1; корпусную часть 21, на которой устанавливаются двигательная установка 3, устройство 4 захвата, устройство 5 наблюдения и тормозное устройство; и устройство 7 подачи энергии, заряжаемое посредством панели 71 солнечной батареи, расположенной на внешней поверхности корпусной части 21, для подачи энергии устройствам, установленным в основной части 21.
[0045] Двигательная установка 3 - это устройство, используемое для приближения к целевому мусору 1 устройства 2 уборки космического мусора (основной части 21), перемещения в положение Ε захвата и ориентацию захвата и управления ориентацией основной части 21 и т.д. В частности, двигательная установка 3 включает в себя, например, корректирующий микродвигатель 31 главного направления, описанный на фиг. 5(b), боковой корректирующий микродвигатель 32 и корректирующий микродвигатель 33 для управления ориентацией, описанные на фиг. 5(a), и резервуар 34 для ракетного топлива для формирования газа, который должен выпускаться струей из корректирующих микродвигателей, и т.д. Конфигурация двигательной установки 3 является лишь примером и не ограничивается конфигурацией, иллюстрированной на чертеже.
[0046] Устройство 4 захвата - это устройство, которое имеет гарпун 41, который может выбрасываться из пускового механизма 42, сформированного или установленного на корпусной части 21, и соединяет целевой мусор 1 и устройство 2 уборки космического мусора (корпусную часть 21). Гарпун 41 включает в себя, как описано на фиг. 5(b) и фиг. 6(а) и (b), заостренную концевую часть 42, имеющую зубчатую часть 43а, которая может зацепляться с целевым мусором 1, стопорную часть 44, которая должна быть в контакте с поверхностью целевого мусора 1, часть 45 формирования реактивной движущей силы для выброса гарпуна 41 и провод 46 для соединения гарпуна 41 с корпусной частью 21. Также, устройство 4 захвата может включать в себя механизм корректировки направления выброса (например, шарнирный механизм) для корректировки или точной регулировки направления выброса гарпуна 41.
[0047] Заостренная концевая часть 43 состоит из металла, имеющего прочность, достаточную, чтобы проходить через поверхность целевого мусора 1, и имеет заостренный дальний конец. Зубчатая часть 43а может состоять из задней поверхности множества треугольных лезвийных элементов, сформированных на боковой поверхности заостренной концевой части 43, или может состоять из конической части нижней поверхности.
[0048] Стопорная часть 44 предназначена для регулирования гарпуна 41 с тем, чтобы не проходить насквозь целевой мусор 1. Когда гарпун 41 проходит через переднюю и заднюю сторону целевого мусора 1, существует вероятность формирования лишних сломанных частей (мусора), когда гарпун 41 вылезает наружу. Также, в случае, когда остается окисляющий агент, когда гарпун 41 достигает резервуара с окисляющим агентом внутри целевого мусора 1, существует вероятность возникновения взрыва. Тогда, для того, чтобы зацеплять гарпун 41 с поверхностью целевого мусора 1, например, гарпун 41 выпускается в резервуар 11 (полый фрагмент), такой как топливный бак или пустой резервуар для окислительного агента, и стопорная часть 44 формируется на гарпуне 41.
[0049] Часть 45 формирования реактивной движущей силы предназначена для придания толчка гарпуну 41. Часть 45 формирования реактивной движущей силы состоит из ракетного двигателя с твердым топливом или т.п., например. Также, пусковой механизм 42 имеет полость, проходящую сквозь корпусную часть 21, и конфигурируется так, что, когда часть 45 формирования реактивной движущей силы задействуется, реакция не может быть приложена к корпусной части 21 простым образом. Необязательно требуется, чтобы пусковой механизм 42 был встроен в корпусную часть 21, и он может быть сконфигурирован так, чтобы внешним образом прикрепляться к поверхности корпусной части 21.
[0050] Провод 46 является элементом для соединения гарпуна 41 и корпусной части 21 и является элементом для соединения целевого мусора 1 и корпусной части 21 (устройства 2 уборки космического мусора) посредством гарпуна 41, зацепленного с целевым мусором 1. Провод 46 имеет длину от нескольких метров до нескольких десятков метров, например, и когда гарпун 41 хранится, сворачивается в состояние намотки на барабан 46а для провода, чтобы подавлять выпадение гарпуна 41. При выбросе гарпуна 41 провод 46 подается с барабана 46а для провода, сопровождая продвижение гарпуна 41. Также, гарпун 41 может быть зацеплен с пусковым механизмом 42 посредством предохранительной чеки или втягивающегося стопора, чтобы выполнять позиционирование или подавлять выпадение.
[0051] Здесь будут описаны модификации гарпуна 41. Первая модификация гарпуна 41, иллюстрированная на фиг. 6(с), включает в себя цилиндрический корпус 47 (упругий корпус), расположенный так, чтобы охватывать внешнюю окружность заостренной концевой части 43 на передней поверхности стопорной части 44, и выполнена с возможностью формировать замкнутое пространство, сжимая цилиндрический корпус 47 между поверхностью целевого мусора 1 и стопорной частью 44, когда заостренная концевая часть 43 зацепляется с целевым мусором 1. Цилиндрический корпус 47 имеет структуру гофрированной трубки, например. Размещая цилиндрический корпус 47, рассеивание сломанных частиц, таких как теплоизолирующий материал, формируемое, когда гарпун 41 проходит навылет, может подавляться. Цилиндрический корпус 47 конфигурируется, по существу, в цилиндрической форме, например, но может быть сконфигурирован в усеченной конусообразной цилиндрической форме, в которой диаметр дальней крайней стороны увеличен.
[0052] Вторая модификация гарпуна 41, иллюстрированная на фиг. 6(d), включает в себя волокнистый корпус 47′ (упругий корпус), расположенный так, чтобы закрывать заостренную концевую часть 43 на передней поверхности стопорной части 44, и выполнена с возможностью подавлять рассеивание сломанных частиц, сформированных, когда гарпун 41 проходит навылет, сжимая волокнистый корпус 47′ (упругий корпус) между поверхностью целевого мусора 1 и стопорной частью 44, когда заостренная концевая часть 43 зацепляется с целевым мусором 1. В качестве волокнистого корпуса 47′, когда используется грубый материал, рассеиваемые сломанные частицы могут быть вплетены и пойманы волокнистым корпусом 47′, а когда используется материал с мелкими отверстиями, рассеиваемые сломанные частицы могут удерживаться между волокнистым корпусом 47′ и поверхностью целевого мусора 1. Световые и жесткие арамидные волокна или т.п. формируются в форме губки для волокнистого корпуса 47′, например, и упругий корпус может быть полимерным типа губки или металлическим, таким как стальная мочалка, вместо волокнистого корпуса 47′.
[0053] В третьей модификации гарпуна 41, иллюстрированной на фиг. 6(e), зубчатая часть 43а заостренной концевой части 43 выполняется с возможностью закрывания при прохождении через целевой мусор 1 и открывания после прохождения через целевой мусор 1. В третьей модификации зубчатая часть 43а состоит из элемента пластинчатой пружины, например, и выполнена с возможностью растягиваться и сжиматься в радиальном направлении гарпуна 41. Для того чтобы усиливать силу восстановления зубчатой части 43а, может быть размещен упругий корпус из резины или винтовая пружина. Также, механизм открытия/закрытия зубчатой части 43а является лишь примером и не ограничивается конфигурацией, иллюстрированной на чертеже.
[0054] В четвертой модификации гарпуна 41, иллюстрированной на фиг. 7(a), множество заостренных концевых частей 43 размещаются на поверхности стопорной части 44. В то время как одна заостренная концевая часть 43 располагается в гарпуне 41, иллюстрированном на фиг. 6(b), три заостренных концевых части 43 располагаются в гарпуне 41, иллюстрированном на фиг. 7(а). Также, по внешней окружности заостренных концевых частей 43 может быть расположен цилиндрический корпус 47, как иллюстрировано на чертеже.
[0055] Пятая-седьмая модификации гарпуна 41, иллюстрированные на фиг. 7(b)-(d), предполагают случай, что в гарпуне 41, включающем в себя множество заостренных концевых частей 43, часть гарпуна 41 выпускается в твердую часть (например, часть, где формируется ребро 12, конфигурирующее усиливающую часть целевого мусора 1) целевого мусора 1. В частности, соответствующие заостренные концевые части 43 в пятой-седьмой модификациях выполняются с возможностью втягивания, когда поверхность целевого мусора 1 не может быть пройдена насквозь. Приспосабливая такую систему, поскольку устраняется необходимость нацеливания в положение выпуска гарпуна целевого мусора 1, испытывающего кувыркающееся движение, избегая твердой части, такой как балка ферменной конструкции, механизм и вычисление для определения положения Ε захвата и ориентации захвата могут быть упрощены или сделаны более экономичными с точки зрения работы, производительность, требуемая для механизма наблюдения/захвата устройства 2 уборки космического мусора, может быть снижена, нагрузки по обработке на контроллер могут быть уменьшены, и целевой мусор 1 и устройство 2 уборки космического мусора могут быть легко соединены.
[0056] В пятой модификации гарпуна 41, иллюстрированной на фиг. 7(b), заостренная концевая часть 43 прикрепляется к стопорной части 44 посредством срезной чеки 43b, которая должна быть сломана, когда подвергается фиксированному давлению. В стопорной части 44 формируется пространство (часть 44а хранилища), имеющее возможность хранить заостренную концевую часть 43, включающую в себя зубчатую часть 43а. Срезающее усилие срезной чеки 43b регулируется так, чтобы она не ломалась, когда заостренная концевая часть 43 сталкивается с пластинчатой частью целевого мусора 1, и так, чтобы ломаться, когда заостренная концевая часть 43 сталкивается с твердой частью целевого мусора 1.
[0057] В шестой модификации гарпуна 41, иллюстрированной на фиг. 7(с), соответствующие заостренные концевые части 43 выполнены с возможностью втягивания посредством газового цилиндра 44b. Соответствующие заостренные концевые части 43 поддерживаются через поршень 43с, вставленный в газовый цилиндр 44b. За счет такой конфигурации заостренные концевые части 43 могут втягиваться, используя сжимаемость газа. Как иллюстрировано на чертеже, конфигурируя газовый цилиндр 44b так, чтобы связывать части цилиндра, соответствующие соответствующим заостренным концевым частям 43, посредством газа, сжатого некоторой заостренной концевой частью 43, другая заостренная концевая часть 43 может ускоряться вперед. Также, газовый цилиндр 4 4b может быть расположен отдельно для соответствующих заостренных концевых частей 43.
[0058] В седьмой модификации гарпуна 41, иллюстрированной на фиг. 7(d), соответствующие заостренные концевые части 43 выполнены с возможностью втягивания посредством винтовой пружины 43d. Сила упругости винтовой пружины 43d регулируется так, чтобы не сжиматься, когда заостренная концевая часть 43 сталкивается с пластинчатой частью целевого мусора 1, и так, чтобы сжиматься, когда заостренная концевая часть 43 сталкивается с твердой частью целевого мусора 1. Вместо винтовой пружины 43d может быть использовано упругое тело из резины или т.п.
[0059] Устройство 5 наблюдения включает в себя, например, блок 51 наблюдения, расположенный в передней части корпусной части 21, и операционную часть 52 для обнаружения относительной положения и ориентации целевого мусора 1 и корпусной части 21 из видеоизображений или изображений или т.п., полученных блоком 51 наблюдения, оценки модели движения целевого мусора 1 из временной последовательности информации о положения и ориентации и вычисления положения Ε захвата и ориентации захвата. Блок 51 наблюдения состоит из CCD-камеры или лазерного радара или т.п., который может захватывать кувыркающееся движение целевого мусора 1 как видеоизображение или изображение или т.п. Операционная часть 52 состоит из блока арифметической обработки, такого как CPU, и может включать в себя запоминающее устройство для записи видеоизображений или изображений или т.п. блока 51 наблюдения. Операционная часть 52 может состоять из части контроллера (не показан на чертеже) устройства 2 уборки космического мусора. Контроллер управляет двигательной установкой 3 на основе результата работы устройства 5 наблюдения, заставляет корпусную часть 21 перемещаться в положение Ε захвата и корректирует направление выброса (ориентацию захвата) гарпуна 41. Также, когда устройство 4 захвата включает в себя механизм корректировки направления выброса, грубое позиционирование и определение ориентации могут выполняться в двигательной установке 3, и направление выброса гарпуна 41 может точно регулироваться в механизме корректировки направления выброса.
[0060] Тормозное устройство 6 включает в себя, например, проводящий фал 61, который должен сбрасываться в космос, и дальнюю концевую часть 62, расположенную на дальнем конце проводящего фала 61 и снабженную средством формирования реактивной движущей силы. Как описано выше, для средства формирования реактивной движущей силы может использоваться небольшой по размеру ракетный двигатель, струя сжатого газа, однокомпонентный корректирующий микродвигатель, электроракетный двигатель и сублимат или т.п. Проводящий фал 61, как иллюстрировано на чертеже, хранится внутри корпуса в форме катушки и выполнен с возможностью распускаться в прямую форму, сбрасывая дальнюю концевую часть 62. Тормозное устройство 6 может храниться внутри корпусной части 21 или может быть прикреплено внешним образом к поверхности корпусной части 21.
[0061] Устройство 7 подачи энергии включает в себя, например, панель 71 солнечной батареи, расположенную на внешней поверхности корпусной части 21, и аккумулятор 72 для хранения электричества, сгенерированного панелью 71 солнечной батареи. Электричество, заряженное в аккумуляторе 72, подает энергию устройствам, требующим энергии, таким как двигательная установка 3, устройство.4 захвата, устройство 5 наблюдения и устройство 6 торможения, когда необходимо, посредством контроллера.
[0062] Корпусная часть 21 состоит из корпуса, аналогичного так называемому спутнику небольшого размера. В отличие от двигательной установки 3, устройства 4 захвата, устройства 5 наблюдения, тормозного устройства 6 и устройства 7 подачи энергии, корпусная часть 21 может иметь отслеживающее устройство 22, такое как лазерный радар, GPS-датчик, гироскоп и датчик ускорения или т.п., установленное на ней. Также, хотя не показано на чертеже, внешняя периферия корпусной части 21 покрыта теплоизолирующим материалом.
[0063] Впрочем, устройство 4 захвата может включать в себя устройство 48 намотки провода, которое может наматывать провод 46, как иллюстрировано на фиг. 8(а). Устройство 48 намотки провода включает в себя, например, электромотор 48а для формирования движущей энергии, механизм ременной передачи (зубчатый ремень 48b привода и шкив 48с) для передачи движущей энергии электромотора 48а барабану 46а для провода, часть 48d управления для управления движущей энергией электромотора 48а и механизм 48е уровня намотки для равномерной намотки провода 46. При выбросе гарпуна 41 предпочтительно прерывать подачу энергии электромотору 48а, и приводной вал возвращается в свободно вращающееся состояние. Также, механизм передачи энергии не ограничивается механизмом ременной передачи и может состоять из зубчатой передачи.
[0064] Размещая устройство 48 намотки провода, корпусная часть 21 может быть близко подведена к целевому мусору 1 посредством намотки провода 46 после зацепления заостренной концевой части 43 с целевым мусором 1. Также, поскольку существует вероятность того, что провод 46 запутается с целевым мусором 1, если провод 46 ослаблен между целевым мусором 1 и устройством 2 уборки космического мусора, устройство 48 намотки провода может быть задействовано так, чтобы нагружать провод 46 с фиксированным натяжением и поддерживать прямое натянутое состояние.
[0065] Когда намотка провода 46 не требуется, как иллюстрировано на фиг. 8(b), устройство 48 намотки провода может быть исключено. Для того чтобы стабилизировать повторную намотку провода 46 с барабана 46а для провода, может быть размещен механизм 48е уровня намотки. Также провод 46 может не только наматываться вокруг барабана 46а для провода, но также наматываться вокруг задней концевой части гарпуна 41. Дополнительно, когда длина провода 46 короткая, барабан 46а для провода может быть исключен. При намотке провода 46 вокруг задней концевой части гарпуна 41 предпочтительно наматывать провод 46 от передней к задней части, например, так, что провод 46 плавно распускается при выбросе гарпуна 41.
[0066] Далее, устройство 2 уборки космического мусора согласно другим вариантам настоящего изобретения будет описано со ссылкой на фиг.9-11. Здесь, фиг. 9 - это схематичный чертеж, иллюстрирующий устройство уборки космического мусора согласно второму варианту осуществления настоящего изобретения, (а) иллюстрирует вид спереди, (b) иллюстрирует вид в поперечном разрезе В-В на фиг.9(а) и (с) иллюстрирует схематичный чертеж, иллюстрирующий состояние использования. Фиг.10 - это схематичный чертеж, иллюстрирующий устройство уборки космического мусора согласно третьему варианту осуществления настоящего изобретения, (a) иллюстрирует вид в поперечном разрезе, а (b) иллюстрирует вид спереди. Фиг.11 - это схематичный вид, иллюстрирующий фиксирующие лапки, (а) иллюстрирует первый пример, (b) иллюстрирует второй пример и (с) иллюстрирует третий пример. Те же знаки привязываются к тем же компонентам, что и в устройстве 2 уборки космического мусора согласно первому варианту осуществления, и излишние описания будут исключены.
[0067] В устройстве 2 уборки космического мусора согласно второму варианту осуществления, иллюстрированному на фиг.9(а) и (b), кольцеобразный буферный материал 23 размещается в передней части корпусной части 21. Буферный материал 23 формируется из металла, такого как сотовый алюминий, или полимера, такого как уретановый каучук. За счет такой конфигурации, которая иллюстрирована на фиг.9(с), при близком подведении корпусной части 21 к целевому мусору 1 посредством намотки провода 46 после зацепления гарпуна 41 с целевым мусором 1, удар, когда корпусная часть 21 сталкивается с целевым мусором 1, может быть смягчен, и дробление целевого мусора 1, и повреждение устройства 2 уборки космического мусора могут подавляться.
[0068] Также, за счет такой конфигурации, устройство 2 уборки космического мусора может быть близко подведено к целевому мусору 1, даже когда форма поверхности целевого мусора 1 является сложной формой, не требуется точное управление положением/скоростью при близком подведении устройства 2 уборки космического мусора к целевому мусору 1, испытывающему кувыркающееся движение, нагрузки по управлению положением/скоростью при выполнении близкого подведения могут быть смягчены, механизм и вычисление для определения положения/ориентации/скорости для выполнения близкого подведения могут быть упрощены или сделаны более экономными с точки зрения работы, производительность, требуемая для механизма наблюдения/захвата устройства 2 уборки космического мусора, может быть снижена, нагрузки по обработке на контроллер могут быть уменьшены, и целевой мусор 1, и устройство 2 уборки космического мусора могут быть легко соединены. Конфигурация буферного материала 23 не ограничивается иллюстрированной на чертеже и может быть формой прямоугольного кольца или конфигурацией, распределенной и размещенной в передней части корпусной части 21.
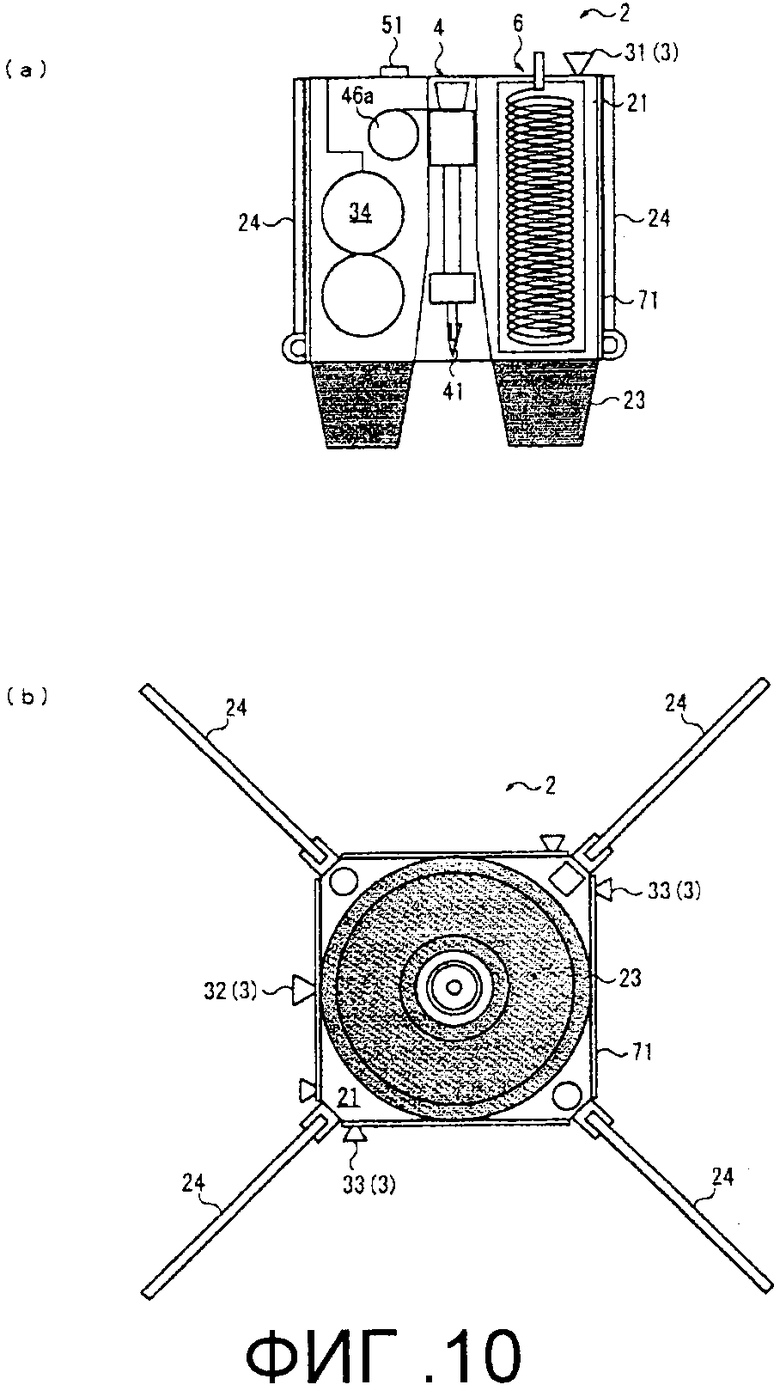
[0069] Устройство 2 уборки космического мусора согласно третьему варианту осуществления, иллюстрированному на фиг.10(а) и (b), включает в себя множество фиксирующих лапок 24, размещенных с возможностью вращения на корпусной части 21, и после того как корпусная часть 21 близко подведена к целевому мусору 1, фиксирующие лапки 24 разворачиваются, чтобы прикреплять корпусную часть 21 к целевому мусору 1, и движение целевого мусора 1 подавляется с помощью двигательной установки 3. Состояние закрытия фиксирующих лапок 24 иллюстрируется на фиг.10(a), а состояние открытия фиксирующих лапок 24 иллюстрируется на фиг.10(b). За счет такой конфигурации беспорядочное кувыркающееся движение целевого мусора 1 может быть подавлено фиксирующими лапками 24 и двигательной установкой 3, и тормозное устройство может быть использовано в устойчивом состоянии. Особенно, когда проводящий фал 61 используется в качестве тормозного устройства 6, может не допускаться бесконтрольное перемещение или запутывание проводящего фала.
[0070] Также, за счет такой конфигурации, устройство 2 уборки космического мусора может быть привязано к целевому мусору 1, даже когда форма поверхности целевого мусора 1 является сложной формой, и поскольку степень свободы положения, которая должна быть соединена с целевым мусором 1, испытывающим кувыркающееся движение (т.е. положения выпуска гарпуна), увеличивается, механизм и вычисление для определения положения Ε захвата и ориентации захвата могут быть упрощены или сделаны более экономными с точки зрения работы, производительность, требуемая для механизма наблюдения/захвата устройства 2 уборки космического мусора, может быть смягчена, нагрузки по обработке на контроллер могут быть уменьшены, и целевой мусор 1, и устройство 2 уборки космического мусора могут быть легко соединены. На фиг. 10(b) изображения бокового корректирующего микродвигателя 32 и корректирующего микродвигателя 33 для управления ориентацией исключены для удобства описаний.
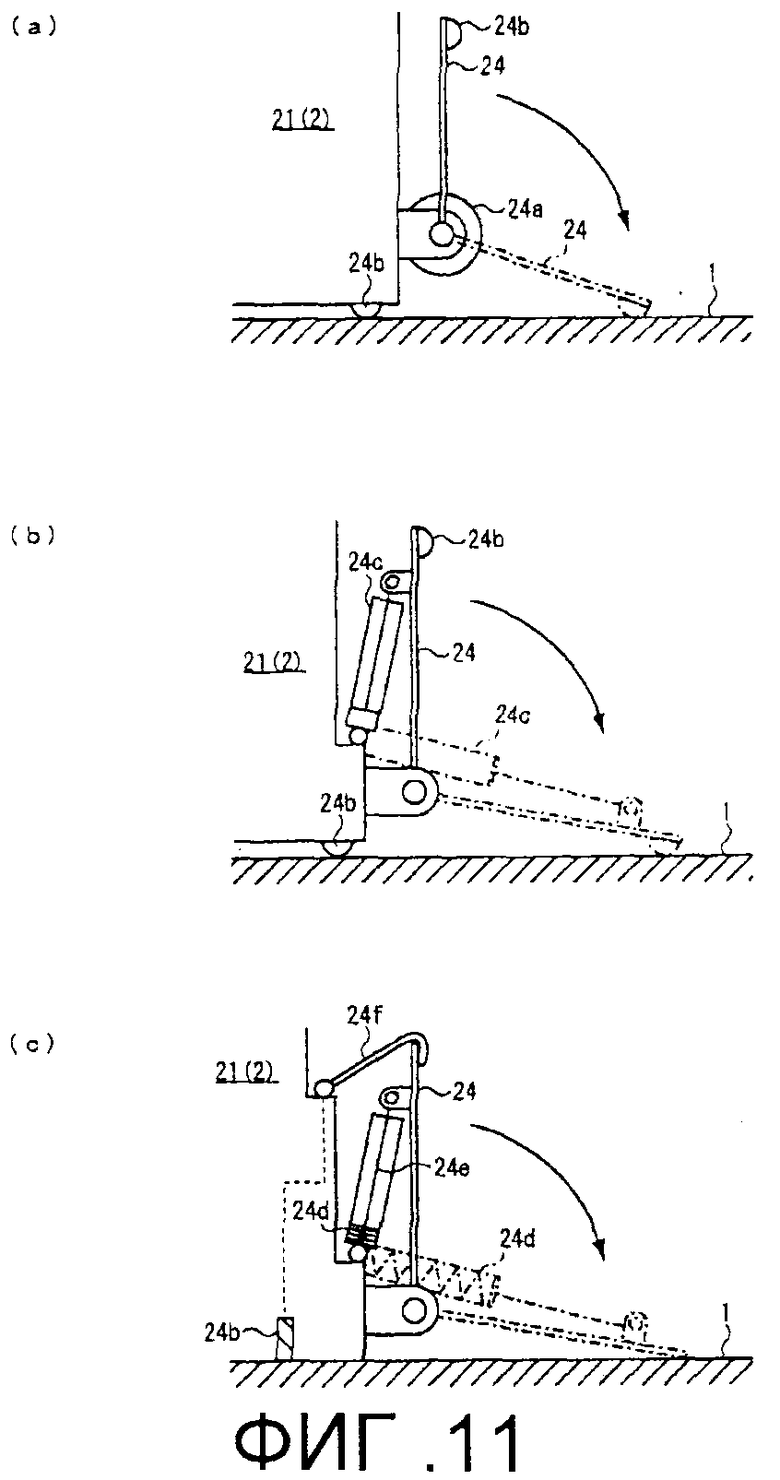
[0071] Фиксирующие лапки 24 имеют конфигурацию, иллюстрированную на фиг. 11(а)-(с), например. На соответствующих чертежах изображение буферного материала 23 исключено. Также, конфигурации с первого примера по третий пример фиксирующих лапок 24 являются только примерами и не ограничиваются конфигурациями.
[0072] В первом примере, иллюстрированном на фиг.11(a), фиксирующие лапки 24 поворачиваются посредством электромотора 24а. Электромотор 24а имеет функцию тормоза и выполнен с возможностью удерживать фиксирующую лапку 24 в состоянии хранения и развернутом состоянии. Также, может быть размещен датчик 24b в корпусной части 21 и на дальнем конце фиксирующей лапки 24, чтобы определять контакт корпусной части 21 и целевого мусора 1, таким образом, задействуя электромотор 24а и разворачивая фиксирующую лапку 24, и обнаруживать контакт фиксирующей лапки 24 и целевого мусора 1, таким образом, останавливая электромотор 24а и блокируя фиксирующую лапку 24. Также, усилие может постоянно прикладываться к фиксирующей лапке 24 посредством электромотора 24а, чтобы фиксировать корпусную часть 21 на целевом мусоре 1.
[0073] Во втором примере, иллюстрированном на фиг. 11(b), фиксирующая лапка 24 поворачивается посредством цилиндра 24с. Цилиндр 24с шарнирно соединяется с фиксирующей лапкой 24 на дальнем конце и шарнирно соединяется с корпусной частью 21 на заднем конце. Цилиндр 24с является гидравлическим цилиндром, воздушным цилиндром или электрическим цилиндром или т.п., например, и выполнен с возможностью растягиваться и сжиматься. Также, может быть размещен датчик 24b в корпусной части 21 и на дальнем конце фиксирующей лапки 24, чтобы определять контакт корпусной части 21 и целевого мусора 1, таким образом, растягивая цилиндр 24с и разворачивая фиксирующую лапку 24, и обнаруживать контакт фиксирующей лапки 24 и целевого мусора 1, таким образом, останавливая расширение цилиндра 24с и блокируя фиксирующую лапку 24. Также, усилие может постоянно прикладываться к фиксирующей лапке 24 посредством цилиндра 24с, чтобы фиксировать корпусную часть 21 на целевом мусоре 1.
[0074] В третьем примере, иллюстрированном на фиг.11(с), фиксирующая лапка 24 поворачивается посредством винтовой пружины 24d. Винтовая пружина 24d хранится внутри контейнера в состоянии сжатия, чтобы активизировать приводной вал 24е, шарнирно соединенный с фиксирующей лапкой 24 на дальнем конце, и закрытое состояние поддерживается посредством стопора 24f, соединенного с корпусной частью 21 через механизм блокировки. Когда датчик 24b обнаруживает контакт корпусной части 21 и целевого мусора 1, стопор 24f поворачивается вверх, и фиксирующая лапка 24 разворачивается. В третьем примере, даже когда фиксирующая лапка 24 приводится в соприкосновение с целевым мусором 1, усилие постоянно прикладывается к фиксирующей лапке 24 посредством винтовой пружины 24d.
[0075] В первом-третьем примерах, в то время как корпусная часть 21 прикрепляется к целевому мусору 1 посредством постоянного приложения усилия к фиксирующей лапке 24, зацепляющая часть (например, в форме гарпуна), которая должна быть воткнута и зацеплена с поверхностью корпусной части 21, может быть сформирована на дальнем конце фиксирующей лапки 24, или часть прилипания, которая должна быть приклеена или прикреплена к поверхности корпусной части 21 посредством нанесения или выпуска клейкого вещества, может быть сформирована на дальнем конце фиксирующей лапки 24. Также, фиксирующая лапка 24 не ограничивается конфигурацией поворотного типа и может быть конфигурацией фиксирующего типа, сформированной так, чтобы приводиться в соприкосновение от корпусной части 21 к целевому мусору 1 или может иметь зацепляющую часть или клейкую часть, сформированную на дальнем своем конце, или поворотный тип и фиксирующий тип могут быть использованы вместе.
[0076] Будет описан способ уборки космического мусора с помощью устройства 2 уборки космического мусора согласно третьему варианту осуществления. Здесь, фиг. 12 - это блок-схема последовательности операций, иллюстрирующая часть способа уборки космического мусора согласно третьему варианту осуществления настоящего изобретения. Фиг. 13 - это общий схематичный чертеж, иллюстрирующий процесс торможения способа уборки космического мусора согласно третьему варианту осуществления настоящего изобретения.
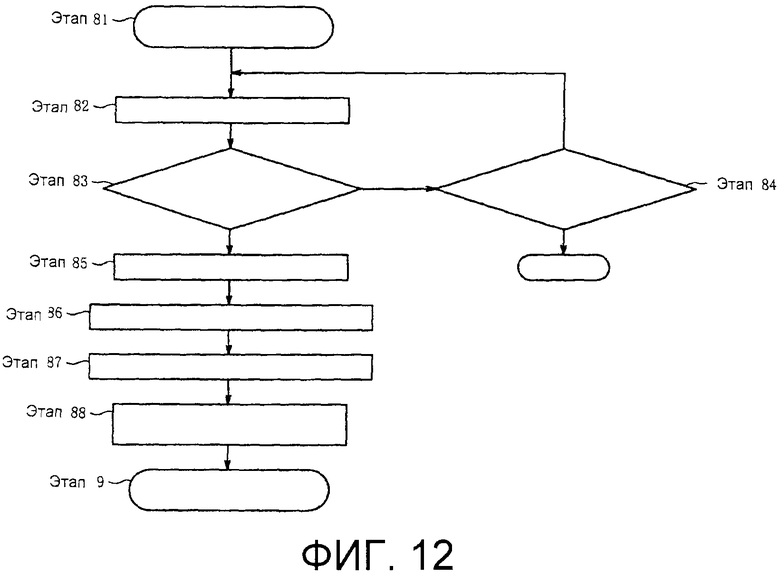
[0077] Блок-схема последовательности операций, иллюстрированная на фиг. 12, иллюстрирует процесс захвата (этап 8) более подробно. После того как устройство 2 уборки космического мусора достигает положения Ε захвата и ориентации захвата (этап 81), устройство 2 уборки космического мусора запускает гарпун 41 в направлении целевого мусора 1 (этап 82). Устройство 2 уборки космического мусора проверяет, пробил или нет гарпун 41 целевой мусор 1 (этап 83). Пробил или нет гарпун 41, может быть визуально проверено посредством блока 51 наблюдения устройства 5 наблюдения или может быть проверено посредством натяжения провода 46.
[0078] Когда гарпун 41 не пробил (N) мусор, проверяется, присутствует или нет запасной гарпун 41 (этап 84). Когда запасного гарпуна 41 нет (Ν), процесс заканчивается вследствие неудачи захвата. Когда есть запасной гарпун 41 (Y), гарпун 41 запускается снова (этап 82).
[0079] Когда гарпун 41 пробил (Y) мусор, провод 46 наматывается посредством устройства 48 намотки провода (этап 85), и устройство 2 уборки космического мусора (корпусная часть 21) подводится близко к целевому мусору 1 (этап 86). После этого, устройство 2 уборки космического мусора разворачивает фиксирующие лапки 24 (этап 87) и закрепляется на целевом мусоре 1. Затем, соответствующим образом выпуская струю корректирующего микродвигателя 31 главного направления, бокового корректирующего микродвигателя 32 и корректирующего микродвигателя 33 для управления ориентацией двигательной установки 3, движение целевого мусора 1 подавляется (этап 88). После того как кувыркающееся движение целевого мусора 1 затухает, процесс переходит к процессу торможения (этап 9).
[0080] В процессе захвата (этапы 81-88), например, когда устройство 2 уборки космического мусора не включает в себя фиксирующие лапки 24, как во втором варианте осуществления, процесс может быть остановлен на процессе близкого подведения (этап 86) для близкого подведения устройства 2 уборки космического мусора к целевому мусору 1 посредством намотки провода 46, соединенного с гарпуном 41 после выпуска гарпуна 41 в целевой мусор 1. Также, после проверки, что гарпун 41 пробил целевой мусор 1 (этапы 83-84), последующие процессы (этапы 85-88) могут быть исключены, чтобы переходить к процессу торможения (этап 9). Исключая процессы (этапы 85-88), поскольку необходимость в процессе близкого подведения устройства 2 уборки космического мусора к целевому мусору 1, испытывающему кувыркающееся движение, устраняется, управление положением/скоростью при выполнении близкого подведения, может быть исключено, механизм и вычисление для определения положения/ориентации/скорости устройства 2 уборки космического мусора могут быть упрощены или сделаны более экономными с точки зрения работы, производительность, требуемая для механизма наблюдения/захвата, может быть смягчена, и нагрузки по обработке на контроллер могут быть уменьшены.
[0081] Фиг. 13 иллюстрирует состояние сброса проводящего фала 61 в процессе торможения (этап 9) после подавления движения целевого мусора 1 посредством процесса захвата (этапы 81-88). Таким образом, подавляя движение целевого мусора 1 посредством фиксирующих лапок 24 и двигательной установки 3, проводящий фал 61, сбрасываемый в космос, предохраняется от бесконтрольного перемещения или запутывания, и эффект торможения может устойчиво срабатывать.
[0082] Далее, устройство 2 уборки космического мусора согласно другим вариантам осуществления настоящего изобретения будет описано со ссылкой на фиг. 14-16. Здесь, фиг. 14 - это схематичный чертеж, иллюстрирующий устройство уборки космического мусора согласно четвертому варианту осуществления настоящего изобретения, (а) иллюстрирует вид сзади, (b) иллюстрирует вид в поперечном разрезе В-В на фиг.14(а) и (с) иллюстрирует схематичный чертеж, иллюстрирующий состояние использования. Фиг.15 - это схематичный чертеж, иллюстрирующий устройство уборки космического мусора согласно пятому варианту осуществления настоящего изобретения, (а) иллюстрирует вид сзади, (b) иллюстрирует вид в поперечном разрезе В-В на фиг.15(а) и (с) иллюстрирует схематичный чертеж, иллюстрирующий состояние использования. Фиг.16 - это схематичный чертеж, иллюстрирующий устройство уборки космического мусора согласно шестому варианту осуществления настоящего изобретения, (а) иллюстрирует вид сзади, (b) иллюстрирует вид в поперечном разрезе В-В на фиг.16(a) и (с) иллюстрирует схематичный чертеж, иллюстрирующий состояние использования. Те же знаки привязываются к тем же компонентам, что и в устройстве 2 уборки космического мусора согласно первому-третьему вариантам осуществления, и излишние описания будут исключены.
[0083] В устройстве 2 уборки космического мусора согласно четвертому варианту осуществления, иллюстрированному на фиг.14(а) и (b), тормозное устройство 6 внешним образом прикрепляется к поверхности (части задней поверхности) корпусной части 21. Размещая тормозное устройство 6 снаружи корпусной части 21, может быть обеспечено свободное пространство внутри корпусной части 21, и может быть установлено множество гарпунов 41, используя свободное пространство. Т.е. множество устройств 4 захвата могут быть размещены в корпусной части 21. Например, устройства 4 захвата могут быть расположены в четырех частях по диагональным линиям, как иллюстрировано на фиг. 14(а), могут быть расположены в двух частях по одной диагональной линии, могут быть расположены в трех частях, конфигурирующих вершины треугольника, или могут быть расположены в двух частях параллельно. Формируя избыточные устройства 4 захвата (гарпуны 41) таким образом, даже когда первый гарпун 41 не пронзил целевой мусор 1, гарпун 41 может быть выброшен снова, чтобы захватывать целевой мусор 1, и резервирование функции захвата может быть улучшено.
[0084] В устройстве 2 уборки космического мусора согласно четвертому варианту осуществления, который иллюстрирован на фиг.14(с), после того как гарпун 41 зацепляется с целевым мусором 1, двигательная установка 3 (корректирующий микродвигатель 31 главного направления, боковой корректирующий микродвигатель 32, корректирующий микродвигатель 33 для управления ориентацией) используется, чтобы изменять направление корпусной части 21, тормозное устройство 6 выбрасывается из корпусной части 21, и проводящий фал 61 разворачивается в космос. В этом варианте осуществления тормозное устройство 6 конфигурирует дальнюю концевую часть 62, которая является частью хранения проводящего фала 61, а также имеет мощность двигательной установки. За счет такой конфигурации нет необходимости размещения сложного механизма управления ориентаций в тормозном устройстве 6, и задавая направление выпуска проводящего фала 61 посредством корпусной части 21, отрезания тормозного устройства 6 от корпусной части 21 и формирования реактивной движущей силы, проводящий фал 61 может разворачиваться в желаемое состояние.
[0085] В устройстве 2 уборки космического мусора согласно пятому варианту осуществления, иллюстрированному на фиг.15(а) и (b), тормозное устройство 6 внешним образом прикрепляется к поверхности корпусной части 21, и корпусная часть 21 используется в качестве дальней концевой части 62 тормозного устройства 6. В частности, провод 46 устройства 4 захвата соединяется с задним концом проводящего фала 61 через разъем 63, и проводящий фал 61, и разъем 63 могут помещаться внутрь тормозного устройства 6, прикрепленного к части задней поверхности корпусной части 21. Т.е. устройство 2 уборки космического мусора согласно этому варианту осуществления имеет разъем 63 для соединения проводящего фала 61 и провода 46, и дальняя концевая часть 62 состоит из корпусной части 21. Также, в состоянии хранения гарпуна 41, провод 46 может протягиваться до тормозного устройства 6 в части задней поверхности вдоль части внешней кромки корпусной части 21. Разъем 63 состоит из электрического изолятора, так что статическое электричество или т.п., генерируемое посредством контакта гарпуна 41 и целевого мусора 1, не передается проводящему фалу 61. Также, множество устройств 4 захвата могут быть размещены в корпусной части 21 аналогично четвертому варианту осуществления.
[0086] В устройстве 2 уборки космического мусора согласно пятому варианту осуществления, который иллюстрирован на фиг.15(с), после того как гарпун 41 зацепляется с целевым мусором 1, двигательная установка 3 (корректирующий микродвигатель 31 главного направления, боковой корректирующий микродвигатель 32, корректирующий микродвигатель 33 для управления ориентацией) используется, чтобы изменять направление корпусной части 21, корпусная часть 21 перемещается в направлении, в котором желательно, чтобы был развернут проводящий фал 61 (например, направление к Земле), как необходимо во время выпуска разъема 63 и проводящего фала 61 из тормозного устройства 6 или корпусной части 21, и тормозное устройство 6 отделяется и отрезается от корпусной части 21. Разворачивание ускоряется средством формирования реактивной движущей силы, размещенным в тормозном устройстве 6, и проводящий фал 61 разворачивается в желаемое состояние (например, состояния развернутости в направлении к Земле). Также, средство формирования реактивной движущей силы, которое может управлять ориентацией, может быть установлено в тормозном устройстве 6, чтобы изменять направление или т.п. самому после отделения тормозного устройства 6 от корпусной части 21.
[0087] Когда тормозное устройство 6 не включает в себя средство формирования реактивной движущей силы, проводящий фал 61 может разворачиваться в желаемое состояние посредством перемещения корпусной части 21 в направлении, в котором желательно, чтобы был развернут проводящий фал 61 (например, направление к Земле), в то же время выпуская разъем 63 и проводящий фал 61 из тормозного устройства 6 или корпусной части 21. За счет такой конфигурации, корпусная часть 21 может использоваться в качестве дальней концевой части 62 тормозного устройства 6, и конфигурация тормозного устройства 6 может быть упрощена.
[0088] В устройстве 2 уборки космического мусора согласно шестому варианту осуществления, иллюстрированному на фиг.16(а) и (b), тормозное устройство 6 внешним образом прикрепляется к поверхности корпусной части 21, корпусная часть 21 используется в качестве дальней концевой части 62 тормозного устройства 6, и часть тормозного устройства 6 выполнена с возможностью отделяться от корпусной части 21. В частности, тормозное устройство 6, иллюстрированное в пятом варианте осуществления, делится на множество устройств, которыми являются первое тормозное устройство 6а, второе тормозное устройство 6b, третье тормозное устройство 6с и четвертое тормозное устройство 6d, и тормозные устройства с первого тормозного устройства 6а по четвертое тормозное устройство 6d выполнены с возможностью отделяться (отрезаться) от корпусной части 21 индивидуально. Предпочтительно, чтобы число делений тормозного устройства 6 задавалось так, чтобы быть в однозначном соответствии с устройствами 4 захвата (гарпунами 41).
[0089] В устройстве 2 уборки космического мусора согласно шестому варианту осуществления, который иллюстрирован на фиг.16(с), после того как гарпун 41 зацепляется с целевым мусором 1, двигательная установка 3 (корректирующий микродвигатель 31 главного направления, боковой корректирующий микродвигатель 32, корректирующий микродвигатель 33 для управления ориентацией) используется, чтобы изменять направление корпусной части 21, корпусная часть 21 перемещается в направлении, в котором желательно, чтобы был развернут проводящий фал 61 (например, направление к Земле), как необходимо, в то же время, выпуская разъем 63 и проводящий фал 61 из тормозного устройства 6 (например, первого тормозного устройства 6а), и первое тормозное устройство 6а отделяется и отрезается от корпусной части 21. Разворачивание ускоряется средством формирования реактивной движущей силы, размещенным в первом тормозном устройстве 6а, и проводящий фал 61 разворачивается в желаемое состояние (например, состояния развернутости в направлении к Земле). Также, средство формирования реактивной движущей силы, которое может управлять ориентацией, может быть установлено в первом тормозном устройстве 6а, чтобы изменять направление или т.п. самому после отделения первого тормозного устройства 6а от корпусной части 21.
[0090] Между тем, устройство 2 уборки космического мусора перемещается к следующему целевому мусору 1, используя двигательную установку 3. За счет такой конфигурации, два или более фрагмента целевого мусора 1 могут быть убраны одним устройством 2 уборки космического мусора, и эффективность работы может быть улучшена. Также, когда первое тормозное устройство 6а не включает в себя средство формирования реактивной движущей силы, устройство 2 уборки космического мусора может перемещаться к следующему целевому мусору 1, отделяя и отрезая первое тормозное устройство 6а от корпусной части 21, после того как проводящий фал 61 разворачивается устройством 2 уборки космического мусора.
[0091] В устройстве 2 уборки космического мусора, иллюстрированном на фиг.14-16, пропущены изображения для подробностей устройства 5 наблюдения и устройства 7 подачи энергии, и т.д., однако, они несомненно выполнены с возможностью храниться внутри основной части 21 аналогично первому варианту осуществления.
[0092] Настоящее изобретение не ограничивается вышеописанными вариантами осуществления и, конечно, является по-разному изменяемым в диапазоне, не отклоняющемся от цели настоящего изобретения.
Перечень ссылочных позиций
[0093] 1 Целевой мусор
2 Устройство уборки космического мусора
3 Двигательная установка
4 Устройство захвата
5 Устройство наблюдения
6 Тормозное устройство
7 Устройство для подачи энергии
11 Резервуар (полый фрагмент)
21 Корпусная часть
24 Фиксирующая лапка
41 Гарпун
43 Заостренная концевая часть
43а Зубчатая часть
44 Стопорная часть
45 Часть формирования реактивной движущей силы
46 Провод
47 Цилиндрический корпус (упругий корпус)
47′ Волокнистый корпус (упругий корпус)
48 Устройство намотки провода
61 Проводящий фал
62 Дальняя концевая часть
63 Разъем
71 Панель солнечной батареи

Изобретение относится к космической технике и может быть использовано для уборки космического мусора (КМ). Устройство уборки КМ (УУ КМ), испытывающего беспорядочное кувыркающееся движение, содержит корпус с буферным материалом, фиксирующими лапками, двигательной установкой, устройством захвата с гарпуном, устройством наблюдения за движением КМ и вычисления положения захвата и ориентации захвата, тормозным устройством с проводящим фалом. Гарпун содержит заостренную концевую часть с зубчатой частью, стопорную часть, часть формирования реактивной движущей силы для выброса гарпуна, провод для соединения гарпуна с корпусом, упругий корпус, устройство намотки провода. Выводят на орбиту УУ КМ, осуществляют причаливание УУ КМ к КМ, осуществляют процесс наблюдения и перемещения за КМ, вычисляют положение захвата и ориентацию захвата, перемещают УУ КМ в положение захвата и ориентацию захвата, близко подводят УУ КМ к КМ, выпускают гарпун в полый фрагмент КМ, соединяют УУ КМ и КМ, фиксируют КМ, тормозят захваченный КМ с помощью сброса проводящего фала. Изобретение позволяет упростить прикрепление тормозного устройства к КМ. 2 н. и 14 з.п. ф-лы, 36 ил.
1. Устройство уборки космического мусора, которое убирает с орбиты космический мусор, испытывающий беспорядочное кувыркающееся движение, посредством захвата и торможения космического мусора, содержащее двигательную установку для выполнения управления причаливанием и ориентацией на целевой мусор, который является космическим убираемым мусором; устройство захвата, имеющее гарпун, который может быть выпущен к целевому мусору; устройство наблюдения для наблюдения за движением целевого мусора и вычисления положения захвата и ориентации захвата, при которых гарпун может быть выпущен в полый фрагмент целевого мусора; тормозное устройство, непосредственно или опосредованно соединенное с гарпуном, для торможения целевого мусора; и корпусную часть, на которой установлены двигательная установка, устройство захвата, устройство наблюдения и тормозное устройство, при этом гарпун включает в себя заостренную концевую часть, имеющую зубчатую часть, которая может зацепляться с целевым мусором, стопорную часть, которая должна находиться в контакте с поверхностью целевого мусора, часть формирования реактивной движущей силы для выброса гарпуна, провод для соединения гарпуна с корпусной частью и упругий корпус, расположенный так, чтобы закрывать заостренную концевую часть на передней поверхности стопорной части, и за счет сжатия упругого корпуса между поверхностью целевого мусора и стопорной частью, когда заостренная концевая часть зацеплена с целевым мусором, подавляется разбрасывание отломанных фрагментов, сформировавшихся, когда гарпун проходит насквозь.
2. Устройство уборки космического мусора по п. 1, в котором зубчатая часть выполнена с возможностью закрывания при прохождении через целевой мусор и открывания после прохождения через целевой мусор.
3. Устройство уборки космического мусора по п. 1, в котором множество заостренных концевых частей расположено на поверхности стопорной части, и каждая из заостренных концевых частей выполнена с возможностью втягивания при упирании в положение, в котором заостренная концевая часть не может проникнуть через поверхность целевого мусора.
4. Устройство уборки космического мусора по п. 1, в котором предусмотрено устройство намотки провода, выполненное с возможностью наматывания провода, и за счет наматывания провода после зацепления заостренной концевой части с целевым мусором, корпусная часть близко подводится к целевому мусору.
5. Устройство уборки космического мусора по п. 4, в котором буферный материал для смягчения удара при близком подведении корпусной части к целевому мусору расположен на корпусной части.
6. Устройство уборки космического мусора по п. 4, в котором предусмотрено множество фиксирующих лапок, расположенных с возможностью вращения в корпусной части, и после того как корпусная часть близко подведена к целевому мусору, фиксирующие лапки разворачиваются, чтобы прикреплять корпусную часть к целевому мусору, и движение целевого мусора подавляется с помощью двигательной установки.
7. Устройство уборки космического мусора по п. 1, в котором множество устройств захвата расположено в корпусной части.
8. Устройство уборки космического мусора по п. 1, в котором тормозное устройство включает в себя проводящий фал, сбрасываемый в космос, и дальнюю концевую часть, расположенную на дальнем конце проводящего фала и снабженную средством формирования реактивной движущей силы для формирования реактивной движущей силы.
9. Устройство уборки космического мусора по п. 1, в котором тормозное устройство включает в себя проводящий фал, сбрасываемый в космос, дальнюю концевую часть, расположенную на дальнем конце проводящего фала и снабженную средством формирования реактивной движущей силы для формирования реактивной движущей силы, и разъем для присоединения заднего конца проводящего фала к проводу, при этом провод соединен с корпусной частью через проводящий фал и дальнюю концевую часть.
10. Устройство уборки космического мусора по п. 8 или 9, в котором проводящий фал присоединен так, чтобы отделяться от корпусной части.
11. Устройство уборки космического мусора по п. 8 или 9, в котором дальняя концевая часть сконфигурирована корпусной частью.
12. Способ уборки космического мусора, который убирает с обриты космический мусор, испытывающий беспорядочное кувыркающееся движение, посредством захвата и торможения космического мусора, включающий процесс вывода на орбиту, на котором выводят устройство уборки космического мусора на орбиту целевого мусора, который является космическим убираемым мусором; процесс причаливания, на котором выполняют причаливание устройства уборки космического мусора к целевому мусору; процесс наблюдения и перемещения, на котором наблюдают за движением целевого мусора, после того как устройство уборки космического мусора достигает положения наблюдения, вычисляют положение захвата и ориентацию захвата, при которых гарпун может быть выпущен в целевой мусор, и перемещают устройство уборки космического мусора в положение захвата и ориентацию захвата; процесс захвата, на котором выпускают гарпун в целевой мусор и соединяют устройство уборки космического мусора и целевой мусор; и процесс торможения, на котором затормаживают целевой мусор посредством устройства уборки космического мусора, при этом гарпун включает в себя заостренную концевую часть, имеющую зубчатую часть, которая может зацепляться с целевым мусором, стопорную часть, которая должна находиться в контакте с поверхностью целевого мусора, часть формирования реактивной движущей силы для выброса гарпуна, провод для соединения гарпуна с корпусной частью и упругий корпус, расположенный так, чтобы закрывать заостренную концевую часть на передней поверхности стопорной части, и за счет сжатия упругого корпуса между поверхностью целевого мусора и стопорной частью, когда заостренная концевая часть зацеплена с целевым мусором, подавляется разбрасывание отломанных фрагментов, сформировавшихся, когда гарпун проходит насквозь.
13. Способ уборки космического мусора по п. 12, в котором процесс захвата включает процесс близкого подведения, на котором наматывают провод, соединенный с гарпуном, после того как гарпун выпущен в целевой мусор, и близко подводят устройство уборки космического мусора к целевому мусору.
14. Способ уборки космического мусора по п. 13, в котором процесс захвата включает процесс фиксации, на котором разворачивают фиксирующие лапки, расположенные на устройстве уборки космического мусора, и сцепляют с целевым мусором, после того как устройство уборки космического мусора близко подведено к целевому мусору, и процесс подавления движения, на котором подавляют движение целевого мусора посредством двигательной установки, расположенной в устройстве уборки космического мусора.
15. Способ уборки космического мусора по п. 12, в котором процесс наблюдения и перемещения вычисляет положение захвата и ориентацию захвата с тем, чтобы выпустить гарпун в полый фрагмент целевого мусора.
16. Способ уборки космического мусора по п. 12, в котором процесс торможения является процессом, на котором затормаживают целевой мусор посредством сброса проводящего фала из устройства уборки космического мусора в космос.
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ ПАССИВНЫХ КА И ИХ ФРАГМЕНТОВ | 1998 |
|
RU2141436C1 |
| WO 2011066233 A2, 03.06.2011 | |||
| КОСМИЧЕСКИЙ САЧОК | 1991 |
|
RU2046081C1 |
| JP 2010285137 A, 24.12.2010. | |||

