Область техники, к которой относится изобретение
[0001] Данное изобретение относится к устройству для удаления обломков и к способу удаления обломков, и в частности к устройству для удаления обломков и к способу удаления обломков, которые пригодны для удаления обломков, дрейфующих в космосе, таких как спутники и ракеты, которые больше не используются и вращаются вокруг Земли.
Уровень техники
[0002] В настоящее время искусственные спутники, такие как военные спутники, спутники связи, научные спутники, разведывательные спутники и навигационные спутники, находятся на орбитах для различных целей. Когда искусственные спутники выходят из строя и больше не работают, или завершают свою миссию и достигают конца своего срока службы, то искусственные спутники часто оставляются на орбите, образуя обломки (космический мусор). Дополнительно к этому, остатки ракет и т.п., используемых для запуска искусственных спутников и т.п., также остаются в виде обломков на орбите. В настоящее время несколько тысяч кусков или более обломков находятся на орбитах и входят в стадию самоумножения, когда число осколков увеличивается вследствие естественных столкновений. Для предотвращения самоумножения обломков, необходимо удалять по меньшей мере примерно пять обломков в год. Обломки притягиваются за счет земного притяжения и иногда падают и исчезают, однако естественное падение требует длительных промежутков времени, и является не эффективным. В этой связи уже предлагались способы активного удаления обломков.
[0003] В способе удаления обломков, описание которого приведено в патентной публикации 1, из пленочного материала, имеющего круглую или прямоугольную форму, образовано устройство для приема ничтожного количества давления воздуха и солнечного излучения, и это принимающее давление устройство прикреплено с помощью шнура к обломкам, уже вращающимся на орбитах, или к космическому аппарату, подлежащему последующему запуску. Таким образом, космические обломки или космический аппарат, который используется, вынужденно падает на землю или изменяет свою орбиту для защиты важной орбиты. В то же время, в способе удаления обломков, описание которого приведено в патентной публикации 2, устройство для удаления обломков наблюдает за движением целевых обломков и вычисляет положение захвата и ориентацию захвата, в которых может быть выстрелен гарпун в целевые обломки. Затем устройство для удаления обломков движется для занятия положения захвата и ориентации захвата, определяемые посредством вычислений, и затем выстреливается гарпун в целевые обломки. После этого обломки замедляются.
Цитируемые источники
[0004] Патентная публикация 1: Публикация заявки на японский патент № 2010-285137
Патентная публикация 2: Международная публикация № WO2013/065795
Сущность изобретения
Техническая задача
[0001] В каждом из указанных выше патентных публикациях 1 и 2 способ, в котором гарпун выстреливается в обломки, предлагается в качестве способа прикрепления к обломкам принимающего давление устройства. Способ, в котором выстреливается гарпун, является предпочтительным тем, что обломки можно захватывать в удаленном месте, однако требуется генерировать кинетическую энергию, которая необходима для проникновения гарпуна в обломки при выстреливании гарпуна. В соответствии с этим, избыточная сила реакции генерируется в спутнике, с которого выстреливается гарпун, и поэтому прочность спутника должна быть увеличена, что приводит к увеличению веса. Дополнительно к этому, может возникать другая проблема, связанная с невозможностью точного захвата обломков, поскольку гарпун может пройти мимо обломков, может отскочить от поверхности обломков, или же гарпун может пройти полностью насквозь через обломки.
[0006] Данное изобретение выполнено, исходя из указанных выше недостатков, и целью данного изобретения является создание устройства для удаления обломков и способа удаления обломков, которые способны уменьшать силу реакции, создаваемую при выстреле гарпуна, и обеспечивают точный захват обломков.
Решение задачи
[0007] Согласно одному аспекту изобретения, предлагается устройство для удаления обломков для захвата дрейфующих в космосе обломков и удаления обломков с орбиты, при этом устройство для удаления обломков включает: концевую массу, выполненную с возможностью приближения к обломкам, подлежащим удалению; захватывающее обломки устройство, установленное с возможностью отделения на концевой массе; и фал, соединяющий друг с другом захватывающее обломки устройство и концевую массу, при этом захватывающее обломки устройство включает гарпун, способный проникать в обломки, стреляющее устройство для выстреливания гарпуна, направляющий элемент, расположенный с возможностью вхождения в контакт с поверхностью обломков, для регулирования угла выстреливания гарпуна относительно поверхности обломков, и переключатель, который передает сигнал выстреливания в стреляющее устройство, и, после проникновения гарпуна в обломки, концевая масса отделяется от захватывающего обломки устройства, и фал выпускается в космос.
Преимущества изобретения
[0008] В соответствии с этим устройством для удаления обломков, гарпун не выстреливается в удаленной точке, и угол выстреливания гарпуна регулируется посредством приближения захватывающего обломки устройства к обломкам и посредством приведения направляющего элемента в контакт с поверхностью обломков, так что гарпун можно выстреливать при подходящем угле выстреливания в положении вблизи поверхности обломков. Поэтому можно уменьшать необходимую кинетическую энергию при выстреливании в обломки, и может быть уменьшена сила реакции. Дополнительно к этому, поскольку гарпун выстреливается после регулирования угла выстреливания в положении вблизи обломков, может быть уменьшена вероятность промаха гарпуном обломков, отскакивания гарпуна или прохождения полностью через обломки, так что обломки можно точно захватывать.
Краткое описание чертежей
[0009] На чертежах изображено:
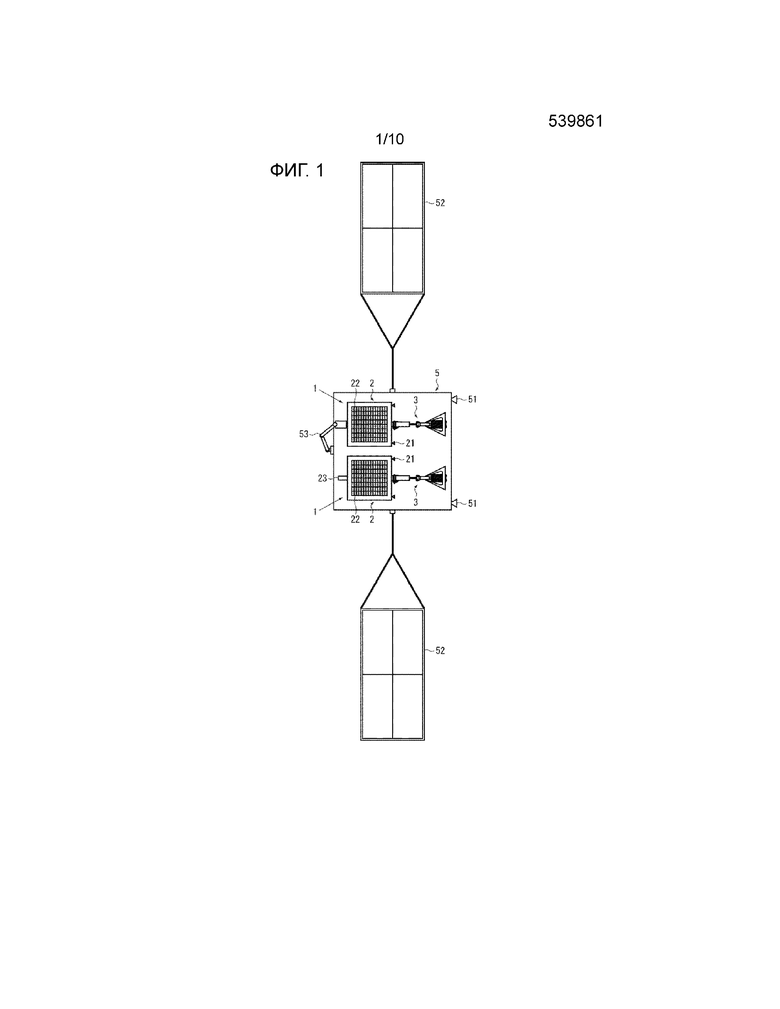
фиг. 1 - устройство для удаления обломков, согласно первому варианту выполнения данного изобретения, в состоянии, когда устройство для удаления обломков размещено в космическом корабле-носителе, на виде сверху;
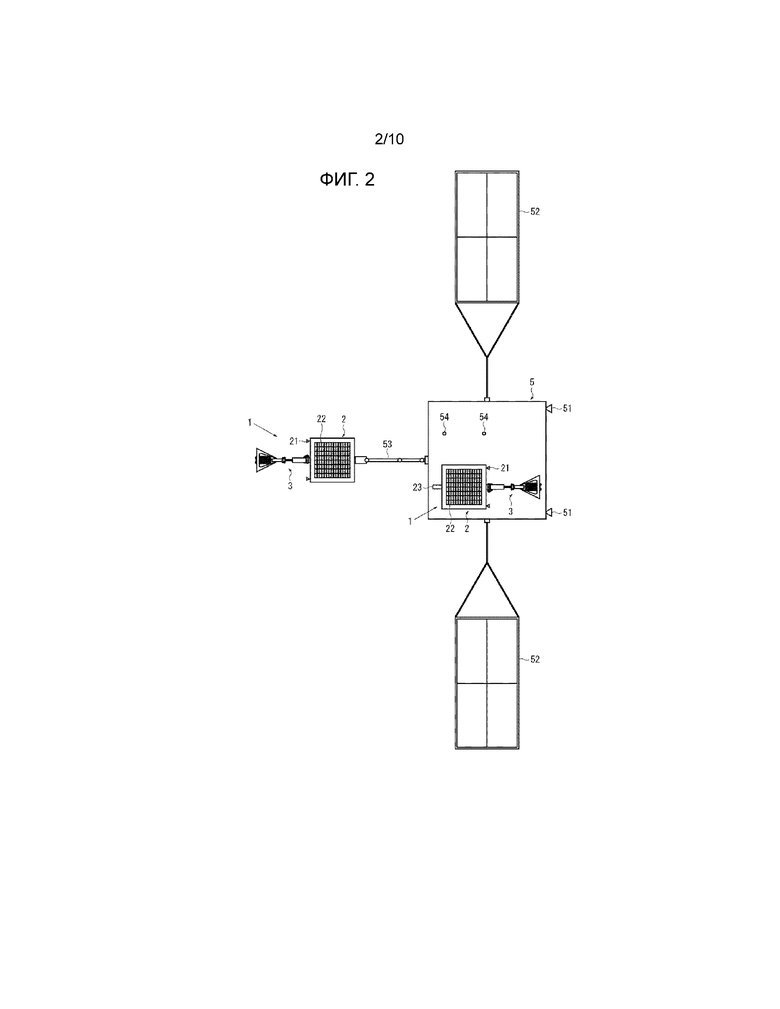
фиг. 2 - состояние, в котором показанное на фиг. 1 устройство для удаления обломков принимает ориентацию захвата;
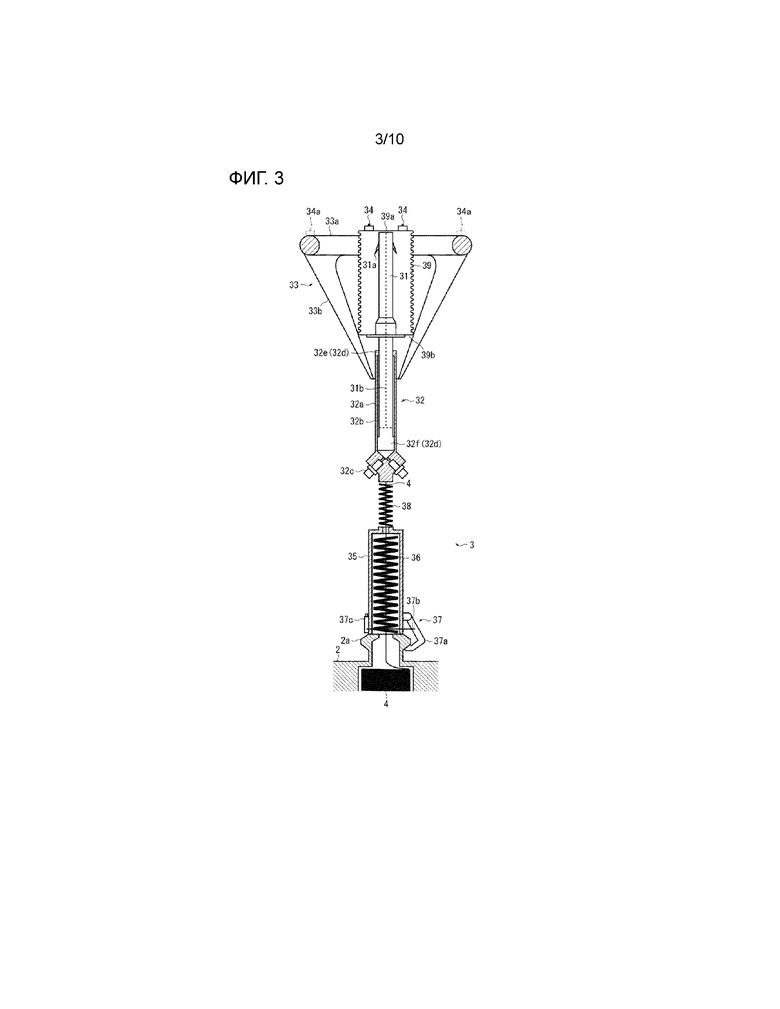
фиг. 3 - частичный разрез захватывающего обломки устройства показанного на фиг. 1 устройства для удаления обломков;
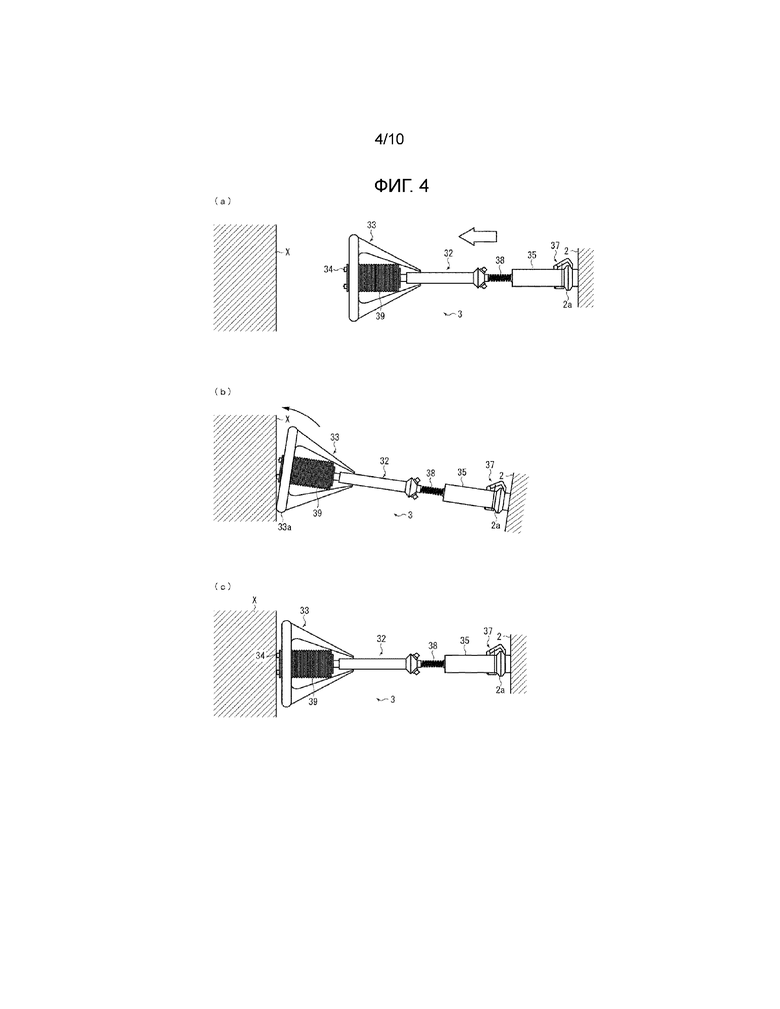
фиг. 4 - операции захватывающего обломки устройства, при этом в части (а) показано состояние сближения, в части (b) показано состояние регулирования угла выстреливания, и в части (с) показано состояние завершения регулирования угла выстреливания;
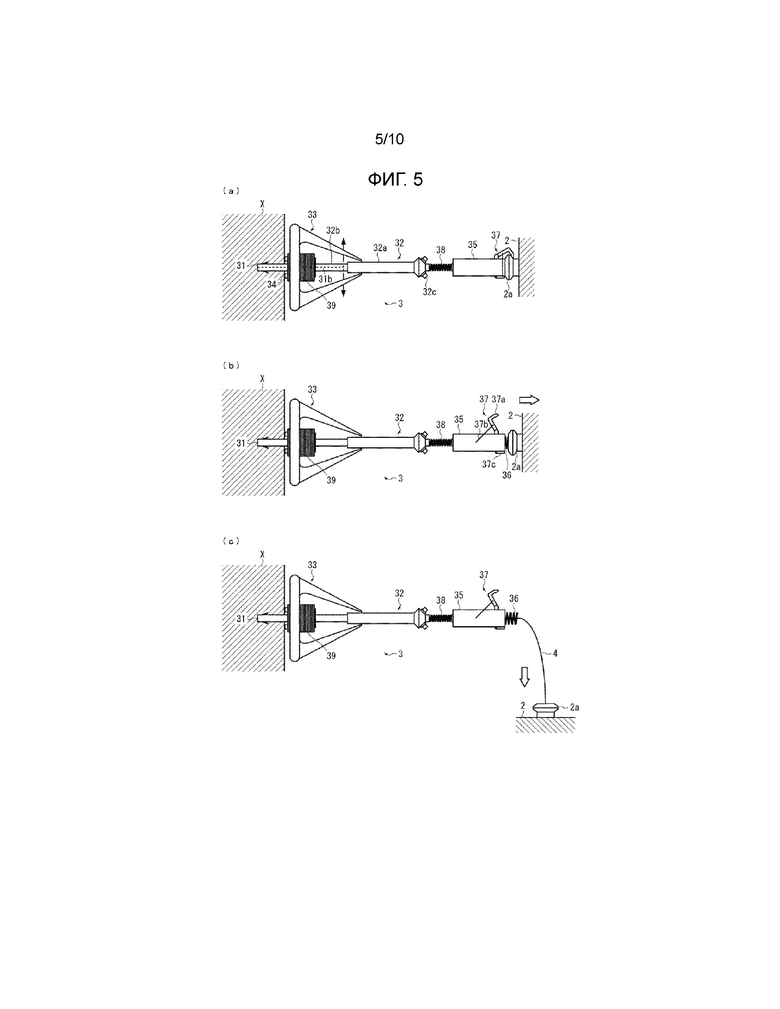
фиг. 5 - операции захватывающего обломки устройства, при этом в части (а) показано состояние выстреливания, в части (b) показано состояние отделения концевой массы, и в части (с) показано состояние выпускания фала;
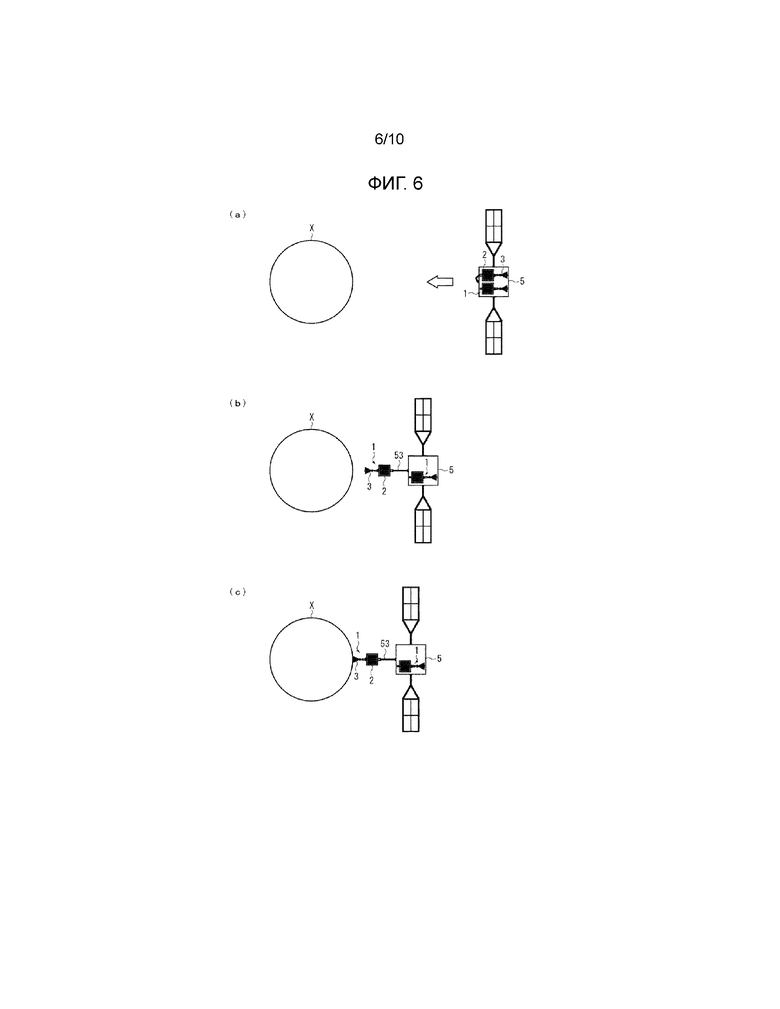
фиг. 6 - операции захватывающего обломки устройства, при этом в части (а) показано состояние движения, в части (b) показано состояние сближения, и в части (с) показано состояние захвата;
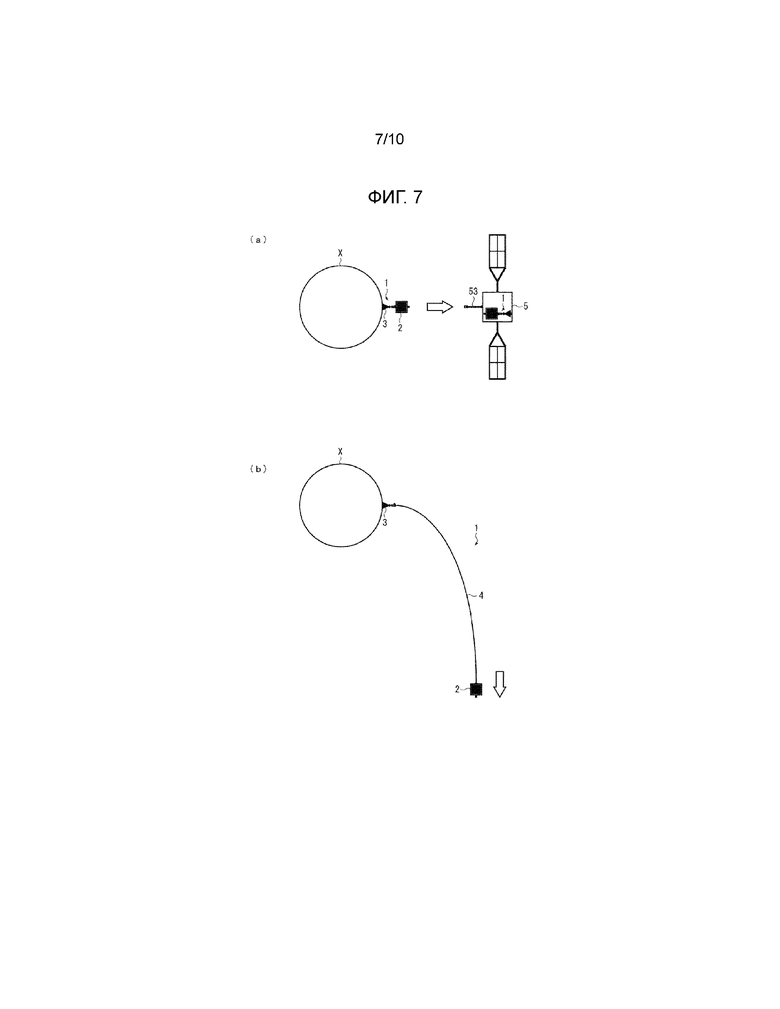
фиг. 7 - операции устройства для удаления обломков, при этом в части (а) показано исходное состояние, и в части (b) показано состояние выпускания фала;
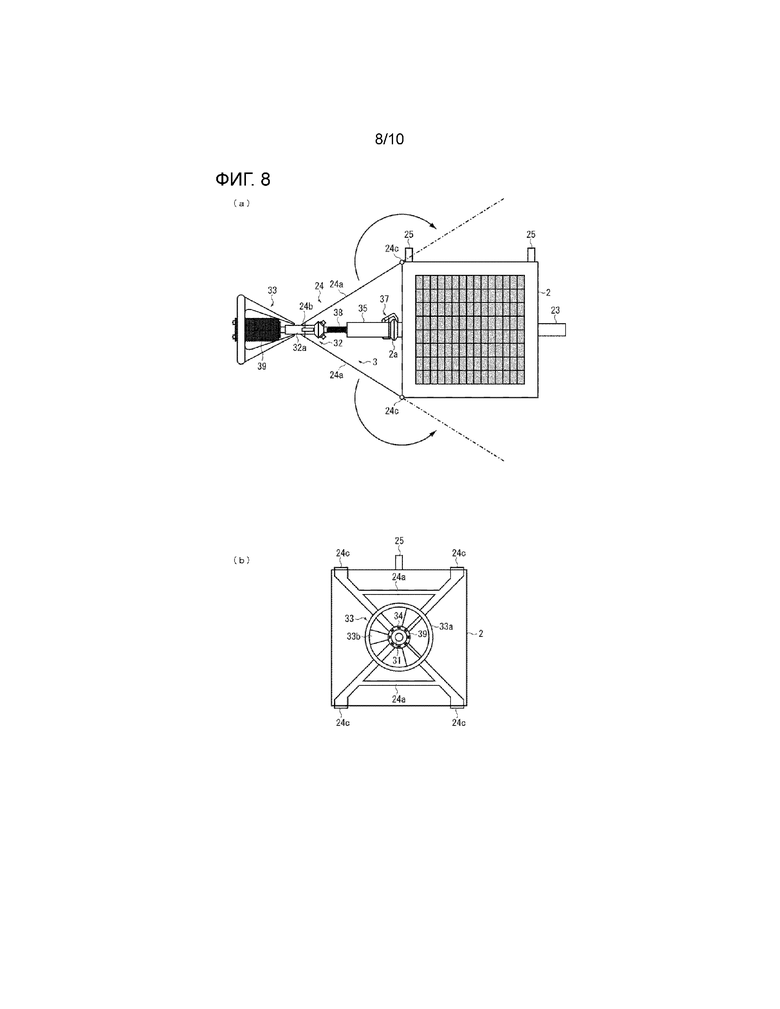
фиг. 8 - устройство для удаления обломков, согласно второму варианту выполнения данного изобретения, при этом в части (а) показан вид сбоку, и в части (b) показан вид спереди;
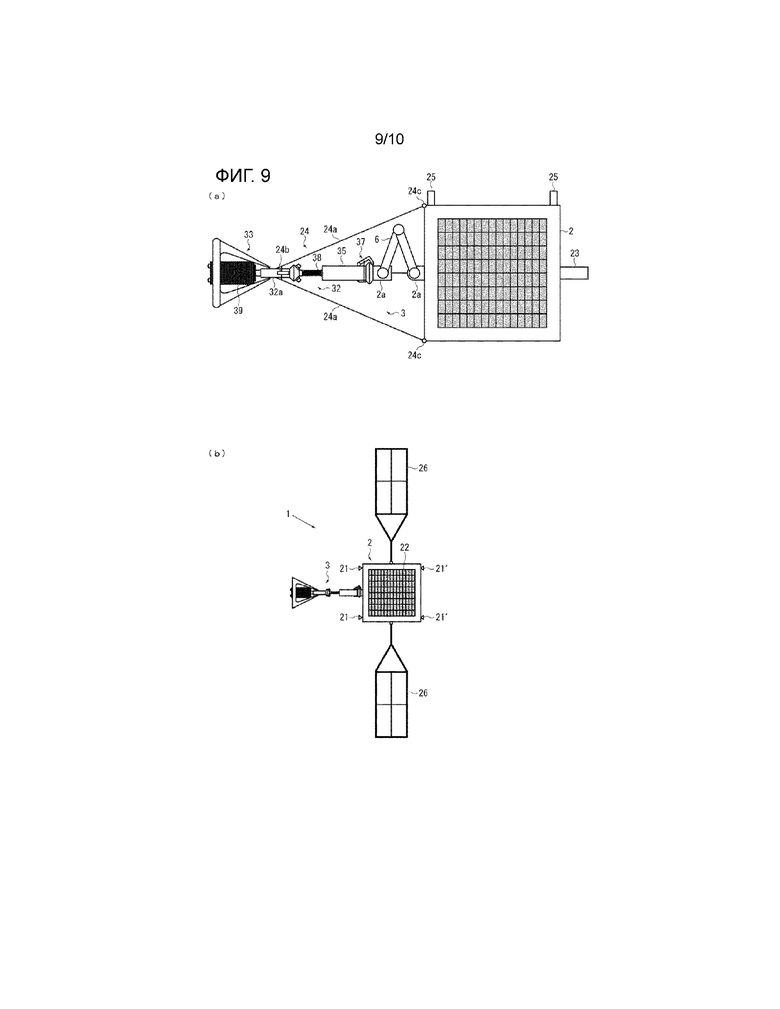
фиг. 9 - устройства для удаления обломков, согласно другим вариантам выполнения данного изобретения, при этом в части (а) показан третий вариант выполнения, и в части (b) показан четвертый вариант выполнения;
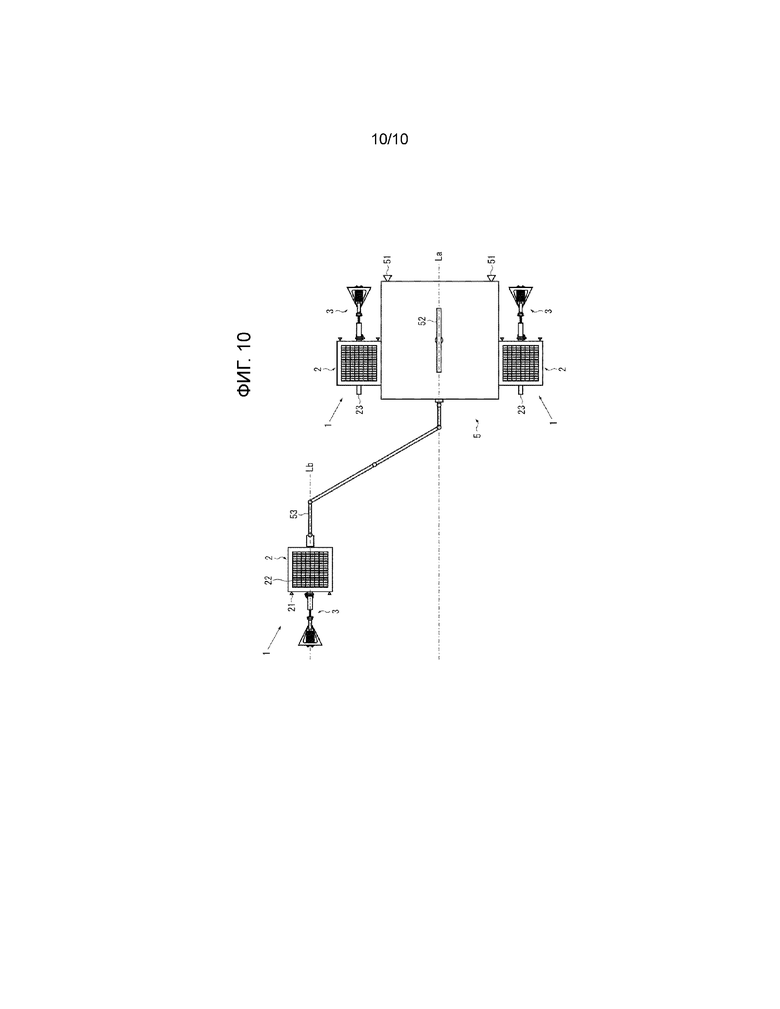
фиг. 10 - устройство для удаления обломков, согласно пятому варианту выполнения данного изобретения.
Описание вариантов выполнения
[0010] Ниже приводится описание нескольких вариантов выполнения данного изобретения со ссылками на фиг. 1-10. На фиг. 1 показаны на виде сверху устройства для удаления обломков, согласно первому варианту выполнения данного изобретения, в состоянии расположения на космическом корабле-носителе. На фиг. 2 показано состояние, в котором показанное на фиг. 1 устройство для удаления обломков принимает ориентацию захвата. На фиг. 3 показано в частичном продольном разрезе захватывающее обломки устройство показанного на фиг. 1 устройства для удаления обломков.
[0011] Устройство 1 для удаления обломков, согласно первому варианту выполнения данного изобретения, является устройством, которое захватывает дрейфующие в космосе обломки и удаляет обломки с орбиты. Как показано на фиг. 1-3, устройство 1 для удаления обломков включает: концевую массу 2, предназначенную для сближения с подлежащими удалению обломками Х; захватывающее обломки устройство 3, установленное с возможность отделения на концевой массе 2; и фал 4, соединяющий друг с другом захватывающее обломки устройство 3 и концевую массу 2. Захватывающее обломки устройство 3 включает: гарпун 31, способный проникать в обломок Х; стреляющее устройство 32 для выстреливания гарпуна 31; направляющий элемент 33; и переключатели 34, которые передают сигнал выстреливания в стреляющее устройство 32. Направляющий элемент 33 расположен с возможностью вхождения в контакт с поверхностью обломков Х и регулирования угла выстреливания гарпуна 31 относительно поверхности обломков Х. После проникновения гарпуна 31 в обломки Х, устройство 1 для удаления обломков отделяет концевую массу 2 от захватывающего обломки устройства 3 для выпускания фала 4 в космос.
[0012] Концевая масса 2 является массивным телом для развертывания фала в космосе посредством использования силы тяжести, действующей на саму концевую массу, тяги ракетного двигателя или т.п. Концевую массу 2 можно также использовать в качестве контейнера, в котором размещено управляющее устройство захватывающего обломки устройства 3, фал 4 и т.п. Например, как показано на фиг. 3, фал 4 размещается в концевой массе 2 в смотанном в катушку состоянии, и концевая масса 2 имеет выходное отверстие 2а, через которое фал 4 выпускается наружу.
[0013] Концевая масса 2 может включать движительную систему 21 (например, реактивный двигатель малой тяги или т.п.) для управления направлением движения и ориентацией концевой массы 2 во время развертывания фала 4. Может быть предусмотрена панель 22 солнечных элементов на поверхности концевой массы 2. Панель 22 солнечных элементов образует устройство генерирования солнечной энергии (источник электроснабжения) для подачи электроэнергии в захватывающее обломки устройство 3. Следует отметить, что движительная система 21 и источник электроснабжения не ограничиваются показанными на фигурах конфигурациями, и могут также отсутствовать.
[0014] Например, устройство 1 для удаления обломков движется в виде небольшого спутника, установленного на корабле-носителе 5, как показано на фиг. 1. Корабль-носитель 5 включает, например, движительную систему 51, такую как реактивный двигатель малой тяги, опоры 52 для солнечных элементов, которые подают электроэнергию, руку 53 робота, которая удерживает и перемещает устройство 1 для удаления обломков, и фиксирующую часть 54 (например, открывающиеся части) для фиксации концевой массы 2 на корабле-носителе 5, как показано на фиг. 1 и 2. Установка устройства 1 для удаления обломков (концевой массы 2) на корабле-носителе 5, включая движительную систему 51, как указывалось выше, может устранять необходимость в движительной системе и в большом источнике электроснабжения в устройстве 1 для удаления обломков, так что устройство 1 для удаления обломков может быть упрощено и иметь меньший вес. Следует отметить, что, например, два устройства 1 для удаления обломков могут быть предусмотрены как на верхней поверхности, так и на нижней поверхности корабля-носителя 5 (всего четыре устройства 1 для удаления обломков); однако положения и количество устройств 1 для удаления обломков не ограничиваются этим.
[0015] Дополнительно к этому, концевая масса 2 включает захватную часть 23 на задней концевой части для удерживания с помощью руки 53 робота. Форма захватной части 23 не ограничивается показанной на фигурах формой, если рука 53 робота может удерживать захватную часть 23, имеющую такую форму. Корабль-носитель 5 движется в состоянии, когда устройства 1 для удаления обломков расположены посредством фиксации на его поверхностях, как показано на фиг. 1, пока не возникает необходимость захвата обломков Х. Когда корабль-носитель 5 приближается к обломкам Х и начинает операцию захвата, то корабль-носитель 5 приводит в действие руку 53 робота для отделения концевой массы 2 от поверхности корабля-носителя 5. Затем, посредством линейного удлинения руки 53 робота и ориентации вперед (посредством удлинения руки 53 робота вперед), определяется положение устройства 1 для удаления обломков в состоянии, когда передний конец (в направлении выстреливания гарпуна 31) устройства 1 для удаления обломков направлен вперед, как показано на фиг. 2.
[0016] Дополнительно к гарпуну 31, стреляющему устройству 32, направляющему элементу 33 и переключателям 34, захватывающее обломки устройство 3 включает следующие компоненты, как показано на фиг. 3. А именно, захватывающее обломки устройство 3 включает корпус 35, соединенный с выходным отверстием 2а для фала, цилиндрическую пружину 36, размещенную в корпусе 35, и запирающее устройство 37 для фиксации корпуса 35 на выпускном отверстии 2а для фала. Дополнительно к этому, захватывающее обломки устройство 3 включает буфер 38, предусмотренный между стреляющим устройство 32 и корпусом 35.
[0017] Корпус 35 имеет по существу трубчатую форму и имеет диаметр, который обеспечивает возможность вхождения в контакт корпуса 35 с передней концевой поверхностью выходного отверстия 2а для фала. Задняя концевая часть корпуса 35 находится в контакте с передней концевой поверхностью выходного отверстия 2а для фала, и открыто назад. Дополнительно к этому, в корпусе 35 размещена цилиндрическая пружина 36 в сжатом состоянии, и задний конец цилиндрической пружины 36 находится в контакте с передней концевой поверхностью выходного отверстия 2а для фала, через отверстие корпуса 35. Запирающее устройство 37 включает: крюк 37а, способный входить в зацепление с кольцевым выступом на наружной окружной поверхности передней концевой части выходного отверстия 2а для фала; проволоку 37b, которая удерживает крюк 37а в состоянии зацепления; и резак 37с, который разрезает проволоку 37b. Следует отметить, что форма и конфигурация запирающего устройства 37 приведены лишь в качестве примера и не ограничиваются формой и конфигурацией, показанными на чертежах.
[0018] Проволока 37b соединена с крюком 37а для удерживания в состоянии зацепления крюка 37 с выходным отверстием 2а для фала. Для отделения концевой массы 2 от захватывающего обломки устройства 3, запирающее устройство 37 вызывает разрезание с помощью резака 37с проволоки 37b и прекращение сдерживания крюка 37а. При прекращении сдерживания крюка 37а, сила напряжения цилиндрической пружины 36 приводит к отходу крюка от выходного отверстия 2а для фала, и выходное отверстия 2а для фала отталкивается назад, так что концевая масса 2 отделяется от захватывающего обломки устройства 3.
[0019] Стреляющее устройство 32 включает: цилиндр 32а, который ограничивает направление движения гарпуна 31; поршень 32b введенный в цилиндр 32а; несколько пиротехнических клапанов 32с, предусмотренных на заднем конце цилиндра 32а; и стопорный механизм 32d. При приеме сигнала выстреливания от переключателей 34, пиротехнические клапаны 32с выпускают газ в цилиндр 32а для толкания поршня 32d вперед. Такая конфигурация стреляющего устройства 32 является лишь примером, и можно использовать, например, конфигурации с использованием электродвигателя или т.п. Дополнительно к этому, может быть предусмотрен лишь один пиротехнический клапан 32с, или же может применяться конфигурация с использованием другой пиротехники.
[0020] Гарпун 31 соединен с передним концом поршня 32b. Гарпун 31 является имеющим форму стержня компонентом, имеющим диаметр, позволяющий гарпуну 31 проникать в обломки Х, и имеет несколько зубцов 31а в передней концевой части. Предусмотрение зубцов 31а обеспечивает возможность исключения выхода гарпуна 31, входящего в обломки Х. Следует отметить, что передняя концевая часть гарпуна 31 может быть заострена, или же может иметь форму, аналогичную форме переднего конца дырокола или режущего инструмента.
[0021] Стопорный механизм 32d устанавливает глубину проникновения гарпуна 31 от поверхности обломков Х. Стопорный механизм 32d включает, например, стенную часть 32е, образованную в переднем конце цилиндра 32а, и имеющую больший диаметр часть 32f, образованную в заднем конце поршня 32b. Когда стреляющее устройство 32 выстреливает гарпун 31, то эта конфигурация обеспечивает блокирование имеющей больший диаметр части 32f поршня 32b стенной частью 32е цилиндра 32а, так что предотвращается отделение и выход гарпуна 31 из стреляющего устройства 32. Другими словами, дистанцию (ход) выстреливания гарпуна 31 можно задавать с помощью расстояния между стенной частью 32е и имеющей больший диаметр частью 32f, так что может быть установлена глубина проникновения гарпуна 31 от поверхности обломков Х. Следует отметить, что положение имеющий больший диаметр части 32f не ограничивается задним концом поршня 32b, и имеющая больший диаметр часть 32f может быть образована в промежуточной части поршня 32b в соответствии с требуемой глубиной проникновения гарпуна 31.
[0022] Дополнительно к этому, может быть образован путь 31b прохождения потока для выпуска газа в зоне от переднего конца гарпуна 31 до поршня 32b. Путь 31b потока может быть образован с прохождением вдоль оси гарпуна 31 и поршня 32b, и с отклонением в промежуточной части поршня 32b в направлении боковой поверхности поршня 32b. Даже когда некоторое количество газа проникает внутрь обломков Х, эта конфигурация обеспечивает возможность выпуска газа изнутри обломков Х в космос снаружи обломков Х через путь 31b потока за счет проникновения гарпуна 31 в обломки Х, так что может быть исключено возникновение взрывов обломков Х, пожара и т.п. Следует отметить, что путь 31b потока может отсутствовать.
[0023] Дополнительно к этому, захватывающее обломки устройство 3 может включать предотвращающий разброс кожух (например, сильфон 39), который закрывает наружную периферию гарпуна 31, и имеет открывающуюся часть (переднюю концевую часть 39а), расположенную впереди переднего конца гарпуна 31. Сильфон 39 является эластичным телом, имеющим сложенную как в аккордеоне часть, выполненную из меди, например, в боковой части его поверхности, и предназначенную для растягивания и сжатия в осевом направлении гарпуна 31. Задняя концевая часть 39b сильфона 39 имеет донную часть, и задняя концевая часть 39b герметично закрыта посредством соединения донной части с гарпуном 31. Следует отметить, что предотвращающий разброс кожух не ограничивается показанным сильфоном 39, а может быть образован эластичным телом, таким как губка.
[0024] В соответствии с этим, когда гарпун 31 проникает в обломки Х, то передняя концевая часть 39а сильфона 39 остается в поверхности обломков Х, в то время как задняя концевая часть 39b сильфона 39 движется вместе с гарпуном 31. Поэтому сильфон 39 сжимается в осевом направлении. В частности, когда гарпун 31 проникает в обломки Х, то сильфон 39 упирается в поверхность обломков Х и образует закрытое пространство, окруженное поверхностью обломков Х, а также частью боковой поверхности и задней концевой частью 39b сильфона 39. Следовательно, возможно подавление разброса фрагментов или т.п. обломков Х, образующихся при проникновении гарпуна 31 в обломки Х, и подавление образования новых кусков обломков. Следует отметить, что для предотвращения выпуска газа в сильфон 39, путь 31b потока для выпуска газа предпочтительно продлен до части, которая находится позади задней концевой части 39b сильфона 39, и которая является частью поршня 32b, выходящей из цилиндра 32а, принимающей открытое состояние, когда гарпун 31 проникнул в обломки Х.
[0025] Несколько переключателей 34 предусмотрены в передней концевой части 39а сильфона 39 (в частности, в периферийной части, задающей отверстие). Например, для определения состояния, в котором передняя концевая часть 39а сильфона 39 расположена параллельно и напротив поверхности обломков Х, предпочтительно предусмотрение по меньшей мере трех или больше переключателей 34. Предусмотрение переключателей 34 в передней концевой части 39а сильфона 39, как указывалось выше, обеспечивает возможность обнаружения состояния, когда сильфон 39 расположен параллельно и противоположно поверхности обломков Х. Затем, при проникновении гарпуна 31 в обломки Х в этом состоянии, можно регулировать угол выстреливания гарпуна 31 внутри подходящего диапазона, а также обеспечивать образование закрытого пространства.
[0026] Переключатели 34 являются компонентами, которые обнаруживают состояние, когда передняя концевая часть 39а сильфона 39 находится в контакте с поверхностью обломков Х. Переключатели 34 являются так называемыми микропереключателями, которые могут быть чувствительными к давлению или электрическими. Переключатели 34 соединены с пиротехническими клапанами 32с стреляющего устройства 32 с помощью кабелей (не изображены). В данном случае, когда передняя концевая часть 39а сильфона 39 входит в контакт с поверхностью обломков Х, то переключатели 34 посылают сигнал выстреливания в пиротехнические клапаны 32с. Следует отметить, что положения, в которых предусмотрены переключатели 34, не ограничиваются передним концом сильфона 39, и переключатели 34 могут быть расположены на переднем конце направляющего элемента 33, или могут быть расположены на переднем конце специального направляющего элемента, опирающегося на захватывающее обломки устройство 3. Дополнительно к этому, любое из этих расположений можно комбинировать по потребности. В случае, когда переключатели 34 предусмотрены на переднем конце (например, в положении переключателей 34, показанных на фиг. 3 штриховыми линиями) направляющего элемента 33, то расстояние между переключателями 34 может быть установлено большим, и поэтому состояние, когда сильфон 39 расположен параллельно и противоположно поверхности обломков Х, можно определять более точно, чем в случае, когда переключатели 34 предусмотрены на переднем конце сильфона 39.
[0027] Дополнительно к этому, снаружи сильфона 39 предусмотрен направляющий элемент 33. Направляющий элемент 33 включает, например, кольцевую часть 33а, расположенную на переднем конце, и поддерживающую кольцевую часть 33а лучевую часть 33b, которая имеет снаружи по существу форму кругового конуса, имеющего больший диаметр на стороне переднего конца. Например, внутренний диаметр кольцевой части 33а больше диаметра сильфона 39, и плоскость, задающая передний конец кольцевой части 33а, по существу перпендикулярна осям гарпуна 31 и поршня 32b. Кроме того, передняя концевая часть 39а сильфона 39 может быть расположена по существу заподлицо с плоскостью, задаваемой передним концом кольцевой части 33а, или может выступать слегка вперед из плоскости, задаваемой передним концом кольцевой части 33а. Задняя концевая часть лучевой части 33b закреплена, например, на цилиндре 32а стреляющего устройства 32. Следует отметить, что кольцевая часть 33а может иметь круглую цилиндрическую форму или форму четырехугольного кольца. Кроме того, форма кольцевой части 33а не ограничивается кольцевой формой, и кольцевая часть 33а может включать несколько элементов, которые расположены на расстоянии друг от друга в окружном направлении, и каждый из которых имеет, например, форму стержня, форму пластины, сферическую форму или т.п.
[0028] В соответствии с этим, когда захватывающее обломки устройство 3 приближается под углом к поверхности обломков Х (находясь в состоянии, когда оси гарпуна 31 и поршня 32b наклонены от поверхности обломков Х), то кольцевая часть 33а направляющего элемента 33 входит первой в контакт с поверхностью обломков Х, затем, при сближении захватывающего обломки устройства 3 с обломками Х, направляющий элемент 33 поворачивается за счет точки контакта направляющего элемента 33 (вокруг точки контакта) и управляет ориентацией захватывающего обломки устройства 3 так, что вся кольцевая часть 33а может входить в контакт с поверхностью обломков Х. Другими словами, направляющий элемент 33 действует в качестве механизма самовыравнивания захватывающего обломки устройства 3 и регулирует угол выстреливания гарпуна 31 относительно поверхности обломков Х. Следует отметить, что возможно предусмотрение легкого изгиба буфера 38, как будет пояснено ниже, для облегчения управления ориентацией захватывающего обломки устройства 3.
[0029] Фал 4, размещенный в концевой массе 2, проходит через выходное отверстие 2а для фала, и соединен с задней концевой частью стреляющего устройства 32 (цилиндра 32а). Буфер 38 (например, пружина или т.п.), который уменьшает удар, создаваемый при выстреливании гарпуна 31, может быть предусмотрен между стреляющим устройством 32 (цилиндром 32а) и корпусом 35. Предусмотрение буфера 38 обеспечивает возможность поглощения силы реакции, создаваемой, когда гарпун 31 выстреливается посредством зажигания пиротехнических клапанов 32с. Следует отметить, что буфер 38 не ограничивается пружиной, а может быть эластичным телом, таким как резина. Дополнительно к этому, как указывалось выше, буфер 38 может иметь также функцию поддержки самовыравнивания захватывающего обломки устройства 3.
[0030] После проникновения гарпуна 31 в обломки Х, концевая масса 2 отделяется от захватывающего обломки устройства 3, так что фал 4 выпускается в космос и разворачивается. Фал 4 является электрически проводящим, и сила Лоренца действует на фал 4 на основе взаимодействия между электрическим током, проходящим через фал 4, и магнитным полем, создаваемым за счет развертывания фала 4. Следовательно, фал 4 тянется, например, в направлении, противоположном направлению движения обломков Х, так что обломки Х могут тормозиться. Следует отметить, что хотя это и не показано, возможно удаление обломков Х с загрязненной орбиты посредством развертывания фала в противоположном направлении (например, в направлении от Земли), с целью тяги и ускорения обломков Х в направлении движения и перемещения обломков Х на более высокую орбиту. Концевая часть фала 4 или концевая масса 2 могут быть снабжены излучателем электронов или коллектором электронов для активного обмена электронами с окружающим космосом.
[0031] Ниже приводится описание работы захватывающего обломки устройства 3 со ссылками на фиг. 4а-5с. На фиг. 4 показаны операции захватывающего обломки устройства, при этом в части (а) показано состояние сближения, в части (b) показано состояние регулирования угла выстреливания, и в части (с) показано состояние завершения регулирования угла выстреливания. На фиг. 5 показаны операции захватывающего обломки устройства, при этом в части (а) показано состояние выстреливания, в части (b) показано состояние отделения концевой массы, и в части (с) показано состояние выпускания фала.
[0032] Как показано на фиг. 4а, захватывающее обломки устройство 3 в состоянии соединения с концевой массой 2 приводится в сближение с обломками Х вместе с концевой массой 2. Когда захватывающее обломки устройство 3 приближается к обломкам Х, в то время как оси гарпуна 31 и поршня 32b удерживаются в состоянии, по существу перпендикулярном поверхности обломков Х, то переключатели 34 входят в контакт с поверхностью обломков Х, как показано на фиг. 4с, и передается сигнал выстреливания.
[0033] В противоположность этому, когда захватывающее обломки устройство 3 приближается с наклоном к поверхности обломков Х, как показано на фиг. 4b, то кольцевая часть 33а направляющего элемента 33 входит в контакт с поверхностью обломков Х. Затем, когда захватывающее обломки устройство 3 медленно сближается с обломками Х, то направляющий элемент 33 корректирует ориентацию захватывающего обломки устройства 3 на основе точки контакта кольцевой части 33а. Наконец, ориентация захватывающего обломки устройства 3 корректируется до состояния, по существу перпендикулярно поверхности обломков Х, как показано на фиг. 4с.
[0034] Когда переключатели 34 входят в контакт с поверхностью обломков Х, как показано на фиг. 4с, то сигнал выстреливания передается в стреляющее устройство 32 (пиротехнические клапаны 32с), газ из пиротехнических клапанов 32с выпускается в цилиндр 32а, и поршень 32b выталкивается из цилиндра 32а. За счет этих операций гарпун 31 выстреливается из стреляющего устройства 32, и гарпун 31 проникает в обломки Х, как показано на фиг. 5а. В данном случае глубина проникновения гарпуна 31 устанавливается с помощью стопорного механизма 32d, и гарпун 31 не отделяется от стреляющего устройства 32 или не выходит из стреляющего устройства 32.
[0035] В данном случае относительное движение между поверхностью обломков Х и гарпуном 31 приводит к толканию и прижиманию сильфона 39 к поверхности обломков Х. В соответствии с этим, с помощью сильфона 39 может быть образовано вокруг точки проникновения гарпуна 31 закрытое пространство, которое обеспечивает возможность подавления разброса осколков и т.п., образующихся во время проникновения гарпуна 31. Дополнительно к этому, когда внутри обломков Х образуется газ, то газ выпускается в космос через путь 31b потока. Следует отметить, что сила реакции, возникающая при выстреливании гарпуна 31, поглощается с помощью буфера 38.
[0036] За счет проникновения гарпуна 31 в обломки Х, обломки Х могут быть захвачены с помощью захватывающего обломки устройства 3. Затем обломки Х должны быть заторможены. Для этого перерезается проволока 37b запирающего устройства 37, как показано на фиг. 5b. При разрезании проволоки 37b устраняется сдерживание крюка 37а. Поэтому сила напряжения цилиндрической пружины 36, размещенной в корпусе 35, толкает концевую массу 2 в направлении от захватывающего обломки устройства 3 в космос. Затем, как показано на фиг. 5с, концевая масса 2 отделяется от захватывающего обломки устройства 3, и фал 4 выпускается наружу и развертывается.
[0037] Ниже приводится описание работы устройства 1 для удаления обломков со ссылками на фиг. 6а-7b. На фиг. 6 показаны операции устройства для удаления обломков, при этом в части (А) показано состояние движения, в части (b) показано состояние сближения, и в части (с) показано состояние захвата. На фиг. 7 показаны операции устройства для удаления обломков, при этом в части (а) показано состояние отделения, и в части (b) показано состояние выпуска фала.
[0038] Как показано на фиг. 6а, захватывающее обломки устройство 3 в установленном на корабле-носителе 5 состоянии приближается к обломкам Х, подлежащим удалению. Обломки Х вращаются на орбите с не регулярным опрокидыванием. Например, корабль-носитель 5 выводится в положение ниже орбиты обломков Х. Затем, при сближении с обломками Х с использованием движительной системы 51, корабль-носитель 5 постепенно перемещается на орбиту за счет центробежной силы.
[0039] Когда корабль-носитель 5 выводится на орбиту обломков Х, то корабль-носитель 5 приводит в действие руку 53 робота для отделения концевой массы 2 и захватывающего обломки устройства 3 от корабля-носителя 5, и позиционирует захватывающее обломки устройство 3 как раз перед кораблем-носителем 5, как показано на фиг. 6b.
[0040] Корабль-носитель 5 принимает ориентацию захвата и перемещается при одновременном мониторинге своего собственного положения и положения обломков Х с использованием GPS или т.п. В данном случае можно осуществлять наблюдение за обломками Х с помощью устройства наблюдения, такого как камера CCD или лазерный радар, с целью оценки модели движения обломков Х и вычисления места для выстреливания гарпуна 31. Затем, как показано на фиг. 6с, корабль-носитель 5 приближается к обломкам Х, и передний конец захватывающего обломки устройства 3 приводится в контакт с местом, в котором должен выстреливаться гарпун 31. Следует отметить, что для приведения переднего конца захватывающего обломки устройства 3 в контакт с поверхностью обломков Х, можно использовать указанную выше руку 53 робота, или же передний конец захватывающего обломки устройства 3 можно приводить в контакт с поверхностью обломков Х посредством выстреливания захватывающего обломки устройства 3 из концевой массы 2 с близкого расстояния до обломков Х.
[0041] Когда передний конец захватывающего обломки устройства 3 входит в контакт с поверхностью обломков Х, то выстреливается гарпун 31, как показано на фиг. 5а, и захватываются обломки Х. После захвата обломков Х, корабль-носитель 5 приводит в действие руку 53 робота для отделения устройства 1 для удаления обломков (концевой массы 2) и отдаляется, как показано на фиг. 7а. Затем корабль-носитель 5 перемещается к другому куску подлежащих удалению обломков.
[0042] Устройство 1 для удаления обломков, отделенное от корабля-носителя 5, отделяет концевую массу 2 от захватывающего обломки устройства 3, как показано на фиг. 5b и 5с, и инициирует выпуск в космос и развертывание фала 4. В данном случае, когда концевая масса 2 имеет движительную систему 21, то направлением развертывания и ориентацией фала 4 можно управлять с использованием движительной системы 21.
[0043] Способ удаления обломков, описание которого приводится ниже, можно просто выполнять с использованием устройства 1 для удаления обломков, включающего: концевую массу 2, предназначенную для сближения с подлежащими удалению обломками Х; захватывающее обломки устройство 3, установленное с возможностью отделения на концевой массе 2; и фал 4, соединяющий друг с другом захватывающее обломки устройство 3 и концевую массу 2. Способ удаления обломков включает: стадию сближения захватывающего обломки устройства 3 с обломками Х; стадию коррекции ориентации захватывающего обломки устройства 3; стадию захвата обломков Х с помощью захватывающего обломки устройства 3; и стадию выпуска в космос и развертывания фала 4. На стадии коррекции ориентации захватывающее обломки устройство 3 наклонно приближается к поверхности обломков Х и часть (направляющий элемент 33) захватывающего обломки устройства 3 входит в контакт с поверхностью обломков Х. Затем осуществляется коррекция ориентации захватывающего обломки устройства 3 на основе точки контакта. На стадии развертывания фала концевая масса 2 отделяется от захватывающего обломки устройства 3 для выпуска фала 4 в космос.
[0044] В соответствии с этим, в устройстве 1 для удаления обломков и в способе удаления обломков, согласно этому варианту выполнения, гарпун 31 не выстреливается в удаленном месте, но угол выстреливания гарпуна 31 регулируется посредством приближения захватывающего обломки устройства 3 к обломкам Х и посредством приведения в контакт направляющего элемента 33 с поверхностью обломков Х. Поэтому гарпун 31 может выстреливаться в положении вблизи поверхности обломков Х под подходящим углом выстреливания, так что может быть уменьшена кинетическая энергия, необходимая для выстреливания в обломки Х, и может быть уменьшена сила реакции.
[0045] Дополнительно к этому, гарпун 31 выстреливается после регулирования угла выстреливания на близком расстоянии. Поэтому вероятность промаха гарпуном 31 обломков Х, отскакивания или прохождения полностью насквозь обломков Х может быть уменьшена, так что можно точно захватывать обломки Х. Дополнительно к этому, поскольку гарпун 31 может надежно проникать в обломки Х, можно также исключить необходимость в стадии наблюдения, проник или нет гарпун 31 в обломки Х, или в устройстве для такого наблюдения.
[0046] Ниже приводится описание устройств 1 для удаления обломков, согласно другим вариантам выполнения данного изобретения, со ссылками на фиг. 8-10. В данном случае, на фиг. 8 показано устройство для удаления обломков, согласно второму варианту выполнения данного изобретения, при этом в части (а) показан вид сбоку, а в части (b) -вид сверху. На фиг. 9 показаны устройства для удаления обломков, согласно некоторым другим вариантам выполнения данного изобретения, при этом в части (а) показан третий вариант выполнения, а в части (b) показан четвертый вариант выполнения. На фиг. 10 показано на виде сбоку устройство для удаления обломков, согласно пятому варианту выполнения данного изобретения. Следует отметить, что компоненты, которые одинаковы с компонентами указанного выше устройства 1 для удаления обломков, согласно первому варианту выполнения данного изобретения, обозначены теми же позициями, и их повторное описание не приводится.
[0047] Во втором варианте выполнения, показанном на фиг. 8а и 8b, концевая масса 2 включает опорное устройство 24 для опоры стреляющего устройства 32. Опорное устройство 24 включает, например, пару рам 24а, соединенных каждая с возможностью поворота с концевой массой 2 через шарнир 24с, и удерживающее устройство 24b, которое удерживает передние концевые части обеих рам 24а на стреляющем устройстве 32.
[0040] Пара рам 24а предусмотрена в положениях противоположно друг другу, при этом стреляющее устройство 32 расположено между ними, и удерживают стреляющее устройство 32 между ними. Каждая из рам 24а имеет, например, форму буквы А, как показано на фиг. 8b, и части двух ног соединены каждая с концевой массой 2. Удерживающее устройство 24b включает, например, проволоку, которая удерживает передние концевые части пары рам 24а в состоянии контакта со стреляющим устройством 32 (в частности, с цилиндром 32а), и резак, который разрезает проволоку. Следует отметить, что форма рам 24а и конфигурация удерживающего устройства 24b указаны лишь в качестве примеров, и не ограничиваются формой и конфигурацией, показанными на чертежах. Дополнительно к этому, не обязательно должна быть предусмотрена пара рам 24а, а может быть предусмотрена рама 24а лишь на одной стороне.
[0049] Поскольку стреляющее устройство 32 опирается на корпус 35 через буфер 38, то может сохраняться положение относительно корпуса 35 (в частности, состояние, в котором оси гарпуна 31, цилиндра 32b и корпуса 35 выровнены по существу на одной прямой линии) в космосе без силы тяжести. С другой стороны, например, когда устройство 1 для удаления обломков находится на земле, то сила тяжести воздействует на стреляющее устройство 32, и когда устройство 1 для удаления обломков запускается в космос, то на стреляющее устройство 32 действует ускорение. Поэтому передняя концевая часть захватывающего обломки устройства 3 имеет в этом случае тенденцию к отклонению (стреляющее устройство 32 имеет тенденцию принимать наклонное состояние относительно корпуса 35). Относительно устройства 1 для удаления обломков, согласно второму варианту выполнения, предусмотрение опорного устройства 24 обеспечивает возможность опоры стреляющего устройства 32 с помощью концевой массы 2, так что можно предотвращать наклон захватывающего обломки устройства 3 даже на земле и при запуске.
[0050] Например, на стадии состояния сближения, показанном на фиг. 6b, опорное устройство 24 разрезает проволоку удерживающего устройства 24b для отвода рам 24а в отведенные положения, показанные штриховыми линиями на фиг. 8а. Следует отметить, что хотя это не показано, возможно предусмотрение пружин или т.п. для шарниров 24с или для удерживающих частей для поворота рам 24а в отведенные положения. Дополнительно к этому, выступ 25, образованный на поверхности концевой массы 2, является примером компонента для фиксации концевой массы 2 на корабле-носителе 5, как показано на фиг. 1. Например, выступ 25 входит в фиксирующую часть 54, которая является отверстием, образованным в поверхности корабля-носителя 5, и удерживается с помощью удерживающего устройства.
[0051] В третьем варианте выполнения, показанном на фиг. 9а, предусмотрен буфер 6, который уменьшает удар, создаваемый при вхождении захватывающего обломки устройства 3 в контакт с поверхностью обломков 6. Буфер 6 предусмотрен, например, на промежуточной части трубчатого тела, образующего выходное отверстие 2а для фала концевой массы 2, и включает, например, соединительный механизм. Соединительный механизм соединяет переднюю секцию и заднюю секцию, образованные, например, за счет разделения трубчатого тела выходного отверстия 2а для фала на две передние и задние части. В данном случае показан буфер 6, который включает два звена, однако количество звеньев не ограничивается показанным на чертеже количеством. Дополнительно к этому, в буфере 6 может использоваться эластичное тело, такое как пружинное или резиновое, или компонент в виде сильфона вместо соединительного механизма.
[0052] В устройстве 1 для удаления обломков, согласно третьему варианту выполнения, например, рамы 24а могут отводиться назад на стадии состояния сближения, показанной на фиг. 6b, и удар, который создается при вхождении захватывающего обломки устройства 3 в контакт с обломками Х, как показано на фиг. 6с, может поглощаться буфером 6.
[0053] В показанном на фиг. 9b четвертом варианте выполнения концевая масса 2 включает движительную систему 21' для движения захватывающего обломки устройства 3. Четвертый вариант выполнения обеспечивает возможность выполнения операции удаления обломков Х с помощью лишь устройства 1 для удаления обломков, без установки устройства 1 для удаления обломков на корабль-носитель 5. В соответствии с этим, хотя количество удаляемых обломков Х равно единице, или расстояние до следующих подлежащих удалению обломков Х является большим, можно эффективно выполнять операцию.
[0054] В четвертом варианте выполнения захватывающее обломки устройство 3 сближается с обломками Х за счет использования движительной системы 21'. Поэтому концевая масса 2 предпочтительно включает опоры 26 солнечных элементов, образующих источник электроснабжения. Следует отметить, что хотя и не изображено, возможно также предусмотрение буфера 6, показанного на фиг. 9а, между концевой массой 2 и захватывающим обломки устройством 3.
[0055] В показанном на фиг. 10 пятом варианте выполнения рука 53 робота, показанная на фиг. 1, выполнена более длинной и предназначена для позиционирования устройства 1 для удаления обломков в положении не вдоль центральной оси La корабля-носителя 5. Устройство 1 для удаления обломков располагается, например, так, что центральная ось Lb устройства 1 для удаления обломков может быть параллельной центральной оси La корабля-носителя 5, в положении вне центральной оси La корабля-носителя 5, как показано на чертеже. Пятый вариант выполнения обеспечивает возможность позиционирования устройства 1 для удаления обломков в положении, подходящем для выстреливания гарпуна 31, даже когда корабль-носитель 5 не может приблизиться достаточно близко к обломкам Х для занятия положения, в котором гарпун 31 может выстреливаться вдоль центральной оси La корабля-носителя 5. Следует отметить, что рука 53 робота не ограничивается показанной на чертеже конфигурацией, и может включать, например, телескопический механизм, так что может обслуживаться состояние, показанное на фиг. 2, а также состояние, показанное на фиг. 10.
[0056] Дополнительно к этому, в пятом варианте выполнения рука 53 робота может использоваться также в качестве буфера 36 посредством сгибания руки 52 робота. Дополнительно к этому, в устройстве 1 для удаления обломков, согласно показанному на фиг. 9а третьему варианту выполнения или показанному на фиг. 9b четвертому варианту выполнения, плечо буфера 6 может быть выполнено более длинным, аналогично руке 53 робота, показанной на фиг. 10. Это обеспечивает возможность позиционирования захватывающего обломки устройства 3 в положении вне центральной оси концевой массы 2.
[0057] Выше было приведено описание нескольких вариантов выполнения данного изобретения; однако каждый вариант выполнения является лишь примером, приведенным для облегчения понимания данного изобретения, и данное изобретение не ограничивается указанными выше вариантами выполнения. Технический объем данного изобретения не ограничивается специальными техническими решениями, раскрытыми в указанных выше вариантах выполнения, а включают различные модификации, изменения, альтернативные технологии и т.п., которые могут быть легко выведены из них. Например, возможно применение комбинации одного, двух или более вариантов выполнения 2-5 с первым вариантом выполнения, и такая комбинация находится, естественно, внутри объема данного изобретения.
[0058] Данная заявка претендует на приоритет на основании заявки № 2014-199569 на патент Японии, поданной 30 сентября 2014, полное содержание которой включается в данное описание.
Промышленная применимость
[0059] Изобретение можно применять, например, в устройстве для удаления обломков с целью удаления обломков, дрейфующих в космосе, и в способе удаления обломков.
Перечень позиций
[0060]
1 Устройство для удаления обломков
2 Концевая масса
2а Выходное отверстие для фала
3 Захватывающее обломки устройство
4 Фал
5 Корабль-носитель
6 Буфер
21,21' Движительная система
22 Панель солнечных элементов
23 Захватная часть
24 Опорное устройство
24а Рама
24b удерживающее устройство
24с Шарнир
25 Выступ
26 Опора солнечных элементов
31 Гарпун
31а Зубец
31b Путь прохождения потока
32 Стреляющее устройство
32а Цилиндр
32b Поршень
32с Пиротехнический клапан
32d Стопорный механизм
32е Стенная часть
32f Часть с большим диаметром
33 Направляющий элемент
33а Кольцевая часть
33b Лучевая часть
34 Переключатель
35 Корпус
36 Цилиндрическая пружина
37 Запирающее устройство
37а Крюк
37b Проволока
37а Резак для проволоки
38 Буфер
39 Сильфон
39а Передняя концевая часть
39b Задняя концевая часть
51 Движительная система
52 Опора солнечных элементов
53 Рука робота
54 Фиксирующая часть.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМИЧЕСКИЙ МУСОРОСБОРЩИК | 2021 |
|
RU2772496C1 |
| СПОСОБ УДАЛЕНИЯ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ НЕФУНКЦИОНИРУЮЩЕГО КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2559392C1 |
| УСТРОЙСТВО УБОРКИ КОСМИЧЕСКОГО МУСОРА И СПОСОБ УБОРКИ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2574366C2 |
| Способ удаления космического мусора из околоземного пространства | 2018 |
|
RU2679498C1 |
| Пусковая установка с гравитационно-пружинным выстреливанием подводных снарядов с возможностью размещения на плавсредствах и/или летательных аппаратах | 2024 |
|
RU2834491C1 |
| ТРАНСПОРТИРОВЩИК ВОДОЛАЗОВ | 2011 |
|
RU2458816C1 |
| Устройство уборки космического мусора | 2021 |
|
RU2769579C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ УБОРКИ КОСМИЧЕСКОГО МУСОРА | 2019 |
|
RU2703056C1 |
| СНАРЯД ДЛЯ МЕТАНИЯ И СПОСОБЫ ЕГО ИСПОЛЬЗОВАНИЯ | 2002 |
|
RU2293281C2 |
| СПОСОБ РАЗМЕЩЕНИЯ КАБЕЛЯ ПОД ПЛИТОЙ | 1999 |
|
RU2213405C2 |
Изобретение относится к космической технике. Устройство (1) захвата и удаления дрейфующих в космосе обломков включает концевую массу (2), выполненную с возможностью приближения к обломкам, подлежащим удалению, захватывающее обломки устройство (3), установленное с возможностью отделения на концевой массе (2); и фал (4), соединяющий друг с другом захватывающее обломки устройство (3) и концевую массу (2). Захватывающее обломки устройство (3) включает гарпун (31), способный проникать в обломки, стреляющее устройство (32) для выстреливания гарпуна (31), направляющий элемент (33), расположенный с возможностью вхождения в контакт с поверхностью обломков для регулирования угла выстреливания гарпуна (31) относительно поверхности обломков, и переключатель (34), с возможностью передачи сигнала выстреливания в стреляющее устройство (32). Техническим результатом изобретения является повышение точности захвата обломков. 2 н. и 9 з.п. ф-лы, 10 ил.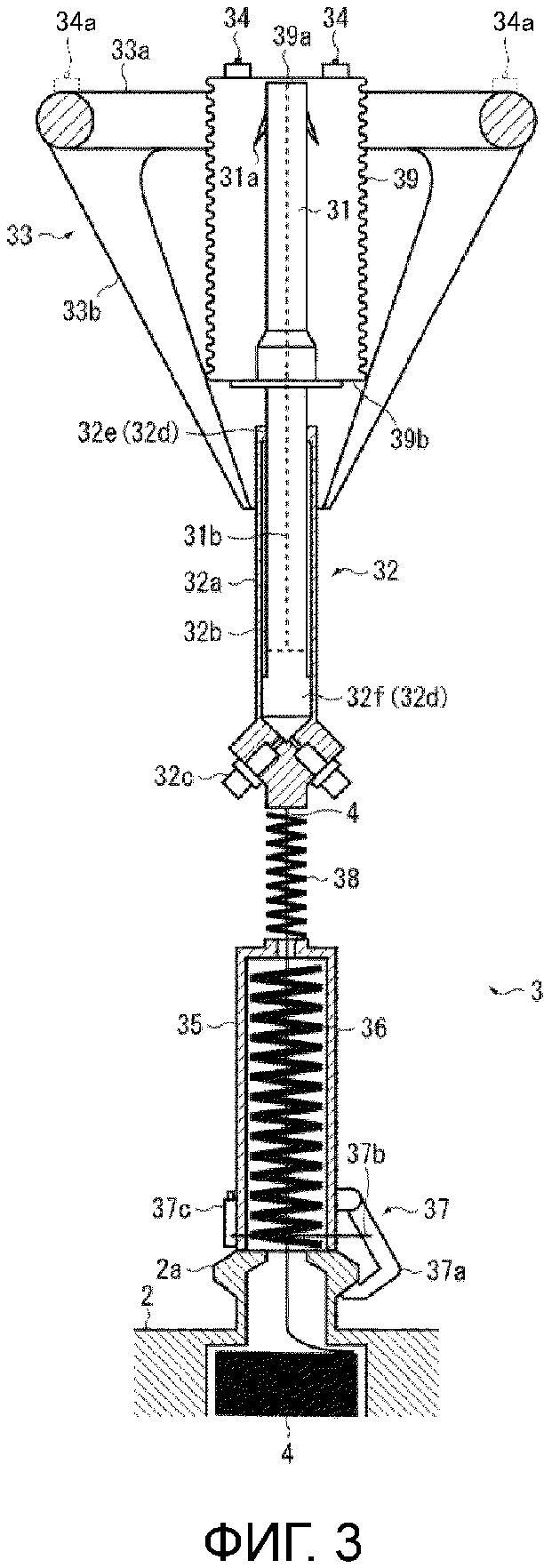
1. Устройство для удаления обломков для захвата дрейфующих в космосе обломков и удаления обломков с орбиты, при этом устройство для удаления обломков включает:
концевую массу, выполненную с возможностью приближения к обломкам, подлежащим удалению;
захватывающее обломки устройство, установленное с возможностью отделения на концевой массе; и
фал, соединяющий друг с другом захватывающее обломки устройство и концевую массу, при этом захватывающее обломки устройство включает
гарпун, способный проникать в обломки,
стреляющее устройство для выстреливания гарпуна,
направляющий элемент, расположенный с возможностью вхождения в контакт с поверхностью обломков, для регулирования угла выстреливания гарпуна относительно поверхности обломков, и
переключатель, выполненный с возможностью передачи сигнала выстреливания в стреляющее устройство,
упомянутая концевая масса выполнена с возможностью отделения от захватывающего обломки устройства,
упомянутый фал выполнен с возможностью выпуска в космос.
2. Устройство для удаления обломков по п. 1, в котором захватывающее обломки устройство включает буфер, который уменьшает удар, создаваемый при выстреливании или вхождении в контакт гарпуна с поверхностью обломков.
3. Устройство для удаления обломков по п. 1, в котором направляющий элемент включает кольцевую часть, расположенную на переднем конце, и лучевую часть, поддерживающую кольцевую часть.
4. Устройство для удаления обломков по п. 1, в котором захватывающее обломки устройство включает предотвращающий разброс кожух, закрывающий наружную периферию гарпуна и имеющую открывающуюся часть, расположенную впереди переднего конца гарпуна.
5. Устройство для удаления обломков по п. 3, в котором переключатель расположен на переднем конце кольцевой части.
6. Устройство для удаления обломков по п. 4, в котором переключатель расположен на переднем конце предотвращающего разброс кожуха.
7. Устройство для удаления обломков по п. 1, в котором гарпун включает проходной канал для выпуска газа из обломков в космос.
8. Устройство для удаления обломков по п. 1, в котором концевая масса включает опорное устройство, поддерживающее стреляющее устройство.
9. Устройство для удаления обломков по п. 1, в котором концевая масса включает движительную систему или установлена на корабле-носителе, включающем движительную систему.
10. Устройство для удаления обломков по п. 1, в котором стреляющее устройство включает стопорный механизм, который задает глубину проникновения гарпуна от поверхности обломков.
11. Способ удаления обломков для захвата обломков, дрейфующих в космосе, и удаления с орбиты, при этом способ содержит:
использование устройства для удаления обломков, включающего концевую массу, выполненную с возможностью сближения с подлежащими удалению обломками; захватывающее обломки устройство, установленное с возможностью отделения на концевой массе; и фал, соединяющий друг с другом захватывающее обломки устройство и концевую массу,
стадию сближения захватывающего обломки устройства с обломками;
стадию коррекции ориентации захватывающего обломки устройства, приближающегося наклонно к поверхности обломков, на основании точки контакта, в которой часть захватывающего обломки устройства входит в контакт с поверхностью обломков;
стадию захвата обломков с помощью захватывающего обломки устройства; и
стадию развертывания фала с отделением концевой массы от захватывающего обломки устройства для выпуска фала в космос.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| МНОГОРАЗОВЫЙ КОСМИЧЕСКИЙ АППАРАТ-БУКСИР ДЛЯ УБОРКИ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2510359C1 |
| УСТРОЙСТВО ЭЛЕКТРИЧЕСКОГО ТОРМОЗА | 2017 |
|
RU2671804C1 |

