ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Данная заявка испрашивает преимущество по предварительной заявке на патент США 62/828,925, поданной 3 апреля 2019 г., которая включена в настоящий документ путем ссылки.
ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
[0002] Настоящее изобретение по существу относится к медицинской визуализации и, в частности, к созданию и представлению трехмерного изображения полости тела, которое позволяет отслеживать местоположения катетера для обработки во время выполнения процедуры абляции.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0003] Некоторые медицинские процедуры, такие как абляция ткани в органе тела (например, сердце), выполняют путем введения в орган медицинского зонда. Медицинский зонд содержит абляционный электрод, выполненный с возможностью доставки радиочастотной (РЧ) энергии для абляции ткани, соприкасающейся с электродом, для обеспечения терапевтического эффекта. В альтернативных конфигурациях медицинский зонд может доставлять другой источник энергии, такой как лазер, ультразвук или криогенный хладагент, для обеспечения терапевтического эффекта.
[0004] В заявке на патент США № 2012/0209260, Lambert et al., описан способ прогнозирования электрического пересоединения стенки предсердия на основе усилия контакта, измеренного во время РЧ-абляции. Указанный способ включает представление линии траектории, показывающей порядок образования поврежденных участков во время выполнения абляции.
[0005] В заявке на патент США № 2013/0281839, Yan et al., описан способ визуализации катетера во время выполнения трехмерной ультразвуковой процедуры. Способ включает использование проиллюстрированного ограничения по геометрическому параметру, позволяющего улучшить отслеживание катетера с шестью степенями свободы (DOF) [x, y, z, a, b, c], где xyz соответствуют перемещению, при этом a, b, c соответствуют повороту, с четырьмя степенями свободы [r, a, b, c], где r представляет собой перемещение вдоль линии траектории, связанной с кончиком катетера.
[0006] В заявке на патент США № 2010/0256558, Olson et al., описана роботизированная система для управления катетером. Указанная система содержит пользовательский интерфейс, который позволяет пользователю выбирать целевые точки, которые можно использовать для идентификации поврежденных участков для предполагаемого или завершенного проведения терапии, точки маршрута для полуавтоматизированного ступенчатого перемещения катетера, точки назначения для полностью автоматизированного перемещения или точки в качестве условных маркеров или виртуальных электрофизиологических датчиков, которые могут не оказывать влияния на относительное перемещение.
[0007] В заявке на патент США № 2008/0255505, Carlson et al., описан пользовательский интерфейс для управления роботизированной катетерной системой. Пользовательский интерфейс отображает для оператора катетер внутри или относительно трехмерного пространства, такого как полость тела или орган, например, камера сердца пациента. Оператор может использовать мышь для указания щелчком точек в полости тела, и пользовательский интерфейс проецирует в трехмерное пространство линию траектории, которую можно использовать для направления роботизированного катетера.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0008] В соответствии с одним вариантом осуществления настоящего изобретения предложен способ контроля за медицинской процедурой, включающий, одновременно с подачей энергии, подачу энергии к зонду, находящемуся в контакте с тканью в полости внутри тела живого субъекта, для выполнения абляции ткани, прием процессором сигналов от преобразователя местоположения, расположенного в зонде, которые указывают местоположение зонда в полости, обработку сигналов для получения точек трехмерных координат местоположения, соответствующих местоположению зонда в последовательные моменты времени, в которые подавали энергию, а также, одновременно с подачей энергии, отображение на дисплее трехмерного изображения полости тела и наложение на трехмерное изображение визуальных индикаторов, соответствующих точкам трехмерных координат местоположения в последовательные моменты времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с последовательностью.
[0009] В одном варианте осуществления полость включает камеру сердца.
[0010] В некоторых вариантах осуществления способ также включает отображение ограничивающей сферы, имеющей поверхность, которая включает визуальные индикаторы.
[0011] В первом варианте осуществления ограничивающая сфера включает минимальную ограничивающую сферу.
[0012] Во втором варианте осуществления способ дополнительно включает вычисление средневзвешенного значения для точек трехмерных координат местоположения, а отображение ограничивающей сферы включает размещение ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем средневзвешенному значению для точек трехмерных координат местоположения.
[0013] В третьем варианте осуществления способ также включает подсчет в последовательные моменты времени соответствующего количества экземпляров каждой из точек трехмерных координат местоположения, а отображение ограничивающей сферы включает размещение ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем трехмерной точке местоположения, имеющей наибольшее количество экземпляров.
[0014] В другом варианте осуществления визуальные индикаторы и визуальная траектория образуют непрерывную линию, которая проходит через графические обозначения местоположения на трехмерном изображении 70, соответствующие последовательности точек координат.
[0015] В дополнительном варианте осуществления визуальная траектория включает линейные сегменты, соединяющие каждую последовательную пару визуальных индикаторов.
[0016] В другом варианте осуществления способ также включает подсчет в последовательные моменты времени соответствующего количества экземпляров каждой из точек трехмерных координат местоположения, а наложение каждого определенного визуального индикатора включает отображение определенного визуального индикатора с применением цвета на основе соответствующего количества экземпляров определенного визуального индикатора.
[0017] В еще одном варианте осуществления способ дополнительно включает указание порогового значения, причем в случае обнаружения того, что количество точек трехмерных координат местоположения превышает пороговое значение, наложение визуальных индикаторов включает отображение на дисплее визуальных индикаторов, соответствующих пороговому значению самых последних точек трехмерных координат.
[0018] В другом варианте осуществления способ также включает указание порогового периода времени, причем в случае, когда последовательность моментов времени превышает пороговый период времени, наложение визуальных индикаторов включает отображение на дисплее визуальных индикаторов, соответствующих точкам трехмерных координат в течение самого последнего порогового периода времени.
[0019] В соответствии с одним вариантом осуществления настоящего изобретения также предложено медицинское устройство для контроля медицинской процедуры, содержащее зонд, абляционный модуль, выполненный с возможностью подачи энергии к зонду, который находится в контакте с тканью в полости внутри тела живого субъекта, для выполнения абляции ткани, дисплей, а также процессор, выполненный с возможностью приема, одновременно с подачей энергии абляционным модулем, сигналов от преобразователя местоположения, расположенного в зонде, которые указывают местоположение зонда в полости, обработки указанных сигналов для получения точек трехмерных координат местоположения, соответствующих местоположению зонда в последовательные моменты времени, в которые подавали энергию, а также, одновременно с подачей энергии абляционным модулем, обеспечения отображения на дисплее трехмерного изображения полости тела и наложения на трехмерное изображение визуальных индикаторов, соответствующих точкам трехмерных координат местоположения в последовательные моменты времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с последовательностью.
[0020] В соответствии с одним вариантом осуществления настоящего изобретения дополнительно предложен компьютерный программный продукт, используемый в сочетании с абляционным модулем, выполненным с возможностью подачи энергии к зонду, который находится в контакте с тканью в полости внутри тела живого субъекта, для выполнения абляции ткани, причем указанный продукт включает энергонезависимый машиночитаемый носитель, на котором хранятся команды программы, которые при их считывании компьютером инициируют на компьютере прием, одновременно с подачей энергии абляционным модулем, сигналов от преобразователя местоположения, расположенного в зонде, которые указывают местоположение зонда в полости, обработку указанных сигналов для получения точек трехмерных координат местоположения, соответствующих местоположению зонда в последовательные моменты времени, в которые подавали энергию, а также, одновременно с подачей энергии абляционным модулем, обеспечение отображения на дисплее трехмерного изображения полости тела и наложения на трехмерное изображение визуальных индикаторов, соответствующих точкам трехмерных координат местоположения в последовательные моменты времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с последовательностью.
[0021] В соответствии с одним вариантом осуществления настоящего изобретения также предложен способ контроля медицинской процедуры, включающий прием процессором сигналов от преобразователя местоположения, расположенного в зонде, который находится в контакте с тканью в полости внутри тела живого субъекта, причем эти сигналы указывают местоположение зонда в полости, обработку сигналов для получения точек трехмерных координат местоположения, соответствующих местоположению зонда в последовательные моменты времени, и, пока зонд находится в контакте с тканью, отображение на дисплее трехмерного изображения полости тела с наложением на трехмерное изображение визуальных индикаторов, соответствующих точкам трехмерных координат местоположения в последовательные моменты времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с последовательностью, а также отображение на дисплее ограничивающей сферы, имеющей поверхность, которая включает множество визуальных индикаторов.
[0022] В некоторых вариантах осуществления ограничивающая сфера включает минимальную ограничивающую сферу.
[0023] В одном варианте осуществления способ также включает вычисление средневзвешенного значения для точек трехмерных координат местоположения, а отображение ограничивающей сферы включает размещение ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем средневзвешенному значению для точек трехмерных координат местоположения.
[0024] В другом варианте осуществления способ также включает подсчет в последовательные моменты времени соответствующего количества экземпляров каждой из точек трехмерных координат местоположения, а отображение ограничивающей сферы включает размещение ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем трехмерной точке местоположения, имеющей наибольшее количество экземпляров.
[0025] В соответствии с одним вариантом осуществления настоящего изобретения также предложено медицинское устройство для контроля медицинской процедуры, содержащее зонд, дисплей и процессор, выполненный с возможностью приема сигналов от преобразователя местоположения, расположенного в зонде, который находится в контакте с тканью в полости внутри тела живого субъекта, причем эти сигналы указывают местоположение зонда в полости, обработки сигналов для получения точек трехмерных координат местоположения, соответствующих местоположению зонда в последовательные моменты времени, и, пока зонд находится в контакте с тканью, отображения на дисплее трехмерного изображения полости тела с наложением на трехмерное изображение визуальных индикаторов, соответствующих точкам трехмерных координат местоположения в последовательные моменты времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с последовательностью, а также отображения на дисплее ограничивающей сферы, имеющей поверхность, которая включает множество визуальных индикаторов.
[0026] В соответствии с одним вариантом осуществления настоящего изобретения дополнительно предложен компьютерный программный продукт, используемый в сочетании с зондом, который находится в контакте с тканью в полости внутри тела живого субъекта, причем указанный продукт включает энергонезависимый машиночитаемый носитель, на котором хранятся команды программы, которые при их считывании компьютером инициируют на компьютере прием сигналов от преобразователя местоположения, расположенного в зонде, которые указывают местоположение зонда в полости, обработку указанных сигналов для получения точек трехмерных координат местоположения, соответствующих местоположению зонда в последовательные моменты времени, и, пока зонд находится в контакте с тканью, отображение на дисплее трехмерного изображения полости тела с наложением на трехмерное изображение визуальных индикаторов, соответствующих точкам трехмерных координат местоположения в последовательные моменты времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с последовательностью, а также отображение на дисплее ограничивающей сферы, имеющей поверхность, которая включает множество визуальных индикаторов.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0028] Настоящее изобретение описано в данном документе только в качестве примера со ссылкой на прилагаемые графические материалы, причем:
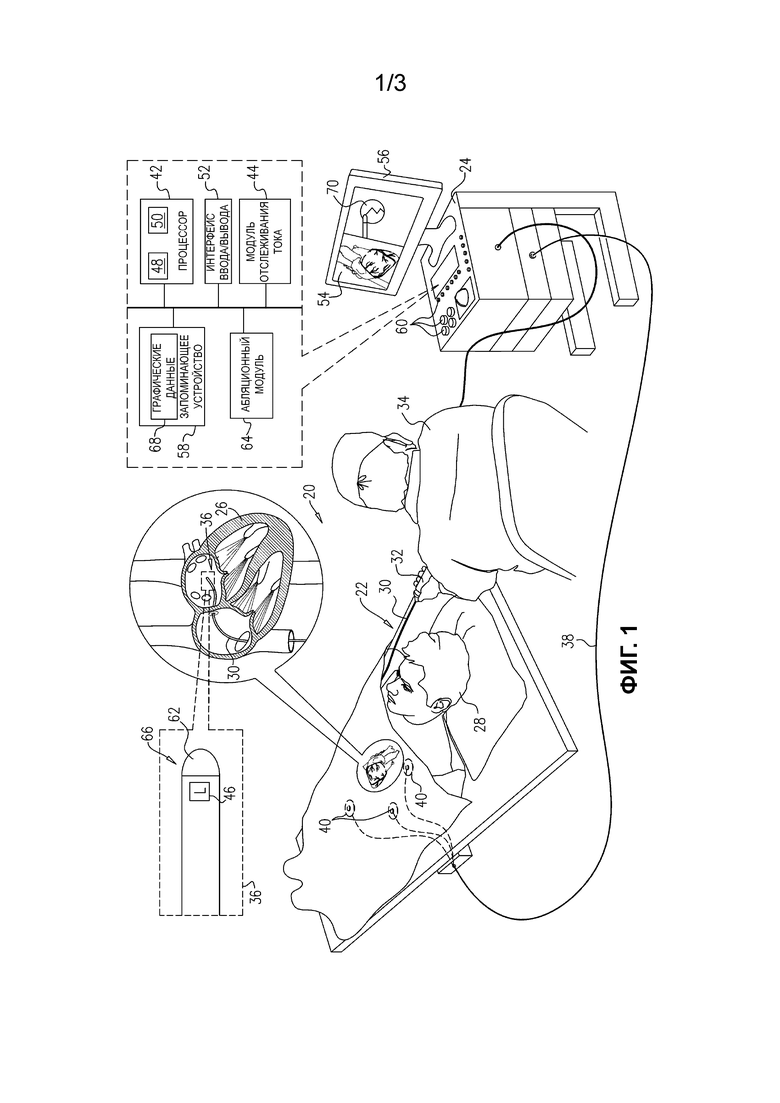
[0029] на Фиг. 1 представлено схематическое наглядное изображение медицинской системы, содержащей пульт управления и медицинский зонд с электродом для обработки, прикрепленным к его дистальному концу, в соответствии с примером осуществления настоящего изобретения;
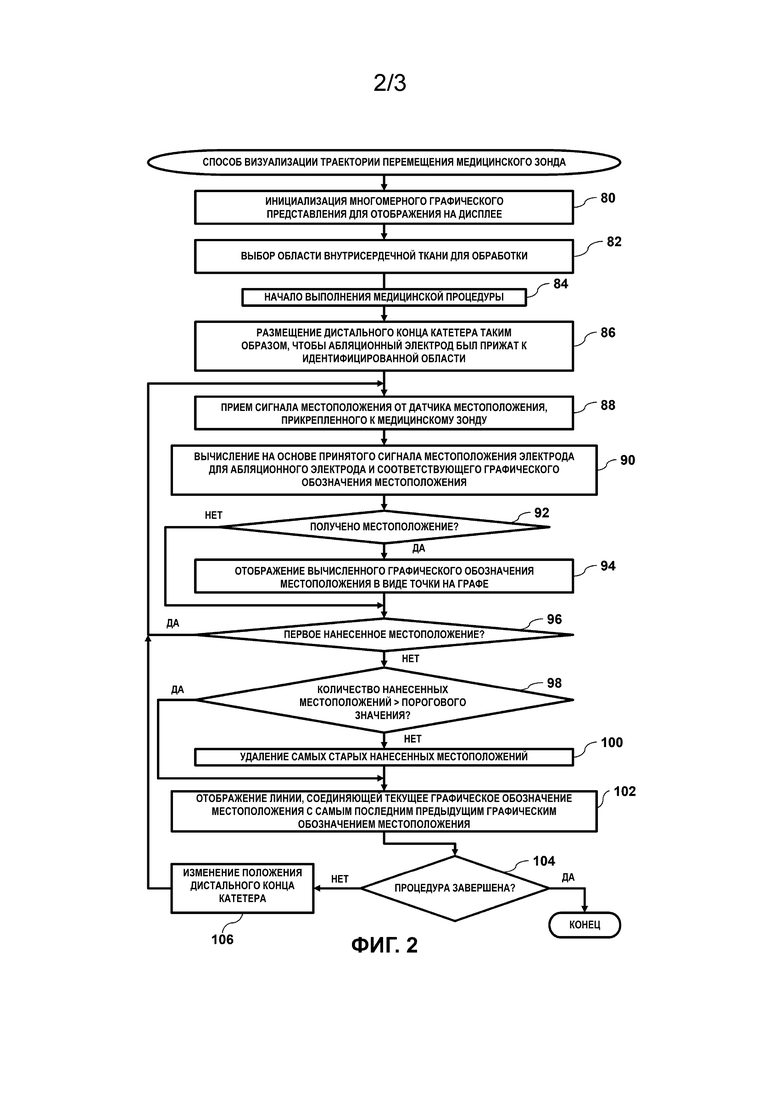
[0030] на Фиг. 2 представлена блок-схема, на которой схематически представлен способ отображения трехмерного изображения, позволяющий отслеживать перемещение электрода для обработки в ходе выполнения медицинской процедуры, в соответствии с примером осуществления настоящего изобретения;
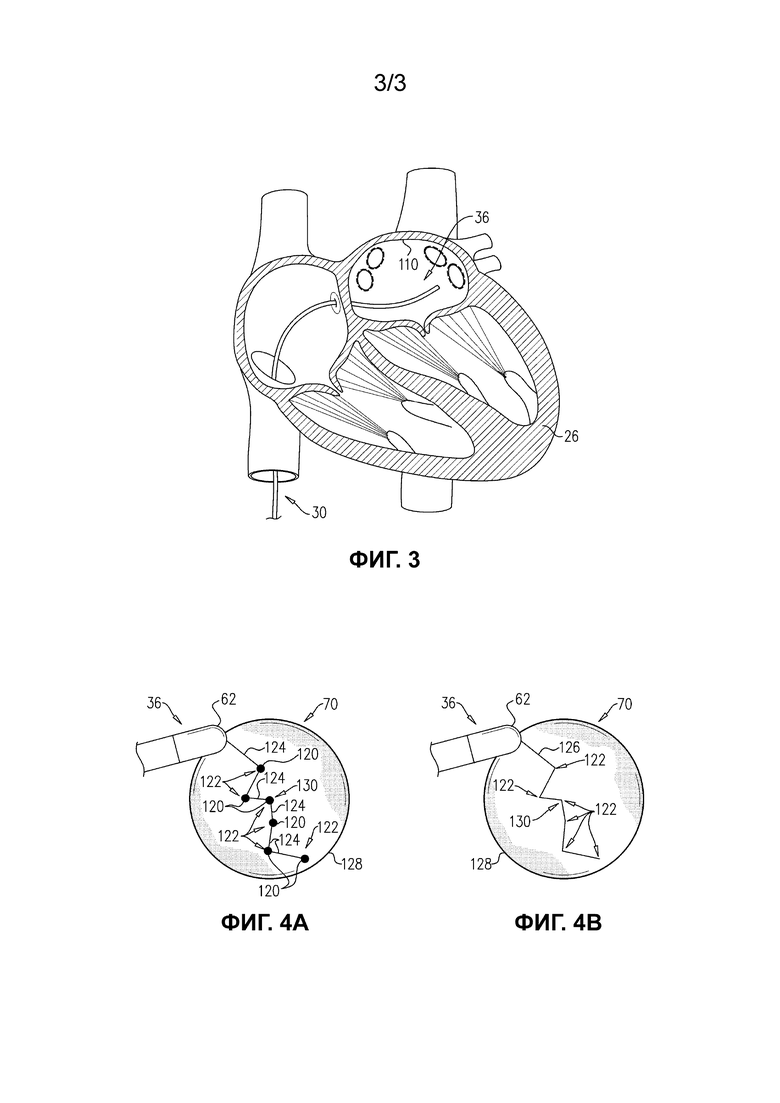
[0031] на Фиг. 3 представлено схематическое наглядное изображение дистального конца медицинского зонда внутри камеры сердца в соответствии с примером осуществления настоящего изобретения; и
[0032] на Фиг. 4A и 4B представлены схематические наглядные иллюстрации трехмерного изображения в соответствии с примерами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0033] При использовании медицинского зонда, содержащего электрод для обработки ткани в полости тела, может быть трудно поддерживать стабильность электрода для обработки. Например, при использовании абляционного катетера для абляции конкретной области внутрисердечной ткани во время процедуры абляции сердца перемещение сердца может усложнить поддержание стабильности абляционного катетера в моменты перемещения сердца (например, перемещения из-за сокращений сердца). Это, в частности, характерно для высокомощных абляций с короткими промежутками времени. Дополнительно или альтернативно следует отметить, что недостаточное приложение усилия дистальным концом абляционного катетера к внутрисердечной ткани может привести к соскальзыванию дистального конца во время выполнения процедуры.
[0034] В примерах осуществления настоящего изобретения предложена система и способы для контроля медицинской процедуры (например, абляции сердца) путем отслеживания перемещения медицинского зонда (например, абляционного катетера) во время выполнения процедуры. Как описано ниже в настоящем документе, к зонду, вступающему в контакт с тканью в полости внутри тела живого субъекта, подают энергию для абляции ткани, и одновременно с подачей энергии процессор принимает сигналы от преобразователя местоположения, расположенного в зонде, которые указывают местоположение зонда в полости. Сигналы обрабатывают таким образом, чтобы получить точки трехмерных координат местоположения, соответствующие местоположению зонда в последовательные моменты времени, в которые подавали энергии. Наконец, одновременно с подачей энергии на дисплее отображается трехмерное изображение полости тела, и на трехмерное изображение накладываются визуальные индикаторы, соответствующие точкам трехмерных координат местоположения в последовательные моменты времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с последовательностью.
[0035] С помощью линейной траектории во время выполнения процедуры системы, реализующие примеры осуществления настоящего изобретения, могут обеспечить для медицинских специалистов важную обратную связь в реальном времени в отношении эффективности выполняемой медицинской процедуры, поскольку длина указанной линейной траектории прямо пропорциональна величине перемещения зонда во время выполнения операции.
ОПИСАНИЕ СИСТЕМЫ
[0036] На Фиг. 1 представлено схематическое наглядное изображение медицинской системы 20, содержащей медицинский зонд 22 и пульт 24 управления, в соответствии с примером осуществления настоящего изобретения. Медицинская система 20 может быть основана, например, на системе CARTO®, производимой компанией Biosense Webster Inc., расположенной по адресу: 33 Technology Drive, Irvine, CA 92618 США. В примерах осуществления, описанных далее в настоящем документе, медицинский зонд 22 содержит внутрисердечный катетер, который можно использовать для диагностической или терапевтической обработки, например для абляции ткани в сердце 26 пациента 28. Альтернативно медицинский зонд 22 можно использовать, после внесения соответствующих изменений, при выполнении других терапевтических и/или диагностических процедур на сердце или других органах тела.
[0037] Зонд 22 содержит вводимую трубку 30 и рукоятку 32, соединенную с проксимальным концом вводимой трубки. С помощью рукоятки 32 медицинский специалист 34 может вставить зонд 22 в полость тела пациента 28. Например, медицинский специалист 34 может вставить зонд 22 через сосудистую систему пациента 28 таким образом, чтобы дистальный конец 36 зонда 22 входил в камеру сердца 26 и взаимодействовал с внутрисердечной тканью в требуемом местоположении или местоположениях.
[0038] Пульт 24 управления соединен посредством кабеля 38 с электродами на поверхности тела, которые, как правило, содержат адгезивные кожные пластыри 40, прикрепленные к пациенту 28. В конфигурации, показанной на Фиг. 1, в системе 20 для определения местоположения дистального конца 36 используют определение положения на основе импеданса.
[0039] Для реализации определения положения на основе импеданса пульт 24 управления содержит процессор 42, который в сочетании с модулем 44 отслеживания тока определяет координаты местоположения дистального конца 36 внутри сердца 26 на основе значений импеданса и/или токов, измеренных между адгезивными кожными пластырями 40 и электродом 46 для определения местоположения, представляющим собой электрод, который прикреплен к дистальному концу 36.
[0040] Как указано выше, в сочетании с текущим модулем 44 отслеживания тока процессор 42 может определять координаты местоположения дистального конца 36 внутри сердца 26 на основе значений импеданса и/или тока, измеренных между адгезивными кожными пластырями 40 и электродом 46 для определения местоположения. Такое определение, как правило, выполняют после выполнения процесса калибровки, относящегося к значениям импеданса или тока в известных местоположениях дистального конца.
[0041] Процессор 42 может содержать схему 48 подавления шума в режиме реального времени, как правило, выполненную в виде программируемой пользователем интегральной схемы (FPGA), за которой следует интегральная схема 50 аналого-цифрового преобразования (АЦП) сигнала. Процессор может быть запрограммирован для выполнения одного или более алгоритмов, описанных в настоящем документе, каждый из которых включает стадии, описанные ниже в настоящем документе. Процессор использует схему 48 и схему 50, а также элементы модулей, показанные на Фиг. 1, которые описаны в настоящем документе, для выполнения одного или более алгоритмов.
[0042] В медицинской системе, показанной на Фиг. 1, используется преобразователь положения на основе импеданса, содержащий адгезивные кожные пластыри 40 и электрод 46 для измерения местоположения дистального конца 36, но можно использовать и другие способы отслеживания положения (например, способы с использованием датчиков на основе магнита). Способы отслеживания положения на основе импенданса описаны, например, в патентах США 5,983,126, 6,456,864 и 5,944,022, содержание которых включено в данный документ путем ссылки. Способы отслеживания положения с применением магнитных полей, в которых используют преобразователь местоположения, содержащий датчик магнитного поля, описаны, например, в патентах США 5,391,199, 5,443,489, 6,788,967, 6,690,963, 5,558,091, 6,172,499 и 6,177,792, содержание которых включено в настоящий документ путем ссылки. Способы определения положения, описанные выше в данном документе, реализованы в вышеупомянутой системе CARTO® и подробно описаны в упомянутых выше патентах.
[0043] Пульт 24 управления также содержит интерфейс 52 связи ввода/вывода, посредством которого пульт управления получает сигналы от электрода 46 для определения местоположения и адгезивных кожных пластырей 40 и/или передает на них сигналы. На основе сигналов, принятых от электрода 46 для определения местоположения и адгезивных кожных пластырей 40, процессор 42 может генерировать карту 54, изображающую местоположение дистального конца 36 в теле пациента. Во время выполнения процедуры процессор 42 может отобразить карту 54 на дисплее 56 для медицинского работника 34 и сохранить данные, представляющие карту, в запоминающем устройстве 58. Запоминающее устройство 58 может включать любое приемлемое энергозависимое и/или энергонезависимое запоминающее устройство, такое как оперативное запоминающее устройство, твердотельный накопитель или накопитель на жестких магнитных дисках.
[0044] В некоторых примерах осуществления медицинский специалист 34 может управлять картой 54 с помощью одного или более устройств 60 ввода. В альтернативных примерах осуществления дисплей 56 может содержать сенсорный экран, который в дополнение к отображению карты 54 может быть выполнен с возможностью приема входных данных от медицинского специалиста 34.
[0045] В конфигурации, показанной на Фиг. 1, зонд 22 содержит электрод 62 для обработки, который может содержать абляционный электрод, а пульт 24 управления содержит абляционный модуль 64. В некоторых примерах осуществления электрод 62 для обработки прикреплен к дистальному кончику 66 зонда 22 и может иметь покрытый золотом дистальный кончик. Абляционный модуль 64 также может быть выполнен с возможностью контроля параметров абляции, такими как уровень и продолжительность подачи мощности для выполнения абляции (например, радиочастотной энергии) на электрод 62 для обработки, и управления ими. В некоторых примерах осуществления электрод 62 для обработки может быть выполнен с возможностью подачи сигнала в ткань сердца 26 и/или для измерения определенного физиологического свойства (например, локального электрического потенциала поверхности) в некотором местоположении в сердце.
[0046] Хотя в конфигурации, показанной на Фиг. 1, представлен зонд 22, содержащий электрод 46 для определения местоположения и электрод 62 для обработки, подразумевается, что конфигурации, в которых один электрод (например, электрод 62) применяют как для определения местоположения, так и для абляции, находятся в пределах сущности и объема настоящего изобретения.
[0047] Пока медицинский специалист применяет 34 зонд 22 для выполнения медицинской процедуры в полости тела (например, сердце 26) пациента 28, процессор 42 может хранить данные о местоположениях электрода 62 для обработки в виде графических данных 68 в запоминающем устройстве 58. В примерах осуществления настоящего изобретения с использованием графических данных 68 процессор 42 генерирует трехмерное изображение 70 и выводит трехмерное изображение на дисплей 56 в ходе выполнения медицинской процедуры, как описано далее в данном документе со ссылкой на Фиг. 2 и 4.
[0048] Как описано выше со ссылкой на Фиг. 1, для определения местоположения и ориентации дистального конца 36 используют определение положения на основе импеданса. В некоторых примерах осуществления местоположение и ориентация могут включать координаты положения в трехмерной системе 72 координат, содержащей ось 74 X, ось 76 Y и ось 78 Z.
ОТСЛЕЖИВАНИЕ МЕСТОПОЛОЖЕНИЯ И ВИЗУАЛИЗАЦИЯ ТРАЕКТОРИИ
[0049] На Фиг. 2 представлена блок-схема алгоритма, схематически иллюстрирующего способ создания и отображения трехмерного изображения 70, позволяющий отслеживать перемещение электрода 62 для обработки в ходе выполнения медицинской процедуры, а на Фиг. 3 представлено схематическое наглядное изображение дистального конца 36 внутри камеры сердца 26 в ходе выполнения медицинской процедуры в соответствии с примером осуществления настоящего изобретения.
[0050] На Фиг. 4A и 4B, которые вместе обозначены как Фиг. 4, представлены схематические наглядные иллюстрации трехмерного изображения 70 в соответствии с примерами осуществления настоящего изобретения. В некоторых примерах осуществления, как показано на Фиг. 4A, трехмерное изображение 70 содержит множество визуальных индикаторов 120, которые сопоставлены соответствующим местоположениям 112 зонда электрода 62 для обработки в ходе выполнения медицинской процедуры.
[0051] На стадии 80 описания процессор 42 выбирает пороговое значение отображения. Как описано ниже в настоящем документе, процессор 42 обеспечивает отображение на дисплее 56 трехмерного изображения 70, на котором представлены местоположения электрода 62 для обработки в ходе выполнения медицинской процедуры. Для выбора порогового значения отображения процессор 42 может извлечь пороговое значение отображения из запоминающего устройства 58 или принять сигнал от одного или более устройств 60 ввода, указывающий пороговое значение отображения.
[0052] В одном примере осуществления пороговое значение отображения может включать установленное количество местоположений (например, 8, 10 или 12). В этом примере осуществления процессор 42 может выводить трехмерное изображение 70, содержащее конкретное количество самых последних местоположений электрода 62 для обработки в ходе выполнения медицинской процедуры. В другом примере осуществления пороговое значение отображения может включать установленный период времени (например, 4, 6 или 8 секунд). В этом примере осуществления процессор 42 может выводить трехмерное изображение 70, в котором представлены местоположения электрода 62 для обработки в ходе выполнения медицинской процедуры в течение самого последнего установленного периода времени.
[0053] На первой стадии 82 отображения процессор 42 выводит на дисплей 56 трехмерное изображение 70, а на стадии 84 идентификации медицинский специалист 34 идентифицирует на карте область внутрисердечной ткани 34 (Фиг. 3) для обработки. В некоторых примерах осуществления трехмерное изображение 70 представляет собой трехмерное изображение данной полости тела (например, сердца 26) пациента 28 и может быть основано на ранее полученном трехмерном изображении данной полости тела.
[0054] На стадии 86 позиционирования медицинский специалист 34 управляет рукояткой 32 для размещения дистального конца таким образом, чтобы электрод 62 для обработки взаимодействовал (т. е. вступал в контакт) с идентифицированной областью внутрисердечной ткани 110, а на стадии 88 обработки медицинский специалист 34 начинает выполнение медицинской процедуры. Как описано выше, примеры медицинских процедур, которые могут быть выполнены с использованием примеров осуществления настоящего изобретения, включают, без ограничений, доставку энергии для выполнения абляции к внутрисердечной ткани 110 или измерение определенного физиологического свойства (например, локального электрического потенциала поверхности) внутрисердечной ткани. Для доставки энергии для выполнения абляции во внутрисердечную ткань 110 абляционный модуль 64 подает энергию к электроду 62 для обработки, который находится в контакте с внутрисердечной тканью.
[0055] Хотя в стадиях на блок-схеме описана обработка внутрисердечной ткани 110 в сердце 26, считается, что обработка любой ткани в любой полости тела пациента 28 находится в пределах сущности и объема настоящего изобретения.
[0056] На стадии 90 приема процессор 42 принимает от адгезивных кожных пластырей 40 сигналы местоположения, указывающие местоположение 112 данного зонда электрода 46 в сердце 26, а на стадии 92 процессор обрабатывает принятые сигналы таким образом, чтобы получить точки трехмерных координат местоположения (т. е. в трехмерной системе 72 координат), соответствующие указанному местоположению, для электрода 62 для обработки.
[0057] На первой стадии 94 сравнения в случае, если пороговое значение отображения не было достигнуто, на стадии 96 наложения процессор 42 накладывает на трехмерное изображение 70 визуальный индикатор 120, соответствующий местоположению зонда электрода для обработки в данной полости тела. Как описано выше, пороговое значение отображения может включать установленное количество местоположений или установленный период времени.
[0058] Если на второй стадии 98 принятия решения будет определено, что трехмерные координаты местоположения, полученные на стадии 92, были первыми трехмерными координатами местоположения, полученными в ходе выполнения медицинской процедуры (т. е. выполнение которой было начато на стадии 90), способ продолжается со стадии 90. Однако в случае, если полученные трехмерные координаты местоположения не являются первыми полученными координатами местоположения, на второй стадии 100 отображения процессор 42 выводит на дисплей 56 линейную траекторию, соединяющую наложенный визуальный индикатор 120 с самым последним из предыдущих визуальных индикаторов, наложенных процессором 42 на трехмерное изображение 70.
[0059] В примере, представленном на Фиг. 4A, линейная траектория содержит последовательность линейных сегментов 124, соединяющих последовательные пары визуальных индикаторов 120 в соответствующих местоположениях 122 трехмерного изображения на трехмерном изображении 70, которые соответствуют местоположениям 112 зонда электрода 62 для обработки в ходе выполнения процедуры. Например, в случае, если трехмерное изображение 70 содержит последовательность из первого, второго, третьего и четвертого визуальных индикаторов 120, последовательные пары визуальных индикаторов включают первый и второй визуальные индикаторы, второй и третий визуальные индикаторы, а также третий и четвертый визуальные индикаторы.
[0060] В примере, представленном на Фиг. 4B, линейная траектория представляет собой одну непрерывную линию 140, которая проходит через графические обозначения 122 местоположения на трехмерном изображении 70, которые соответствуют местоположениям 112 зонда электрода 62 для обработки в ходе выполнения процедуры.
[0061] На третьей стадии 102 отображения процессор 42 выводит на дисплей 56 ограничивающую сферу 126, содержащую поверхность 128, которая включает отображаемые в данный момент визуальные индикаторы 120. В одном примере осуществления ограничивающая сфера 126 может представлять собой минимальную ограничивающую сферу, которая может быть определена как ограничивающая сфера с минимальным радиусом из всех возможных ограничивающих сфер 126.
[0062] В одном примере осуществления процессор 42 может вычислять центр 130 сферы 126 как определенное графическое обозначение 122 местоположения на трехмерном изображении 70, которое соответствует чаще всего наблюдаемому местоположению 112 зонда электрода 62 для обработки в ходе выполнения процедуры. В некоторых примерах осуществления процессор может идентифицировать чаще всего наблюдаемое местоположение 112 зонда электрода 62 для обработки в ходе выполнения процедуры путем подсчета в ходе выполнения медицинской процедуры соответствующего количества экземпляров каждой из точек трехмерных координат местоположения и определения данного местоположения 112 зонда, которому соответствует самое большое количество экземпляров.
[0063] В другом примере осуществления процессор 42 может вычислять центр 130 сферы 126 в виде определенного графического обозначения 122 местоположения на трехмерном изображении 70, которое соответствует данному местоположению, путем вычисления средневзвешенного значения (например, на основе местоположения и времени) местоположений 112 зонда электрода 62 для обработки в ходе выполнения процедуры и устанавливать сферу по центру в графическом обозначении местоположения, соответствующем вычисленному средневзвешенному значению.
[0064] В дополнительных примерах осуществления процессор 42 в ходе выполнения медицинской процедуры может вычислять соответствующее количество экземпляров каждого из местоположений зонда и отображать каждый определенный визуальный индикатор 120 в цвете, соответствующем количеству раз, когда электрод для обработки находился в местоположении зонда, соответствующем определенному визуальному индикатору. Например:
Процессор 42 может отображать определенный индикатор 120 желтым цветом, если электрод для обработки находился в определенном местоположении на протяжении менее одной секунды.
Процессор 42 может отображать определенный индикатор 120 зеленым цветом, если электрод для обработки находился в определенном местоположении на протяжении одной-двух секунд.
Процессор 42 может отображать определенный индикатор 120 красным цветом, если электрод для обработки находился в определенном местоположении на протяжении более двух секунд.
[0065] На третьей стадии 104 сравнения реализация способа завершается, если медицинский специалист 34 завершил выполнение медицинской процедуры (т. е. с использованием электрода 62 для обработки). Если медицинская процедура не завершена, способ продолжается со стадии 90.
[0066] В случае стадии 94, если достигнуто пороговое значение отображения, то на стадии 106 удаления процессор 42 удаляет по меньшей мере последний визуальный индикатор с трехмерного изображения 70 на дисплее 56, а способ продолжается со стадии 96.
[0067] В первом примере в случае, если пороговое значение отображения содержит восемь местоположений, при получении процессором 42 девятой точки трехмерных координат местоположения в ходе выполнения процедуры процессор обнаруживает достижение порогового значения отображения и удаляет с трехмерного изображения 70 визуальный индикатор, соответствующий первой точке трехмерных координат местоположения, полученных в ходе выполнения процедуры, и добавляет на трехмерное изображение новый визуальный индикатор 120, соответствующий девятой точке трехмерных координат местоположения, полученных в ходе выполнения процедуры.
[0068] Во втором примере в случае, если пороговое значение отображения равно десяти секундам, при получении процессором 42 точек координат местоположения на одиннадцатой секунде процедуры процессор обнаруживает достижение порогового значения отображения и удаляет с трехмерного изображения 70 визуальный индикатор, соответствующий точкам координат местоположения, полученным на первой секунде выполнения процедуры, и добавляет на трехмерное изображение новый визуальный индикатор 120, соответствующий точкам координат местоположения, полученным на одиннадцатой секунде выполнения процедуры.
[0069] При повторении стадий 90-106 в ходе выполнения медицинской процедуры процессор 42 принимает сигналы местоположения в последовательные моменты времени в ходе выполнения процедуры, и линейные сегменты линии, выводимые процессором 42 на трехмерное изображение 70, представляют собой линейную траекторию, соответствующую местоположениям 112 зонда в соответствии с последовательностью. Как описано выше, линейная траектория может представлять собой линейные сегменты 124 или непрерывную линию 140.
[0070] Хотя в представленных выше стадиях описано получение данных о местоположении и отображение трехмерного изображения 70 в режиме реального времени в ходе выполнения медицинской процедуры, считается, что использование графических данных 68 для создания и представления трехмерного изображения 70 в более позднее время находится в пределах сущности и объема настоящего изобретения. Например, перед завершением медицинской процедуры медицинский специалист 34 может просмотреть процедуру с использованием пульта управления для представления трехмерного изображения 70 в виде последовательности из пятисекундных «окон» (т. е. периодов времени). Таким образом, в случае, если медицинская процедура включает 30-секундную абляцию, процессор 42 может обеспечивать отображение последовательности из шести трехмерных изображений 70, которые соответствуют местоположениям электрода 62 в течение каждого пятисекундного периода времени.
[0071] Следует понимать, что описанные выше варианты осуществления приведены лишь в качестве примера и что настоящее изобретение не ограничено вариантами, показанными и подробно описанными выше в настоящем документе. Напротив, объем настоящего изобретения включает в себя как комбинации, так и подкомбинации различных элементов, описанных выше в настоящем документе, а также их варианты и модификации, которые могут быть предложены специалистами в данной области после прочтения приведенного выше описания и которые не были описаны на предшествующем уровне техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ ВИЗУАЛИЗАЦИИ НА ДИСПЛЕЕ ИЗОБРАЖЕНИЯ ЧАСТИЧНО УПЛОЩЕННОЙ ПОВЕРХНОСТИ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ПОЛОСТИ, А ТАКЖЕ ПОСТОЯННЫЙ МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2020 |
|
RU2735068C1 |
| СИСТЕМА И СПОСОБ АДАПТИВНОЙ АБЛЯЦИИ И ТЕРАПИИ НА ОСНОВАНИИ ЭЛАСТОГРАФИЧЕСКОГО МОНИТОРИНГА | 2016 |
|
RU2707037C2 |
| ТРЕХМЕРНОЕ ПРЕДСТАВЛЕНИЕ ЭЛЕКТРИЧЕСКОЙ АКТИВНОСТИ | 2020 |
|
RU2758748C1 |
| КАЛИБРОВКА УЛЬТРАЗВУКОВОГО, ОСНОВАННОГО НА ЭЛАСТИЧНОСТИ, ОТОБРАЖЕНИЯ ГРАНИЦЫ ОЧАГА ПОРАЖЕНИЯ | 2016 |
|
RU2702090C2 |
| УСТРОЙСТВО ВИЗУАЛИЗАЦИИ | 2010 |
|
RU2540090C2 |
| ДИСПЛЕЙ КАТЕТЕРА, ПОКАЗЫВАЮЩИЙ УГОЛ НАКЛОНА И ДАВЛЕНИЕ | 2009 |
|
RU2574369C2 |
| НАПРАВЛЯЕМАЯ АБЛЯЦИЯ СЕРДЦА С ИСПОЛЬЗОВАНИЕМ МАШИННОГО ОБУЧЕНИЯ (ML) | 2020 |
|
RU2779871C2 |
| УЛЬТРАЗВУКОВОЕ ИЗМЕРЕНИЕ ОБЪЕМНОГО ПОТОКА ДЛЯ ПЛАНИРОВАНИЯ АБЛЯЦИИ | 2013 |
|
RU2651875C2 |
| СИСТЕМА И СПОСОБ КАРТОГРАФИРОВАНИЯ ДЛЯ МЕДИЦИНСКИХ ПРОЦЕДУР | 2011 |
|
RU2577760C2 |
| СПОСОБ ИЗОБРАЖЕНИЯ ВНУТРИСЕРДЕЧНОЙ ЭЛЕКТРОГРАММЫ | 2020 |
|
RU2764590C1 |
Группа изобретений относится к медицине, а именно к лучевой диагностике, и может быть использована для визуализации траектории перемещения катетера. Способы, устройство и энергонезависимый машиночитаемый носитель реализуют варианты осуществления настоящего изобретения, которые включают подачу энергии к зонду, который находится в контакте с тканью в полости тела, для абляции ткани. При подаче энергии от преобразователя местоположения, расположенного в зонде, поступают сигналы, которые указывают местоположение зонда в полости. Сигналы обрабатывают таким образом, чтобы получить точки трехмерных координат местоположения, соответствующие местоположению зонда в последовательные моменты времени, в которые подавали энергию. При подаче энергии на дисплее отображается трехмерное изображение полости тела, и визуальные индикаторы накладываются на трехмерное изображение, причем визуальные индикаторы соответствуют точкам трехмерных координат местоположения в последовательные моменты времени. Наконец, на трехмерное изображение накладывают линейную траекторию, соединяющую точки координат в соответствии с последовательностью. Дополнительно вычисляют средневзвешенные значения для точек трехмерных координат местоположения. Ограничивающая сфера имеет поверхность, которая включает визуальные индикаторы. Причем отображение ограничивающей сферы включает размещение ограничивающей сферы по центру в графическом представлении местоположения на трехмерном изображении, соответствующем средневзвешенному значению для точек трехмерных координат местоположения. Способ обеспечивает обратную связь в реальном времени в отношении эффективности выполняемой медицинской процедуры за счет визуализации траектории. 6 н. и 16 з.п. ф-лы, 5 ил.
1. Способ контроля процедуры абляции, содержащий:
подачу энергии к зонду, который находится в контакте с тканью в полости внутри тела живого субъекта, для выполнения абляции ткани;
во время процедуры абляции прием процессором сигналов от преобразователя местоположения, расположенного в зонде, которые указывают местоположение зонда в полости;
обработку сигналов для получения точек трехмерных координат местоположения, соответствующих местоположению зонда в соответствии с последовательностью моментов времени во время процедуры абляции; и
во время процедуры абляции отображение на дисплее трехмерного изображения полости тела и наложение на трехмерное изображение визуальных индикаторов, соответствующих точкам трехмерных координат местоположения в соответствии с последовательностью моментов времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с последовательностью моментов времени; и
дополнительно содержащий вычисление средневзвешенного значения для точек трехмерных координат местоположения и отображение ограничивающей сферы, имеющей поверхность, которая включает визуальные индикаторы, причем отображение ограничивающей сферы включает размещение ограничивающей сферы по центру в графическом представлении местоположения на трехмерном изображении, соответствующем средневзвешенному значению для точек трехмерных координат местоположения.
2. Способ по п. 1, в котором полость включает камеру сердца.
3. Способ по п. 1, дополнительно содержащий подсчет в соответствии с последовательностью моментов времени соответствующего количества случаев появления каждой из точек трехмерных координат местоположения, причем отображение ограничивающей сферы включает размещение ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем трехмерной точке местоположения, имеющей наибольшее количество случаев появления.
4. Способ по п. 1, в котором визуальные индикаторы и визуальная траектория образуют непрерывную линию, которая проходит через графические обозначения местоположения на трехмерном изображении, соответствующие последовательности точек координат.
5. Способ по п. 1, в котором визуальная траектория включает линейные сегменты, соединяющие каждую последовательную пару визуальных индикаторов.
6. Способ по п. 1, дополнительно содержащий подсчет в соответствии с последовательностью моментов времени соответствующего количества случаев появления каждой из точек трехмерных координат местоположения, причем наложение каждого определенного визуального индикатора включает отображение определенного визуального индикатора с применением цвета на основе соответствующего количества случаев появления определенного визуального индикатора.
7. Способ по п. 1, дополнительно содержащий указание порогового значения, представляющего собой заданное количество местоположений зонда во время процедуры абляции, причем в случае обнаружения того, что количество точек трехмерных координат местоположения превышает пороговое значение, наложение визуальных индикаторов включает отображение на дисплее визуальных индикаторов, соответствующих пороговому значению самых последних точек трехмерных координат.
8. Способ по п. 1, дополнительно содержащий указание порогового периода времени, представляющего собой заданный период времени во время процедуры абляции, причем в случае, когда последовательность моментов времени превышает пороговый период времени, наложение визуальных индикаторов включает отображение на дисплее визуальных индикаторов, соответствующих точкам трехмерных координат, полученным в течение самого последнего порогового периода времени.
9. Медицинское устройство для контроля процедуры абляции, содержащее:
зонд;
абляционный модуль, выполненный с возможностью подачи энергии к зонду, который находится в контакте с тканью в полости внутри тела живого субъекта, для выполнения абляции ткани;
дисплей и
процессор, выполненный с возможностью:
во время процедуры абляции приема сигналов от преобразователя местоположения, расположенного в зонде, которые указывают местоположение зонда в полости,
обработки сигналов для получения точек трехмерных координат местоположения, соответствующих местоположению зонда в соответствии с последовательностью моментов времени, во время процедуры абляции, и
во время процедуры абляции обеспечения отображения на дисплее трехмерного изображения полости тела и наложения на трехмерное изображение визуальных индикаторов, соответствующих точкам трехмерных координат местоположения в соответствии с последовательностью моментов времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с указанной последовательностью моментов времени;
процессор дополнительно выполнен с возможностью вычисления средневзвешенного значения для точек трехмерных координат местоположения и обеспечения отображения ограничивающей сферы, имеющей поверхность, которая включает визуальные индикаторы, путем размещения ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем средневзвешенному значению для точек трехмерных координат местоположения.
10. Медицинское устройство по п. 9, причем полость включает камеру сердца.
11. Медицинское устройство по п. 9, в котором процессор дополнительно выполнен с возможностью подсчета в соответствии с последовательностью моментов времени соответствующего количества случаев появления каждой из точек трехмерных координат местоположения, причем процессор выполнен с возможностью обеспечения отображения ограничивающей сферы путем размещения ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем трехмерной точке местоположения, имеющей наибольшее количество случаев появления.
12. Медицинское устройство по п. 9, причем визуальные индикаторы и визуальная траектория образуют непрерывную линию, которая проходит через графические обозначения местоположения на трехмерном изображении, соответствующие последовательности точек координат.
13. Медицинское устройство по п. 9, причем визуальная траектория включает линейные сегменты, соединяющие каждую последовательную пару визуальных индикаторов.
14. Медицинское устройство по п. 9, в котором процессор дополнительно выполнен с возможностью подсчета в соответствии с последовательностью моментов времени соответствующего количества случаев появления каждой из точек трехмерных координат местоположения, причем процессор выполнен с возможностью наложения каждого определенного визуального индикатора путем отображения определенного визуального индикатора с применением цвета на основе соответствующего количества случаев появления определенного визуального индикатора.
15. Медицинское устройство по п. 9, в котором процессор дополнительно выполнен с возможностью указания порогового значения, представляющего собой заданное количество местоположений зонда во время процедуры абляции, и причем в случае обнаружения того, что количество точек трехмерных координат местоположения превышает пороговое значение, процессор выполнен с возможностью наложения визуальных индикаторов путем отображения на дисплее визуальных индикаторов, соответствующих пороговому значению самых последних точек трехмерных координат.
16. Медицинское устройство по п. 9, в котором процессор дополнительно выполнен с возможностью указания порогового периода времени, представляющего собой заданный период времени во время процедуры абляции, и причем в случае, когда последовательность моментов времени превышает пороговый период времени, процессор выполнен с возможностью наложения визуальных индикаторов путем отображения на дисплее визуальных индикаторов, соответствующих точкам трехмерных координат, полученным в течение самого последнего порогового периода времени.
17. Энергонезависимый машиночитаемый носитель, используемый в сочетании с абляционным модулем, выполненным с возможностью подачи энергии к зонду, который находится в контакте с тканью в полости внутри тела живого субъекта, для выполнения абляции ткани, причем носитель содержит хранящиеся на нем команды программы, которые при их считывании компьютером побуждают выполнение на компьютере следующих действий:
во время процедуры абляции прием сигналов от преобразователя местоположения, расположенного в зонде, которые указывают местоположение зонда в полости;
обработку сигналов для получения точек трехмерных координат местоположения, соответствующих местоположению зонда в соответствии с последовательностью моментов времени, во время процедуры абляции; и
во время процедуры абляции отображение на дисплее трехмерного изображения полости тела и наложение на трехмерное изображение визуальных индикаторов, соответствующих точкам трехмерных координат местоположения в соответствии с последовательностью моментов времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с последовательностью моментов времени; и
дополнительно вычисление средневзвешенного значения для точек трехмерных координат местоположения и обеспечение отображения ограничивающей сферы, имеющей поверхность, которая включает визуальные индикаторы, путем размещения ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем средневзвешенному значению для точек трехмерных координат местоположения.
18. Способ контроля процедуры абляции, содержащий:
прием процессором сигналов от преобразователя местоположения, расположенного в зонде, который находится в контакте с тканью в полости внутри тела живого субъекта, причем сигналы указывают местоположение зонда в полости;
обработку сигналов для получения точек трехмерных координат местоположения, соответствующих местоположению зонда в соответствии с последовательностью моментов времени; и,
пока зонд находится в контакте с тканью:
отображение на дисплее трехмерного изображения полости тела;
наложение на трехмерное изображение визуальных индикаторов, соответствующих точкам трехмерных координат местоположения в соответствии с последовательностью моментов времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с указанной последовательностью моментов времени; и
отображение на дисплее ограничивающей сферы, имеющей поверхность, которая включает множество визуальных индикаторов;
и дополнительно содержащий вычисление средневзвешенного значения для точек трехмерных координат местоположения, и отображение ограничивающей сферы включает размещение ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем средневзвешенному значению для точек трехмерных координат местоположения.
19. Способ по п. 18, дополнительно содержащий подсчет в соответствии с последовательностью моментов времени соответствующего количества случаев появления каждой из точек трехмерных координат местоположения, причем отображение ограничивающей сферы включает размещение ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем трехмерной точке местоположения, имеющей наибольшее количество случаев появления.
20. Медицинское устройство для контроля процедуры абляции, содержащее:
зонд;
дисплей и
процессор, выполненный с возможностью:
приема сигналов от преобразователя местоположения, расположенного в зонде, который находится в контакте с тканью в полости внутри тела живого субъекта, причем сигналы указывают местоположение зонда в полости;
обработки сигналов для получения точек трехмерных координат местоположения, соответствующих местоположению зонда в соответствии с последовательностью моментов времени, и,
пока зонд находится в контакте с тканью:
отображения на дисплее трехмерного изображения полости тела,
наложения на трехмерное изображение визуальных индикаторов, соответствующих точкам трехмерных координат местоположения в соответствии с последовательностью моментов времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с указанной последовательностью моментов времени, и
отображения на дисплее ограничивающей сферы, имеющей поверхность, которая включает множество визуальных индикаторов;
процессор дополнительно выполнен с возможностью вычисления средневзвешенного значения для точек трехмерных координат местоположения, и при этом отображение ограничивающей сферы включает размещение ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем средневзвешенному значению для точек трехмерных координат местоположения.
21. Медицинское устройство по п. 20, в котором процессор дополнительно выполнен с возможностью подсчета в соответствии с последовательностью моментов времени соответствующего количества случаев появления каждой из точек трехмерных координат местоположения, причем процессор выполнен с возможностью обеспечения отображения ограничивающей сферы путем размещения ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем трехмерной точке местоположения, имеющей наибольшее количество случаев появления.
22. Энергонезависимый машиночитаемый носитель, используемый в сочетании с зондом, который находится в контакте с тканью в полости внутри тела живого субъекта, причем указанный носитель содержит хранящиеся на нем команды программы, которые при их считывании компьютером побуждают выполнение на компьютере следующих действий:
прием сигналов от преобразователя местоположения, расположенного в зонде, которые указывают местоположение зонда в полости;
обработку сигналов для получения точек трехмерных координат местоположения, соответствующих местоположению зонда в соответствии с последовательностью моментов времени, и,
пока зонд находится в контакте с тканью:
отображение на дисплее трехмерного изображения полости тела;
наложение на трехмерное изображение визуальных индикаторов, соответствующих точкам трехмерных координат местоположения в соответствии с последовательностью моментов времени, вместе с линейной траекторией, соединяющей точки координат в соответствии с указанной последовательностью моментов времени; и
отображение на дисплее ограничивающей сферы, имеющей поверхность, которая включает множество визуальных индикаторов; и
дополнительно вычисление средневзвешенного значения для точек трехмерных координат местоположения, и при этом отображение ограничивающей сферы включает размещение ограничивающей сферы по центру в графическом обозначении местоположения на трехмерном изображении, соответствующем средневзвешенному значению для точек трехмерных координат местоположения.
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С КОНТРОЛИРУЕМОЙ СРЕДОЙ ИЗМЕРЕНИЯ | 2008 |
|
RU2401983C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОТСЛЕЖИВАНИЯ ПОЛОЖЕНИЯ ТЕРАПЕВТИЧЕСКОГО УЛЬТРАЗВУКОВОГО ПРЕОБРАЗОВАТЕЛЯ | 2008 |
|
RU2492884C2 |
| US 20090182226 A1, 16.07.2009 | |||
| US 20140018797 A1, 16.01.2014 | |||
| US 20050054919 A1, 10.03.2005 | |||
| US 7778688 B2, 17.08.2010. | |||

