Область техники
Изобретение относится к системам контроля трубопроводов, в частности к системам внутритрубного контроля за состоянием магистральных и промысловых нефтепроводов, газопроводов и нефтепродуктопроводов. Изобретение может быть использовано для отслеживания прохождения внутри обследуемых трубопроводов внутритрубных дефектоскопов и диагностических снарядов и последующего определения местоположения выявленных дефектов и особенностей трубопроводов.
Уровень техники
Известны системы диагностического обследования трубопроводов, которые включают в себя внутритрубный снаряд и регистратор (патент США US 6023986, опубл. 25.02.2000, а также патент США US 6243657, опубл. 05.06.2001). В снаряде установлена измерительная система, содержащая датчики неразрушающего контроля в виде датчиков утечки магнитного потока (MFL), датчики инерциальной системы навигации в виде трехосных гироскопов и акселерометров, а также одометр (прибор для измерения пройденной снарядом дистанции), часы и средства обработки и записи измеренных данных. Для отслеживания траектории движения снаряда внутри трубопровода в снаряде устанавливают передатчик низкочастотных электромагнитных сигналов. Регистратор содержит приемник низкочастотных электромагнитных сигналов, приемник GPS, часы и средства обработки и записи принятых сигналов.
Известные системы работают следующим образом. Перед пропуском внутритрубного снаряда часы регистратора синхронизируют с часами в снаряде. Во время пропуска снаряда данные, измеренные датчиками неразрушающего контроля, датчиками инерциальной системы навигации, и показания одометра записывают в накопитель данных, установленный в снаряде, с привязкой ко времени по часам в снаряде. В контрольных точках вблизи трубопровода с помощью регистратора принимают сигналы от передатчика электромагнитных сигналов, принимают сигналы от приемника GPS и записывают в регистратор моменты времени по часам регистратора, когда снаряд прошел около регистратора, а также принятые от GPS-приемником GPS-координаты.
После завершения пропуска снаряда данные, записанные в накопитель данных снаряда, совмещают с данными, записанными в накопитель данных регистратора, по данным от датчиков неразрушающего контроля и показаниям одометра идентифицируют дефекты и особенности обследованного трубопровода и определяют их местоположение по дистанции. По данным датчиков системы инерциальной навигации определяют траекторию прокладки трубопровода. По совмещенным данным определяют местоположение особенностей и дефектов трубопровода относительно контрольных точек, в которых стояли регистраторы, а также GPS-координаты дефектов и особенностей трубопровода и GPS-координаты траектории прокладки трубопровода.
Недостаток известных систем заключается в неравномерности хода бортовых часов в снаряде и часов в регистраторе. Если трубопровод имеет большую протяженность и пропуск снаряда занимает длительное время, то разница в показаниях часов в снаряде и в регистраторе накапливается и может составить несколько секунд. Это приводит к ошибке в определении местоположения особенности или дефекта трубопровода в несколько метров.
Сущность изобретения
Задачей изобретения является создание способа и системы для отслеживания траектории движения внутритрубного снаряда, позволяющих повысить точность определения времени прохождения внутритрубного снаряда вблизи наземных контрольных точек, что позволит повысить точность определения положения особенностей трубопровода, при этом в зависимости от характера измерений, производимых измерительной системой, к особенностям трубопровода могут относиться элементы арматуры, сужения сечения, дефекты стенки, а также искривления линейной части трубопровода, характеризующие траекторию его прокладки.
Указанный результат достигается тем, что в предложенном способе отслеживания движения внутритрубного снаряда:
пропускают снаряд внутри трубопровода, измеряют с помощью измерительной системы в снаряде физические величины, характеризующие состояние и/или характеристики снаряда и/или трубопровода, и записывают их в накопитель данных снаряда с привязкой ко времени, определяемому по часам снаряда;
с внешней стороны трубопровода с помощью по меньшей мере одного регистратора, установленного вблизи контрольной точки трубопровода, измеряют напряженность магнитного поля или иные физические величины, позволяющие идентифицировать прохождение снаряда вблизи регистратора, с привязкой ко времени, определяемому по часам регистратора, на основании упомянутых измеренных физических величин и соответствующих им значений времени формируют характеристики, позволяющие идентифицировать моменты времени прохождения снаряда вблизи регистратора по часам регистратора, и записывают сформированные характеристики в накопитель данных регистратора;
во время пропуска снаряда внутри трубопровода с помощью передатчика, расположенного в одном из пары объектов, состоящей из снаряда и регистратора, передают сигнал с временной характеристикой, связанной с показаниями часов на стороне упомянутого передатчика;
принимают переданный сигнал с временной характеристикой с помощью приемника, расположенного в другом из упомянутой пары объектов, и записывают в накопитель данных на стороне упомянутого приемника по меньшей мере одну характеристику, связанную с временной характеристикой принятого сигнала, с привязкой к часам на стороне приемника;
определяют разность показаний часов на стороне передатчика и часов на стороне приемника, тем самым величину расхождения времени по часам регистратора и снаряда, и используют упомянутую величину расхождения времени в контрольной точке для определения характеристик трубопровода.
При этом в качестве упомянутого передатчика может быть использован передатчик электромагнитных колебаний, а в качестве упомянутого приемника - приемник электромагнитных колебаний, причем передаваемый сигнал кодируют путем изменения частоты электромагнитных колебаний в зависимости от значения передаваемой временной характеристики, при приеме переданного кодированного сигнала определяют частотные характеристики электромагнитных колебаний, соответствующие переданному кодированному сигналу, и записывают их в накопитель данных на стороне приемника вместе с временем по часам на стороне приемника. После выполнения пропуска снаряда совмещают данные, записанные в накопителе данных снаряда, с данными, записанными в накопителе данных регистратора, при этом по частотным характеристикам переданного кодированного сигнала упомянутого передатчика, записанного в накопителе данных регистратора, определяют разность показаний часов на стороне передатчика и показаний часов на стороне приемника; из накопителя данных на стороне передатчика считывают характеристики, привязанные к показаниям часов на стороне передатчика, а из накопителя данных на стороне приемника считывают характеристики, привязанные к показаниям часов на стороне приемника, и перезаписывают упомянутые характеристики с привязкой к показаниям одних и тех же часов для характеристик, записанных на стороне приемника, и для характеристик, записанных на стороне передатчика.
В качестве частотной характеристики электромагнитных колебаний предпочтительно определяют частоту электромагнитных колебаний в течение периода измерения упомянутой частоты. Частота электромагнитных колебаний может изменяться дискретно, или плавно, или периодически, при этом последовательность устанавливаемых значений частот электромагнитных колебаний может периодически повторяться, например, с периодом повторения значения в младших разрядах полного значения времени. Дополнительно, в дискретной последовательности устанавливаемых значений частот электромагнитных колебаний при каждом последующем изменении частоты электромагнитных колебаний знак изменения частоты может изменяться на противоположный.
Предпочтительно, в качестве передаваемой временной характеристики используется значение в одном или нескольких младших разрядах значения времени по часам на стороне передатчика, при этом в передаваемом сигнале с временной характеристикой, который передается в виде сигнала заданной частоты, частота однозначно соответствует значению в одном или нескольких младших разрядах.
Частотные характеристики принятых электромагнитных колебаний могут определяться путем измерения фазы принимаемых электромагнитных колебаний и определения по измеренной фазе частоты принятых электромагнитных колебаний. Частотные характеристики принятых электромагнитных колебаний анализируются, чтобы идентифицировать значение упомянутой временной характеристики, и в накопитель данных на стороне приемника записываются фазовые и/или частотные характеристики электромагнитных колебаний и/или временная характеристика.
Предпочтительно, с помощью измерительной системы, расположенной в снаряде, измеряют дистанцию, пройденную снарядом внутри трубопровода, и записывают в накопитель данных снаряда с привязкой к показаниям часов снаряда для последующего определения расстояния от соответствующей особенности трубопровода до контрольной точки.
Предпочтительно, с помощью приемника спутниковых сигналов, находящегося в регистраторе, принимают от искусственного спутника Земли сигнал спутникового времени и записывают значения спутникового времени в накопитель данных регистратора, после выполнения пропуска снаряда совмещают данные, записанные с привязкой к показаниям часов на стороне приемника и/или на стороне передатчика, с записанными значениями спутникового времени и перезаписывают упомянутые характеристики с привязкой к спутниковому времени.
С помощью приемника спутниковых сигналов также принимают сигналы спутниковой системы определения местоположения, определяют на их основе геодезические координаты регистратора и записывают их в накопитель данных регистратора, а после выполнения пропуска снаряда совмещают характеристики, позволяющие идентифицировать моменты времени прохождения снаряда вблизи регистратора по часам регистратора, с геодезическими координатами регистратора и определяют геодезические координаты снаряда в контрольных точках, в которых зарегистрировано прохождение снаряда вблизи регистратора.
В варианте осуществления, с помощью измерительной системы в снаряде измеряют дистанцию, пройденную снарядом внутри трубопровода, и характеристики стенки трубопровода, позволяющие идентифицировать дефекты стенки, и после пропуска снаряда идентифицирую дефекты стенки и определяют их геодезические координаты.
Разность показаний часов на стороне передатчика и часов на стороне приемника может определяться в процессе или после выполнения пропуска снаряда.
В варианте осуществления, с помощью модуля инерциальной системы навигации, входящего в состав измерительной системы в снаряде, измеряют ускорения и угловые скорости снаряда по нескольким ортогональным осям, а после выполнения пропуска снаряда по зависимостям пройденной внутри трубопровода дистанции, ускорений и угловых скоростей от времени, а также значениям геодезических координат контрольных точек, в которых снаряд прошел вблизи регистратора, определяют географическое положение траектории движения снаряда.
В другом варианте осуществления, при прохождении снаряда дополнительно формируют магнитное поле с помощью расположенного на снаряде источника магнитного поля, измеряют величину магнитного поля с помощью регистратора и идентифицируют прохождение снаряда вблизи регистратора по зависимости величины магнитного поля от времени.
В еще одном варианте осуществления с помощью регистратора принимают акустические колебания, связанные с прохождением снаряда внутри трубопровода, измеряют характеристики акустических колебаний, по которым идентифицируют прохождение снаряда вблизи регистратора.
В одном варианте, передатчик размещают в регистраторе, а приемник - в снаряде.
В другом варианте, передатчик размещают в снаряде, а приемник - в регистраторе.
Часы на стороне приемника могут синхронизироваться с часами на стороне передатчика перед выполнением пропуска снаряда или в процессе пропуска снаряда.
Вышеуказанный технический результат также достигается в соответствующей изобретению системе отслеживания траектории движения внутритрубного снаряда, содержащей:
внутритрубный снаряд, выполненный с возможностью перемещения внутри трубопровода;
измерительную систему снаряда для измерения физических величин, характеризующих состояние и/или характеристики снаряда и/или трубопровода;
накопитель данных снаряда для записи измеренных данных с привязкой ко времени, определяемому по часам снаряда;
по меньшей мере один регистратор, установленный вблизи контрольной точки с внешней стороны трубопровода, для измерения напряженности магнитного поля или иных физических величин, позволяющих идентифицировать прохождение снаряда вблизи регистратора, с привязкой ко времени, определяемому по часам регистратора, и формирования на основании упомянутых измеренных физических величин и соответствующих им значений времени характеристик, позволяющих идентифицировать моменты времени прохождения снаряда вблизи регистратора по часам регистратора, и содержащий накопитель данных регистратора для записи сформированных характеристик с привязкой ко времени, определяемому по часам регистратора;
передатчик, расположенный в одном из пары объектов, содержащей регистратор и снаряд, для передачи сигнала с временной характеристикой, связанной с показаниями часов на стороне упомянутого передатчика;
приемник, расположенный в другом из упомянутой пары объектов, содержащей регистратор и снаряд, для приема передаваемого сигнала с временной характеристикой, и содержащий накопитель данных для записи по меньшей мере одной характеристики, связанной с временной характеристикой принятого сигнала, с привязкой к часам на стороне упомянутого приемника;
устройство обработки для определения разности показаний часов на стороне передатчика и часов на стороне приемника, тем самым величины расхождения времени по часам регистратора и снаряда, и определения характеристик трубопровода с использованием величины расхождения времени в контрольной точке.
В варианте осуществления, передатчик представляет собой передатчик электромагнитных колебаний со средством кодирования передаваемого сигнала путем изменения частоты электромагнитных колебаний в зависимости от значения передаваемой временной характеристики; приемник представляет собой приемник электромагнитных колебаний со средством обработки переданного кодированного сигнала и определения частотных характеристик электромагнитных колебаний, соответствующих переданному кодированному сигналу; а устройство обработки выполнено в возможностью определения по частотным характеристикам переданного кодированного сигнала передатчика, записанного в накопителе данных на стороне приемника, разности показаний часов на стороне передатчика и показаний часов на стороне приемника, на основе сопоставления данных, записанных в накопителе данных снаряда, с данными, записанными в накопителе данных регистратора, и перезаписи упомянутых характеристик с привязкой к показаниям одних и тех же часов.
В варианте осуществления, приемник выполнен с возможностью измерения фазы принимаемых электромагнитных колебаний и определения по измеренной фазе частоты принятых электромагнитных колебаний, а устройство обработки выполнено с возможностью анализа частотных характеристик принятых электромагнитных колебаний и идентификации значения упомянутой временной характеристики для записи в накопитель данных на стороне приемника фазовых и/или частотных характеристик электромагнитных колебаний и/или временной характеристики.
Система предпочтительно содержит в регистраторе приемник спутниковых сигналов для приема от искусственного спутника Земли сигналов спутникового времени и записи значений спутникового времени в накопитель данных регистратора; при этом устройство обработки обеспечивает совмещение данных, записанных с привязкой к показаниям часов на стороне приемника и/или на стороне передатчика, с записанными значениями спутникового времени и перезаписи упомянутых характеристик с привязкой к спутниковому времени.
Приемник спутниковых сигналов предпочтительно принимает сигналы спутниковой системы определения местоположения для определения геодезических координат регистратора и записи их в накопитель данных регистратора, а устройство обработки выполнено с возможностью, после выполнения пропуска снаряда, совмещения характеристик, позволяющих идентифицировать моменты времени прохождения снаряда вблизи регистратора по часам регистратора, с геодезическими координатами регистратора и определения геодезических координат снаряда в контрольных точках, в которых зарегистрировано прохождение снаряда вблизи регистратора.
Измерительная система снаряда предпочтительно содержит средство измерения дистанции, пройденной снарядом внутри трубопровода, и измерения характеристик стенки трубопровода, позволяющих идентифицировать дефекты стенки; а устройство обработки выполнено с возможностью идентификации дефектов стенки и определения их геодезических координат.
Измерительная система в снаряде предпочтительно содержит модуль инерциальной системы навигации для измерения ускорений и угловых скоростей снаряда по нескольким ортогональным осям, при этом устройство обработки выполнено с возможностью определения географического положения траектории движения снаряда на основе зависимостей пройденной внутри трубопровода дистанции, ускорений и угловых скоростей от времени, а также значений геодезических координат контрольных точек, в которых снаряд прошел вблизи регистратора.
В варианте осуществления, система дополнительно содержит в снаряде источник магнитного поля, а в регистраторе - средство измерения величины магнитного поля для идентификации прохождения снаряда вблизи регистратора по зависимости величины магнитного поля от времени.
В другом варианте осуществления, система дополнительно содержит в регистраторе средство приема акустических колебаний, связанных с прохождением снаряда внутри трубопровода, и измерения характеристик акустических колебаний для идентификации прохождения снаряда вблизи регистратора.
Варианты осуществления изобретения
Изобретение поясняется далее на примерах выполнения, иллюстрируемых чертежами, на которых показано следующее:
Фиг.1 - схема размещения снаряда и регистратора согласно первому варианту осуществления;
Фиг.2 - график зависимости частоты электромагнитных колебаний от времени;
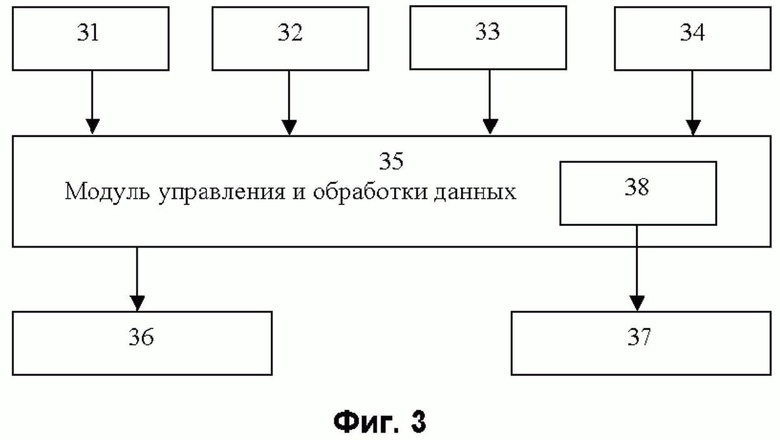
Фиг.3 - структурная схема оборудования внутритрубного снаряда в первом варианте осуществления;
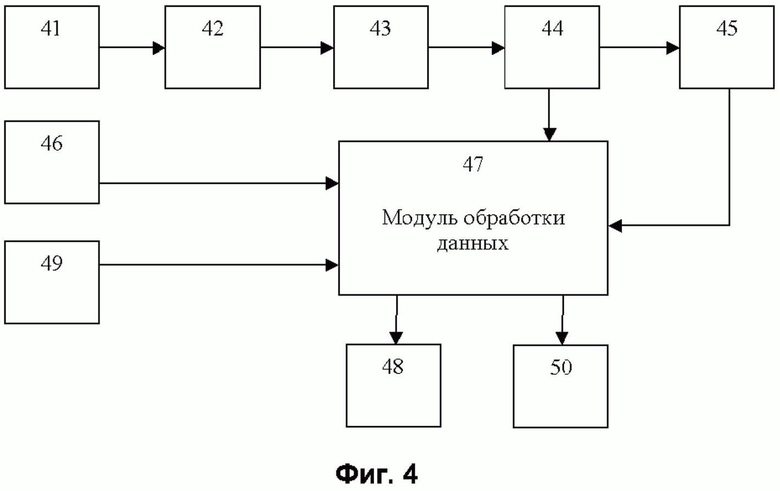
Фиг.4 - структурная схема регистратора в первом варианте осуществления;
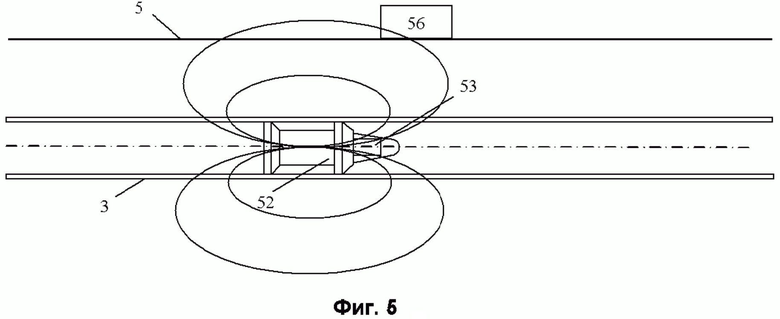
Фиг.5 - схема размещения снаряда и регистратора согласно второму варианту осуществления;
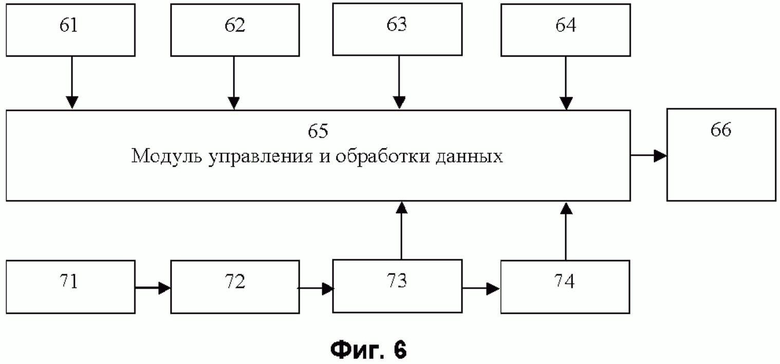
Фиг.6 - структурная схема оборудования внутритрубного снаряда во втором варианте осуществления;
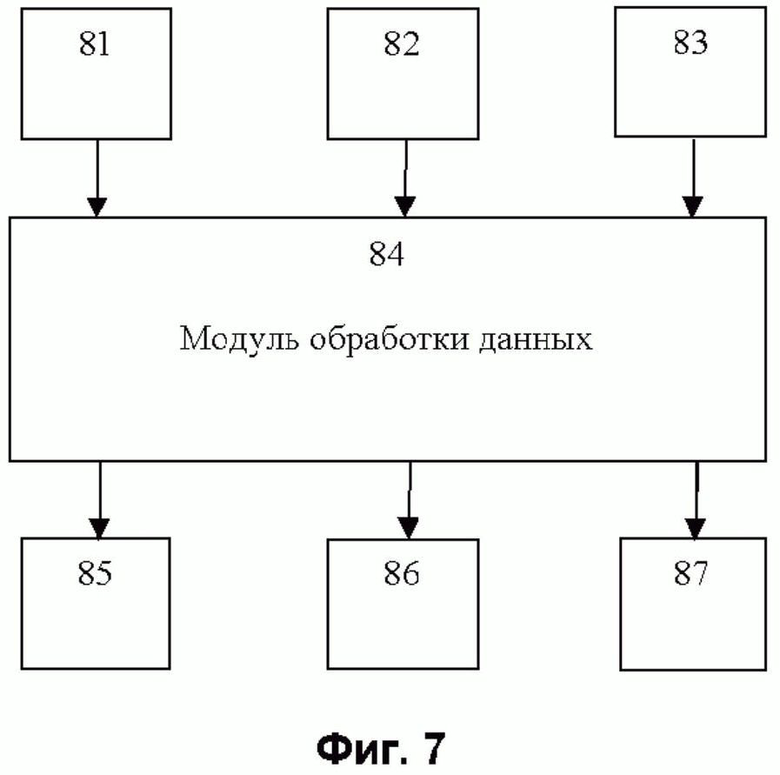
Фиг.7 - структурная схема регистратора во втором варианте осуществления.
В первом варианте осуществления, представленном на Фиг.1, система отслеживания траектории движения внутритрубного снаряда содержит передатчик 1, установленный на внутритрубном снаряде 2, а также регистратор с приемником 6, установленный над землей вне трубы 3. На Фиг.1 показана схема размещения снаряда 2 с передатчиком 1 и регистратора с приемником 6. Передатчик 1 устанавливают в корпусе внутритрубного снаряда 2, который пропускают внутри трубопровода 3, ось которого показана позицией 4. На поверхности 5 земли вблизи трубопровода 3 устанавливают регистратор с приемником 6. Передатчик 1 представляет собой генератор электромагнитных сигналов с управляемой частотой.
Структурная схема оборудования внутритрубного снаряда показана на Фиг.3. Измерительная система снаряда 2 содержит часы 31 снаряда, датчики 32 пройденного пути, модули датчиков 33, чувствительных к дефектам стенки трубопровода 3, модуль датчиков 34 инерциальной навигации, модуль 35 управления и обработки данных, накопитель 36 данных снаряда. В представленном варианте исполнения в снаряде 2 также установлен передатчик 37 электромагнитных сигналов. Датчики пройденного пути 32 выполнены в виде одометров, одометр содержит колесо, прижимаемое к внутренней поверхности трубопровода и способное катиться по ней при движении снаряда внутри трубопровода, а также датчик перемещений колеса, способный генерировать импульсы, число которых пропорционально пройденной снарядом дистанции. Модуль 34 датчиков инерциальной навигации включает в себя три взаимно ортогональных акселерометра и три взаимно ортогональных датчика угла поворота.
Модуль 33 датчиков, чувствительных к дефектам стенки трубопровода, может включать в себя датчики неразрушающего контроля, а также электронные модули для запуска или опроса датчиков, оцифровки, преобразования и кодирования данных измерений. Датчики неразрушающего контроля могут быть выполнены в виде ультразвуковых датчиков, способных генерировать ультразвуковые импульсы перпендикулярно внутренней поверхности стенки трубы и принимать соответствующие ультразвуковые импульсы, отраженные от внутренней и от внешней поверхности трубы для определения толщины стенки трубы и выявления, таким образом, мест утонения стенки. В альтернативном исполнении датчики неразрушающего контроля могут быть выполнены в виде ультразвуковых датчиков, способных излучать ультразвуковые импульсы под острым углом к поверхности трубы для обнаружения трещин, или в виде магнитострикционных или электромагнитно-акустических преобразователей, а также в виде датчиков магнитного поля или иных датчиков неразрушающего контроля.
Модуль 35 управления и обработки данных может быть выполнен в виде интегрированной печатной платы, содержащей центральный микропроцессор, микроконтроллеры, шины данных, а также разъемы для подключения к модулям 33, 34 датчиков, одометра 32 , накопителя 36 данных и передатчика 37 электромагнитных сигналов. Часы 31 снаряда могут быть установлены на той же интегрированной плате. Передатчик 37 электромагнитных колебаний содержит модуль кодирования показаний бортовых часов и подключенный к нему генератор низкочастотных электромагнитных колебаний частотой 20-25 Гц, содержащий антенну в виде катушки индуктивности с ферритовым сердечником.
На Фиг.4 представлена структурная схема аппаратуры регистратора в соответствии с первым вариантом осуществления. В описываемом варианте осуществления регистратор содержит последовательно соединенные антенну 41, антенный усилитель 42, фильтр 43, усилитель 44 с автоматической регулировкой усиления, синхронный детектор 45, а также часы 46, модуль 47 обработки данных, накопитель 48 данных регистратора, приемник 49 спутниковых сигналов, модуль 50 индикации. Модуль 47 обработки данных содержит аналого-цифровой преобразователь и микроконтроллер для обработки цифровых данных. Синхронный детектор 45 представляет собой модуль декодирования сигнала. Модуль индикации 50 может включать в себя светодиоды и звуковой динамик или жидкокристаллическую панель.
Система работаем следующим образом. Перед выполнением пропуска снаряда 2 бортовые часы 31 снаряда синхронизируют с часами 46 регистратора, при этом на часах 31 и часах 46 выставляется одно и то же время. Снаряд 2 помещают в камеру запуска трубопровода 3 и включают перекачку продукта, транспортируемого по трубопроводу 3. Под давлением перекачиваемого продукта снаряд 2 перемещается внутри трубопровода 3. На трассе прокладки трубопровода 3 выбираются контрольные точки на расстоянии от 2 до 5 км одна от другой, в которых должен размещаться регистратор для приема сигналов от снаряда. Контрольные точки, как правило, выбираются в местах пересечения трубопровода 3 с дорогами, реками, линиями коммуникаций, в местах изгиба трубопровода 3 и местах установки трубопроводной арматуры.
В то время как снаряд 2 движется внутри трубопровода 3, оператор выезжает к месту расположения ближайшей намеченной контрольной точки, размещает регистратор 6 непосредственно вблизи контрольной точки трубопровода 3 и включает регистратор 6 на прием сигналов от снаряда 2. Когда регистратор 6 начинает принимать сигналы от передатчика 1 электромагнитных сигналов снаряда 2, модуль 50 индикации регистратора 6 сигнализирует оператору об этом. Модуль 50 индикации сигнализирует о том, что снаряд 2 прошел через контрольную точку трубопровода 3 и удаляется от оператора. После этого оператор перемещается к месту следующей намеченной контрольной точки трубопровода 3.
Во время движения снаряда 2 внутри трубопровода 3 с помощью измерительной системы, расположенной в снаряде 2, измеряют параметры, характеризующие движение снаряда 2 внутри трубопровода 3, а также измеряют характеристики стенки трубопровода 3, позволяющие идентифицировать дефекты стенки. С помощью одометров 32 измеряют пройденную внутри трубопровода 3 дистанцию, с помощью датчиков 34 инерциальной навигации (акселерометров и датчиков угловых скоростей) измеряют ускорения и угловые скорости снаряда 2, с помощью датчиков 33 неразрушающего контроля, выполненных в виде ультразвуковых датчиков, излучают зондирующие ультразвуковые сигналы в направлении стенки трубопровода 3 и принимают от указанных датчиков 33 сигналы, соответствующие приему ультразвуковых волн, отраженных от внутренней поверхности трубы трубопровода 3, и сигналы, соответствующие приему ультразвуковых волн, отраженных от внешней поверхности трубы трубопровода 3. От часов 31, расположенных в снаряде 2, принимают сигналы времени по часам снаряда 2. Сигналы, полученные от часов 31, модулей 32, 33, 34, обрабатывают в модуле 35 управления и обработки данных и записывают их в накопитель 36 данных, расположенный в снаряде 2, с привязкой ко времени по часам 31.
Во время движения снаряда 2 внутри трубопровода 3 с помощью модуля кодирования показаний бортовых часов 38 кодируют сигнал передатчика 1 электромагнитных колебаний. Значение в последнем десятичном разряде в значении времени по бортовым часам 31 снаряда используют как временную характеристику, которую передают с помощью передатчика 1 электромагнитных колебаний.
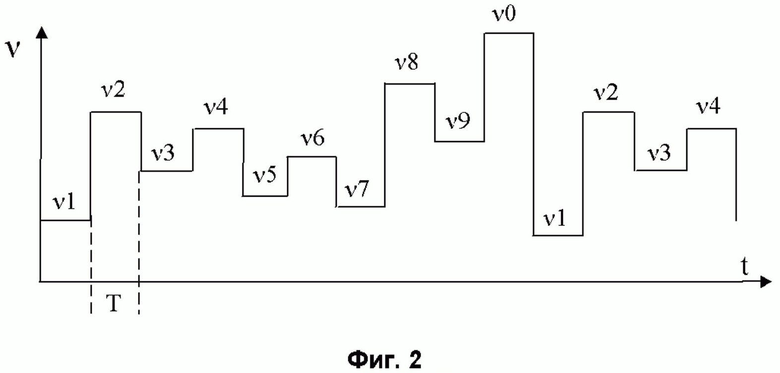
Для кодирования сигнала передатчика 1 электромагнитных колебаний с периодом 1 с изменяют частоту электромагнитных колебаний в зависимости от значения последнего разряда показания бортовых часов (от 0 до 9). На Фиг.2 показана возможная зависимость частоты электромагнитных колебаний, излучаемых передатчиком 1, в зависимости от времени t. T - период изменения частоты. Т представляет собой дискрет (квант) времени - промежуток времени, в течение которого частота электромагнитных колебаний не меняется. В предпочтительном исполнении период Т составляет одну секунду. Частоты ν могут составлять следующие значения:
ν1 = 22,05 Гц;
ν2 = 22,40 Гц;
ν3 = 22,20 Гц;
ν4 = 22,35 Гц;
ν5 = 22,15 Гц;
ν6 = 22,25 Гц;
ν7 = 22,10 Гц;
ν8 = 22,45 Гц;
ν9 = 22,30 Гц;
ν0 = 22,50 Гц.
Частоту электромагнитных колебаний в представленном варианте осуществления изменяют дискретно, в дискретной последовательности устанавливаемых значений частот электромагнитных колебаний при каждом последующем изменении частоты электромагнитных колебаний знак изменения частоты меняют на противоположный. Передатчик 37 электромагнитных сигналов представляет собой передатчик с управляемой частотой электромагнитных сигналов. С выхода модуля кодирования показаний бортовых часов 38 на вход передатчика 37 электромагнитных сигналов поступает управляющий сигнал, которому однозначно соответствует частота электромагнитных сигналов, передаваемых передатчиком 37. Если с выхода часов 31 снаряда поступает значение 2403 (2403 секунды с момента синхронизации часов перед запуском снаряда 2), то берется значение последнего десятичного разряда - то есть 3. Значению 3 соответствует частота ν3 = 22,20 Гц, поэтому в этот момент начинает излучаться электромагнитный сигнал частотой 22,20 Гц, который излучается в течение 1 секунды. Через 1 секунду с выхода часов снаряда 31 поступает значение 2404, и, поскольку значение младшего десятичного разряда равно 4, частота электромагнитного сигнала, излучаемого передатчиком 37, меняется и становится равной 22,35 Гц.
В местах нахождения регистратора 6 с внешней стороны трубопровода 3 вблизи контрольных точек с помощью регистратора 6 принимают временную характеристику, переданную с помощью передатчика 37 электромагнитных сигналов, по которой можно определить разность показаний бортовых часов 31 снаряда и часов 46 регистратора на момент прохождения снаряда вблизи регистратора. Электромагнитный сигнал принимают в антенне 41, усиливают в усилителе 42, фильтруют в фильтре 43, дополнительно усиливают в усилителе 44 с автоматической регулировкой усиления, после этого сигнал поступает на вход синхронного детектора 45, с помощью которого определяют частоту принятого электромагнитного сигнала. На выходе синхронного детектора 45 формируется кодированный цифровой сигнал, однозначно соответствующий частоте принятого электромагнитного сигнала, который поступает на вход модуля 47 обработки данных. Сигналы от часов 46 регистратора также поступают на вход модуля 47 обработки данных.
С помощью приемника 49 спутниковых сигналов от искусственных спутников Земли принимают значения спутникового времени, а также характеристики, позволяющие определить географическое положение регистратора 6, указанные значения записывают в накопитель 48 данных регистратора. В накопитель 48 данных регистратора оператор может записывать также геометрические параметры, характеризующие положение регистратора 6 относительно трубопровода 3.
С выхода усилителя 44 с автоматической регулировкой усиления сигнал поступает на вход модуля 47 обработки данных, в котором измеряют фазу принимаемых сигналов, и по зависимости изменения фазы от времени идентифицируют момент прохождения снаряда 2 вблизи регистратора 6. При идентификации прохождения снаряда 2 вблизи регистратора 6 модуль 47 обработки данных формирует управляющий сигнал, поступающий на модуль 50 индикации, сигнализирующий оператору о том, что снаряд 2 прошел мимо регистратора 6. Кроме того, формируется блок данных, содержащих код, однозначно соответствующий частоте принятого электромагнитного сигнала, которая определена с помощью синхронного детектора 45. Указанный блок данных содержит также значение времени по часам 46 регистратора, а также значение спутникового времени и GPS-координаты, определенные с помощью приемника 49 спутниковых сигналов. Указанный блок данных записывают в накопитель 48 данных, расположенный в регистраторе 6. В альтернативном исполнении в накопитель 48 данных может записываться зависимость фазы принятого электромагнитного сигнала от времени с привязкой к значениям времени по часам 46, спутниковому времени и геодезическим координатам для последующего определения момента прохождения снаряда 2 вблизи регистратора 6 уже после завершения пропуска снаряда 2 внутри трубопровода 3.
После выполнения пропуска снаряда 2 по трубопроводу 3 снаряд 2 извлекают из камеры приема трубопровода 3, подключают к электронной системе снаряда 2 переносной компьютер (ноутбук), и переписывают данные из накопителя 36 данных снаряда в накопитель данных ноутбука. Также ноутбук подключают к электронной системе регистратора 6 и переписывают данные из накопителя 48 данных регистратора в накопитель данных ноутбука. Дальнейшую обработку данных производят на стороннем компьютере, в качестве которого может выступать ноутбук или иной компьютер, на который переносят данные из накопителя данных ноутбука. В процессе обработки данных на стороннем компьютере совмещают данные, привязанные к показаниям бортовых часов 31, с данными, привязанными к показаниям часов 46 регистратора 6, а при необходимости и с записанными значениями спутникового времени и геодезическими координатами (координатами GPS или ГЛОНАСС).
Для совмещения данных считывают характеристики, привязанные к показаниям часов 31 снаряда, а также характеристики, привязанные к показаниям часов 46 регистратора и показаниям часов спутникового времени, по частоте переданного кодированного сигнала, изначально записанного в накопителе 48 данных регистратора 6, определяют разность показаний часов 31 снаряда и часов 46 регистратора. Так, если частота принятого электромагнитного сигнала составила 22,20 Гц, это означает, что в показаниях часов 31 снаряда в последнем разряде было значение 3 (3 секунды). Если при этом по часам 46 регистратора в последнем разряде было значение 5, то разница показаний часов в этой контрольной точке составляет +2 секунды для часов 46 регистратора относительно часов 31 снаряда.
Если в предыдущей контрольной точке и последующей контрольной точке разница показаний часов также составляла +2 секунды, то для приведения в соответствие с едиными часами - часами 46 регистратора для характеристик, изначально записанных в накопитель данных снаряда, к временной привязке по часам снаряда 31 добавляют 2 секунды и перезаписывают упомянутые характеристики с новой временной привязкой.
Если в предыдущей контрольной точке разница показаний часов составляла +1 секунда, то для приведения в соответствие с едиными часами - часами 46 регистратора для характеристик, изначально записанных в накопитель данных снаряда, к временной привязке по часам 31 снаряда добавляют значение, определяемое как линейная функция, изменяющаяся от 1 секунды в предыдущей контрольной точке, до 2 секунд в заданной контрольной точке. Таким образом, осуществляется линейная аппроксимация временного сдвига по мере движения снаряда 2 от одной контрольной точки к другой. Аналогичным образом при необходимости осуществляется привязка записанных характеристик к спутниковым часам.
После выполнения пропуска снаряда на указанном ранее стороннем компьютере идентифицируют дефекты стенки трубопровода 3 и по зависимостям пройденной внутри трубопровода 3 дистанции определяют их положение на трубопроводе. По значениям ускорений и угловых скоростей снаряда определяют траекторию движения снаряда 2 с привязкой ко времени, которая соответствует траектории прокладки обследованного трубопровода 3. Поскольку все измеренные физические величины записаны с привязкой ко времени, в том числе и характеристики стенки трубопровода, временная метка, соответствующая обнаруженному дефекту, позволяет сопоставить точку на указанной траектории движения снаряда, соответствующую той же временной метке, что позволяет определить местоположение обнаруженного дефекта на трубопроводе 3 в локальной системе координат.
Поскольку в накопителе 48 данных регистратора записывались геодезические координаты регистратора (координаты GPS или ГЛОНАСС) и геометрические параметры, характеризующие положение регистратора 6 относительно трубопровода 3, это позволяет определить геодезические координаты контрольных точек трубопровода 3, через которые проходил снаряд 2 в процессе движения внутри трубопровода 3. Поскольку известна траектория прокладки трубопровода в локальной системе координат и геодезические координаты контрольных точек трубопровода 3, это позволяет определить траекторию прокладки трубопровода в геодезических координатах, а также геодезические координаты обнаруженных дефектов трубопровода 3.
Во втором варианте осуществления, представленном на Фиг.5, система отслеживания траектории движения внутритрубного снаряда содержит передатчик 56, установленный в регистраторе, а также приемник 53, установленный во внутритрубном снаряде 52. На корпусе снаряда 52 установлены постоянные магниты так, чтобы вне трубопровода можно было зарегистрировать магнитное поле указанных магнитов. Приемник 53 устанавливают в корпусе внутритрубного снаряда 52, который пропускают внутри трубопровода 3. На поверхности 5 земли вблизи трубопровода 3 устанавливают регистратор 56 с передатчиком. Передатчик представляет собой генератор электромагнитных сигналов с управляемой частотой.
Структурная схема оборудования внутритрубного снаряда в соответствии со вторым вариантом осуществления показана на Фиг.6. Измерительная система 52 снаряда содержит часы 61 снаряда, датчики 62 пройденного пути, модуль 63 датчиков неразрушающего контроля, чувствительных к дефектам стенки трубопровода 3, модуль 64 датчиков инерциальной навигации, модуль 65 управления и обработки данных, накопитель 66 данных снаряда, а также последовательно соединенные антенну 71, антенный усилитель 72, фильтр 73, синхронный детектор 74. Выходы фильтра 73 и синхронного детектора 74 подключены к входам модуля 65 управления и обработки данных. В представленном варианте исполнения в снаряде 52 также установлен приемник электромагнитных сигналов. Датчики 62 пройденного пути выполнены в виде одометров, модуль 64 датчиков инерциальной навигации включает в себя три взаимно ортогональных акселерометра и три взаимно ортогональных датчика угла поворота. Модуль 63 датчиков могут включать в себя датчики неразрушающего контроля, а также электронные модули для запуска или опроса датчиков, оцифровки, преобразования и кодирования данных измерений. Датчики неразрушающего контроля могут быть выполнены в виде ультразвуковых датчиков.
Модуль 65 управления и обработки данных может быть выполнен в виде интегрированной печатной платы, содержащей центральный микропроцессор, микроконтроллеры, шины данных, а также разъемы для подключения к модулям 63, 64 датчиков, одометра 62, накопителя 66 данных и приемника 53 электромагнитных сигналов. Часы 61 снаряда могут быть установлены на той же интегрированной плате. Синхронный детектор 74 представляет собой модуль декодирования сигнала.
На Фиг.7 представлена структурная схема аппаратуры регистратора в соответствии со вторым вариантом осуществления. В описываемом варианте осуществления регистратор 56 содержит часы 81, датчик 82 магнитного поля, приемник 83 спутниковых сигналов, модуль 84 обработки данных, накопитель 85 данных регистратора, модуль 86 индикации, передатчик 87 электромагнитных сигналов. Модуль 84 обработки данных содержит аналого-цифровой преобразователь и микроконтроллер для обработки цифровых данных. Модуль 80 индикации может включать в себя светодиоды и звуковой динамик или жидкокристаллическую панель.
Система работает следующим образом. Перед выполнением пропуска снаряда 52 бортовые часы 61 снаряда синхронизируют с часами 81 регистратора, при этом на часах 61 и часах 81 выставляется одно и то же время. Снаряд 52 помещают в камеру запуска трубопровода 3 и включают перекачку продукта, транспортируемого по трубопроводу 3. Под давлением перекачиваемого продукта снаряд 52 перемещается внутри трубопровода 3. На трассе прокладки трубопровода 3 выбираются контрольные точки на расстоянии от 2 до 5 км одна от другой, в которых должен размещаться регистратор для регистрации момента прохождения снаряда мимо регистратора. Контрольные точки, как правило, выбираются в местах пересечения трубопровода 3 с дорогами, реками, линиями коммуникаций, в местах изгиба трубопровода 3 и местах установки трубопроводной арматуры.
В то время как снаряд 52 движется внутри трубопровода 3, оператор выезжает к месту расположения ближайшей намеченной контрольной точки, размещает регистратор 56 непосредственно вблизи контрольной точки трубопровода 3 и включает регистратор 56 на прием сигналов от датчика 82 магнитного поля регистратора 56. Когда регистратор 56 регистрирует рост напряженности магнитного поля вблизи контрольной точки, модуль 86 индикации регистратора 56 сигнализирует оператору об этом, что означает приближение снаряда 52 к контрольной точке. Оператор включает излучение электромагнитного сигнала с помощью передатчика 87 электромагнитных сигналов, установленного в корпусе регистратора 56 или подключенного к модулю управления регистратора 56. С помощью модуля 84 обработки данных кодируют сигнал передатчика 87 электромагнитных колебаний в зависимости от показаний часов 81 регистратора. Значение в последнем десятичном разряде в значении времени по часам 81 регистратора используют как временную характеристику, которую передают с помощью передатчика 87 электромагнитных колебаний.
Для кодирования сигнала передатчика 87 электромагнитных колебаний с периодом 1 с изменяют частоту электромагнитных колебаний в зависимости от значения последнего разряда показания бортовых часов (от 0 до 9). На Фиг.2 показана возможная зависимость частоты электромагнитных колебаний, излучаемых передатчиком 87, в зависимости от времени t. T - период изменения частоты. Т представляет собой дискрет (квант) времени - промежуток времени, в течение которого частота электромагнитных колебаний не меняется. В предпочтительном исполнении период Т составляет одну секунду. Частоты ν могут составлять следующие значения:
ν1 = 22.05 Гц;
ν2 = 22.40 Гц;
ν3 = 22.20 Гц;
ν4 = 22.35 Гц;
ν5 = 22.15 Гц;
ν6 = 22.25 Гц;
ν7 = 22.10 Гц;
ν8 = 22.45 Гц;
ν9 = 22.30 Гц;
ν10 = 22.50 Гц.
Частоту электромагнитных колебаний в представленном варианте исполнения изменяют дискретно, в дискретной последовательности устанавливаемых значений частот электромагнитных колебаний при каждом последующем изменении частоты электромагнитных колебаний знак изменения частоты меняют на противоположный.
С помощью приемника 83 спутниковых сигналов от искусственных спутников Земли принимают значения спутникового времени, а также характеристики, позволяющие определить географические координаты регистратора 56. В модуле обработке данных периодически формируется блок данных, который включает в себя значение времени по часам 81 регистратора, значение спутникового времени и географические координаты, полученные с помощью приемника 83 спутниковых сигналов, а также сигнал с датчика 82 магнитного поля, указанные блоки данных записываются в накопитель 85 данных регистратора. В накопитель 85 данных регистратора оператор может записывать также геометрические параметры, характеризующие положение регистратора 56 относительно трубопровода 3.
При снижении напряженности магнитного поля, регистрируемого датчиком 82 магнитного поля, модуль 86 индикации сигнализирует об этом, что означает, что снаряд 52 прошел через контрольную точку трубопровода 3 и удаляется от оператора. После этого оператор перемещается к месту следующей намеченной контрольной точки трубопровода 3.
Во время движения снаряда 52 внутри трубопровода 3 с помощью измерительной системы, расположенной в снаряде 52, измеряют параметры, характеризующие движение снаряда 52 внутри трубопровода 3, а также измеряют характеристики стенки трубопровода 3, позволяющие идентифицировать дефекты стенки. С помощью одометров 62 измеряют пройденную внутри трубопровода 3 дистанцию, с помощью датчиков 64 инерциальной навигации (акселерометров и датчиков угловых скоростей) измеряют ускорения и угловые скорости снаряда 52, с помощью датчиков 63 неразрушающего контроля, выполненных в виде ультразвуковых датчиков, излучают зондирующие ультразвуковые сигналы в направлении стенки трубопровода 3 и принимают от указанных датчиков 63 сигналы, соответствующие приему ультразвуковых волн, отраженных от внутренней поверхности трубы трубопровода 3, и сигналы, соответствующие приему ультразвуковых волн, отраженных от внешней поверхности трубы трубопровода 3. От часов 61, расположенных в снаряде 52, принимают сигналы времени по часам снаряда 52. Сигналы, полученные от часов 61, модулей 62, 63, 64, обрабатывают в модуле 65 управления и обработки данных и записывают их в накопитель 66 данных, расположенный в снаряде 52, с привязкой ко времени по часам 61.
С помощью приемника 53, расположенного в снаряде 52, принимают временную характеристику, переданную с помощью передатчика 87 электромагнитных сигналов, по которой можно определить разность показаний бортовых часов 61 снаряда и часов 81 регистратора на момент прохождения снаряда 52 вблизи регистратора 56. Электромагнитный сигнал принимают в антенне 71, усиливают в усилителе 72, фильтруют в фильтре 73, после этого сигнал поступает на вход синхронного детектора 74, с помощью которого определяют частоту принятого электромагнитного сигнала. На выходе синхронного детектора 74 формируется кодированный цифровой сигнал, однозначно соответствующий частоте принятого электромагнитного сигнала, который поступает на вход модуля 65 управления и обработки данных. Сигналы от часов 61 снаряда также поступают на вход модуля 65 управления и обработки данных.
С выхода фильтра 73 сигнал поступает на вход модуля 65 управления и обработки данных, в котором измеряют фазу принимаемых сигналов, и по зависимости изменения фазы от времени идентифицируют момент прохождения снаряда 52 вблизи регистратора 56. При идентификации прохождения снаряда 52 вблизи регистратора 56 модуль 65 управления и обработки данных формирует блок данных, содержащих код, однозначно соответствующий частоте принятого электромагнитного сигнала, которая определена с помощью синхронного детектора 74. Указанный блок данных содержит также значение времени по часам 61 снаряда. Указанный блок данных записывают в накопитель 66 данных, расположенный в снаряде 52. В альтернативном исполнении в накопитель 66 данных может записываться зависимость фазы принятого электромагнитного сигнала от времени с привязкой к значениям времени по часам 61 для последующего определения момента прохождения снаряда 52 вблизи регистратора 56 уже после завершения пропуска снаряда 52 внутри трубопровода 3.
После выполнения пропуска снаряда 52 по трубопроводу 3 снаряд 52 извлекают из камеры приема трубопровода 3, подключают к электронной системе снаряда 52 переносной компьютер (ноутбук) и переписывают данные из накопителя 66 данных снаряда в накопитель данных ноутбука. Также ноутбук подключают к электронной системе регистратора 56 и переписывают данные из накопителя 85 данных регистратора в накопитель данных ноутбука. Дальнейшую обработку данных производят на стороннем компьютере, в качестве которого может выступать ноутбук или иной компьютер, на который переносят данные из накопителя данных ноутбука. В процессе обработки данных на стороннем компьютере совмещают данные, привязанные к показаниям бортовых часов 61, с данными, привязанными к показаниям часов 81 регистратора 56, а при необходимости и с записанными значениями спутникового времени и геодезическими координатами (координатами GPS или ГЛОНАСС).
Для совмещения данных считывают характеристики, привязанные к показаниям часов 61 снаряда, а также характеристики, привязанные к показаниям часов 81 регистратора и показаниям часов спутникового времени, по частоте переданного кодированного сигнала, изначально записанного в накопителе 66 данных снаряда, определяют разность показаний часов 61 снаряда и часов 81 регистратора. Так, если частота принятого приемником 53 электромагнитного сигнала составила 22,15 Гц, это означает, что в показаниях часов 81 регистратора в последнем разряде было значение 5 (5 секунд). Если при этом по часам 61 снаряда в последнем разряде было значение 3, то разница показаний часов в этой контрольной точке составляет -2 секунды для часов 61 снаряда относительно часов 81 регистратора.
Если в предыдущей контрольной точке и последующей контрольной точке разница показаний часов также составляла также -2 секунды, то для приведения в соответствие с едиными часами - часами 81 регистратора для характеристик, изначально записанных в накопитель данных снаряда, к временной привязке по часам 61 снаряда добавляют 2 секунды и перезаписывают упомянутые характеристики с новой временной привязкой.
Если в предыдущей контрольной точке разница показаний часов составляла -1 секунда по часам 61 снаряда относительно часов 81 регистратора, то для приведения в соответствие с едиными часами - часами 81 регистратора для характеристик, изначально записанных в накопитель данных снаряда, к временной привязке по часам 61 снаряда добавляют значение, определяемое как линейная функция, изменяющаяся от 1 секунды в предыдущей контрольной точке до 2 секунд в заданной контрольной точке. Таким образом, осуществляется линейная аппроксимация временного сдвига по мере движения снаряда 52 от одной контрольной точки к другой. Аналогичным образом при необходимости осуществляется привязка записанных характеристик к времени по спутниковым часам, определяемому с помощью приемника 83 спутниковых сигналов.
После выполнения пропуска снаряда 52 на указанном ранее стороннем компьютере идентифицируют дефекты стенки трубопровода 3 и по зависимостям пройденной внутри трубопровода 3 дистанции определяют их положение на трубопроводе. По значениям ускорений и угловых скоростей снаряда определяют траекторию движения снаряда 52 с привязкой ко времени, которая соответствует траектории прокладки обследованного трубопровода 3. Поскольку все измеренные физические величины записаны с привязкой ко времени, в том числе и характеристики стенки трубопровода 3, временная метка, соответствующая обнаруженному дефекту, позволяет сопоставить точку на указанной траектории движения снаряда 52, соответствующую той же временной метке, что позволяет определить местоположение обнаруженного дефекта на трубопроводе 3 в локальной системе координат.
Поскольку в накопителе 56 данных регистратора записывались геодезические координаты регистратора 56 (координаты GPS или ГЛОНАСС) и геометрические параметры, характеризующие положение регистратора 56 относительно трубопровода 3, это позволяет определить геодезические координаты контрольных точек трубопровода 3, через которые проходил снаряд 52 в процессе движения внутри трубопровода 3. Поскольку известна траектория прокладки трубопровода в локальной системе координат и геодезические координаты контрольных точек трубопровода 3, это позволяет определить траекторию прокладки трубопровода в геодезических координатах, а также геодезические координаты обнаруженных дефектов трубопровода 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВНУТРИТРУБНЫЙ СНАРЯД С СИСТЕМОЙ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ДАННЫХ | 2013 |
|
RU2635016C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| КОМПЛЕКС ДЛЯ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2012 |
|
RU2511057C1 |
| СПОСОБ ЭКСТРЕННОЙ ДИАГНОСТИКИ ТРУБОПРОВОДОВ ВЫСОКОГО ДАВЛЕНИЯ | 2010 |
|
RU2442072C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МАРКИРОВАНИЯ И УПРАВЛЕНИЯ ВНУТРИТРУБНЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2215932C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛАНОВО-ВЫСОТНОГО ПОЛОЖЕНИЯ ПОДЗЕМНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2012 |
|
RU2527902C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СОСТОЯНИЯ ВНУТРИТРУБНЫХ ОБЪЕКТОВ | 2002 |
|
RU2204760C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ УЧАСТКОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ С МАКСИМАЛЬНОЙ ДЕФОРМАЦИЕЙ | 2004 |
|
RU2272248C1 |
| СПОСОБ ДИАГНОСТИКИ РОВНОСТИ ПОВЕРХНОСТИ ДОРОЖНОГО ПОКРЫТИЯ | 2012 |
|
RU2519002C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХМОДУЛЬНЫМ ДЕФЕКТОСКОПОМ-СНАРЯДОМ В ПРОЦЕССЕ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2425278C1 |
Изобретение относится к системам контроля состояния магистральных и промысловых нефтепроводов, газопроводов и нефтепродуктопроводов и может быть использовано для отслеживания прохождения внутри обследуемых трубопроводов внутритрубных диагностических снарядов и определения местоположения особенностей трубопроводов. Техническим результатом является повышение точности определения времени прохождения внутритрубного снаряда вблизи контрольных точек и тем самым точности определения положения особенностей трубопровода. Этот результат достигается тем, что снаряд пропускают внутри трубопровода, измеряют измерительной системой снаряда физические величины, характеризующие состояние и/или характеристики снаряда и/или трубопровода, и записывают их в накопитель данных снаряда с привязкой ко времени по часам снаряда. С помощью регистратора, установленного вблизи контрольной точки трубопровода, измеряют физические величины, позволяющие идентифицировать прохождение снаряда вблизи регистратора, формируют и записывают в накопитель данных регистратора характеристики, идентифицирующие соответствующие моменты времени прохождения снаряда по часам регистратора. С помощью передатчика, расположенного в одном из пары объектов, состоящей из снаряда и регистратора, передают сигнал с временной характеристикой, связанной с показаниями часов на стороне передатчика; принимают переданный сигнал приемником, расположенным в другом из указанной пары объектов, и записывают в накопитель данных на стороне приемника характеристику, связанную с временной характеристикой принятого сигнала, с привязкой к часам на стороне приемника. Определяют разность показаний часов на стороне передатчика и приемника, тем самым величину расхождения времени по часам регистратора и снаряда, и используют ее в контрольной точке для определения характеристик трубопровода. 2 н. и 36 з.п. ф-лы, 7 ил.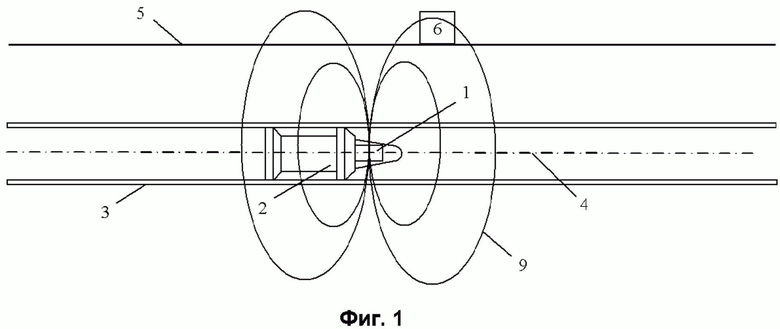
1. Способ отслеживания движения внутритрубного снаряда, при котором
снаряд пропускают внутри трубопровода, измеряют с помощью измерительной системы в снаряде физические величины, характеризующие состояние и/или характеристики снаряда и/или трубопровода, и записывают их в накопитель данных снаряда с привязкой ко времени, определяемому по часам снаряда;
с внешней стороны трубопровода с помощью по меньшей мере одного регистратора, установленного вблизи контрольной точки трубопровода, измеряют напряженность магнитного поля или иные физические величины, позволяющие идентифицировать прохождение снаряда вблизи регистратора, с привязкой ко времени, определяемому по часам регистратора, и на основании упомянутых измеренных физических величин и соответствующих им значений времени формируют характеристики, позволяющие идентифицировать моменты времени прохождения снаряда вблизи регистратора по часам регистратора, и записывают сформированные характеристики в накопитель данных регистратора;
во время пропуска снаряда внутри трубопровода с помощью передатчика, расположенного в одном из пары объектов, состоящей из снаряда и регистратора, передают сигнал с временной характеристикой, связанной с показаниями часов на стороне упомянутого передатчика;
принимают переданный сигнал с временной характеристикой с помощью приемника, расположенного в другом из указанной пары объектов, и записывают в накопитель данных на стороне упомянутого приемника по меньшей мере одну характеристику, связанную с временной характеристикой принятого сигнала, с привязкой к часам на стороне упомянутого приемника;
определяют разность показаний часов на стороне передатчика и часов на стороне приемника, тем самым величину расхождения времени по часам регистратора и снаряда, и используют упомянутую величину расхождения времени в контрольной точке для определения характеристик трубопровода.
2. Способ по п. 1, в котором в качестве упомянутого передатчика используют передатчик электромагнитных колебаний, и в качестве упомянутого приемника используют приемник электромагнитных колебаний,
при этом упомянутый передаваемый сигнал кодируют путем изменения частоты электромагнитных колебаний в зависимости от значения передаваемой временной характеристики, и при приеме переданного кодированного сигнала определяют частотные характеристики электромагнитных колебаний, соответствующие переданному кодированному сигналу, и записывают их в накопитель данных на стороне приемника вместе с временем по часам на стороне приемника,
после выполнения пропуска снаряда совмещают данные, записанные в накопителе данных снаряда, с данными, записанными в накопителе данных регистратора, при этом по частотным характеристикам переданного кодированного сигнала передатчика, записанного в накопителе данных на стороне приемника, определяют разность показаний часов на стороне передатчика и показаний часов на стороне приемника, из накопителя данных на стороне передатчика считывают характеристики, привязанные к показаниям часов на стороне передатчика, а из накопителя данных на стороне приемника считывают характеристики, привязанные к показаниям часов на стороне приемника, и перезаписывают упомянутые характеристики с привязкой к показаниям одних и тех же часов для характеристик, записанных на стороне приемника, и для характеристик, записанных на стороне передатчика.
3. Способ по п. 2, в котором в качестве частотной характеристики электромагнитных колебаний определяют частоту электромагнитных колебаний в течение периода измерения упомянутой частоты.
4. Способ по п. 2, в котором частоту электромагнитных колебаний изменяют дискретно.
5. Способ по п. 2, в котором частоту электромагнитных колебаний изменяют плавно.
6. Способ по п. 4, в котором частоту электромагнитных колебаний изменяют периодически, при этом последовательность устанавливаемых значений частот электромагнитных колебаний периодически повторяют с периодом не менее периода повторения значения в младших разрядах полного значения времени.
7. Способ по п. 6, в котором в дискретной последовательности устанавливаемых значений частот электромагнитных колебаний при каждом последующем изменении частоты электромагнитных колебаний знак изменения частоты изменяют на противоположный.
8. Способ по п. 2, в котором в качестве передаваемой временной характеристики используют значение в одном или нескольких младших разрядах значения времени по часам на стороне передатчика, при этом в передаваемом сигнале с временной характеристикой, который передают в виде сигнала заданной частоты, частота однозначно соответствует значению в одном или нескольких младших разрядах.
9. Способ по любому из пп. 2-8, в котором частотные характеристики принятых электромагнитных колебаний определяют путем измерения фазы принимаемых электромагнитных колебаний и определения по измеренной фазе частоты принятых электромагнитных колебаний, при этом анализируют частотные характеристики принятых электромагнитных колебаний, идентифицируют значение упомянутой временной характеристики и записывают в накопитель данных на стороне приемника фазовые и/или частотные характеристики электромагнитных колебаний и/или временную характеристику.
10. Способ по п. 1, в котором с помощью измерительной системы, расположенной в снаряде, измеряют дистанцию, пройденную снарядом внутри трубопровода, и записывают в накопитель данных снаряда с привязкой к показаниям часов снаряда для последующего определения расстояния от соответствующей особенности трубопровода до контрольной точки.
11. Способ по п. 1, в котором с помощью находящегося в регистраторе приемника спутниковых сигналов принимают от искусственного спутника Земли сигнал спутникового времени и записывают значения спутникового времени в накопитель данных регистратора, после выполнения пропуска снаряда совмещают данные, записанные с привязкой к показаниям часов на стороне приемника и/или на стороне передатчика, с записанными значениями спутникового времени и перезаписывают упомянутые характеристики с привязкой к спутниковому времени.
12. Способ по п. 1, в котором с помощью находящегося в регистраторе приемника спутниковых сигналов принимают сигналы спутниковой системы определения местоположения, определяют на их основе геодезические координаты регистратора и записывают их в накопитель данных регистратора, а после выполнения пропуска снаряда совмещают характеристики, позволяющие идентифицировать моменты времени прохождения снаряда вблизи регистратора по часам регистратора, с геодезическими координатами регистратора и определяют геодезические координаты снаряда в контрольных точках, в которых зарегистрировано прохождение снаряда вблизи регистратора.
13. Способ по п. 12, в котором с помощью измерительной системы в снаряде измеряют дистанцию, пройденную снарядом внутри трубопровода, измеряют характеристики стенки трубопровода, позволяющие идентифицировать дефекты стенки, и после выполнения пропуска снаряда идентифицируют дефекты стенки и определяют их геодезические координаты.
14. Способ по п. 1, в котором разность показаний часов на стороне передатчика и часов на стороне приемника определяют в процессе или после выполнения пропуска снаряда.
15. Способ по любому из пп. 1-8, 10-14, в котором с помощью модуля инерциальной системы навигации, входящего в состав измерительной системы в снаряде, измеряют ускорения и угловые скорости снаряда по нескольким ортогональным осям, после выполнения пропуска по зависимостям пройденной внутри трубопровода дистанции, ускорений и угловых скоростей от времени, а также значениям геодезических координат контрольных точек, в которых снаряд прошел вблизи регистратора, определяют географическое положение траектории движения снаряда.
16. Способ по п. 1, в котором при прохождении снаряда дополнительно формируют магнитное поле с помощью расположенного на снаряде источника магнитного поля, измеряют величину магнитного поля с помощью упомянутого регистратора и идентифицируют прохождение снаряда вблизи регистратора по зависимости величины магнитного поля от времени.
17. Способ по п. 1, в котором с помощью регистратора принимают акустические колебания, связанные с прохождением снаряда внутри трубопровода, измеряют характеристики акустических колебаний, по которым идентифицируют прохождение снаряда вблизи регистратора.
18. Способ по п. 1, в котором упомянутый передатчик электромагнитных колебаний размещают в регистраторе, а упомянутый приемник электромагнитных колебаний размещают в снаряде.
19. Способ по п. 1, в котором упомянутый передатчик электромагнитных колебаний размещают в снаряде, а упомянутый приемник электромагнитных колебаний размещают в регистраторе.
20. Способ по п. 1 или 2, в котором часы на стороне приемника синхронизируют с часами на стороне передатчика перед выполнением пропуска снаряда.
21. Способ по п. 1 или 2, в котором часы на стороне приемника синхронизируют с часами на стороне передатчика в процессе пропуска снаряда.
22. Система отслеживания траектории движения внутритрубного снаряда, содержащая
внутритрубный снаряд, выполненный с возможностью перемещения внутри трубопровода;
измерительную систему снаряда для измерения физических величин, характеризующих состояние и/или характеристики снаряда и/или трубопровода;
накопитель данных снаряда для записи измеренных данных с привязкой ко времени, определяемому по часам снаряда;
по меньшей мере один регистратор, установленный вблизи контрольной точки с внешней стороны трубопровода, для измерения напряженности магнитного поля или иных физических величин, позволяющих идентифицировать прохождение снаряда вблизи регистратора, с привязкой ко времени, определяемому по часам регистратора, и формирования на основании упомянутых измеренных физических величин и соответствующих им значений времени характеристик, позволяющих идентифицировать моменты времени прохождения снаряда вблизи регистратора по часам регистратора, и содержащий накопитель данных регистратора для записи сформированных характеристик с привязкой ко времени, определяемому по часам регистратора;
передатчик, расположенный в одном из пары объектов, содержащей регистратор и снаряд, для передачи сигнала с временной характеристикой, связанной с показаниями часов на стороне упомянутого передатчика;
приемник, расположенный в другом из упомянутой пары объектов, содержащей регистратор и снаряд, для приема передаваемого сигнала с временной характеристикой, и содержащий накопитель данных для записи по меньшей мере одной характеристики, связанной с временной характеристикой принятого сигнала, с привязкой к часам на стороне упомянутого приемника;
устройство обработки для определения разности показаний часов на стороне передатчика и часов на стороне приемника, тем самым величины расхождения времени по часам регистратора и снаряда, и определения характеристик трубопровода с использованием упомянутой величины расхождения времени в контрольной точке.
23. Система по п. 22, в которой
упомянутый передатчик представляет собой передатчик электромагнитных колебаний со средством кодирования передаваемого сигнала путем изменения частоты электромагнитных колебаний в зависимости от значения передаваемой временной характеристики;
упомянутый приемник представляет собой приемник электромагнитных колебаний со средством обработки переданного кодированного сигнала и определения частотных характеристик электромагнитных колебаний, соответствующих переданному кодированному сигналу; и
упомянутое устройство обработки выполнено в возможностью определения по частотным характеристикам переданного кодированного сигнала передатчика, записанного в накопителе данных на стороне приемника, разности показаний часов на стороне передатчика и показаний часов на стороне приемника, на основе сопоставления данных, записанных в накопителе данных снаряда, с данными, записанными в накопителе данных регистратора, и перезаписи упомянутых характеристик с привязкой к показаниям одних и тех же часов.
24. Система по п. 23, в которой частота электромагнитных колебаний изменяется дискретно.
25. Система по п. 23, в которой частота электромагнитных колебаний изменяется плавно.
26. Система по п. 24, в которой частота электромагнитных колебаний изменяется периодически, при этом последовательность значений частот электромагнитных колебаний периодически повторяется.
27. Система по п. 26, в которой в последовательности значений частот электромагнитных колебаний при каждом последующем изменении частоты электромагнитных колебаний знак изменения частоты изменяется на противоположный.
28. Система по п. 23, в которой в качестве передаваемой временной характеристики используется значение в одном или нескольких младших разрядах значения времени по часам на стороне передатчика, при этом в передаваемом сигнале с временной характеристикой, представляющем собой сигнал заданной частоты, частота однозначно соответствует значению в одном или нескольких младших разрядах.
29. Система по любому из пп. 23-28, в которой упомянутый приемник выполнен с возможностью измерения фазы принимаемых электромагнитных колебаний и определения по измеренной фазе частоты принятых электромагнитных колебаний, а устройство обработки выполнено с возможностью анализа частотных характеристик принятых электромагнитных колебаний и идентификации значения упомянутой временной характеристики для записи в накопитель данных на стороне приемника фазовых и/или частотных характеристик электромагнитных колебаний и/или временной характеристики.
30. Система по п. 22, в которой измерительная система снаряда содержит средство измерения дистанции, пройденной снарядом внутри трубопровода.
31. Система по п. 22, дополнительно содержащая в регистраторе приемник спутниковых сигналов для приема от искусственного спутника Земли сигналов спутникового времени и записи значений спутникового времени в накопитель данных регистратора, при этом устройство обработки выполнено с возможностью совмещения данных, записанных с привязкой к показаниям часов на стороне приемника и/или на стороне передатчика, с записанными значениями спутникового времени и перезаписи упомянутых характеристик с привязкой к спутниковому времени.
32. Система по п. 22, дополнительно содержащая в регистраторе приемник сигналов спутниковой системы определения местоположения для определения геодезических координат регистратора и записи их в накопитель данных регистратора, при этом устройство обработки дополнительно выполнено с возможностью, после выполнения пропуска снаряда, совмещения характеристик, позволяющих идентифицировать моменты времени прохождения снаряда вблизи регистратора по часам регистратора, с геодезическими координатами регистратора и определения геодезических координат снаряда в контрольных точках, в которых зарегистрировано прохождение снаряда вблизи регистратора.
33. Система по п. 32, в которой измерительная система в снаряде выполнена с возможностью измерения пройденной снарядом дистанции и измерения характеристик стенки трубопровода, позволяющих идентифицировать дефекты стенки, а устройство обработки выполнено с возможностью идентификации дефектов стенки и определения их геодезических координат.
34. Система по п. 22, в которой измерительная система в снаряде содержит модуль инерциальной системы навигации для измерения ускорений и угловых скоростей снаряда по нескольким ортогональным осям, при этом устройство обработки выполнено с возможностью определения географического положения траектории движения снаряда на основе зависимостей пройденной внутри трубопровода дистанции, ускорений и угловых скоростей от времени, а также значений геодезических координат контрольных точек, в которых снаряд прошел вблизи регистратора.
35. Система по п. 22, дополнительно содержащая в снаряде источник магнитного поля, а в регистраторе - средство измерения величины магнитного поля для идентификации прохождения снаряда вблизи регистратора по зависимости величины магнитного поля от времени.
36. Система по п. 22, дополнительно содержащая в регистраторе средство приема акустических колебаний, связанных с прохождением снаряда внутри трубопровода, и измерения характеристик акустических колебаний для идентификации прохождения снаряда вблизи регистратора.
37. Система по п. 22, в которой упомянутый передатчик электромагнитных колебаний расположен в регистраторе, а упомянутый приемник электромагнитных колебаний расположен в снаряде.
38. Система по п. 22, в которой упомянутый передатчик электромагнитных колебаний расположен в снаряде, а упомянутый приемник электромагнитных колебаний расположен в регистраторе.
| US 6243657 B1, 05.06.2001 | |||
| US 6023986 А, 15.02.2000 | |||
| АППАРАТУРА ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ДЕФОРМАЦИЙ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2007 |
|
RU2334162C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ, ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И НАПРЯЖЕННОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 1996 |
|
RU2106569C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2248550C1 |

