Изобретение относится к способам неразрушающего контроля качества магистральных трубопроводов, в частности к способам внутритрубной дефектоскопии с помощью дефектоскопов-снарядов (Техника и технология транспорта и хранения нефти и газа, под редакций д.т.н. Новоселова В.Ф., М.: Недра, 1992, стр.210).
Известна система определения координат трассы и координат дефектов подземного трубопровода (патент RU 2261424 C1). Предлагается синхронизация данных о движении дефектоскопа-снаряда с данными наземных источников и с данными спутниковой навигационной системы.
Известно устройство получения информации о наличии дефектов в трубопроводе типа разрывов путем возбуждения в нем электромагнитных волн и приема их сквозь разрыв наземными приемными станциями (патент RU 2261424 C1). В данном устройстве все блоки, кроме передающей антенны, расположены с внешней стороны трубопровода.
Известен способ внутритрубной дефектоскопии и дефектоскоп-снаряд для его осуществления (патент RU 2109206 C1). В данном патенте дефектоскоп выполнен с возможностью определения не только разрывов, но и деформации трубопровода. Кроме того, он может передвигаться в потоке транспортируемого продукта как в направлении потока, так и против потока, по командам системы управления, установленной в дефектоскопе, а информация о состоянии трубопровода поступает на наземный пункт только после прихода туда дефектоскопа-снаряда. Анализ известных способов дефектоскопии трубопроводов позволяет сделать вывод о том, что наиболее важными вопросами дефектоскопии являются достаточность получаемой информации для оценки параметров дефектов стенок трубопровода, в том числе и деформаций трубопровода при отсутствии разрыва, своевременность ее передачи на наземные пункты и возможность внешнего управления режимами движения дефектоскопа-снаряда в процессе нахождения его в трубопроводе, в том числе и обратного движения для уточнения дефекта трубопровода и выдачи дополнительной информации на наземный пункт.
В известных способах и устройствах внутритрубной дефектоскопии нет возможности оперативно управлять режимами функционирования дефектоскопов-снарядов в процессе их нахождения и движения внутри трубопровода, особенно это важно при использовании их в магистральных трубопроводах большой протяженности между насосными станциями (более 100 км). Учитывая существенные затухания радиоволн при распространении в трубопроводе, возможные изменения в конфигурации труб газопровода, наличие изгибов, врезок с меньшим диаметром и локальных неоднородностей, необходима оптимизация как диапазона длин волн, в котором осуществляется радиосвязь, так и предельно допустимого интервала длин волн в пределах выбранного диапазона, используемого для этих целей, вне которого возможно возникновение высших типов волн с высоким затуханием или попадание в режим запредельного волновода.
Наиболее близким к предлагаемому способу является способ внутритрубной дефектоскопии по указанному выше патенту (RU 2109206 C1). Однако предложенный в этом патенте способ не обладает возможностью передавать текущую информацию о состоянии трубопровода и управлять режимом функционирования дефектоскопа-снаряда по результатам полученной с него информации. Целью изобретения является сокращение времени на получение информации с борта дефектоскопа-снаряда о выявленных дефектах трубопровода на наземной станции для оперативного принятия решений по их устранению путем дистанционного управления дефектоскопом-снарядом для изменения режимов его функционирования, что обеспечит получение более достоверной информации о состоянии трубопровода и существенно расширит его функциональные возможности.
Предлагаемый способ управления двухмодульным дефектоскопом-снарядом при внутритрубной дефектоскопии заключается в управлении дефектоскопом-снарядом по полученной информации о состоянии материала стенок трубы и величинах электрического тока, распределенного в стенках трубы в процессе перемещения дефектоскопа-снаряда по трубопроводу в потоке транспортируемого продукта, привязке к текущим координатам в процессе движения, отличающийся тем, что информация о состоянии трубопровода, в том числе и изображение его внутренней поверхности, получаемая в процессе движения дефектоскопа-снаряда по трубопроводу в потоке транспортируемого продукта-газа в газообразном состоянии, передается с борта дефектоскопа-снаряда по радиосвязи в метровом диапазоне длин волн по трубопроводу на насосные станции, расположенные на трубопроводе, между которыми находится дефектоскоп-снаряд путем возбуждения в трубопроводе электромагнитной волны типа Н11, диапазон рабочих частот радиосвязи определен в пределах 1,25±0,05 относительно критической частоты для этого типа волны в дефектоскопируемом волноводе, обрабатывается на насосных станциях, и по результатам обработки с насосных станций по радиолинии в этом же частотном диапазоне подаются команды на дефектоскоп-снаряд для его управления в процессе перемещения по трубопроводу. Устройство для управления двухмодульным дефектоскопом-снарядом содержит гидросистему возвратно-поступательного перемещения, соединяющую модули, аэродинамический винт, расположенный на одном из модулей, систему управления, систему обработки и регистрации информации, расположенные в модулях, отличающееся тем, что устройство дополнительно снабжено тремя комплектами приемников и передатчиков, первый комплект установлен на начальной насосной станции, в первом комплекте приемника на его выходе установлен и соединен с ним блок обработки информации, на входе первого комплекта передатчика установлен и соединен с ним блок формирования команд управления, а приемник и передатчик соединены с антенным коммутатором, обеспечивающим подключение антенны к приемнику или передатчику, при этом антенна имеет диаграмму направленности, направленную своим максимумом в сторону дефектоскопа-снаряда, второй комплект приемника - передатчика с присоединенными блоками выполнен аналогично первому комплекту и установлен на следующей насосной станции, в сторону которой направлен дефектоскоп-снаряд, а на дефектоскопе-снаряде установлен третий комплект, состоящий из приемника, передатчика, причем приемник и передатчик установлены в одном из модулей дефектоскопа-снаряда, на выходе приемника установлен дешифратор команд управления, последовательно соединенный с приемником и системой управления дефектоскопом-снарядом, а на входе передатчика установлены и последовательно соединены с ним модулятор и локальный коммутатор опроса телеметрируемых параметров, приемник и передатчик соединены с антенным коммутатором, который соединен с двумя линейно-поляризованными антеннами, каждая из которых выполнена из двух вибраторов, расположенных в одной плоскости в торцевой части модулей, при этом антенны установлены между узлами радиального перемещения опорных органов, длина каждого из вибраторов, установленных на первом и втором модулях, составляет 0,25±0,05 рабочей длины волны, расстояние от оснований вибраторов антенны, установленной на втором модуле до основания узлов перемещения опорных органов, находится в пределах 0,15-0,25 рабочей длины волны, длина каждой из лопастей аэродинамического винта выполнена с длиной менее четверти рабочей длины волны, а антенный коммутатор выполнен с возможностью переключения антенн и поочередном подключении к одной из них приемника или передатчика.
На чертеже изображен общий вид устройства управления дефектоскопом-снарядом. Устройство управления дефектоскопом-снарядом, изображенное на чертеже, содержит три комплекта приемников 1, 7, 25 и передатчиков 4, 10, 27 по одному каждого из комплектов, расположенных на начальной, конечной насосных станциях и на дефектоскопе-снаряде, соответственно, при этом начальная и конечная насосные станции содержат блоки обработки информации 2 и 8, соединенные с выходами соответствующих приемников, блоки формирования команд управления 3 и 9, соединенные с входами соответствующих передатчиков, антенные коммутаторы 5 и 11, соединяющие соответствующие приемники и передатчики с антеннами 6 и 12, которые расположены внутри трубопровода. Внутри трубопровода располагается дефектоскоп-снаряд, содержащий два модуля 14 и 18, каждый модуль имеет опорные органы 15 с узлами радиального перемещения опорных органов 16, модули соединены между собой гидросистемой возвратно-поступательного перемещения 21, один из модулей снабжен аэродинамическим винтом 13, длина каждой из лопастей которого выполнена менее четверти рабочей длины волны. Модуль 18 содержит систему управления 23 и систему обработки и регистрации информации 30. В этом модуле установлен приемник 25, на выходе которого установлен и соединен с ним дешифратор команд управления 24, последовательно соединенный с системой управления дефектоскопом-снарядом 23, передатчик 27, на входе которого установлены и последовательно соединены с ним модулятор 28 и локальный коммутатор опроса телеметрируемых параметров 29, который соединен с системой обработки и регистрации информации 30. На модуле 14 установлена линейно-поляризованная антенна, выполненная из двух вибраторов 17, 22, длина каждого из которых составляет 0,25±0,05 рабочей длины волны, а на модуле 18 аналогичная антенна 19, 20, при этом антенны установлены между узлами радиального перемещения опорных органов, расстояние от оснований вибраторов антенны, установленной на втором модуле до основания узлов перемещения опорных органов, находится в пределах 0,15-0,25 рабочей длины волны и антенный коммутатор 26, который выполнен с возможностью переключения антенн и поочередном подключении к одной из них приемника 25 или передатчика 27.
Устройство управления дефектоскопом-снарядом работает следующим образом: на начальном этапе дефектоскоп-снаряд находится в шлюзовой камере. Через шлюзовую камеру дефектоскоп-снаряд вводится в начало контролируемого участка трубопровода, по которому движется транспортируемый продукт-газ в газообразном состоянии, например, газ природный ГОСТ 30319.0-96. В процессе движения по трубопроводу дефектоскоп-снаряд проводит измерения состояния трубопровода, которые поступают в систему обработки и регистрации информации 30, с которой она поступает на локальный коммутатор 29, затем на модулятор 28, с которого поступает на передатчик 27, и через антенный коммутатор 26 излучается вибраторными антеннами 17, 22 или 19, 20 в зависимости от того, к какой насосной станции в данный момент дефектоскоп-снаряд ближе находиться. Необходимость использования на дефектоскопе-снаряде двух комплектов антенн обусловлена экранирующим действием элементов конструкции дефектоскопа-снаряда, которые приводят к снижению уровня сигнала в трубопроводе, поступающего от антенн дефектоскопа-снаряда или принимаемого ими, если он проходит вдоль выступающих элементов конструкции дефектоскопа-снаряда. В то же время эти элементы конструкции выполняют роль рефлектора для находящихся перед ними вибраторов антенн, что приводит к усилению сигнала, идущего от антенны или принимаемого ими в направлении, не затененном элементами конструкции дефектоскопа-снаряда. Кроме того, в связи с большой протяженностью трассы трубопровода между насосными станциями (более 100 км) целесообразно до середины трассы обеспечивать передачу сигнала через антенну, расположенную в хвостовой части движущегося дефектоскопа-снаряда, и принимать сигнал на начальной насосной станции, а на втором участке трассы передавать сигнал через антенну, находящуюся в носовой части дефектоскопа-снаряда, и принимать его на второй насосной станции, которая ближе к дефектоскопу-снаряду. Аналогичны условия передачи команд с насосных станций на дефектоскоп-снаряд. Информация, переданная с дефектоскопа-снаряда, принимается антенной насосной станции, поступает через коммутатор 5 или 11 на приемник 1 или 7, с приемника она поступает на блоки обработки информации 2 или 8 и анализируется для оперативного управления дефектоскопом-снарядом. Команды управления дефектоскопом-снарядом поступают на блок формирования команд управления 3 или 9, соединенный с входом передатчика 4 или 10 и через коммутатор 5 или 11 поступают на антенну 6 или 12 и излучаются в трубопровод. Электромагнитная волна, излученная в трубопровод, принимается антенной 17, 22 или 19, 20, находящейся на стороне дефектоскопа-снаряда, обращенной к наиболее близкой насосной станции, и через антенный коммутатор 26 поступает на приемник 25, на выходе которого установлен дешифратор команд управления 24, команды с которого поступают на систему управления 23 дефектоскопа-снаряда, и дефектоскоп-снаряд в процессе перемещения по трубопроводу переходит в режим работы в соответствии с принятой командой.
В тех случаях, когда нарушения трассы трубопровода или сбой функционирования ближайшей из насосных станций не позволяют обеспечить прием информации с этого направления, то прием информации о состоянии трубопровода, в том числе и изображение его внутренней поверхности, и передача команд управления могут быть осуществлены через другую функционирующую станцию, находящуюся в худших условиях связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И ДВУХМОДУЛЬНЫЙ ДЕФЕКТОСКОП-СНАРЯД | 2014 |
|
RU2562333C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВНУТРИТРУБНЫМ ОБЪЕКТОМ | 2013 |
|
RU2528790C1 |
| УСТРОЙСТВО ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2439520C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644430C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644429C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644431C2 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697008C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2109206C1 |
| СПОСОБ ЭКСТРЕННОЙ ДИАГНОСТИКИ ТРУБОПРОВОДОВ ВЫСОКОГО ДАВЛЕНИЯ | 2010 |
|
RU2442072C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
Способ управления двухмодульным дефектоскопом-снарядом в процессе внутритрубной дефектоскопии и устройство для его осуществления относятся к способам неразрушающего контроля качества магистральных трубопроводов, в частности к способам внутритрубной дефектоскопии с помощью дефектоскопов-снарядов. Способ заключается в дистанционном управлении дефектоскопом-снарядом по результатам приема информации с борта дефектоскопа-снаряда путем радиосвязи в метровом диапазоне длин волн типа Н11 по трубопроводу насосными станциями, расположенными по трассе трубопровода, между которыми находится дефектоскоп-снаряд и при перемещении его по трубопроводу в потоке транспортируемого газа, приводятся данные по допустимому рабочему диапазону длин волн. Устройство управления дефектоскопом-снарядом содержит три комплекта приемно-передающих радиосредств, размещенных по одному комплекту на двух насосных станциях и дефектоскопе-снаряде, которые обеспечивают получение информации с дефектоскопа-снаряда, ее обработку, выработку и передачу команд для управления дефектоскопом-снарядом. Определены требования к размещению антенн и их диаграмм направленности для всех комплектов приемо-передающих устройств. Технический результат - сокращение времени получения информации о состоянии трубопровода и дефектоскопа-снаряда, обеспечение возможности управления дефектоскопом-снарядом в процессе его движения в трубопроводе, расширение функциональных возможностей дефектоскопа-снаряда. 2 н.п. ф-лы, 1 ил.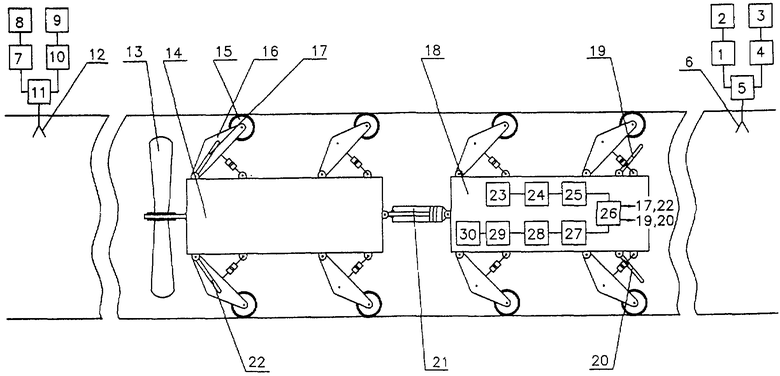
1. Способ управления двухмодульным дефектоскопом-снарядом при внутритрубной дефектоскопии, заключающийся в управлении дефектоскопом-снарядом по полученной информации о состоянии материала стенок трубы и величинах электрического тока, распределенного в стенках трубы в процессе перемещения дефектоскопа-снаряда по трубопроводу в потоке транспортируемого продукта, привязке к текущим координатам в процессе движения, отличающийся тем, что информация о состоянии трубопровода, в том числе и изображение его внутренней поверхности, получаемая в процессе движения дефектоскопа-снаряда по трубопроводу в потоке транспортируемого продукта-газа в газообразном состоянии, передается с борта дефектоскопа-снаряда по радиосвязи в метровом диапазоне длин волн по трубопроводу на насосные станции, расположенные на трубопроводе, между которыми находится дефектоскоп-снаряд путем возбуждения в трубопроводе электромагнитной волны типа Н11, диапазон рабочих частот радиосвязи определен в пределах 1,25±0,05 относительно критической частоты для этого типа волны в дефектоскопируемом волноводе, обрабатывается на насосных станциях, и по результатам обработки с насосных станций по радиолинии в этом же частотном диапазоне подаются команды на дефектоскоп-снаряд для его управления в процессе перемещения по трубопроводу.
2. Устройство для управления двухмодульным дефектоскопом-снарядом, содержащее гидросистему возвратно-поступательного перемещения, соединяющую модули, аэродинамический винт, расположенный на одном из модулей, систему управления, систему обработки и регистрации информации, расположенные в модулях, отличающееся тем, что устройство дополнительно снабжено тремя комплектами приемников и передатчиков, первый комплект установлен на начальной насосной станции, в первом комплекте приемника на его выходе установлен и соединен с ним блок обработки информации, на входе первого комплекта передатчика установлен и соединен с ним блок формирования команд управления, а приемник и передатчик соединены с антенным коммутатором, обеспечивающим подключение антенны к приемнику или передатчику, при этом антенна имеет диаграмму направленности, направленную своим максимумом в сторону дефектоскопа-снаряда, второй комплект приемника - передатчика с присоединенными блоками выполнен аналогично первому комплекту и установлен на следующей насосной станции, в сторону которой направлен дефектоскоп-снаряд, а на дефектоскопе-снаряде установлен третий комплект, состоящий из приемника, передатчика, причем приемник и передатчик установлены в одном из модулей дефектоскопа-снаряда, на выходе приемника установлен дешифратор команд управления, последовательно соединенный с приемником и системой управления дефектоскопом-снарядом, а на входе передатчика установлены и последовательно соединены с ним модулятор и локальный коммутатор опроса телеметрируемых параметров, приемник и передатчик соединены с антенным коммутатором, который соединен с двумя линейно-поляризованными антеннами, каждая из которых выполнена из двух вибраторов, расположенных в одной плоскости в торцевой части модулей, при этом антенны установлены между узлами радиального перемещения опорных органов, длина каждого из вибраторов, установленных на первом и втором модулях, составляет 0,25±0,05 рабочей длины волны, расстояние от оснований вибраторов антенны, установленной на втором модуле до основания узлов перемещения опорных органов, находится в пределах 0,15-0,25 рабочей длины волны, длина каждой из лопастей аэродинамического винта выполнена с длиной менее четверти рабочей длины волны, а антенный коммутатор выполнен с возможностью переключения антенн и поочередном подключении к одной из них приемника или передатчика.
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2109206C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 1993 |
|
RU2069288C1 |
| ОРГАНОМИНЕРАЛЬНОЕ УДОБРЕНИЕ | 2017 |
|
RU2667159C1 |
| US 3539915 А, 10.11.1970. | |||

