Область техники
Изобретение относится к системам контроля и наблюдения за состоянием трубопроводов, более конкретно к устройствам для внутритрубного неразрушающего контроля трубопроводов, главным образом уложенных магистральных нефте-, газо-, продуктопроводов путем пропуска внутри контролируемого трубопровода устройства, состоящего из одного или нескольких транспортных модулей, продвигающихся внутри трубопровода за счет давления потока продукта, транспортируемого по трубопроводу, с установленными на корпусе контрольными датчиками, (чувствительными к каким-либо параметрам, отражающим техническое состояние трубопровода), средствами измерений, обработки и хранения или передачи данных измерений.
Предшествующий уровень техники
В полости трубопроводов, внутри которых пропускают снаряды, могут находиться посторонние предметы. Во время движения внутритрубного снаряда такие посторонние предметы могут разрывать соединительные кабели, находящиеся снаружи корпуса снаряда, в том числе кабели, соединяющие датчики с модулями обработки данных, находящимися в корпусе снаряда.
В снаряде, описанном в US7354348, используется механическая кабельная защита. Однако такая защита слишком громоздка и не может использоваться для защиты кабелей, которые подключены непосредственно к датчикам неразрушающего контроля, поскольку количество таких датчиков слишком велико, а места для размещения механической защиты слишком мало.
В снаряде, описанном в WO2006/021421, используется беспроводная передача данных вдоль полости трубопровода на значительные расстояния вдоль оси трубопровода. Для этого используется мощный передатчик высокочастотных электромагнитных сигналов, установленный в корпусе снаряда, и приемник, антенна которого расположена в полости трубопровода на значительном удалении от снаряда. Данная система предназначена для передачи данных в конечном счете вне трубопровода и не позволяет отказаться от соединительных кабелей между различными модулями электронной системы снаряда.
В снаряде, раскрытом в RU2216686, описана система для передачи данных и приема управляющих сигналов посредством высокочастотных электромагнитных сигналов (более 1 кГц), распространяющихся внутри полости трубопровода и проходящих через радиопрозрачную щель в трубопроводной арматуре. Данная система также предназначена для передачи данных в конечном счете вне трубопровода или для приема управляющих сигналов от наземного передатчика, находящегося над трубопроводом, и не позволяет отказаться от соединительных кабелей между различными модулями электронной системы снаряда.
Сущность изобретения
Настоящее изобретение направлено на создание способа и системы обмена данными и управляющими сигналами для внутритрубного снаряда, позволяющим устранить отмеченные выше недостатки на основе использования беспроводных средств передачи данных и управляющих сигналов, как между внешними относительно снаряда внутритрубными средствами измерения, диагностики и управления и бортовыми средствами обработки и хранения. В результате обеспечивается более высокая эксплуатационная надежность внутритрубного снаряда за счет исключения повреждений соединительных кабелей и нарушений герметичности разъемов соединительных линий при столкновении с препятствиями и, в конечном счете, повышение срока службы оборудования внутритрубного снаряда.
В предложенном изобретении предлагается исключить кабели между датчиками неразрушающего контроля, размещенными вблизи внутренней стенки трубопровода, и модулями обработки и накопления данных, размещаемыми внутри снаряда в герметичной капсуле. Также вместо кабелей предусматривается высокочастотная передача данных и управляющих сигналов между различными модулями электронной системы через внутритрубную среду либо накопление измеренных данных непосредственно в измерительных модулях, расположенных вблизи стенки трубопровода, и передача измеренных данные после пропуска снаряда посредством радиоканала.
Основные варианты применения беспроводной передачи данных согласно изобретению:
- беспроводная передача измеренных данных от датчиков неразрушающего контроля, размещенных вблизи стенки трубопровода, модулям системы обработки данных, размещенным в корпусе снаряда;
- беспроводная передача измеренных данных от датчиков, размещенных в корпусе одной из секций снаряда, модулям обработки данных, размещенным в корпусе другой секции снаряда;
- беспроводная передача управляющих сигналов от бортового управляющего компьютера, размещенного в корпусе одной из секций снаряда, функциональным модулям, удаленным от корпуса этой секции, для управления режимами работы указанных функциональных модулей
- беспроводная передача управляющих сигналов от модуля внешней связи, принимающего управляющие сигналы от наземного передатчика, бортовому управляющему компьютеру или непосредственно функциональным модулям, удаленным от модуля внешней связи, для управления режимами работы электронной системы снаряда и функциональных модулей;
- беспроводная двусторонняя связь между измерительными модулями с управляемым режимом работы, модулями управления и модулями обработки измеренных данных;
- беспроводная передача измеренных данных, накопленных непосредственно в измерительных модулях, на носитель данных внешнего компьютера после завершения пропуска снаряда.
Согласно изобретению снаряд содержит корпус и электронную систему снаряда, содержащую средства беспроводной передачи данных, которые содержат, по меньшей мере, один передатчик электромагнитных сигналов; электронная система снаряда содержит средства измерений и обработки данных измерений, содержащие, по меньшей мере, один измерительный модуль и, по меньшей мере, один модуль обработки данных.
Средства беспроводной передачи данных выполнены способными передавать цифровые данные и содержат средства кодирования передаваемых цифровых данных.
Передатчик электромагнитных сигналов содержит антенну, выполненную в виде элемента печатной платы.
Средства беспроводной передачи данных содержат также, по меньшей мере, один приемник электромагнитных сигналов для приема передаваемых данных, подключенный к модулю обработки данных.
Модуль обработки данных и приемник электромагнитных сигналов размещены в герметичной капсуле, снаружи герметичной капсулы установлена антенна, подключенная к модулю обработки данных, в корпусе герметичной капсулы выполнен электрический разъем, указанная антенна подключена к приемнику электромагнитных сигналов через указанный электрический разъем.
Измерительный модуль механически соединен с герметичной капсулой модуля обработки данных, при этом, по меньшей мере, часть антенны передатчика электромагнитных сигналов находится в прямой видимости, по меньшей мере, части антенны приемника электромагнитных сигналов.
Расстояние между антенной передатчика электромагнитных сигналов и антенной приемника электромагнитных сигналов не превышает величины, равной удвоенному диаметру полости трубопровода, в котором снаряд должен быть пропущен.
В предпочтительном исполнении измерительный модуль содержит, по меньшей мере, один датчик, модуль управления и обработки сигналов датчиков, передатчик электромагнитных сигналов, по меньшей мере, один элемент электропитания, при этом датчик подключен к модулю управления и обработки сигналов датчиков, подключенному также к передатчику электромагнитных сигналов; модуль управления и обработки сигналов датчиков содержит усилитель, аналого-цифровой преобразователь, выход датчика подключен к входу усилителя, выход которого подключен к входу аналого-цифрового преобразователя, выход которого подключен к входу передатчика электромагнитных сигналов.
Элемент электропитания подключен к электронным элементам измерительного модуля и выполнен в виде перезаряжаемого или неперезаряжаемого химического источника питания; передатчик электромагнитных сигналов содержит антенну, установленную также в измерительном модуле; передатчик электромагнитных сигналов содержит микроконтроллер, выполненный способным кодировать сигналы согласно стандартам Wi-Fi или Bluetooth или ZigBee.
Передатчик электромагнитных сигналов размещен в измерительном модуле, все электрические контакты передатчика электромагнитных сигналов и измерительного модуля герметизированы от внутритрубной среды посредством компаунда или эластичных уплотнителей.
Электронная система снаряда содержит также модуль управления и подключенный к нему передатчик управляющих электромагнитных сигналов, а также приемник управляющих электромагнитных сигналов. Модуль управления выполнен способным управлять режимами функционирования элементов снаряда, передатчик управляющих электромагнитных сигналов содержит модуль кодирования управляющих сигналов, приемник управляющих электромагнитных сигналов содержит модуль декодирования управляющих сигналов. Модуль управления содержит программируемую логическую интегральную схему или программируемый контроллер или процессорный модуль или бортовой компьютер.
Электронная система снаряда содержит, по меньшей мере, один функциональный модуль, содержащий модуль управления функциональным модулем, подключенный к приемнику управляющих электромагнитных сигналов.
В дальнейшее развитие изобретения:
Функциональный модуль выполнен в виде:
- измерительного модуля или
- модуля обработки данных или
- модуля передачи данных за пределы трубопровода, или
- модуля передачи и/или приема сигналов для наземного отслеживания положения снаряда в трубопроводе, или
- модуля включения и/или отключения электропитания электронной системы снаряда, или
- модуля управления скоростью и/или ускорением снаряда, или
- модуля управления потоком внутритрубной среды, проходящей из области полости трубопровода, расположенной за снарядом, в область полости трубопровода, расположенной перед снарядом по ходу его движения в трубопроводе, или
- модуля управления кондиционированием среды внутри одной или нескольких газонаполненных герметичных капсул, входящих в состав снаряда.
По меньшей мере, некоторые из датчиков выполнены в виде:
- датчиков неразрушающего контроля, или
- датчиков пройденной дистанции, или
- датчиков скорости снаряда, или
- датчиков ускорения снаряда, или
- датчиков температуры, или
- датчиков давления.
Функциональный модуль в виде измерительного модуля содержит также приемник управляющих электромагнитных сигналов, содержащий модуль декодирования управляющих электромагнитных сигналов; приемник управляющих электромагнитных сигналов подключен к модулю управления и обработки сигналов датчиков, который выполнен способным изменять режим активации и/или опроса датчиков, входящих в состав измерительного модуля.
В одном из вариантов реализации снаряд содержит, по меньшей мере, один измерительный модуль, содержащий датчики неразрушающего контроля в виде ультразвуковых датчиков, модуль управления и обработки сигналов датчиков выполнен способным управлять моментом запуска ультразвукового импульса ультразвуковым датчиком и/или частотой ультразвукового импульса и/или направлением ультразвукового импульса и/или режимом работы ультразвукового датчика излучение/прием и/или временным интервалом, в течение которого ультразвуковой датчик может принимать ультразвуковые импульсы.
В другом варианте реализации снаряд содержит, по меньшей мере, один измерительный модуль, содержащий датчики неразрушающего контроля в виде датчиков магнитного поля и/или датчики геометрии полости трубопровода, а также модуль управления и обработки сигналов датчиков, выполненный способным устанавливать моменты опроса датчиков.
В предпочтительном исполнении, по меньшей мере, один из функциональных модулей, выполненных в виде измерительных модулей пройденной дистанции, содержит одометр и передатчик электромагнитных сигналов, содержащий контроллер, подключенный к выходам счетчика одометрических импульсов, входящего в состав одометра.
В одном из вариантов исполнения снаряд содержит несколько герметичных капсул, модули электронной системы снаряда размещены в указанных герметичных капсулах, по меньшей мере, в одной из капсул установлен передатчик электромагнитных сигналов указанных средств беспроводной передачи данных, по меньшей мере, в одной из других капсул установлен приемник электромагнитных сигналов средств беспроводной передачи данных.
В предпочтительном исполнении, по меньшей мере, один из передатчиков электромагнитных сигналов указанных средств беспроводной передачи данных, установленных в герметичной капсуле, выполнен в виде передатчика управляющих электромагнитных сигналов, по меньшей мере, в одной из других герметичных секций расположен приемник управляющих электромагнитных сигналов.
В корпусе герметичной капсулы, содержащей передатчик электромагнитных сигналов, выполнен электрический разъем, антенна передатчика электромагнитных сигналов подключена к передатчику электромагнитных сигналов через указанный электрический разъем, по меньшей мере, часть антенны передатчика электромагнитных сигналов находится вне указанной герметичной секции.
В развитие изобретения, по меньшей мере, в одной из герметичных капсул размещен измерительный модуль скорости и/или ускорения снаряда, содержащий передатчик электромагнитных сигналов указанных средств беспроводной передачи данных. Модуль обработки данных и приемник электромагнитных сигналов размещены в одной из других герметичных капсул.
В предпочтительном исполнении измерительный модуль скорости и/или ускорения снаряда содержит также приемник управляющих электромагнитных сигналов, а в герметичной секции, содержащей модуль обработки данных, содержится также управляющий модуль и передатчик управляющих электромагнитных сигналов.
Функциональный модуль передачи данных за пределы трубопровода (модуль внешней передачи данных) содержит дополнительный передатчик электромагнитных сигналов (передатчик внешних электромагнитных сигналов).
В одном из возможных исполнений передатчик внешних электромагнитных сигналов выполнен в виде передатчика низкочастотных электромагнитных сигналов.
В другом варианте исполнения передатчик внешних электромагнитных сигналов выполнен в виде передатчика электромагнитных сигналов для передачи сигналов вдоль полости трубопровода приемнику электромагнитных сигналов, расположенному вне корпуса снаряда.
Функциональный модуль передачи и/или приема сигналов для наземного отслеживания положения снаряда в трубопроводе содержит передатчик низкочастотных электромагнитных сигналов.
Функциональный модуль управления потоком внутритрубной среды содержит модуль управления приводом и байпасное устройство, содержащее механические элементы, способные изменять положение и/или ориентацию относительно корпуса снаряда, байпасное устройство выполнено способным изменять величину и/или направление потока внутритрубной среды, проходящей из области полости трубопровода, расположенной за снарядом, в область полости трубопровода, расположенную перед снарядом по ходу его движения в трубопроводе, посредством изменения положения и/или ориентации указанных механических элементов; байпасное устройство содержит также электронно управляемый привод, выполненный способным изменять положение и/или ориентацию указанных механических элементов байпасного устройства, указанный привод подключен к указанному модулю управления приводом.
В одном из вариантов исполнения электронная система снаряда содержит измерительный модуль пройденной дистанции и/или измерительный модуль давления среды и/или измерительный модуль скорости и/или ускорения снаряда, каждый из указанных модулей подключен к модулю обработки данных или передатчику электромагнитных сигналов для передачи указанных сигналов модулю обработки данных. Модуль обработки данных, принимающий данные от измерительного модуля пройденной дистанции и/или измерительного модуля давления среды и/или измерительного модуля скорости и/или ускорения снаряда, подключен к модулю управления приводом или передатчику управляющих сигналов для передачи указанных сигналов модулю управления приводом.
В одном из вариантов исполнения приемник управляющих электромагнитных сигналов подключен к указанному модулю управления приводом.
В предпочтительном исполнении функциональный модуль управления скоростью и/или ускорением снаряда содержит модуль управления потоком внутритрубной среды, а также устройство регулирования силы трения между периферийными элементами корпуса снаряда и внутренней стенкой трубопровода.
Функциональный модуль управления кондиционированием среды внутри одной или нескольких газонаполненных герметичных капсул, входящих в состав снаряда, содержит один или несколько вентиляторов и модуль управления вентиляторами, подключенный к приемнику управляющих электромагнитных сигналов.
В альтернативном варианте реализации электронная система снаряда содержит модуль управления, передатчик управляющих электромагнитных сигналов, по меньшей мере, один измерительный модуль. Модуль управления подключен к передатчику управляющих электромагнитных сигналов, измерительный модуль содержит, по меньшей мере, один датчик, модуль управления и обработки сигналов датчиков, приемник управляющих электромагнитных сигналов, передатчик электромагнитных сигналов; модуль управления и обработки сигналов датчиков содержит накопитель данных и подключен к датчику, приемнику управляющих электромагнитных сигналов и передатчику электромагнитных сигналов.
В предложенном изобретении предлагается передавать данные на небольшие расстояния, сравнимые с размерами снаряда. Это позволяет использовать маломощные передатчики и обеспечить автономное питание измерительных модулей, приемников и передатчиков электромагнитных волн.
Заявленный способ внутритрубного контроля трубопровода характеризуется тем, что пропускают внутри трубопровода внутритрубный снаряд с установленными на нем датчиками и электронной системой снаряда, включающей в себя средства обработки и хранения данных измерений, выполняют измерения физических величин, характеризующих состояние трубопровода, с помощью упомянутых датчиков, преобразуют и сохраняют данные измерений в накопителе данных внутритрубного снаряда в процессе его пропуска, обрабатывают упомянутые данные после выполнения пропуска, при этом упомянутые измеренные данные в процессе пропуска или после его выполнения передают от датчиков к пространственно разделенным от них средствам обработки и хранения данных измерений снаряда по высокочастотному радиоканалу.
Варианты осуществления, описанные выше применительно к функциональным характеристикам заявленного внутритрубного снаряда, также относятся и к заявленному способу, который осуществляется с использованием упомянутого снаряда.
Краткое описание чертежей
Изобретение поясняется далее на примерах осуществления со ссылками на чертежи, на которых показано следующее:
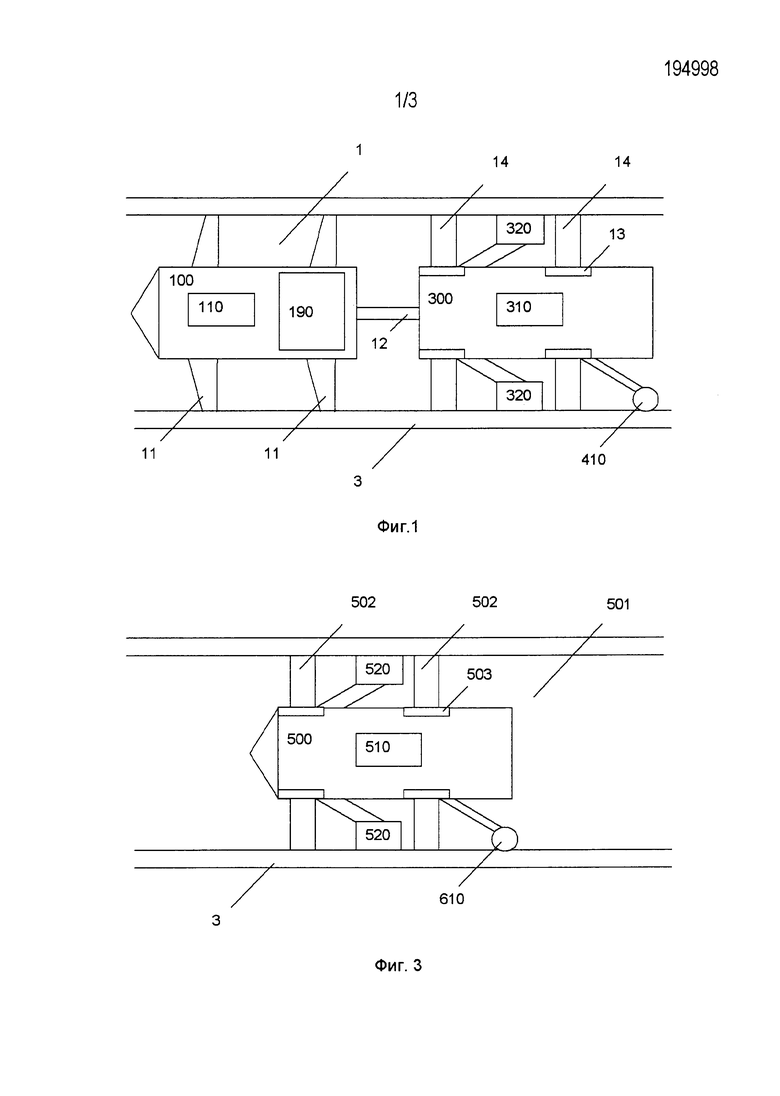
Фиг. 1 - схематичное представление внутритрубного снаряда, выполненного согласно первому варианту осуществления изобретения, размещенного внутри трубопровода;
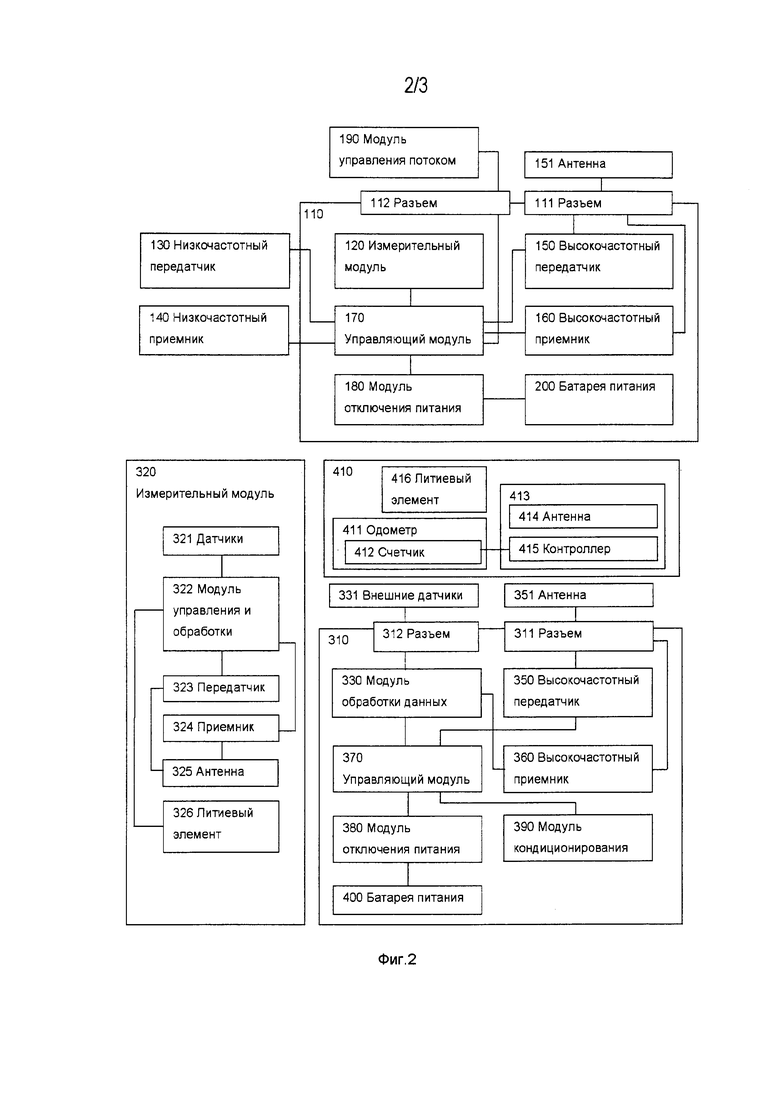
Фиг. 2 - структурная схема электронного оборудования внутритрубного снаряда, выполненного согласно первому варианту осуществления изобретения;
Фиг. 3 - схематичное представление внутритрубного снаряда, выполненного согласно второму варианту осуществления изобретения, размещенного внутри трубопровода;
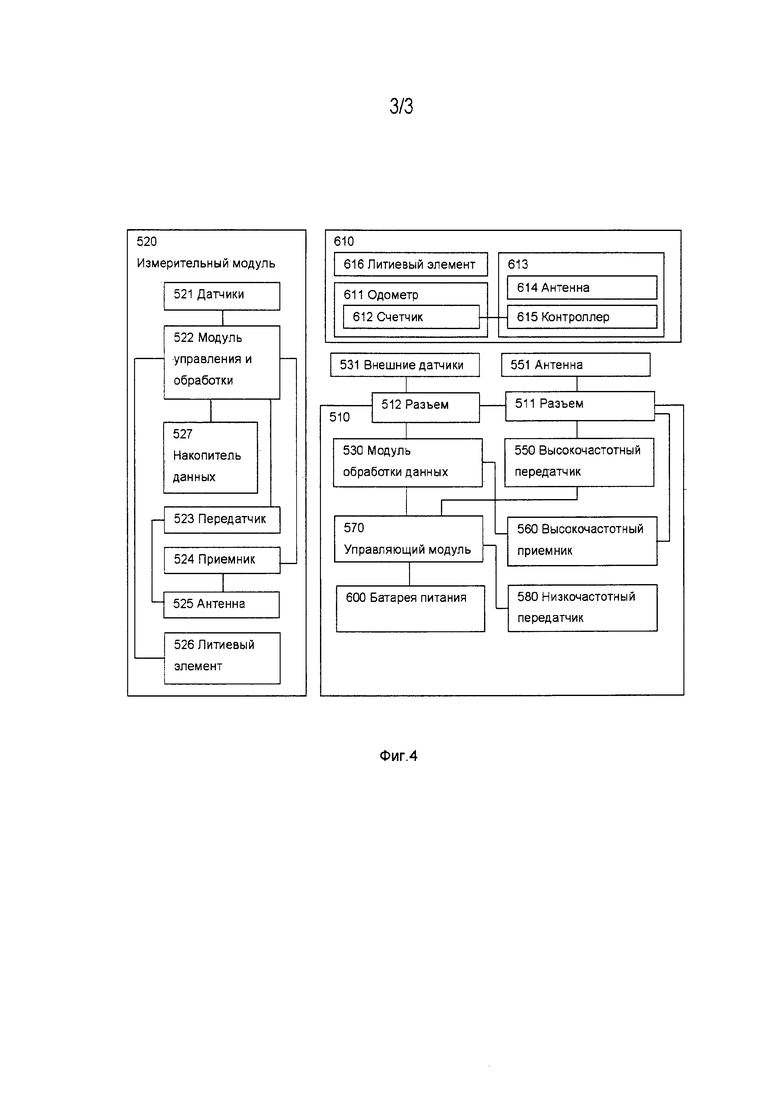
Фиг. 4 - структурная схема электронного оборудования внутритрубного снаряда, выполненного согласно второму варианту осуществления изобретения.
Первый вариант осуществления изобретения
Внутритрубный снаряд, выполненный согласно первому варианту осуществления изобретения, описан ниже со ссылками на фиг 1 и 2. Внутритрубный снаряд 1 (Фиг.1) состоит из нескольких секций 100, 300, соединенных между собой с помощью карданного соединения 12. Внутри первой секции 100 размещена герметичная капсула 110, низкочастотный передатчик 130 (фиг. 2), низкочастотный приемник 140 и модуль управления потоком внутритрубной среды 190, на корпусе первой секции 100 размещены полиуретановые манжеты 11 (фиг. 1), перекрывающие сечение трубопровода 3. Внутри второй секции 300 размещена герметичная капсула 310, а на поверхности второй секции 300 - постоянные магниты 13 с пучками стальных щеток 14, которые обеспечивают прохождение магнитного потока через диагностируемую стенку стального трубопровода и замыкание через стальной корпус второй секции 300. На поверхности второй секции 300 также установлены измерительные модули 320 и измеритель пройденной дистанции 410 (фиг. 2), закрепленные на корпусе секции 300 с помощью пружинящих рычагов (детально не показаны), прижимающих указанные модули к внутренней поверхности трубопровода 3.
Как показано на фиг. 2, внутри капсулы 110 размещен измерительный модуль 120, высокочастотный передатчик 150, высокочастотный приемник 160 управляющих сигналов, управляющий модуль 170, модуль 180 отключения питания, модуль 190 управления потоком внутритрубной среды, батареи 200 питания, например, в виде литиевых элементов. Измерительный модуль 120 включает в себя датчики инерциальной навигации, включающие в себя три ортогональных датчика ускорений и три ортогональных датчика угловых скоростей (на чертежах не показаны).
Снаружи герметичной капсулы 110 установлена антенна 151, подключенная к высокочастотному передатчику 150 и высокочастотному приемнику 160. В альтернативном исполнении могут быть установлены две антенны - одна для передатчика 150, а другая для приемника 160. В корпусе герметичной капсулы 110 выполнен электрический разъем 111, через который антенна 151 подключена к высокочастотному передатчику 150 и высокочастотному приемнику 160.
Измерительный модуль 320 содержит датчики 321, модуль 322 управления и обработки, высокочастотный передатчик 323, высокочастотный приемник 324, литиевый элемент 326 питания, антенну 325, выполненную в виде металлизации печатной платы, на которой размещены также другие электронные элементы измерительного модуля 320.
Внутри герметичной капсулы 310 размещен модуль 330 обработки данных, управляющий модуль 370, высокочастотный передатчик 350, высокочастотный приемник 360, модуль 380 отключения питания, модуль 390 управления кондиционированием, батарея 400 питания. Снаружи герметичной капсулы 310 установлена антенна 351, подключенная к высокочастотному передатчику 350 и высокочастотному приемнику 360. В альтернативном исполнении могут быть установлены две антенны - одна для передатчика 350, а другая для приемника 360. В корпусе герметичной капсулы 310 выполнен электрический разъем 311, через который антенна 351 подключена к передатчику 350 и приемнику 360. Часть антенны 351 находится в прямой видимости антенны 325. Расстояние между антенной 325 и антенной 351 не превышает величины, равной удвоенному диаметру полости трубопровода 3, в котором снаряд 1 должен быть пропущен. Расстояние между антенной 151 и антенной 351 не превышает семикратной величины диаметра полости трубопровода 3, в котором снаряд 1 должен быть пропущен.
В представленном варианте реализации изобретения средства беспроводной передачи данных включают в себя высокочастотные передатчик 150 и приемник 160 в герметичной капсуле 110, высокочастотные передатчик 350 и приемник 360 в герметичной капсуле 310, а также высокочастотные передатчик 323 и приемник 324 в измерительных модулях 320. Средства беспроводной передачи данных выполнены способными передавать цифровые данные и содержат средства кодирования и декодирования передаваемых цифровых данных. Высокочастотные передатчики электромагнитных сигналов 150, 323, 350 содержат микроконтроллер, выполненный с возможностью кодировать сигналы согласно стандарту Bluetooth. Высокочастотные приемники 160, 324, 360 содержат контроллер для декодирования принятых сигналов. Высокочастотные передатчики 150 и 350 выполняют роль также передатчиков управляющих сигналов от управляющих модулей 170 и 370 соответственно.
Датчики 321 измерительного модуля 320 включают в себя датчики неразрушающего контроля. Литиевый элемент электропитания 326 подключен к электронным элементам измерительного модуля 320. Все электрические контакты измерительного модуля 320 герметизированы от внутритрубной среды посредством компаунда, так что компаунд образует корпус измерительного модуля 320. В альтернативном исполнении измерительный модуль 320 может содержать металлический корпус в виде коробки с крышкой, так что электронные элементы измерительного модуля размещаются в корпусе, корпус закрывается крышкой, между крышкой и корпусом размещаются уплотнительные элементы.
Датчики 321 неразрушающего контроля выполнены в виде датчиков магнитного поля, модуль 322 управления и обработки выполнен с возможностью устанавливать моменты опроса датчиков 321 в зависимости от скорости и ускорения снаряда 1. В другом варианте реализации датчики 321 неразрушающего контроля могут быть выполнены в виде ультразвуковых датчиков, модуль 322 управления и обработки выполнен с возможностью управлять моментом запуска ультразвукового импульса ультразвуковым датчиком, частотой ультразвукового импульса и направлением ультразвукового импульса, а также режимом работы ультразвуковых датчиков 321 излучение/прием и интервалом времени, в течение которого ультразвуковые датчики могут принимать ультразвуковые импульсы, отраженные от внутренней и внешней поверхности стенки трубопровода 3.
С внешней стороны герметичной капсулы 310 размещены также внешние датчики 331 в составе магнитных датчиков линейной скорости снаряда, датчика температуры внутритрубной среды и датчика давления внутритрубной среды. Выходы внешних датчиков 331 подключены к модулю 330 обработки данных. При этом каждый из внешних датчиков 331 включает в себя схему оцифровки измеряемых данных, так что на вход модуля 330 обработки данных поступают оцифрованные данные измерений. В альтернативном исполнении могут поступать аналоговые сигналы от внешних датчиков 331 для последующей оцифровки в модуле 330 обработки данных.
Управляющий модуль 370 выполнен с возможностью управлять режимами функционирования элементов снаряда, в том числе режимами функционирования датчиков 321 в измерительном модуле 320, режимами работы низкочастотного приемника 140 и низкочастотного передатчика 130, а также измерительного модуля 120 и модуля 190 управления потоком, размещенным в герметичной капсуле 110. Модуль 322 управления и обработки выполнен на основе программируемой логической интегральной схемы ПЛИС, управляющий модуль 170 содержит программируемый контроллер, а управляющий модуль 370 содержит микропроцессорный модуль на основе компьютерной платы.
Электронная система снаряда 1 содержит несколько функциональных модулей: измерительные модули 120, 320, модуль 330 обработки данных, модуль передачи данных за пределы трубопровода в виде низкочастотного передатчика 130, модуль приема данных из-за пределов трубопровода в виде низкочастотного приемника 140, модуль 370 отключения электропитания электронной системы снаряда, модуль управления скоростью и/или ускорением снаряда путем управления потоком внутритрубной среды, проходящей из области полости трубопровода, расположенной за снарядом, в область полости трубопровода, расположенной перед снарядом по ходу его движения в трубопроводе, в виде модуля 190 управления потоком, модуль управления кондиционированием среды внутри газонаполненной герметичной капсулы 310 в виде модуля 390 кондиционирования. Каждый из функциональных модулей управляется с помощью соответствующего управляющего модуля, подключенного к высокочастотному приемнику электромагнитных сигналов, выполняющего функции приемника управляющих электромагнитных сигналов.
Измерительный модуль 410 пройденной дистанции содержит одометр 411, содержащий счетчик 412 одометрических импульсов, и высокочастотный передатчик 413 электромагнитных сигналов, содержащий антенну 414 и контроллер 415, подключенный к выходам счетчика 412.
В одном варианте осуществления модуль 190 управления потоком внутритрубной среды, подключенный к управляющему модулю 170, содержит байпасное устройство в виде трубки с клапаном и модуль управления приводом. Трубка с клапаном соединяет область перед снарядом с областью за снарядом по ходу его движения. Клапан содержит механические элементы, способные под действием привода изменять положение относительно корпуса снаряда, так что клапан способен изменять величину потока внутритрубной среды, проходящей из области полости трубопровода, расположенной за снарядом, в область полости трубопровода, расположенную перед снарядом по ходу его движения в трубопроводе. Клапан содержит электронно управляемый привод, выполненный способным изменять положение указанных механических элементов клапана и подключенный к указанному модулю управления приводом.
В другом варианте осуществления модуль 190 управления потоком внутритрубной среды может содержать модуль управления приводом и байпасное устройство в виде электронно управляемого привода и двух барабанов с отверстиями, так что перемещение одного из барабанов относительно другого приводит к частичному совмещению отверстий двух барабанов, так что при этом изменяется проходное сечение для среды, соединяющей проходящей из области полости трубопровода, расположенной за снарядом, в область полости трубопровода, расположенную перед снарядом по ходу его движения в трубопроводе. Электронно управляемый привод подключен к модулю управления приводом и способен изменять положение одного барабана относительно другого и таким образом изменять величину и направление потока внутритрубной среды.
При изменении потока внутритрубной среды через снаряд меняется его ускорение и скорость, поэтому модуль 190 управления потоком внутритрубной среды является функциональным модулем управления скоростью и ускорением снаряда. В другом варианте осуществления модуль управления скоростью и ускорением снаряда может дополнительно содержать устройство регулирования силы трения между периферийными элементами корпуса снаряда и внутренней стенкой трубопровода.
Модуль 330 обработки данных, принимающий данные от измерительного модуля 410 пройденной дистанции, внешних датчиков 331, измерительного модуля 120, передает данные управляющему модулю 370, который формирует управляющие сигналы, передаваемые управляющему модулю 170 через высокочастотный передатчик 350 и высокочастотный приемник 160, на основе которых управляющий модуль 170 подает управляющие сигналы на привод модуля 190 управления потоком.
Герметичная капсула 310 заполнена газом, в капсуле размещен функциональный модуль 390 кондиционирования, который содержит вентиляторы и модуль управления вентиляторами, подключенный к управляющему модулю 370.
Устройство согласно первому варианту осуществления работает следующим образом.
Снаряд 1 помещают в камеру запуска и включают перекачку продукта, транспортируемого по трубопроводу 3. Под давлением перекачиваемого продукта снаряд 1 перемещается внутри трубопровода 3. На трассе прокладки трубопровода 3 выбираются контрольные точки на расстоянии от 2 до 5 км одна от другой, в которых должен размещаться регистратор для приема сигналов от снаряда 1. Контрольные точки, как правило, выбираются в местах пересечения трубопровода 3 с дорогами, реками, линиями коммуникаций, в местах изгиба трубопровода 3 и местах установки трубопроводной арматуры. В то время как снаряд 1 движется внутри трубопровода 3, оператор выезжает к месту расположения ближайшей намеченной контрольной точки, размещает регистратор непосредственно вблизи контрольной точки трубопровода 3 и включает регистратор на прием сигналов от низкочастотного передатчика 130 снаряда 1. Регистратор принимает сигналы от передатчика электромагнитных сигналов 130 и записывают в свою память время приема сигнала. После этого оператор перемещается к месту следующей намеченной контрольной точки трубопровода 3, ожидает прихода снаряда 1 и регистрирует момент прохождения снаряда 1 через очередную контрольную точку.
Во время движения снаряда 1 внутри трубопровода 3 модуль 322 управления и обработки периодически опрашивает датчики 321 магнитного поля, сигналы которых обрабатываются в модуле 322 управления и обработки, кодируются согласно стандарту Bluetooth и передаются через высокочастотный передатчик 323 высокочастотному приемнику 360, в котором сигналы принимаются, поступают в модуль 330 обработки данных, декодируются и записываются в накопители данных модуля 330 обработки данных с привязкой ко времени получения указанных данных.
Во время движения снаряда 1 измерительный модуль 120 также периодически опрашивает датчики угловых скоростей и линейных ускорений, сигналы от указанных датчиков обрабатываются в управляющем модуле 170, кодируются согласно стандарту Bluetooth и передаются через высокочастотный передатчик 150 высокочастотному приемнику 360, в котором сигналы принимаются, поступают в модуль 330 обработки данных, декодируются и записываются в накопители данных модуля 330 обработки данных с привязкой ко времени получения указанных данных.
Колесо одометра 411 катится по внутренней поверхности трубопровода 3, так что счетчик 412 генерирует импульсы, количество которых прямо пропорционально дистанции, пройденной колесом одометра 411. Импульсы от счетчика 412 поступают на контроллер 415, который кодирует число, полученное от счетчика 412, путем модуляции электромагнитного сигнала, излучаемого высокочастотным передатчиком 413 в стандарте Bluetooth. Высокочастотный приемник 360 принимает электромагнитные сигналы от высокочастотного передатчика 314 и передает принятые сигналы на модуль 330 обработки данных, в котором сигнал декодируется, и число, соответствующее показаниям счетчика 412, анализируется и записывается в накопитель данных модуля 330 обработки данных с привязкой ко времени записи указанного значения.
Во время движения снаряда 1 управляющий модуль 370 периодически подает управляющие сигналы для высокочастотного приемника 160 в секции 100 снаряда 1. Сигналы кодируются путем модуляции электромагнитного сигнала, излучаемого с помощью высокочастотного передатчика 350. Высокочастотный приемник 160 секции 100 принимает указанный сигнал от высокочастотного передатчика 350 и передает его управляющему модулю 170, который декодирует сигнал и формирует управляющий сигнал, который подается на низкочастотный передатчик 130, который, получив указанный управляющий сигнал, излучает электромагнитные сигналы частотой 22 Гц, которые благодаря низкой частоте проходят сквозь стенку трубопровода и принимаются с помощью регистратора электромагнитных сигналов оператором, находящимся в контрольной точке вблизи трубопровода.
Внешние датчики 331 (датчик температуры и датчик давления внутритрубной среды, а также датчик скорости движения снаряда) периодически опрашиваются по сигналам от модуля 330 обработки данных. Оцифрованные сигналы от датчиков 331 поступают через разъем 312 на модуль 330 обработки данных, в котором они анализируются и записываются в накопитель данных модуля 330 с привязкой ко времени получения соответствующих данных.
В зависимости от результатов анализа показаний датчика температуры среды из числа внешних датчиков 331 с модуля 330 обработки данных на управляющий модуль 370 поступает сигнал управления режимом работы модуля 390 кондиционирования. Также для управления модулем 390 кондиционирования могут использоваться показания датчиков температуры, размещенных в герметичной капсуле 310.
В модуле 330 обработки данных анализируются показания датчиков скорости снаряда из числа внешних датчиков 331, показания одометра 411, а также показания датчиков угловых скоростей и линейных ускорений измерительного модуля 120. Если по результатам анализа скорость снаряда 1 или его ускорение превышает заданный порог, на управляющий модуль 370 подается соответствующий сигнал, получив который управляющий модуль 370 формирует управляющий сигнал для изменения режима работы модуля 190 управления потоком. Указанный сигнал кодируется по стандарту Bluetooth и через высокочастотный передатчик 350 и высокочастотный приемник 160 поступает в управляющий модуль 170, где декодируется. Получив указанный сигнал, управляющий модуль 170 формирует управляющий сигнал, который через разъем 112 подается на модуль управления потоком для увеличения потока внутритрубной среды чрез секцию 100 (через байпасный клапан или посредством изменения относительного положения элементов с отверстиями, регулирующих проходное сечение через секцию 100). При этом снижается разность давлений внутритрубной среды позади секции 100 и перед секцией, и вследствие этого со временем скорость движения снаряда 1 снижается.
Если по результатам анализа в модуле 330 обработки данных скорость снаряда 1 становится ниже заданного нижнего порога, на управляющий модуль 170 подается сигнал, обеспечивающий снижение потока внутритрубной среды через секцию 100, благодаря чему скорость снаряда 1 постепенно увеличивается. Кроме того, если по результатам анализа в модуле 330 обработки данных скорость снаряда 1 существенно меняется, то на управляющий модуль 370 с модуля 330 обработки данных подается сигнал, указывающий на значение изменения скорости движения снаряда 1. При получении такого сигнала в управляющем модуле 370 генерируется управляющий сигнал изменения режима опроса датчиков 321, который кодируется путем модуляции электромагнитного сигнала, излучаемого с помощью высокочастотного передатчика 350. Высокочастотный приемник 324 измерительных модулей 320 принимает указанный сигнал от высокочастотного передатчика 350 и передает его модулю 322 управления и обработки, где сигнал декодируется, и устанавливается периодичность опроса датчиков 321, соответствующая значению, заданному управляющим модулем 370.
Если по результатам анализа в модуле 330 обработки данных снаряд 1 находится в камере приема и избыточное давление в камере приема отсутствует (значение давления внутритрубной среды меньше заданного порога), то с модуля 330 обработки данных на управляющий модуль 370 поступает сигнал конца пропуска снаряда, который формирует управляющий сигнал отключения питания снаряда 1, который подается на модуль 380 отключения питания, который при получении такого сигнала отключает питание электронных модулей, размещенных в капсуле 310.
Питание электронных модулей снаряда 1 может быть также отключено оператором, находящимся вблизи камеры приема, в которой находится снаряд 1. Для этого оператор включает низкочастотный передатчик, находящийся вне трубопровода и подает на низкочастотный приемник 140, находящийся в секции 100, кодированный сигнал, например, сигнал со сдвинутой или изменяющейся частотой, либо прерывающийся сигнал. Получив такой сигнал, через низкочастотный приемник 140, управляющий модуль 170 формирует сигнал отключения питания, который сначала подает на высокочастотный передатчик 150 для передачи управляющего сигнала для модуля 380 отключения питания секции 300, а через заданное время - на модуль 180 отключения питания секции 100. Управляющий сигнал отключения питания, принятый высокочастотным приемником 360, декодируется в модуле 330 обработки данных и поступает через управляющий модуль 370 в модуль отключения питания 380.
После извлечения снаряда из камеры приема с помощью программы, запущенной на ноутбуке, размещенном вблизи снаряда, через канал Bluetooth ноутбука и высокочастотный приемник 360 подают управляющий сигнал модулю 330 обработки данных на перенос данных из его накопителей данных на ноутбук. Модуль 330 обработки данных считывает данные из своих накопителей данных и по каналу Bluetooth через высокочастотный передатчик 350 пересылает данные на ноутбук. Данные, полученные от накопителей данных модуля 330 обработки данных, совмещаются с данными, записанными операторами в регистраторах, а затем анализируются. На основе анализа данных делается заключение о наличии дефектов стенки трубопровода и местоположении обнаруженных дефектов.
Второй вариант осуществления изобретения
Согласно второму варианту осуществления, внутритрубный снаряд 501 содержит секцию 500 снаряда 501 (Фиг.3), в которой размещена герметичная капсула 510, на корпусе секции 500 размещены постоянные магниты 503 с пучками стальных щеток 502, которые перекрывают сечение трубопровода 3 и обеспечивают прохождение магнитного потока через диагностируемую стенку стального трубопровода 3 и замыкание через стальной корпус секции 500. На поверхности секции 500 также установлены измерительные модули 520 и измеритель пройденной дистанции 610, закрепленные на корпусе секции 500 с помощью пружинящих рычагов, прижимающих указанные модули к внутренней поверхности трубопровода 3.
Измерительный модуль 520 содержит датчики 521, модуль 522 управления и обработки, высокочастотный передатчик 523, высокочастотный приемник 524, антенну 525, литиевый элемент 526 питания, накопитель 527 данных. Антенна 525 выполнена в виде металлизации печатной платы, на которой размещены также другие электронные элементы измерительного модуля 520.
Внутри герметичной капсулы 510 размещен модуль 530 обработки данных, управляющий модуль 570, высокочастотный передатчик 550, высокочастотный приемник 560, низкочастотный передатчик 580, батарея 600 питания. Снаружи герметичной капсулы 510 установлена антенна 551, подключенная к высокочастотному передатчику 550 и высокочастотному приемнику 560. В альтернативном исполнении могут быть установлены две антенны - одна для передатчика 550, а другая для приемника 560. В корпусе герметичной капсулы 510 выполнен электрический разъем 511, через который антенна 551 подключена к передатчику 550 и приемнику 560. Часть антенны 551 находится в прямой видимости антенны 525 измерительного модуля 520. Расстояние между антенной 525 и антенной 551 не превышает величины, равной удвоенному диаметру полости трубопровода 3, в котором снаряд 501 должен быть пропущен.
Во втором варианте осуществления средства беспроводной передачи данных включают в себя высокочастотные передатчик 550 и приемник 560 в герметичной капсуле 510, а также высокочастотные передатчик 523 и приемник 524 в измерительных модулях 520. Средства беспроводной передачи данных выполнены с возможностью передачи цифровых данных и содержат средства кодирования и декодирования передаваемых цифровых данных. Высокочастотные передатчики 550, 523 электромагнитных сигналов содержат микроконтроллер, выполненный с возможностью кодировать сигналы согласно стандарту Bluetooth. Высокочастотные приемники 560, 524 содержат контроллер для декодирования принятых сигналов. Высокочастотный передатчик 550 также выполняет роль передатчика управляющих сигналов от управляющего модуля 570.
Датчики 521 измерительного модуля 520 включают в себя датчики неразрушающего контроля. Литиевый элемент 526 электропитания подключен к электронным элементам измерительного модуля 520. Все электрические контакты измерительного модуля 520 герметизированы от внутритрубной среды посредством компаунда, так что компаунд образует корпус измерительного модуля 520. Датчики 521 неразрушающего контроля выполнены в виде датчиков магнитного поля, модуль 522 управления и обработки выполнен с возможностью устанавливать моменты опроса датчиков 521 в зависимости от скорости и ускорения снаряда 501.
С внешней стороны герметичной капсулы 510 размещены внешние датчики 531 в составе магнитных датчиков линейной скорости снаряда, датчика температуры внутритрубной среды и датчика давления внутритрубной среды. Выходы внешних датчиков 531 подключены к модулю 530 обработки данных. При этом каждый из внешних датчиков 531 включает в себя схему оцифровки измеряемых данных, так что на вход модуля 530 обработки данных поступают оцифрованные данные измерений. В альтернативном исполнении могут поступать аналоговые сигналы от внешних датчиков 531 для последующей оцифровки в модуле 530 обработки данных.
Управляющий модуль 570 выполнен с возможностью управлять режимами функционирования элементов снаряда, в том числе режимами функционирования датчиков 521 в измерительном модуле 520, режимами работы низкочастотного передатчика 580, а также измерительного модуля 520. Модуль 522 управления и обработки выполнен на основе программируемой логической интегральной схемы ПЛИС, управляющий модуль 570 содержит микропроцессорный модуль на основе компьютерной платы.
Электронная система снаряда 501 содержит несколько функциональных модулей: измерительные модули 520, модуль 530 обработки данных, модуль передачи данных за пределы трубопровода в виде низкочастотного передатчика 580. Каждый из функциональных модулей управляется с помощью соответствующего управляющего модуля, подключенного к высокочастотному приемнику электромагнитных сигналов, выполняющему функции приемника управляющих электромагнитных сигналов.
Измерительный модуль 610 пройденной дистанции содержит одометр 611, содержащий счетчик 612 одометрических импульсов, литиевый элемент 616 питания, высокочастотный передатчик 613 электромагнитных сигналов, содержащий антенну 614 и контроллер 615, подключенный к выходам счетчика 612.
Модуль 630 обработки данных, принимающий данные от измерительного модуля 610 пройденной дистанции и внешних датчиков 531, передает данные управляющему модулю 570, который формирует управляющие сигналы, передаваемые измерительным модулям 520 через высокочастотный передатчик 550 и высокочастотный приемник 524.
Устройство согласно второму варианту осуществления работает следующим образом.
Снаряд 501 помещают в камеру запуска и включают перекачку продукта, транспортируемого по трубопроводу 3. Под давлением перекачиваемого продукта снаряд 501 перемещается внутри трубопровода 3. На трассе прокладки трубопровода 3 выбираются контрольные точки на расстоянии от 2 до 5 км одна от другой, в которых должен размещаться регистратор для приема сигналов от снаряда 501. Контрольные точки, как правило, выбираются в местах пересечения трубопровода 3 с дорогами, реками, линиями коммуникаций, в местах изгиба трубопровода 3 и местах установки трубопроводной арматуры. В то время как снаряд 501 движется внутри трубопровода 3, оператор выезжает к месту расположения ближайшей намеченной контрольной точки, размещает регистратор непосредственно вблизи контрольной точки трубопровода 3 и включает регистратор на прием сигналов от низкочастотного передатчика 580 снаряда 501. Регистратор принимает сигналы от передатчика 580 и записывают в свою память время приема сигнала. После этого оператор перемещается к месту следующей намеченной контрольной точки трубопровода 3, ожидает прихода снаряда 501 и регистрирует момент прохождения снаряда 501 через очередную контрольную точку.
Во время движения снаряда 501 внутри трубопровода 3 модуль 522 управления и обработки периодически опрашивает датчики 521 магнитного поля, сигналы которых записываются в накопитель 527 данных с привязкой к моменту опроса соответствующего датчика.
Колесо одометра 611 катится по внутренней поверхности трубопровода 3, так что счетчик 612 генерирует импульсы, количество которых прямо пропорционально дистанции, пройденной колесом одометра 611. Импульсы от счетчика 612 поступают на контроллер 615, который кодирует число, полученное от счетчика 612, путем модуляции электромагнитного сигнала, излучаемого высокочастотным передатчиком 613, в стандарте Bluetooth. Высокочастотный приемник 560 принимает электромагнитные сигналы от высокочастотного передатчика 613 и передает принятые сигналы на модуль 530 обработки данных, в котором сигнал декодируется, и число, соответствующее показаниям счетчика 612, анализируется и записывается в накопитель данных модуля 530 обработки данных с привязкой ко времени записи указанного значения.
Если анализ показаний счетчика 612 в модуле 530 обработки данных показывает, что снаряд 501 стоит или движется слишком медленно (скорость изменения показаний счетчика 612 меньше заданного порога), то на управляющий модуль 570 с модуля 530 обработки данных подается сигнал, указывающий на медленное движение снаряда 501. При получении такого сигнала в управляющем модуле 570 генерируется управляющий сигнал изменения режима 521 опроса датчиков, который кодируется путем модуляции электромагнитного сигнала, излучаемого с помощью высокочастотного передатчика 550. Высокочастотный приемник 524 измерительных модулей 520 принимает указанный сигнал от высокочастотного передатчика 550 и передает его модулю 522 управления и обработки, где сигнал декодируется, и устанавливается периодичность опроса датчиков 521, соответствующая значению, заданному управляющим модулем 570.
Во время движения снаряда 501 управляющий модуль 570 периодически подает сигналы на низкочастотный передатчик 580, который излучает электромагнитные сигналы частотой 22 Гц, которые благодаря низкой частоте проходят сквозь стенку трубопровода и принимаются с помощью регистратора электромагнитных сигналов оператором, находящимся в контрольной точке вблизи трубопровода.
Внешние датчики 531 (датчик температуры и датчик давления внутритрубной среды) периодически опрашиваются по сигналам от модуля 530 обработки данных. Оцифрованные сигналы от датчиков 531 поступают через разъемы 512 на модуль 530 обработки данных, в котором они анализируются и записываются в накопитель данных модуля 530 с привязкой ко времени получения соответствующих данных. Если по результатам анализа снаряд находится в камере приема и избыточное давление в камере приема отсутствует (значение давления внутритрубной среды меньше заданного порога), то с модуля 530 обработки данных на управляющий модуль 570 поступает сигнал конца пропуска снаряда. При получении такого сигнала в управляющем модуле 570 генерируется управляющий сигнал отключения питания электронных модулей, размещенных в капсуле 510.
После извлечения снаряда из камеры приема с помощью программы, запущенной на ноутбуке, размещенном вблизи снаряда, через канал Bluetooth ноутбука и высокочастотные приемники 524 измерительных модулей 520 подают управляющие сигналы модулям 522 управления и обработки на перенос данных из накопителей 527 данных на ноутбук. Модуль 522 управления и обработки считывает данные, записанные в накопителе 527 данных, и по каналу Bluetooth через высокочастотный передатчик 523 пересылает данные на ноутбук.
Так же с помощью программы, запущенной на ноутбуке, размещенном вблизи снаряда, через канал Bluetooth ноутбука и высокочастотный приемник 560 в герметичной капсуле 510 подают управляющие сигналы модулю 530 обработки данных на перенос данных из накопителей данных модуля 530 на ноутбук. Управляющий модуль 570 считывает данные, записанные в накопителе данных модуля 530, и по каналу Bluetooth через высокочастотный передатчик 550 пересылает данные на ноутбук.
Данные, полученные от накопителей 527 данных и накопителя данных модуля 530 обработки данных, совмещаются между собой и с данными, записанными операторами в регистраторах, а затем анализируются. На основе анализа данных делается заключение о наличии дефектов стенки трубопровода и местоположении обнаруженных дефектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОТСЛЕЖИВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ВНУТРИТРУБНОГО СНАРЯДА | 2013 |
|
RU2574698C2 |
| СПОСОБ ОБМЕНА ДАННЫМИ И УПРАВЛЕНИЯ ВНУТРИТРУБНЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2216686C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВНУТРИТРУБНЫМ ОБЪЕКТОМ | 2013 |
|
RU2528790C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОЧИСТНЫХ И ДИАГНОСТИЧЕСКИХ ОБЪЕКТОВ В ТРУБОПРОВОДЕ | 2005 |
|
RU2293909C1 |
| СПОСОБ ВЗРЫВОЗАЩИТЫ АППАРАТА ВНУТРИТРУБНОГО КОНТРОЛЯ И УСТРОЙСТВО СИСТЕМЫ ВЗРЫВОЗАЩИТЫ ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2012 |
|
RU2485391C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МАРКИРОВАНИЯ И УПРАВЛЕНИЯ ВНУТРИТРУБНЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2215932C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СОСТОЯНИЯ ВНУТРИТРУБНЫХ ОБЪЕКТОВ | 2002 |
|
RU2204760C1 |
| УСТРОЙСТВО ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2439520C1 |
| СПОСОБ ЭКСТРЕННОЙ ДИАГНОСТИКИ ТРУБОПРОВОДОВ ВЫСОКОГО ДАВЛЕНИЯ | 2010 |
|
RU2442072C1 |
Группа изобретений относится к устройствам для внутритрубного неразрушающего контроля трубопроводов. Техническим результатом является повышение эксплуатационной надежности внутритрубного снаряда на основе использования беспроводных средств передачи данных и управляющих сигналов между внешними относительно снаряда внутритрубными средствами измерения, диагностики и управления и бортовыми средствами обработки и хранения. Внутритрубный снаряд содержит электронную систему снаряда, содержащую средства беспроводной передачи данных, которые содержат по меньшей мере один высокочастотный передатчик электромагнитных сигналов и средства измерений и обработки данных измерений, содержащие по меньшей мере один измерительный модуль и по меньшей мере один модуль обработки данных, причем средства беспроводной передачи данных содержат также по меньшей мере один высокочастотный приемник электромагнитных сигналов для приема передаваемых данных, подключенный к модулю обработки данных. 4 н. и 69 з.п. ф-лы, 4 ил.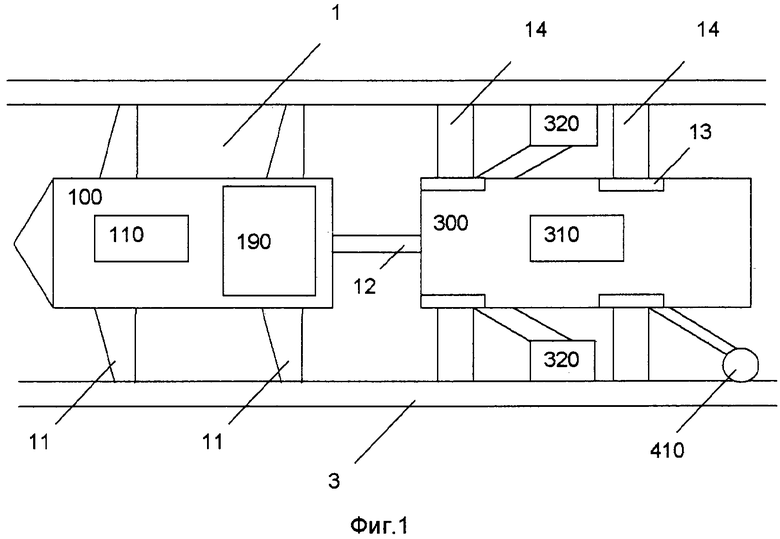
1. Внутритрубный снаряд для обследования трубопровода, содержащий корпус и электронную систему снаряда, содержащую средства беспроводной передачи данных, которые содержат по меньшей мере один высокочастотный передатчик электромагнитных сигналов, средства измерений и обработки данных измерений, содержащие по меньшей мере один измерительный модуль и по меньшей мере один модуль обработки данных, отличающийся тем, что средства беспроводной передачи данных содержат также по меньшей мере один высокочастотный приемник электромагнитных сигналов, подключенный к по меньшей мере одному модулю обработки данных и выполненный с возможностью приема внутри корпуса данных, передаваемых от по меньшей мере одного высокочастотного передатчика электромагнитных сигналов.
2. Внутритрубный снаряд по п. 1, отличающийся тем, что средства беспроводной передачи данных выполнены с возможностью передачи цифровых данных и содержат средства кодирования передаваемых цифровых данных.
3. Внутритрубный снаряд по п. 1, отличающийся тем, что высокочастотный передатчик электромагнитных сигналов содержит антенну, выполненную в виде элемента печатной платы.
4. Внутритрубный снаряд по п. 1, отличающийся тем, что модуль обработки данных и высокочастотный приемник электромагнитных сигналов размещены в герметичной капсуле, снаружи герметичной капсулы установлена антенна, подключенная к модулю обработки данных, в корпусе герметичной капсулы выполнен электрический разъем, при этом упомянутая антенна подключена к высокочастотному приемнику электромагнитных сигналов через упомянутый электрический разъем.
5. Внутритрубный снаряд по п. 4, отличающийся тем, что измерительный модуль механически соединен с герметичной капсулой модуля обработки данных, при этом по меньшей мере часть антенны высокочастотного передатчика электромагнитных сигналов находится в прямой видимости по меньшей мере части антенны высокочастотного приемника электромагнитных сигналов.
6. Внутритрубный снаряд по п. 5, отличающийся тем, что расстояние между антенной высокочастотного передатчика электромагнитных сигналов и антенной высокочастотного приемника электромагнитных сигналов не превышает величины, равной удвоенному диаметру полости трубопровода, в котором должен быть пропущен снаряд.
7. Внутритрубный снаряд по п. 1, отличающийся тем, что измерительный модуль содержит по меньшей мере один датчик, модуль управления и обработки сигналов датчиков, высокочастотный передатчик электромагнитных сигналов и по меньшей мере один элемент электропитания, при этом датчик подключен к модулю управления и обработки сигналов датчиков, подключенному также к высокочастотному передатчику электромагнитных сигналов, модуль управления и обработки сигналов датчиков содержит усилитель, аналого-цифровой преобразователь, выход датчика подключен к входу усилителя, выход которого подключен к входу аналого-цифрового преобразователя, выход которого подключен к входу высокочастотного передатчика электромагнитных сигналов.
8. Внутритрубный снаряд по п. 7, отличающийся тем, что элемент электропитания подключен к электронным элементам измерительного модуля и выполнен в виде перезаряжаемого или неперезаряжаемого химического источника питания, высокочастотный передатчик электромагнитных сигналов содержит антенну, установленную в измерительном модуле, причем высокочастотный передатчик электромагнитных сигналов содержит микроконтроллер, выполненный с возможностью кодирования сигналов согласно стандартам Wi-Fi, или Bluetooth, или ZigBee.
9. Внутритрубный снаряд по п. 7, отличающийся тем, что высокочастотный передатчик электромагнитных сигналов размещен в измерительном модуле, все электрические контакты высокочастотного передатчика электромагнитных сигналов и измерительного модуля герметизированы от внутритрубной среды посредством компаунда или эластичных уплотнителей.
10. Внутритрубный снаряд по п. 1, отличающийся тем, что измерительный модуль содержит по меньшей мере один датчик, выполненный в виде датчика неразрушающего контроля, или датчика пройденной дистанции, или датчика скорости снаряда, или датчика ускорения снаряда, или датчика температуры, или датчика давления.
11. Внутритрубный снаряд по п. 1, отличающийся тем, что электронная система снаряда содержит управляющий модуль и подключенный к нему передатчик управляющих электромагнитных сигналов, а также приемник управляющих электромагнитных сигналов, управляющий модуль выполнен с возможностью управления режимами функционирования элементов снаряда, передатчик управляющих электромагнитных сигналов содержит модуль кодирования управляющих сигналов, приемник управляющих электромагнитных сигналов содержит модуль декодирования управляющих сигналов, управляющий модуль содержит программируемую логическую интегральную схему или программируемый контроллер или процессорный модуль или бортовой компьютер.
12. Внутритрубный снаряд по п. 1, отличающийся тем, что электронная система снаряда содержит по меньшей мере один функциональный модуль, содержащий модуль управления функциональным модулем, подключенный к приемнику управляющих электромагнитных сигналов.
13. Внутритрубный снаряд по п. 12, отличающийся тем, что упомянутый по меньшей мере один функциональный модуль выполнен в виде: измерительного модуля, или модуля обработки данных, или модуля передачи данных за пределы трубопровода, или модуля передачи и/или приема сигналов для наземного отслеживания положения снаряда в трубопроводе, или модуля включения и/или отключения электропитания электронной системы снаряда, или модуля управления скоростью и/или ускорением снаряда, или модуля управления потоком внутритрубной среды, проходящей из области полости трубопровода, расположенной за снарядом, в область полости трубопровода, расположенной перед снарядом по ходу его движения в трубопроводе, или модуля управления кондиционированием среды внутри одной или нескольких газонаполненных герметичных капсул, входящих в состав снаряда.
14. Внутритрубный снаряд по п. 13, отличающийся тем, что функциональный модуль в виде измерительного модуля содержит приемник управляющих электромагнитных сигналов, содержащий модуль декодирования управляющих электромагнитных сигналов, причем приемник управляющих электромагнитных сигналов подключен к модулю управления и обработки сигналов датчиков, который выполнен с возможностью изменения режима активации и/или опроса датчиков, входящих в состав измерительного модуля.
15. Внутритрубный снаряд по п. 7, отличающийся тем, что измерительный модуль содержит датчики неразрушающего контроля в виде ультразвуковых датчиков, модуль управления и обработки сигналов датчиков выполнен с возможностью управлять моментом запуска ультразвукового импульса ультразвуковым датчиком и/или частотой ультразвукового импульса и/или направлением ультразвукового импульса и/или режимом работы ультразвукового датчика излучение/прием и/или временным интервалом, в течение которого ультразвуковой датчик может принимать ультразвуковые импульсы.
16. Внутритрубный снаряд по п. 7, отличающийся тем, что измерительный модуль содержит датчики неразрушающего контроля в виде датчиков магнитного поля и/или датчики геометрии полости трубопровода, при этом модуль управления и обработки сигналов датчиков выполнен с возможностью устанавливать моменты опроса датчиков.
17. Внутритрубный снаряд по п. 12, отличающийся тем, что по меньшей мере один из функциональных модулей выполнен в виде измерительного модуля пройденной дистанции, содержащего одометр и высокочастотный передатчик электромагнитных сигналов, содержащий контроллер, подключенный к выходам счетчика одометрических импульсов, входящего в состав одометра.
18. Внутритрубный снаряд по п. 1, отличающийся тем, что снаряд содержит несколько герметичных капсул, модули электронной системы снаряда размещены в указанных герметичных капсулах, по меньшей мере в одной из капсул установлен высокочастотный передатчик электромагнитных сигналов упомянутых средств беспроводной передачи данных, по меньшей мере в одной из других капсул установлен высокочастотный приемник электромагнитных сигналов упомянутых средств беспроводной передачи данных.
19. Внутритрубный снаряд по п. 18, отличающийся тем, что по меньшей мере один из упомянутых передатчиков электромагнитных сигналов, установленных в герметичной капсуле, выполнен в виде передатчика управляющих электромагнитных сигналов, а по меньшей мере в одной из других герметичных капсул расположен приемник управляющих электромагнитных сигналов.
20. Внутритрубный снаряд по п. 18, отличающийся тем, что в корпусе герметичной капсулы, содержащей упомянутый передатчик электромагнитных сигналов, выполнен электрический разъем, антенна упомянутого передатчика электромагнитных сигналов подключена к передатчику электромагнитных сигналов через упомянутый электрический разъем, и по меньшей мере часть упомянутой антенны передатчика электромагнитных сигналов находится вне упомянутой герметичной капсулы.
21. Внутритрубный снаряд по п. 18, отличающийся тем, что по меньшей мере в одной из герметичных капсул размещен измерительный модуль скорости и/или ускорения снаряда, содержащий упомянутый передатчик электромагнитных сигналов, а модуль обработки данных и приемник электромагнитных сигналов размещены в одной из других герметичных капсул.
22. Внутритрубный снаряд по п. 21, отличающийся тем, что измерительный модуль скорости и/или ускорения снаряда содержит также приемник управляющих электромагнитных сигналов, а в герметичной капсуле, содержащей модуль обработки данных, содержится также управляющий модуль и передатчик управляющих электромагнитных сигналов.
23. Внутритрубный снаряд по п. 13, отличающийся тем, что функциональный модуль передачи данных за пределы трубопровода содержит низкочастотный передатчик электромагнитных сигналов.
24. Внутритрубный снаряд по п. 13, отличающийся тем, что функциональный модуль управления потоком внутритрубной среды содержит модуль управления приводом и байпасное устройство, содержащее механические элементы, способные изменять положение и/или ориентацию относительно корпуса снаряда, при этом байпасное устройство выполнено с возможностью изменения величины и/или направления потока внутритрубной среды, проходящей из области полости трубопровода, расположенной за снарядом, в область полости трубопровода, расположенную перед снарядом по ходу его движения в трубопроводе, посредством изменения положения и/или ориентации упомянутых механических элементов; байпасное устройство содержит также электронно управляемый привод, выполненный с возможностью изменения положения и/или ориентации упомянутых механических элементов байпасного устройства, причем упомянутый привод подключен к упомянутому модулю управления приводом.
25. Внутритрубный снаряд по п. 24, отличающийся тем, что электронная система снаряда содержит измерительный модуль пройденной дистанции и/или измерительный модуль давления среды и/или измерительный модуль скорости и/или ускорения снаряда, причем каждый из упомянутых модулей подключен к модулю обработки данных или передатчику электромагнитных сигналов для передачи сигналов упомянутых модулей в модуль обработки данных, при этом модуль обработки данных, принимающий данные от измерительного модуля пройденной дистанции и/или измерительного модуля давления среды и/или измерительного модуля скорости и/или ускорения снаряда, подключен к модулю управления приводом или передатчику управляющих сигналов для передачи упомянутых сигналов модулю управления приводом.
26. Внутритрубный снаряд по п. 24, отличающийся тем, что приемник управляющих электромагнитных сигналов подключен к упомянутому модулю управления приводом.
27. Внутритрубный снаряд по п. 24, отличающийся тем, что функциональный модуль управления скоростью и/или ускорением снаряда содержит модуль управления потоком внутритрубной среды, а также устройство регулирования силы трения между периферийными элементами корпуса снаряда и внутренней стенкой трубопровода.
28. Внутритрубный снаряд по п. 13, отличающийся тем, что функциональный модуль управления кондиционированием среды внутри одной или нескольких газонаполненных герметичных капсул, входящих в состав снаряда, содержит один или несколько вентиляторов и модуль управления вентиляторами, подключенный к приемнику управляющих электромагнитных сигналов.
29. Способ внутритрубного контроля трубопровода, в котором пропускают внутри трубопровода внутритрубный снаряд с установленными на нем датчиками и электронной системой снаряда, включающей в себя средства обработки и хранения данных измерений, выполняют измерения физических величин, характеризующих состояние трубопровода, с помощью упомянутых датчиков, преобразуют и сохраняют данные измерений в накопителе данных внутритрубного снаряда в процессе его пропуска, обрабатывают упомянутые данные после выполнения пропуска, отличающийся тем, что упомянутые измеренные данные в процессе пропуска или после его выполнения передают от датчиков к пространственно разделенным от них средствам обработки и хранения данных измерений, получающим измеренные данные внутри снаряда, по высокочастотному радиоканалу.
30. Способ по п. 29, отличающийся тем, что упомянутые измеренные данные передают как цифровые кодированные данные.
31. Способ по п. 30, отличающийся тем, что передаваемые данные кодируют согласно стандартам Wi-Fi или Bluetooth или ZigBee.
32. Способ по п. 29, отличающийся тем, что дальность передачи по высокочастотному радиоканалу не превышает величины, равной удвоенному диаметру полости трубопровода, в котором должен быть пропущен снаряд.
33. Способ по п. 29, отличающийся тем, что в качестве датчиков используют датчики из группы, включающей в себя датчик неразрушающего контроля, датчик пройденной дистанции, датчик скорости снаряда, датчик ускорения снаряда, датчик температуры, датчик давления.
34. Способ по п. 29 или 33, отличающийся тем, что с помощью по меньшей мере одного управляющего модуля электронной системы снаряда формируют управляющие сигналы для управления режимами функционирования снаряда, кодируют управляющие сигналы и передают кодированные управляющие электромагнитные сигналы по высокочастотному каналу к пространственно разделенным от упомянутого управляющего модуля функциональным модулям снаряда, принимают кодированные управляющие электромагнитные сигналы по меньшей мере одним функциональным модулем, декодируют принятые кодированные управляющие сигналы и в соответствии с ними изменяют режим функционирования соответствующего функционального модуля.
35. Способ по п. 34, отличающийся тем, что в качестве управляющего модуля используют средства, выбранные из группы, включающей в себя программируемую логическую интегральную схему, программируемый контроллер, процессорный модуль, бортовой компьютер.
36. Способ по п. 34, отличающийся тем, что в качестве функциональных модулей снаряда используют функциональные модули, выбранные из группы, включающей в себя по меньшей мере один измерительный модуль, по меньшей мере один модуль обработки данных, модуль передачи данных за пределы трубопровода, модуль передачи и/или приема сигналов для наземного отслеживания положения снаряда в трубопроводе, по меньшей мере один модуль включения и/или отключения электропитания электронной системы снаряда, модуль управления скоростью и/или ускорением снаряда, модуль управления потоком внутритрубной среды, по меньшей мере один модуль управления кондиционированием среды внутри герметичной капсулы для размещения компонентов электронной системы снаряда.
37. Способ по п. 36, отличающийся тем, что посредством принятых по меньшей мере одним измерительным модулем управляющих электромагнитных сигналов изменяют режим активации и/или опроса датчиков, входящих в состав измерительного модуля.
38. Способ по п. 36, отличающийся тем, что посредством принятых по меньшей мере одним измерительным модулем управляющих электромагнитных сигналов изменяют режим активации и/или опроса датчиков неразрушающего контроля в виде ультразвуковых датчиков, входящих в состав измерительного модуля, при этом управляют моментом запуска ультразвукового импульса ультразвуковым датчиком и/или частотой ультразвукового импульса и/или направлением ультразвукового импульса и/или режимом работы ультразвукового датчика излучение/прием и/или временным интервалом, в течение которого ультразвуковой датчик может принимать ультразвуковые импульсы.
39. Способ по п. 36, отличающийся тем, что посредством принятых по меньшей мере одним измерительным модулем управляющих электромагнитных сигналов устанавливают моменты опроса датчиков неразрушающего контроля в виде датчиков магнитного поля и/или датчиков геометрии полости трубопровода.
40. Способ по п. 36, отличающийся тем, что посредством по меньшей мере одного измерительного модуля измеряют пройденную дистанцию путем подсчета импульсов с выхода счетчика одометрических импульсов, входящего в состав одометра, входящего в состав упомянутого измерительного модуля.
41. Способ по п. 36, отличающийся тем, что осуществляют беспроводную передачу и прием электромагнитных сигналов данных и управляющих электромагнитных сигналов между функциональными модулями снаряда, размещенными в пространственно разнесенных герметичных капсулах, посредством соответствующих антенн, причем по меньшей мере часть соответствующей антенны находится вне упомянутой герметичной капсулы.
42. Способ по п. 41, отличающийся тем, что осуществляют беспроводную передачу электромагнитных сигналов данных от по меньшей мере одного измерительного модуля скорости и/или ускорения снаряда, размещенного в одной из герметичных капсул, к по меньшей мере одному модулю обработки данных, размещенному в одной из других герметичных капсул.
43. Способ по п. 41, отличающийся тем, что осуществляют беспроводную передачу управляющих электромагнитных сигналов от по меньшей мере одного модуля обработки данных, размещенного в упомянутой другой из герметичных капсул, к измерительному модулю скорости и/или ускорения снаряда, размещенному в упомянутой одной из герметичных капсул.
44. Способ по п. 36, отличающийся тем, что с помощью модуля передачи данных за пределы трубопровода осуществляют передачу электромагнитных сигналов низкочастотного диапазона.
45. Способ по п. 36, отличающийся тем, что с помощью модуля управления потоком внутритрубной среды изменяют величину и/или направление потока внутритрубной среды, проходящей из области полости трубопровода, расположенной за снарядом, в область полости трубопровода, расположенной перед снарядом по ходу его движения в трубопроводе, посредством изменения положения и/или ориентации относительно корпуса снаряда механических элементов байпасного устройства с электронно управляемым приводом.
46. Способ по п. 45, отличающийся тем, что в модуле управления приводом формируют управляющие сигналы для электронно управляемого привода на основе электромагнитных сигналов данных, принятых от измерительного модуля пройденной дистанции и/или измерительного модуля давления среды и/или измерительного модуля скорости и/или ускорения снаряда.
47. Способ по п. 36, отличающийся тем, что с помощью модуля управления потоком внутритрубной среды осуществляют управление скоростью и/или ускорением снаряда путем регулирования силы трения между периферийными элементами корпуса снаряда и внутренней стенкой трубопровода.
48. Способ по п. 36, отличающийся тем, что с помощью модуля управления кондиционированием среды внутри упомянутых герметичных капсул осуществляют управление вентиляторами упомянутого модуля посредством датчиков температуры внешней среды или температуры в герметичной капсуле.
49. Внутритрубный снаряд для обследования трубопровода, содержащий корпус и электронную систему снаряда, содержащую средства измерений и обработки данных измерений, содержащие по меньшей мере один модуль обработки данных, а также множество измерительных модулей, соединенных с корпусом снаряда и установленных по периметру вокруг оси снаряда, причем по меньшей мере один упомянутый измерительный модуль содержит по меньшей мере один датчик неразрушающего контроля, а также последовательно подключенные к нему усилитель и аналого-цифровой преобразователь, отличающийся тем, что упомянутый измерительный модуль дополнительно содержит накопитель цифровых данных, высокочастотный передатчик электромагнитных сигналов и контроллер, выполненный с возможностью считывания данных из упомянутого накопителя цифровых данных и передачи с помощью упомянутого высокочастотного передатчика электромагнитных сигналов высокочастотному приемнику, расположенному внутри снаряда или в непосредственной близости от него.
50. Внутритрубный снаряд по п. 49, отличающийся тем, что высокочастотный передатчик электромагнитных сигналов выполнен с возможностью передачи цифровых данных и содержит средства кодирования передаваемых цифровых данных.
51. Внутритрубный снаряд по п. 49, отличающийся тем, что высокочастотный передатчик электромагнитных сигналов содержит антенну, выполненную в виде элемента печатной платы.
52. Внутритрубный снаряд по п. 49, отличающийся тем, что измерительный модуль содержит модуль управления и обработки сигналов датчиков, по меньшей мере один элемент электропитания, при этом по меньшей мере один датчик неразрушающего контроля подключен к модулю управления и обработки сигналов датчиков, подключенному также к высокочастотному передатчику электромагнитных сигналов, модуль управления и обработки сигналов датчиков содержит усилитель, аналого-цифровой преобразователь, выход датчика подключен к входу усилителя, выход которого подключен к входу аналого-цифрового преобразователя, выход которого подключен к входу высокочастотного передатчика электромагнитных сигналов.
53. Внутритрубный снаряд по п. 52, отличающийся тем, что элемент электропитания подключен к электронным элементам измерительного модуля и выполнен в виде перезаряжаемого или неперезаряжаемого химического источника питания, высокочастотный передатчик электромагнитных сигналов содержит антенну, установленную в измерительном модуле, и микроконтроллер, выполненный с возможностью кодирования сигналов согласно стандартам Wi-Fi, или Bluetooth, или ZigBee.
54. Внутритрубный снаряд по п. 53, отличающийся тем, что высокочастотный передатчик электромагнитных сигналов размещен в измерительном модуле, все электрические контакты высокочастотного передатчика электромагнитных сигналов и измерительного модуля герметизированы от внутритрубной среды посредством компаунда или эластичных уплотнителей.
55. Внутритрубный снаряд по п. 49, отличающийся тем, что измерительный модуль содержит по меньшей мере один датчик, выбранный из группы, включающей в себя датчик неразрушающего контроля, датчик пройденной дистанции, датчик скорости снаряда, датчик ускорения снаряда, датчик температуры, датчик давления.
56. Внутритрубный снаряд по п. 49, отличающийся тем, что электронная система снаряда содержит управляющий модуль, к которому подключен передатчик управляющих электромагнитных сигналов, а также приемник управляющих электромагнитных сигналов, управляющий модуль выполнен с возможностью управления режимами функционирования элементов снаряда, передатчик управляющих электромагнитных сигналов содержит модуль кодирования управляющих сигналов, приемник управляющих электромагнитных сигналов содержит модуль декодирования управляющих сигналов, управляющий модуль содержит программируемую логическую интегральную схему или программируемый контроллер или процессорный модуль или бортовой компьютер.
57. Внутритрубный снаряд по п. 49, отличающийся тем, что электронная система снаряда содержит по меньшей мере один функциональный модуль, содержащий модуль управления функциональным модулем, подключенный к приемнику управляющих электромагнитных сигналов.
58. Внутритрубный снаряд по п. 57, отличающийся тем, что упомянутый по меньшей мере один функциональный модуль выполнен в виде: измерительного модуля, или модуля обработки данных, или модуля передачи данных за пределы трубопровода, или модуля включения и/или отключения электропитания электронной системы снаряда, или модуля управления скоростью и/или ускорением снаряда.
59. Внутритрубный снаряд по п. 58, отличающийся тем, что функциональный модуль в виде измерительного модуля содержит приемник управляющих электромагнитных сигналов, содержащий модуль декодирования управляющих электромагнитных сигналов, причем приемник управляющих электромагнитных сигналов подключен к модулю управления и обработки сигналов датчиков, который выполнен с возможностью изменения режима активации и/или опроса датчиков, входящих в состав измерительного модуля.
60. Внутритрубный снаряд по п. 58, отличающийся тем, что измерительный модуль содержит датчики неразрушающего контроля в виде ультразвуковых датчиков, модуль управления и обработки сигналов датчиков выполнен с возможностью управлять моментом запуска ультразвукового импульса ультразвуковым датчиком и/или частотой ультразвукового импульса и/или направлением ультразвукового импульса и/или режимом работы ультразвукового датчика излучение/прием и/или временным интервалом, в течение которого ультразвуковой датчик может принимать ультразвуковые импульсы.
61. Внутритрубный снаряд по п. 58, отличающийся тем, что измерительный модуль содержит датчики неразрушающего контроля в виде датчиков магнитного поля и/или датчики геометрии полости трубопровода, при этом модуль управления и обработки сигналов датчиков выполнен с возможностью устанавливать моменты опроса датчиков.
62. Внутритрубный снаряд по п. 58, отличающийся тем, что по меньшей мере один из функциональных модулей выполнен в виде измерительного модуля пройденной дистанции, содержащего одометр и передатчик электромагнитных сигналов, содержащий контроллер, подключенный к выходам счетчика одометрических импульсов, входящего в состав одометра.
63. Внутритрубный снаряд по п. 58, отличающийся тем, что функциональный модуль передачи данных за пределы трубопровода содержит низкочастотный передатчик электромагнитных сигналов.
64. Способ внутритрубного контроля трубопровода, в котором пропускают внутри трубопровода внутритрубный снаряд с установленными на нем датчиками и электронной системой снаряда, включающей в себя средства обработки и хранения данных измерений, выполняют измерения физических величин, характеризующих состояние трубопровода, с помощью упомянутых датчиков, преобразуют и сохраняют данные измерений в процессе пропуска снаряда и обрабатывают упомянутые данные после выполнения пропуска, упомянутое преобразование и сохранение выполняют путем аналого-цифрового преобразования измеренных данных и сохранения преобразованных цифровых данных в по меньшей мере одном накопителе цифровых данных электронной системы снаряда, отличающийся тем, что в процессе пропуска снаряда оцифрованные данные сохраняют в накопителях данных, размещенных в измерительных модулях, содержащих упомянутые датчики, после завершения пропуска снаряда считывают данные, сохраненные в упомянутых накопителях данных, и переносят в накопитель данных, размещенный внутри снаряда или в непосредственной близости от него.
65. Способ по п. 64, отличающийся тем, что в процессе пропуска снаряда данные сохраняют в измерительных модулях, содержащих также высокочастотные передатчики и контроллеры электронной системы снаряда, выполненные с возможностью управления сохранением и считыванием данных из накопителей данных измерительных модулей; и данные, сохраненные в упомянутых накопителях данных, переносят в накопитель данных, размещенный внутри снаряда или в непосредственной близости от него, по радиочастотному каналу с помощью упомянутых высокочастотных передатчиков.
66. Способ по п. 64, отличающийся тем, что в процессе пропуска снаряда данные сохраняют в измерительных модулях, содержащих также высокочастотные приемники, с помощью которых принимают управляющие сигналы, указывающие на необходимость передачи считывания и передачи данных, сохраненных в накопителях данных измерительных модулей; и передают упомянутые управляющие сигналы упомянутым контроллерам измерительных модулей для выполнения считывания указанных данных, кодирования и передачи с помощью высокочастотных передатчиков.
67. Способ по п. 64, отличающийся тем, что передаваемые данные кодируют согласно стандартам Wi-Fi, или Bluetooth, или ZigBee.
68. Способ по п. 64, отличающийся тем, что в качестве датчиков используют датчики из группы, включающей в себя датчик неразрушающего контроля, датчик пройденной дистанции, датчик скорости снаряда, датчик ускорения снаряда, датчик температуры, датчик давления.
69. Способ по п. 64 или 68, отличающийся тем, что с помощью по меньшей мере одного управляющего модуля электронной системы снаряда формируют управляющие сигналы для управления режимами функционирования снаряда, кодируют управляющие сигналы и передают кодированные управляющие электромагнитные сигналы по высокочастотному каналу к пространственно разделенным от упомянутого управляющего модуля функциональным модулям снаряда, принимают кодированные управляющие электромагнитные сигналы по меньшей мере одним функциональным модулем, декодируют принятые кодированные управляющие сигналы и в соответствии с ними изменяют режим функционирования соответствующего функционального модуля.
70. Способ по п. 69, отличающийся тем, что в качестве функциональных модулей снаряда используют функциональные модули, выбранные из группы, включающей в себя по меньшей мере один измерительный модуль, по меньшей мере один модуль обработки данных, модуль передачи данных за пределы трубопровода, по меньшей мере один модуль включения и/или отключения электропитания электронной системы снаряда, модуль управления скоростью и/или ускорением снаряда.
71. Способ по п. 70, отличающийся тем, что посредством принятых по меньшей мере одним измерительным модулем управляющих электромагнитных сигналов изменяют режим активации и/или опроса датчиков, входящих в состав измерительного модуля.
72. Способ по п. 70, отличающийся тем, что посредством принятых измерительным модулем управляющих электромагнитных сигналов изменяют режим записи/считывания данных из накопителя данных измерительного модуля.
73. Способ по п. 70, отличающийся тем, что с помощью модуля передачи данных за пределы трубопровода осуществляют передачу электромагнитных сигналов низкочастотного диапазона.
| СПОСОБ ОБМЕНА ДАННЫМИ И УПРАВЛЕНИЯ ВНУТРИТРУБНЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2216686C1 |
| УСТРОЙСТВО ДЛЯ ВНУТРИТРУБНОЙ УЛЬТРАЗВУКОВОЙ ТОЛЩИНОМЕТРИИ | 2001 |
|
RU2188413C1 |
| US 0004884449 A1, 05.12.1989 | |||
| Основы технической диагностики трубопроводных систем нефти и газа: Учебник для вузов/А.М.Шаммазов и др | |||
| - СПб.: Недра, 2009 | |||
| СПОСОБ ПОЛУЧЕНИЯ ТВЕРДЫХ ПРОДУКТОВ УПЛОТНЕНИЯ ФОРМАЛЬДЕГИДА С ФЕНОЛАМИ И ДРУГИМИ ВЕЩЕСТВАМИ | 1925 |
|
SU512A1 |
| Устройство для нахождения генерирующих точек контактного детектора | 1923 |
|
SU472A1 |

