Предлагаемое изобретение относится к электротехнике, а именно к автономным системам электропитания (СЭП) космических аппаратов (КА), использующим в качестве первичных источников энергии батареи фотоэлектрические (БФ), а в качестве накопителей энергии - аккумуляторные батареи (АБ).
В СЭП осуществляют непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного (напряжение БФ) и выходного напряжений СЭП. При этом зарядные устройства (ЗУ) обеспечивают заряд АБ, а стабилизатор напряжения (СН) и разрядные устройства (РУ) обеспечивают питание бортовой аппаратуры (БА). В зависимости от степени заряженности АБ производят запрет или разрешение работы ЗУ и РУ.
Известен способ управления автономной системой электропитания космического аппарата (Система электропитания изделия 46КС, Техническое описание, ГНПРКЦ «ЦСКБ-Прогресс», г.Самара, 2002 г., аналог), содержащей солнечную батарею, стабилизатор напряжения (СН), включенный между БФ и нагрузкой, n аккумуляторных батарей, например пять, и по n (по числу АБ) зарядных (ЗУ) и разрядных (РУ) устройств, а также для каждой АБ - устройства контроля заряда аккумуляторной батареи (УКЗАБ).
Данный способ отличается простотой логики автономного управления, но не позволяет обеспечить питание БА в нештатных ситуациях, связанных несанкционированным изменением ориентации БФ на Солнце и, как следствие, нарушением энергобаланса СЭП.
Известен способ управления автономной системой электропитания КА (Патент РФ на изобретение №2168828, кл. H02J 7/36, опубл. 10.06.2001, бюл. №16, прототип), заключающийся в управлении стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контроле степени заряженности аккумуляторных батарей; запрете на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при снижении уровня заряженности; запрете на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при повышении уровня заряженности данной аккумуляторной батареи; запрете работы всех разрядных устройств и прекращении управления разрядными устройствами при аварийном разряде аккумуляторных батарей в случае потери ориентации батареи фотоэлектрической на Солнце; снятии запрета работы всех разрядных устройств и возобновлении управления разрядными устройствами по сигналам об уровне заряженности, при заряде аккумуляторных батарей до некоторого значения емкости.
В случае нештатного изменения ориентации БФ КА на Солнце происходит нарушение энергобаланса в СЭП. При разряде любой АБ до минимального уровня заряд этой АБ прекращают. Если после запрета работы некоторых РУ мощности оставшихся в работе АБ и РУ окажется недостаточно для обеспечения питания бортовой аппаратуры, запрещают работу CM и всех к этому времени работающих РУ, а также прекращают управление РУ по сигналам УКЗБ. Питание бортовой аппаратуры после этого прекращается.
После восстановления ориентации БФ КА на Солнце сначала производят заряд аккумуляторных батарей до некоторого значения суммарной емкости, а затем разрешают работу СН и РУ заряженных АБ, разрешают управление РУ по сигналам УКЗАБ.
Питание БА возобновляется от СН или от РУ в зависимости от соотношения мощности нагрузки и мощности, генерируемой БФ.
Такой способ управления обеспечивает длительную штатную работу СЭП. Кроме того, он обеспечивает сохранение работоспособности СЭП при нештатных или аварийных ситуациях на КА.
Однако этот способ недостаточно эффективен, так как не использует всех возможностей СЭП и КА в целом для прекращения или сдерживания процесса развития аварийной ситуации; не обеспечивает надежного функционирования аппаратуры СЭП при выходе из аварийной ситуации после восстановления ориентации БФ, не обеспечивает возможности контроля СЭП при выходе из аварийной ситуации.
Недостаточная эффективность управления СЭП связана с тем, что при нарушении ориентации БФ на Солнце запрещают работу всех РУ и СН, если после запрета работы некоторого числа РУ разряженных до минимального уровня АБ мощности оставшихся в работе АБ и РУ окажется недостаточно для обеспечения питания бортовых потребителей. Питание БА после этого прекратится. Следовательно, выключение СЭП производят при наличии некоторых АБ, не разряженных до минимального уровня, когда есть возможность еще определенное время питать нагрузку и продолжать работы по спасению КА. Кроме того, не обеспечивается возможность использования средств бортового комплекса управления (БКУ) космического аппарата для прекращения или сдерживания процесса развития аварийной ситуации - нет адаптивного изменения схемы питания бортовой аппаратуры в зависимости от текущего состояния энергетических возможностей СЭП.
Недостаточная надежность функционирования СЭП, а также невозможность контроля ее параметров, связана с тем, что при выходе из аварийной ситуации сначала производят заряд аккумуляторных батарей до некоторого значения суммарной емкости, а затем разрешают работу СН и РУ, то есть аккумуляторные батареи заряжаются при отсутствии питания бортовых потребителей. Значит не работают системы терморегулирования, телеметрии и БКУ, а значит не обеспечиваются необходимые температурные режимы зарядных устройств и аккумуляторных батарей, нет возможности контроля параметров СЭП, нет информации о том, что СЭП работает в данном режиме.
Задачей предлагаемого изобретения является повышение живучести КА в аварийных режимах его работы, максимальное использование запасенной емкости АБ и обеспечение питанием бортового комплекса управления для прекращения или сдерживания процесса развития аварийной ситуации, а также недопущение необратимого разряда АБ в случае нарушения энергобаланса.
Указанная задача решается тем, что в способе управления автономной системой электропитания, содержащей солнечную батарею и n аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, и по n зарядных и разрядных устройств, заключающемся в управлении стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы; контроле степени заряженности аккумуляторных батарей; запрете на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при снижении уровня заряженности; запрете на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при повышении уровня заряженности данной аккумуляторной батареи; запрете работы всех разрядных устройств и прекращении управления разрядными устройствами при аварийном разряде аккумуляторных батарей в случае потери ориентации БФ на Солнце; снятии запрета работы всех разрядных устройств и возобновлении управления разрядными устройствами по сигналам об уровне заряженности, при заряде аккумуляторных батарей до некоторого значения емкости контролируют выходное напряжение системы с помощью порогового датчика; при аварийном разряде нескольких m(m≤n) аккумуляторных батарей до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры и запоминают его; при аварийном разряде всех n работающих аккумуляторных батарей до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае если после запоминания управляющего сигнала выходное напряжение системы электропитания снижается до заданного порогового значения, запрещают работу всех разрядных устройств и прекращают управление разрядными устройствами по сигналам об уровне заряженности; после восстановления ориентации батареи фотоэлектрической на Солнце производят питание оставшейся включенной части бортовой аппаратуры от батареи фотоэлектрической через стабилизатор напряжения; сброс запоминания управляющего сигнала производят по внешней разовой команде (РК).
Пример функциональной схемы СЭП, в которой реализуется предлагаемый способ, приведен на чертеже, где обозначено:
1 - батарея фотоэлектрическая (БФ);
2 - стабилизатор напряжения (СН);
31…3n - зарядные устройства (ЗУ);
41…4n - разрядные устройства (РУ);
51…5n - аккумуляторные батареи (АБ);
61…6n - устройства контроля степени заряженности АБ (УКЗАБ);
ОС - вход обратной связи;
3 - вход запрета работы;
7 - нагрузка СЭП (бортовая аппаратура);
8 - пороговый датчик минимального напряжения;
9 - логический элемент m из n;
10 - логический элемент И;
11, 121…12n, 131…13n, 141…14n - R-S триггеры;
15 - логический элемент И;
161…16n, 171…17n - логические элементы ИЛИ.
Способ управления автономной системой электропитания космического аппарата осуществляют следующим образом.
В СЭП осуществляется непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного (напряжение БФ) и выходного напряжений СЭП. При этом зарядные устройства обеспечивают заряд АБ, а СН и РУ обеспечивают питание БА. Цепи непрерывного управления (обратной связи - ОС) ЗУ подключены к шине БФ, а цепи непрерывного управления (ОС) СН и РУ подключены к выходной шине СЭП (на вход БА).
В зависимости от степени заряженности АБ производится запрет или разрешение работы ЗУ и РУ. При достижении максимальной степени заряженности конкретной АБ сигнал с выхода "Запрет ЗУ" ее устройства контроля степени заряженности АБ (61…6n на чертеже) с помощью R-S триггера (121…12n) запрещает работу ее ЗУ. После разряда АБ до некоторого заданного уровня этот запрет снимают сигналом с выхода "Разрешение ЗУ" УКЗБ.
При достижении минимального уровня заряженности конкретной АБ сигнал с выхода "Запрет РУ" ее УКЗАБ (61…6n на чертеже), проходя через R-S триггер (141…14n) и логический элемент ИЛИ (171…17n), поступает на вход запрета работы соответствующего РУ. Эта АБ переводится в режим хранения. После заряда данной АБ до некоторого заданного уровня этот запрет снимают сигналом с выхода "Разрешение РУ" УКЗАБ (логические элементы ИЛИ 161…16n, R-S триггеры 141…14n, логические элементы ИЛИ 171…17n).
В случае нештатной ориентации солнечных батарей КА на Солнце происходит нарушение энергобаланса в СЭП. Сигналы с выходов "Запрет РУ" всех УКЗАБ поступают на входы логических элементов 9 (m из n) и 10 (логический элемент И).
При аварийном разряде нескольких m(m≤n) аккумуляторных батарей до минимального уровня заряженности на выходе логического элемента 9 формируется управляющий сигнал аварийной нагрузки («АН»), который выдается в бортовой комплекс управления для отключения части бортовой аппаратуры. Этот сигнал запоминается на R-S триггере 11. Запоминание снимается по внешней разовой команде (РК). При отключении БКУ части БА снижается скорость расходования энергии аккумуляторных батарей. Остается подключенной часть бортовой нагрузки - приборы системы терморегулирования, систем телеметрии и других необходимых систем. Эти приборы обеспечивают температурные режимы и контроль параметров БА. Появляется возможность более длительное время питать нагрузку и продолжать работы по выводу КА из нештатной ситуации. Таким образом, обеспечивается возможность использования средств бортового комплекса управления для адаптивного изменения схемы питания бортовой аппаратуры в зависимости от текущего состояния энергетических возможностей СЭП.
При аварийном разряде всех n работающих аккумуляторных батарей до минимального уровня заряженности на выходе логического элемента 10 появляется сигнал, который, проходя через логические элементы ИЛИ 161…16n, R-S триггеры 141…14n, логические элементы ИЛИ 171…17n, снимает запрет на работу всех разрядных устройств. Далее, если аварийная ситуация продолжается, происходит синхронный разряд на оставшуюся часть нагрузки всех АБ. Имеющаяся емкость АБ используется полностью.
При дальнейшем аварийном разряде выходное напряжение системы снижается до заданного порогового значения, срабатывает пороговый датчик минимального напряжения 8, а поскольку этому предшествовало запоминание управляющего сигнала «АН» на R-S триггере 11, то его сигнал, пройдя через логический элемент И 15 и R-S триггеры (131…13n) и логические элементы ИЛИ (171…17n), запрещает работу всех разрядных устройств и логическим уровнем на входах элементов ИЛИ (171…17n) блокирует прохождение управляющих сигналов, разрешающих работу разрядным устройствам по сигналам об уровне заряженности от УКЗАБ 61…6n. Запоминание управляющего сигнала «АН» обеспечивает защиту от обесточивания БА при ложном срабатывании порогового датчика минимального напряжения 8, или при его срабатывании в случае перегрузки по выходным шинам СЭП, не связанной с нарушением ориентации БФ и аварийным разрядом АБ.
После восстановления ориентации БФ на Солнце производят питание оставшейся включенной части БА от БФ через стабилизатор напряжения. Напряжение на выходе СЭП, обеспечиваемое СН, определяется соотношением мощности нагрузки, подключенной к выходным шинам СЭП, и мощности, генерируемой БФ и определяемой степенью ее освещенности. Напряжение БФ и, следовательно, напряжение бортовой аппаратуры могут произвольно меняться в течение неопределенного времени, до полного восстановления ориентации, в пределах от 0 до номинального значения. Включенные приборы, естественно, при этом должны сохранять свою работоспособность. Избыток мощности БФ идет на заряд АБ.
Поскольку цепи непрерывного управления (обратной связи - ОС) ЗУ подключены к шине БФ, а цепи непрерывного управления (ОС) СН подключены к выходной шине СЭП, в первую очередь будет обеспечиваться питание БА, то есть включенные приборы системы терморегулирования, систем телеметрии, и других необходимых систем, которые обеспечат необходимые температурные режимы зарядных устройств и аккумуляторных батарей, а также контроль параметров.
При нарушении ориентации БФ на Солнце или уходе КА в тень питание всей БА и заряд АБ прекращаются. Разряд АБ не производится, так как сигнал «Запрет заряда» не снят.
При заряде какой-либо из аккумуляторных батарей до некоторого значения емкости сигнал с выхода УКЗБ «АБ заряжена», пройдя через R-S триггер (131…13n) и логический элемент ИЛИ (171…17n), снимает запрет на работу своего разрядного устройства и блокировку прохождения управляющих сигналов, разрешающих работу разрядным устройствам по сигналам об уровне заряженности от УКЗАБ 61…6n. СЭП переходит в штатный режим работы после заряда всех АБ или по РК.
Таким образом, применение предлагаемого способа управления системы управления КА позволит максимально использовать запасенную емкость АБ и обеспечить питание бортового комплекса управления для прекращения или сдерживания процесса развития аварийной ситуации, а также не допустить необратимого разряда АБ в случае нарушения энергобаланса. При этом повышается живучесть космического аппарата в аварийных режимах его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2593760C9 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2572396C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2537389C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2593599C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2018 |
|
RU2692301C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2675590C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА С БОЛЬШИМ СРОКОМ АКТИВНОГО СУЩЕСТВОВАНИЯ | 2016 |
|
RU2633997C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2016 |
|
RU2636384C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2682725C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2621694C9 |
Способ управления автономной системой электропитания космического аппарата относится к электротехнике, а именно к автономным системам электропитания (СЭП) космических аппаратов (КА), использующим в качестве первичных источников энергии батареи фотоэлектрические (БФ), а в качестве накопителей энергии - аккумуляторные батареи (АБ). Технический результат - повышение живучести КА в аварийных режимах его работы, максимальное использование запасенной емкости АБ и обеспечение питанием бортового комплекса управления для прекращения или сдерживания процесса развития аварийной ситуации, а также недопущение необратимого разряда АБ в случае нарушения энергобаланса. Способ управления автономной системой электропитания, содержащей солнечную батарею и n аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, и по n зарядных и разрядных устройств, заключается в управлении стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы; контроле степени заряженности аккумуляторных батарей; запрете на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при снижении уровня заряженности; запрете на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при повышении уровня заряженности данной аккумуляторной батареи; запрете работы всех разрядных устройств и прекращении управления разрядными устройствами при аварийном разряде аккумуляторных батарей в случае потери ориентации БФ на Солнце; снятии запрета работы всех разрядных устройств и возобновлении управления разрядными устройствами по сигналам об уровне заряженности. При заряде аккумуляторных батарей до некоторого значения емкости контролируют выходное напряжение системы с помощью порогового датчика; при аварийном разряде нескольких m(m≤n) аккумуляторных батарей до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры и запоминают его; при аварийном разряде всех n работающих аккумуляторных батарей до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае, если после запоминания управляющего сигнала выходное напряжение системы электропитания снижается до заданного порогового значения, запрещают работу всех разрядных устройств и прекращают управление разрядными устройствами по сигналам об уровне заряженности; после восстановления ориентации батареи фотоэлектрической на Солнце производят питание оставшейся включенной части бортовой аппаратуры от батареи фотоэлектрической через стабилизатор напряжения; сброс запоминания управляющего сигнала производят по внешней разовой команде (РК). 1 ил.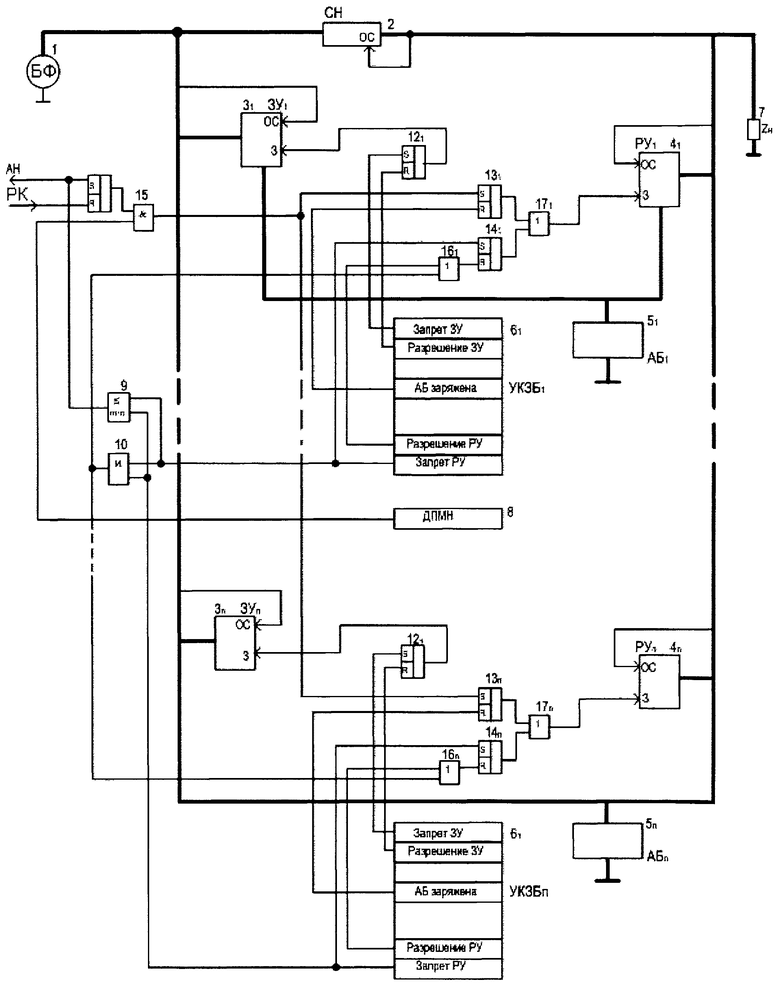
Способ управления автономной системой электропитания космического аппарата, содержащей солнечную фотоэлектрическую батарею и n аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжения системы электропитания; контролируют степень заряженности аккумуляторных батарей; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при повышении уровня заряженности данной аккумуляторной батареи; вводят запрет работы всех разрядных устройств и прекращают управление разрядными устройствами при аварийном разряде аккумуляторных батарей в случае потери ориентации батареи фотоэлектрической на Солнце; снимают запрет работы всех разрядных устройств и возобновляют управление разрядными устройствами по сигналам об уровне заряженности при заряде аккумуляторных батарей до некоторого значения емкости, отличающийся тем, что контролируют выходное напряжение системы электропитания с помощью порогового датчика; при аварийном разряде нескольких m(m≤n) аккумуляторных батарей до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры и запоминают его; при аварийном разряде всех n работающих аккумуляторных батарей до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае если после запоминания управляющего сигнала выходное напряжение системы снижается до заданного порогового значения, запрещают работу всех разрядных устройств и прекращают управление разрядными устройствами по сигналам об уровне заряженности; после восстановления ориентации батареи фотоэлектрической на Солнце производят питание оставшейся включенной части бортовой нагрузки от батареи фотоэлектрической через стабилизатор напряжения; сброс запоминания управляющего сигнала производят после заряда всех аккумуляторных батарей по внешней разовой команде.
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ | 1999 |
|
RU2168828C1 |
| СПОСОБ ПИТАНИЯ НАГРУЗКИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ И АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2397594C2 |
| RU 2059988, 10.05.1996 | |||
| Коросниматель роторного окорочного станка | 1987 |
|
SU1519873A1 |
| US 2010264656 A1, 21.10.2010. | |||

