ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к металлодетекторам, конкретно к использованию металлодетекторов для магнитно-резонансной визуализации.
УРОВЕНЬ ТЕХНИКИ ПО ИЗОБРЕТЕНИЮ
Магнитно-резонансная визуализация (MRI) обеспечивает прекрасные клинические изображения и уникальные признаки для медицинской диагностики. Для MRI существенно иметь высокие магнитные поля в трех разных частотных диапазонах, конкретно, однородное поле на нулевой частоте (B0-поле), градиентное поле на акустических частотах и радиочастотное (RF) поле (B1-поле) вокруг FM радиочастоты (60-300 МГц).
Имплантаты, такие как интрамедуллярные фиксаторы, искусственные суставы или кардиостимуляторы, обычно изготавливаются из металла с высокой проводимостью, в котором возбуждается вихревой ток внутри MRI сканера. Поскольку этот эффект пропорционален частоте, B1-поле играет главную роль в вопросах взаимосвязи, относящихся к имплантатам пациентов внутри MRI системы.
На сегодня пациенты с имплантатами часто не могут подвергаться сканированию MRI системой по соображениям исключения опасности, которая вызывается в основном RF вихревым током, наводимым локальным SAR. В настоящее время параллельные передающие системы способны формировать RF поле таким образом, что эти вихревые токи исключаются. Я. Эрьямен (Y. Eryaman) и др. в статье “Reduction of Implant RF Heating Through Modification of Transmit Coil Electric Field”, Magnetic Resonance in Medicine (ʺМагнитный резонанс в медицинеʺ) 65:1305-1313, 2011, описывают использование передающего поля с линейной вместо круговой поляризацией, которое реализует плоскость с отсутствием электрического поля в позиции имплантата.
Такой технический подход предложен в основном для случая, когда взаимосвязь с имплантатом определяется преимущественно электрическими полями, то есть если имплантат ведет себя подобно электрическому диполю. Этот случай особенно применим к кардиостимулятору. Однако это не помогает применительно к большим проводящим структурам. Но существует также тенденция перехода к локальным передающим решеткам вместо использования катушки для всего тела. Если имплантат располагается не слишком близко к области визуализации, то возбуждение может быть просто исключено отказом от использования элементов, близких к имплантату. Поэтому целесообразно определить местоположение имплантата перед сканированием. Международная заявка WO2013/024449 относится к ослаблению RF передающего поля магнитно-резонансной системы обследования в месте расположения электрически проводящего объекта. Это место расположения находится из предварительных данных магнитного резонанса. Кроме того, система визуализации магнитных частиц для обнаружения наночастиц металла известна из международной заявки WO2014/071196.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение представляет металлодетектор, систему магнитно-резонансной визуализации и компьютерный программный продукт в независимых пунктах формулы изобретения.
Как будет понятно специалистам в данной области техники, аспекты настоящего изобретения могут быть реализованы в виде аппарата, способа или компьютерного программного продукта. В соответствии с этим аспекты настоящего изобретения могут принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включающего в себя программно-аппаратное обеспечение, резидентное программное обеспечение, микрокод, и т.п.) или варианта осуществления, сочетающего программное обеспечение и аппаратное обеспечение, который может именоваться здесь как ʺсхемаʺ, ʺмодульʺ или ʺсистемаʺ. Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, реализованного в одном или более компьютерно-читаемых носителях информации, имеющих выполняемый компьютером код, реализованный в них.
Может быть использовано любое сочетание одного или более компьютерно-читаемых носителей информации. Компьютерно-читаемый носитель информации может быть носителем сигналов или запоминающим носителем информации. Термин ʺкомпьютерно-читаемый запоминающий носитель информацииʺ, как он используется здесь, охватывает любой материальный носитель информации, способный запоминать команды, которые исполняются процессором или вычислительным устройством. Компьютерно-читаемый запоминающий носитель информации может быть компьютерно-читаемым запоминающим энергонезависимым носителем информации. Компьютерно-читаемый запоминающий носитель информации может быть также вещественным компьютерно-читаемым носителем информации. В некоторых вариантах осуществления компьютерно-читаемый запоминающий носитель информации может быть также способен к запоминанию данных, к которым может иметь доступ процессор или вычислительное устройство. Примеры компьютерно-читаемых запоминающих носителей информации включают в себя, не ограничиваясь этим, гибкий диск, накопитель на жестком магнитном диске, твердотельный жесткий диск, флэш-память, USB флэш-накопитель, оперативную память (RAM), постоянную память (ROM), оптический диск, магнитно-оптический диск и регистровый файл процессора. Примеры оптических дисков включают в себя компакт-диск (CD) и универсальный цифровой диск (DVD), например, CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R диски. Компьютерно-читаемый запоминающий носитель информации также относится к различным типам носителей записи, к которым может быть осуществлен доступ компьютерным устройством через сеть или линию связи. Например, данные могут извлекаться через модем, через Интернет или через локальную сеть. Выполняемый компьютером код, реализованный в компьютерно-читаемом носителе, может передаваться, используя любое подходящее средство, включая сюда, но не ограничиваясь этим, беспроводную связь, проводную линию, оптоволоконный кабель, RF, и т.п., или любое подходящее сочетание вышеперечисленного.
Компьютерно-читаемый носитель сигналов может включать в себя распространяемый сигнал данных с выполняемым компьютером кодом, реализованным в нем, например, в основной полосе частот или как части несущей волны. Такой распространяемый сигнал может принимать любую из множества форм, включая сюда, но не ограничиваясь этим, электромагнитную, оптическую или любое их сочетание. Компьютерно-читаемый носитель сигналов может быть любым компьютерно-читаемым носителем, который не является компьютерно-читаемым запоминающим носителем информации и который может сообщать, распространять или транспортировать программу для использования системой исполнения команд, аппаратом или устройством, или же в соединении с ними.
ʺПамять компьютераʺ или ʺпамятьʺ является примером компьютерно-читаемого запоминающего носителя информации. Память компьютера является любой памятью, которая непосредственно доступна для процессора. ʺЗапоминающее устройство компьютераʺ или ʺзапоминающее устройствоʺ является другим примером компьютерно-читаемого запоминающего носителя информации. Запоминающее устройство компьютера является любым энергонезависимым компьютерно-читаемым запоминающим носителем информации. В некоторых вариантах осуществления запоминающее устройство компьютера может быть также памятью компьютера, или наоборот.
ʺПроцессорʺ, как он используется здесь, означает электронный компонент, который способен выполнять программу или же исполняемую машиной команду или выполняемый компьютером код. Ссылка на компьютерное устройство, содержащее ʺпроцессорʺ, должна пониматься как возможное содержание более одного процессора или обрабатывающего ядра. Процессор может быть, например, многоядерным процессором. Процессор может также пониматься как группа процессоров внутри одной компьютерной системы или как распределенный среди многих компьютерных систем. Термин ʺкомпьютерное устройствоʺ следует также понимать как относящийся к группе или сети компьютерных устройств, каждая из которых содержит процессор или процессоры. Выполняемый компьютером код может выполняться многими процессорами, которые могут находится внутри одного и того же компьютерного устройства или которые могут быть даже распределены по многим компьютерным устройствам.
Выполняемый компьютером код может содержать исполняемые машиной команды или программу, которые побуждают процессор выполнять аспект настоящего изобретения. Выполняемый компьютером код для выполнения операций применительно к аспектам настоящего изобретения может быть записан в любом сочетании одного или более языков программирования, включая сюда объектно-ориентированный язык программирования, такой как Java, Smalltalk, C++ или другой подобный, и общеупотребимые процедурные языки программирования, такие как ʺCʺ язык программирования или подобные языки программирования, и компилированные в исполняемые машиной команды. В некоторых случаях выполняемый компьютером код может быть в форме языка высокого уровня или в скомпилированной форме и быть использован в сочетании с интерпретатором, который генерирует исполняемые машиной команды в процессе работы.
Выполняемый компьютером код может выполняться полностью на компьютере пользователя, частично на компьютере пользователя как автономный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или же полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть подсоединен к компьютеру пользователя через любой тип сети, включая сюда локальную сеть (LAN) или региональную сеть (WAN), или же соединение может быть выполнено к внешнему компьютеру (например, через Интернет, используя провайдера услуг Интернет).
Аспекты настоящего изобретения описаны со ссылкой на представленные блок-схемы последовательности операций и/или блок-схемы способов, аппаратов (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления настоящего изобретения. Должно быть понятно, что каждый блок или участок блоков на блок-схемах последовательности операций, чертежах и/или блок-схемах может быть реализован командами компьютерной программы в форме выполняемого компьютером кода, когда это применимо. Должно быть также понятно, что, когда они взаимно не исключаются, сочетания блоков в разных блок-схемах последовательности операций, на чертежах и/или в блок-схемах может быть допустимо. Эти команды компьютерной программы могут подаваться в процессор компьютера общего назначения, специального компьютера или другого программируемого аппарата обработки данных для формирования машины, с тем чтобы команды, которые исполняются через процессор компьютера или другого программируемого аппарата обработки данных, создавали средство для реализации функций/действий, определенных в блоке или блоках блок-схемы последовательности операций или блок-схемы.
Эти команды компьютерной программы могут также запоминаться в компьютерно-читаемом носителе информации, который может направлять компьютер, другой программируемый аппарат обработки данных или другие устройства на функционирование конкретным образом, с тем чтобы команды, хранимые в компьютерно-читаемом носителе информации, создавали готовый продукт, включая сюда команды, которые реализуют функцию/действие, определенные в блоке или блоках блок-схемы последовательности операций или блок-схемы.
Команды компьютерной программы могут быть также загружены в компьютер, другой программируемый аппарат обработки данных или другое устройство, чтобы вызвать набор необязательных этапов, которые должны выполняться на компьютере, другом программируемом аппарате или на других устройствах, чтобы сформировать реализуемый компьютером процесс, с тем чтобы команды, которые исполняются на компьютере или другом программируемом аппарате, обеспечивали процессы для реализации функций/действий, определенных в блоке или блоках блок-схемы последовательности операций или блок-схемы.
ʺПользовательский интерфейсʺ, как он используется здесь, относится к интерфейсу, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. ʺПользовательский интерфейсʺ может также относиться к человеко-машинному интерфейсу. Пользовательский интерфейс может предоставлять информацию или данные оператору и/ли принимать информацию или данные от оператора. Пользовательский интерфейс может обеспечивать, чтобы ввод от оператора был принят компьютером, и может обеспечивать вывод пользователю от компьютера. Другими словами, пользовательский интерфейс может позволить оператору управлять или манипулировать компьютером, и этот интерфейс может позволить компьютеру указывать результаты производимого оператором управления или манипулирования. Отображение данных или информации на дисплее или графическом пользовательском интерфейсе является примером предоставления информации оператору. Прием данных с помощью клавиатуры, мыши, шарового манипулятора, сенсорной панели, ручки координатно-указательного устройства, планшета графического ввода, джойстика, геймпада, веб-камеры, гарнитуры, ручки переключения скорости, штурвала управления, педалей, управляющих перчаток, танцевального коврика, дистанционного управления и акселерометра - все это представляет примеры компонентов пользовательского интерфейса, которые способны обеспечить прием информации или данных от оператора.
ʺАппаратный интерфейсʺ, как он используется здесь, означает интерфейс, который позволяет процессору компьютерной системы взаимодействовать и/или управлять внешним вычислительным устройством и/или аппаратом. Аппаратный интерфейс может позволить процессору посылать сигналы управления или команды во внешнее вычислительное устройство и/или аппарат. Аппаратный интерфейс может также позволить процессору обмениваться данными с внешним вычислительным устройством и/или аппаратом. Примеры аппаратного интерфейса включают в себя, не ограничиваясь этим, универсальную последовательную шину, IEEE 1394 порт, параллельный порт, IEEE 1284 порт, последовательный порт, RS-232 порт, IEEE-488 порт, Bluetooth соединение, соединение по беспроводной локальной сети, TCP/IP соединение, Ethernet соединение, интерфейс с регулировкой напряжения, MIDI интерфейс, интерфейс с аналоговым входом и интерфейс с цифровым входом.
ʺДисплейʺ или ʺустройство отображенияʺ, как они используются здесь, означают выходное устройство или пользовательский интерфейс для воспроизведения изображений или данных. Дисплей может выводить визуальные, звуковые или тактильные данные. Примеры дисплея включают в себя, не ограничиваясь этим, компьютерный монитор, телевизионный экран, сенсорный экран, тактильный электронный дисплей, брайлевский экран, электроннолучевую трубку (CRT), запоминающую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, плоскопанельный дисплей, вакуумный флуоресцентный (VF) дисплей, светодиодный (LED) дисплей, электролюминесцентный дисплей (ELD), плазменные дисплейные панели (PDP), жидкокристаллический дисплей (LCD), дисплей на органических светодиодах (OLED), проекционный аппарат и шлем-дисплей.
Данные магнитного резонанса (MR) определяются здесь как регистрируемые результаты измерений радиочастотных сигналов, излучаемых спинами атомов через антенну аппарата магнитного резонанса во время сканирования для получения изображений с помощью магнитного резонанса. Данные магнитного резонанса являются примером данных медицинского изображения. Изображение от магнитно-резонансной визуализации (MRI) определяется здесь как реконструкция двухмерной или трехмерной визуализации анатомических данных, содержащихся внутри данных магнитно-резонансной визуализации. Такая визуализация может осуществляться с использованием компьютера.
В одном аспекте изобретение представляет металлодетектор, содержащий набор катушек, который содержит по меньшей мере первую катушку для генерации первого магнитного поля вдоль первого направления внутри зоны измерений. Первая катушка является первой разделенной катушкой. Первая катушка содержит первый участок катушки и второй участок катушки. Участки катушки предпочтительно выровнены с их осями катушки, идущими вдоль общей оси. Оси катушек могут иметь совместный компонент вдоль общей оси. Первый участок катушки и второй участок катушки могут быть подсоединены к раздельным источникам электропитания. Если электрический ток подается через участки катушки в противоположных направлениях, а обмотки участков катушки намотаны с одинаковой ориентацией, то они будут генерировать магнитные поля с противоположными полярностями, но в одном и том же направлении. Линии поля параллельны первому направлению вдоль общей оси участков катушки. Альтернативно обмотки участков катушки могут быть намотаны в противоположных ориентациях, а электрические токи подаваться в них с одной и той же полярностью, тогда они будут генерировать магнитные поля с противоположными полярностями, но вдоль одного и того же направления вдоль общей оси. Если имеются дополнительные катушки, каждая из которых выполнена из нескольких, например, двух участков катушки, то линии поля, которое они создают, будут параллельны второму или третьему направлениям.
Например, катушки могут быть катушками с цилиндрической обмоткой, и вдоль цилиндрической оси симметрии катушки линии поля выравниваются с направлением катушки. Если используются градиентные катушки для системы магнитно-резонансной визуализации, тогда катушка проектируется для создания градиента магнитного поля в конкретном направлении. Если катушка разделяется, магнитные поля, создаваемые половинами градиентных катушек, по-прежнему ориентируется в одном и том же направлении, но поля могут создаваться с противоположными полярностями.
Металлодетектор дополнительно содержит источник питания катушек для раздельной подачи изменяющегося во времени электропитания на набор катушек. Источник питания выполнен с возможностью раздельной подачи изменяющегося во времени электропитания по меньшей мере на первый участок катушки и второй участок катушки. Металлодетектор дополнительно содержит по меньшей мере один электрический датчик для измерения электрических данных из зоны измерений. Измеренные электрические данные представляют отклик в ответ на перемещение зоны ослабленного поля. Измеренные данные могут представлять эклектическое напряжение, поданное по меньшей мере на первый участок катушки и на второй участок катушки, для генерации изменяющегося во времени магнитного поля с перемещающейся зоной ослабленного поля. При этом измеренные электрические данные представляют электромагнитную нагрузку первого и второго участков катушки, изменяющуюся вследствие перемещения зоны ослабленного поля. Это может быть реализовано таким образом, что электрический ток заданной сила подается в соответствующие участки катушки и измеряется напряжение на первом и втором участках катушки. Другой способ реализации заключается в приложении заданных уровней электрического напряжения к соответствующим участкам катушки и измерении электрического тока в первом и втором участках катушки. Еще в одном варианте осуществления измеренные электрические данные представляют отклик вследствие вихревых токов, вызываемых перемещением зоны ослабленного поля. Альтернативно мощность и фаза от первого и второго участков катушки могут измеряться для извлечения изменения нагрузки. Это может быть сделано наделением системы считывающих катушек двухмерным или трехмерным профилями чувствительности. Такая считывающая катушка снабжена двумя или тремя витками катушки в разных, предпочтительно ортогональных, ориентациях.
Когда на соответствующие участки катушки подаются электрические токи таким образом, что участки катушки генерируют магнитные поля противоположной полярности, возникает свободная от поля точка, точное положение которой зависит как от геометрии обмоток катушки, так и от полярности и силы электрических токов, подаваемых в них. Вокруг свободной от поля точки образуется зона ослабленного поля, в которой существует некоторая напряженность магнитного поля, но она значительно слабее, чем напряженность магнитного поля на большом расстоянии от свободной от поля точки, например, максимальная напряженность поля, создаваемая одним из участков катушки в местоположении, в котором она крайне незначительно компенсируется полем от других участков катушки. Детальная форма зоны ослабленного поля определяется геометрией обмоток катушки и электрическими токами, подаваемыми в них.
Металлодетектор дополнительно содержит память, содержащую исполняемые машиной команды и шаблон поиска металлического объекта. Шаблон поиска металлического объекта содержит команды источника питания для управления источником питания с целью подачи независимо изменяющегося во времени электропитания на набор катушек. Команды источника питания дополнительно побуждают источник питания подавать независимо изменяющееся во времени электропитание на первый участок катушки и второй участок катушки, чтобы создать зону ослабленного поля внутри зоны измерений. Например, полярность напряжения, подаваемого на два участка катушки, может изменяться на обратную таким образом, чтобы в пространстве между двумя катушками существовала зона ослабленного поля. Зона ослабленного поля имеет изменяющуюся во времени составляющую магнитного поля с величиной или максимальной величиной ниже заданной напряженности магнитного поля. Шаблон поиска металлического объекта дополнительно побуждает источник питания изменять ток, подаваемый в набор катушек, чтобы перемещать зону ослабленного поля в заданном шаблоне внутри зоны визуализации.
Другими словами, шаблон поиска металлического объекта содержит команды, которые вызывают подачу изменяющегося во времени электропитания на оба участка катушки таким образом, что между ними образуется зона ослабленного поля. Команды шаблона поиска металлического объекта регулируют фазу и/или амплитуду изменяющегося во времени электропитания, подаваемого на набор катушек, таким образом, что зона ослабленного поля следует за заданным шаблоном.
Металлодетектор дополнительно содержит процессор для управления работой и функциями металлодетектора. Исполнение команд побуждает процессор управлять источником питания, используя шаблон поиска металлического объекта, для перемещения зоны ослабленного поля внутри или через заданный шаблон. Исполнение команд дополнительно побуждает процессор измерять электрическим датчиком электрические данные во время перемещения зоны ослабленного поля в заданном шаблоне. Исполнение команд дополнительно побуждает процессор определять местоположение по меньшей мере одного металлического объекта внутри зоны визуализации обнаружением изменения в электрических данных, когда зона ослабленного поля перемещается в заданном шаблоне.
Изменяющееся во времени магнитное поле, которое создается подачей изменяющегося во времени электропитания на набор катушек, приводит в результате к наведению вихревых токов внутри металлического объекта. Если металлический объект находится внутри зоны ослабленного поля, то вихревые токи в металлическом объекте будут уменьшены по сравнению с тем, когда это условие не выполняется. Эффект наведения бόльших или меньших электрических токов в металлическом объекте может быть отмечен проведением измерений электрическим датчиком. Варианты осуществления могут поэтому иметь возможность определения пространственного положения металлического объекта.
В некоторых примерах электропитание или ток подается на различные катушки из набора катушек, используя синусоидальную форму колебаний.
В других примерах изменяющееся во времени электропитание имеет частоту. Частота обычно находится в диапазоне от нескольких килогерц до нескольких сотен килогерц.
В некоторых примерах может быть более чем один электрический датчик. Например, может быть один датчик или много датчиков для каждой катушки из набора катушек.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор модифицировать заданный шаблон в процессе работы после обнаружения по меньшей мере одного металлического объекта во время перемещения зоны ослабленного поля в заданном шаблоне. Например, если обнаруживается металлический объект, то местоположение, в котором был обнаружен металлический объект, может побудить процессор заново определить или изменить шаблон таким образом, чтобы это местоположение, в котором был обнаружен металлический объект, отыскивалось более детально. Это может быть сделано использованием несколько усложненного алгоритма или может быть сделано достаточно просто. Например, случай простого алгоритма состоит в том, что местоположение обнаруженного металлического объекта используется в качестве начальной точки для более локализованного шаблона поиска. Этот вариант осуществления может обеспечивать более точную или подробную информацию о местоположении и/или размере металлического объекта.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор повторять управление градиентным источником питания, используя модифицированный шаблон поиска металлического объекта, для перемещения зоны ослабленного поля в другом заданном шаблоне вблизи местоположения одного или более металлических объектов и последующей коррекции местоположения одного или более объектов с заново приобретенными электрическими данными, полученными по меньшей мере одним электрическим датчиком.
В другом варианте осуществления может быть множество катушек в наборах катушек, и направление магнитного поля в общем случае может выбираться произвольно. Это может облегчить нахождение объектов разной формы. Например, если имеется объект кольцеобразной формы, то могут существовать местоположения, в которых отсутствует наведенный вихревой ток. Например, если магнитный поток не направлен через кольцо.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор обнаруживать изменение в электрических данных, когда зона слабого поля перемещается в заданном шаблоне, выполнением любого одного из следующих действий: обнаружение изменения в напряжении, измеренном по меньшей мере одним электрическим датчиком; обнаружение изменения в токе, измеренном по меньшей мере одним электрическим датчиком; обнаружение изменения в импедансе, измеренном по меньшей мере одним электрическим датчиком; обнаружение изменения в метрических измерениях портов в наборе катушек; обнаружение изменения в перекрестном импедансе, измеренном между набором катушек; и их сочетаний.
В другом варианте осуществления изменяющееся во времени электропитание является электропитанием в форме незатухающих колебаний (CW), и шаблон поиска металлического объекта является непрерывным путем через зону измерений.
В другом варианте осуществления изменяющееся во времени электропитание является импульсным электропитанием, и шаблон поиска металлического объекта содержит набор дискретных местоположений внутри зоны измерений.
В другом варианте осуществления электрический датчик является датчиком тока и/или датчиком напряжения, и/или датчиком фазы.
В другом варианте осуществления набор катушек дополнительно содержит вторую катушку для генерации второго магнитного поля во втором направлении.
В другом варианте осуществления вторая градиентная катушка является второй разделенной градиентной катушкой. Вторая градиентная катушка имеет третий участок катушки и четвертый участок катушки. Источник питания градиентной катушки дополнительно выполнен с возможностью раздельной подачи изменяющегося во времени электропитания на третий участок катушки и четвертый участок катушки. Шаблон поиска металлического объекта дополнительно побуждает градиентный источник питания изменять ток, подаваемый на третий участок катушки и четвертый участок катушки, для того чтобы перемещать зону ослабленного поля в заданном шаблоне внутри зоны визуализации.
В другом варианте осуществления набор катушек дополнительно содержит третью катушку для генерации третьего магнитного поля в третьем направлении.
В другом варианте осуществления третья градиентная катушка является третьей разделенной градиентной катушкой. Третья градиентная катушка имеет пятый участок катушки и шестой участок катушки. Источник питания градиентной катушки дополнительно выполнен с возможностью раздельной подачи изменяющегося во времени электропитания на пятый участок катушки и шестой участок катушки. Шаблон поиска металлического объекта дополнительно побуждает градиентный источник питания изменять ток, подаваемый на пятый участок катушки и шестой участок катушки, для того чтобы перемещать зону ослабленного поля в заданном шаблоне внутри зоны визуализации.
В другом варианте осуществления электрические данные представляют электропитание, подаваемое на вторую градиентную катушку и/или третью градиентную катушку.
В другом аспекте изобретение представляет систему магнитно-резонансной визуализации для приобретения данных магнитного резонанса из зоны визуализации. Система магнитно-резонансной визуализации дополнительно содержит металлодетектор в соответствии с вариантом осуществления. Набор катушек для металлодетектора является набором градиентных катушек. Память дополнительно содержит последовательность импульсов для управления системой магнитно-резонансной визуализации с целью приобретения данных магнитно-резонансной визуализации из зоны визуализации. Градиентные катушки располагаются с целью генерации первого магнитного поля, второго магнитного поля и третьего магнитного поля по меньшей мере в зоне визуализации. Зона измерений является зоной визуализации или перекрывает ее по меньшей мере частично. Первое магнитное поле является первым градиентным магнитным полем. Второе магнитное поле является вторым градиентным магнитным полем. Третье магнитное поле является третьим градиентным магнитным полем. Источник питания катушек служит для подачи электропитания на первую катушку, вторую катушку и третью катушку с целью обеспечения пространственно кодированного магнитного поля для пространственного кодирования магнитных спинов внутри зоны визуализации во время приобретения данных магнитного резонанса.
Стандартные градиентные катушки для магнитно-резонансной визуализации обычно оптимизируются, чтобы иметь линейный наклон или градиент магнитного поля. Некоторые системы магнитно-резонансной визуализации могут иметь дополнительные градиентные катушки внутри нелинейных наклонов для использования в уменьшении артефактов. Они могут именоваться вставками более высокого порядка (HOS). Использование градиентных катушек в системе магнитно-резонансной визуализации для обнаружения местоположения металла не сказывается на наклоне или градиенте поля. Поэтому градиентные катушки, которые имеют линейный или нелинейный наклоны, могут быть использованы для определения местоположения металлического объекта.
В некоторых вариантах осуществления источник питания катушек может содержать два разных блока источника питания, один для подачи питания на набор катушек, когда он используется в качестве металлодетектора, и отдельный источник питания, когда набор катушек используется в качестве градиентных катушек для приобретения данных магнитного резонанса. Возможно также построить один источник питания, который способен выполнять обе функции.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор управлять системой магнитно-резонансной визуализации для приобретения данных магнитного резонанса, используя последовательность импульсов. Исполнение команд дополнительно побуждает процессор реконструировать магнитно-резонансное изображение, используя данные магнитного резонанса. Реконструированное магнитно-резонансное изображение может быть, например, запомнено в блоке памяти некоторого типа на компьютере или послано через сеть в другой компьютер. Реконструированное магнитно-резонансное изображение может быть также выведено на дисплей.
В некоторых примерах три катушки выровнены в ортогональных направлениях. Так называемые разделенные градиентные катушки могут быть использованы для набора катушек. Например, стандартная катушка для магнитного резонанса с z-градиентной катушкой может быть разделена. В направлении не по оси z разделенные катушки могут быть реализованы, например, используя нечто подобное 2*анти-Гельмгольц катушке. В этом примере каждая из трех градиентных катушек имеет два порта. Это соответствует двум парам проводов и концов. На каждую половину градиентной катушки может поэтому раздельно подаваться электропитание. Во время нормальной работы две обмотки или участки катушки обычно соединены последовательно, так что возникает один и тот же ток. Когда система используется как металлодетектор, катушки электрически разделены, и питание подается на каждую из них раздельно.
В некоторых примерах три градиентные катушки могут быть выровнены в ортогональных направлениях. Как минимум, первое направление не выравнивается со вторым или третьим направлением, и второе и третье направления не выровнены.
В другом варианте осуществления последовательность импульсов побуждает процессор приобретать данные магнитного резонанса, используя поляризованное радиочастотное поле передачи. Исполнение команд дополнительно побуждает процессор изменять последовательность импульсов, используя местоположение по меньшей мере одного металлического объекта, так что поляризованное RF поле передачи образует зону или область ослабленного электрического поля переменного тока (AC) в местоположении по меньшей мере одного металлического объекта. Этот вариант осуществления может иметь преимущество в том, что сначала было обнаружено местоположение металлического объекта и затем изменена последовательность импульсов, так что RF поле вблизи металлического объекта ослаблено. Это может привести в результате к улучшенной визуализации и повышенной безопасности пациента.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор изменять последовательность импульсов, чтобы увеличить длительность радиочастотного импульса с целью уменьшения пиковых значений радиочастотных полей, наводимых в зоне визуализации, при обнаружении по меньшей мере одного металлического объекта.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор изменять последовательность импульсов, для того чтобы задержать приобретение данных магнитного резонанса по меньшей мере на один период задержки, чтобы позволить по меньшей мере одному металлическому объекту охладиться, при обнаружении по меньшей мере одного металлического объекта.
В другом варианте осуществления система магнитно-резонансной визуализации содержит многоканальную радиочастотную систему для генерации B1 поля в приобретении данных магнитного резонанса. Исполнение команд дополнительно побуждает процессор изменять последовательность импульсов, чтобы отрегулировать B1 поле с целью ослабления B1 поля в местоположении одного или более металлических объектов.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор вычислять пространственно зависимую карту металлического объекта в пределах зоны визуализации, используя местоположение по меньшей мере одного металлического объекта.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор накладывать карту металлического объекта на данные магнитного резонанса. Заметим, что объединенное изображение может, например, быть представлено или выведено на дисплей, или запомнено.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор определять объем одного или более металлических объектов, используя карту металлического объекта. Исполнение команд дополнительно побуждает процессор прекратить приобретение данных магнитного резонанса, если объем одного или более металлических объектов превышает заданный объем.
В некоторых примерах упомянутый источник питания градиентной катушки может иметь отдельные источники питания для визуализации и для обнаружения металла.
В некоторых примерах изменяющееся во времени электропитание, подаваемое на участки катушки, может иметь действенную частоту в пределах от 10 кГц и до около 100 кГц.
В некоторых примерах шаблон поиска металлических объектов следует кривой Лиссажу.
В другом аспекте изобретение представляет компьютерный программный продукт, содержащий исполняемые машиной команды для процессора, управляющего металлодетектором. Металлодетектор содержит набор катушек, содержащий по меньшей мере первую катушку для генерации первого магнитного поля в первом направлении. Первая катушка содержит первый участок катушки и второй участок катушки. Разделенная катушка, как она используется здесь, означает катушку, которая может быть соединена и использована как единая катушка, или может быть разъединена, и на каждую ее часть электропитание может подаваться раздельно. Металлодетектор дополнительно содержит источник питания катушек для раздельной подачи изменяющегося во времени электропитания на набор катушек. Источник питания градиентной катушки выполнен с возможностью раздельной подачи изменяющегося во времени электропитания на набор катушек. Металлодетектор дополнительно содержит по меньшей мере один электрический датчик для измерения электрических данных от поля измерений или по меньшей мере от первого участка катушки и второго участка катушки. Металлодетектор дополнительно содержит память, содержащую шаблон поиска металлического объекта, а шаблон поиска металлического объекта содержит команды источника питания для управления источником питания катушек с целью подачи независимо изменяющегося во времени электропитания на набор катушек.
Команды источника питания дополнительно побуждают источник питания подавать независимо изменяющееся во времени электропитание по меньшей мере на первый участок катушки и второй участок катушки, чтобы образовать зону ослабленного поля внутри зоны измерений. Зона ослабленного поля имеет изменяющуюся во времени составляющую магнитного поля с величиной меньше заданной напряженности магнитного поля. Шаблон поиска металлического объекта дополнительно побуждает градиентный источник питания изменять ток, подаваемый в первый участок катушки и второй участок катушки, чтобы перемещать зону ослабленного поля в заданном шаблоне в пределах зоны измерений.
Исполнение команд побуждает процессор управлять градиентным источником питания, используя шаблон поиска металлического объекта, чтобы перемещать зону ослабленного поля в заданном шаблоне. Исполнение команд дополнительно побуждает процессор измерять электрическим датчиком электрические данные во время перемещения зоны ослабленного поля в заданном шаблоне.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор определять местоположение по меньшей мере одного металлического объекта внутри зоны измерений обнаружением изменения в электрических данных, когда зона ослабленного поля перемещается в заданном шаблоне.
Понятно, что один или более вышеупомянутых вариантов осуществления изобретения могут объединяться, когда объединяемые варианты осуществления не являются взаимно исключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В последующем предпочтительные варианты осуществления изобретения будут описаны только в качестве примеров и со ссылками на чертежи, на которых:
ФИГ. 1 - представлен пример металлодетектора;
ФИГ. 2 - пример блок-схемы последовательности операций, который описывает порядок работы с металлодетектором, показанным на фиг. 1;
ФИГ. 3 - пример системы магнитно-резонансной визуализации, которая включает в себя металлодетектор, использующий градиентные катушки;
ФИГ. 4 - набор разделенных градиентных катушек;
ФИГ. 5 - представление точки нулевого поля, создаваемой градиентными катушками, показанными на фиг.4;
ФИГ. 6 - еще одно представление точки нулевого поля, создаваемой градиентными катушками, показанными на фиг.4;
ФИГ. 7 - еще одно представление точки нулевого поля, создаваемой градиентными катушками, показанными на фиг.4;
ФИГ. 8 - представление некоторых средств аппаратного и программного обеспечения модифицированной системы магнитно-резонансной визуализации; и
ФИГ. 9 - представление некоторых дополнительных средств аппаратного и программного обеспечения другой модифицированной системы магнитно-резонансной визуализации.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Подобные пронумерованные элементы на этих чертежах являются либо эквивалентными элементами, либо выполняющими такие же функции. Элементы, которые были обсуждены выше, не обязательно будут обсуждаться на последующих чертежах, если их функции эквивалентны.
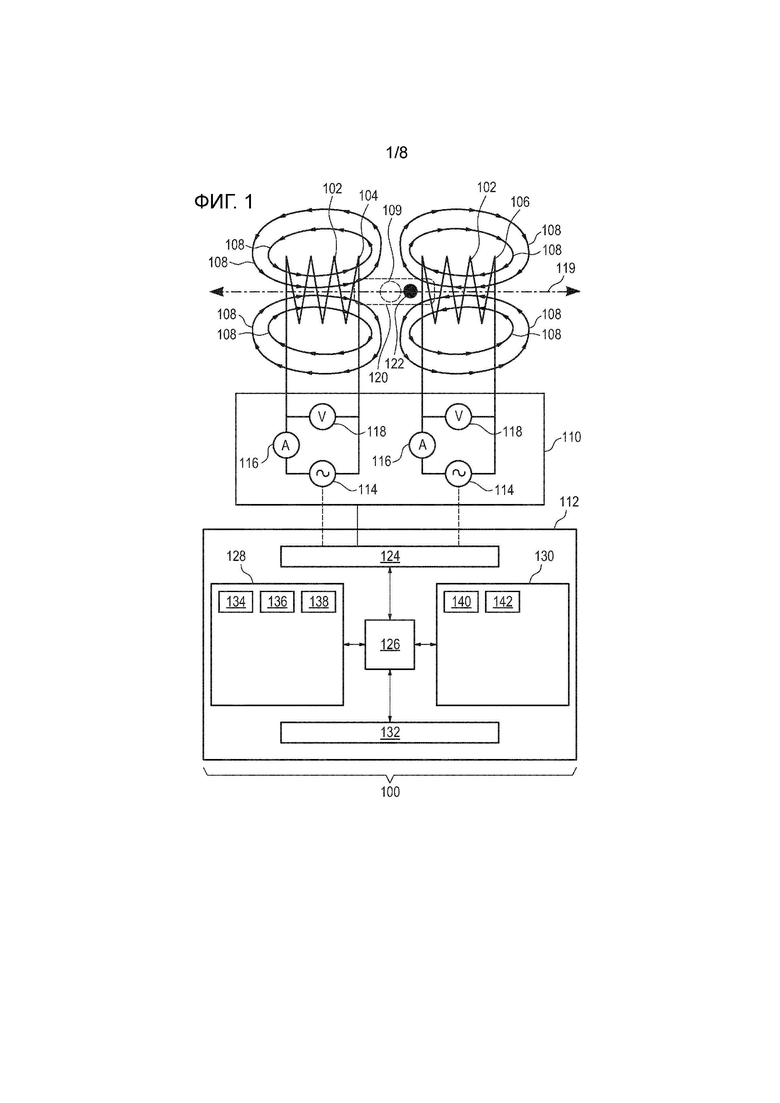
На фиг. 1 показан пример металлодетектора 100. Металлодетектор имеет первую катушку 102. Первая катушка 102 разделена на первый участок 104 катушки и второй участок 106 катушки. Два участка 104, 106 катушки могут быть электрически соединены и работать как одна катушка или они могут получать электропитание раздельно. Два участка 104, 106 катушки генерируют линии 108 магнитного поля. Как можно увидеть на этом чертеже, работа катушек производится таким образом, что они генерируют электромагнитные поля в противоположных направлениях. Использование цилиндрически симметричных катушек на фиг. 1 является просто примером. Участки катушки не обязательно должны быть цилиндрическими катушками. Например, участки катушки могут быть частью ʺразделеннойʺ градиентной катушки для системы магнитно-резонансной визуализации.
Это дает в результате зону 109 ослабленного поля, которая имеет магнитное поле ниже заданного порогового значения. Первая катушка 102 подсоединена к источнику 110 питания катушек, который, в свою очередь, управляется компьютером 112. Внутри источника 110 питания катушек дано представление о том, как могут управляться катушки 104, 106. Каждая из них подсоединена к отдельному источнику 114 питания переменного тока (AC). AC источник 114 питания имеет датчик 116 тока и датчик 118 напряжения. Использование этих источников 114 питания и датчиков 116 и 118 приводится в качестве примера. Способ может выполняться только с датчиками 116 тока или датчиками 118 напряжения.
Полярность электропитания, подаваемого на каждый из участков 104, 106 катушки, противоположна. При изменении величины электрической мощности, подаваемой на каждый из участков 104, 106 катушки, зона 109 ослабленного поля может перемещаться вдоль первого направления 119. Когда два участка катушки работают как одна катушка, они генерируют поле в первом направлении 119. Когда они работают в разделенном режиме, два участка катушки генерируют поле в противоположных направлениях, образуя в результате зону 109 ослабленного поля, которая способна перемещаться вдоль первого направления 119. Пунктирные линии 120 указывают зону 120 измерений, через которую может перемещаться зона 109 ослабленного поля. Объект 122 является металлическим объектом и расположен на линии или вблизи линии, указывающей первое направление 119. Когда зона 109 ослабленного поля находится над металлическим объектом, происходит ослабление вихревых токов, которые наводятся в металлическом объекте 122 вследствие переменных магнитных полей 108. Перемещая зону 109 ослабленного поля в разные местоположения, можно сделать заключение о местоположении металлического объекта 122, производя измерения с использованием датчиков 116 и 118. Например, когда нет металлического объекта 122 вблизи участков 104, 106 катушки, могут быть зарегистрированы исходные опорные данные. Такой же процесс может быть затем повторен, когда металлический объект 122 находится вблизи катушек и внутри зоны 120 измерений. Сравнивая предшествующие измеренные данные с вновь полученными данными, можно сделать заключение о местоположении металлического объекта 122.
AC источники 114 питания показаны подсоединенными к аппаратному интерфейсу 124 компьютера 112. Компьютер 112 дополнительно содержит процессор 126, который подсоединен к аппаратному интерфейсу 124, а также к запоминающему устройству 128 компьютера, памяти 130 компьютера и пользовательскому интерфейсу 132.
Запоминающее устройство 128 компьютера показано как содержащее шаблон 134 поиска металлического объекта. Шаблон 134 поиска металлического объекта содержит команды, которые процессор 126 может использовать для управления AC источниками 114 питания для перемещения зоны 109 ослабленного поля в заданном шаблоне вдоль первого направления 119. Запоминающее устройство 128 компьютера дополнительно показано как содержащее электрические данные 136, которые были измерены датчиками 116 и 118.
Запоминающее устройство 128 компьютера дополнительно показано как содержащее местоположение 138 металлического объект, которое было выведено из электрических данных 136.
Память 130 компьютера содержит управляющий модуль 140. Управляющий модуль 140 содержит команды, которые побуждают процессор 126 управлять работой и функциями металлодетектора 100. В памяти 130 компьютера снова показан модуль 142 анализа данных, который способен обрабатывать электрические данные 136 для определения местоположения 138 металлического объекта.
Пример на фиг. 1 представляет, как в общем случае может быть использован металлодетектор для определения точного пространственного положения металлического объекта 122. В примере, показанном на фиг. 1, определяется положение вдоль одного единственного направления 119. Добавляя дополнительные катушки, можно определить положение металлического объекта 122 в трех измерениях. Например, разделенные катушки, на которые электропитание подается раздельно, могут быть расположены в ортогональных или невыровненных направлениях для обеспечения дополнительной информации и быть способными к перемещению зоны 109 ослабленного поля в разных направлениях. Если отсутствует фоновое магнитное поле, то или статические и/или изменяющиеся магнитные поля могут быть использованы для дополнительного управления положением зоны 109 ослабленного поля. В магнитном поле дополнительные катушки должны быть также разделенными катушками. Статическое поле не наводит каких-либо вихревых токов в неподвижном металлическом объекте. Поэтому использование изменяющихся магнитных полей для наведения вихревых токов позволяет металлодетектору 100 функционировать даже внутри областей большого магнитного поля, например, внутри системы магнитно-резонансной визуализации. Если работа происходит в пределах большого магнитного поля, то дополнительные катушки, добавляемые для обеспечения дополнительной пространственной информацию относительно местоположения металлического объекта, должны также быть разделенными катушками, как показано на фиг. 1.
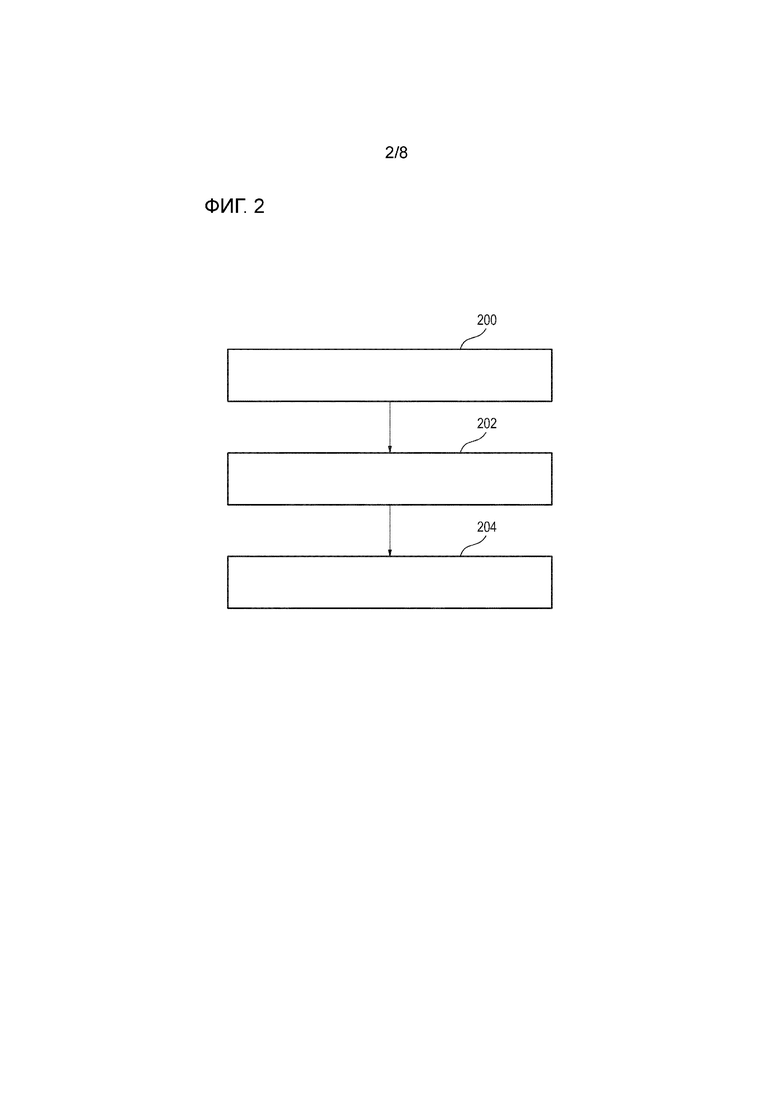
На фиг. 2 показана блок-схема последовательности операций, представляющая способ работы металлодетектора 100 на фиг. 1. Сначала на этапе 200 процессор управляет источником 110 питания, используя шаблон 134 поиска металлического объекта для перемещения зоны 109 ослабленного поля в соответствии с заданным шаблоном. Затем, на этапе 202, процессор 126 измеряет электрические данные 136, используя датчики 116 и 118, во время перемещения зоны 109 ослабленного поля в соответствии с заданным шаблоном в шаблоне поиска металлического объекта. Наконец, на этапе 204, процессор 126 использует модуль 142 для определения местоположения 138 по меньшей мере одного металлического объекта 122 внутри зоны 120 измерений. Это сопровождается обнаружением изменения в электрических данных 136, когда зона 109 ослабленного поля перемещается в заданном шаблоне и поверх металлического объекта 122.
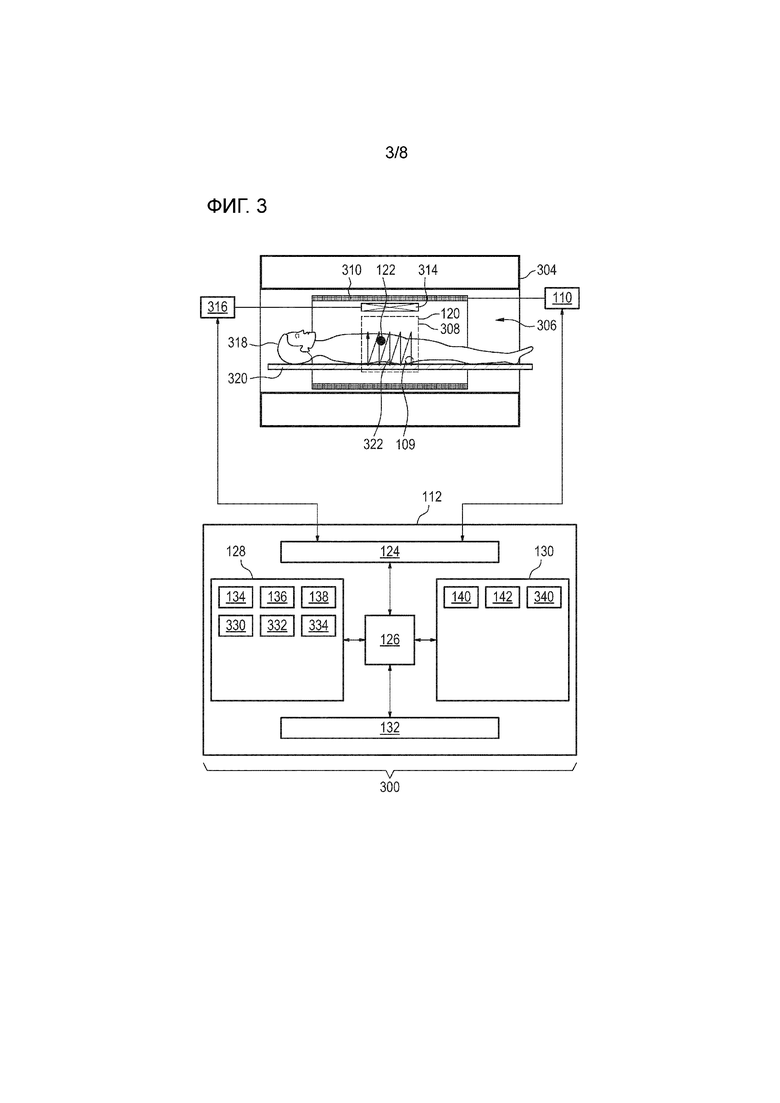
На фиг. 3 показан пример системы 300 магнитно-резонансной визуализации. Система 300 магнитно-резонансной визуализации включает в себя металлодетектор. Система 300 магнитно-резонансной визуализации содержит магнит 304. Магнит 304 является сверхпроводящим магнитом цилиндрического типа с проходящим через него туннелем 306. Возможно также использование магнитов других типов, например, можно также использовать и разделенный цилиндрический магнит, и так называемый открытый магнит. Разделенный цилиндрический магнит подобен стандартному цилиндрическому магниту за исключением того, что криостат разделен на две секции, чтобы обеспечить доступ к изо-плоскости магнита, с тем чтобы магнит мог быть, например, использован в сочетании с терапией пучком заряженных частиц. Открытый магнит имеет две секции магнита, одну над другой, с расстоянием между ними, которое является достаточно большим, чтобы вместить пациента: построение зоны двух секций подобно построению катушки Гельмгольца. Открытые магниты популярны, поскольку пациент находится в менее ограниченном пространстве. Внутри криостата цилиндрического магнита имеется комплект сверхпроводящих катушек. Внутри туннеля 306 цилиндрического магнита 304 имеется зона 308 визуализации, где магнитное поле является сильным и достаточно однородным для выполнения магнитно-резонансной визуализации.
Внутри зоны визуализации существует поле 309 наблюдения, откуда собираются данные магнитного резонанса. Данные собираются в k-пространстве и затем трансформируются в пространство изображений, используя преобразование Фурье. Собранные в k-пространстве данные поэтому представляют также области за пределами поля наблюдения.
Внутри туннеля 306 магнита существует также набор градиентных катушек 310 магнитного поля, которые используются для приобретения данных магнитного резонанса с целью пространственного кодирования магнитных спинов внутри зоны 308 визуализации магнита 304. Градиентные катушки 310 магнитного поля подсоединяются к источнику 110 питания градиентных катушек магнитного поля. Градиентные катушки 310 магнитного поля приведены в качестве примера. Обычно градиентные катушки 310 магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник питания для градиентного магнитного поля подает ток в градиентные катушки магнитного поля. Ток, поданный в градиентные катушки 310 магнитного поля, управляется как зависящая от времени функция и может иметь линейно нарастающую или импульсную форму.
Градиентные катушки 310 содержат набор катушек с первой катушкой, второй катушкой и третьей катушкой. Все градиентные катушки являются разделенными катушками. Зона визуализации, обозначенная в этом в этом случае позицией 308, совпадает с зоной 120 измерений. Подавая переменное электропитание на каждый участок разделенных градиентных катушек, можно обеспечить зону 109 ослабленного поля, которая может перемещаться внутри зоны 120 измерений. Например, если существует металлический объект 122 внутри пациента 318, зона 109 ослабленного поля может перемещаться вдоль пути 322 с целью обнаружения местоположения металлического объекта 122.
Вблизи зоны 308 визуализации имеется радиочастотная катушка 314 для манипулирования ориентацией магнитных спинов внутри зоны 308 визуализации. Радиочастотная антенна может содержать множество элементов катушек. Радиочастотная антенна может также именоваться каналом или антенной. Радиочастотная катушка 314 подсоединена к радиочастотному приемопередатчику 316. Радиочастотная катушка 314 и радиочастотный приемопередатчик 316 могут быть заменены раздельными катушками передачи и приема и раздельными передатчиком и приемником. Понятно, что радиочастотная катушка 314 и радиочастотный приемопередатчик 316 приведены в качестве примера. Радиочастотная катушка 314 служит также для представления специализированной передающей антенны и специализированной приемной антенны. Подобным образом приемопередатчик 316 может также представлять раздельные передатчик и приемник. Радиочастотная катушка 314 может также иметь множество приемных/передающих элементов, и радиочастотный приемопередатчик 316 может иметь множество приемных/передающих каналов.
Источник питания 110 градиентной катушки магнитного поля и приемопередатчик 316 подсоединены к аппаратному интерфейсу 124 компьютерной системы 112. Компьютерная система 112 дополнительно содержит процессор 126. Процессор 126 подсоединен к аппаратному интерфейсу 124, необязательному пользовательскому интерфейсу 132, запоминающему устройству 128 компьютера и к памяти 130 компьютера.
Запоминающее устройство 128 компьютера показано как дистально содержащее последовательность 330 импульсов. Последовательность 330 импульсов представляет собой данные или команды, которые побуждают процессор 126 управлять системой 300 магнитно-резонансной визуализации для приобретения данных 322 магнитного резонанса. Запоминающее устройство 128 компьютера показано как содержащее данные 332 магнитного резонанса, которые были приобретены с использованием последовательности 330 импульсов. Запоминающее устройство 128 компьютера дополнительно показано как содержащее магнитно-резонансное изображение 334, которое было реконструировано из данных 332 магнитного резонанса.
Память 130 компьютера показана как дополнительно содержащая модуль 340 реконструкции изображения, который был использован для реконструкции магнитно-резонансного изображения 334 из данных 332 магнитного резонанса.
Используя модифицированную систему градиентных катушек, MRI сканер может быть использован в качестве металлодетектора. Пространственное разрешение может быть получено небольшим изменением в существующей градиентной системе, которое предоставляет возможность асимметричного управления единственными градиентными каналами.
В некоторых MRI сканерах, особенно в сканерах, объединенных с LINAC системами, градиентная катушка уже сегодня разделена на две половины вдоль оси z (направление B0 поля). Используя независимые каналы для этих частей, можно сформировать градиентное поле более гибким, не производя слишком больших затрат (только немного больше градиентных кабелей). Мы используем эту гибкость для перемещения свободной от поля точки (FFP) в градиентной системе. FFP находится внутри зоны ослабленного поля. С помощью такого технического приема мы способны определить местоположение проводящего имплантата внутри пациента.
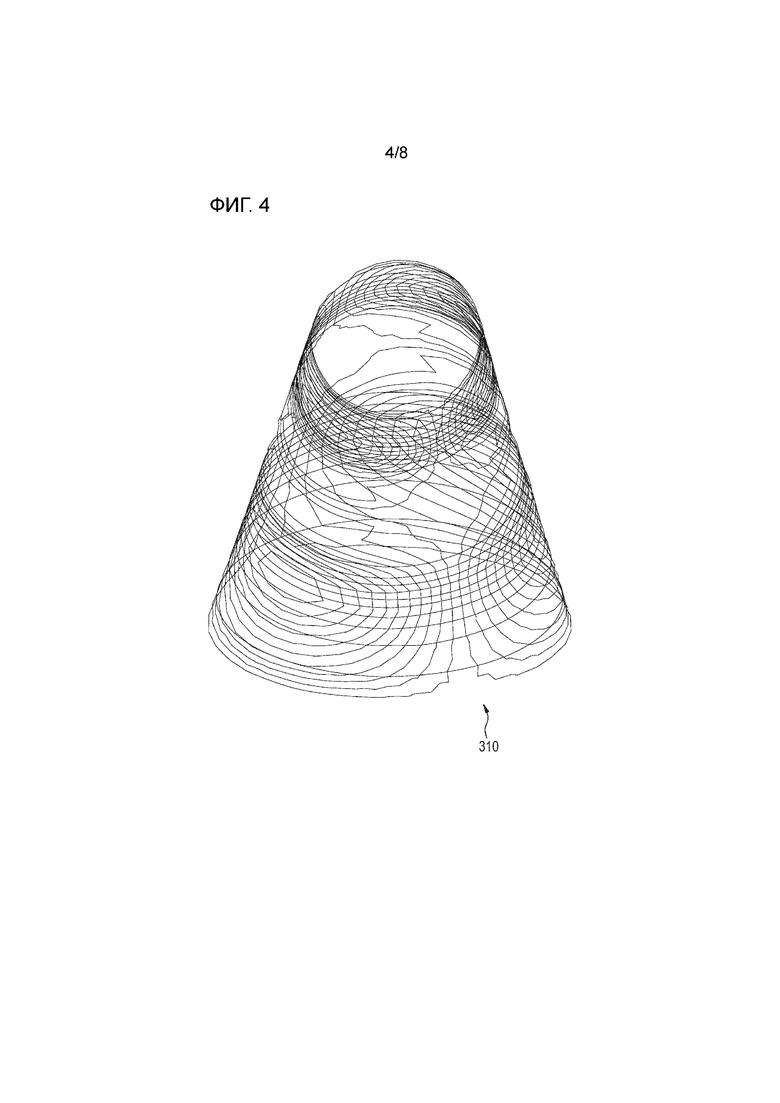
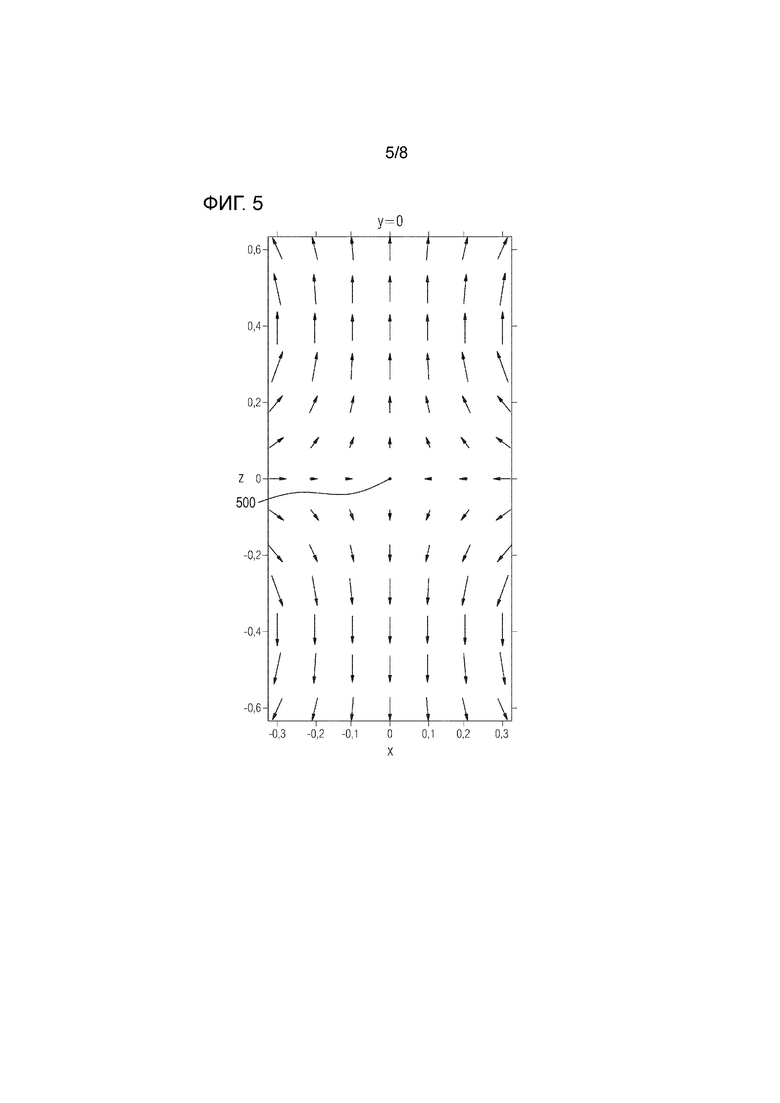
На фиг. 4 показан пример простой конфигурации градиентной катушки 310. На этом чертеже показана катушка с разделением по осям x и z. Катушка по оси y не показана. На фиг. 5, 6 и 7 показаны поля, генерируемые градиентной катушкой, конфигурация которой представлена на фиг. 4.
Такая градиентная катушка создает магнитное поле, которое сформировано как имеющее сильный градиент в его z-составляющей для трех пространственных направлений. Если включается именно z-градиентная катушка, создается поле, как показанное слева на фиг. 2. Z-Составляющая имеет линейную форму по оси z. Кроме того, существует точно одна точка в пространстве, в которой вообще не генерируется поле. Без каких-либо дополнительных действий эта точка располагается в изоцентре.
При разделенной градиентной катушке, показанной на фиг. 4, ток может течь в противоположных направлениях для двух половин, z<0 и z>0. Добавлением возбуждения постоянным током, который имеет одно и то же направление в обеих половинах, осуществляется генерация приблизительно однородного поля. Накладывая друг на друга оба поля, получаем в результате ситуацию, представленную графически в центральной части на фиг. 5-7. В этом случае свободная от поля точка сдвигается в z-направлении. Используя также однородные возбуждения для двух других направлений поля, x и y, можно будет перемещать свободную от поля точку произвольно внутри градиентной катушки.
На фиг. 5 показано магнитное поле, создаваемое катушкой 310, со свободной от поля точкой, обозначенной крестиком 500. Зона ослабленного поля располагается по соседству вокруг свободной от поля точки, где изменяющееся во времени магнитное поле имеет величину ниже заданного порогового значения. Вследствие того, что только изменяющееся во времени магнитное поле имеет значение для электрических данных, местоположение металла внутри высоко статического магнитного поля может быть точно определено.
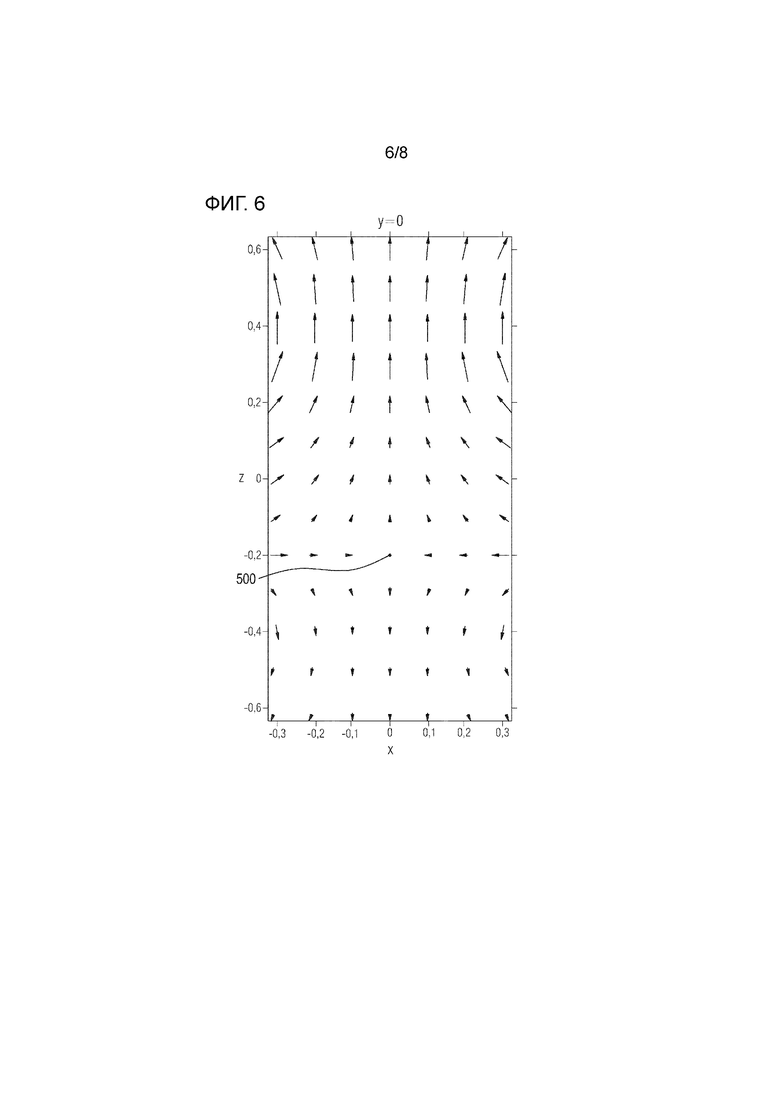
На фиг. 6 магнитное поле по оси z претерпело наложение 60% в направлении z. Свободная от поля точка была сдвинута в положение z=-20 см.
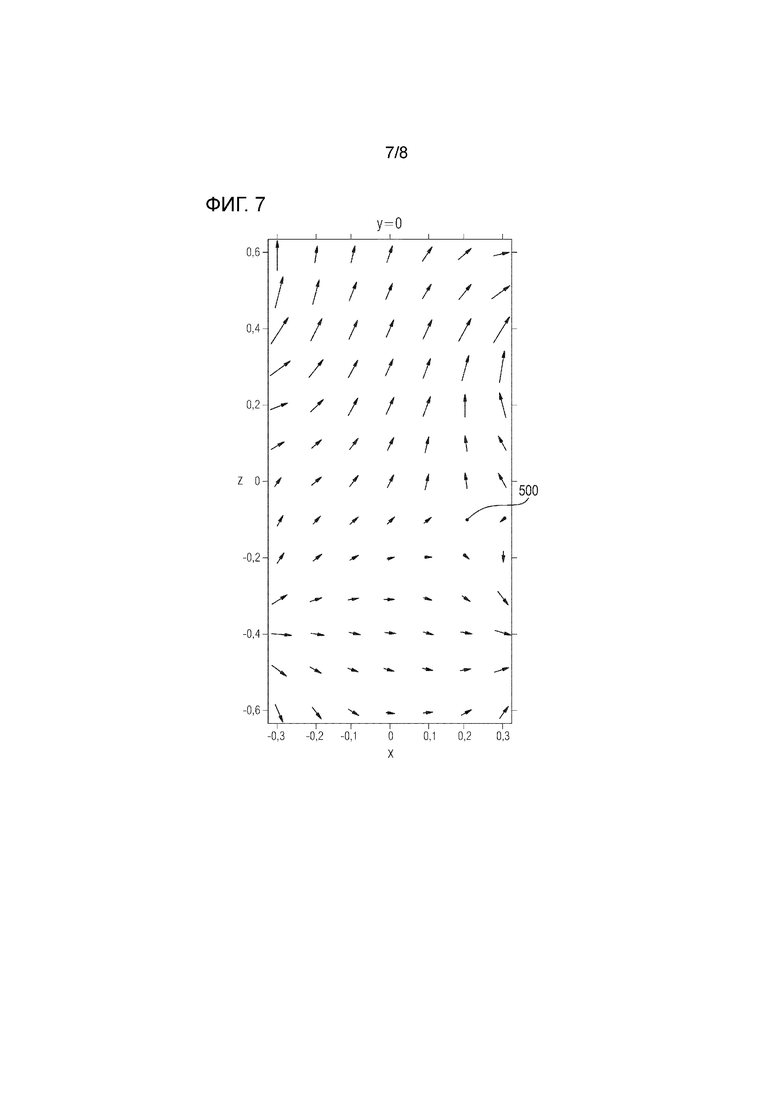
На фиг. 7, используя однородное z поле с наложением 70% на переменное магнитное поле и x магнитное поле 90%, такое наложение перемещает свободную от поля точку в положение x=20 см и z=-10 см. Свободная от поля точка может перемещаться наложением переменных магнитных полей на однородные поля.
Стандартная z-градиентная катушка подобна анти-Гельмгольц катушке. Не совпадающие с осью z направления могут быть реализованы катушками, которые приблизительно соответствуют двойной анти-Гельмгольц катушке.
Когда используются разделенные градиентные катушки, каждый из трех каналов градиентной катушки имеет два порта (две пары проволочных выводов). Во время нормальной работы две обмотки соединены последовательно и получают ток одной и той же величины, I1=I2, что приводит в результате к одному внешнему порту катушки. Ориентация токов противоположна (что обозначается как ʺантиʺ), создавая свободную от поля точку в фиксированной позиции. Разделение последовательного соединения и обеспечение I1=α*I2 позволяет сдвинуть свободную от поля точку. Большинство MRI градиентных катушек электрически разделены, то есть не имеют внутреннего соединения двух участков катушки, и фиксированные провода на внешних клеммах катушки соединяют пары желаемым образом. Устранение соединения и подсоединение свободных клемм к дополнительным источникам питания градиентной катушки создает разделенную градиентную катушку. Для специальных целей (создание градиентной катушки прозрачной для ионизирующего излучения) была разработана механически разделяемая градиентная катушка, и эта катушка имеет две половины без меди в центральном объеме трубы, то есть участок катушечной пары разделяется на две половины, с тем чтобы в результате образовались четыре порта катушки для одной ориентации градиента.
Большинство металлодетекторов, используемых сегодня, основано на импульсном или непрерывном (CW) возбуждении. Импульсный детектор посылает импульсы магнитного поля и принимает немедленно после этого импульса магнитные поля вихревого тока. CW детектор посылает непрерывное магнитное поле переменного тока (AC) и анализирует в передающей или во второй приемной катушке деформацию сигнала вследствие дополнительных вихревых токов. В принципе, оба технических подхода могут также использовать нелинейные эффекты, например, чтобы классифицировать материал, генерирующий вихревые токи.
Оба технических подхода могут быть применены в модификации MRI сканера. Возбуждение применяется для свипирования FFT через объем сканера, обеспечивая характеристический отклик на каждую позицию FFT. Отклик зависит от проводимости материала, заполняющего объем, взвешенной по отношению к напряженности локального поля. В общем случае металлический материал оказывает сильное воздействие на отклик, так как его проводимость на порядки по величине выше, чем проводимость ткани человека. Однако, если FFP перемещается в положение металлического имплантата, он не может оказывать какого-либо воздействия, поскольку вихревые токи равны нулю.
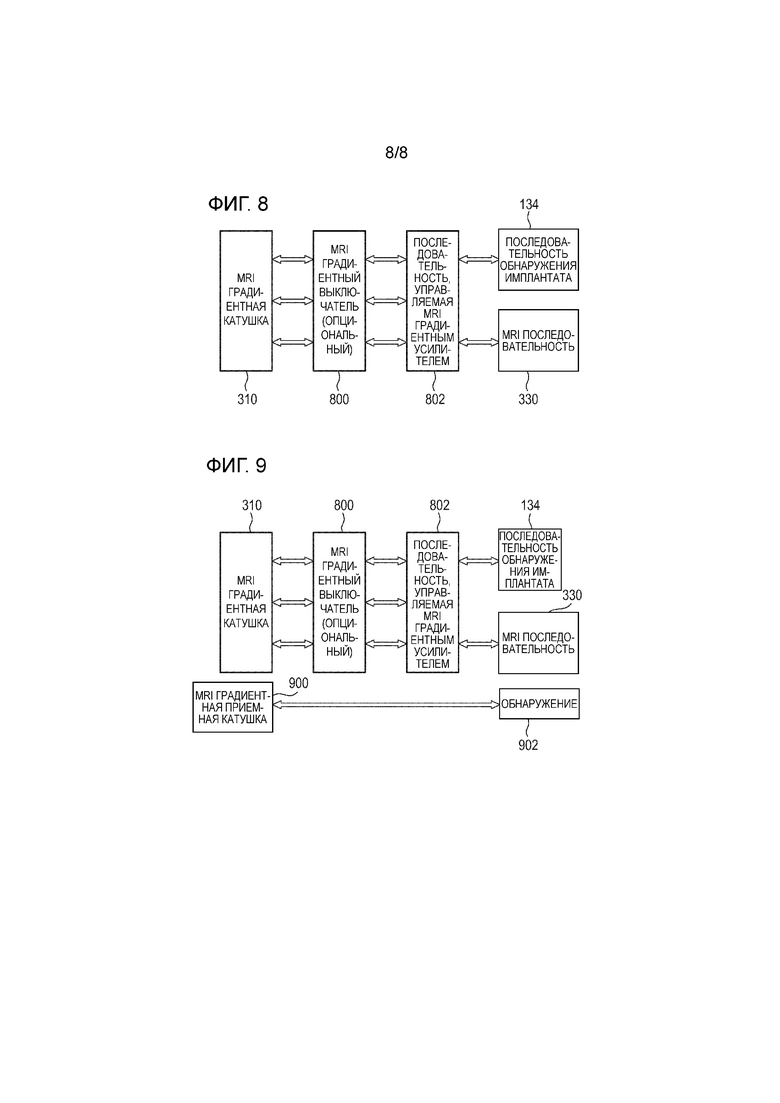
На фиг. 8 показаны некоторые средства аппаратного и программного обеспечения модифицированной системы магнитно-резонансной визуализации. Имеется градиентная катушка 310 магнитно-резонансной визуализации, которая подсоединена к необязательному градиентному выключателю 800 магнитно-резонансной визуализации. Например, градиентный выключатель 800 может быть использован для изменения полярности на обратную или для отсоединения участков катушки друг от друга. Выключатель 800 может быть подсоединен к градиентному усилителю магнитно-резонансной визуализации или к управляемой градиентным усилителем магнитно-резонансной визуализации последовательности 802. Она, в свою очередь, может управляться последовательностью магнитно-резонансной визуализации или последовательностью 330 импульсов, или быть также управляемой последовательностью обнаружения имплантата или шаблоном 134 поиска металлического объекта.
На фиг. 9 показаны те же средства, что и на фиг. 8, с некоторыми дополнительными средствами. Например, система может также включать в себя градиентную катушку 900 магнитно-резонансной визуализации, располагаемую на пациенте или около него. Например, локальная катушка может быть использована для обеспечения градиентного поля вблизи головы пациента. Сигналы от градиентной катушки 900 магнитно-резонансной визуализации могут затем обнаруживаться (902) во время выполнения последовательности 134 обнаружения имплантата, используя приемные катушки для непосредственного измерения генерируемого магнитного поля. Например, катушки могут быть использованы как специализированные датчики для измерения изменяющегося магнитного поля, которые могут быть включены в состав градиентной катушки 900. Изменяющееся магнитное поле будет также наводить ток в самих градиентных катушках. Возможно также измерять наведенные токи в градиентной катушке.
Хотя изобретение было представлено и описано подробно на чертежах и в приведенном выше описании, такое представление и описание должно рассматриваться как иллюстративное или приводимое в качестве примера и не ограничивающее; изобретение не ограничивается представленными примерами осуществления.
Другие изменения применительно к описанным вариантам осуществления могут быть поняты и реализованы специалистами в данной области техники при практическом внедрении заявленного изобретения на основе изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово ʺсодержащийʺ не исключает других элементов или этапов, а указание единственного числа не исключает множественности. Один процессор или другое устройство может выполнять функции нескольких предметов, указанных в формуле изобретения. Простой факт, что определенные меры упомянуты во взаимно отличающихся зависимых пунктах формулы изобретения, не означает того, что сочетание этих мер не может быть выгодно использовано. Компьютерная программа может запоминаться/распределяться на подходящем носителе, таком как оптический запоминающий носитель или твердотельный носитель, поставляемый вместе или как часть другого аппаратного обеспечения, но может также распределяться другим образом, таким как через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные позиции в пунктах формулы изобретения не должны восприниматься как ограничивающие его объем.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
100 металлодетектор
102 первая катушка
104 первый участок катушки
106 второй участок катушки
108 линии магнитного поля
109 зона ослабленного поля
110 источник питания катушек
112 компьютер
114 источник питания переменного тока (AC)
116 датчик тока
118 датчик напряжения
119 первое направление
120 зона измерений
122 металлический объект
124 аппаратный интерфейс
126 процессор
128 запоминающее устройство компьютера
130 память компьютера
132 пользовательский интерфейс
134 шаблон поиска металлического объекта
136 электрические данные
138 местоположение металлического объекта
140 управляющий модуль
142 модуль анализа данных
300 система магнитно-резонансной визуализации
304 магнит
306 туннель магнита
308 зона визуализации
310 градиентные катушки магнитного поля
314 радиочастотная катушка
316 приемопередатчик
318 пациент
320 опора пациента
322 путь
330 последовательность импульсов
332 данные магнитного резонанса
334 магнитно-резонансное изображение
340 модуль реконструкции изображения
500 свободная от поля точка
800 MRI градиентный выключатель
802 последовательность, управляемая MRI градиентным усилителем
900 MRI градиентная приемная катушка
902 обнаружение
Изобретение относится к металлодетекторам, используемым для магнито-резонансной визуализации. Сущность: металлодетектор (100, 300) содержит по меньшей мере первую катушку (102) для генерации первого магнитного поля (108) вдоль первого направления (119). Первая катушка является разделенной катушкой с первым (104) и вторым (106) участками. Источник (110) питания катушек раздельно подает изменяющееся во времени электропитание на участки катушки. По меньшей мере один электрический датчик (116, 118) для измерения электрических данных (136) представляет электропитание, подаваемое по меньшей мере на первый участок катушки и на второй участок катушки. Память (130) содержит исполняемые машиной команды (140, 142, 340) и шаблон (134) поиска металлического объекта, который содержит команды источника питания для управления источником питания для подачи независимо изменяющегося во времени электропитания на набор катушек. Команды источника питания дополнительно побуждают источник питания подавать независимо изменяющееся во времени электропитание на первый участок катушки и на второй участок катушки, чтобы создать внутри зоны измерений зону (109) ослабленного поля, которая имеет изменяющуюся во времени составляющую магнитного поля с величиной ниже заданной напряженности магнитного поля. Шаблон поиска металлического объекта дополнительно побуждает источник питания катушек изменять ток, подаваемый в набор катушек, чтобы перемещать зону ослабленного поля в заданном шаблоне (322) внутри зоны измерений. Исполнение команд побуждает процессор управлять (200) источником питания, используя шаблон поиска металлического объекта, для перемещения зоны ослабленного поля в заданном шаблоне, измерять (202) по меньшей мере одним электрическим датчиком электрические данные во время перемещения зоны ослабленного поля в заданном шаблоне, определять (204) местоположение по меньшей мере одного металлического объекта внутри зоны измерений посредством обнаружения изменения в электрических данных, когда зона ослабленного поля перемещается в заданном шаблоне. 3 н. и 12 з.п. ф-лы, 9 ил.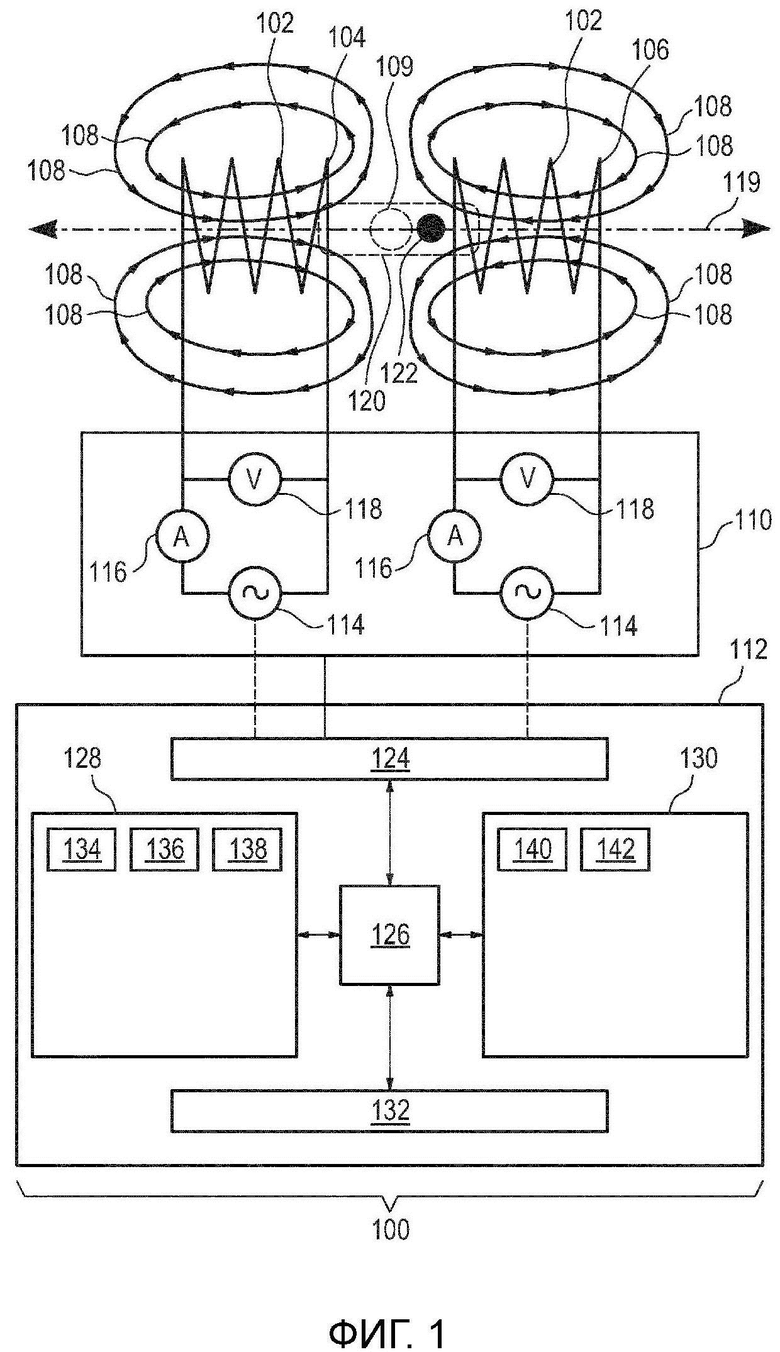
1. Металлодетектор (100, 300), который содержит:
- набор катушек (102, 310), содержащий по меньшей мере первую катушку (102) для генерации первого магнитного поля (108) вдоль первого направления (119) внутри зоны (109) измерений, причем первая катушка является первой разделенной катушкой, причем первая катушка содержит первый участок (104) катушки и второй участок (106) катушки;
- источник (110) питания катушек для раздельной подачи изменяющегося во времени электропитания на набор катушек, причем источник питания катушек выполнен с возможностью раздельной подачи изменяющегося во времени электропитания по меньшей мере на первый участок катушки и на второй участок катушки;
- по меньшей мере один электрический датчик (116, 118) для измерения электрических данных (136) от зоны измерений или по меньшей мере от первого участка катушки и от второго участка катушки;
- память (130), содержащую исполняемые машиной команды (140, 142, 340) и шаблон (134) поиска металлического объекта, при этом шаблон поиска металлического объекта содержит команды источника питания для управления источником питания катушек для подачи независимо изменяющегося во времени электропитания на набор катушек, причем команды источника питания дополнительно побуждают источник питания подавать независимо изменяющееся во времени электропитание на первый участок катушки и на второй участок катушки, чтобы образовать зону (109) ослабленного поля вокруг свободной от поля точки внутри зоны измерений, при этом зона ослабленного поля имеет изменяющуюся во времени составляющую магнитного поля с величиной ниже заданной напряженности магнитного поля, при этом шаблон поиска металлического объекта побуждает источник питания изменять ток, подаваемый на набор катушек, для перемещения зоны ослабленного поля в заданном шаблоне (322) внутри зоны измерений; и
- процессор для управления металлодетектором, причем исполнение команд побуждает процессор:
- управлять (200) источником питания, используя шаблон поиска металлического объекта, для перемещения зоны ослабленного поля в заданном шаблоне;
- измерять (202) электрические данные, описывающие отклик на перемещение зоны ослабленного поля во время перемещения зоны ослабленного поля в заданном шаблоне, по меньшей мере одним электрическим датчиком;
- определять (204) местоположение по меньшей мере одного металлического объекта внутри зоны измерений посредством обнаружения изменения в электрических данных, когда зона ослабленного поля перемещается в заданном шаблоне, при этом исполнение команд дополнительно побуждает процессор выполнять любое одно из следующих действий:
- изменение заданного шаблона в процессе работы после обнаружения по меньшей мере одного металлического объекта во время перемещения зоны ослабленного поля в заданном шаблоне; и
- повторение управления источником питания катушек с использованием измененного шаблона поиска металлического объекта для перемещения зоны ослабленного поля в дополнительном заданном шаблоне вблизи местоположения одного или более металлических объектов и последующая коррекция местоположения одного или более металлических объектов с вновь полученными электрическими данными.
2. Металлодетектор по п. 1, в котором электрические данные описывают
- изменение электромагнитной нагрузки первого и второго участков катушки вследствие перемещения зоны ослабленного поля,
или измеренные электрические данные описывают
- отклик на вихревые токи, обусловленные перемещением зоны ослабленного поля.
3. Металлодетектор по п. 1 или 2, в котором исполнение команд дополнительно побуждает процессор обнаруживать изменение в электрических данных, когда зона слабого поля перемещается в заданном шаблоне, производя одно из следующих действий:
- обнаружение изменения напряжения, измеряемого по меньшей мере одним электрическим датчиком;
- обнаружение изменения тока, измеряемого по меньшей мере одним электрическим датчиком;
- обнаружение изменения импеданса, измеряемого по меньшей мере одним электрическим датчиком;
- обнаружение изменения в измерениях портовой матрицы набора катушек;
- обнаружение изменения перекрестного импеданса, измеряемого между набором катушек; и
- их сочетание.
4. Металлодетектор по п. 1, 2 или 3, в котором выполняется любое одно из следующего:
- изменяющееся во времени электропитание является электропитанием в форме незатухающих колебаний и шаблон поиска металлического объекта является непрерывным путем через зону измерений,
- изменяющееся во времени электропитание является импульсным электропитанием и путь поиска металлического объекта содержит набор дискретных местоположений внутри зоны измерений.
5. Металлодетектор по любому одному из предшествующих пунктов, в котором по меньшей мере один электрический датчик является датчиком (116) тока, и/или датчиком (118) напряжения, и/или датчиком фазы для обнаружения фазы изменяющегося во времени электропитания, подаваемого на набор катушек.
6. Металлодетектор по любому одному из предшествующих пунктов, в котором набор катушек дополнительно содержит вторую катушку для генерации второго магнитного поля во втором направлении.
7. Металлодетектор по п. 5, в котором набор катушек дополнительно содержит третью катушку для генерации третьего магнитного поля в третьем направлении.
8. Металлодетектор по любому одному из предшествующих пунктов, в котором электрические данные дополнительно описывают электропитание, подаваемое на вторую катушку и/или на третью катушку.
9. Металлодетектор по любому из пп. 6 или 7, причем вторая катушка является второй разделенной катушкой, причем третья катушка является третьей разделенной катушкой, причем вторая катушка имеет третий участок катушки и четвертый участок катушки, причем третья катушка имеет пятый участок катушки и шестой участок катушки, причем источник питания катушек дополнительно выполнен с возможностью раздельной подачи изменяющегося во времени электропитания на первый участок катушки, второй участок катушки, третий участок катушки, четвертый участок катушки, пятый участок катушки и шестой участок катушки, причем шаблон поиска металлического объекта дополнительно побуждает источник питания катушек изменять ток, подаваемый на первый участок катушки, второй участок катушки, третий участок катушки, четвертый участок катушки, пятый участок катушки и шестой участок катушки для перемещения зоны ослабленного поля в заданном шаблоне внутри зоны визуализации.
10. Система (300) магнитно-резонансной визуализации для получения данных магнитного резонанса из зоны визуализации, причем система магнитно-резонансной визуализации содержит металлодетектор по п. 8, в котором набор катушек является набором градиентных катушек (310), в котором память дополнительно содержит последовательность (330) импульсов для управления системой магнитно-резонансной визуализации с целью получения данных магнитно-резонансной визуализации из зоны визуализации, в котором набор катушек расположен с возможностью генерации первого магнитного поля, второго магнитного поля и третьего магнитного поля по меньшей мере в зоне визуализации, в котором последовательность импульсов содержит команды для управления источником питания катушек для подачи электропитания на первую катушку, вторую катушку и третью катушку, чтобы обеспечить пространственно кодирующее магнитное поле для пространственного кодирования магнитных спинов внутри зоны визуализации во время получения данных магнитного резонанса.
11. Система магнитно-резонансной визуализации по п. 10, в которой исполнение команд дополнительно побуждает процессор:
- управлять системой магнитно-резонансной визуализации для получения данных магнитного резонанса, используя последовательность импульсов, и
- реконструировать магнитно-резонансное изображение (334), используя данные магнитного резонанса.
12. Система магнитно-резонансной визуализации по п. 10, в которой последовательность импульсов побуждает процессор получать данные магнитного резонанса, используя поляризованное RF поле передачи, причем исполнение команд дополнительно побуждает процессор изменять последовательность импульсов, используя местоположение по меньшей мере одного металлического объекта, таким образом, чтобы поляризованное RF поле передачи создавало зону слабого АС электрического поля в местоположении по меньшей мере одного металлического объекта.
13. Система магнитно-резонансной визуализации по п. 10, 11 или 12, в которой исполнение команд дополнительно побуждает процессор выполнять одно из следующих действий при обнаружении по меньшей мере одного металлического объекта:
- изменение последовательности импульсов для увеличения длительности радиочастотного импульса с целью уменьшения пиковых радиочастотных полей, наводимых в зоне визуализации,
- изменение последовательности импульсов для обеспечения задержки получения данных магнитного резонанса по меньшей мере на один период задержки, чтобы позволить охладиться по меньшей мере одному металлическому объекту, и
- их сочетание.
14. Система магнитно-резонансной визуализации по любому из пп. 10-13, причем система магнитно-резонансной визуализации содержит многоканальную радиочастотную систему для генерации В1-поля во время получения данных магнитного резонанса, при этом исполнение команд дополнительно побуждает процессор изменять последовательность импульсов для регулировки В1-поля, чтобы ослабить В1-поле в местоположении одного или более металлических объектов.
15. Машиночитаемый носитель, содержащий компьютерный программный продукт, содержащий исполняемые машиной команды для процессора, управляющего металлодетектором по п. 1.
| WO 2014071196 A1, 08.05.2014 | |||
| WO 2013024449 A1, 21.02.2013 | |||
| WO 2008078257 A2, 03.07.2008 | |||
| US 2010109662 A1, 06.05.2010 | |||
| Устройство для шлифования и полирования металлов | 1957 |
|
SU113849A1 |

