ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Изобретение относится к устройству расчета коэффициента замедления.
УРОВЕНЬ ТЕХНИКИ
[0002] Традиционное устройство помощи движению устанавливается в транспортном средстве, чтобы помогать движению транспортного средства. Чтобы помогать движению транспортного средства, устройство помощи движению определяет поведение транспортного средства на основе различных характеристик транспортного средства. Здесь, различные характеристики транспортного средства включают в себя характеристики, которые изменяются в соответствии с условиями движения. Устройства, описанные в патентных документах 1-3, например, доступны в качестве устройств, которые обнаруживают эти изменяющиеся характеристики транспортного средства. Патентный документ 1 описывает систему, которая вычисляет энергию движения транспортного средства. Эта система определяет энергию движения, вычисляя сопротивление уклона, сопротивление воздуха, сопротивление ускорению и сопротивление качению на основе расчетной скорости движения, параметров, относящихся к транспортному средству, и параметров, относящихся к дороге. Патентные документы 2 и 3 описывают устройства, которые оценивают вес транспортного средства.
[0003] Патентный документ 1: Публикация заявки на патент (Япония) №2011-016465 (JP 2011-016465 А)
Патентный документ 2: Публикация заявки на патент (Япония) номер 2007-271282 (JP 2007-271282 А)
Патентный документ 3: Публикация заявки на патент (Япония) номер 2002-81989 (JP 2002-81989 А)
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Здесь, характеристики транспортного средства включают в себя характеристики, относящиеся к замедлению, или, другими словами, характеристики, которые создают сопротивление движению во время движения. Вычисляя эти коэффициенты замедления и выполняя различные типы управления на основе результатов вычисления, транспортное средство может управляться должным образом. Коэффициенты замедления транспортного средства включают в себя коэффициенты, которые изменяются в соответствии с условиями движения. Эти коэффициенты замедления транспортного средства, которые изменяются в соответствии с условиями движения, включают в себя сопротивление воздуха и сопротивление качению, описанные в патентном документе 1, и вес транспортного средства, описанный в патентных документах 2 и 3. В патентных документах 1-3 соответствующие коэффициенты замедления рассчитываются посредством вычисления различных условий, но расчетные коэффициенты замедления могут отклоняться от фактических коэффициентов замедления, приводя к снижению в точности расчета.
[0005] Изобретение было задумано, принимая во внимание обстоятельства, описанные выше, и его целью является предоставление устройства расчета коэффициента замедления, способного рассчитывать коэффициент замедления с более высокой степенью точности.
[0006] Чтобы добиваться цели, описанной выше, изобретение предоставляет устройство расчета коэффициента замедления, рассчитывающее коэффициент замедления транспортного средства, это устройство включает в себя: блок запроса движущей силы, который получает движущую силу транспортного средства; блок запроса скорости, который получает скорость транспортного средства; блок запроса ускорения, который получает ускорение транспортного средства; и блок расчета коэффициента замедления, который рассчитывает множество коэффициентов замедления на основе соотношения между полученными движущей силой, скоростью и ускорением, при этом блок расчета коэффициента замедления меняет коэффициент замедления, который должен быть рассчитан, на основе условий движения транспортного средства.
[0007] Дополнительно, блок расчета коэффициента замедления предпочтительно меняет коэффициент замедления, который должен быть рассчитан на основе скорости и ускорения транспортного средства.
[0008] Дополнительно, коэффициенты замедления предпочтительно включают в себя вес транспортного средства, и блок расчета коэффициента замедления предпочтительно устанавливает вес транспортного средства в качестве коэффициента замедления, который должен быть рассчитан, когда скорость транспортного средства ниже порогового значения, а ускорение выше порогового значения.
[0009] Дополнительно, коэффициенты замедления предпочтительно включают в себя коэффициент сопротивления воздуха, и блок расчета коэффициента замедления предпочтительно задает коэффициент сопротивления воздуха в качестве коэффициента замедления, который должен быть рассчитан, когда скорость транспортного средства выше порогового значения, а ускорение ниже порогового значения.
[0010] Дополнительно, коэффициенты замедления предпочтительно включают в себя сопротивление движению, и блок расчета коэффициента замедления предпочтительно устанавливает сопротивление движению в качестве коэффициента замедления, который должен быть рассчитан, когда скорость транспортного средства ниже порогового значения, и ускорение ниже порогового значения.
[0011] Чтобы добиваться цели, описанной выше, изобретение является устройством расчета коэффициента замедления, которое рассчитывает коэффициент замедления транспортного средства, включающим в себя: блок запроса движущей силы, который получает движущую силу транспортного средства; блок запроса скорости, который получает скорость транспортного средства; блок запроса ускорения, который получает ускорение транспортного средства; и блок расчета коэффициента замедления, который рассчитывает коэффициент замедления на основе соотношения между полученной движущей силой, скоростью и ускорением, при этом коэффициент замедления включает в себя коэффициент сопротивления воздуха, и блок расчета коэффициента замедления рассчитывает коэффициент сопротивления воздуха, когда условие движения транспортного средства удовлетворяет заданному условию.
[0012] Дополнительно, заданное условие для условия движения транспортного средства предпочтительно удовлетворяется, когда скорость транспортного средства выше пороговой.
[0013] Дополнительно, заданное условие для условия движения транспортного средства предпочтительно удовлетворяется, когда ускорение равно или ниже порогового.
[0014] Чтобы добиваться цели, описанной выше, изобретение предоставляет устройство расчета коэффициента замедления, рассчитывающее коэффициент замедления транспортного средства, это устройство включает в себя: блок запроса движущей силы, который получает движущую силу транспортного средства; блок запроса скорости, который получает скорость транспортного средства; блок запроса ускорения, который получает ускорение транспортного средства; и блок расчета коэффициента замедления, который рассчитывает коэффициент замедления на основе соотношения между полученной движущей силой, скоростью и ускорением, при этом коэффициент замедления включает в себя сопротивление движению, и блок расчета коэффициента замедления рассчитывает сопротивление движению, когда условие движения транспортного средства удовлетворяет заданному условию.
[0015] Дополнительно, заданное условие для условия движения транспортного средства предпочтительно удовлетворяется, когда скорость транспортного средства ниже пороговой.
[0016] Дополнительно, заданное условие для условия движения транспортного средства предпочтительно удовлетворяется, когда ускорение транспортного средства выше порогового.
[0017] Дополнительно, коэффициенты замедления предпочтительно включают в себя вес транспортного средства, коэффициент сопротивления воздуха и сопротивление движению, и блок расчета коэффициента замедления предпочтительно рассчитывает коэффициент замедления, который должен быть рассчитан, посредством анализа соотношения между коэффициентом замедления, движущей силой, скоростью и ускорением с помощью уравнения движения.
[0018] Дополнительно, блок расчета коэффициента замедления предпочтительно использует заданные значения для коэффициентов замедления, отличных от коэффициента замедления, который должен быть рассчитан, в уравнении движения.
[0019] С устройством расчета коэффициента замедления согласно изобретению коэффициент замедления может быть рассчитан с высокой степенью точности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
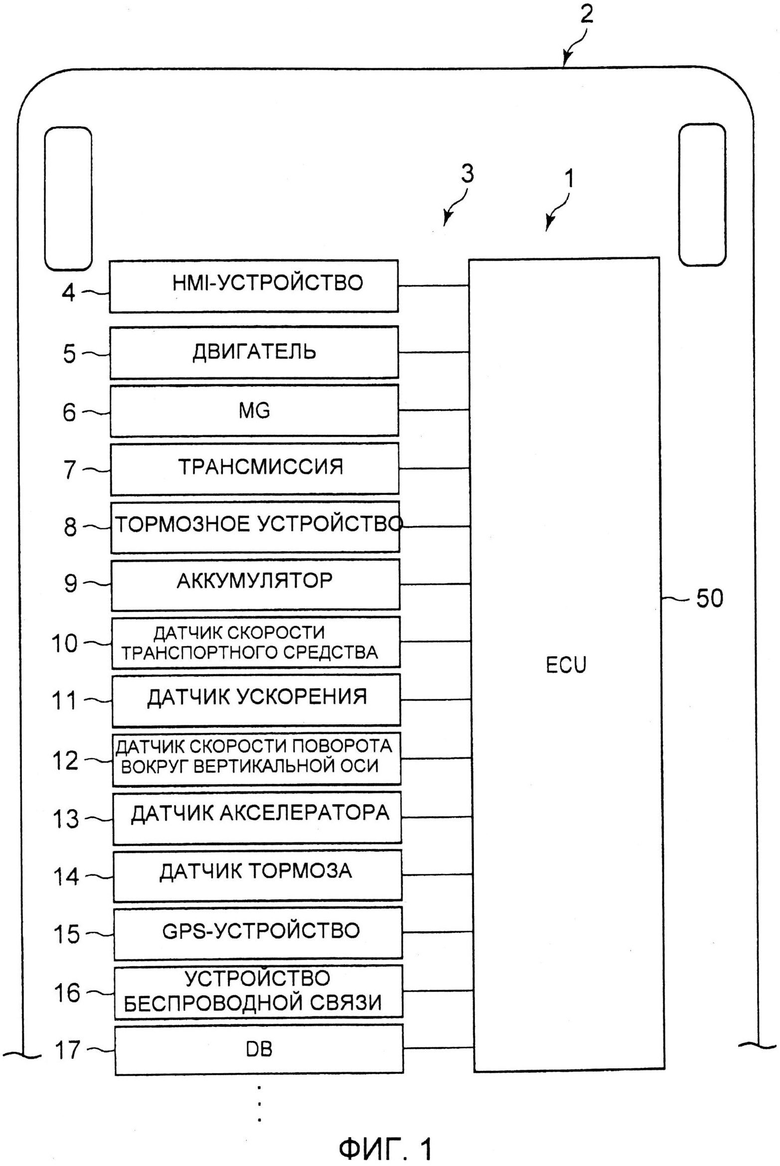
[0020] Фиг. 1 - это схематичный вид, показывающий конфигурацию системы управления транспортного средства.
Фиг. 2 - это схематичная блок-схема, показывающая пример конфигурации электронного блока управления (ECU) и устройства расчета коэффициента замедления.
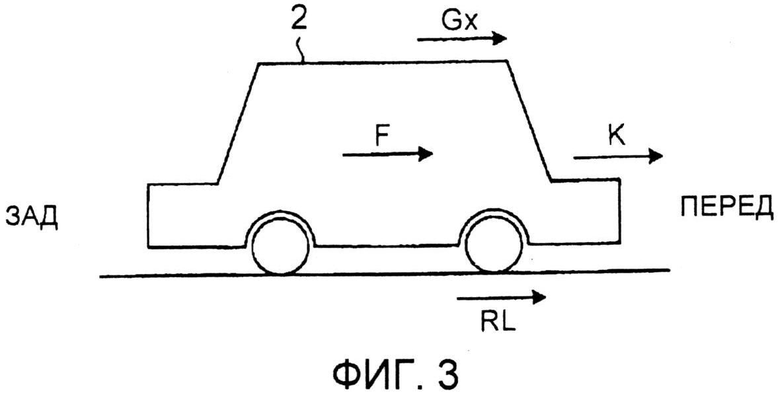
Фиг. 3 - это схематичный иллюстративный вид, показывающий силу, действующую на транспортное средство.
Фиг. 4 - это иллюстративный вид, показывающий соотношение между расчетным коэффициентом замедления, скоростью и ускорением.
Фиг. 5 - это блок-схема последовательности операций, показывающая пример управления, выполняемого посредством ECU.
Фиг. 6 - это иллюстративный вид, показывающий соотношение между результатом вычисления веса транспортного средства и временем.
Фиг. 7 - это иллюстративный вид, показывающий соотношение между результатом вычисления коэффициента сопротивления воздуха и временем.
Фиг. 8 - это иллюстративный вид, показывающий соотношение между результатом вычисления сопротивления движению и временем.
Фиг. 9 - это иллюстративный вид, показывающий соотношение между результатом вычисления движущей силы и временем.
Фиг. 10 - это иллюстративный вид, показывающий соотношение между результатом вычисления движущей силы и временем.
ВАРИАНТЫ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
[0021] Варианты осуществления изобретения подробно описываются ниже на основе чертежей. Следует отметить, что изобретение не ограничено этими вариантами осуществления. Дополнительно, составляющие элементы следующих вариантов осуществления включают в себя элементы, которые могут быть легко заменены специалистами в области техники, или, по существу, идентичные элементы.
[0022] [Первый вариант осуществления]
Фиг. 1 - это схематичный вид, показывающий конфигурацию системы управления транспортным средством согласно первому варианту осуществления, а Фиг. 2 - это схематичная блок-схема, показывающая пример конфигурации ECU и устройства расчета коэффициента замедления.
[0023] Как показано на Фиг. 1, устройство 1 расчета коэффициента замедления согласно этому варианту осуществления применяется к системе 3 управления транспортного средства, установленной в транспортном средстве 2. Устройство 1 расчета коэффициента замедления включает в себя ECU 50. Устройство 1 расчета коэффициента замедления рассчитывает коэффициент замедления посредством выполнения различных вычислений с помощью ECU 50 в соответствии с условиями. Условия движения транспортного средства 2 согласно этому варианту осуществления оцениваются посредством ECU 50 с помощью коэффициента замедления, рассчитанного посредством устройства 1 расчета коэффициента замедления, и различные типы помощи движению предоставляются для того, чтобы помогать движению транспортного средства 2 посредством управления устройством человеко-машинного интерфейса (HMI) (устройством помощи) 4, источником движения (двигателем 5, мотором/генератором (MG) 6) и т.п. на основе результата оценки.
[0024] Система 3 управления транспортным средством согласно этому варианту осуществления является так называемой гибридной системой, в которой источник приведения в движение для приведения в движение ведущего колеса транспортного средства 2, чтобы оно вращалось, состоит из комбинации двигателя 5 и MG 6. Другими словами, транспортное средство 2 является гибридным транспортным средством, включающим в себя MG 6 в качестве источника приведения в движение в дополнение к двигателю 5. Транспортное средство 2 сконфигурировано так, что улучшение в эффективности потребления топлива может быть достигнуто посредством работы двигателя 5 в условиях максимальной эффективности, компенсируя отсутствие и избыток в величине мощности и тормозном усилии двигателя с помощью MG 6, который является вращающейся электрической машиной и рекуперирует энергию во время торможения.
[0025] Более конкретно, система 3 управления транспортного средства включает в себя HMI-устройство 4, двигатель 5, который состоит из двигателя внутреннего сгорания, MG 6, который состоит из электромотора, трансмиссию 7, тормозное устройство 8, аккумулятор 9 и т.д. Система 3 управления транспортного средства также включает в себя датчик 10 скорости транспортного средства, датчик 11 ускорения, датчик 12 угловой скорости, датчик 13 акселератора, датчик 14 тормоза, устройство 15 глобальной системы позиционирования (GPS), устройство 16 беспроводной связи, базу 17 данных (DB) и т.д.
[0026] HMI-устройство 4 является устройством помощи, которое может выводить информацию помощи вождению, которая является информацией, используемой, чтобы помогать вождению транспортного средства 2. HMI-устройство 4 обеспечивает водителя информацией помощи вождению и т.д. HMI-устройство 4 является встроенным в транспортное средство устройством и включает в себя устройство отображения (устройство отображения визуальной информации), динамик (устройство вывода звука) и т.д., предусмотренные в салоне транспортного средства 2, например. Существующие устройства, такие как устройство отображения, динамик и т.п.системы навигации (NAVI), например, могут быть использованы, как есть, в качестве HMI-устройства 4. HMI-устройство 4 направляет операцию вождения, выполняемую водителем, предоставляя информацию, такую как голосовая информация и визуальная информация (графическая информация и буквенная информация), так что может быть достигнуто улучшение в эффективности использования топлива. Предоставляя эту информацию, HMI-устройство 4 помогает водителю в достижении целевых значений через его операции вождения. HMI-устройство 4 электрически соединяется с ECU 50 и управляется посредством ECU 50. Отметим, что HMI-устройство 4 может быть сконфигурировано, чтобы включать в себя устройство вывода информации, распознаваемой органами чувств, или т.п., которое выводит информацию, распознаваемую органами чувств, такую как, например, вибрация рулевого колеса, вибрация сиденья, сила реакции педали и т.п., например.
[0027] Двигатель 5, MG 6, трансмиссия 7, тормозное устройство 8, аккумулятор 9 и т.п. установлены в системе 3 управления транспортного средства в качестве различных приводных механизмов для реализации движения транспортного средства 2.
[0028] Двигатель 5 заставляет движущую силу действовать на колесо транспортного средства 2 в ответ на операцию запроса ускорения, - например, операцию нажатия на педаль акселератора, выполненную водителем. Двигатель 5 потребляет топливо, чтобы формировать крутящий момент двигателя, который служит в качестве энергии движения, прикладываемой к ведущему колесу транспортного средства 2. Другими словами, двигатель 5 представляет собой тепловой двигатель, который выводит тепловую энергию, сформированную посредством сжигания топлива, в форме механической энергии, такой как крутящий момент, и может состоять из бензинового двигателя, дизельного двигателя, двигателя на сжиженном природном газе (LPG) или т.п., например. Двигатель 5 включает в себя, например, устройство впрыска топлива, устройство зажигания, устройство дроссельной заслонки и т.д., не показанные на чертежах, и эти устройства электрически соединяются с ECU 50 так, чтобы управляться посредством ECU 50. Выходной крутящий момент от двигателя 5 управляется посредством ECU 50. Отметим, что энергия, формируемая двигателем 5, может быть использована во время генерирования энергии посредством MG 6.
[0029] MG 6 заставляет движущую силу действовать на колесо транспортного средства 2 в ответ на операцию запроса ускорения, например, операцию нажатия на педаль акселератора, выполненную водителем. MG 6 преобразует электрическую энергию в механическую энергию, чтобы формировать крутящий момент электромотора, который выступает в качестве энергии движения, прикладываемой к ведущему колесу транспортного средства 2. MG 6 является так называемой вращательной электрической машиной, имеющей статор в качестве неподвижного элемента и ротор в качестве вращающегося элемента. MG 6 является как электромотором, который преобразует электрическую энергию в механическую энергию и выводит механическую энергию, так и генератором энергии, который преобразует механическую энергию в электрическую энергию и накапливает электрическую энергию. Другими словами MG 6 функционирует и как электромотор, который приводится в действие посредством подачи энергии, чтобы преобразовывать электрическую энергию в механическую энергию и выводить механическую энергию (функция движения от энергии), так и как генератор энергии, который преобразует механическую энергию в электрическую энергию (функция рекуперации). MG 6 электрически соединяется с ECU 50 через инвертор или т.п., который выполняет преобразование между постоянным током и переменным током, и, таким образом, управляется посредством ECU 50. Выходной крутящий момент и величина генерируемой энергии MG 6 управляются посредством ECU 50 через инвертор.
[0030] Трансмиссия 7 является устройством передачи энергии, которое переключает по скорости выходную вращательную мощность, сформированную двигателем 5 и MG 6, и передает переключенную по скорости выходную вращательную мощность в сторону ведущего колеса транспортного средства 2. Трансмиссия 7 может быть так называемой механической трансмиссией (МТ) или так называемой автоматической трансмиссией (AT), такой как ступенчатая AT, бесступенчатой трансмиссией (CVT), многорежимной механической трансмиссией (ММТ), последовательной механической трансмиссией (SMT) или трансмиссией с двойным сцеплением (DCT). Предполагается в последующем описании, что трансмиссия 7 является CVT, применяющей планетарный зубчатый механизм и т.п., например. Актуатор трансмиссии или т.п. трансмиссии 7 электрически соединяется с ECU 50, так что трансмиссия 7 управляется посредством ECU 50.
[0031] Тормозное устройство 8 вынуждает тормозное усилие действовать на колесо транспортного средства 2 в ответ на операцию запроса торможения, например, операцию нажатия на педаль тормоза, выполненную водителем. Тормозное устройство 8 прикладывает тормозное усилие к колесу, которое поддерживается с возможностью вращения на кузове транспортного средства для транспортного средства 2, формируя предварительно определенную силу трения (силу сопротивления трения) между фрикционными элементами, такими как тормозные колодки или тормозные диски, например. При этом, тормозное устройство 8 создает тормозное усилие на поверхности контакта с землей колеса транспортного средства для транспортного средства 2, т.е. поверхности колеса транспортного средства, которая соприкасается с поверхностью дороги, и, в результате, торможение может применяться к транспортному средству 2. Тормозной актуатор или т.п. тормозного устройства 8 электрически соединяется с ECU 50, так что тормозное устройство 8 управляется посредством ECU 50.
[0032] Аккумулятор 9 представляет собой устройство накопления, которое может накапливать энергию (накопитель) и разряжать накопленную энергию. Аккумулятор 9 электрически соединяется с ECU 50 для того, чтобы выводить сигналы, относящиеся к различной информации, в ECU 50. Аккумулятор 9 согласно этому варианту осуществления обнаруживает SOC (состояние заряда) в качестве информации, указывающей состояние заряда, и выводит информацию в ECU 50.
[0033] Когда MG 6 функционирует как электромотор, энергия, накопленная в аккумуляторе 9, подается к нему через инвертор, после чего, MG 6 преобразует поданную энергию в энергию движения для транспортного средства 2 и выводит энергию движения. Когда MG 6 функционирует как генератор энергии, с другой стороны, MG 6 приводится во вращение посредством приводной мощности, чтобы генерировать энергию и заряжать аккумулятор 9 сгенерированной энергией через инвертор. В это время, тормоз может быть применен к вращению ротора MG 6 с помощью сопротивления вращению, сформированного в роторе (рекуперативное торможение). Следовательно, во время рекуперативного торможения, рекуперативный крутящий момент электромотора, который является отрицательным крутящим моментом электромотора, может быть сформирован в роторе MG 6 посредством рекуперации энергии, и, как результат, тормозное усилие может быть приложено к ведущему колесу транспортного средства 2. Другими словами, в системе 3 управления транспортного средства, механическая энергия подается к MG 6 от ведущего колеса транспортного средства 2, заставляя MG 6 генерировать энергию посредством рекуперации, и, в результате, кинетическая энергия транспортного средства 2 может аккумулироваться в качестве электрической энергии. Дополнительно, в системе 3 управления транспортным средством, механическая энергия (отрицательный крутящий момент электромотора), сгенерированная в роторе MG 6 во время операции, описанной выше, может быть передана ведущему колесу, и, в результате, рекуперативное торможение может выполняться посредством MG 6. В этом случае, тормозное усилие, созданное в системе 3 управления транспортного средства, уменьшается относительно, по мере того, как величина рекуперации (величина генерирования энергии) MG 6 относительно уменьшается, и, в результате, степень замедления, действующего на транспортное средство 2, относительно уменьшается. С другой стороны, тормозное усилие, сформированное в системе 3 управления транспортного средства, увеличивается относительно, по мере того, как величина рекуперации (величина генерирования энергии) MG 6 относительно увеличивается, и, в результате, степень замедления, действующего на транспортное средство 2, относительно увеличивается.
[0034] Датчик 10 скорости транспортного средства, датчик 11 ускорения, датчик 12 скорости поворота вокруг вертикальной оси, датчик 13 акселератора и датчик 14 тормоза являются устройствами обнаружения условий, которые обнаруживают условия движения транспортного средства и входные воздействия (входные воздействия от водителя), вводимые в транспортное средство 2 водителем, или, другими словами, точно определяют величины и физические величины, относящиеся к фактическим операциям, выполняемым водителем в транспортном средстве 2. Датчик 10 скорости транспортного средства обнаруживает скорость (также называемую "скоростью транспортного средства" далее в данном документе) транспортного средства 2. Датчик 11 ускорения обнаруживает ускорение транспортного средства 2. Отметим, что датчик 11 ускорения согласно этому варианту осуществления обнаруживает ускорение, по меньшей мере, в продольном направлении транспортного средства 2. Датчик 12 скорости поворота вокруг вертикальной оси обнаруживает скорость поворота вокруг вертикальной оси транспортного средства. Датчик 13 акселератора обнаруживает открытие акселератора, т.е. величину срабатывания (величину нажатия) педали акселератора водителем. Датчик 14 тормоза обнаруживает величину срабатывания (величину нажатия) педали тормоза водителем, например, давление главного цилиндра или т.п. Датчик 10 скорости транспортного средства, датчик 13 акселератора и датчик 14 тормоза электрически соединяются с ECU 50 для того, чтобы выводить сигналы обнаружения в ECU 50.
[0035] GPS-устройство 15 представляет собой устройство, которое обнаруживает текущее положение транспортного средства 2. GPS-устройство 15 принимает GPS-сигнал, выводимый GPS-спутником, и на основе принятого GPS-сигнала измеряет/вычисляет GPS-информацию (Х-координату; X, Y-координату; Y), выступающую в качестве информации, указывающей положение транспортного средства 2. GPS-устройство 15 электрически соединяется с ECU 50 для того, чтобы выводить сигнал, относящийся к GPS-информации, в ECU 50.
[0036] Устройство 16 беспроводной связи представляет собой устройство запроса информации упреждающего считывания, которое получает информацию упреждающего считывания, относящуюся к движению транспортного средства 2, с помощью беспроводной связи. Например, устройство 16 беспроводной связи использует беспроводную связь, чтобы получать информацию упреждающего считывания от устройства, которое обменивается информацией с помощью инфраструктуры связи, такой как Интернет, через устройство связи дорога - транспортное средство (придорожное устройство), такое как оптический маяк, расположенный на обочине, через устройство связи транспортное средство - транспортное средство, установленное на другом транспортном средстве, через центр системы информации и связи транспортных средств (VICS) (зарегистрированная торговая марка) или т.п. В качестве информации упреждающего считывания устройство 16 беспроводной связи получает, например, информацию о находящемся впереди транспортном средстве, информацию о находящемся позади транспортном средстве, информацию о сигнале светофора, информацию о дорожных работах/ограничении движения, информацию о заторе, информацию о транспортном средстве аварийной службы, информацию, относящуюся к базе данных истории происшествий, и т.д. Информация о сигнале светофора включает в себя, например, информацию, указывающую положение сигнала светофора впереди транспортного средства 2 в направлении движения, информацию о цикле сигнала светофора, указывающую цикл включения светового сигнала, момент переключения сигнала и т.д. зеленого света, желтого света и красного света и т.д. Устройство 16 беспроводной связи электрически соединяется с ECU 50 для того, чтобы выводить сигналы, относящиеся к информации упреждающего считывания, в ECU 50.
[0037] DB 17 хранит различную информацию. DB 17 хранит картографическую информацию, включающую в себя дорожную информацию, различную информацию, полученную и изученную во время фактического движения транспортного средства 2, информацию упреждающего считывания, полученную устройством 16 беспроводной связи, и т.д. Дорожная информация включает в себя, например, информацию об уклоне дороги, информацию о состоянии поверхности дороги, информацию о профиле дороги, информацию об ограничении скорости, информацию об изгибе (закруглении) дороги, информацию о временной остановке, информацию о положении стоп-линий и т.д. К информации, сохраненной в DB 17, надлежащим образом обращается ECU 50, вследствие чего требуемая информация считывается. Отметим, что здесь, как показано на чертеже, DB 17 устанавливается в транспортном средстве 2, но изобретение не ограничивается этим, и DB 17 может быть предусмотрена в информационном центре или т.п. снаружи транспортного средства 2. В этом случае, ECU 50 обращается к DB 17 подходящим образом по беспроводной связи или т.п., вследствие чего, требуемая информация считывается. DB 17 согласно этому варианту осуществления хранит, в качестве изученной информации, информацию, указывающую положение (фактическую позицию остановки), в котором транспортное средство 2 останавливается у светофора, перекрестка или т.п., оснащенного указанной позицией остановки, такой как стоп-линия. DB 17 хранит информацию о фактической позиции остановки для каждой указанной позиции остановки.
[0038] ECU 50 представляет собой блок управления, который выполняет общее управление системы 3 управления транспортного средства и состоит, например, из электронной схемы, имеющей традиционный микрокомпьютер, включающий в себя центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) и интерфейс в качестве основной части. Электрические сигналы, соответствующие результатам обнаружения, полученным посредством датчика 10 скорости транспортного средства, датчика 11 ускорения, датчика 12 угловой скорости, датчика 13 акселератора и датчика 14 тормоза, GPS-информации, полученной посредством GPS-устройства 15, информации упреждающего считывания, полученной посредством устройства 16 беспроводной связи, различной информации, сохраненной в DB 17, сигналам возбуждения, относящихся к соответствующим компонентам, управляющим командам и т.д., вводятся в ECU 50. ECU 50 управляет HMI-устройством 4, двигателем 5, MG 6, трансмиссией 7, тормозным устройством 8, аккумулятором 9 и т.д. в соответствии с входными электрическими сигналами и т.д. Например, ECU 50 выполняет управление приводом двигателя 5, управление приводом MG 6, управление переключением трансмиссии 7, управление торможением тормозного устройства 8 и т.п. на основе величины нажатия акселератора, скорости транспортного средства и т.д. Дополнительно, например, ECU 50 реализует различные типы движения транспортного средства (режимы движения) в транспортном средстве 2, применяя двигатель 5 и MG 6 либо вместе, либо выборочно в соответствии с условиями эксплуатации.
[0039] Кроме того, например, ECU 50 может обнаруживать включенное/выключенное состояние и величину нажатия акселератора при срабатывании акселератора, выступающие в качестве операции запроса ускорения, выданного водителем в отношении транспортного средства 2, на основе результата обнаружения, полученного посредством датчика 13 акселератора. Аналогично, например, ECU 50 может обнаруживать включенное/выключенное состояние при срабатывании тормоза, служащее в качестве операции запроса торможения, выданного водителем в отношении транспортного средства 2, на основе результата обнаружения, полученного посредством датчика 14 тормоза. Отметим, что, когда операция воздействия на акселератор, выполняемая водителем, находится в выключенном состоянии, это означает, что водитель отменил операцию запроса ускорения, относящуюся к транспортному средству 2, а когда операция воздействия на акселератор, выполняемая водителем, находится во включенном состоянии, это означает, что водитель выполняет операцию запроса ускорения, относящуюся к транспортному средству 2. Аналогично, когда операция воздействия на тормоз, выполняемая водителем, находится в выключенном состоянии, это означает, что водитель отменил операцию запроса торможения, относящуюся к транспортному средству 2, а когда операция воздействия на тормоз, выполняемая водителем, находится во включенном состоянии, это означает, что водитель выполняет операцию запроса торможения, относящуюся к транспортному средству 2. Дополнительно, ECU 50 обнаруживает запрошенную водителем мощность на основе величины нажатия акселератора.
[0040] Пример конфигурации ECU 50 будет описан в общих чертах ниже со ссылкой на блок-схему на Фиг. 2. Как показано на Фиг. 2, ECU 50 включает в себя блок 51 вычисления характеристик транспортного средства, блок 52 хранения и блок 53 управления помощью движению. Блок 1 вычисления характеристик транспортного средства и блок 52 хранения включаются в устройство 1 расчета коэффициента замедления. Устройство 1 расчета коэффициента замедления может включать в себя, в дополнение к ECU 50, различные датчики для обнаружения состояний транспортного средства и блоки получения различной информации для предоставления периферийной информации. Вместо различных датчиков для обнаружения состояний транспортного средства и блоков получения различной информации для предоставления периферийной информации, устройство 1 расчета коэффициента замедления может включать в себя блок связи, выступающий в качестве блока сбора данных, который получает информацию от различных датчиков для обнаружения состояний транспортного средства и от блоков получения различной информации для предоставления периферийной информации. Здесь, блок 51 вычисления характеристик транспортного средства и блок 53 управления помощью движению ECU 50 соединяются через локальную управляющую сеть (CAN) 56, которая спроектирована как сеть в транспортном средстве, с ECU актуаторов и различными датчиками для управления различными актуаторами, такими как ECU управления двигателем, ECU управления MG, ECU управления трансмиссией, ECU управления тормозом и ECU управления аккумулятором. Блок 51 вычисления характеристик транспортного средства и блок 3 управления помощью движению получают управляющие значения от различных актуаторов и обнаруженные значения от датчиков через CAN 56 в качестве информации о транспортном средстве.
[0041] Блок 51 вычисления характеристик транспортного средства вычисляет различные характеристики транспортного средства 2. В этом варианте осуществления блок 51 вычисления характеристик транспортного средства вычисляет коэффициент замедления транспортного средства 2. Более конкретно, блок 51 вычисления характеристик транспортного средства получает различную информацию через CAN 56 и рассчитывает коэффициент замедления транспортного средства 2, анализируя полученную информацию.
[0042] Блок 51 вычисления характеристик транспортного средства включает в себя блок 60 вычисления скорости транспортного средства (блок запроса скорости), блок 61 вычисления ускорения (блок запроса ускорения), блок 62 вычисления движущей силы (блок запроса движущей силы), блок 63 вычисления веса транспортного средства, блок 64 вычисления сопротивления воздуха, блок 65 вычисления сопротивления движению и блок 66 управления обработкой расчета. В устройстве 1 расчета коэффициента замедления блок 63 вычисления веса транспортного средства, блок 64 вычисления сопротивления воздуха, блок 65 вычисления сопротивления движению и блок 66 управления обработкой расчета блока 51 вычисления характеристик транспортного средства вместе составляют блок расчета коэффициента замедления. Блок 60 вычисления скорости транспортного средства, блок 61 вычисления ускорения и блок 62 вычисления движущей силы получают различные параметры, используемые для расчета коэффициента замедления.
[0043] Блок 60 вычисления скорости транспортного средства представляет собой блок вычисления, который получает скорость транспортного средства для транспортного средства 2. Блок 60 вычисления скорости транспортного средства может получать скорость транспортного средства для транспортного средства 2, получая обнаруженное значение датчика 10 скорости транспортного средства через CAN 56. Отметим, что блок 60 вычисления скорости транспортного средства может получать обнаруженное значение, полученное датчиком 10 скорости транспортного средства, как есть, в качестве скорости транспортного средства для транспортного средства 2 или может получать скорость транспортного средства для транспортного средства 2, выполняя процесс вычисления по обнаруженному значению датчика 10 скорости транспортного средства.
[0044] Блок 61 вычисления ускорения представляет собой блок вычисления, который получает ускорение транспортного средства 2. Блок 61 вычисления ускорения может получать ускорение транспортного средства 2, получая обнаруженное значение датчика 11 ускорения через CAN 56. Отметим, что блок 61 вычисления ускорения может получать обнаруженное значение, полученное посредством датчика 11 ускорения, как есть, в качестве скорости транспортного средства для транспортного средства 2 или может получать скорость транспортного средства для транспортного средства 2, выполняя процесс вычисления по обнаруженному значению датчика 11 ускорения. Дополнительно, блок 61 вычисления ускорения может вычислять ускорение без использования обнаруженного значения датчика 11 ускорения. Например, блок 61 вычисления ускорения может получать ускорение посредством дифференцирования скорости транспортного средства, обнаруженной посредством датчика 10 скорости транспортного средства.
[0045] Блок 62 вычисления движущей силы представляет собой блок вычисления, который получает движущую силу транспортного средства 2. Блок 62 вычисления движущей силы может получать движущую силу транспортного средства 2, получая обнаруженные значения, указывающие соответствующие состояния привода двигателя 5 и MG 6, через CAN 56 и вычисляя обнаруженные значения. Например, блок 62 вычисления движущей силы может вычислять движущую силу транспортного средства 2, вычисляя скорость вращения двигателя, выходную мощность MG 6 и т.п. на основе различных условий. Блок 62 вычисления движущей силы может также получать движущую силу, получая и вычисляя значения нагрузок (торможения двигателем, рекуперативного торможения), создаваемых двигателем 5 и MG 6, когда осуществляется замедление, но водитель не выполняет операцию торможения. Дополнительно, блок 62 вычисления движущей силы может получать обнаруженное значение датчика 13 акселератора или, другими словами, величину нажатия акселератора, через CAN 56 и получать движущую силу транспортного средства 2 из полученной величины нажатия акселератора.
[0046] Блок 63 вычисления веса транспортного средства представляет собой блок вычисления, который рассчитывает вес транспортного средства. Блок 64 вычисления сопротивления воздуха представляет собой блок вычисления, который рассчитывает коэффициент сопротивления воздуха. Блок 65 вычисления сопротивления движению представляет собой блок вычисления, который рассчитывает сопротивление движению. Вычисления, выполняемые блоком 63 вычисления веса транспортного средства, блоком 64 вычисления сопротивления воздуха и блоком 65 вычисления сопротивления движению, будут описаны ниже. Здесь, сопротивление движению (сопротивление перемещению) является сопротивлением, формируемым между источником приведения в движение и поверхностью дороги, и включает в себя сопротивление поверхности дороги, создаваемое между шиной и поверхностью дороги, сопротивление (механические потери), создаваемое приводной системой, которая передает движущую силу, созданную источником приведения в движение, и т.д. Следовательно, в блоке 51 вычисления характеристик транспортного средства согласно этому варианту осуществления, вес транспортного средства, коэффициент сопротивления воздуха и сопротивление движению, рассчитанные, соответственно, посредством блока 63 вычисления веса, блока 64 вычисления сопротивления воздуха и блока 65 вычисления сопротивления движению, выступают в качестве коэффициентов замедления.
[0047] Блок 66 управления обработкой расчета управляет процессом, выполняемым соответствующими блоками для блока 51 вычисления характеристик транспортного средства. Блок 66 управления обработкой расчета определяет, на основе скорости транспортного средства, полученной посредством блока 60 вычисления скорости транспортного средства, и ускорения, полученного посредством блока 61 вычисления ускорения, должен или нет блок 63 вычисления веса транспортного средства выполнять обработку, чтобы рассчитывать вес транспортного средства, должен или нет блок 64 вычисления сопротивления воздуха выполнять обработку, чтобы рассчитывать коэффициент сопротивления воздуха, и должен или нет блок 65 вычисления сопротивления движению выполнять обработку, чтобы рассчитывать сопротивление движению, и на основе этих определений выдает инструкцию соответствующим блокам выполнять обработку, чтобы рассчитывать различные коэффициенты замедления. Этот момент будет описан ниже.
[0048] Блок 52 хранения хранит значения, вычисленные посредством блока 51 вычисления характеристик транспортного средства, и значения, требуемые для различных вычислений. Бок 52 хранения хранит, по меньшей мере, вычисленные в настоящий момент расчетные значения коэффициентов замедления. Отметим, что в этом варианте осуществления блок 52 хранения предусматривается в ECU 50, но требуемая информация может быть сохранена в DB 17.
[0049] Блок 53 управления помощью движению является блоком вычисления, совместимым с интеллектуальными транспортными системами (ITS), например, и включает в себя блок вычисления для выполнения взаимодействия инфраструктуры и NAVI-взаимодействия. Блок 53 управления помощью движению выполняет обработку помощи эко-вождению с информацией упреждающего считывания с помощью так называемой информации упреждающего считывания. Другими словами, в системе 3 управления транспортного средства блок 53 управления помощью вождению помогает эко-вождению, применяя информацию упреждающего считывания, чтобы реализовывать вождение, имеющее превосходный результат улучшения эффективности потребления топлива. В результате, система 3 управления транспортного средства может сдерживать потребление топлива так, чтобы добиваться улучшения в эффективности потребления топлива. Чтобы помогать эко-вождению, выполняемому водителем, блок 53 управления помощью движению выводит информацию помощи вождению в HMI-устройство 4 для того, чтобы направлять действия, выполняемые водителем. В качестве дополнительной помощи движению блок 53 управления помощи движению включает и выключает двигатель, когда движение прекращается.
[0050] Блок 53 помощи движению получает информацию, указывающую будущий маршрут движения транспортного средства 2, на основе различной информации, полученной через CAN 56, например, позиционной информации, полученной посредством GPS-устройства 15, цикла сигналов светофора, через который проезжает транспортное средство 2, полученного посредством устройства 16 беспроводной связи, и т.д. Дополнительно, блок 53 управления помощью движению получает текущие условия движения (скорость транспортного средства, оставшаяся емкость аккумулятора и т.д.) через CAN 56. Блок 53 управления помощью движению может затем выполнять помощь движению с помощью информации, указывающей будущий маршрут движения и текущие условия движения транспортного средства 2, и с помощью соответствующих коэффициентов замедления, вычисленных посредством устройства 1 расчета коэффициента замедления.
[0051] Блок 53 управления помощью движению выполняет различные типы помощи движению, управляя двигателем 5 в соответствии с условиями, и при этом предоставляет помощь в реализации движения, которое имеет превосходный результат улучшения эффективности потребления топлива и является комфортным для водителя. Более конкретно, блок 53 управления помощью движению получает информацию, указывающую позицию остановки на светофоре, перекрестке или т.п., и определяет, необходимо или нет останавливаться в направлении движения. Определив остановку транспортного средства 2, блок 53 управления помощью движению точно определяет целевую позицию остановки из информации, указывающей положение стоп-линий светофора, перекрестка или т.п., и управляет включенным/выключенным состоянием двигателя 5 на основе скорости движения движущегося транспортного средства 2, расстояния до представленной целевой позиции остановки и запрошенной водителем подводимой мощности в соответствии с операцией, выполняемой водителем.
[0052] Кроме того, блок 53 управления помощью движению предлагает водителю выполнять вождение, имеющее превосходный результат улучшения эффективности потребления топлива, управляя HMI-устройством 4 в соответствии с такими условиями, чтобы выводить различную информацию помощи вождению. Блок 53 управления помощью вождению выдает руководство, чтобы предлагать водителю выполнять рекомендованную операцию вождения, типично, операцию вождения, сопровождающую изменение, инструктируя HMI-устройство 4 выводить различную информацию помощи вождению на основе целевого количественного параметра состояния движения движущегося транспортного средства 2. Здесь, целевой количественный параметр состояния движения типично является целевым количественным параметром состояния движения транспортного средства 2 в предварительно определенном местоположении движущегося транспортного средства 2 или в предварительно определенный момент времени. Блок 53 управления помощью движению выполняет помощь, чтобы предлагать водителю выполнять рекомендованную операцию вождения, управляя HMI-устройством 4 на основе целевого количественного параметра состояния движения в предварительно определенном местоположении или предварительно определенный момент времени так, что информация помощи вождению выводится из HMI-устройства 4, и при этом предоставляет помощь вождению для обеспечения того, чтобы количественный параметр состояния движения транспортного средства 2 соответствовал целевому количественному параметру состояния движения в предварительно определенном местоположении и моменте времени.
[0053] Далее, с помощью Фиг. 3-10, будет описан пример обработки, выполняемой устройством 1 расчета коэффициента замедления. Сначала будут описаны коэффициенты замедления, рассчитываемые посредством устройства 1 расчета коэффициента замедления. Фиг. 3 представляет собой схематичный иллюстративный вид, показывающий силу, действующую на транспортное средство. Когда сила, действующая на транспортное средство 2 во время движения, применяется к уравнению движения, получается Уравнение 1, показанное ниже.
[0054] [Мат. 1]

[0055] Здесь, F - это движущая сила, Gx - это ускорение, М - это вес транспортного средства, К - коэффициент сопротивления воздуха, Vx - скорость транспортного средства, a RL - сопротивление движению. Отметим, что, когда транспортное средство 2 движется вперед со скоростью Vx транспортного средства, соответствующие параметры вышеприведенного уравнения имеют нормальную ориентацию, как указано стрелками на Фиг. 3. Дополнительно, когда движущая сила F создается посредством источника приведения в движение транспортного средства 2 во время движения, сопротивление воздуха и сопротивление движению, в основном, создаются в противоположном направлении по отношению к направлению движущей силы F транспортного средства 2 или, другими словами, в направлении замедления транспортного средства 2, и, следовательно, значения К и RL, в основном, являются отрицательными значениями. Кроме того, когда вес М увеличивается, ускорение уменьшается.
[0056] Определяя четыре из пяти членов в Уравнении 1, устройство 1 расчета коэффициента замедления может вычислять значение оставшегося члена. Здесь, ускорение Gx, скорость Vx транспортного средства и движущая сила F из членов в вышеприведенном уравнении, являются членами, которые могут быть получены посредством получения или вычисления соответствующих обнаруженных значений транспортного средства. Следовательно, определяя значения двух коэффициентов замедления среди веса М транспортного средства, коэффициента К сопротивления и сопротивления RL движению, устройство 1 расчета коэффициента замедления может рассчитывать значение оставшегося коэффициента замедления.
[0057] Здесь, блок 66 управления обработкой расчета устройства 1 расчета коэффициента замедления согласно этому варианту осуществления определяет выражение коэффициента замедления, который должен быть рассчитан, на основе ускорения Gx и скорости Vx транспортного средства. Другими словами, когда ускорение Gx и скорость Vx транспортного средства удовлетворяют предварительно определенному условию, блок 66 управления обработкой расчета выполняет обработку, чтобы рассчитывать коэффициент замедления, который удовлетворяет условию. Когда ускорение Gx и скорость V транспортного средства не удовлетворяют условию расчета коэффициента замедления, следовательно, блок 66 управления обработкой расчета не выполняет обработку расчета коэффициента замедления.
[0058] Фиг. 4 - это иллюстративный вид, показывающий соотношение между коэффициентом замедления, который должен быть рассчитан, скоростью и ускорением. На Фиг. 4 ускорение Gx [м/с2] показано на ординате, а скорость Vx транспортного средства [км/ч] показана на абсциссе. Дополнительно, ускорение Ga. и скорость Va служат в качестве пороговых значений. Например, ускорение Ga и скорость Va могут быть заданы равными 1,0 и 50,0, соответственно.
[0059] Когда ускорение Gx выше Ga, а скорость Vx транспортного средства ниже Va, блок 66 управления обработкой расчета рассчитывает вес M1 транспортного средства среди коэффициентов замедления. Здесь, M1 является расчетным весом транспортного средства. Вес M1 транспортного средства вычисляется с помощью Уравнения 2, показанного ниже.
[0060] [Мат. 2]
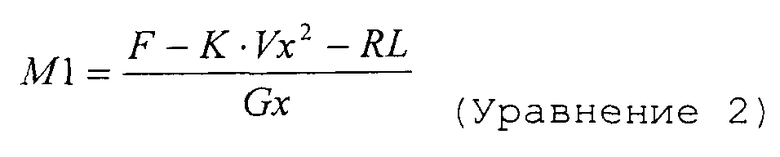
[0061] Когда ускорение Gx выше Ga, а скорость Vx транспортного средства ниже Va, член Vx2 меньше члена ускорения Gx, и, следовательно, влияние члена Vx2 вышеприведенного уравнения уменьшается. Дополнительно, поскольку ускорение Gx выше Ga, RL имеет относительно небольшое влияние. Следовательно, когда ускорение Gx выше Ga, а скорость Vx транспортного средства ниже Va, блок 66 управления обработкой расчета может рассчитывать вес М1 транспортного средства, в то же время уменьшая влияния ошибок в других коэффициентах замедления. К и RL принимают вычисленные в настоящее время расчетные значения (предыдущие значения), считанные из блока 52 хранения.
[0062] Когда ускорение Gx ниже Ga, а скорость Vx транспортного средства выше Va, блок 66 управления обработкой расчета рассчитывает коэффициент К1 сопротивления воздуха среди коэффициентов замедления. Здесь, К1 является расчетным коэффициентом сопротивления воздуха. Коэффициент К1 сопротивления воздуха вычисляется с помощью Уравнения 3, показанного ниже.
[0063] [Мат. 3]
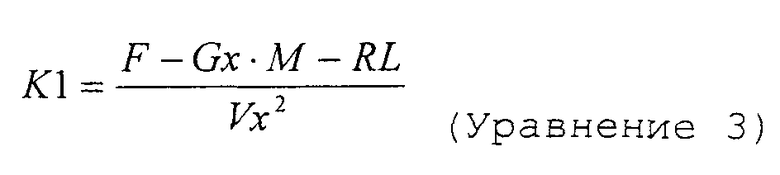
[0064] Когда ускорение Gx ниже Ga, а скорость Vx транспортного средства выше Va, влияние члена Gx в вышеприведенном уравнении на член Vx2 уменьшается. Дополнительно, поскольку скорость Vx транспортного средства выше Va, RL также имеет относительно небольшое влияние. Следовательно, когда ускорение Gx ниже Ga, а скорость Vx транспортного средства выше Va, блок 66 управления обработкой расчета может рассчитывать коэффициент К1 сопротивления воздуха, в то же время уменьшая влияния ошибок в других коэффициентах замедления. М и RL принимают вычисленные в настоящее время расчетные значения (предыдущие значения), считанные из блока 52 хранения.
[0065] Когда ускорение Gx ниже Ga, и скорость Vx транспортного средства ниже Va, блок 66 управления обработкой расчета рассчитывает сопротивление RL1 движению среди коэффициентов замедления. Здесь, RL1 является расчетным сопротивлением движению. Сопротивление RL1 движению вычисляется с помощью Уравнения 4, показанного ниже.
[0066] [Мат. 4]

[0067] Когда ускорение Gx ниже Ga, и скорость Vx транспортного средства ниже Va, и член Vx2, и член Gx имеют уменьшенное влияние на F. Следовательно, когда ускорение Gx ниже Ga, и скорость Vx транспортного средства ниже Va, блок 66 управления обработкой расчета может рассчитывать сопротивление RL1 движению, в то же время уменьшая влияния ошибок в других коэффициентах замедления. М и К принимают вычисленные в настоящее время расчетные значения (предыдущие значения), считанные из блока 52 хранения.
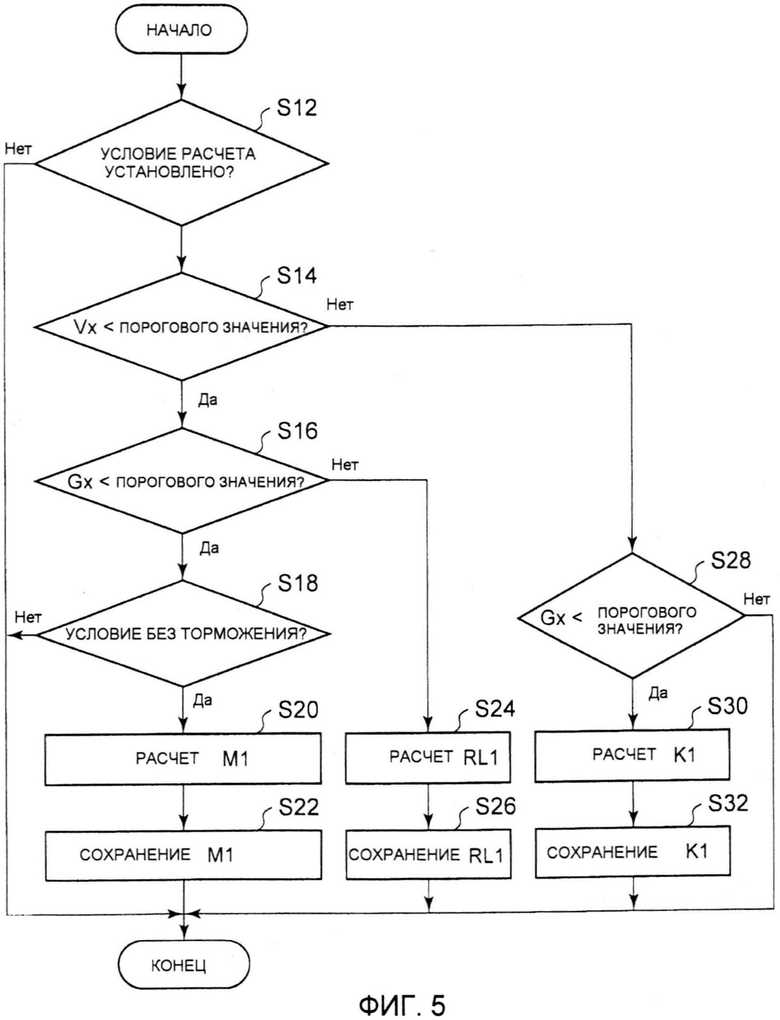
[0068] Далее, с помощью Фиг. 5, будет описан пример процедур обработки, выполняемых блоком 66 управления обработкой расчета. Фиг. 5 - это блок-схема последовательности операций, показывающая пример управления, выполняемого посредством ECU 50. Блок 66 управления обработкой расчета может выполнять обработку, показанную на Фиг. 5, выполняя различные определения обработки на основе значений, вычисленных посредством соответствующих блоков блока 51 вычисления характеристик транспортного средства, и состояний транспортного средства 2, полученных из CAN 56, для того, чтобы управлять операциями соответствующих блоков блока 51 вычисления характеристик транспортного средства.
[0069] На этапе 312 блок 66 управления обработкой расчета определяет, установлено или нет условие расчета. Здесь, условие расчета определяется на основе позиции рычага переключения передач, скорости транспортного средства и угловой скорости. Отметим, что положение рычага переключения передач может быть получено посредством обнаружения состояния трансмиссии 7 через CAN 56. Блок 66 управления обработкой расчета определяет, что условие расчета установлено, когда все условия, согласно которым положение рычага переключения передач является положением приведения в движение, скорость Vx транспортного средства выше 0 (0 < V), и угловая скорость YR меньше порогового значения (YR < порогового значения), удовлетворяются. Другими словами, блок 66 управления обработкой расчета определяет, что условие расчета установлено, когда передача движущей силы от источника приведения в движение выполняется, и транспортное средство 2 находится в движении, но не поворачивает со скоростью выше пороговой. Когда блок 66 управления обработкой расчета определяет на этапе 312, что условие расчета не удовлетворяется (Нет), текущая обработка завершается.
[0070] После определения на этапе S12, что условие расчета установлено (Да), блок 66 управления обработкой расчета определяет на этапе S14, установлено или нет условие, что скорость Vx транспортного средства < порогового значения, или, другими словами, меньше или нет скорость Vx транспортного средства порогового значения (скорости Va, например). Блок 66 управления обработкой расчета переходит к этапу S16 после определения на этапе S14, что условие того, что скорость Vx транспортного средства < порогового значения, установлено (Да), и переходит к этапу 328 после определения, что условие того, что скорость Vx транспортного средства<порогового значения, не установлено (Нет), или, другими словами, установлено условие, что скорость Vx транспортного средства ≥ порогового значения.
[0071] После положительного определения на этапе S14, блок 66 управления обработкой расчета определяет на этапе S16, установлено или нет условие, что ускорение Gx < порогового значения, или, другими словами, меньше или нет ускорение Gx, чем пороговое значение (ускорение Ga, например). Блок 66 управления обработкой расчета переходит к этапу S18 после определения на этапе S16, что условие того, что ускорение Gx < порогового значения, установлено (Да), и переходит к этапу 324 после определения, что условие того, что ускорение Gx < порогового значения, не установлено (Нет), или, другими словами, установлено условие, что ускорение Gx>пороговому значению.
[0072] После положительного определения на этапе S16 блок 66 управления обработкой расчета определяет на этапе S18, установлено или нет состояние без торможения. Другими словами, блок 66 управления обработкой расчета определяет, была или нет операция торможения обнаружена посредством датчика 14 тормоза. После определения на этапе S18 того, что состояние без торможения не установлено (Нет), или, другими словами, что операция торможения была обнаружена посредством датчика тормоза, блок 66 управления обработкой расчета завершает текущую обработку. Другими словами, когда выполняется операция торможения, блок 66 управления обработкой расчета завершает текущую обработку без выполнения расчета. После определения на этапе S18 того, что состояние без торможения установлено (Да), или, другими словами, что операция торможения не была обнаружена посредством датчика тормоза, блок 66 управления обработкой расчета рассчитывает вес М1 транспортного средства на этапе S20. Здесь, вес М1 транспортного средства рассчитывается посредством блока 63 вычисления веса транспортного средства с помощью вышеприведенного уравнения. После того как вес М1 транспортного средства был рассчитан на этапе S20, блок 66 управления обработкой расчета сохраняет рассчитанный вес М1 транспортного средства в блоке 52 хранения на этапе 322, после чего, текущая обработка завершается.
[0073] После отрицательного определения на этапе 316, блок 66 управления обработкой расчета рассчитывает сопротивление RL1 движению на этапе 324. Здесь, сопротивление RL1 движению рассчитывается посредством блока 65 вычисления сопротивления движению с помощью вышеприведенного уравнения. После того как сопротивление RL1 движению было рассчитано на этапе 324, блок 66 управления обработкой расчета сохраняет сопротивление RL1 движению в блоке 52 хранения на этапе 326, после чего, текущая обработка завершается.
[0074] После отрицательного определения на этапе 314, блок 66 управления обработкой расчета определяет на этапе 328, установлено или нет условие, что ускорение Gx < порогового значения, или, другими словами, меньше или нет ускорение Gx, чем пороговое значение (ускорение Ga, например). После определения на этапе 328, что условие того, что ускорение Gx < порогового значения, не установлено (Нет), или, другими словами, что установлено условие, что ускорение Gx > порогового значения, блок 66 управления обработкой расчета завершает текущую обработку.
[0075] После определения на этапе 328, что условие того, что ускорение Gx<порогового значения, установлено (Да), блок 66 управления обработкой расчета рассчитывает коэффициент К3-сопротивления воздуха на этапе S30. Здесь, коэффициент К1 сопротивления воздуха рассчитывается посредством блока 64 вычисления сопротивления воздуха с помощью вышеприведенного уравнения. После того как коэффициент К1 сопротивления воздуха был рассчитан на этапе S30, блок 66 управления обработкой расчета сохраняет коэффициент К1 сопротивления воздуха в блоке 52 хранения на этапе S32 и затем завершает текущую обработку.
[0076] Меняя коэффициент замедления, который должен быть рассчитан на основе скорости Vx транспортного средства и ускорения Gx, устройство 1 расчета коэффициента замедления может вычислять вес М1 транспортного средства, коэффициент К1 сопротивления воздуха и сопротивление RL1 движению, выступающие в качестве объектов расчета, соответственно, в условиях, когда воздействия от других коэффициентов замедления уменьшаются. В результате, устройство 1 расчета коэффициента замедления может вычислять соответствующие коэффициенты замедления с более высокой степенью точности. Когда устройство 1 расчета коэффициента замедления рассчитывает вес М1 транспортного средства, коэффициент К1 сопротивления воздуха и сопротивление RL1 движению, выступающие в качестве объектов расчета, воздействие ошибок, включенных в другой коэффициент замедления, может быть уменьшено. В результате, возможность ошибки в рассчитанном коэффициенте замедления вследствие воздействий от других коэффициентов замедления может быть уменьшена.
[0077] Дополнительно, меняя коэффициент замедления, который должен быть рассчитан на основе скорости Vx транспортного средства и ускорения Gx, устройство 1 расчета коэффициента замедления может предотвращать ситуацию, в которой рассчитанные значения веса М1 транспортного средства, коэффициента К1 сопротивления воздуха и сопротивления RL1 движению включают в себя значения, вычисленные в состоянии, когда воздействия других коэффициентов замедления являются большими. В результате, возможность ошибки в расчетном коэффициенте замедления вследствие воздействий от других коэффициентов замедления может быть уменьшена, и, следовательно, коэффициенты замедления могут быть рассчитаны с высокой степенью точности.
[0078] Здесь, устройство 1 расчета коэффициента замедления, когда выполняет расчет коэффициента замедления, предпочтительно вычисляет скорректированное расчетное значение, принимая во внимание прошлое расчетное значение вычисленного расчетного значения. Дополнительно, устройство 1 расчета коэффициента замедления предпочтительно использует скорректированное расчетное значение в качестве значения коэффициента замедления, используемого другим устройством, таким как блок 53 управления помощью движению. Например, скорректированное расчетное значение веса М1 транспортного средства предпочтительно вычисляется с помощью Уравнения 5, показанного ниже.
[0079] [Мат. 5]

[0080] М1_F - это скорректированное расчетное значение, M1n-1 - предыдущее расчетное значение, а M1n - текущее расчетное значение. Дополнительно, kk является весовым коэффициентом. Отметим, что, когда вычисляется скорректированное расчетное значение M1_F веса транспортного средства, временная константа фильтра предпочтительно задается в качестве краткосрочного фильтра. Например, предпочтительно используется временная константа фильтра, имеющая период в 60 с.
[0081] Фиг. 6 показывает соотношение между вычисленными М1 и М1_F. Фиг. 6 - это иллюстративный вид, показывающий соотношение между результатом вычисления веса транспортного средства и временем. Отметим, что пример, показанный на Фиг. 6, является примером случая, в котором М1 равен 1800 кг. Как показано на Фиг. 6, устройство 1 расчета коэффициента замедления может вычислять расчетное значение, имеющее более высокую степень точности, вычисляя скорректированное расчетное значение М1_F, которое получается посредством корректировки текущего расчетного значения с помощью предыдущего расчетного значения.
[0082] Дополнительно, скорректированное расчетное значение K1_F коэффициента К1 сопротивления воздуха предпочтительно вычисляется с помощью Уравнения 6, показанного ниже.
[0083] [Мат. 6]

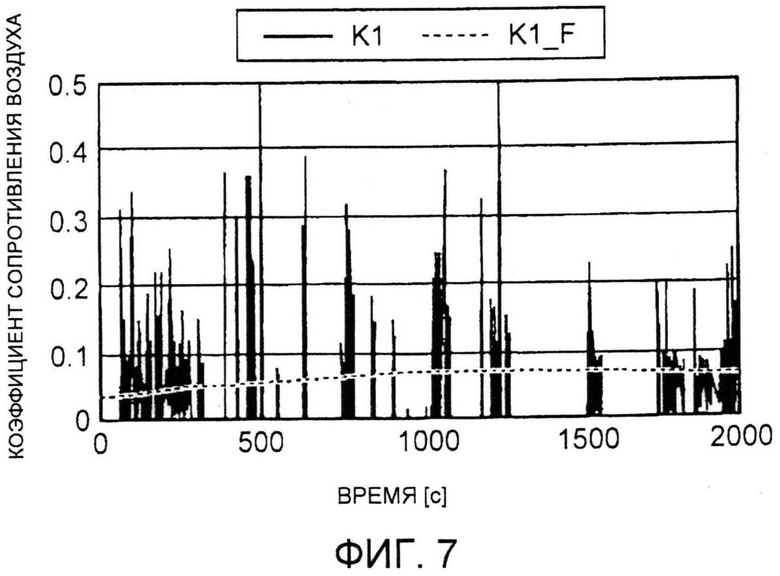
[0084] K1_F - это скорректированное расчетное значение, K1n-1 - предыдущее расчетное значение, a K1n - текущее расчетное значение. Дополнительно, kk является весовым коэффициентом. Отметим, что, когда вычисляется скорректированное расчетное значение K1_F коэффициента сопротивления воздуха, временная константа фильтра предпочтительно задается в качестве долговременного фильтра. Например, предпочтительно используется временная константа фильтра, имеющая период в 600 с.
[0085] Фиг. 7 показывает соотношение между вычисленным К1 и K1_F. Фиг. 7 - это иллюстративный вид, показывающий соотношение между результатом вычисления коэффициента сопротивления воздуха и временем. Как показано на Фиг. 7, устройство 1 расчета коэффициента замедления может вычислять расчетное значение, имеющее более высокую степень точности, вычисляя скорректированное расчетное значение K1_F, которое получается посредством корректировки текущего расчетного значения с помощью предыдущего расчетного значения.
[0086] Кроме того, скорректированное расчетное значение сопротивления RL1 движению предпочтительно вычисляется с помощью Уравнения 7, показанного ниже.
[0087] [Мат. 7]

[0088] RL1_F - это скорректированное расчетное значение, RL1n-1 - это предыдущее расчетное значение, a RL1n - текущее расчетное значение. Дополнительно, kk является весовым коэффициентом. Отметим, что, когда вычисляется скорректированное расчетное значение RL1_F сопротивления движению, временная константа фильтра предпочтительно задается в качестве среднесрочного фильтра. Например, предпочтительно используется временная константа фильтра, имеющая период в 300 с.
[0089] Фиг. 8 показывает соотношение между вычисленными RL1 и RL1_F. Фиг. 8 - это иллюстративный вид, показывающий соотношение между результатом вычисления сопротивления движению и временем. Как показано на Фиг. 8, устройство 1 расчета коэффициента замедления может вычислять расчетное значение, имеющее более высокую степень точности, вычисляя скорректированное расчетное значение RL1_F, которое получается посредством корректировки текущего расчетного значения с помощью предыдущего расчетного значения.
[0090] Как показано на Фиг. 6-8 и в Уравнениях 5-7, устройство 1 расчета коэффициента замедления может вычислять расчетные значения, имеющие более высокую степень точности, корректируя расчетные значения. Дополнительно, задавая временные константы фильтра, используемые для соответствующих коэффициентов замедления, в различные временные константы при вычислении расчетных значений, могут быть вычислены расчетные значения, имеющие даже более высокую степень точности.
[0091] При корректировке расчетного значения веса транспортного средства, устройство 1 расчета коэффициента замедления может выполнять корректировки, соответствующие коэффициентам колебания веса транспортного средства, реализуя фильтрующую обработку с помощью фильтра короткого периода. Более конкретно, корректировки могут быть выполнены в ответ на изменение, возникающее в течение короткого периода, такое как изменение в числе пассажиров и перемещение перевозимого груза.
[0092] При корректировке расчетного значения коэффициента сопротивления воздуха, устройство 1 расчета коэффициента замедления может выполнять корректировки, соответствующие коэффициентам колебания коэффициента сопротивления воздуха, реализуя обработку фильтром с помощью фильтра длительного периода. Более конкретно, корректировки могут быть выполнены в ответ на изменение, возникающее в течение длительного периода, такое как замена обвеса и других деталей экстерьера транспортного средства, или, другими словами, изменение, которое, однажды случившись, значительно не изменяется в течение длительного времени.
[0093] Далее, будет описан случай, в котором движущая сила вычисляется с помощью уравнения движения, которое принимает во внимание коэффициенты замедления, описанные выше. Фиг. 9 - это иллюстративный вид, показывающий соотношение между результатом вычисления движущей силы и временем. На Фиг. 9 движущая сила [Н] показана на ординате, а время [с] показано на абсциссе. Дополнительно, Фиг. 9 показывает движущую силу (движущую силу транспортного средства) F, вычисленную посредством измерения, и движущую силу (Gx×М+К×V2+RL), вычисленную посредством вставки соответствующих значений в правую сторону Уравнения 1. Здесь, Gx×М+К×V2+RL, показанное на Фиг. 9, вычисляется с помощью стандартного веса как М, стандартного коэффициента сопротивления воздуха как К, стандартного сопротивления движению как RL, обнаруженного значения датчика 11 ускорения как Gx и обнаруженного значения датчика 10 скорости транспортного средства как V. Здесь, стандартный коэффициент К сопротивления воздуха вычисляется из плотности ρ воздуха × спроецированная площадь S поверхности для передней поверхности × коэффициент cd сопротивления воздуха. Дополнительно, стандартное сопротивление RL движению вычисляется из сопротивления Rr качению шины и механических потерь Mr транспортного средства. Другими словами, Фиг. 9 показывает состояние, в котором коэффициенты замедления являются постоянными, или, другими словами, случай, в котором движущая сила вычисляется с помощью, по существу, точных значений коэффициентов замедления.
[0094] Как показано на Фиг. 9, вычисляя движущую силу из уравнения с помощью коэффициентов замедления, вычисленных с высокой степенью точности, может быть вычислено значение, которое близко к фактической движущей силе. Следовательно, устройство 1 расчета коэффициента замедления согласно этому варианту осуществления может вычислять движущую силу, которая близка к фактическому значению, рассчитывая коэффициенты замедления с высокой степенью точности. Устройство 1 расчета коэффициента замедления может вычислять соотношение между движущей силой, ускорением и скоростью во время движения точно посредством повышения точности выражений коэффициентов замедления в Уравнении 1. В результате, когда характер движения транспортного средства прогнозируется во время помощи движению, характер движения может быть спрогнозирован точно. Прогнозируя характер движения точно, помощь движению может выполняться более надлежащим образом.
[0095] Здесь, когда используется обнаруженное значение датчика 11 ускорения, устройство 1 расчета коэффициента замедления предпочтительно использует значение, полученное посредством корректировки обнаруженного значения с помощью низкочастотного фильтра в качестве ускорения. Другими словами, предпочтительно используется ускорение G×F, скорректированное в соответствии с Уравнением 8, показанным ниже.
[0096] [Мат. 8]

[0097] Здесь, Фиг. 10 - это иллюстративный вид, показывающий соотношение между результатом вычисления движущей силы и временем. На Фиг. 10 движущая сила [Н] показана на ординате, а время [с] показано на абсциссе. Дополнительно, Фиг. 10 показывает движущую силу F, вычисленную посредством измерения, и движущую силу (G×F×М+К×V2+RL), вычисленную посредством вставки соответствующих значений в правую сторону Уравнение 1. Другими словами, на Фиг. 10, значение, из которого высокочастотная составляющая была удалена с помощью низкочастотного фильтра, используется в качестве ускорения в движущей силе, вычисленной посредством вставки соответствующих значений в правую сторону Уравнения 1. Применяя значение, из которого высокочастотная составляющая была удалена, как показано на Фиг. 10, устройство 1 расчета коэффициента замедления может рассчитывать коэффициенты замедления с помощью значений, из которых была удалена составляющая шума. В результате, коэффициенты замедления могут быть рассчитаны с даже более высокой степенью точности.
[0098] Устройство 1 расчета коэффициента замедления согласно этому варианту осуществления может вычислять коэффициенты замедления с более высокой степенью точности, вычисляя все три коэффициента замедления, а именно, вес транспортного средства, коэффициент сопротивления воздуха и сопротивление движению, посредством расчета. Здесь, устройство 1 расчета коэффициента замедления не ограничивается вычислением всех трех коэффициентов замедления, а именно, веса транспортного средства, коэффициента сопротивления воздуха и сопротивления движению, посредством расчета. Вместо этого, устройство 1 расчета коэффициента замедления может рассчитывать только два или только один из веса транспортного средства, коэффициента сопротивления воздуха и сопротивления движению. Отметим, что предварительно заданные фиксированные значения или проектные значения используются для значений, которые не рассчитываются. Переключаясь между расчетом коэффициента сопротивления воздуха и расчетом сопротивления движению в соответствии с условиями движения, устройство 1 расчета коэффициента замедления может рассчитывать коэффициенты замедления даже с более высокой степенью точности.
[0099] Устройство 1 расчета коэффициента замедления определяет, рассчитывать или нет соответствующие коэффициенты замедления с помощью ускорения и скорости в качестве опорных условий движения, но определение ориентира для определения того, рассчитывать или нет соответствующие коэффициенты замедления, не ограничивается этим, и устройство 1 расчета коэффициента замедления может определять, рассчитывать или нет соответствующие коэффициенты замедления с помощью только одного из ускорения и скорости в качестве опорного условия движения. Дополнительно, устройство 1 расчета коэффициента замедления может определять, предоставлять или нет помощь движению, с помощью движущей силы в качестве опорного условия движения.
[0100] Устройство 1 расчета коэффициента замедления переключается между расчетом веса транспортного средства и расчетом сопротивления движению с помощью одного порогового значения (ускорения) в качестве ориентира и переключается между расчетом коэффициента сопротивления воздуха и расчетом сопротивления движению с помощью одного порогового значения (ускорения) в качестве ориентира. Однако устройство 1 расчета коэффициента замедления не ограничивается этим и может использовать различные ускорения в качестве порогового значения для определения того, рассчитывать или нет вес транспортного средства, и порогового значения для определения того, рассчитывать или нет сопротивление движению. Устройство 1 расчета коэффициента замедления может также использовать различные скорости в качестве порогового значения для определения того, рассчитывать или нет коэффициент сопротивления воздуха, и порогового значения для определения того, рассчитывать или нет сопротивление движению. Кроме того, устройство 1 расчета коэффициента замедления может рассчитывать как вес транспортного средства, так и сопротивление движению при определенных ускорениях и не рассчитывать ни вес, ни сопротивление движению при определенных ускорениях. Устройство 1 расчета коэффициента замедления может также рассчитывать как коэффициент сопротивления воздуха, так и сопротивление движению при определенных скоростях и не рассчитывать ни коэффициент сопротивления воздуха, ни сопротивление движению при определенных скоростях.
[0101] Чтобы улучшать точность расчета, устройство 1 расчета коэффициента замедления предпочтительно переключается между расчетом трех коэффициентов замедления, а именно, веса транспортного средства, коэффициента сопротивления воздуха и сопротивления движению, в соответствии с условиями движения. Однако устройство 1 расчета коэффициента замедления не ограничивается этим и может рассчитывать часть из трех коэффициентов замедления, а именно, вес транспортного средства, коэффициент сопротивления воздуха и сопротивление движению, во все моменты времени, несмотря на условия движения. В этом случае, когда рассчитывается один коэффициент замедления, предыдущее значение используется для другого коэффициента замедления, и два вычисления выполняются раздельно.
[0102] Отметим, что устройство 1 расчета коэффициента замедления согласно варианту осуществления, описанному выше, не ограничивается вышеприведенным вариантом осуществления и может быть подвержено различным модификациям в рамках формулы изобретения. Устройство 1 расчета коэффициента замедления согласно этому варианту осуществления может быть сконфигурировано посредством соответствующего комбинирования составляющих элементов вариантов осуществления, описанных выше.
[0103] В вышеприведенном описании устройство 1 расчета коэффициента замедления описывается как выводящее информацию помощи вождению для рекомендации операции выключения акселератора и операции включения тормоза в форме визуальной информации. Однако устройство 1 расчета коэффициента замедления не ограничивается этим и может выводить информацию помощи движению в форме голосовой информации, распознаваемой органами чувств информации и т.д., например. В этом случае, голосовая информация и распознаваемая органами чувств информация может изменяться по форме в случае необходимости.
[0104] Устройство 1 расчета коэффициента замедления согласно этому варианту осуществления описывается как помогающее движению транспортного средства 2, которое включает в себя двигатель 5 и MG 6, т.е. так называемого гибридного транспортного средства. Однако устройство 1 расчета коэффициента замедления не ограничивается этим и может предоставлять аналогичную помощь движению транспортного средства 2, включающего в себя только двигатель 5 в качестве источника мощности и не включающего в себя MG 6 в качестве источника мощности, т.е. так называемого традиционного транспортного средства. Кроме того, устройство 1 расчета коэффициента замедления может предоставлять аналогичную помощь движению транспортного средства 2, включающего в себя только MG в качестве источника мощности и не включающего в себя двигатель 5 в качестве источника мощности, т.е. так называемого электрического транспортного средства.
[0105] 1 устройство расчета коэффициента замедления
2 транспортное средство
3 система управления транспортного средства
4 HMI-устройство (устройство помощи)
5 двигатель (двигатель внутреннего сгорания)
6 MG (электромотор)
7 трансмиссия
8 тормозное устройство
9 аккумулятор
10 датчик скорости транспортного средства
11 датчик ускорения
12 датчик угловой скорости
13 датчик акселератора
14 датчик тормоза
15 GPS-устройство
16 устройство беспроводной связи
17 DB
50 ECU
51 блок вычисления характеристик транспортного средства
52 блок хранения
53 блок управления помощью движению
56 CAN
60 блок вычисления скорости транспортного средства
61 блок вычисления ускорения
62 блок вычисления движущей силы
63 блок вычисления веса транспортного средства
64 блок вычисления сопротивления воздуха
65 блок вычисления сопротивления движению
66 блок управления обработкой расчета
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2575327C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2561478C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2432550C2 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2448329C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2004 |
|
RU2338653C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2673581C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2016 |
|
RU2622616C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2505432C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВРАЩАЮЩИМИСЯ ЭЛЕКТРИЧЕСКИМИ МАШИНАМИ | 2015 |
|
RU2689075C2 |





Группа изобретений относится к устройству расчета коэффициента замедления. Устройство расчета коэффициента замедления транспортного средства состоит из блока запроса движущей силы, блока запроса скорости, блока запроса ускорения и блока расчета коэффициента замедления. Блок расчета коэффициента замедления рассчитывает множество коэффициентов замедления на основе соотношения между полученной движущей силой, скоростью и ускорением. Причем блок расчета коэффициента замедления меняет коэффициент замедления, который должен быть рассчитан, на основе условия движения транспортного средства. В другом варианте блок расчета коэффициента замедления также рассчитывает коэффициент сопротивления воздуха. Также возможен вариант, когда блок расчета коэффициента замедления рассчитывает сопротивление движению. Таким образом, достигается более высокая степень точности расчета коэффициента замедления. 3 н. и 14 з.п. ф-лы, 10 ил.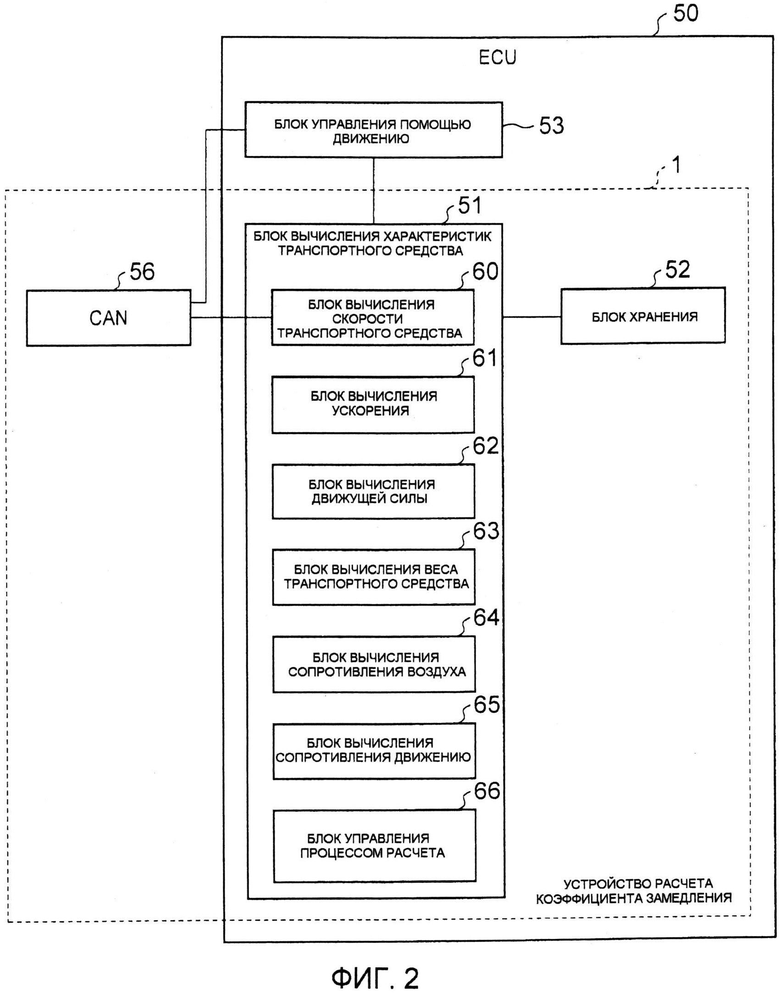
1. Устройство расчета коэффициента замедления, рассчитывающее коэффициент замедления транспортного средства,
устройство характеризуется тем, что содержит:
блок запроса движущей силы, который получает движущую силу транспортного средства;
блок запроса скорости, который получает скорость транспортного средства;
блок запроса ускорения, который получает ускорение транспортного средства; и
блок расчета коэффициента замедления, который рассчитывает множество коэффициентов замедления на основе соотношения между полученной движущей силой, скоростью и ускорением,
при этом блок расчета коэффициента замедления меняет коэффициент замедления, который должен быть рассчитан, на основе условия движения транспортного средства.
2. Устройство расчета коэффициента замедления по п. 1, характеризующееся тем, что блок расчета коэффициента замедления изменяет коэффициент замедления, который должен быть рассчитан, на основе скорости транспортного средства и ускорения.
3. Устройство расчета коэффициента замедления по п. 1 или 2, характеризующееся тем, что
коэффициенты замедления включают в себя вес транспортного средства, и
блок расчета коэффициента замедления устанавливает вес транспортного средства в качестве коэффициента замедления, который должен быть рассчитан, когда скорость транспортного средства ниже порогового значения, а ускорение выше порогового значения.
4. Устройство расчета коэффициента замедления по п. 1 или 2, характеризующееся тем, что
коэффициенты замедления включают в себя коэффициент сопротивления воздуха, и
блок расчета коэффициента замедления устанавливает коэффициент сопротивления воздуха в качестве коэффициента замедления, который должен быть рассчитан, когда скорость транспортного средства выше порогового значения, а ускорение ниже порогового значения.
5. Устройство расчета коэффициента замедления по п. 1 или 2, характеризующееся тем, что
коэффициенты замедления включают в себя сопротивление движению, и
блок расчета коэффициента замедления устанавливает сопротивление движению в качестве коэффициента замедления, который должен быть рассчитан, когда скорость транспортного средства ниже порогового значения и ускорение ниже порогового значения.
6. Устройство расчета коэффициента замедления по п. 1 или 2, характеризующееся тем, что
коэффициенты замедления включают в себя вес транспортного средства, коэффициент сопротивления воздуха и сопротивление движению, и
блок расчета коэффициента замедления рассчитывает коэффициент замедления, который должен быть рассчитан, посредством анализа соотношения между коэффициентом замедления, движущей силой, скоростью и ускорением с помощью уравнения движения.
7. Устройство расчета коэффициента замедления по п. 6, характеризующееся тем, что блок расчета коэффициента замедления использует заданные значения для коэффициентов замедления, отличных от коэффициента замедления, который должен быть рассчитан, в уравнении движения.
8. Устройство расчета коэффициента замедления, рассчитывающее коэффициент замедления транспортного средства,
устройство характеризуется тем, что содержит:
блок запроса движущей силы, который получает движущую силу транспортного средства;
блок запроса скорости, который получает скорость транспортного средства;
блок запроса ускорения, который получает ускорение транспортного средства; и
блок расчета коэффициента замедления, который рассчитывает коэффициент замедления на основе соотношения между полученной движущей силой, скоростью и ускорением,
при этом коэффициент замедления включает в себя коэффициент сопротивления воздуха, и
блок расчета коэффициента замедления рассчитывает коэффициент сопротивления воздуха, когда условие движения транспортного средства удовлетворяет заданному условию.
9. Устройство расчета коэффициента замедления по п. 8, характеризующееся тем, что заданное условие для условия движения транспортного средства удовлетворяется, когда скорость транспортного средства выше порогового значения.
10. Устройство расчета коэффициента замедления по п. 8 или 9, характеризующееся тем, что заданное условие для условия движения транспортного средства удовлетворяется, когда ускорение равно или ниже порогового значения.
11. Устройство расчета коэффициента замедления по п. 8 или 9, характеризующееся тем, что
коэффициенты замедления включают в себя вес транспортного средства, коэффициент сопротивления воздуха и сопротивление движению, и
блок расчета коэффициента замедления рассчитывает коэффициент замедления, который должен быть рассчитан, посредством анализа соотношения между коэффициентом замедления, движущей силой, скоростью и ускорением с помощью уравнения движения.
12. Устройство расчета коэффициента замедления по п. 11, характеризующееся тем, что блок расчета коэффициента замедления использует заданные значения для коэффициентов замедления, отличных от коэффициента замедления, который должен быть рассчитан, в уравнении движения.
13. Устройство расчета коэффициента замедления, рассчитывающее коэффициент замедления транспортного средства,
устройство характеризуется тем, что содержит:
блок запроса движущей силы, который получает движущую силу транспортного средства;
блок запроса скорости, который получает скорость транспортного средства;
блок запроса ускорения, который получает ускорение транспортного средства; и
блок расчета коэффициента замедления, который рассчитывает коэффициент замедления на основе соотношения между полученной движущей силой, скоростью и ускорением,
при этом коэффициент замедления включает в себя сопротивление движению, и
блок расчета коэффициента замедления рассчитывает сопротивление движению, когда условие движения транспортного средства удовлетворяет заданному условию.
14. Устройство расчета коэффициента замедления по п. 13, характеризующееся тем, что заданное условие для условия движения транспортного средства удовлетворяется, когда скорость транспортного средства ниже порогового значения.
15. Устройство расчета коэффициента замедления по п. 13 или 14, характеризующееся тем, что заданное условие для условия движения транспортного средства удовлетворяется, когда ускорение транспортного средства выше порогового значения.
16. Устройство расчета коэффициента замедления по п. 13 или 14, характеризующееся тем, что
коэффициенты замедления включают в себя вес транспортного средства, коэффициент сопротивления воздуха и сопротивление движению, и
блок расчета коэффициента замедления рассчитывает коэффициент замедления, который должен быть рассчитан, посредством анализа соотношения между коэффициентом замедления, движущей силой, скоростью и ускорением с помощью уравнения движения.
17. Устройство расчета коэффициента замедления по п. 16, характеризующееся тем, что блок расчета коэффициента замедления использует заданные значения для коэффициентов замедления, отличных от коэффициента замедления, который должен быть рассчитан, в уравнении движения.
| УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОЙ ТОРМОЖЕНИЯ/ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2357882C1 |
| JP 2001108512 A, 20.04.2001 | |||
| JP 2007271282 A, 18.10.2007 | |||

