Область техники
Настоящее изобретение, в целом, направлено на детское автомобильное сиденье или детскую удерживающую систему (CRS) для использования в автомобиле и, в частности, на автоматическую регулировку и автоматическую установку CRS.
Уровень техники
Множество отраслевых и правительственных руководящих документов и стандартов рекомендуют надлежащие ограничения для CRS-установки. Помимо паспортов на изделия изготовителей CRS, релевантная информация, относящаяся к стандартам и руководству, содержится в трех отчетах Национального управления по безопасности движения (NHTSA), озаглавленных "Driver mistakes when installing child seats", "Misuse of Child restraints" и "Child restraint Use Survey: LATCH Use and Misuse". Кроме того, стандарты FMVSS213 и 225 включают в себя требования к проведению испытаний на аварийную безопасность для CRS.
Помимо этого, Федеральные стандарты безопасности автомобильных транспортных средств гласят, что после того, как CRS подверглась испытаниям на удар при аварии, угол между опорной поверхностью спинки CRS для ребенка и вертикалью не должен превышать 70 градусов. Чтобы минимизировать этот угол отклонения после удара при аварии и предотвращать отделение ребенка от CRS, изготовители заявляют, что при установке CRS в позиции, обращенной против движения, детское сиденье должно откидываться, по меньшей мере, на 30 градусов от вертикали и до 45 градусов от вертикали, когда автомобиль паркуется на ровной поверхности. Поскольку сиденья транспортного средства имеют варьирующиеся углы, для большинства изготовителей детских удерживающих приспособлений стало стандартным предоставлять средство для выравнивания по уровню детского удерживающего сиденья в отношении угла сиденья транспортного средства, чтобы достигать такого оптимального диапазона углов спинки CRS-сиденья. Существующие устройства для выравнивания по уровню включают в себя механические ножки, винтовые механизмы, рычаги, прокладки, платформы и другие неавтоматизированные средства. Все эти устройства приводятся в действие вручную. Также предпринято несколько умеренных попыток касательно CRS-сиденья с откидывающейся спинкой с электромотором. Для показа угла сиденья пользователю в настоящее время применяется множество механических устройств, включающих в себя плавающие пузырьки, катающиеся шарики и другие окна визуального наблюдения или маятниковые индикаторы. Также в настоящее время применяются некоторые индикаторы с электромеханической обратной связью по углу.
Современные детские удерживающие системы могут соединяться с транспортным средством посредством ремня безопасности в транспортном средстве или посредством системы крепления детского сиденья (LATCH), которая интегрируется с CRS, имеющей специализированные соединители и ремни. Требуется, чтобы ремень LATCH-системы либо ремень безопасности в транспортном средстве соединял CRS достаточно плотно, чтобы она не могла перемещаться более чем на один дюйм в поперечном и продольном направлении относительно сиденья транспортного средства, к которому она присоединяется. Многие изготовители используют простой ременный пояс, в то время как другие основываются на кривошипах и отводных рычагах либо других механических средствах для того, чтобы помогать пользователю в натягивании. Предусмотрено даже несколько устройств, которые используют приводимые в действие за счет электромотора механизмы, чтобы натягивать ремень. Что касается определения крутящего момента, то описаны механические устройства, хотя только несколько из них имеют электромеханические средства обратной связи.
Также раскрыта обратная связь CRS-сиденья с люлькой для младенцев с ее основанием, и затем с транспортным средством; тем не менее, способ которым определено это соединение, основан не самих защелкивающихся CRS-фиксаторах, а на основной части сиденья транспортного средства или сиденья с люлькой для младенцев, а также на ремне безопасности в транспортном средстве или точках крепления защелкивающихся фиксаторов.
Исследование NHTSA 2009, озаглавленное "Drivers' Mistakes When Installing Child seats (DOT HS 811 234)", указывает, что приблизительно 73% детских удерживающих приспособлений установлены некорректно. Оно также заявляет, что в 72% из этих установок, пользователь предполагает, что он корректно установил CRS, тогда как фактически это было сделано неправильно.
Соответственно, существует потребность в системе CRS-установки, которая может эффективнее осуществляться посредством автоматизации с меньшим числом ошибок/неудобством для пользователя и большей безопасностью.
Сущность изобретения
Предусмотрена CRS с автоматической установкой, которая предоставляет автоматизированную обратную связь и управление углом установки сиденья, защелкиванием и натягиванием ремня и подтверждением корректной установки. Более конкретно, CRS, раскрытая в данном документе, использует датчики, чтобы отслеживать угол CRS-основания относительно уровня, подтверждать корректное защелкивание CRS к своему основанию и затем к сиденью транспортного средства и подтверждать натягивание ремней до требуемого натяжения для обеспечения аварийной безопасности. Пошаговая работа и подтверждение в процедуре установки осуществляются через кнопку(ки) или другой тактильный ввод и ретранслируются пользователю через электронный видеодисплей и/или звуковое средство. Все операции контролируются и обрабатываются посредством интегрированной системы управления, предоставляющей минимальный пользовательский интерфейс для принятия решений.
В частности, предусмотрено детское сиденье, сконфигурированное с возможностью закрепления на сидении транспортного средства. Детское сиденье включает в себя: основание сиденья, закрепляемое на сиденье транспортного средства; часть для размещения ребенка, поддерживаемую посредством основания сиденья; систему натяжения ремня, включенную в основание сиденья для приема ремня, который соединяет основание сиденья с сиденьем транспортного средства; систему выравнивания по уровню, включенную в основание сиденья для выравнивания по уровню основания сиденья относительно сиденья транспортного средства; и контроллер, функционально соединенный с системой натяжения ремня и системой выравнивания по уровню. Контроллер активирует систему натяжения ремня и систему выравнивания по уровню таким образом, что система натяжения ремня натягивает ремень до заданного натяжения, и система выравнивания по уровню выравнивает по уровню основание сиденья до заданного угла относительно сиденья транспортного средства.
Контроллер может активировать систему натяжения ремня и систему выравнивания по уровню итеративно, одновременно или последовательно. Ремень, принимаемый посредством системы натяжения ремня, может представлять собой ремень безопасности транспортного средства или ремень LATCH-системы. Детское сиденье может быть выбрано из группы, состоящей из: люлек для младенцев, обращенных против движения; откидных детских сидений, обращенных по ходу движения и против движения; и дополнительных подушек для детского сиденья с привязными лямками.
Детское сиденье дополнительно может включать в себя: по меньшей мере, один датчик для определения натяжения ремня, принимаемого посредством системы натяжения ремня; и, по меньшей мере, один датчик для определения угла основания сиденья относительно сиденья транспортного средства. По меньшей мере, один датчик для определения натяжения и, по меньшей мере, один датчик для определения угла могут быть функционально соединены с контроллером. Контроллер может активировать систему натяжения ремня и систему выравнивания по уровню таким образом, что система натяжения ремня натягивает ремень до заданного натяжения, и система выравнивания по уровню выравнивает по уровню основание сиденья до заданного угла относительно сиденья транспортного средства на основе обратной связи, по меньшей мере, от одного датчика для определения натяжения и, по меньшей мере, одного датчика для определения угла.
Пользовательский интерфейс может размещаться на, по меньшей мере, одном из основания сиденья или части для размещения ребенка, чтобы позволять пользователю инициировать систему натяжения ремня и систему выравнивания по уровню. Альтернативно, пользовательский интерфейс может быть отдельным электронным модулем, обменивающимся данными с контроллером детского сиденья проводным или беспроводным способом. Пользовательский интерфейс может предоставлять пользователю обратную связь относительно состояния детского сиденья. Система выравнивания по уровню может быть сконфигурирована с возможностью поднимать и опускать опору, соединенную с нижней поверхностью основания сиденья.
Помимо этого, предусмотрено детское сиденье, сконфигурированное с возможностью закрепления на сидении транспортного средства. Детское сиденье включает в себя: основание сиденья, закрепляемое на сиденье транспортного средства; часть для размещения ребенка, поддерживаемую посредством основания сиденья; систему выравнивания по уровню, включенную в основание сиденья для выравнивания по уровню основания сиденья относительно сиденья транспортного средства; и контроллер, функционально соединенный с системой натяжения ремня и системой выравнивания по уровню. Контроллер принимает обратную связь, по меньшей мере, от одного датчика, ассоциированного с детским сиденьем, в отношении угла основания сиденья относительно сиденья транспортного средства, и предоставляет пользователю индикатор в отношении угла основания сиденья относительно сиденья транспортного средства.
Индикатор может представлять собой визуальный индикатор, предоставленный на дисплее, соединенном, по меньшей мере, с одним из основания сиденья или части для размещения ребенка. Альтернативно, индикатор может представлять собой, по меньшей мере, одно из визуального или звукового индикатора того, что основание сиденья размещается относительно сиденья транспортного средства под приемлемым углом. Приемлемый угол может быть определен посредством контроллера посредством сравнения угла основания сиденья относительно сиденья транспортного средства, определенного посредством, по меньшей мере, одного датчика, с заданным углом. Заданный угол может представлять собой, по меньшей мере, одно из установленного на заводе угла или угла, определенного посредством калибровки автомобильного сиденья или относительно поверхности, на которую опирается транспортное средство, или поверхности транспортного средства. Система выравнивания по уровню может быть активирована вручную, чтобы выравнивать по уровню основание сиденья до заданного угла. Альтернативно, система выравнивания по уровню может быть активирована посредством контроллера, чтобы выравнивать по уровню основание сиденья до заданного угла, на основе обратной связи, по меньшей мере, от одного датчика.
Детское сиденье дополнительно может включать в себя систему натяжения ремня, включенную в основание сиденья для приема ремня, который соединяет основание сиденья с сиденьем транспортного средства. Контроллер может принимать обратную связь, по меньшей мере, от одного датчика, ассоциированного с ремнем, который соединяет основание сиденья с сиденьем транспортного средства, и предоставлять пользователю индикатор относительно натяжения ремня. Ремень, принимаемый посредством системы натяжения ремня, может представлять собой, по меньшей мере, одно из ремня безопасности транспортного средства или ремня LATCH-системы. Система натяжения ремня может быть активирована вручную, чтобы натягивать ремень до заданного натяжения. Система натяжения ремня может быть активирована посредством контроллера, чтобы натягивать ремень до заданного натяжения, на основе обратной связи, по меньшей мере, от одного датчика, ассоциированного с ремнем.
Также предусмотрено детское автомобильное сиденье, которое включает в себя: основание сиденья, закрепляемое на сиденье транспортного средства; люльку для младенцев, съемным образом соединяемую с основанием сиденья; систему натяжения ремня, включенную в основание сиденья для приема ремня, который соединяет основание сиденья с сиденьем транспортного средства; систему выравнивания по уровню, включенную в основание сиденья для выравнивания по уровню основания сиденья относительно сиденья транспортного средства; и контроллер, функционально соединенный с системой натяжения ремня и системой выравнивания по уровню. Контроллер активирует систему натяжения ремня и систему выравнивания по уровню таким образом, что система натяжения ремня натягивает ремень до заданного натяжения, и система выравнивания по уровню выравнивает по уровню основание сиденья до заданного угла относительно сиденья транспортного средства.
Дополнительно, предусмотрено детское автомобильное сиденье, которое включает в себя: основание сиденья, закрепляемое на сиденье транспортного средства; люльку для младенцев, съемным образом соединяемую с основанием сиденья; и интерфейсное устройство, соединенное, по меньшей мере, с одним из основания сиденья или люльки для младенцев и сконфигурированное с возможностью предоставления пользователю индикатора того, что основание сиденья надлежащим образом закрепляется на сиденье транспортного средства.
Интерфейсное устройство может быть сконфигурировано с возможностью предоставления пользователю индикатора, когда люлька для младенцев соединяется с основанием сиденья. Интерфейсное устройство может включать в себя дисплей, предоставляющий пользователю визуальный индикатор того, что основание сиденья надлежащим образом закрепляется на сиденье. Детское автомобильное сиденье дополнительно может включать в себя множество датчиков, ассоциированных с, по меньшей мере, одним из основания сиденья и люльки для младенцев и сконфигурированных с возможностью определения того, имеет или нет основание сиденья надлежащий уровень, имеет или нет ремень, закрепляющий основание сиденья на сиденье транспортного средства, надлежащее натяжение, находится или нет ручка люльки для младенцев в корректной позиции, скручены или нет ремни, закрепляющие основание сиденья на сиденье транспортного средства, имеет или нет привязная лямка, закрепляющая ребенка в люльке для младенцев, надлежащее натяжение и надлежащую высоту, либо любую комбинацию вышеозначенного. Автомобильное сиденье также может включать в себя контроллер, функционально соединенный с множеством датчиков и сконфигурированный с возможностью вывода в интерфейсное устройство индикатора того, что основание сиденья надлежащим образом закрепляется на сиденье транспортного средства. Индикатор того, что основание сиденья надлежащим образом закрепляется на сиденье транспортного средства, может включать в себя индикатор того, что основание сиденья имеет надлежащий уровень, что ремень, закрепляющий основание сиденья на сиденье транспортного средства, имеет надлежащее натяжение, что ручка люльки для младенцев находится в корректной позиции, что ремни, закрепляющие основание сиденья на сиденье транспортного средства, не скручены, что привязная лямка, закрепляющая ребенка в люльке для младенцев, имеет надлежащее натяжение и надлежащую высоту, либо любую комбинацию вышеозначенного.
Детское автомобильное сиденье дополнительно может включать в себя систему натяжения ремня, включенную в основание сиденья для приема ремня, который соединяет основание сиденья с сиденьем транспортного средства; систему выравнивания по уровню, включенную в основание сиденья для выравнивания по уровню основания сиденья относительно сиденья транспортного средства; и контроллер, функционально соединенный с системой натяжения ремня и системой выравнивания по уровню. Контроллер может быть сконфигурирован с возможностью активировать систему натяжения ремня и систему выравнивания по уровню таким образом, что система натяжения ремня натягивает ремень до заданного натяжения, и система выравнивания по уровню выравнивает по уровню основание сиденья до заданного угла относительно сиденья транспортного средства. Ремень, принимаемый посредством системы натяжения ремня, может представлять собой, по меньшей мере, одно из ремня безопасности транспортного средства или ремня LATCH-системы.
Детское автомобильное сиденье может дополнительно включать в себя: по меньшей мере, один датчик для определения натяжения ремня, принимаемого посредством системы натяжения ремня; и, по меньшей мере, один датчик для определения угла основания сиденья относительно сиденья транспортного средства. По меньшей мере, один датчик для определения натяжения и, по меньшей мере, один датчик для определения угла могут быть функционально соединены с контроллером. Контроллер может активировать систему натяжения ремня и систему выравнивания по уровню таким образом, что система натяжения ремня натягивает ремень до заданного натяжения, и система выравнивания по уровню выравнивает по уровню основание сиденья до заданного угла относительно сиденья транспортного средства на основе обратной связи, по меньшей мере, от одного датчика для определения натяжения и, по меньшей мере, одного датчика для определения угла.
Также предусмотрено детское автомобильное сиденье, которое включает в себя: основание сиденья, закрепляемое на сиденье транспортного средства; часть для размещения ребенка, соединенную с основанием сиденья; по меньшей мере, один датчик, ассоциированный, по меньшей мере, с одним из части для размещения ребенка или основания сиденья, сконфигурированный с возможностью определения присутствия объекта в части для размещения ребенка; и интерфейсное устройство, соединенное с, по меньшей мере, одним из основания сиденья или части для размещения ребенка и сконфигурированное с возможностью предоставления пользователю индикатора того, что основание сиденья надлежащим образом закрепляется на сиденье транспортного средства, когда, по меньшей мере, один датчик предоставляет индикатор того, что объект присутствует в части для размещения ребенка.
Часть для размещения ребенка может съемным образом соединяться с основанием сиденья. По меньшей мере, один датчик, ассоциированный с, по меньшей мере, одним из части для размещения ребенка или основания сиденья, может определять, по меньшей мере, одно из роста и веса объекта в части для размещения ребенка. Если, по меньшей мере, один датчик определяет то, что, по меньшей мере, одно из роста и веса объекта ниже заданного значения, в пользовательском интерфейсе может предоставляться индикатор того, что детское автомобильное сиденье должно быть установлено в ориентации, обращенной против движения.
Помимо этого, предусмотрено детское автомобильное сиденье, которое включает в себя: основную часть сиденья, соединенную с сиденьем транспортного средства; множество датчиков, ассоциированных с основной частью сиденья; и интерфейсное устройство, соединенное с основной частью сиденья и сконфигурированное с возможностью предоставлять пользователю индикатор того, что основная часть сиденья надлежащим образом закрепляется на сиденье транспортного средства, на основе обратной связи из множества датчиков.
Множество датчиков, ассоциированных с основной частью сиденья, может быть сконфигурировано с возможностью определять то, имеет или нет основание сиденья надлежащий уровень, имеет или нет ремень, закрепляющий основание сиденья на сиденье транспортного средства, надлежащее натяжение, находится или нет ручка люльки для младенцев в корректной позиции, скручены или нет ремни, закрепляющие основание сиденья на сиденье транспортного средства, имеет или нет привязная лямка, закрепляющая ребенка в люльке для младенцев, надлежащее натяжение и надлежащую высоту, либо любую комбинацию вышеозначенного. Детское автомобильное сиденье дополнительно может включать в себя контроллер, функционально соединенный с множеством датчиков и сконфигурированный с возможностью выводить в интерфейсное устройство индикатор того, что основание сиденья надлежащим образом закрепляется на сиденье транспортного средства. Индикатор того, что основание сиденья надлежащим образом закрепляется на сиденье транспортного средства, может включать в себя индикатор того, что основание сиденья имеет надлежащий уровень, что ремень, закрепляющий основание сиденья на сиденье транспортного средства, имеет надлежащее натяжение, что ручка люльки для младенцев находится в корректной позиции, что ремни, закрепляющие основание сиденья на сиденье транспортного средства, не скручены, что привязная лямка, закрепляющая ребенка в люльке для младенцев, имеет надлежащее натяжение и надлежащую высоту, либо любую комбинацию вышеописанного.
Эти и другие признаки и характеристики настоящего изобретения, а также способы работы и функции соответствующих элементов конструкций и комбинации частей и изделий должны становиться более очевидными при рассмотрении последующего описания и прилагаемой формулы изобретения со ссылкой на прилагаемые чертежи, все из которых являются частью этого подробного описания, при этом аналогичные ссылки с номерами обозначают соответствующие части на различных чертежах. Тем не менее, следует четко понимать, что чертежи служат только для целей иллюстрации и описания не предназначены в качестве задания ограничений изобретения. При использовании в подробном описании и в формуле изобретения, форма единственного числа может влючать в себя и несколько таких объектов, если контекст явно не предписывает иное.
Краткое описание чертежей
В целях упрощения понимания изобретения, прилагаемые чертежи и описание иллюстрируют его предпочтительные варианты осуществления, из которых может пониматься и приниматься во внимание изобретение, различные варианты осуществления его структур, конструкция и способ работы, а также множество преимуществ. На чертежах:
Фиг. 1A-1C - несколько видов LATCH-устройства, которое содержит систему для подтверждения защелкивания ремня в соответствии с настоящим изобретением;
Фиг. 2 - вид в перспективе основания люльки и LATCH-устройства, осуществляющего различные признаки CRS согласно настоящему изобретению;
Фиг. 3 - вид сбоку основания люльки с фиг. 2 с подъемной опорой, которая вращается вокруг центральной точки поворота в выдвинутой позиции;
Фиг. 4 - вид сбоку основания люльки с подъемной опорой в выдвинутой позиции с фиг. 3, установленного в сиденье транспортного средства;
Фиг. 5 - вид снизу сбоку в перспективе механизма выравнивания по уровню для использования с CRS в соответствии с настоящим изобретением с узлом электромотора и кулачка для приведения в действие подъемной опоры в выдвинутую позицию;
Фиг. 6 - вид в перспективе опоры для выравнивания по уровню с механизмом прямолинейного движения согласно другому варианту осуществления настоящего изобретения, имеющим параллелограммный механизм для предоставления обратной связи по автоматическому выравниванию по уровню и углу;
Фиг. 7 - вид сбоку механизма выравнивания по уровню прямолинейного движения с опорой, выдвигающейся из основания люльки, установленного в сиденье транспортного средства;
Фиг. 8 - вид сбоку основания люльки с фиг. 2, установленного в сиденье транспортного средства, имеющего ролик, присоединенный к опоре, и кромочный удлинитель, который входит между подушкой и спинкой сиденья транспортного средства для более простой установки;
Фиг. 9 - вид в перспективе основания люльки с фиг. 2 с ремнем для присоединения основания к сиденью транспортного средства и датчиком определения натяжения для измерения натяжения ремня;
Фиг. 10 - вид сверху сбоку в перспективе механизма натяжения согласно настоящему изобретению для автоматического увеличения натяжения ремня;
Фиг. 11 - вид снизу сбоку в перспективе механизма натяжения с фиг. 10, показывающий ремень, намотанный вокруг шпинделя для натягивания ремня, и защелкивающего механизма, состоящего из собачки и храповика для предотвращения "обратного отвода" ремня;
Фиг. 12 - вид сбоку храпового механизма с фиг. 11;
Фиг. 13 - вид в перспективе низа основания люльки с фиг. 2 с опорой механизма выравнивания по уровню в открытой позиции таким образом, что механизм натяжения является доступным;
Фиг. 14 - вид в перспективе другого варианта осуществления основания люльки с ремнем в улучшенной конфигурации для подачи;
Фиг. 15A - блок-схема электронных компонентов CRS, показывающей взаимосвязь между компонентами и микроконтроллером;
Фиг. 15B - блок-схема последовательности операций способа, описывающая алгоритм для калибровки CRS согласно настоящему изобретению;
Фиг. 15C - блок-схема последовательности операций способа, описывающая алгоритм установки, выравнивания по уровню и натяжения, используемый посредством CRS согласно настоящему изобретению;
Фиг. 16 - вид в перспективе основания люльки с фиг. 2 с видимыми аккумулятором и самогенерирующим силовым механизмом;
Фиг. 17 - вид сбоку основания люльки с фиг. 2 с центром управления пользовательского интерфейса, показанный укрупненным способом;
Фиг. 18 - вид в перспективе основания и люльки согласно настоящему изобретению с гнездовым разъемом питания для передачи питания и данных между основанием и люлькой;
Фиг. 19 - вид сбоку основания люльки с фиг. 2, соединенного с люлькой для младенцев, с укрупненным видом защелкивающего механизма для соединения основания с люлькой;
Фиг. 20A и 20B - виды сбоку и в перспективе соответственно, иллюстрирующие конфигурацию датчиков для соединения CRS с основанием в соответствии с настоящим изобретением;
Фиг. 21 - вид спереди люльки для младенцев согласно настоящему изобретению с механизмом с электромотором, чтобы натягивать/ослаблять привязную лямку, и датчиками натяжения привязных лямок;
Фиг. 22 - вид в перспективе задней части люльки с фиг. 21 с моторным механизмом для регулирования высоты привязной лямки;
Фиг. 23 - вид в перспективе интеллектуального защелкивающего устройства, имеющего механизм защелкивания и натяжения и соединители для прикрепления к LATCH-системе;
Фиг. 24 - вид в перспективе механизма защелкивания и натяжения с фиг. 23;
Фиг. 25 - вид снизу механизма защелкивания и натяжения с фиг. 23;
Фиг. 26 - вид в поперечном сечении механизма защелкивания и натяжения с фиг. 23, в котором электромотор, зубчатая передача и шпиндель являются видимыми;
Фиг. 27 - покомпонентный вид механизма защелкивания и натяжения с фиг. 23; и
Фиг. 28 - блок-схема последовательности операций способа, иллюстрирующая процесс для увеличения натяжения ремня для использования с интеллектуальным защелкивающим устройством с фиг. 23.
Подробное описание предпочтительных вариантов осуществления
Для целей нижеприведенного описания термины "верхний", "нижний", "правый", "левый", "вертикальный", "горизонтальный", "верх", "низ", "поперечный", "продольный" и их производные должны быть связаны с изобретением согласно ориентации на чертежах. Тем не менее, следует понимать, что изобретение может допускать альтернативные изменения и последовательности этапов, если иное не указано в явном виде. Также следует понимать, что конкретные устройства и процессы, проиллюстрированные на прилагаемых чертежах и описанные в нижеприведенном подробном описании, являются просто примерными вариантами осуществления изобретения. Следовательно, конкретные размеры и другие физические характеристики, связанные с вариантами осуществления, раскрытыми в данном документе, не должны рассматриваться как ограничение.
CRS с автоматической установкой, осуществляющая различные аспекты настоящего изобретения, показана на фиг. 1-23. Тем не менее, специалистам в данной области техники должно быть очевидным, что CRS по фиг. 1-23 представляет только одну из широкого спектра конструкций, конфигураций и режимов работы детских удерживающих приспособлений, которые попадают в пределы объема настоящего изобретения. Например, аспекты настоящего изобретения, поясненные в данном документе, могут быть включены в люльки для младенцев, обращенные против движения, откидные детские люльки, обращенные по ходу движения и против движения, и дополнительные подушки для детского сиденья с привязными лямками и для использования с поясными/плечевыми ремнями.
CRS, согласно настоящему изобретению, плотно присоединена к сиденью транспортного средства посредством ремня. В одном варианте осуществления, CRS сконфигурирована с возможностью использования с системой крепления детского сиденья (LATCH), которая имеет европейский эквивалент в ISOFIX-системе. Со ссылкой на фиг. 1A-1C, проиллюстрированы соединители 2, сконфигурированные с возможностью использования с LATCH-устройством. Соединители 2 включают датчик 4, чтобы определять присутствие точки соединения, всегда металлической штанги 6, в зацепляющих "захватах" 8 соединителей 2. Датчик 4 может быть оптическим прерывающим переключателем, контактным переключателем, миниатюризованной металлодетекторной схемой или другим аналогичным устройством. Выводной провод 10 передает сигнал из датчиков 4 в контроллер (не показан), предоставленный на CRS, указывающий, что соединитель 2 присоединен к штанге 6 LATCH-системы. Альтернативно, CRS может быть присоединена к сиденью транспортного средства через другие стандартизированные точки соединения CRS и транспортного средства, такие как ремень безопасности.
На фиг. 2-17 проиллюстрировано основание люльки для младенцев CRS с автоматической установкой. Основание CRS сконфигурировано с возможностью плотно присоединяться к сиденью в салоне транспортного средства. Основание 12 содержит конструкцию в форме гнезда, адаптированную с возможностью принимать и удерживать люльку для младенцев (не показана), ремень 14 для прикрепления основания к сиденью транспортного средства и механизм 20 выравнивания по уровню, который выравнивает по уровню основание 12 относительно сиденья транспортного средства, за счет этого обеспечивая то, что люлька для младенцев удерживается в ровной ориентации.
Как показано на фиг. 2, ремень 14 проходит из соединителей 2, расположенных на обеих сторонах CRS, через отверстия, расположенные на стороне базовой конструкции, и в механизм 60 натяжения. Механизм 20 выравнивания по уровню идет из нижней части основания 12 с тем, чтобы уравновешивать наклон (тета) сиденья транспортного средства. Опора 24 расположена в основании механизма 20 выравнивания по уровню. Механизм 18 расцепления для регулирования высоты вручную идет из основания опоры, позволяя пользователю регулировать высоту вручную. Необязательно, механизм 60 натяжения является натяжным устройством с электромотором для автоматического регулирования натяжения ремня 14. В случае автоматизированного механизма натяжения основание 12 дополнительно может содержать механизм 62 расцепления вручную, идущий из основания 12, позволяющий пользователю расцеплять ремень 14 от автоматизированного механизма и регулировать натяжение вручную с использованием дополнительного приводного кривошипа 78. Основание 12 дополнительно содержит пользовательский интерфейс, имеющий центр 90 управления, к примеру, видеодисплей для отображения видеоданных для пользователя. Релевантные данные включают в себя, например, свет индикатора, сообщающий пользователю то, является или нет сиденье ровным, надежно или нет основание прикрепляется к сиденью транспортного средства посредством соединителей, и надежно или нет установлена привязная лямка, закрепляющая ребенка в люльке для младенцев, на месте. Центр управления также может включать в себя устройства ввода, позволяющие пользователю вводить данные касательно ребенка, который должен закрепляться в CRS.
Со ссылкой на фиг. 3-8, как описано выше, CRS по настоящему изобретению включает в себя систему для автоматического выравнивания по уровню CRS и предоставления обратной связи по углу пользователю. Согласно одному варианту осуществления системы автоматического выравнивания по уровню, показанной на фиг. 3-5, механизм 20 выравнивания по уровню содержит опору 24, выдвигающуюся из основания 12 люльки. Опора 24 выдвигается в направлении вниз, вращаясь вокруг поворотного шарнира 22. Преимущество поворотного шарнира 22 состоит в том, что есть возможность достигать большей величины движения опоры 24 при меньшей величине движения приводного механизма. Таким образом, проблема выдвижения опоры за пределы высоты основания сиденья эффективно снижается.
Как проиллюстрировано на фиг. 3, опора 24 выдвигается из нижней части основания 12 люльки для младенцев в раздвижной компоновке, в которой множество поднимающихся секций 26 вкладываются друг в друга, когда опора 24 находится в закрытой позиции. Когда опора выдвигается вниз, вращаясь вокруг поворотного шарнира 22, вложенные секции 26 расцепляются друг от друга. Фиг. 4 иллюстрирует основание 12 с опорой 24 в выдвинутой позиции, установленной в сиденье 16 транспортного средства. Необязательно, как показано на фиг. 5, механизм 20 выравнивания по уровню включает в себя электромотор 28 для приведения в действие удлинения раздвижной опоры 24. Механизм выравнивания по уровню, включающий в себя электромотор, размещается внутри основания 12 люльки.
Фиг. 5 иллюстрирует один вариант осуществления механизма выравнивания по уровню, имеющего электромотор для автоматического выравнивания по уровню. Механизм содержит электромотор 28, зацепленный с кулачком 30 посредством плоскозубчатого соединения 32. Электромотор 28, используемый для того, чтобы питать кулачок 30, может быть электрическим или любого другого типа, к примеру, гидравлическим. Плоскозубчатое соединение является механическим соединением, используемым для того, чтобы соединять два фрагмента вала между собой, и отличается посредством зубьев, которые сцепляются между собой на торцевых поверхностях каждой половины вала. Когда электромотор 28 приводит в действие кулачок 30, кулачок 30 вращается, за счет этого прилагая силу к раздвижной опоре 24, вызывающую выдвижение опоры 24 и расцепление вложенных секций 26 опоры. В дополнение к кулачковому механизму, также может быть использован винтовой домкратный механизм, механизм реечной передачи, параллелограммный подъемный механизм или другой тип механизма прямолинейного движения для того, чтобы предоставлять средство выравнивания по уровню высоты через поворотный шарнир с электромотором. Помимо этого, также могут использоваться механизмы вращательного движения, чтобы регулировать высоту. Механизмы вращательного движения включают в себя зубчатую передачу, цепной механизм, ременной механизм или прямой привод с роторным электромотором.
Желательно, чтобы высота основания люльки для младенцев также была регулируемой без электромотора, в случае если пользователь неспособен или не желает использовать автоматизированную систему. Расцепление вручную осуществляется посредством расцепляющего рычага, который расцепляет кулачок от электромотора. Как показано на фиг. 5, механизм 20 выравнивания по уровню дополнительно содержит ручной расцепляющий рычаг 34 и ручной дополнительный приводной рычаг 36. Ручной расцепляющий рычаг 34 позволяет пользователю расцеплять электромотор 28 от кулачка 30, в силу этого не допуская поддержку электромотором кулачка 30, вызывая возврат опоры 24 во втянутую позицию. Когда электромотор 28 расцепляется, пользователь может вращать ручной дополнительный приводной рычаг 36 для того, чтобы вручную манипулировать высотой опоры 24. Высота также может регулироваться через другие механические механизмы, такие как, например, поворотный кривошип, который приводит в действие шпиндель, содержащий часть привода трансмиссии, либо с помощью механизма муфты скольжения.
Желательно, чтобы система регулирования высоты не допускала отвод назад, так что в случае аварии силы не передаются через привод трансмиссии приводного механизма. С учетом этой проблемы, механизм 20 выравнивания по уровню дополнительно содержит стопорящий механизм 38 с храповиком и собачкой для закрепления кулачка 30 на месте, когда достигается требуемая высота.
Альтернативно, как показано на фиг. 6 и 7, CRS может включать в себя механизм 200 удлинителя хвостовика, чтобы регулировать высоту основания 12. Механизм удлинителя хвостовика основывается на ножке(ножках) с электромотором, которые могут подниматься или опускаться, чтобы достигать требуемого оптимального угла. Аналогично вращательному механизму регулирования, выдвижная опора приводится в действие посредством электромотора. Электромотор, используемый для того, чтобы приводить ножки, может иметь любой тип, электрический или другой, к примеру, гидравлический. Ножки с электромотором могут раздвигаться и укорачиваться посредством винтового домкратного механизма, параллелограммного подъемника, кабеля и шкива, цепочки, гидравлического/пневматического поршня или другого типа механического механизма. Как проиллюстрировано на фиг. 6, в одном варианте осуществления системы автоматического выравнивания по уровню с механизмом линейного удлинителя, используется параллелограммный подъемный механизм. Параллелограммный подъемник содержит ножки 202 параллелограмма, электромотор и винт 204 для приведения в движение ножек 202, стабилизирующую перемычку 206, идущую между соответствующими ножками 202 параллелограмма, и винтовое кольцо 208, зацепленное с электромотором. Внутреннее основание CRS монтируется на ножках 202 параллелограмма посредством монтажных реек 210. Фиг. 7 является видом в перспективе основания 12, установленного в сиденье транспортного средства 216. Опора 224 находится в выдвинутой позиции. CRS присоединена к сиденью транспортного средства 216 посредством соединителей 211, присоединяемых к соединительному ремню 214.
Для прямолинейных или вращательных механизмов выравнивания по уровню, желательно, чтобы диапазон регулирования превышал высоту основания. В этом случае требуется раздвижное или вкладывающееся покрытие, чтобы покрывать механику по всему диапазону удлинения. Кроме того, поворотный шарнир и линейные подъемные устройства, описанные выше, не должны истолковываться как ограничивающие настоящее изобретение, поскольку другие механизмы могут быть использованы для того, чтобы поднимать и выравнивать по уровню CRS.
Взаимодействие между CRS-ногой и основанием и сиденьем транспортного средства является очень важным. Чтобы не допускать зажатия CRS-ножек или основания в ходе процесса установки, часть CRS, которая взаимодействует с сиденьем, может такую иметь форму, чтобы упрощать плавное перемещение CRS в корректную позицию. Согласно одному варианту осуществления, как показано на фиг. 8, это выполняется с помощью колесиков 44 для прокатывания основания в требуемое местоположение на сиденье 16 транспортного средства. Механизм 46 удлинителя кромки идет из опоры 24. Когда основание 12 устанавливается, механизм 46 удлинителя кромки входит между подушкой и спинкой сиденья транспортного средства для сиденья транспортного средства. Датчик 48 на механизме 46 удлинителя кромки записывает то, находится или нет CRS в надлежащей позиции. Альтернативно, лыжеобразный пластиковый контур внизу CRS должен быть эффективным для плавного перемещения CRS в требуемую позицию.
Помимо этого, для использования с полностью интегрированной CRS-системой, описанной в данном документе, система автоматического выравнивания по уровню и механизм натяжения являются применимыми к различным форматам детских удерживающих систем. Эти форматы включают в себя, но не только, люльки для младенцев, обращенные против движения, откидные детские сиденья, обращенные по ходу движения и против движения, дополнительные подушки для детского сиденья с привязными лямками и форматы для использования с поясными/плечевыми ремнями транспортного средства. Эти детские удерживающие системы могут содержать или не содержать отдельный компонент основания.
Автоматизированная CRS по настоящему изобретению также включает в себя интегрированный механизм для автоматического натягивания соединительного ремня. Фиг. 9-14 иллюстрируют этот механизм 60 натяжения для CRS. Ремень 14 идет от соединителей 2 к CRS. Ремень 14 наматывается и закрепляется на месте посредством механизма 60 натяжения.
Как показано на фиг. 9, механизм 60 натяжения включает в себя один или более датчиков 64 определения натяжения, расположенных на внешней части основания 12 люльки, для измерения натяжения ремня 14 относительно основания 12, чтобы обеспечивать то, что основание плотно присоединено к сиденью транспортного средства. Ремень 14 входит в механизм 60 натяжения через прорезь 72, расположенную на внешней части основания 12 люльки. Механизм 62 расцепления вручную также находится в верхней части основания 12. Датчик определения натяжения является электромеханическим устройством для определения обратной связи по натяжению ремня. Например, можно монтировать тензодатчик(и) или другой датчик(и) нагрузки на различных поддерживающих элементах CRS, чтобы измерять силы, которые могут быть непосредственно связаны с натяжением соединительных ремней. Эти измерители или датчики нагрузки могут монтироваться на опорных конструкциях механизма натягивания ремня, так что механические напряжения или нагрузки на эти элементы могут коррелироваться с натяжением ремней, как показано на фиг. 9. Альтернативно, измерители или датчики нагрузки также могут монтироваться на валу электромотора для натягивания ремня, чтобы связывать деформацию от крутящего момента с натяжением ремня. Альтернативно, измерители или датчики нагрузки также могут монтироваться в "ножках" или других областях восприятия нагрузки механизма увеличения высоты или опорных конструкций, чтобы определять силы, имеющие обратное действие по отношению к натяжению ремня. Обратная связь из этих датчиков крутящего момента и/или натяжения используется для того, чтобы указывать CRS-контроллеру, когда механизм/электромотор для натягивания ремня должен быть остановлен вследствие достижения требуемого натяжения. Любая комбинация этих технологий измерений может быть использована в сочетании, чтобы более точно или отказоустойчиво предоставлять обратную связь по натяжению ремня.
Фиг. 10 и 11 являются видом сверху сбоку и видами снизу сбоку в перспективе механизма натяжения. Механизм расположен в основании 12 люльки. Механизм 60 натяжения содержит электромотор 66, который вращает шпиндель 68 для натягивания ремня. Электромотор 66 соединяется с возможностью зацепления со шпинделем 68 для натягивания посредством плоскозубчатого соединения 70. При использовании, ремень 14 входит в механизм 60 натяжения через прорезь 72 в основании 12, расположенном выше механизма натяжения. Когда электромотор управляется водителем, взаимодействующим с системой автоматического управления CRS, управление электромотором может отслеживать потребляемый электрический ток. Измерение может быть использовано для того, чтобы определять крутящий момент в электромоторе, который непосредственно связан с натяжением ремня. Дополнительно, измерение может быть использовано для того, чтобы определять увеличение потребляемого тока, указывающее помехи для ассоциированного механизма электромотора. Альтернативно, датчики 64 натяжения используются для того, чтобы отслеживать натяжение ремня 14.
Одна задача при конструировании механизма натягивания ремня заключается в том, что в идеале механизм натягивания не должен обязательно противостоять силам, действующим при аварии, чтобы достигать надлежащих стандартов безопасности. Необходимость учитывать силы, действующие при аварии, привносит значительную дополнительную стоимость и сложность в конструкцию приводной системы. Вместо этого, конфигурирование приводной системы в качестве не допускающей отвод назад системы удовлетворяет необходимым уровням безопасности без дополнительной сложности в виде необходимости конфигурировать механизм, чтобы противостоять силам, действующим при аварии. Хотя предусмотрено множество таких не допускающих отвод назад приводных механизмов, предпочтительный вариант осуществления согласно настоящему изобретению использует электромотор 66 для того, чтобы обеспечивать работу стопорящего механизма 74, содержащего храповик 75 и собачку 76. Альтернативно, электромотор может привлекать механизм на основе трения, аналогичный существующим механизмам натяжения ремня, которые являются общераспространенными в данной области техники. Как показано на фиг. 11, стопорящий механизм 74 расположен между шпинделем 68 и ручным дополнительным приводным кривошипом 78. Фиг. 12 иллюстрирует более подробный вид храпового механизма, в котором с храповиком 75 для натягивания ремня контактирует подпружиненная собачка 76. Собачка 76 не допускает вращения храповика 75 в обратном направлении.
Когда приводной механизм не допускает отвод назад, система должна конструироваться с возможностью обеспечивать сброс натяжения некоторым другим способом, так что CRS может извлекаться из сиденья транспортного средства. Механизм натягивания ремня на фиг. 10 и 11 может расцепляться вручную, чтобы позволять пользователю извлекать CRS. Хотя это может быть автоматизировано посредством предоставления возможности приводной системы быть реверсивной, из соображений безопасности ручной подход является предпочтительным. В этом варианте осуществления, защелкивающийся фиксатор 62 для расцепления ремня вручную расположен на одном конце механизма 60 натягивания. Когда фиксатор 62 для расцепления зацепляется, пользователь может вручную регулировать натяжение с использованием ручного дополнительного приводного кривошипа 78, расположенного на другом конце механизма натягивания.
Как показано на фиг. 13, механизм 60 натягивания ремня с электромотором расположен внутри основания 12 люльки для младенцев. Механизм натягивания является доступным, когда опора 24 механизма 20 выравнивания по уровню находится в открытой позиции.
Фиг. 14 иллюстрирует альтернативный вариант осуществления основания и ремня, в котором ремень 314 удерживается в "ориентации для подачи". Конструкция для подачи позволяет ремню 314 прилагать силы как, в направлении вниз, так и в обратном направлении, за счет этого более плотно присоединяя основание 312 к сиденью транспортного средства. Как показано на фиг. 14, ремень присоединен к основанию люльки посредством четырех контурных держателей 320, приводящих к тому, что ремень формирует U-образную кривую.
Дополнительная сложность в конструкции приводного механизма заключается в том, что удерживающие LATCH-приспособления соединяются на левой и правой стороне CRS. Приведение в действие одного шпинделя, фиксировано присоединяемого к CRS, например, не гарантирует равное натяжение на обеих сторонах для всех геометрий сиденья транспортного средства. Это может быть приемлемым для некоторых случаев, в частности, если точки присоединения креплений являются четко определенными, к примеру, в ISOFIX-стандарте. В другом варианте осуществления, каждая сторона приводится за счет электромотора и натягивается отдельно. Этот вариант осуществления, в частности, хорошо подходит для CRS-систем, которые могут монтироваться по ходу движения или против движения, которые зачастую конструируются с независимо регулируемыми привязными креплениями. Третий вариант осуществления использует одну приводную систему, которая не присоединена фиксировано к CRS. Вместо этого, приводная система монтируется таким образом, что она свободно плавно перемещается поперечно между набором конечных точек или точек поворота таким способом, что уравнивается натяжение между сторонами. Механизм с возможностью плавного перемещения является предпочтительным вследствие ограниченного пространства, доступного для приводной системы. Приводная система должна быть сконфигурирована таким образом, чтобы ни изменять местоположение центра тяжести ребенка, ни нарушать пространство ребенка.
Функции механизма выравнивания по уровню и механизмов натяжения направляются согласно процессу автоматической установки. Процесс автоматической установки управляется посредством CRS-контроллера, содержащего микропроцессор и ассоциированные электронные схемы. Контроллер может быть интегрирован в CRS либо является автономным и внешне присоединяемым к CRS. CRS-контроллер может иметь проводной или беспроводной интерфейс с различными раскрытыми датчиками. Часть или весь алгоритм управления по возможности также может быть реализован с дискретными аналоговыми компонентами вместо цифрового микроконтроллера.
Фиг. 15A является блок-схемой микроконтроллера, датчиков и дополнительных электронных компонентов CRS согласно одному варианту осуществления настоящего изобретения. Как проиллюстрировано на фиг. 15A, микроконтроллер 500 принимает ввод из датчиков 502 защелкивающихся фиксаторов, датчиков 504 уровня и датчиков 506 натяжения. Дополнительные данные также могут быть приняты из датчиков 508 слежения за ребенком, расположенных на люльке для младенцев, включающих в себя датчик 510 детского удерживающего приспособления и другие датчики 510 условий окружающей среды, расположенные в CRS. Контроллер 500 принимает мощность из системы 514 электропитания, такой как аккумулятор 516. Необязательно, контроллер 500 также принимает мощность из генератора 518 в ответ на движение транспортного средства или из самого транспортного средства через адаптер источника питания, соединенный со штепсельной розеткой 520 транспортного средства. Контроллер 500 может управлять тем, как мощность накапливается и распределяется в электронные компоненты CRS. Аналогично микроконтроллер 500 может уменьшать потребление мощности посредством включения и выключения датчиков и электромоторов в подходящее время. Контроллер 500 также в связи с пользовательским интерфейсом 522. Контроллер 500 принимает ввод от пользователя, к примеру, вес и возраст ребенка, через пользовательский интерфейс 522. На основе входных данных, функции установки и мониторинга CRS могут быть адаптированы с возможностью лучше соответствовать размеру и возрасту ребенка, который должен закрепляться. CRS также может основываться на входных данных, чтобы сообщать пользователю то, как CRS должна размещаться и закрепляться (например, по ходу движения и против движения, закрепляться с использованием LATCH-системы или ремня безопасности). Аналогично, контроллер 500 управляет тем, когда и как данные отображаются пользователю в пользовательском интерфейсе 522. Микроконтроллер 500 также управляет тем, когда электромоторы 28, 66 для выравнивания по уровню и натяжения включаются и выключаются, согласно алгоритму установки, подробнее описанному ниже.
В исследовании NHTSA и документации изготовителей рекомендуется, чтобы транспортное средство парковалось на ровном месте, перед установкой CRS. Механизм автоматического выравнивания по уровню по настоящему изобретению аппроксимирует парковку на ровном месте посредством определения наклона транспортного средства. Этот угол имеет взаимосвязь с известным "ровным" местом, которое должно представлять собой плоскость, перпендикулярную силе тяжести. Поскольку эта опорная точка может быть определена, транспортному средству необязательно парковаться на ровной поверхности в ходе установки, поскольку алгоритм управления должен компенсировать поверхность не на ровном месте посредством включения градусов отклонения от фактического уровня в ходе управления выравниванием по уровню. Обратная связь по CRS-углу осуществляется посредством одного или нескольких акселерометров(ов) оси или другого подобного датчика, с возможностью указывать угол относительно силы тяжести, предоставляющего градуированный электрический аналоговый или цифровой сигнал. Этот сигнал имеет достаточное разрешение для того, чтобы принимать обоснованные управляющие решения, связанные с обратной связью по CRS-углу. В идеале, угол спинки сиденья между 30 и 45 градусов относительно ровного места должен достигаться, когда CRS размещается в позиции, обращенной против движения.
Процесс установки начинается с цикла калибровки. Фиг. 15B является блок-схемой последовательности операций способа, иллюстрирующей цикл калибровки, адаптированный с возможностью использования в одном варианте осуществления CRS-люльки. Во-первых, пользователю инструктируется размещать CRS на земле в конкретной ориентации, параллельной большой оси транспортного средства. Угол земли относительно силы тяжести измеряется посредством акселерометра.
Второй вариант для определения угла при основании заключается в том, чтобы иметь контрольную шайбу, которая является независимо перемещаемой относительно CRS, но в состоянии обмениваться данными через провода или беспроводную связь. Эта шайба может быть размещена на ровной поверхности, такой как земля или днище транспортного средства, в ходе части калибровки установки. Шайба должна конструироваться таким образом, что целевая ориентация шайбы в ходе этого процесса калибровки является очевидной.
Третий соответствующий вариант для шайбы заключается в том, чтобы иметь опору, выдвигающуюся из CRS, адаптированную с возможностью зацепляться с днищем транспортного средства. Днище транспортного средства предположительно может быть ровным в качестве поверхности калибровки. Относительный угол между опорой в основании может быть использован для того, чтобы определять опорный угол. Алгоритмы выравнивания по уровню и натяжения, раскрытые в данном документе, также могут применяться к системе без механизма калибровки посредством инструктирования пользователю сначала заехать на автомобиле на ровную площадку, аналогично существующим инструкциям по установке.
Когда угол (θB) при основании определяется, CRS сравнивает θB с максимальным углом (θMax). Максимальный угол представляет собой предварительно установленное значение, которое представляет максимальный наклон, при котором может парковаться транспортное средство до того, как становится небезопасным устанавливать CRS. Если максимальный угол является слишком большим, CRS инструктирует пользователю перемещаться на более ровное место перед установкой CRS. Если наклон не превышает максимальное значение (θB<θMax), угол (θB) при основании записывается для использования в ходе установки. После этого пользователь оповещается в отношении того, что устройство готово к установке. В этот момент, пользователь размещает основание люльки на сиденье транспортного средства, прикрепляет соединительный ремень к LATCH-системе или другому крепежному механизму, такому как система ремней безопасности, и начинает процесс установки посредством нажатия кнопки активации, расположенной в пользовательском интерфейсе.
Один вариант осуществления алгоритма установки, как показано схематично на фиг. 15C, использует итеративный процесс, в котором подъем опоры и натяжение модифицируются с небольшими приращениями, чтобы приближаться к требуемому углу и уровню натяжения ремня. Фиг. 15C является блок-схемой последовательности операций способа, иллюстрирующей этот итеративный процесс.
Как описано выше, до того, как начинается процесс установки, CRS должна быть калибрована, чтобы определять угол (θB) места, в котором паркуется транспортное средство. После калибровки считываются показания множества системных датчиков, чтобы гарантировать то, что CRS является безопасной для использования. Эта уникальная функция в процессе автоматической установки позволяет системе предотвращать установку CRS, которая может быть небезопасной. Например, поскольку характеристики материалов ухудшаются (например, гистерезис полимеров) со временем, для каждой CRS во время изготовления задается дата истечения срока эксплуатации. Если текущая дата превышает дату истечения срока эксплуатации, CRS-контроллер может либо предупреждать пользователя, либо предотвращать установку согласно предварительно заданному набору правил. Аналогично, после того, как CRS попадает в аварию, даже если нет внешних видимых повреждений, внутреннее повреждение может означать, что сиденье является небезопасным. Посредством либо мониторинга акселерометра в плоскости X-Y, либо использования механического плавкого предохранителя, который постоянно деформируется, если подвергается действию силы, превышающей заданную величину, CRS-контроллер может определять, когда сиденье не должно более использоваться. В этом случае, CRS-система либо предупреждает пользователя, либо полностью предотвращает установку. Аналогично, CRS может оповещать пользователя в отношении того, что транспортное средство паркуется на таком крутом уклоне (выше 22 градусов), что небезопасно устанавливать CRS.
Необязательно, в этот момент, CRS-система управления может упрощать процесс установки посредством запрашивания метаданных от пользователя, таких как возраст, рост или вес ребенка, либо транспортного средства, в котором устанавливается сиденье, чтобы рекомендовать установку сиденья по ходу движения или против движения, где должны размещаться лямки, или самое безопасное место для того, чтобы устанавливать сиденье в этой модели транспортного средства. Альтернативно, рост или вес ребенка может быть определен посредством датчиков, ассоциированных с автомобильным сиденьем.
Если датчики указывают, что устройство является безопасным (Sn="Да"), то автоматизированная система переходит к следующему этапу установки. В этот момент, датчик считывает угол θ. θ является углом устройства относительно фактического уровня (например, уровня, перпендикулярного силе тяжести). Датчик предпочтительно является трехосным акселерометром, допускающим измерение этой ориентации.
Если θ меньше вычисленного уровня, и электромотор для выравнивания по уровню еще не активирован, отправляется сигнал в электромотор для включения. Включение электромотора увеличивает высоту опоры, в силу этого повышая θ. Вычисленный уровень равен углу θB калибровки плюс заданное значение перерегулирования. Значение перерегулирования означает то, что электромотор продолжает работать, поднимая основание выше ровной позиции. Когда θ равен вычисленному уровню, электромотор для выравнивания по уровню выключается.
После того, как электромотор для выравнивания по уровню выключается, натяжение (FT) ремня считывается посредством датчика натяжения. Возможные датчики натяжения включают в себя тензодатчик, манометр или другой механический датчик. В аналогичном контуре обратной связи, если сравнивать с процессом для электромотора для выравнивания по уровню, если FT меньше требуемого натяжения, электромотор продолжает работать до тех пор, пока не будет достигнуто требуемое натяжение. Поскольку натяжной механизм не допускает отвода назад, если FT превышает требуемое натяжение, установка является ошибочной и должна быть начата снова. В итеративном процессе, после того, как электромотор для натяжения выключается, еще раз измеряется угол θ для выравнивания по уровню. Если θ находится в пределах диапазона (предпочтительно заданного в пределах 5 градусов относительно θB), и FT не превышает требуемое натяжение, то система должна оповещать пользователя в отношении того, что установка завершена успешно. Если θ выше диапазона, электромотор для выравнивания по уровню включается, чтобы немного снижать θ. Когда электромотор для выравнивания по уровню выключается, электромотор для натяжения включается, чтобы увеличивать натяжение на ремнях до требуемого уровня. Тем не менее, если θ ниже требуемого диапазона, система должна оповещать пользователя в отношении того, что установка является неудачной.
Итеративный алгоритм выравнивания по уровню, описанный выше, является всего лишь одним из множества алгоритмов, в которых датчики и механизм выравнивания по уровню могут быть использованы автономно либо в сочетании с датчиками натяжения и механизмом для того, чтобы эффективно автоматически выравнивать по уровню CRS. Например, механизм и датчик выравнивания по уровню могут независимо выравнивать по уровню CRS. В этом случае, должен использоваться более простой алгоритм выравнивания по уровню, в котором высота подъемной опоры должна увеличиваться до тех пор, пока не будет достигнут требуемый заданный угол. Заданный угол может быть основан либо на установленном на заводе значении, либо на углу, определенном с использованием процедуры калибровки, описанной выше и проиллюстрированной на фиг. 15B. В случае предварительно установленного заводского значения, транспортному средству необходимо парковаться на относительно ровном месте. Как описано выше, процедура калибровки может быть использована для того, чтобы устанавливать основание сиденья, даже когда место не является ровным.
Альтернативно, датчик выравнивания по уровню может быть использован в комбинации исключительно с механизмом натяжения, за счет чего натяжение ремня непрерывно увеличивается до тех пор, пока датчики выравнивания по уровню не определят то, что CRS достигает корректного угла. Аналогично, механизм выравнивания по уровню может продолжать увеличивать подъем опоры до тех пор, пока не будет достигнуто заданное натяжение ремня, измеренное посредством датчика натяжения. В этом случае, механизм выравнивания по уровню регулируется исключительно в ответ на ввод из датчика натяжения. Следует понимать, что настоящее изобретение может быть использовано с любым из этих алгоритмов выравнивания по уровню.
Другой возможный автоматический алгоритм установки модифицирует уровень и натяжение независимо, чтобы размещать CRS в требуемой ориентации. В частности, процесс установки, который модифицирует подъем опоры и натяжение либо одновременно, либо последовательно, может быть полезным в определенных ситуациях. Например, CRS для использования с ISOFIX-системой может конструироваться с системой регулирования угла поворота поверх фиксированной рамы, так что устройство может сначала натягиваться, а затем выравниваться по уровню независимо. В этом случае, позиция вращательной рамы не оказывает влияния на натяжение в удерживающей системе. Следовательно, более простой алгоритм установки натягивания и затем регулирования угла является достаточным. Предпочтительно конструировать удерживающие LATCH-приспособления и вспомогательное оборудование таким способом, чтобы направлять силы как вниз к подушке сидения, так и назад к спинке сидения.
Пороговые значения для угла (θ) и натяжения (FT) ремня основаны на рекомендованных критериях NHTSA CRS-установки либо рекомендации других научных учреждений. Например, NHTSA рекомендует, чтобы натяжение в каждом LATCH-ремне составляло 53,5-67 Н (12-15 фунт-сила). Контроллер, реализованный с микроконтроллером, может быть перепрограммируемым и в силу этого обновляемым, когда обновляются критерии. Помимо этого, алгоритм может быть обновлен пользователем на основе опыта работы пользователя с CRS. Контроллер также может быть сконфигурирован с возможностью сохранять данные по использованию с возможностью загружать и анализировать данные изготовителем в автономном режиме.
Другая стандартная ошибка при CRS-установке возникает, когда пользователи некорректно скручивают тесемчатый ремень удерживающего LATCH-приспособления при его закреплении в привязных креплениях. Когда CRS-контроллер определяет это состояние, он может предупреждать пользователя и предотвращать установку. Один вариант для определения того, что удерживающее приспособление скручивается, заключается в том, чтобы встраивать в материал тесемчатого ремня провода, такие как пьезоэлементы. Вследствие стоимости и сложности этого решения, предпочтительный вариант осуществления представляет собой комбинацию механических направляющих, которые запрещают скручивание тесемчатого ремня удерживающего LATCH-приспособления, и датчиков, которые определяют, когда удерживающие LATCH-приспособления ориентируются корректно в точках присоединения креплений транспортного средства.
Дополнительно предусмотрено, что CRS-система управления имеет возможность определять то, присутствует или нет ребенок на сиденье. Датчики, допускающие определение ребенка, включают в себя одно или более из датчика веса в люльке для младенцев, датчика для определения того, застегнута или нет привязная лямка, либо теплового датчика, видеодатчика или тензодатчика для непосредственного измерения ребенка. Соответственно, каждый раз, когда система определяет то, что ребенок располагается на сиденье, интерфейс может предоставлять обратную связь сопровождающему по готовности и безопасности CRS. Такая обратная связь может включать в себя, но не только, подтверждение того, что сиденье имеет надлежащий уровень, что удерживающая система для транспортного средства имеет надлежащее натяжение, что ручка люльки для младенцев находится в корректной позиции, что удерживающие LATCH-приспособления не скручены, что детские удерживающие приспособления имеют надлежащее натяжение, или что детские удерживающие приспособления имеют надлежащую высоту. Если какой-либо ввод считается небезопасным посредством системы, система может оповещать сопровождающего или необязательно проводить регулировки. Дополнительно система управления может предоставлять обратную связь об условиях транспортного средства, таких как температура, и необязательно оповещать, если условия считаются небезопасными. Этот процесс может выполняться в люльке для младенцев, обращенной против движения, каждый раз, когда определено, что люлька для младенцев соединена с основанием.
Важно, чтобы эта проверка проводилась каждый раз, когда ребенок размещается на сиденье, поскольку даже условия, которые проверены в ходе процесса установки, могут изменяться со временем. Например, очень часто CRS, которая устанавливается в системе пассажирских ремней безопасности, случайно отсоединяется, когда ремень безопасности расстегивается. Автоматическая CRS может быть сконфигурирована с датчиком натяжения ремня безопасности, расположенным на CRS-основании, чтобы предупреждать пользователя, когда ремень безопасности расстегивается. Когда установлен корректно, ремень безопасности проходит через датчик натяжения ремня безопасности и прикладывает силу против CRS-основания. Когда ремень является слишком свободным или расстегнутым полностью, натяжение против CRS-основания снижается. В этом случае, CRS предупреждает пользователя в отношении того, что CRS является небезопасной для использования и должна быть установлена снова. Компоновка датчика натяжения ремня безопасности является аналогичной компоновке автоматических механизмов натяжения, как проиллюстрировано на фиг. 9.
Другая типичная проблема состоит в том, что гистерезис пеноматериала сиденья транспортного средства изменяется во времени, вызывая натяжение в LATCH-лямках, а также изменение угла CRS. В этом случае, CRS-контроллер может либо оповещать пользователя, либо активировать одну или более приводных систем для натяжения или выравнивания по уровню, чтобы устранять проблему.
Когда проверка осуществляется, если определяется ребенок, CRS-система управления может выдавать рекомендации пользователю на основе метаданных, а именно, предварительно заданных правил. Например, если определяется, что ребенок легче определенного веса или ниже определенного роста, система может рекомендовать установку сиденья в ориентации, обращенной против движения. Если общий вес превышает рекомендованное ограничение по весу для LATCH, CRS-контроллер может рекомендовать использование ремня безопасности в транспортном средстве. Если текущая дата превышает дату истечения срока эксплуатации, запрограммированную на заводе, может выдаваться предупреждение. Если система определяет силы, указывающие на аварию, которая, возможно, повредила CRS, сопровождающий может оповещаться, так что ребенок не укладывается на небезопасное сиденье.
CRS-интерфейс может собирать информацию по росту и весу присутствующего ребенка. Оптические датчики или контактные датчики на варьирующихся высотах могут определять высоту плеч ребенка, которая может быть использована для того, чтобы передавать обратную связь сопровождающему по надлежащему использованию CRS. Необязательно, высота удерживающих приспособлений может регулироваться автоматически или сопровождающим с помощью механизма с электромотором. Поскольку рекомендованная высота системы зависит не только от роста ребенка, но и от ориентации CRS, CRS может быть оснащена датчиками, включающими в себя, но не только, один или более датчиков давления в основании либо акселерометр, чтобы определять то, установлена она по ходу движения или против движения.
Одна задача при конструировании коммерчески целесообразного сиденья с электронными схемами заключается в уменьшении нагрузки на сопровождающего по поддержанию достаточного уровня зарядки аккумулятора. Элементы предоставления питания CRS проиллюстрированы на фиг. 16. В простейшей конфигурации CRS включает в себя аккумулятор 98 для предоставления мощности в электромоторы и множество датчиков. Аккумулятор 98 расположен внутри основания 12 люльки. Аккумулятор может быть съемным с основания и перезаряжаемым. Помимо этого, CRS может быть сконфигурирована с возможностью принимать мощность из штепсельной розетки транспортного средства (например, прикуривателя). В этом случае, CRS-основание должно включать в себя гнездовой разъем для приема адаптера источника питания. Мощность от адаптера может питать CRS в ходе установки или перезаряжать аккумулятор. Согласно варианту осуществления CRS, проиллюстрированному на фиг. 16, CRS-основание дополнительно содержит самогенерирующий механизм 96 выработки электроэнергии, соединенный с аккумулятором 98 и множеством датчиков CRS. Поскольку CRS монтируется на передвижной платформе (например, на автомобиле), механизм выработки электроэнергии подвергается действию сил по мере того, как транспортное средство едет. Линейный генератор является очень простым вариантом для выработки электроэнергии из движения транспортного средства. Магнит, внутренний для CRS-основания, может проходить через катушку, которая генерирует электричество, которое может накапливаться в аккумуляторе. Альтернативно, могут использоваться другие известные механизмы для выработки электроэнергии, к примеру, маятниковый или пьезоэлектрический элемент.
CRS может быть сконфигурирована с двухуровневой системой для потребления мощности. Одна система используется только для мониторинга системных параметров и управления пользовательским интерфейсом. Эта система конструируется с возможностью иметь очень низкий уровень мощности. Вторая система электропитания используется для того, чтобы приводить в действие электромоторы в процессе установки и, следовательно, использует больше энергии. Источник питания для первой системы предпочтительно должен быть аккумулятором. Источник питания для второй системы может быть отдельным аккумулятором либо может представлять собой входную мощность из гнезда питания транспортного средства. Эта вторичная или резервная система гарантирует, что мощность сохраняется для пользовательского интерфейса.
В одном варианте осуществления, CRS-контроллер дополнительно включает в себя пользовательский интерфейс, чтобы принимать пользовательский ввод, чтобы инициировать процедуры настройки и установки. Как проиллюстрировано на фиг. 17, компоненты пользовательского интерфейса собираются в дискретном комплекте, представляющем "центр управления". Центр 90 управления расположен на стороне основания 12 люльки для младенцев. Согласно одному варианту осуществления, пользовательский интерфейс представляет собой видеодисплей, включающий в себя кнопки 92 управления установкой для активации и направления процесса установки. Необязательно, интерфейс также включает в себя клавишную панель, сенсорный экран, систему распознавания речи, пульт дистанционного управления или другие вводы. Другие вводы позволяют пользователю вводить метаданные о ребенке, чтобы приспосабливать установку к характеристикам конкретного ребенка (таким как рост, вес, возраст). CRS-контроллер может взаимодействовать через проводное соединение или в беспроводном режиме с мобильными мультимедийными устройствами (такими как смартфоны, переносные компьютеры, планшетные PC и т.д.) для управления и обратной связи.
Одна уникальная функция CRS-системы заключается в способности непрерывно отслеживать CRS и предоставлять информацию касательно безопасности CRS пользователю в реальном времени. Чтобы достигать этой цели, центр 90 управления дополнительно включает в себя индикаторы 94 безопасности. Индикаторы предоставляют пользователю обратную связь в отношении состояния CRS-установки и общей безопасности CRS. Эти данные ретранслируются в CRS-контроллер и центр управления из множества датчиков, расположенных в CRS. Ретранслируемая информация может включать в себя подтверждение того, что соединители корректно стопорятся в LATCH-системе на сиденье транспортного средства, информацию относительно натяжения ремня, выравнивания по уровню CRS, и/или подтверждение того, что люлька корректно присоединена к основанию. Согласно одному варианту осуществления, обратная связь является визуальной в любой форме светодиодов. Компоненты пользовательского интерфейса также могут быть распределены в CRS в стратегических местоположениях (т.е. светодиоды, указывающие надлежащее защелкивание ремня, размещены около местоположений защелкивания). Индикаторы с обратной связью альтернативы включают в себя ЖК-дисплей или устройства со звуковой и/или тактильной обратной связью.
CRS-контроллер также может направлять переустановку CRS-основания, если датчики мониторинга указывают, что установка более не является корректной (например, основание более не расположено ровно, или ремни ослаблены). Согласно алгоритму мониторинга и переустановки, данные получаются из датчика уровня. Если CRS расположена неровно, подъем опоры и натяжение ремня регулируются согласно итеративному процессу, описанному выше.
В дополнение к центру управления CRS-контроллер необязательно может обмениваться данными с пользователем через проводное соединение или беспроводное соединение с бортовым компьютером транспортного средства, чтобы интегрировать данные из пользовательского интерфейса в систему управления транспортного средства или предоставлять их во внешнюю систему, такую как OnStar.
Согласно другому варианту осуществления центра управления CRS, центр управления располагается на съемной люльке для младенцев, а не на основании, для повышения удобства для пользователя. В этом случае, питание и связь могут передаваться из основания в люльку посредством общего сопряженного фальш-соединителя, такого как соединитель с вилочными и плоскими контактами или набор контактных пластин. За счет такого соединения, информация относительно позиции рукоятки люльки может считываться и включаться в интерфейс, так что пользователь может быть предупрежден, если он не находится в рекомендованной изготовителем позиции для использования, или передаваться далее в основание для дополнительной обработки посредством системы управления. Один вариант осуществления соединения питания проиллюстрирован на фиг. 18.
CRS дополнительно содержит люльку для младенцев, адаптированную с возможностью соединяться с основанием люльки. Фиг. 19, 20A и 20B являются схематичными чертежами защелкивающего механизма для соединения люльки 100 с основанием 12. Защелкивающий механизм содержит зуб 102 соединителя основания на основании 12, адаптированный с возможностью окружать и удерживать штангу 104 люльки 100. Фиг. 19 является схематичным чертежом люльки, присоединяемой к основанию, с видом в частичном сечении защелкивающего механизма. Фиг. 20A и 20B является схематичными чертежами защелкивающего механизма, отсоединенного от люльки и основания. Как показано на каждом чертеже, защелкивающий фиксатор дополнительно содержит металлодетекторный датчик 106 для идентификации присутствия штанги из CRS-соединителя. На основе данных из датчика защелкивающихся фиксаторов, центр 90 управления оповещает пользователя, когда люлька 100 и основание 12 корректно соединяются между собой. Необязательно, люлька и основание также соединяются посредством соединения питания. Как показано на фиг. 18, основание 12 включает в себя гнездовой разъем 110 питания, который соединяется с разъемом 112 питания на люльке 100 для младенцев. Соединение предоставляет питание в датчики и позволяет данным из датчиков, расположенных на люльке, передаваться в CRS-контроллер и пользовательский интерфейс. В варианте осуществления CRS, проиллюстрированном на фиг. 18, центр 120 управления расположен на люльке 100. Альтернативно, центр управления может быть отдельным электронным модулем, обменивающимся данными с контроллером детского сиденья проводным или беспроводным способом.
Со ссылкой на фиг. 21, другое приспособление, необязательно включенное в CRS, представляет собой удерживающее приспособление, содержащее механизм 130 натяжения с электромотором для привязной лямки 132 для младенцев. Тесемчатый ремень 132 привязной лямки наматывается через механизм 130 натяжения с электромотором, чтобы натягивать или ослаблять привязную лямку 132. Привязная лямка 132 закрепляет ребенка в люльке 100 для младенцев. В привязную лямку включены датчики 134 натяжения привязных лямок для того, чтобы измерять натяжение относительно ребенка. Датчики, которые могут быть использованы для этой цели, включают в себя тензодатчики, манометры или другие типы механических датчиков.
Другой признак, необязательно включенный в люльку для младенцев, представляет собой механизм автоматического регулирования высоты. Фиг. 22 является схематичным чертежом задней части люльки 100 для младенцев с механизмом регулирования высоты для регулирования высоты привязной лямки 132 на основе размера ребенка. Люлька содержит винт 140 регулирования высоты привязной лямки, присоединяемый к механизму 142 электромотора для регулирования высоты. Привязная лямка 132 наматывается через направляющую привязной лямки, присоединенную к винту 140, который соединяется с механизмом 142 электромотора. Винт 140 используется для того, чтобы регулировать высоту привязной лямки посредством поднимания или опускания направляющей привязной лямки и привязной лямки 132. Датчик 144 для определения корректной позиции привязной лямки для ребенка включается в люльку 100, чтобы измерять высоту ребенка и определять корректный уровень для привязной лямки, на основе этого измерения.
Вариант полностью интеллектуальной и автоматизированной CRS-системы с фиг. 23-28 представляет собой интеллектуальное защелкивающее устройство, которое может быть сконфигурировано с возможностью использования с существующей CRS 400. Интеллектуальная удерживающая система либо может заменять существующие LATCH-соединители, включенные в детское автомобильное сиденье, либо может располагаться между существующими CRS LATCH-соединителями и точками присоединения креплений транспортного средства. В любом случае, по-прежнему применяется по большей части технология, идентичная технологии, описанной выше. Предпочтительный вариант осуществления для привода для натяжения представляет собой храповую систему с ручным управлением в обход автоматики для сброса натяжения тесемчатого ремня (см. фиг. 14). Система содержит ремень 402, формирующий контур для прикрепления к CRS 400. Крепление 404 механизма защелкивания и натяжения с электромотором повышает натяжение ремня, чтобы удерживать CRS на месте.
Более конкретно и со ссылкой на фиг. 24-27, один вариант осуществления крепления 404 механизма защелкивания и натяжения включает в себя шпиндель 414, поворачиваемый посредством зубчатой передачи 418 и приводимый в действие посредством электромотора 420. Электромотор 420, зубчатая передача 418 и шпиндель 414 расположены в креплении 404 и вмонтированы в корпус в крышке 412 электромотора/шпинделя и крышке 419 зубчатой передачи, соответственно. Ремень 402 наматывается вокруг шпинделя 414. Направляющие 408 тесемчатого ремня, расположенные на внешних сторонах крышки 412 электромотора/шпинделя, направляют ремень 402 в/из шпинделя 414 через прорези 410 в крышке 412 электромотора/шпинделя. Натяжение ремня 402 повышается по мере того, как наматывается шпиндель 414. Электромотор 420 может быть электрическим или иметь любой другой подходящий тип, к примеру, гидравлический. Конец 416 шпинделя выходит за пределы крышки 412 электромотора/шпинделя и может поворачиваться вручную пользователем, чтобы регулировать натяжение ремня 402.
Как показано на фиг. 23, соединитель 406 соединяется с креплением 404 механизма защелкивания и натяжения с электромотором. Соединитель 406 сконфигурирован с возможностью прикрепления к CRS LATCH-системе. Датчики, к примеру, тензодатчики, могут определять, когда соединители, расположенные на каждой стороне CRS, натягиваются до корректного натяжения. Левая и правая стороны предпочтительно должны соединяться между собой электронно таким образом, что они могут синхронизироваться в ходе процесса установки. Необязательно может быть предусмотрен пользовательский интерфейс, чтобы предоставлять обратную связь, включающую в себя то, что защелкивающие фиксаторы зацепляются со стяжными креплениями транспортного средства, что натяжение в ремнях является корректным, уровень зарядки аккумулятора и т.д. Пользовательский интерфейс также необязательно может направлять пользователя посредством процесса установки посредством запрашивания метаданных и предоставления аудио- или видеоинструкций. Аналогично силовому механизму для полной CRS, описанной выше, защелкивающее устройство может снабжаться питанием автономно посредством генератора, приведенного в действие посредством движения транспортного средства.
Фиг. 28 является блок-схемой последовательности операций способа, иллюстрирующей этапы, осуществляемые посредством интеллектуального защелкивающего устройства для увеличения натяжения ремня 402. Аналогично другим алгоритмам, используемым в CRS, данные из множества датчиков получаются, чтобы определять то, может или нет CRS быть безопасно установлена (например, транспортное средство находится в пределах приемлемого диапазона выравнивания, CRS является конструктивно прочной, и соединители защелкнуты на LATCH-системе или на ремне безопасности). Если CRS является безопасной (Sn="Да"), получаются показания датчика натяжения на ремне. Если натяжение (FT) меньше требуемого натяжения (FSP), то электромотор для натяжения включается. Электромотор остается включенным до тех пор, пока FT не станет равен (или в приемлемом диапазоне) FSP. В этой точке электромотор для натяжения выключается. Пользователь оповещается о том, что натяжение ремня является корректным.
Хотя изобретение подробно описано в целях иллюстрации на основе того, что в настоящее время считается наиболее практически полезными и предпочтительными вариантами осуществления, следует понимать, что такие подробности служат исключительно для этой цели, и что изобретение не ограничено раскрытыми вариантами осуществления, а, наоборот, имеет намерение охватывать модификации и эквивалентные компоновки. Например, следует понимать, что настоящее изобретение предполагает то, что в максимально возможной степени один или более признаков любого варианта осуществления могут быть комбинированы с одним или более признаков любого другого варианта осуществления.
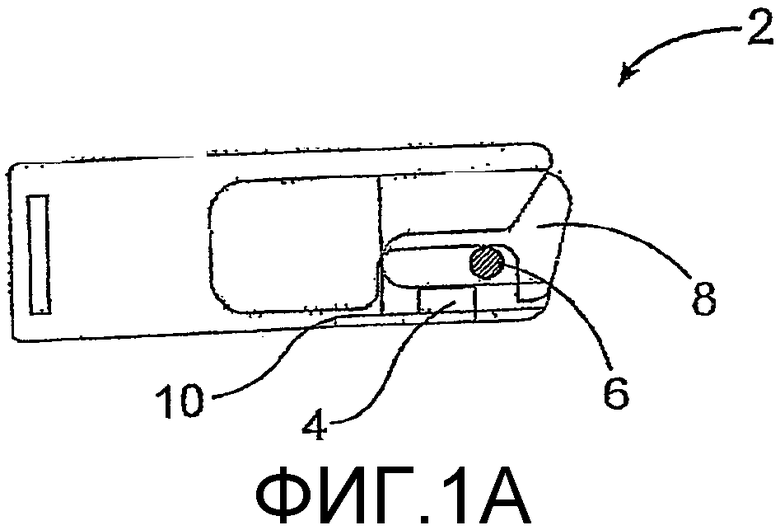








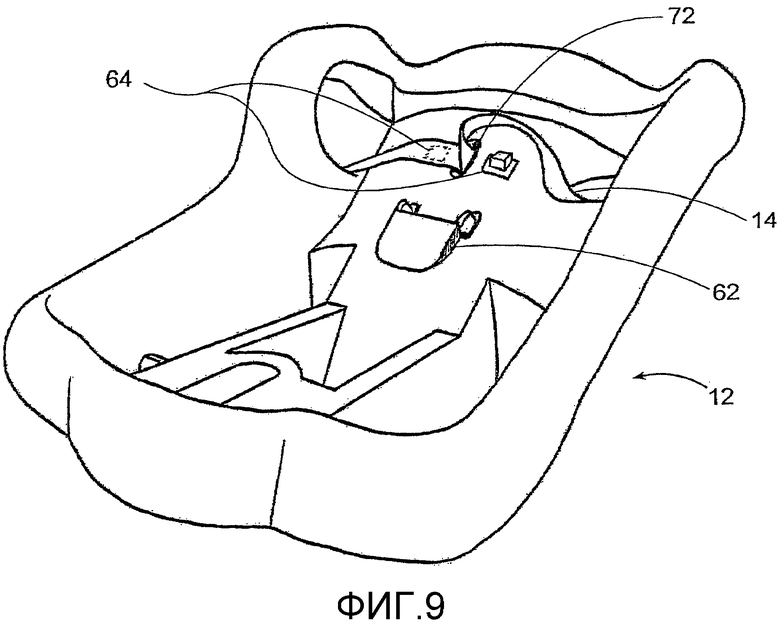









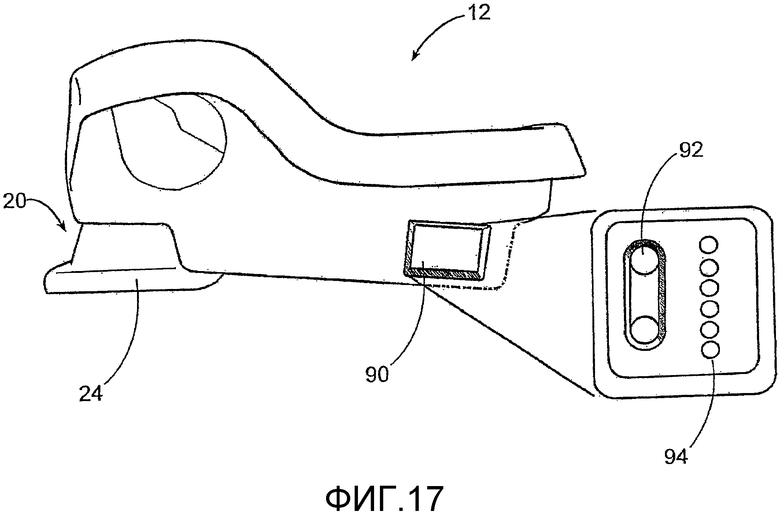
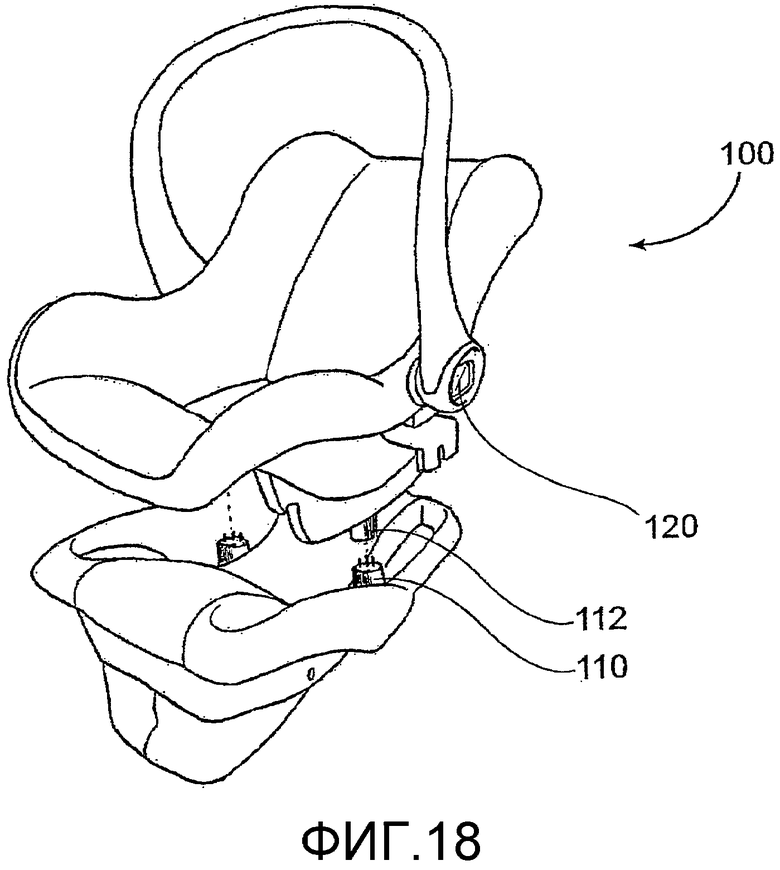
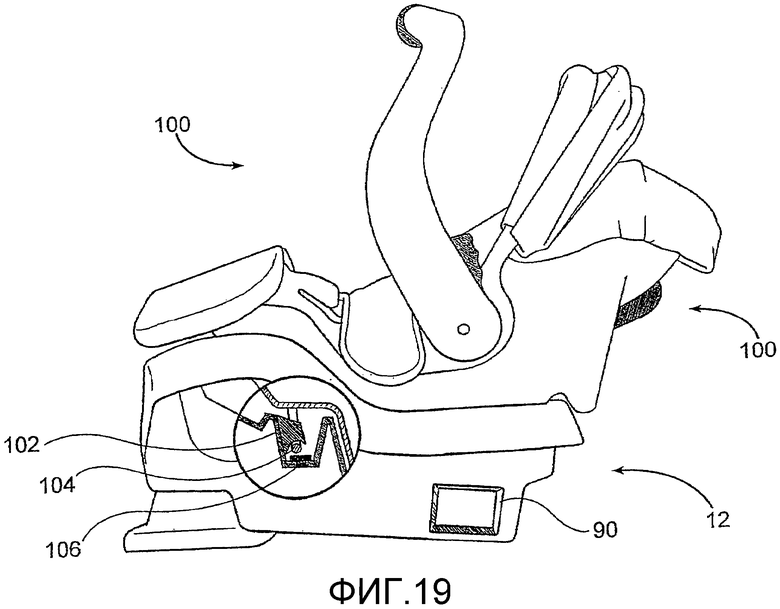
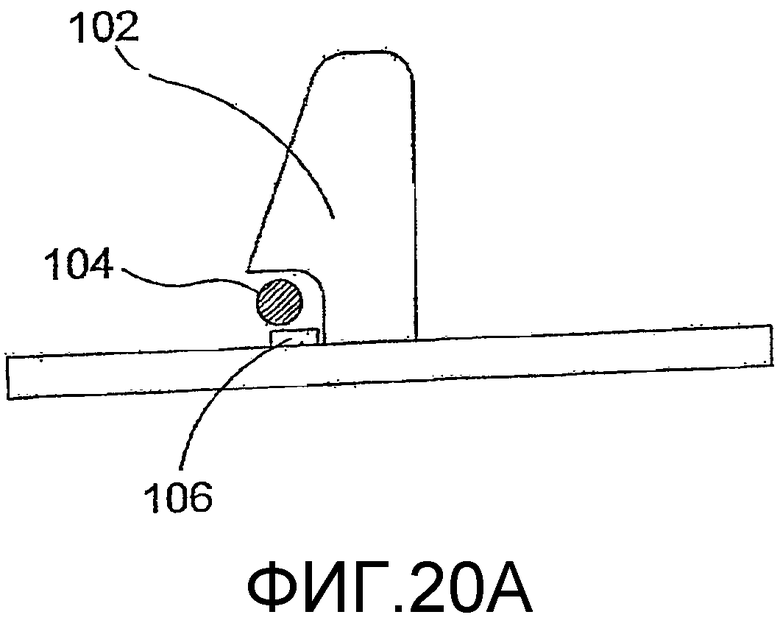

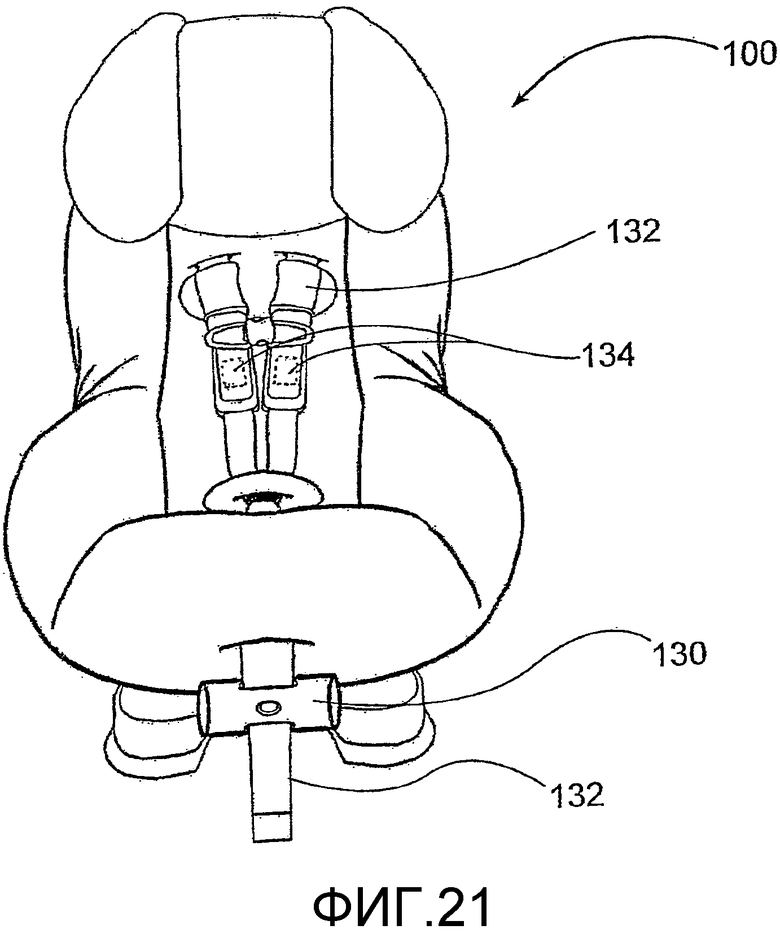


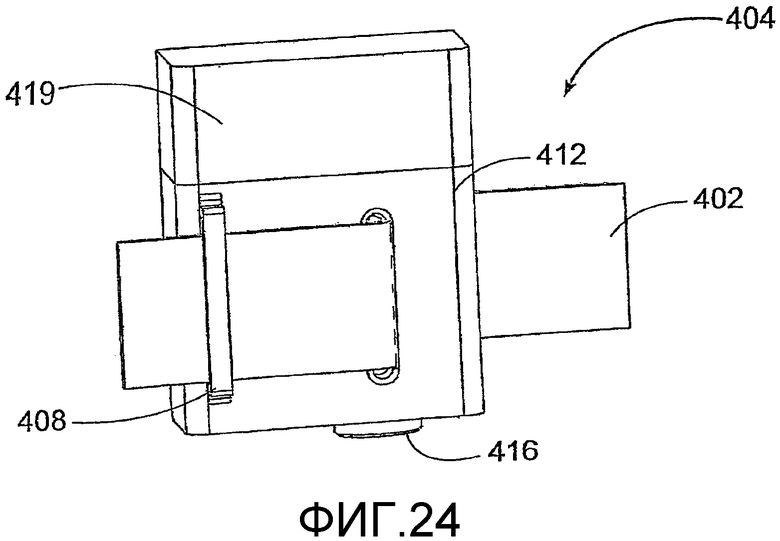


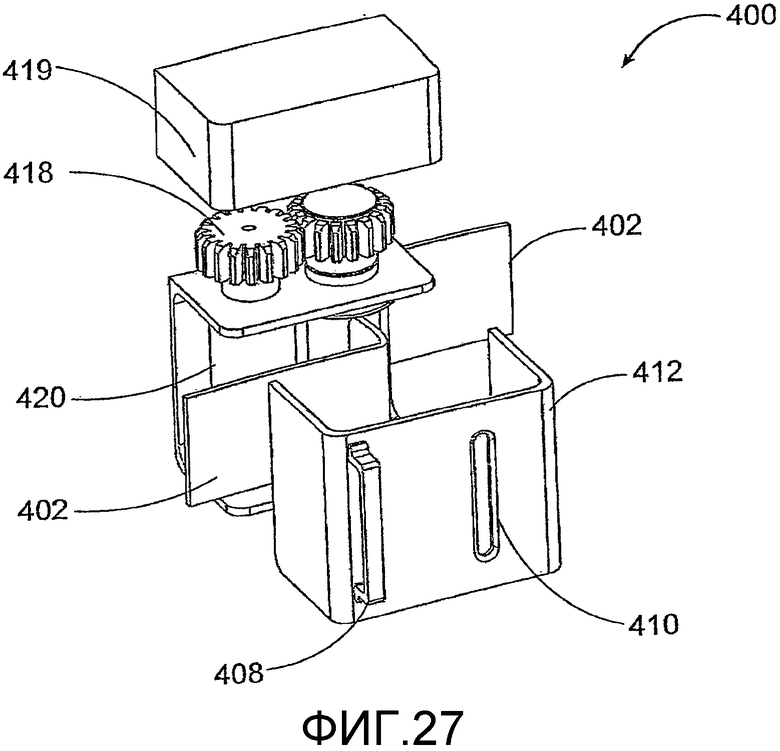

Группа изобретений относится к детским автомобильным сиденьям или детской удерживающей системе для использования в автомобиле. Детское сиденье, выполненное с возможностью закрепления на сидении транспортного средства, содержит основание сиденья, закрепляемое на сидении транспортного средства, часть для размещения ребенка, поддерживаемую основанием сиденья, систему натяжения ремня, включенную в основание сиденья для приема ремня, который соединяет основание сиденья с сиденьем транспортного средства, систему выравнивания по уровню, включенную в основание сиденья для выравнивания по уровню основания сиденья относительно сиденья транспортного средства, и контроллер, функционально соединенный с системой натяжения ремня и системой выравнивания по уровню. Контроллер активирует систему натяжения ремня и систему выравнивания по уровню таким образом, что система натяжения ремня натягивает ремень до заданного натяжения, и система выравнивания по уровню выравнивает по уровню основание сиденья до заданного угла относительно сиденья транспортного средства. Достигается повышение безопасности перевозки ребенка в детском кресле. 5 н. и 32 з.п. ф-лы, 28 ил.
1. Детское сиденье, выполненное с возможностью закрепления на сидении транспортного средства и содержащее:
основание сиденья, закрепляемое на сидении транспортного средства;
часть для размещения ребенка, поддерживаемую основанием сиденья;
систему натяжения ремня, включенную в основание сиденья для приема ремня, который соединяет основание сиденья с сиденьем транспортного средства;
систему выравнивания по уровню, включенную в основание сиденья для выравнивания по уровню основания сиденья относительно сиденья транспортного средства; и
контроллер, функционально соединенный с системой натяжения ремня и системой выравнивания по уровню,
при этом контроллер активирует систему натяжения ремня и систему выравнивания по уровню таким образом, что система натяжения ремня натягивает ремень до заданного натяжения, и система выравнивания по уровню выравнивает по уровню основание сиденья до заданного угла относительно сиденья транспортного средства.
2. Детское сиденье по п. 1, в котором контроллер активирует систему натяжения ремня и систему выравнивания по уровню итеративно.
3. Детское сиденье по п. 1, в котором контроллер активирует систему натяжения ремня и систему выравнивания по уровню одновременно.
4. Детское сиденье по п. 1, в котором контроллер активирует систему натяжения ремня и систему выравнивания по уровню последовательно.
5. Детское сиденье по п. 1, в котором ремень, принимаемый системой натяжения ремня, представляет собой, по меньшей мере, одно из ремня безопасности транспортного средства или ремня LATCH-системы.
6. Детское сиденье по п. 1, выбранное из группы, состоящей из: люлек для младенцев, обращенных против движения; откидных детских сидений, обращенных по ходу движения и против движения; и дополнительных подушек для детского сиденья с привязными лямками.
7. Детское сиденье по п. 1, дополнительно содержащее:
по меньшей мере, один датчик для определения натяжения ремня, принимаемого посредством системы натяжения ремня; и
по меньшей мере, один датчик для определения угла основания сиденья относительно сиденья транспортного средства.
8. Детское сиденье по п. 7, в котором, по меньшей мере, один датчик для определения натяжения и, по меньшей мере, один датчик для определения угла функционально соединены с контроллером.
9. Детское сиденье по п. 8, в котором контроллер активирует систему натяжения ремня и систему выравнивания по уровню таким образом, что система натяжения ремня натягивает ремень до заданного натяжения, и система выравнивания по уровню выравнивает по уровню основание сиденья до заданного угла относительно сиденья транспортного средства на основе обратной связи от, по меньшей мере, одного датчика для определения натяжения и, по меньшей мере, одного датчика для определения угла.
10. Детское сиденье по п. 1, дополнительно содержащее пользовательский интерфейс, размещенный на, по меньшей мере, одном из основания сиденья или части для размещения ребенка, чтобы позволять пользователю инициировать систему натяжения ремня и систему выравнивания по уровню.
11. Детское сиденье по п. 10, в котором пользовательский интерфейс предоставляет пользователю обратную связь относительно состояния детского сиденья.
12. Детское сиденье по п. 1, в котором система выравнивания по уровню выполнена с возможностью поднятия и опускания опоры, соединенной с нижней поверхностью основания сиденья.
13. Детское автомобильное сиденье, содержащее:
основание сиденья, закрепляемое на сидении транспортного средства;
люльку для младенцев, съемным образом соединяемую с основанием сиденья;
по меньшей мере, одно из системы натяжения ремня, включенной в основание сиденья для приема ремня, который соединяет основание сиденья с сиденьем транспортного средства, и системы выравнивания по уровню, включенной в основание сиденья для выравнивания по уровню основания сиденья относительно сиденья транспортного средства; и
контроллер, функционально соединенный с, по меньшей мере, одним из системы натяжения ремня и системы выравнивания по уровню,
при этом контроллер активирует, по меньшей мере, одно из системы натяжения ремня и системы выравнивания по уровню таким образом, что система натяжения ремня натягивает ремень до заданного натяжения, и система выравнивания по уровню выравнивает по уровню основание сиденья до заданного угла относительно сиденья транспортного средства.
14. Детское автомобильное сиденье, содержащее:
основание сиденья, закрепляемое на сидении транспортного средства;
часть для размещения ребенка, поддерживаемую основанием сиденья;
по меньшей мере, одно из системы натяжения ремня, включенной в основание сиденья для приема ремня, который соединяет основание сиденья с сиденьем транспортного средства, и системы выравнивания по уровню, включенной в основание сиденья для выравнивания по уровню части для размещения ребенка относительно сиденья транспортного средства;
контроллер, функционально соединенный с, по меньшей мере, одним из системы натяжения ремня и системы выравнивания по уровню; и
интерфейсное устройство, установленное на, по меньшей мере, одном из основания сиденья или части для размещения ребенка и функционально соединенное с контроллером для выдачи пользователю индикатора того, что основание сиденья надлежащим образом закреплено на сидении транспортного средства, каждый раз, когда часть для размещения ребенка соединяется с основанием сиденья;
при этом контроллер активирует, по меньшей мере, одно из системы натяжения ремня и системы выравнивания по уровню таким образом, что система натяжения ремня натягивает ремень до заданного натяжения, и система выравнивания по уровню выравнивает по уровню часть для размещения ребенка до заданного угла относительно сиденья транспортного средства.
15. Детское автомобильное сиденье по п. 14, в котором интерфейсное устройство содержит дисплей, выдающий пользователю визуальный индикатор того, что основание сиденья надлежащим образом закреплено на сидении.
16. Детское автомобильное сиденье по п. 14, дополнительно содержащее, по меньшей мере, один датчик, связанный с, по меньшей мере, одним из основания сиденья и части для размещения ребенка и выполненный с возможностью определения того, имеет или нет часть для размещения ребенка надлежащий уровень, имеет или нет ремень, закрепляющий основание сиденья на сиденье транспортного средства, надлежащее натяжение, находится или нет ручка части для размещения ребенка в корректной позиции, скручены или нет ремни, закрепляющие основание сиденья на сиденье транспортного средства, имеет или нет привязная лямка, закрепляющая ребенка в части для размещения ребенка, надлежащее натяжение и надлежащую высоту, или любую комбинацию вышеперечисленного.
17. Детское автомобильное сиденье по п. 16, в котором контроллер функционально соединен с, по меньшей мере, одним датчиком и выполнен с возможностью вывода в интерфейсное устройство индикатора того, что основание сиденья надлежащим образом закреплено на сидении транспортного средства.
18. Детское автомобильное сиденье по п. 17, в котором индикатор того, что основание сиденья надлежащим образом закреплено на сидении транспортного средства, содержит индикатор того, что часть для размещения ребенка имеет надлежащий уровень, что ремень, закрепляющий основание сиденья на сиденье транспортного средства, имеет надлежащее натяжение, что ручка части для размещения ребенка находится в корректной позиции, что ремни, закрепляющие основание сиденья на сиденье транспортного средства, не скручены, что привязная лямка, закрепляющая ребенка в части для размещения ребенка, имеет надлежащее натяжение и надлежащую высоту, или любую комбинацию вышеперечисленного.
19. Детское автомобильное сиденье по п. 14, в котором ремень, принимаемый посредством системы натяжения ремня, представляет собой, по меньшей мере, одно из ремня безопасности транспортного средства или ремня LATCH-системы.
20. Детское автомобильное сиденье по п. 14, дополнительно содержащее, по меньшей мере, одно из: по меньшей мере, одного датчика для определения натяжения ремня, принимаемого системой натяжения ремня, и, по меньшей мере, одного датчика для определения угла части для размещения ребенка относительно сиденья транспортного средства.
21. Детское автомобильное сиденье по п. 20, в котором упомянутые, по меньшей мере, один датчик для определения натяжения и, по меньшей мере, один датчик для определения угла функционально соединены с контроллером.
22. Детское автомобильное сиденье по п. 21, в котором контроллер активирует систему натяжения ремня и систему выравнивания по уровню таким образом, что система натяжения ремня натягивает ремень до заданного натяжения, и система выравнивания по уровню выравнивает по уровню часть для размещения ребенка до заданного угла относительно сиденья транспортного средства на основе обратной связи от упомянутых, по меньшей мере, одного датчика для определения натяжения и, по меньшей мере, одного датчика для определения угла.
23. Детское автомобильное сиденье, содержащее:
основание сиденья, закрепляемое на сидении транспортного средства;
часть для размещения ребенка, поддерживаемую основанием сиденья;
по меньшей мере, один датчик, связанный с, по меньшей мере, одним из части для размещения ребенка или основания сиденья;
по меньшей мере, одно из системы натяжения ремня, включенной в основание сиденья для приема ремня, который соединяет основание сиденья с сиденьем транспортного средства, и системы выравнивания по уровню, включенной в основание сиденья для выравнивания по уровню части для размещения ребенка относительно сиденья транспортного средства;
контроллер, функционально соединенный с, по меньшей мере, одним из системы натяжения ремня и системы выравнивания по уровню; и
интерфейсное устройство, установленное на, по меньшей мере, одном из основания сиденья или части для размещения ребенка и выполненное с возможностью направления пользователя в процессе установки детского автомобильного сиденья на транспортном средстве посредством запрашивания информации от, по меньшей мере, одного датчика, выдачи, по меньшей мере, одного из аудио- или видеоинструкций относительно процесса установки и выдачи пользователю индикатора того, что основание сиденья надлежащим образом закреплено на сидении транспортного средства, каждый раз, когда часть для размещения ребенка соединяется с основанием сиденья;
при этом контроллер активирует, по меньшей мере, одно из системы натяжения ремня и системы выравнивания по уровню во время процесса установки таким образом, что система натяжения ремня натягивает ремень до заданного натяжения, и система выравнивания по уровню выравнивает по уровню часть для размещения ребенка до заданного угла относительно сиденья транспортного средства.
24. Детское автомобильное сиденье по п. 23, в котором, по меньшей мере, один датчик, связанный с, по меньшей мере, одним из части для размещения ребенка и основания сиденья, выполнен с возможностью определения того, имеет или нет часть для размещения ребенка надлежащий уровень, имеет или нет ремень, закрепляющий основание сиденья на сиденье транспортного средства, надлежащее натяжение, находится или нет ручка части для размещения ребенка в корректной позиции, скручены или нет ремни, закрепляющие основание сиденья на сиденье транспортного средства, имеет или нет привязная лямка, закрепляющая ребенка в части для размещения ребенка, надлежащее натяжение и надлежащую высоту, или любую комбинацию вышеперечисленного.
25. Детское автомобильное сиденье по п. 23, в котором контроллер направляет пользователя в процессе установки детского автомобильного сиденья на транспортном средстве посредством запрашивания информации от, по меньшей мере, одного датчика, связанного с, по меньшей мере, одним из основания сиденья и части для размещения ребенка, и выдачи, по меньшей мере, одного из аудио- или видеоинструкций через интерфейсное устройство.
26. Детское сиденье, выполненное с возможностью закрепления на сидении транспортного средства и содержащее:
основание сиденья, закрепляемое на сидении транспортного средства;
часть для размещения ребенка, поддерживаемую основанием сиденья;
по меньшей мере, одно из системы натяжения ремня, включенной в детское сиденье для приема ремня, который соединяет детское сиденье с сиденьем транспортного средства, и системы выравнивания по уровню, включенной в детское сиденье для выравнивания по уровню части для размещения ребенка относительно сиденья транспортного средства;
контроллер, функционально соединенный с, по меньшей мере, одним из системы натяжения ремня и системы выравнивания по уровню и активирующий, по меньшей мере, одно из системы натяжения ремня и системы выравнивания по уровню; и,
по меньшей мере, одно интерфейсное устройство, функционально соединенное с контроллером;
при этом система натяжения ремня натягивает ремень до заданного натяжения, а система выравнивания по уровню выравнивает по уровню часть для размещения ребенка до заданного угла относительно сиденья.
27. Детское сиденье по п. 26, дополнительно содержащее, по меньшей мере, один датчик, соединенный или связанный с детским сиденьем и функционально соединенный с контроллером.
28. Детское сиденье по п. 27, в котором контроллер выполнен с возможностью выдачи, по меньшей мере, одного из инструкций по установке и обновлений состояния посредством интерфейсного устройства, причем контроллер выбирает, по меньшей мере, одно из инструкций по установке и обновлений состояния на основе обратной связи от, по меньшей мере, одного датчика или ввода пользователем.
29. Детское сиденье по п. 26, в котором, по меньшей мере, одно интерфейсное устройство установлено на, по меньшей мере, одном из основания сиденья и части для размещения ребенка.
30. Детское сиденье по п. 26, в котором, по меньшей мере, одно интерфейсное устройство представляет собой отдельное мобильное мультимедийное устройство.
31. Детское сиденье по п. 26, в котором контроллер функционально соединен с бортовым компьютером транспортного средства.
32. Детское сиденье по п. 26, в котором контроллер выдает, по меньшей мере, одно из предупреждения или подтверждения посредством интерфейсного устройства.
33. Детское сиденье по п. 26, выбранное из группы, состоящей из: люлек для младенцев, обращенных против движения; люлек для младенцев, обращенных по ходу движения; откидных детских сидений, обращенных по ходу движения и против движения; и дополнительных подушек для детского сиденья с привязными лямками.
34. Детское сиденье по п. 26, в котором часть для размещения ребенка съемным образом соединена с основанием сиденья.
35. Детское сиденье по п. 26, в котором интерфейсное устройство содержит, по меньшей мере, одно из звукового средства и видеодисплея.
36. Детское сиденье по п. 26, в котором ремень, принимаемый посредством системы натяжения ремня, представляет собой, по меньшей мере, одно из ремня безопасности транспортного средства или ремня LATCH-системы.
37. Детское сиденье по п. 26, дополнительно содержащее:
по меньшей мере, одно из: по меньшей мере, одного датчика для определения натяжения ремня, принимаемого системой натяжения ремня, и, по меньшей мере, одного датчика для определения угла части для размещения ребенка относительно сиденья транспортного средства,
при этом упомянутые, по меньшей мере, один датчик для определения натяжения и, по меньшей мере, один датчик для определения угла функционально соединены с контроллером.
| US 2011089726 A1 | |||
| US 2010253498 A1 | |||
| US 2004174055 A1. |

