ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Нижеприведенное в общем относится к компьютерной томографии (CT) и находит конкретное применение в обнаружении и реконструкции CT-данных, а более конкретно в CT при малых дозах.
CT-сканеры испускают ионизирующее излучение, которое может вызывать повреждение живой ткани, приводя к повышению риска рака, опухолей и генетического повреждения при типичных дозах, и может вызывать ожоги на коже и/или потерю волос при больших дозах. Например, в литературе указано, что CT-исследование с эффективной дозой в десять (10) миллизиверт (мЗв) может быть ассоциировано с увеличением вероятности рака с фатальным исходом приблизительно на один (1) шанс из двух тысяч (2000).
В литературе предложены различные подходы для того, чтобы уменьшать время воздействия на пациента ионизирующего излучения (т.е. уменьшать дозу для пациента) в ходе CT-исследования. Один подход, предложенный в литературе, состоит в том, чтобы использовать технологию сверхмалых доз для CT-исследований меньше чем мЗв или доли мЗв. К сожалению, технологии при сверхмалых дозах в доли мЗв могут приводить к CT-изображениям недиагностического качества с высокими уровнями шума (т.е. низким отношением "сигнал-шум") и артефактам в виде шумов в рисунке.
Чтобы превратить такие изображения в клинически приемлемые изображения, требуется значительное уменьшение уровня шума, эквивалентное увеличению дозы порядка на одну тысячу процентов (1000%) или более. К сожалению, описанные в литературе современные алгоритмы неитеративного исключения шумов в области изображений разработаны с возможностью уменьшать уровень шума эквивалентно увеличению дозы приблизительно до двухсот процентов (200%). Таким образом, полученные в результате CT-изображения имеют более низкое качество изображений (больше шума), чем изображения, получаемые с использованием традиционной технологии сканирования с эффективной дозой в 10 мЗв. Итеративные способы требуют длительного времени реконструкции и для активного исключения шумов могут приводить к неестественным рисункам шумов в изображениях.
С учетом вышеизложенного, существует неразрешенная потребность в других технологиях при сверхмалых дозах для CT-исследований.
Аспекты настоящей заявки разрешают вышеуказанные и другие вопросы.
Согласно одному аспекту способ включает в себя исключение шумов в данных проекции из сканирования при малых дозах в области проекции, реконструкцию данных проекции с исключенными шумами, чтобы формировать данные объемных изображений, и исключение шумов в данных объемных изображений в области изображений.
Согласно другому аспекту система включает в себя процессор области проекции, который исключает шумы в данных проекции из сканирования при малых дозах, модуль реконструкции, который реконструирует данные проекции с исключенными шумами и формирует данные изображений, и процессор области изображений, который исключает шумы в данных изображений, так что уровень шума данных изображений с исключенными шумами является по существу идентичным оцененному уровню шума в данных изображений для данных изображений при сканировании при больших дозах.
Согласно другому аспекту машиночитаемый носитель хранения данных, кодированный с помощью инструкций, которые при выполнении посредством процессора компьютера предписывают процессору: использовать исключение шумов в области проекции и области изображений, чтобы формировать данные изображений из сканирования при малых дозах, которые имеют уровень шума, по существу идентичный уровню шума сканирования при больших дозах.
Изобретение может принимать форму различных компонентов и компоновок компонентов, а также различных этапов и компоновок этапов. Чертежи служат только для целей иллюстрации предпочтительных вариантов осуществления и не должны рассматриваться как ограничивающие изобретение.
Фиг. 1 иллюстрирует систему визуализации в связи с процессором области проекции и процессором области изображений.
Фиг. 2 иллюстрирует примерный процессор области проекции.
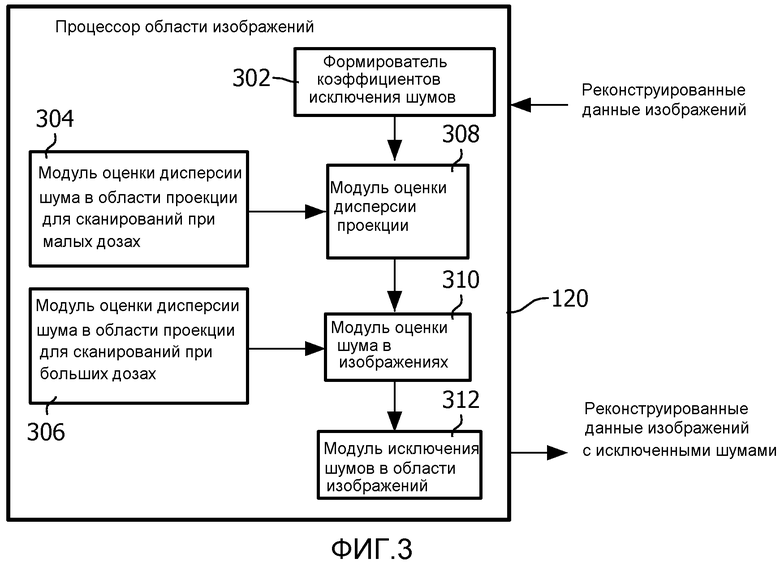
Фиг. 3 иллюстрирует примерный процессор области изображений.
Фиг. 4 иллюстрирует примерный способ.
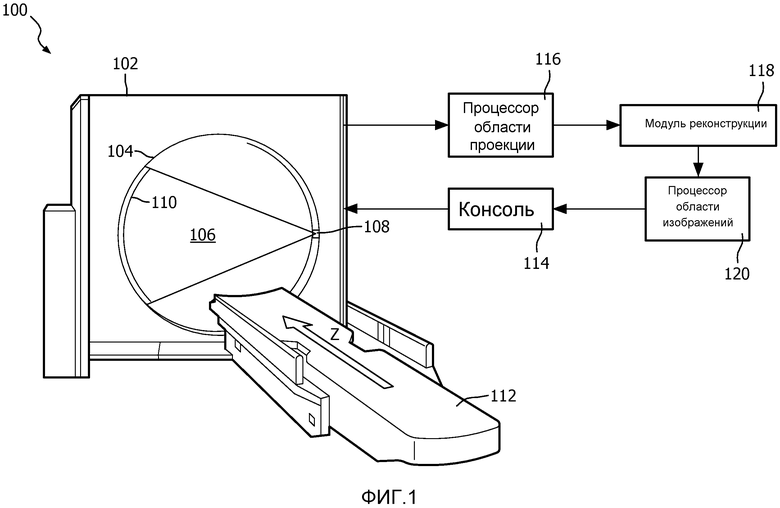
Фиг. 1 иллюстрирует систему 100 визуализации, к примеру, сканер компьютерной томографии (CT). Система 100 визуализации включает в себя стационарный гентри 102 и вращающийся гентри 104, который установлен с возможностью вращения на стационарном гентри 102. Вращающийся гентри 104 вращается вокруг исследуемой области 106 вокруг продольной оси или оси Z.
Источник 108 излучения, такой как рентгеновская трубка, поддерживается посредством вращающегося гентри 104 и вращается вместе с вращающимся гентри 104 и испускает излучение. Источник 108 излучения выполнен с возможностью осуществления сканирований при больших и малых дозах.
Чувствительная к излучению детекторная решетка 110, расположенная напротив источника 108, определяет излучение, которое проходит по исследуемой области 106, и формирует данные проекции, указывающие его. Чувствительная к излучению детекторная решетка 110 может включать в себя одну или более строк чувствительных к излучению пиксельных элементов.
Опора 112, такая как кушетка, поддерживает объект в исследуемой области 106. Опора 112 может быть использована для того, чтобы по-разному размещать объект относительно осей X, Y и/или Z до, во время и/или после сканирования.
Вычислительная система общего назначения служит в качестве операторской консоли 114, которая включает в себя воспринимаемые человеком устройства вывода, такие как дисплей и/или принтер, и устройства ввода, такие как клавиатура и/или мышь. Программное обеспечение, постоянно размещающееся в консоли 114, дает возможность оператору управлять работой системы 100, например, давая возможность оператору выбирать технологию сканирования при малых дозах (например, доли мЗв), алгоритм обработки в области проекции, алгоритм реконструкции, алгоритм обработки в области изображений и т.д.
Процессор 116 области проекции обрабатывает данные проекции, сформированные посредством чувствительной к излучению детекторной решетки 110, модуль 118 реконструкции реконструирует данные проекции, обработанные посредством процессора 116 области проекции, и формирует данные объемных изображений, указывающие исследуемую область 106, а процессор 120 области изображений обрабатывает данные объемных изображений, сформированные посредством модуля 118 реконструкции.
Как подробнее описано ниже, относительно сканирований при малых дозах надлежащая обработка в области проекции включает в себя адаптивное исключение шумов в данных проекции, а надлежащая обработка в области изображений включает в себя исключение шумов в данных изображений, так что уровень шума изображения с исключенными шумами совпадает с уровнем шума, который может быть получен посредством выполнения целевого сканирования при больших дозах вместо сканирования при малых дозах.
Такое исключение шумов в области проекции и изображений предоставляет возможность сканирований при уровнях доз в доли мЗв (сверхнизких) при формировании изображений с уровнями шума, сравнимого со сканированиями при больших дозах (например, в мЗв и выше). Такие сканирования оптимально подходят для таких процедур, как сканирования головного мозга, экранирующие сканирования для количественной оценки содержания кальция, педиатрические сканирования и/или другие сканирования. Такие сканирования также могут сокращать, уменьшать и/или заменять предварительное сканирование.
Следует принимать во внимание, что процессор 116 области проекции и/или процессор 120 области изображений может быть частью модуля 118 реконструкции. Кроме того, одно или более из процессора 116 области проекции, модуля 118 реконструкции или процессора 120 области изображений может быть исключено из системы 100, например, в такой вычислительной системе, как рабочая станция и т.п. Кроме того, один или более процессоров могут выполнять машиночитаемые инструкции, кодированные и/или осуществленные на локальном или удаленном машиночитаемом носителе хранения данных, таком как запоминающее устройство, чтобы реализовывать одно или более из процессора 116 области проекции, модуля 118 реконструкции или процессора 120 области изображений.
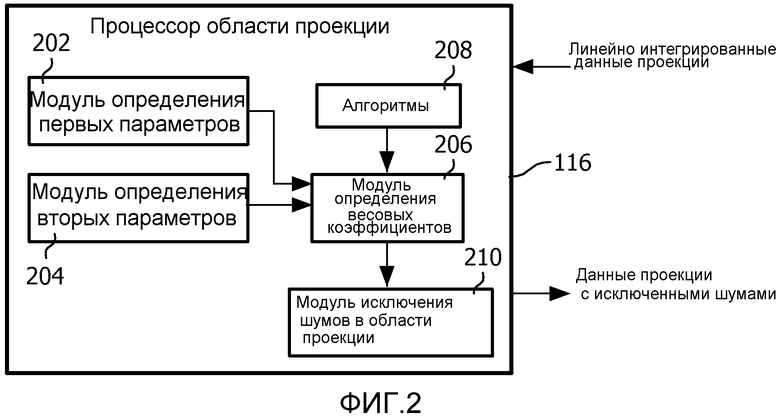
Фиг. 2 иллюстрирует примерный процессор области проекции.
Ввод процессора 116 представляет собой показания по проекции, описывающие линейные интегралы коэффициентов ослабления рентгеновского излучения через сканированного пациента. Для обнаружений, которые включают в себя динамическое фокальное пятно, процессор 116 области проекции может обрабатывать по отдельности показания каждого различного фокального пятна или, альтернативно, обрабатывать их вместе после перемежения друг с другом.
Модуль 202 определения первых параметров определяет первый параметр данных проекции. В проиллюстрированном варианте осуществления первый параметр включает в себя дисперсию шума данных проекции. Модуль 204 определения вторых параметров определяет второй параметр данных проекции. В проиллюстрированном варианте осуществления второй параметр включает в себя изменение данных проекции, которое может быть оценено согласно скалярному произведению градиентов или определяться по-иному.
Формирователь 206 весовых коэффициентов формирует весовые коэффициенты исключения шумов, по меньшей мере, на основе первого и второго параметра и одного или более алгоритмов 208. В качестве примера, если первый и второй параметры указывают, что данные проекции включают в себя более низкую локальную дисперсию шума и более высокое локальное изменение, формирователь 206 весовых коэффициентов использует алгоритм для того, чтобы формировать весовой коэффициент, который снижается быстрее с расстоянием между соседними показаниями по проекции и показанием, которое должно быть интерполировано. В другом примере, если первый и второй параметры указывают, что данные проекции включают в себя более высокую локальную дисперсию шума и более низкое локальное изменение, формирователь 206 весовых коэффициентов использует алгоритм для того, чтобы формировать весовой коэффициент, который снижается медленнее с расстоянием между соседними показаниями по проекции и показанием, которое должно быть интерполировано.
Модуль 210 исключения шумов в области проекции применяет весовые коэффициенты, чтобы исключать шумы в данных проекции. В одном случае это фактически приводит к замене каждой проекции на взвешенную сумму исходных показаний в ее трехмерном окружении. В общем, это приводит к активному исключению шумов проекций с более высокими шумами, которые не включают в себя интересующую структуру, промежуточному исключению шумов проекций с более высокими шумами, которые включают в себя интересующую структуру, и небольшому исключению шумов проекций с более низкими шумами, которые включают в себя интересующую структуру. Посредством адаптивного исключения шумов в проекции как такового может уменьшаться размытие деталей изображения для данного исключения шумов в изображениях.
В одном варианте осуществления модуль 210 исключения шумов в области проекции применяет весовые коэффициенты, как показано в уравнении 1:
уравнение 1

где  представляет интерполированное показание с исключенными шумами,
представляет интерполированное показание с исключенными шумами,  представляет зашумленные данные проекции в окружении показания i, а
представляет зашумленные данные проекции в окружении показания i, а  представляет адаптивные весовые коэффициенты. Это, по существу, заменяет каждое исходное показание по проекции взвешенной суммой исходных показаний по проекции в предварительно определенном окружении относительно исходного показания по проекции.
представляет адаптивные весовые коэффициенты. Это, по существу, заменяет каждое исходное показание по проекции взвешенной суммой исходных показаний по проекции в предварительно определенном окружении относительно исходного показания по проекции.
Адаптивные весовые коэффициенты могут быть определены на основе уравнения 2:
уравнение 2
где  представляет ненормализованные весовые коэффициенты взвешенной суммы.
представляет ненормализованные весовые коэффициенты взвешенной суммы.
В неограничивающем варианте осуществления параметр может быть определен на основе уравнения 3:
уравнение 3
где  представляет расстояние между соседом
представляет расстояние между соседом  и показанием
и показанием  , а
, а  является параметром, который определяет активность сглаживания.
является параметром, который определяет активность сглаживания.
В неограничивающем варианте осуществления параметр может быть определен на основе уравнения 4:
уравнение 4
где  задает минимальное снижение весовых коэффициентов с расстоянием,
задает минимальное снижение весовых коэффициентов с расстоянием,  представляет оцененное локальное изменение,
представляет оцененное локальное изменение,  представляет среднее значение локальных изменений, вычисленных в различных областях в области проекции,
представляет среднее значение локальных изменений, вычисленных в различных областях в области проекции,  представляет дисперсию шума,
представляет дисперсию шума,  представляет среднее значение из значений локальной дисперсии шума, вычисленных в различных областях в области проекции.
представляет среднее значение из значений локальной дисперсии шума, вычисленных в различных областях в области проекции.
Чтобы минимизировать размытие диагностических деталей, и назначаются значения, которые максимизируют изменение  между различными местоположениями в области проекции. В отличие от , параметр
между различными местоположениями в области проекции. В отличие от , параметр  является независимым от
является независимым от  и . Это дает возможность управления активностью исключения шумов и одновременного поддержания высокой зависимости весовых коэффициентов от и .
и . Это дает возможность управления активностью исключения шумов и одновременного поддержания высокой зависимости весовых коэффициентов от и .
Фиг. 3 иллюстрирует примерный процессор 120 области изображений.
Модуль 304 определения дисперсии шума в области проекции определяет дисперсию шума для данных проекции сканирования при малых дозах. Модуль 306 оценки дисперсии шума в данных проекции оценивает дисперсию шума для данных проекции, которые должны быть сформированы, если выполнено целевое сканирование при больших дозах.
Формирователь 302 коэффициентов исключения шумов формирует коэффициент исключения шумов. Проиллюстрированный формирователь 302 коэффициентов исключения шумов учитывает перекрестные помехи детектора.
Модуль 308 оценки дисперсии проекции оценивает дисперсию проекции для сканирования при малых дозах на основе дисперсии шума, оцененной посредством 304, и коэффициента исключения шумов.
Модуль 310 оценки шума в изображениях оценивает шум в изображениях для сканирования при малых дозах на основе соответствующей дисперсии проекции и шум в изображениях для сканирования при больших дозах на основе соответствующей дисперсии проекции.
Модуль 312 исключения шумов в области изображений исключает шумы в данных изображений на основе шума в изображениях для сканирования при малых дозах и шума в изображениях для большей дозы.
В одном варианте осуществления вышеуказанный коэффициент исключения шумов может быть сформирован посредством формирователя 302 коэффициентов исключения шумов, как показано в уравнении 5.
уравнение 5
где  представляет коэффициент исключения шумов.
представляет коэффициент исключения шумов.
Дисперсии проекции для сканирования при малых дозах и сканирования при больших дозах соответственно могут быть оценены посредством оцененной дисперсии показаний по проекции и коэффициентов исключения шумов через уравнения 6 и 7:
уравнение 6
 и
и
уравнение 7
где  представляет дисперсию проекции для сканирования при малых дозах,
представляет дисперсию проекции для сканирования при малых дозах,  представляет локальную дисперсию шума сканирования при малых дозах,
представляет локальную дисперсию шума сканирования при малых дозах,  представляет дисперсию проекции для сканирования при больших дозах и
представляет дисперсию проекции для сканирования при больших дозах и  представляет локальную дисперсию шума для сканирования при больших дозах.
представляет локальную дисперсию шума для сканирования при больших дозах.
Зависимые от проекции скалярные значения дисперсии могут быть сформированы для каждой проекции посредством выполнения суммирования по их поднаборам, например, для предварительно определенной группы (например, 150, 200, 300 и т.д.) центральных показаний, принадлежащих центральной строке проекции.
Для апертурно взвешенной фильтрованной обратной проекции значения дисперсии шума в центре портального вращения, полученные для данных изображений сканирования при малых дозах с исключенными шумами в проекции и для данных изображений сканирования при больших дозах, соответственно могут быть определены через уравнения 8 и 9:
уравнение 8
 и
и
уравнение 9
где  является константой для данного набора параметров реконструкции, а I обозначает различные осевые изображения.
является константой для данного набора параметров реконструкции, а I обозначает различные осевые изображения.
Исключение шумов в области изображений, применяемое посредством модуля 312 исключения шумов в области изображений, может быть определено так, как показано в уравнении 10:
уравнение 10
где  представляет исключение шумов в области изображений и передается в комплементарный алгоритм исключения шумов в области изображений.
представляет исключение шумов в области изображений и передается в комплементарный алгоритм исключения шумов в области изображений.
С использованием  в качестве ввода модуль 312 исключения шумов в области изображений исключает шумы в данных изображений, так что уровень шума каждого осевого изображения, реконструированного из проекций с исключенными шумами, совпадает с уровнем шума, который должен быть получен посредством выполнения сканирования при больших дозах вместо сканирования при сверхмалых дозах.
в качестве ввода модуль 312 исключения шумов в области изображений исключает шумы в данных изображений, так что уровень шума каждого осевого изображения, реконструированного из проекций с исключенными шумами, совпадает с уровнем шума, который должен быть получен посредством выполнения сканирования при больших дозах вместо сканирования при сверхмалых дозах.
Фиг. 4 иллюстрирует способ для формирования изображений с уровнями шума сканирований при больших дозах из сканирований при малых дозах.
На 402 сканирование при малых дозах (например, 10 мКл) выполняется для объекта. Как описано в данном документе, такое сканирование может соответствовать сканированию с эффективной дозой в доли мЗв.
На 403 линейные интегралы коэффициентов ослабления рентгеновского излучения вычисляются в области проекции.
На 404 данные проекции линейных интегралов подвергаются исключению шумов. Как описано в данном документе, надлежащее исключение шумов в области проекции включает в себя адаптивное исключение шумов в данных проекции таким образом, что данные проекции, имеющие более низкую локальную дисперсию шума и более высокое локальное изменение, подвергаются исключению шумов в меньшей степени, чем подвергаются исключению шумов данные проекции, имеющие более высокую локальную дисперсию шума и более низкое локальное изменение.
На 406 данные проекции с исключенными шумами реконструируются, чтобы формировать данные изображений.
На 408 данные изображений подвергаются исключению шумов. Как описано в данном документе, надлежащее исключение шумов в области изображений включает в себя исключение шумов в данных таким образом, что уровень шума данных изображений с исключенными шумами по существу является аналогичным уровню шума целевого сканирования при больших дозах (например, 100 мКл).
Вышеописанные этапы могут быть реализованы посредством машиночитаемых инструкций, которые при выполнении посредством процессора(ов) компьютера предписывают процессору осуществлять действия, описанные в данном документе. В таком случае инструкции сохраняются на машиночитаемом носителе хранения данных, таком как запоминающее устройство, ассоциированное и/или иным образом доступное для релевантного компьютера.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. Очевидно, что после прочтения и понимания вышеозначенного подробного описания могут выполняться модификации и изменения. Изобретение должно трактоваться как включающее в себя все подобные модификации и изменения в той мере, в какой они попадают в пределы объема прилагаемой формулы изобретения или ее эквивалентов.
Изобретение относится к компьютерной томографии. Техническим результатом является повышение качества объемных изображений. Способ содержит этапы, на которых: исключают шумы в данных проекции из сканирования при малых дозах в области проекции, при этом сканирование при малых дозах соответствует сканированию, которое формирует данные изображений с уровнем шума, который выше предварительно определенного целевого уровня шума в данных изображений; реконструируют данные проекции с исключенными шумами, чтобы формировать данные объемных изображений; определяют уровень шума данных изображений; оценивают уровень шума для данных изображений сканирования при больших дозах; определяют отношение уровня шума сканирования при больших дозах к уровню шума изображения сканирования при малых дозах и исключают шумы в данных объемных изображений в области изображений на основе отношения. 2 н. и 9 з.п. ф-лы, 4 ил. 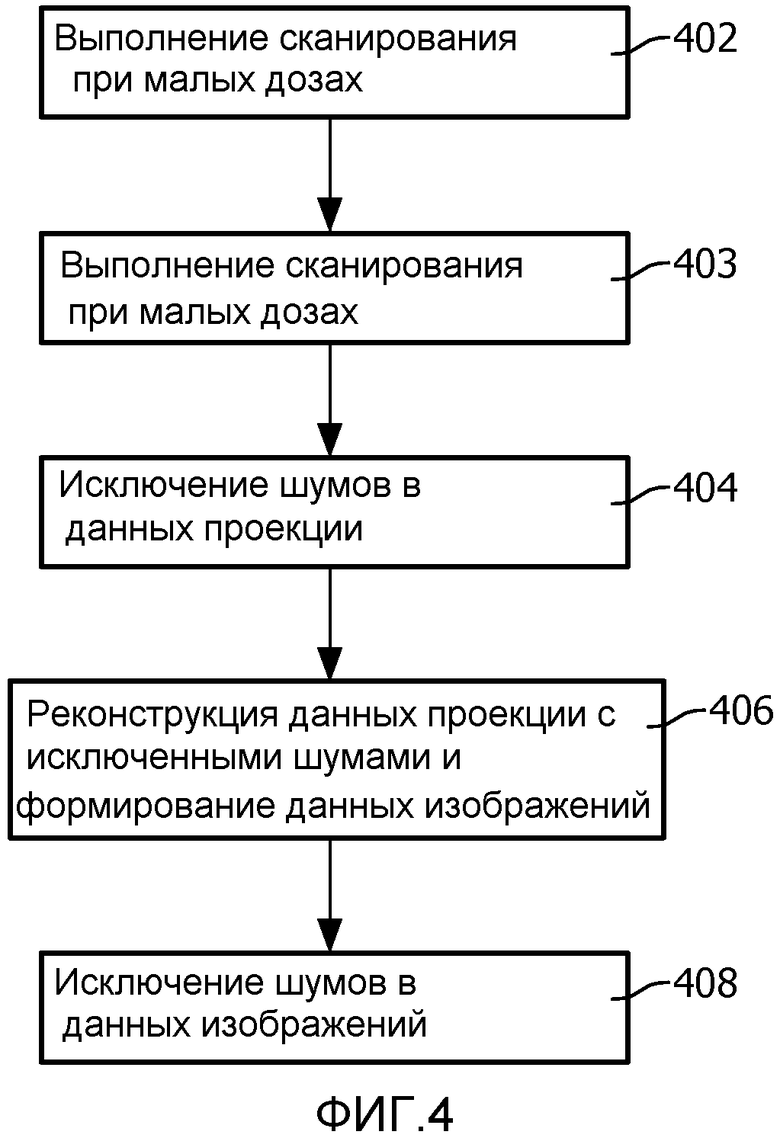
1. Способ реконструкции данных изображения компьютерной томографии, содержащий этапы, на которых:
исключают шумы в данных проекции из сканирования при малых дозах в области проекции, при этом сканирование при малых дозах соответствует сканированию, которое формирует данные изображений с уровнем шума, который выше предварительно определенного целевого уровня шума в данных изображений;
реконструируют данные проекции с исключенными шумами, чтобы формировать данные объемных изображений;
определяют уровень шума данных изображений;
оценивают уровень шума для данных изображений сканирования при больших дозах;
определяют отношение уровня шума сканирования при больших дозах к уровню шума изображения сканирования при малых дозах и
исключают шумы в данных объемных изображений в области изображений на основе отношения.
2. Способ по п. 1, в котором данные изображений с исключенными шумами имеют уровень шума, по существу, идентичный предварительно определенному целевому уровню шума в данных изображений.
3. Способ по любому из пп. 1-2, в котором сканирование при малых дозах имеет эффективную дозу в доли мЗв, а сканирование при больших дозах имеет эффективную дозу в десять мЗв или выше.
4. Способ по любому из пп. 1-2, дополнительно содержащий этап, на котором:
- адаптивно исключают шумы в данных проекции на основе локальной дисперсии шума и локального изменения.
5. Способ по п. 4, в котором данные проекции, имеющие более низкую локальную дисперсию шума и более высокое локальное изменение, подвергаются исключению шумов в меньшей степени, чем подвергаются исключению шумов данные проекции, имеющие более высокую локальную дисперсию шума и более низкое локальное изменение.
6. Способ по любому из пп. 1-2, в котором исключение шумов в области проекции является неитеративным исключением шумов.
7. Способ по любому из пп. 1-2, в котором исключение шумов в области проекции уменьшает размытие деталей изображения.
8. Система реконструкции данных изображения компьютерной томографии, содержащая:
процессор (116) области проекции, который исключает шумы в данных проекции из сканирования при малых дозах;
модуль (118) реконструкции, который реконструирует данные проекции с исключенными шумами и формирует данные изображений; и
процессор (120) области изображений, который исключает шумы в данных изображений таким образом, что уровень шума данных изображений с исключенными шумами является по существу идентичным оцененному уровню шума в данных изображений для данных изображений при сканировании при больших дозах, причем процессор (120) области изображений выполнен с возможностью определять уровень шума данных изображений; оценивать уровень шума для данных изображений сканирования при больших дозах; определять отношение уровня шума сканирования при больших дозах к уровню шума изображения сканирования при малых дозах и исключать шумы в данных объемных изображений в области изображений на основе отношения.
9. Система по п. 8, дополнительно содержащая:
- формирователь (302) коэффициентов исключения шумов, который определяет снижение дисперсии шума данных проекции для сканирования при малых дозах вследствие исключения шумов;
- модуль (304) оценки дисперсии шума в области проекции для сканирований при малых дозах, который оценивает дисперсию шума данных проекции для сканирования при малых дозах перед исключением шумов;
- модуль (308) оценки дисперсии проекции, который оценивает дисперсию проекции для сканирования при малых дозах на основе дисперсии шума, определенной посредством модуля оценки дисперсии шума, и коэффициента исключения шумов, определенного посредством модуля определения коэффициентов исключения шумов;
- модуль (306) оценки дисперсии шума проекции в области проекции для сканирований при больших дозах, который оценивает дисперсию проекции для сканирования при больших дозах;
- модуль (310) оценки шума в изображениях, который оценивает дисперсию шума в изображениях для сканирования при малых дозах с исключенными шумами в проекции и для сканирования при больших дозах; и
модуль (312) исключения шумов в области изображений исключает шумы в данных изображений на основе дисперсии шума в изображениях для сканирований при меньших и больших дозах.
10. Система по п. 8, в которой коэффициент исключения шумов учитывает перекрестные помехи детектора.
11. Система по любому из пп. 8-9, в которой коэффициент исключения шумов сформирован для поднабора проекций.
| US20030076988 A1, 24.04.2003 | |||
| US20080232665 A1, 25.09.2008 | |||
| WO03062802 A2, 31.07.2003 | |||
| РЕНТГЕНОСКОПИЯ С ИСПОЛЬЗОВАНИЕМ КK-ИЗЛУЧЕНИЯ ГАДОЛИНИЯ | 2001 |
|
RU2210316C2 |
| СПОСОБ ДИАГНОСТИКИ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ, ЗВУКОВЫХ И ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 2007 |
|
RU2378989C2 |

