По настоящей заявке испрашивается приоритет согласно патентной заявке Китая №201110439199.4, поданной 23 декабря 2011 г., озаглавленной "Method and device for patrol inspection and locating a radioactive substance" ("Способ и устройство для патрульной инспекции и локализации радиоактивного вещества"), раскрытие которой включено в настоящий документ посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
1. ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в общем относится к способу для патрульной инспекции и локализации радиоактивного вещества и устройству для осуществления способа.
2. ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
В таких областях применения, как защита или безопасность окружающей среды, когда отслеживается и контролируется радиоактивное вещество, обычно требуется измерять радиоактивное распределение внутри некоторой области или искать потерянный источник радиоактивности. Подвижный патрульный спектрометр является устройством для обнаружения радиоактивного вещества с системой позиционирования на нем, которое может быть установлено на автомобильном транспортном средстве, вертолете, судне или других носителях. Система позиционирования может получать текущие географические позиции и гамма-спектрометрию или скорость счета нейтронов радиоактивного вещества в реальном времени. Подвижный патрульный спектрометр содержит систему позиционирования GPS помимо компонентов, обычно содержащихся в стандартном спектрометре, например детектор, источник питания, предварительный усилитель, электронный модуль, MCA (многоканальный анализатор) и блок обработки данных. Дополнительно, подвижный патрульный спектрометр фокусируется на получении, сохранении, считывании и анализе многочисленных пробных данных с высокой эффективностью. Посредством стандартного подвижного спектрометра может быть измерен радиоактивный уровень на маршруте движения, но радиоактивное распределение в локальной области, в которой находится маршрут, может не быть получено. Например, когда установленный на транспортном средстве патрульный спектрометр осуществляет инспекцию вдоль дороги, он может только выделять радиоактивные уровни в соответственных точках на дороге, но он не может получить конкретные условия радиоактивного распределения внутри некоторого конкретного диапазона с обеих сторон от дороги. Если он используется для поиска потерянного источника радиоактивности, то невозможно определить конкретную позицию источника радиоактивности.
Некоторые специализированные устройства для определения позиции источника радиоактивности также предлагаются. Один их класс осуществляет локализацию путем получения изображения, например посредством гамма-камеры. Другой их класс имеет коллиматоры и блоки вращения. Посредством коллиматоров направление, в котором находится источник радиоактивности, может быть определено, и позиция источника радиоактивности может быть определена путем измерений для ряда позиций. Однако, поскольку все эти устройства должны измерять фиксированные точки в течение долгого времени и имеют низкую эффективность обнаружения, они не подходят для патрульной инспекции. Они могут быть использованы только для осуществления дополнительных измерений после того, как патрульный спектрометр определил подозрительные области.
Ввиду этого действительно существует необходимость в обеспечении устройства патрульной инспекции и способа патрульной инспекции для быстрого и эффективного измерения распределения радиоактивной интенсивности в области обнаружения вокруг маршрута патрульной инспекции и определения позиций радиоактивных веществ.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения состоит в обеспечении устройства патрульной инспекции и способа патрульной инспекции, которые могут определять позицию и распределение радиоактивной интенсивности радиоактивных веществ в инспектируемой области на основе многоточечного наблюдения детекторами на маршруте патрульной инспекции.
Для этих целей настоящее изобретение может осуществляться следующим образом.
В соответствии с одним аспектом настоящего изобретения оно обеспечивает способ для патрульной инспекции и локализации радиоактивного вещества, содержащий этапы, содержащие:
(a) обеспечение значения фоновой радиоактивной интенсивности среды;
(b) сбора значений радиоактивной интенсивности от инспектируемой области посредством детектора в ряде точек пробоотбора на маршруте патрульной инспекции;
(c) вычисления распределения радиоактивной интенсивности в инспектируемой области на основе собранных значений радиоактивной интенсивности и значения фоновой радиоактивной интенсивности; и
(d) определения позиции радиоактивного вещества на основе распределения радиоактивной интенсивности.
Предпочтительно способ дополнительно может содержать этап (b1) между этапом (b) и этапом (c), т.е. этап:
определения, больше ли различия между собранными значениями радиоактивной интенсивности и значениями фоновой радиоактивной интенсивности, чем порог сбора, и выполнения этапа (c), если они больше, чем порог сбора; в противном случае, если они не больше, чем порог сбора, обновления значений фоновой радиоактивной интенсивности посредством средневзвешенного значения собранных значений радиоактивной интенсивности и значений фоновой радиоактивной интенсивности и возвращения к этапу (b), чтобы повторно собрать значения радиоактивной интенсивности.
Предпочтительно способ может дополнительно содержать этап (b2) между этапом (b) и этапом (c), т.е. этап:
определения, есть ли сегмент данных, в котором значения радиоактивной интенсивности резко падают и затем резко возрастают, в последовательности значений радиоактивной интенсивности, собранных в многочисленных непрерывных точках пробоотбора, и удаления сегмента данных для устранения эффектов препятствий, если он присутствует.
Предпочтительно детектор может содержать по меньшей мере два детектора, обращенных к инспектируемым областям в различных направлениях, соответственно, причем детекторы разделены деталью экранирования друг от друга.
Кроме того, значения радиоактивной интенсивности могут быть представлены скоростью счета или мощностью дозы.
Кроме того, этап (c) может содержать этап (c1), т.е. этап:
разделения инспектируемой области на ряд подобластей, обеспечения эффективностей обнаружения детектора для подобластей и определения радиоактивной интенсивности каждой подобласти на основе фоновой радиоактивной интенсивности и эффективностей обнаружения.
Кроме того, количество подобластей может не превосходить количество точек пробоотбора.
Кроме того, эффективности обнаружения могут калиброваться для некоторого конкретного диапазона энергии и/или вида радиоактивного вещества.
Кроме того, этап (c) дополнительно может содержать этап (c2), т.е. этап:
Черчения карты распределения радиоактивной интенсивности в инспектируемой области на основе радиоактивной интенсивности в каждой подобласти.
Кроме того, разделение подобластей может осуществляться в одном измерении, двух измерениях или трех измерениях.
Кроме того, детектор может быть обеспечен на подвижном носителе, причем собранное значение радиоактивной интенсивности равно
 ,
,
где m - индекс подобластей, m=1, …, M, M - полное количество подобластей, bt - значение фоновой радиоактивной интенсивности, pm - позиция m-й подобласти, am - значение радиоактивной интенсивности m-й подобласти, qt - позиция подвижного носителя, θt - угол направления подвижного носителя, Ф(pm, qt, θt) - эффективность обнаружения детектора для позиции pm, если подвижный носитель находится в позиции qt с углом направления θt, t - индексы собранных значений радиоактивной интенсивности, t=1, …, N, N - полное количество собранных значений радиоактивной интенсивности, εt - ошибка сбора.
В дополнительном варианте осуществления этап (c1) может выполняться путем разреженного разложения вектора C на векторном множестве D, где вектор C=(c1-b1, …, cN-bN)T, векторное множество D={Dm}, Dm=(Ф(pm, q1, θ1), …, Ф(pm, qN, θN))T.
В дополнительном варианте осуществления этап определения радиоактивной интенсивности каждой подобласти может дополнительно содержать этапы:
(c11) выявления множества S индексов и вектора невязки R и установления исходного значения S0 множества S как пустого множества, исходного значения R0 вектора невязки R как вектора C и исходного значения am как ноль;
(c12) определения проекции R0 на вектор Dm в векторном множестве D как Pm, определения значения m, соответствующего максимуму Pm, как n, затем добавления n к S0 для обновления множества S и обновления вектора невязки R так, чтобы обновленный вектор невязки R был разностью между вектором C и проекцией вектора C на вектор Dn;
(c13) определения, меньше ли норма обновленного вектора невязки R, чем порог невязки, и, если норма меньше, чем порог невязки, am будет вычисляться как коэффициент проекции вектора C на вектор Dm, где, только если m попадает в обновленное множество S, результат вычисления am ненулевой, в то время как, если m не попадает в обновленное множество S, результат вычисления am равен нулю; в противном случае, если норма обновленного вектора невязки R меньше, чем порог невязки, R0 и S0 будут замещены обновленным вектором невязки R и обновленным множеством S соответственно для повторного выполнения этапа (c12), чтобы многократно обновлять вектор невязки R и множество S, пока норма обновленного вектора невязки R не станет меньше, чем порог невязки, или количество циклов многократного выполнения этапа (c12) не удовлетворит предварительно определенному значению.
В дополнительном варианте осуществления этап (d) может содержать этап:
(d1) определения подобласти, в которой результат вычисления am ненулевой, в качестве активной подобласти и определения подобласти, в которой находится радиоактивное вещество, на основе распределения активной подобласти и результата вычисления am.
В дополнительном варианте осуществления этап (d1) может содержать этап:
численного вычисления позиции активной подобласти, когда функция ошибки принимает минимальное значение, причем функция ошибки имеет вид
 ,
,
где l=x1, …, xL, L - полное количество активной подобласти, x1, …, xL - индексы подобласти, которая является активной подобластью, и pt будет более точной позицией, когда функция ошибки H принимает минимальное значение.
В соответствии с другим аспектом настоящего изобретения оно также обеспечивает устройство для патрульной инспекции и локализации радиоактивного вещества и для осуществления способа согласно любому из вышеупомянутых вариантов осуществления, причем устройство содержит:
два или более детектора, выполненных с возможностью сбора значений радиоактивной интенсивности с инспектируемой области вокруг маршрута патрульной инспекции в каждой из ряда точек пробоотбора на маршруте патрульной инспекции; и
подвижный носитель, выполненный с возможностью переноса детектора и перемещения по маршруту патрульной инспекции для прохождения мимо точек,
причем детекторы обращены в различных направлениях вокруг точек пробоотбора, соответственно, и разделены деталью экранирования друг от друга.
По меньшей мере один аспект из вышеприведенных технических решений настоящего раскрытия может оценивать позицию и распределение радиоактивного вещества путем многоточечного наблюдения на маршруте патрульной инспекции на основе различия эффективности обнаружения детектора в различных направлениях и расстояниях. Они обеспечивают быстрый и эффективный подход, в частности, для динамической патрульной инспекции радиоактивного вещества.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 схематически изображает блок-схему способа для патрульной инспекции и локализации радиоактивного вещества согласно одному варианту осуществления настоящего изобретения;
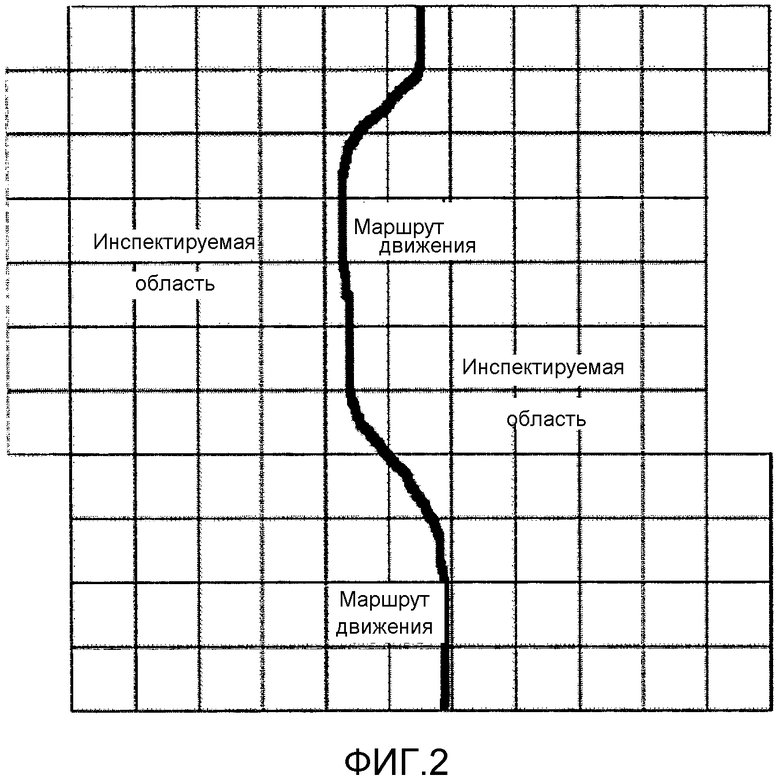
Фиг. 2 изображает схематичный вид маршрута патрульной инспекции и инспектируемой области устройства для патрульной инспекции и локализации радиоактивного вещества согласно одному варианту осуществления настоящего изобретения;
Фиг. 3 изображает схематичный вид распределения радиоактивной интенсивности, собранной по способу настоящего раскрытия для патрульной инспекции и локализации радиоактивного вещества;
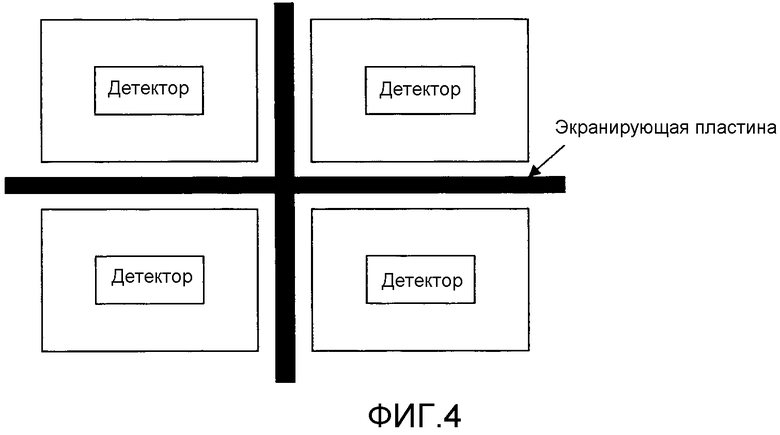
Фиг. 4 изображает схематичный вид устройства для патрульной инспекции и локализации радиоактивного вещества с четырьмя детекторами согласно одному варианту осуществления настоящего изобретения; и
Фиг. 5 изображает схематичный вид устройства для патрульной инспекции и локализации радиоактивного вещества с двумя детекторами согласно одному варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Далее технические решения настоящего изобретения будут описаны более подробно в виде варианта осуществления со ссылками на чертежи, причем аналогичные или подобные ссылочные позиции ссылаются на аналогичные или подобные элементы на протяжении технического описания. Объяснение для варианта осуществления настоящего изобретения со ссылками на сопроводительные чертежи предназначено для интерпретации общей идеи изобретения настоящего изобретения и не должно толковаться как ограничение настоящего изобретения.
Фиг. 1 схематически изображает способ для патрульной инспекции и локализации радиоактивного вещества согласно одному варианту осуществления настоящего изобретения. Способ содержит: этап 101 обеспечения значения фоновой радиоактивной интенсивности среды, этап 102 сбора значений радиоактивной интенсивности с инспектируемой области посредством детектора в ряде точек пробоотбора на маршруте патрульной инспекции, этап 105 вычисления распределения радиоактивной интенсивности в инспектируемой области на основе собранных значений радиоактивной интенсивности, и этап 106 определения позиции радиоактивного вещества на основе распределения радиоактивной интенсивности. Этапы, указанные пунктирными линиями на фиг. 1, являются необязательными.
На практике, даже если никаких радиоактивных веществ не присутствует в среде, детектор будет показывать некоторое значение сигнала обнаружения, т.е. фоновое значение. Перед обнаружением необходимо сначала обеспечить значение фоновой радиоактивной интенсивности. Есть различие между пробоотборами без и с радиоактивным веществом, а именно без радиоактивного вещества фоновое значение существенно не варьируется, если оно измеряется в различных направлениях; в отличие от этого, с радиоактивным веществом измерения для радиоактивного вещества существенно варьируются в различных направлениях, если детектор имеет различные эффективности обнаружения в направлениях, поскольку распределение радиоактивного вещества обычно неравномерно. На основе такой характеристики возможно определить, действительно или нет исходное собранное фоновое значение. Другой подход предназначен для сбора нескольких фоновых значений в различных позициях. Если различия между этими фоновыми значениями относительно малы, это означает, что вероятность того, что радиоактивное вещество присутствует, мала, и, таким образом, собранные фоновые значения могут быть использованы в качестве исходного фонового значения. Также может быть определено посредством практического опыта и данных измерения в прошлом, действительно или нет исходное фоновое значение.
В одном варианте осуществления настоящего изобретения множество точек пробы может быть обеспечено на маршруте патрульной инспекции. После того как обеспечиваются значения фоновой радиоактивной интенсивности среды, значения радиоактивной интенсивности из инспектируемой области собираются посредством детектора в ряде точек пробоотбора. В течение патрульной инспекции сбор может выполняться последовательно с некоторым интервалом.
Распределение радиоактивной интенсивности инспектируемой области вычисляется на основе собранных значений радиоактивной интенсивности и значения фоновой радиоактивной интенсивности. На этапе 105 инспектируемая область может разделяться на множество подобластей, обеспечиваются эффективности обнаружения детектора для соответственных точек пробоотбора данных подобластей, и радиоактивная интенсивность каждой подобласти может быть определена на основе фоновой радиоактивной интенсивности и эффективностей обнаружения. Разделение подобластей может осуществляться в одном измерении, двух измерениях или трех измерениях. То есть каждая подобласть может быть создана как сегмент линии в одном измерении, плоская область в двух измерениях или пространственное тело в трех измерениях. Фиг. 2 изображает пример, в котором инспектируемая область в двухмерной плоскости разделяется на соответственные подобласти квадратной формы. Как видно на фиг. 2, инспектируемая область покрывает большую зону на маршруте патрульной инспекции (т.е. маршруте движения подвижного носителя для детектора) и с обеих сторон от него.
Эффективность обнаружения является отношением количества обнаруженных радиационных частиц к количеству частиц, излучаемых от радиационного источника. Эффективность обнаружения является собственным свойством устройства для патрульной инспекции радиоактивного вещества, однако она зависит от угла измерения, от расстояния, даже от диапазона энергии радиоактивного вещества и типа источника радиоактивности. Таким образом, перед тем как распределение радиоактивной интенсивности радиоактивного вещества обнаруживается или вычисляется, необходимо откалибровать или вычислить эффективность обнаружения, например, оно может получить эффективность обнаружения путем практического измерения, моделируемого вычисления или их комбинации.
Количество подобластей ассоциировано с разрешением инспектируемой области и ограничено частотой пробоотбора детектора и скоростью перемещения подвижного носителя для детектора. Например, количество подобластей может быть определено так, чтобы оно было не больше количества точек пробоотбора.
Предполагается, что всего есть M подобластей и индекс подобластей указывается как m, m=1, …, M. Значение радиоактивной интенсивности m-й подобласти указывается как am, позиция m-й подобласти указывается как pm. Значение радиоактивной интенсивности, собранное посредством детектора, в действительности является взвешенной суммой радиоактивных интенсивностей соответственных подобластей. Предполагается, что детектор всего собирает N значений радиоактивной интенсивности, и индексы собранных значений радиоактивной интенсивности указываются как t, t=1, …, N, и значение фоновой радиоактивной интенсивности указывается как bt. Предполагается, что детектор установлен на подвижном носителе, причем позиция, в которой находится подвижный носитель, указывается как qt, угол направления подвижного носителя указывается как θt. Ф(pm, qt, θt) и определяется как эффективность обнаружения детектора для позиции pm, когда подвижный носитель находится в позиции qt с углом направления θt. Тогда собранное значение радиоактивной интенсивности может быть записано как
 ,
,
где εt - ошибка сбора. Как описано выше, эффективность обнаружения Ф(pm, qt, θt) в уравнении (1) может быть получена путем, например, калибровки заранее или интерполяционного вычисления, таким образом, она известна при вычислении.
Можно увидеть из уравнения (1), что вычисление радиоактивной интенсивности каждой подобласти необходимо для нахождения решения для значения am для соответственных подобластей. В случае если детектор работает нормально, ошибка сбора εt относительно мала. Таким образом, вычисление am в действительности становится задачей решения набора линейных уравнений. Однако решения для am обычно не уникальны, если не добавляется никаких дополнительных ограничений. С учетом действительных условий патрульной инспекции радиоактивного вещества, количество источников радиоактивного вещества обычно не очень велико, и их позиции относительно сосредоточены относительно этого. Таким образом, ограничение "количество подобластей, которые содержат радиоактивное вещество, минимально" добавляется после решения уравнения (1). Фразой "подобласти, которые содержат радиоактивное вещество" обозначаются те, в которых значение am выше нуля или некоторого порога. Такие подобласти могут называться активными подобластями. Таким образом, задача сводится к нахождению решений для am с максимальным количеством нулей в решении набора уравнений, представленных уравнением (1). В случае если количество точек измерения ограничено, такое предположение полезно для нахождения нескольких подобластей с наивысшей радиоактивной интенсивностью.
Существует множество подходов для решения уравнения (1) на основе вышеупомянутых ограничений. Однако с учетом того, что способ и устройство для патрульной инспекции и локализации радиоактивного вещества в соответствии с настоящим изобретением часто должны осуществлять обработку в реальном времени, предпочтительно осуществлять вычисление способом с относительно низкой сложности. Например, уравнение (1) может быть решено путем разреженного разложения вектора. Если вектор C=(c1-b1, …, cN-bN)T, векторное множество D={Dm}, Dm=(Ф(pm, q1, θ1), …, Ф(pm, qN, θN))T, решение для am может быть найдено путем разреженного разложения вектора C на векторном множестве D.
В сущности, существует также множество подходов для разреженного разложения вектора, например способ поиска подгонки. В следующих вариантах осуществления обеспечен только пример, и варианты осуществления настоящего изобретения не будут ограничиваться этим.
В варианте осуществления сначала определяются множество S индексов и вектор невязки R, и исходное значение S0 множества S индексов устанавливается как пустое множество. Исходное значение R0 вектора невязки R устанавливается как вектор C, и исходное значение am устанавливается как ноль.
Затем проекция R0 на вектор Dm в векторном множестве D определяется как Pm, значение m, соответствующее максимуму Pm, определяется как n, затем n добавляется к S0 для обновления множества S, и вектор невязки R обновляется так, чтобы обновленный вектор невязки R был разностью между вектором C и проекцией вектора C на вектор Dn. После такого этапа количество элементов в множестве S увеличивается с нуля до 1.
Далее, возможно определить, меньше ли норма обновленного вектора невязки R, чем порог невязки, и если норма меньше, чем порог невязки, am будет вычисляться как коэффициент проекции вектора C на вектор Dm. В этом случае, только если m попадает в обновленное множество S, результат вычисления am ненулевой; в то время как если m выпадает из обновленного множества S, результат вычисления am равен нулю. В противном случае, если норма обновленного вектора невязки R не меньше, чем порог невязки, R0 и S0 будут заменены обновленным вектором невязки R и обновленным множеством S, соответственно, для повторного выполнения предыдущего этапа, для того чтобы многократно обновить вектор невязки R и множество S, пока норма обновленного вектора невязки R не будет меньше, чем порог невязки. Порог невязки может быть назначен такой, какой требуется. Чем больше порог невязки, тем меньше количество циклов выполнения операции и тем меньше количество ненулевых значений в решении для am. В отличие от этого, чем меньше порог невязки, тем больше количество циклов выполнения операции и тем больше количество ненулевых значений в решении для am. Однако решение может становиться неустойчивым, если порог невязки слишком мал. Оно может давать предварительно определенное значение количества циклов, и вычисление будет окончено, если циклическое количество выполнения циклической операции обновления вектора невязки R и множества S многократно удовлетворит предварительно определенному значению.
Хотя в вышеприведенных вычислениях предполагается, что полученное в результате множество S содержит L элементов, указанных как x1, …, xL, это означает, что значение am в множестве {am} будет ненулевым, только если m=x1, …, xL. Для этих целей подобласть, в которой значение am ненулевое, может быть определена как активная подобласть. Разумеется, этим может также быть обеспечен порог больше нуля для значения am, и только та подобласть, в которой значение am больше, чем порог, определяется как активная подобласть. В вышеописанном этапе 106 подобласть, в которой находится радиоактивное вещество, может быть определена путем черчения карты распределения радиоактивной интенсивности в инспектируемой области на основе вычисленного значения радиоактивной интенсивности am в каждой подобласти.
На этапе 106, после того как значение радиоактивной интенсивности am в подобласти получено путем разреженного разложения вектора, точная позиция, в которой находится радиоактивное вещество, может дополнительно быть вычислено, в частности, это истинно, когда количество активных подобластей мало, и радиоактивное вещество, обнаруженное патрульной инспекцией, является точечным источником радиоактивности. Вычисление может осуществляться численно. Функция ошибки записывается как
 ,
,
где L - полное количество активных подобластей, x1, …, xL - индексы всех подобластей, которые являются активными подобластями, t=1, …, N - индекс собранного значения радиоактивной интенсивности, и pt, находимое численно, когда функция ошибки H удовлетворяет своему минимальному значению, будет более точной позицией радиоактивного вещества. Следует заметить, что при решении уравнения (2) не только pt является неизвестной величиной, но также и значение радиоактивной интенсивности at активной подобласти расценивается как неизвестное качество, которое должно быть обработано. Таким образом, уравнение

больше не является линейным уравнением.
При решении уравнения путем разреженного разложения вектора, вектора в векторном множестве D={Dm} оказывают относительно большое воздействие на решение уравнения (1). Чем больше различие между Dm, т.е. чем меньше их корреляция, тем меньше плохая обусловленность набора уравнений, указанного уравнением (1), и тем меньше ошибка полученного результата и лучше устойчивость. С учетом Dm=(Ф(pm, q1, θ1), …, Ф(pm, qN, θN))T, что представляет эффективность обнаружения детектора для одной и той же подобласти (одной и той же позиции) в каждой точке пробоотбора. Таким образом, чем больше разность эффективностей обнаружения детектора в соответственных направлениях, тем меньше корреляция между Dm и тем меньше плохая обусловленность множества уравнений, указанного уравнением (1).
Для того чтобы увеличить разность эффективностей обнаружения детектора в соответственных направлениях без существенного уменьшения общей эффективности обнаружения, ряд детекторов может быть установлен с экранирующими материалами между детекторами, как показано на фиг. 4-5. Например, детектор может включать в себя два, три, четыре или более детектора, обращенных в различных направлениях вокруг точки пробоотбора. В вариантах осуществления настоящего изобретения детектором может быть детектор на основе кристалла натрий-йод (NaI), детектор нейтронов или другие детекторы.
В некоторых вариантах осуществления оно может иметь необходимость найти местоположение различных диапазонов энергии или некоторого конкретного радиоактивного вещества, представляющего интерес, и эффективности обнаружения детектора для различных энергий или радиоактивных веществ различны. В таком случае эффективности обнаружения могут калиброваться для некоторого диапазона энергии и/или вида радиоактивных веществ. Так можно оценить более точно распределение радиоактивных веществ с различными энергиями или некоторого конкретного радиоактивного вещества, представляющего интерес, в инспектируемой области или позиции источника радиоактивности.
Как показано на фиг. 1, способ может дополнительно содержать два необязательных этапа 103, 104 между этапом 102 и этапом 105. На этапе 103 определяется, больше ли разности между собранными значениями радиоактивной интенсивности и значениями фоновой радиоактивной интенсивности, чем порог сбора, и если они больше, чем порог сбора, это указывает, что выявленное радиоактивное вещество присутствует в инспектируемой области, и его позиция и распределение интенсивности должны быть вычислены, и, таким образом, этап 105 или 104 будут осуществляться далее. В противном случае, если они не больше, чем порог сбора, это указывает, что нет выявленных радиоактивных веществ в инспектируемой области, и процесс переходит к этапу 107. На этапе 107 значение фоновой радиоактивной интенсивности обновляется посредством средневзвешенного значения собранных значений радиоактивной интенсивности и значения фоновой радиоактивной интенсивности. Фоновая радиоактивная интенсивность, обеспеченная изначально на этапе 101, замещается обновленным значением фоновой радиоактивной интенсивности, и процесс возвращает к этапу 102 для повторного сбора значений радиоактивной интенсивности. Специалист в данной области техники может установить подходящий порог проб в зависимости от таких факторов, как тип, интенсивность или энергия радиации, для удовлетворения требования практической патрульной инспекции. Путем непрерывного обновления значения фоновой радиоактивной интенсивности более точное значение фоновой радиоактивной интенсивности около каждой точки пробоотбора может быть получено так, чтобы предотвратить ошибки обнаружения, вызываемые разницей фоновой радиоактивности среды между различными точками пробоотбора.
В некоторых вариантах осуществления среда вокруг точек пробоотбора может быть сложной, например, присутствуют препятствия, такие как здания, склоны, которые способны существенно ослабить радиоактивную интенсивность. В таких условиях, для того чтобы устранить ошибки обнаружения, вызываемые экранированием ввиду препятствий, обнаруженные данные могут предварительно обрабатываться для удаления этих данных, подвергшихся воздействию экранирования ввиду препятствий. Таким образом, необязательный этап 104 может быть обеспечен между этапом 102 и этапом 105. Если устройство патрульной инспекции проходит мимо области, экранированной препятствиями, собранное значение радиоактивной интенсивности может резко падать, когда оно входит в экранированную область, в то время как собранное значение радиоактивной интенсивности может резко возрастать, когда оно покидает экранированную область. Фиг. 3 изображает график радиоактивной интенсивности, собранной детектором в случае, когда присутствует экранирование ввиду препятствий. В этом примере радиоактивная интенсивность указывается скоростью счета. На фиг. 3 области 2 и 4 экранированы препятствиями, каждая из которых демонстрирует тот признак, что их радиоактивные интенсивности резко падают и затем резко возрастают по сравнению с их смежными областями. Таким образом, на этапе 104 проверяется, присутствует ли сегмент данных, в котором значения радиоактивной интенсивности резко падают и затем резко возрастают, в последовательности значений радиоактивной интенсивности, собранных в многочисленных непрерывных точек пробоотбора, и, таким образом, определяется, экранирован ли детектор препятствиями. Если такой сегмент данных присутствует, он будет удален для устранения эффектов препятствий.
Два вышеописанных необязательных этапа 103 и 104, представленных пунктирными линиями на фиг. 1, оба могут присутствовать в одном варианте осуществления, и в качестве альтернативы только один из них возможен. Порядок таких двух опциональных этапов также может быть изменен на противоположный.
В некоторых вариантах осуществления настоящего изобретения может быть необходимой патрульная инспекция многочисленных инспектируемых областей или многократное определение распределения радиоактивного вещества и оценка его позиции. В этих условиях этап 108 определения может добавляться после этапа 106 на фиг. 1. На этапе 108, если необходимо многократно определить распределение радиоактивного вещества и оценить его позицию, процесс будет возвращен к этапу 102 для повторного сбора обнаруженных данных и для продолжения следующих процедур; в противном случае процесс будет окончен. Разумеется, это может не обеспечивать этап 108 и непосредственно окончить весь процесс после того, как этап 106 был осуществлен, для определения позиции радиоактивного вещества.
В вариантах осуществления настоящего изобретения значения радиоактивной интенсивности могут быть указаны известными параметрами в данной области техники для характеристики радиоактивной интенсивности, такими как скорость счета или мощность дозы. Признаки в вышеупомянутых вариантах осуществления настоящего изобретения могут комбинироваться друг с другом для формирования новых вариантов осуществления, которые должны расцениваться как охватываемые объемом настоящего изобретения, если нет существенного противоречия этим признакам.
Настоящее изобретение также относится к устройству для патрульной инспекции и локализации радиоактивного вещества и для осуществления любого из проиллюстрированных выше способов, помимо вышеописанного способа для патрульной инспекции и локализации радиоактивного вещества. Устройство содержит детектор и подвижный носитель. Детектор выполнен с возможностью сбора значений радиоактивной интенсивности с инспектируемой области вокруг маршрута патрульной инспекции в каждой из многочисленных точек пробоотбора на маршруте патрульной инспекции. Подвижный носитель, например автомобильное транспортное средство, выполнен с возможностью переноса детектора и для перемещения по маршруту патрульной инспекции для прохождения мимо точек пробоотбора. Количеством детекторов может быть два, три, четыре или более, и детекторы могут быть обращены в различных направлениях вокруг точек пробоотбора, соответственно, и могут быть разделены деталью экранирования друг от друга, например экранирующей пластиной.
Хотя настоящее изобретение было объяснено со ссылками на чертежи, варианты осуществления, показанные на чертежах, только иллюстративны и не ограничивают настоящее изобретение.
Хотя некоторые варианты осуществления общей идеи изобретения иллюстрируются и объясняются, специалистам в данной области техники будет понятно, что модификации и вариации могут быть выполнены в этих вариантах осуществления без выхода за пределы принципов и сущности общей изобретательской концепции раскрытия, объем которой определен в пунктах прилагаемой формулы изобретения и их эквивалентах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2014 |
|
RU2562142C1 |
| Способ обнаружения и локализации подвижных источников ионизирующих излучений | 2018 |
|
RU2680671C1 |
| Способ поиска источников ионизирующих излучений | 2017 |
|
RU2655044C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ОБНАРУЖЕНИЯ ЧАСТИЦ В ПОЛЕЗНОМ АГЕНТЕ | 2013 |
|
RU2638913C2 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ПЛАНИРОВАНИЯ ВИДОВ В ОБЪЕМНЫХ ИЗОБРАЖЕНИЯХ МОЗГА | 2013 |
|
RU2523929C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ СКОЛЬЖЕНИЯ ЛЕГКОГО | 2017 |
|
RU2740257C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНСПЕКЦИИ ТЕЛА ЧЕЛОВЕКА НА ОСНОВЕ ОБРАТНОГО РАССЕИВАНИЯ | 2014 |
|
RU2602749C2 |
| РЕНТГЕНОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЩЕСТВА ВЛОЖЕНИЯ В ИНСПЕКТИРУЕМОМ ОБЪЕКТЕ ПО ЗНАЧЕНИЯМ ПЛОТНОСТИ И ЭФФЕКТИВНОСТИ АТОМНОГО НОМЕРА | 2008 |
|
RU2484451C2 |
| ОПРЕДЕЛЕНИЕ СТЕПЕНИ ОДНОРОДНОСТИ В ИЗОБРАЖЕНИЯХ | 2015 |
|
RU2721182C2 |


Использование: для патрульной инспекции и локализации радиоактивного вещества. Сущность изобретения заключается в том, что способ патрульной инспекции и локализации радиоактивного вещества содержит этапы: обеспечение значения фоновой радиоактивной интенсивности среды; сбор значений радиоактивной интенсивности с инспектируемой области посредством детектора во множестве точек пробоотбора на маршруте патрульной инспекции; вычисление распределения радиоактивной интенсивности в инспектируемой области на основе собранных значений радиоактивной интенсивности и значения фоновой радиоактивной интенсивности; и определение позиции радиоактивного вещества на основе распределения радиоактивной интенсивности; разделение инспектируемой области на множество подобластей. Технический результат: обеспечение возможности повышения эффективности обнаружения радиоактивных источников излучения. 2 н. и 13 з.п. ф-лы, 5 ил.
1. Способ патрульной инспекции и локализации радиоактивного вещества, содержащий этапы, на которых:
(a) обеспечивают значение фоновой радиоактивной интенсивности среды;
(b) собирают значения радиоактивной интенсивности от инспектируемой области посредством детектора в ряде точек пробоотбора на маршруте патрульной инспекции;
(c) вычисляют распределение радиоактивной интенсивности в инспектируемой области на основе собранных значений радиоактивной интенсивности и значения фоновой радиоактивной интенсивности;
(d) определяют позицию радиоактивного вещества на основе распределения радиоактивной интенсивности;
при этом этап (с) содержит этап (c1), на котором:
разделяют инспектируемую область на множество подобластей, обеспечивают эффективности обнаружения упомянутого детектора для подобластей и определяют радиоактивную интенсивность каждой подобласти на основе фоновой радиоактивной интенсивности и упомянутых эффективностей обнаружения.
2. Способ патрульной инспекции и локализации радиоактивного вещества по п. 1, в котором способ дополнительно содержит этап (b1) между этапом (b) и этапом (с), на котором:
определяют, больше ли различия между собранными значениями радиоактивной интенсивности и значениями фоновой радиоактивной интенсивности, чем порог сбора, и выполняют этап (с), если они
больше, чем порог сбора; в противном случае, если они не больше, чем порог сбора, обновляют значения фоновой радиоактивной интенсивности посредством средневзвешенного значения собранных значений радиоактивной интенсивности и значений фоновой радиоактивной интенсивности и возвращаются к этапу (b), чтобы повторно собрать значения радиоактивной интенсивности.
3. Способ патрульной инспекции и локализации радиоактивного вещества по п. 1, в котором способ дополнительно содержит этап (b2) между этапом (b) и этапом (с), на котором:
определяют, есть ли сегмент данных, в котором значения радиоактивной интенсивности резко падают и затем резко возрастают, в последовательности значений радиоактивной интенсивности, собранных во множестве непрерывных точек пробоотбора, и удаляют сегмент данных для устранения эффектов препятствий, если он присутствует.
4. Способ патрульной инспекции и локализации радиоактивного вещества по п. 1, в котором детектор содержит по меньшей мере два детектора, обращенных к инспектируемым областям в различных направлениях соответственно, причем детекторы разделены деталью экранирования друг от друга.
5. Способ для патрульной инспекции и локализации радиоактивного вещества по п. 1, в котором значения радиоактивной интенсивности представляются посредством скорости счета или мощности дозы.
6. Способ патрульной инспекции и локализации радиоактивного вещества по п. 1, в котором количество подобластей не больше, чем количество точек пробоотбора.
7. Способ патрульной инспекции и локализации радиоактивного вещества по п. 1, в котором эффективности обнаружения калибруются для некоторого конкретного диапазона энергии излучения и/или вида радиоактивного вещества.
8. Способ патрульной инспекции и локализации радиоактивного вещества по п. 1, в котором этап (с) дополнительно содержит этап (с2), на котором:
чертят карту распределения радиоактивной интенсивности в инспектируемой области на основе радиоактивной интенсивности в каждой подобласти.
9. Способ патрульной инспекции и локализации радиоактивного вещества по п. 1, в котором разделение подобластей осуществляется в одном измерении, двух измерениях или трех измерениях.
10. Способ патрульной инспекции и локализации радиоактивного вещества по п. 1, в котором детектор обеспечен на подвижном носителе, причем собранное значение радиоактивной интенсивности равно

где m - индекс подобластей, m=1, …, М, М - полное количество подобластей, bt - значение фоновой радиоактивной интенсивности, рm - позиция m-й подобласти, аm - значение радиоактивной интенсивности m-й подобласти, qt - позиция подвижного носителя, θt - угол направления подвижного носителя, Ф(pm, qt, θt) - эффективность обнаружения детектора для позиции рm, если подвижный носитель находится в позиции qt с углом θt
направления, t - индексы собранных значений радиоактивной интенсивности, t=1, …, N, N - полное количество собранных значений радиоактивной интенсивности, εt - ошибка сбора.
11. Способ патрульной инспекции и локализации радиоактивного вещества по п. 10, в котором этап (c1) выполняется путем разреженного разложения вектора С на векторном множестве D, где вектор C=(c1-b1, …, cN-bN)T, векторное множество D={Dm}, Dm =(Ф(pm, q1, θ1), …, Ф(pm, qN, θN))T.
12. Способ патрульной инспекции и локализации радиоактивного вещества по п. 11, в котором этап определения радиоактивной интенсивности каждой подобласти дополнительно содержит этапы, на которых:
(c11) выявляют множество S индексов и вектор невязки R и устанавливают исходное значение S0 множества S как пустое множество, исходное значение R0 вектора невязки R как вектор С и исходное значение аm как ноль;
(с12) выявляют проекцию R0 на вектор Dm в векторном множестве D как Рm, определяют значение m, соответствующее максимуму Рm, как n, затем добавляют n к S0 для обновления множества S и обновляют вектор невязки R так, чтобы обновленный вектор невязки R был разностью между вектором С и проекцией вектора С на вектор Dn;
(с13) определяют, меньше ли норма обновленного вектора невязки R, чем порог невязки, и, если норма меньше, чем порог невязки, аm будет вычисляться как коэффициент проекции вектора С на вектор Dm, где, только если m попадает в обновленное множество S, результат вычисления аm ненулевой, в то время как,
если m не попадает в обновленное множество S, результат вычисления аm равен нулю; в противном случае, если норма обновленного вектора невязки R меньше, чем порог невязки, R0 и S0 будут замещены обновленным вектором невязки R и обновленным множеством S соответственно для повторного выполнения этапа (с12) для повторяющегося обновления вектора невязки R и множества S, пока норма обновленного вектора невязки R не станет меньше, чем порог невязки, или количество циклов повторяющегося выполнения этапа (с12) не удовлетворит предварительно определенному значению.
13. Способ патрульной инспекции и локализации радиоактивного вещества по п. 12, в котором этап (d) содержит этап, на котором:
(d1) определяют подобласть, в которой результат вычисления аm ненулевой, в качестве активной подобласти и определяют подобласть, в которой находится радиоактивное вещество, на основе распределения активной подобласти и результата вычисления am.
14. Способ патрульной инспекции и локализации радиоактивного вещества по п. 13, в котором этап (d1) содержит этап, на котором:
численно вычисляют позицию активной подобласти, когда функция ошибки принимает минимальное значение, причем функция ошибок имеет вид
где l=x1, …, xL, L - полное количество активной подобласти, x1, …, xL - индексы подобласти, которая является
активной подобластью, и p1 будет более точной позицией, когда функция ошибки Н принимает минимальное значение.
15. Устройство для патрульной инспекции и локализации радиоактивного вещества и для осуществления способа по любому из пп. 1-14, причем устройство содержит:
два или более детектора, выполненных с возможностью сбора значений радиоактивной интенсивности с инспектируемой области вокруг маршрута патрульной инспекции в каждой из ряда точек пробоотбора на маршруте патрульной инспекции; и
подвижный носитель, выполненный с возможностью переноса детектора и перемещения по маршруту патрульной инспекции для прохождения по точкам пробоотбора,
причем детекторы обращены в различных направлениях вокруг точек пробоотбора, соответственно, и разделены деталью экранирования друг от друга.
| ZHANG, Wen et al | |||
| Design of y-Ray vehicle patrol system based on GPS, Nuclear Electronics & Detection Technology, April 2011, Vol | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Электромагнитное реле | 1922 |
|
SU466A1 |
| US 2011062344 A1 17.03.2011 | |||
| WO 2008089173 A1 24.07.2008 | |||
| Электромагнитный тормоз | 1927 |
|
SU6909A1 |

