Изобретение относится к области конструирования велосипедов, в частности к разработке способов управления поворотом и к конструкции узла поворота велосипеда.
Широко известен типичный велосипед (см. Википедия - https://ru.wikipedia.org/wiki/Велосипед), который состоит из вертикальной рамы, Т-образного руля, жестко скрепленного со стойкой переднего колеса велосипеда, при этом руль со стойкой прикреплен к несущей части рамы через шарнир, с возможностью поворота руля со стойкой и с передним колесом вокруг продольной оси стойки. Кроме того, в состав велосипеда входят заднее колесо, установленное в заднюю вилку, седло (сиденье), прикрепленное к верхней части рамы, педали с кривошипами, цепная передача и тормоза.
При этом левая и правая части руля изогнуты симметрично по бокам относительно вертикальной плоскости рамы в виде криволинейных ручек руля, они обычно составляют с рулем единое целое, с возможностью поворота всей рулевой конструкции, как целое, вокруг оси указанной стойки переднего колеса. При этом соответственно поворачивается плоскость переднего колеса, и велосипед поворачивает по требуемой траектории необходимой кривизны (далее - поворачивает по колее).
Недостатки. Основным недостатком такого велосипеда является ненадежность левой и правой ручек руля в качестве устойчивой опоры для рук, которые несут тяжесть торса велосипедиста. Это происходит из-за возможности свободного поворота этих ручек вокруг общей указанной оси, что приводит к необходимости дополнительного контроля велосипедистом равновесия на велосипеде с одновременным обеспечением устойчивости движения, в зависимости от положения ручек руля.
Для поворота велосипеда в ту или иную сторону необходимо повернуть ручки руля, а именно, сдвинуть одну ручку к велосипедисту, а другую - от него. При этом дополнительно к боковому смещению туловища для сохранения равновесия на велосипеде приходится отклоняться вперед или назад и поворачиваться телом для одновременного поворота руля и обеспечения надежности опоры рук на руль. Эти действия сопровождаются напряжением определенных групп мышц, которые используются обычно редко, что нередко приводит к потере устойчивости велосипеда, равновесия и к падению велосипедиста.
Известно транспортное средство (см. патент RU на изобретение №2147537 от 21.02.1995 г. «Способ передвижения и управления транспортным средством и транспортное средство для его осуществления»).
В этом аналоге транспортное средство (далее - ТС) содержит раму, выполненную из передней и задней частей, шарнирно соединенных между собой, с возможностью поворота вокруг общей вертикальной оси в месте их соединения, два узла крепления колес, установленные один за другим на концах рамы, седло, расположенное над вертикальной осью соединения частей рамы, это седло дополнительно снабжено подседельной стойкой, один конец которой соединен с верхней частью оси при помощи шарнира, позволяющего стойке наклоняться вперед-назад по ходу движения, другой конец стойки соединен с нижней частью седла при помощи шарнира, с возможностью наклона седла в вертикальной плоскости, проходящей через центры колес, седло вместе с осью выполнено с возможностью поворота в горизонтальной плоскости.
Кроме того, подседельная стойка имеет элемент регулирования и фиксации ее длины, а седло шарнирно соединено с одним концом тяги, также имеющей элемент регулирования ее длины и установленной параллельно стойке, другой конец тяги шарнирно соединен с верхней частью оси. Кроме того, каждый из узлов крепления колес выполнен в виде вилки, внутри которой на оси узла расположено свободно вращающееся колесо или колесная тележка, а педаль расположена вне вилки на продолжении оси узла, причем на переднем узле педаль расположена с одной стороны колеса, а на заднем узле - с противоположной.
Передвижение и управление ТС осуществляется путем качения человека в положении ходьбы или в сидячем положении на седле, укрепленном на расположенных друг за другом колесах, которые, как указано выше, связаны друг с другом и седлом. Вертикальные плоскости колес поворачиваются ногами пользователя ТС относительно общей вертикальной оси, находящейся между ними. Дополнительно качение совмещают с элементами шагающего движения, при этом каждую ногу пользователя соединяют через педаль с колесом (одну справа, другую слева), а управление осуществляют при помощи поворота ног и переноса центра тяжести человека. Таким образом, поворот ТС в движении может осуществляться путем поворота плоскости как переднего, так и заднего колес одновременно или раздельно относительно вертикальной оси и седла, что обеспечивает передвижение колес и ТС по колее.
Недостатки. Представленное в аналоге ТС решает другую задачу по сравнению заявленным техническим решением.
В аналоге передача усилия поворота и управление поворотом осуществляется путем поворота и нажима ступней ног, да еще необходимо одновременно ногами приводить ТС в движение, что часто является неудобным и плохо выполнимым. При этом необходимо регулярно (или в основном) вставать с седла, ехать стоя и, соответственно, менять положение равновесия. В результате положение пользователя относительно ТС является сильно неустойчивым. Кроме того, ноги пользователя фактически привязаны к педалям, что является серьезным неудобством для него и может привести к падению пользователя и травме.
При консольной конструкции педалей и для обеспечения их правильного положения относительно рамы, необходимо обеспечить соответствующие прочностные и конструкторские характеристики крепления педалей к основе, что значительно усложнит и утяжелит шарнирную конструкцию ТС.
В качестве прототипа узла поворота велосипеда, представленного в предложенном изобретении, принят велосипед, изготовленный Г-У-Реймерсом (Hans-Ulrich Reimers) - см. статью Эрика Ваннее (Erik Wannee): «Велосипеды с задним рулевым колесом - ВЗРК» на сайте www.wannee.nl/hpv/abt/ru-index.htm.
Конструкция велосипеда похожа на Флево-Байк (FlevoBike), но здесь седло закреплено на передней части рамы (поворотной относительно задней части). Педальный привод осуществляется на переднее колесо, плоскость которого совпадает с вертикальной плоскостью передней части рамы. Кроме того, управление поворотом велосипеда осуществляется двумя ручками в виде левого и правого рычагов, закрепленных симметрично по бокам передней части рамы под седлом. Каждая ручка имеет возможность поворота вокруг собственной оси. Оси поворота ручек лежат на одной прямой, перпендикулярной к плоскости передней части рамы. Каждая ручка через кривошип, шарниры и тягу связана со своей стороны с соответствующим плечом задней части рамы (эти плечи перпендикулярны плоскости данной части рамы), в вертикальной плоскости которой сзади закреплено заднее колесо.
Усилие поворота одной, например, левой ручки-рычага через тягу передается на левое плечо задней части рамы и поворачивает раму в соответствующую сторону относительно передней части. Соответственно взаимно поворачиваются плоскости переднего и заднего колес. В итоге происходит поворот велосипеда по колее. При этом правая ручка-рычаг связана с левой ручкой через последовательную кинематическую связь, а именно: поворот правой ручки / передача правой тягой / поворот правого плеча задней рамы (как одно целое) поворачивает левое плечо задней рамы / передача левой тягой / поворот левой ручки. При этом ручки поворачиваются во взаимно противоположные стороны.
Недостатки узла поворота и велосипеда в целом.
Ввиду расположения осей поворота ручек-рычагов внизу под сиденьем для рук и верхней части туловища велосипедиста отсутствует надежная, стабильная опора, которая особенно необходима при поддержании равновесия и устойчивости движения во время резких поворотов и ускорений.
При резком повороте в некоторых определенных положениях велосипедиста одна из ручек, из-за больших размеров, мешает велосипедисту свободно наклониться в нужную сторону для компенсации силы перевеса, чтобы поддержать равновесие.
К тому же конструктивное размещение элементов кинематической связи в прототипе, таких как рычаги, тяги и др., мешает свободному расположению велосипедиста при посадке на велосипед и в движении.
Кроме того, ввиду особенностей данной конструкции узла поворота и велосипеда в целом, велосипед невозможно (и не предполагается) трансформировать: перенастроить геометрию велосипеда под параметры велосипедиста, под параметры назначения велосипеда, ил и обеспечить возможность его складывания для транспортировки и/или хранения.
Задачей, решаемой представленным изобретением, является создание способа передачи усилия для управления поворотом велосипеда, а также узла поворота велосипеда. В результате решения задачи получаем следующий технический результат изобретения.
- Предложенный узел поворота велосипеда содержит две ручки, закрепленные по бокам на раме велосипеда. При этом каждая ручка имеет собственную ось поворота, неподвижную относительно рамы.
Особенностью конструкции узла поворота и собственно велосипеда является использование трехзвенных подузлов и валов передачи при передаче усилия поворота от ручек на ось соответствующего управляемого колеса велосипеда. Это позволяет с большой свободой выбрать место размещения этих ручек по бокам симметрично относительно плоскости рамы велосипеда, но преимущественно, их размещают впереди, в месте, удобном для опоры рук велосипедиста. Кроме того, форма каждой ручки позволяет ее удобно обхватить пальцами и/или кистью руки, опираться и управлять поворотом велосипеда, не смещая туловища. Таким образом, для рук и, соответственно, для тела велосипедиста имеется надежная неподвижная опора, которая вместе с другими точками опоры (седло, педали) позволяет велосипедисту, сидя или в другом положении, более свободно сохранять равновесие в процессе движения и при повороте велосипеда. В результате, повышается безопасность перемещения на велосипеде.
- Также, благодаря неподвижности осей ручек, велосипедист, удерживая их, в процессе движения велосипеда может по своему желанию более свободно привстать, встать, отклониться в ту или иную сторону от своего стационарного состояния, что снизит нагрузку на мышцы и общую нагрузку в целом.
- Предложен ряд различных вариантов способа передачи усилия велосипедиста и конструкции кинематических связей ручек узла поворота на управляемые переднее и/или заднее колесо велосипеда, которые позволяют однотипным образом компактно через валы передачи передать усилие от ручек на соответствующую(ие) опору колеса (опоры колес) велосипеда.
- При конструировании узла поворота велосипеда, в соответствии с вариантами изобретения, разработчик имеет возможность применить для кинематических связей как зубчатые колеса: цилиндрические, конические и/или другой формы, так и элементы рычажной передачи, тросовых тяг, штифтовых передач, и/или прорезных кулис, закрепленных соосно на соответствующей ручке, на соответствующей оси и/или на соответствующем вале, а также винтовую, гипоидную и другие виды передач.
- С целью компактной передачи усилия поворота, имеется возможность разместить продольные элементы узла поворота (валы и др. продольные элементы) в несущих (трубчатых) элементах рамы велосипеда. Такое размещение практически скроет конструкцию узла поворота внутри рамы велосипеда, что позволит велосипедисту свободно располагаться и смещаться относительно рамы в процессе движения велосипеда, не боясь зацепиться за элементы узла поворота. Также, при прочих равных условиях, улучшится обтекаемость и уменьшится сопротивление велосипеда потоку воздуха при движении.
- При этом для обеспечения возможности трансформации геометрии велосипеда, конструкция продольных элементов узла поворота и несущих элементов рамы велосипеда может быть выполнена в виде их телескопического соединения с возможностью фиксации на заданной длине. Эта особенность конструкции необходима для возможной перенастройки велосипеда под параметры велосипедиста, под параметры назначения велосипеда, а также для возможности его складывания при транспортировке и/или хранении.
- В данной заявке рассматриваются варианты велосипеда с одним передним и одним задним колесом, при этом предложенное техническое решение также можно применить для велосипедов с двумя передними и/или с двумя задними колесами.
Указанный технический результат достигается в способе передачи усилия для управления поворотом велосипеда, заключающемся в том, что
в процессе движения велосипеда велосипедист поворачивает левую и/или правую ручку узла поворота велосипеда вокруг оси ее поворота,
указанные две ручки имеют раздельные оси поворота и закреплены по обеим сторонам рамы велосипеда,
при этом для сохранения равновесия и устойчивости движения велосипедист смещает центр тяжести свой и/или велосипеда относительно опорных точек велосипеда с землей,
при этом конструкция узла поворота велосипеда предусматривает кинематическую связь указанных ручек с поворачиваемыми опорами переднего, заднего или обоих колес через одно или более кинематических звеньев, пар, в том числе, в виде левой и правой последовательности звеньев, передающих усилие поворота от соответствующей ручки на поворот опоры переднего колеса и/или на поворот опоры заднего колеса велосипеда.
Здесь и далее под опорой колеса велосипеда подразумевается стойка, вилка или перо, к которому крепится ось и/или втулка колеса велосипеда. В результате поворота опоры того или иного колеса, соответственно поворачивается плоскость этого колеса, обеспечивая поворот велосипеда.
Способ отличается от аналогов тем, что
в случае поворота велосипеда путем поворота переднего или заднего колеса, велосипедист передает усилие поворота от указанных ручек на опору переднего или заднего колеса через кинематические звенья, которые объединены в подузел - трехзвенную передачу одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота, передающий это усилие, непосредственно или через одно или более вторичных кинематических звеньев, на опору переднего колеса (далее пишем - первичный вал поворота плоскости переднего колеса), или на первичный вал поворота, передающий это усилие, непосредственно или через одно или более вторичных кинематических звеньев, на опору заднего колеса (далее пишем - первичный вал поворота плоскости заднего колеса),
или, в случае поворота велосипеда путем поворота переднего и заднего колес одновременно (далее имеется один из трех вариантов передачи усилия поворота ручек на опоры колес i, ii, iii):
i) велосипедист передает усилие поворота от указанных ручек на оба колеса одновременно через кинематические звенья, которые объединены в подузел - трехзвенную передачу одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса, при этом также от этого вала его поворот через другую кинематическую пару передается на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса,
ii) велосипедист передает усилие поворота от указанных ручек на оба колеса одновременно через кинематические звенья, которые объединены в подузел - трехзвенную передачу одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса, при этом также от этого вала его поворот через другую кинематическую пару передается на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса,
iii) велосипедист передает усилие поворота от указанных ручек на оба колеса одновременно через кинематические звенья, которые объединены в сложный подузел: первая трехзвенная передача передает усилие поворота одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса, и параллельно вторая трехзвенная передача передает усилие поворота одновременно от каждой той же ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса,
(в варианте iii первичные валы поворота плоскостей переднего и заднего колес не связаны между собой прямой связью, как кинематическая пара, а связаны опосредованно, через кинематическую связь каждого вала с ручками узла поворота велосипеда),
при этом каждая указанная ручка узла поворота или ее часть имеет такую форму, размеры и расположена так, чтобы велосипедист для передачи усилия поворота имел возможность ее обхватить и повернуть в нужную сторону вокруг оси поворота пальцами и/или кистью соответствующей руки, независимо от поворота или смещения своего торса.
В частности, в способе ручки узла поворота велосипеда и их оси поворота расположены симметрично - по бокам относительно рамы велосипеда, в передней ее части.
В частности, в способе каждую ручку выполняют в виде одинаковых трубки или стержня, имеющего цилиндрическую или близкую к цилиндрической форму, расположенных симметрично относительно вертикальной плоскости рамы велосипеда, с возможностью поворота каждой ручки вокруг оси ее поворота, совпадающей или параллельной оси цилиндра.
В частности, в способе на каждой ручке закреплен или сама ручка представляет собой рычаг или курковый толкатель, преимущественно одинаковой формы, перпендикулярный или наклонный к оси поворота ручки, расположенные симметрично относительно вертикальной плоскости рамы велосипеда, с возможностью поворота рычага или толкателя вместе с ручкой вокруг оси поворота ручки.
В частности, в способе для поворота велосипеда велосипедист поворачивает левую и правую ручки поворота в противоположные стороны.
В частности, в способе передачу усилия от ручек узла поворота и зацепление соответствующих кинематических пар осуществляют с использованием одного или более зубчатых колес, преимущественно, конических и/или цилиндрических, и закрепленных соосно на соответствующей ручке, соответствующей оси и/или на соответствующем вале.
В частности, в способе, передачу усилия от ручек узла поворота и зацепление соответствующих кинематических пар осуществляют с использованием одного или более рычажных элементов, тросовых тяг, штифтовых передач и/или прорезных кулис, закрепленных соосно на соответствующей ручке, на соответствующей оси и/или на соответствующем вале.
Технический результат также достигается в узле поворота велосипеда, содержащем
левую и правую ручку поворота велосипеда, которые закреплены с обеих сторон на раме велосипеда с возможностью поворота каждой ручки раздельно вокруг собственной оси, неподвижной относительно рамы,
а также, закрепленный на раме велосипеда, механизм передачи усилия поворота от каждой или обеих ручек на опоры поворачиваемых переднего, заднего или обоих колес через кинематическую связь в виде одного или более кинематических звеньев, пар, в том числе, в виде левой и правой последовательности звеньев для передачи усилия поворота от соответствующей ручки на поворот плоскости переднего колеса и/или на поворот плоскости заднего колеса велосипеда,
при этом сами ручки поворота и элементы механизма передачи усилия поворота ручек на поворот плоскости колес, в том числе, первичные элементы кинематических звеньев передачи поворота ручек на опоры колес, преимущественно могут быть размещены и закреплены на раме в передней части велосипеда в области привычного расположения кистей рук велосипедиста.
Узел поворота велосипеда отличается от аналогов тем, что
в случае поворота велосипеда с помощью переднего или заднего колеса, кинематические звенья передачи усилия поворота от каждой из указанных ручек представляют собой конструктивное объединение в подузел - трехзвенную передачу одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса или на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса,
или, в случае поворота велосипеда с помощью переднего и заднего колес одновременно (далее имеется один из трех вариантов передачи усилия поворота ручек на опоры колес i, ii, iii):
i) кинематические звенья передачи усилия поворота от каждой из указанных ручек представляют собой конструктивное объединение в подузел - трехзвенную передачу одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса, при этом также от этого вала его поворот через другую кинематическую пару передается на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса,
ii) кинематические звенья передачи усилия поворота от каждой из указанных ручек представляют собой конструктивное объединение в подузел - трехзвенную передачу одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса, при этом также от этого вала его поворот через другую кинематическую пару передается на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса,
iii) кинематические звенья передачи усилия поворота от каждой из указанных ручек представляют собой конструктивное объединение в сложный подузел: первая трехзвенная передача передает усилие поворота одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса, и параллельно вторая трехзвенная передача передает усилие поворота одновременно от каждой той же ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса,
при этом каждая указанная ручка узла поворота имеет такую форму, размеры и расположена так, чтобы велосипедист для передачи усилия поворота имел возможность ее обхватить и повернуть в нужную сторону вокруг ее оси пальцами и/или кистью соответствующей руки, независимо от поворота или смещения своего торса,
при этом каждую ручку выполняют, преимущественно, в виде одинаковых трубки или стержня, имеющего цилиндрическую или близкую к цилиндрической форму, расположенных симметрично по бокам относительно вертикальной плоскости рамы велосипеда, с возможностью поворота каждой ручки вокруг оси ее поворота, совпадающей или параллельной оси цилиндра,
и/или на каждой ручке закреплен или сама ручка представляет собой рычаг или курковый толкатель, преимущественно одинаковой формы, перпендикулярный или наклонный к оси поворота ручки, ручки при этом расположены симметрично относительно вертикальной плоскости рамы велосипеда, с возможностью поворота рычага или толкателя вместе с ручкой вокруг оси поворота ручки,
при этом также для передачи усилия поворота левая и правая ручки узла поворота велосипеда должны иметь конструктивную возможность поворачиваться в противоположные стороны,
причем передача усилия поворота от ручек и зацепление кинематических пар может осуществляться преимущественно с использованием, в том числе, одного или более зубчатых колес, преимущественно, конических и/или цилиндрических, и закрепленных соосно на соответствующей ручке, на соответствующей оси и/или на соответствующем вале,
и/или с использованием одного или более рычажных элементов, тросовых тяг, штифтовых передач и/или прорезных кулис, закрепленных соосно на соответствующей ручке, на соответствующей оси и/или на соответствующем вале,
причем внутри одного или более несущих трубчатых элементов рамы велосипеда имеется возможность разместить первичный(е) вал(ы) поворота плоскости переднего и/или заднего колес и/или элементы промежуточных или вторичных кинематических пар передачи усилия поворота на опоры колес велосипеда,
при этом один или более элементов рамы, в том числе трубчатый элемент рамы, размещенный в нем вал поворота плоскости переднего и/или заднего колес и/или продольный элемент кинематической пары могут иметь по длине телескопическое соединение, с возможностью фиксации на заданной длине.
Изобретение поясняется примерами, которые проиллюстрированы следующими фигурами (от 1 до 10).
На фиг. 1, 2, 4, 5, 7, 8, 10 (схема), в соответствии с представленным изобретением, показаны варианты выполнения звеньев, передающих усилие поворота от ручек узла поворота велосипеда к первичному валу поворота плоскости переднего колеса, к первичному валу поворота плоскости заднего колеса и/или к первичным валам поворота плоскостей обоих колес велосипеда,
при этом остальные элементы узла поворота (корпус, посадочные места, последующие звенья и т.п.) на фигурах не показаны. Также не показаны остальные элементы велосипеда, в том числе несущие элементы рамы. На фиг. 10 опорные неподвижные элементы обозначены косой штриховкой.
На фиг. 1 показан вид сбоку на кинематические звенья узла поворота велосипеда. Здесь показаны два варианта узла поворота велосипеда: (вариант 1) узла с поворотом плоскости переднего колеса показан сплошными линиями, (вариант 2) узла с поворотом плоскостей обоих колес велосипеда (в формуле изобретения этот вариант обозначен - i) показан теми же сплошными линиями совместно с пунктирными. Вид показан в плоскости симметрии узла поворота, совпадающей с вертикальной плоскостью рамы велосипеда, причем переднее колесо велосипеда расположено справа.
На фиг. 2, показан вид сзади велосипеда на кинематическое звено (вариант 1) узла поворота плоскости переднего колеса велосипеда, показанного на фиг. 1 (сплошные линии). Стрелками показано направление поворота ручек и шестерен при повороте велосипеда направо.
На фиг. 3 показан вид сверху на след переднего колеса велосипеда в случае поворота плоскости этого колеса. Стрелкой показано направление поворота следа колеса при повороте велосипеда направо.
На фиг. 4 показан вид сбоку на кинематические звенья узла поворота велосипеда. Показаны два варианта узла поворота: (вариант 3) узла с поворотом плоскости заднего колеса показан сплошными линиями, (вариант 4) узла с поворотом плоскостей обоих колес велосипеда (в формуле он обозначен - ii) показан теми же сплошными линиями совместно с пунктирными. Вид показан в плоскости симметрии узла поворота, совпадающей с вертикальной плоскостью рамы велосипеда, причем переднее колесо велосипеда расположено справа.
На фиг. 5 показан вид сзади велосипеда на кинематическое звено (вариант 3) узла поворота плоскости заднего колеса велосипеда, показанного на фиг. 4 (сплошные линии). Стрелками показано направление поворота ручек и шестерен при повороте велосипеда направо.
На фиг. 6 показан вид сверху на след заднего колеса велосипеда в случае поворота плоскости этого колеса. Стрелкой показано направление поворота следа колеса велосипеда при повороте велосипеда направо.
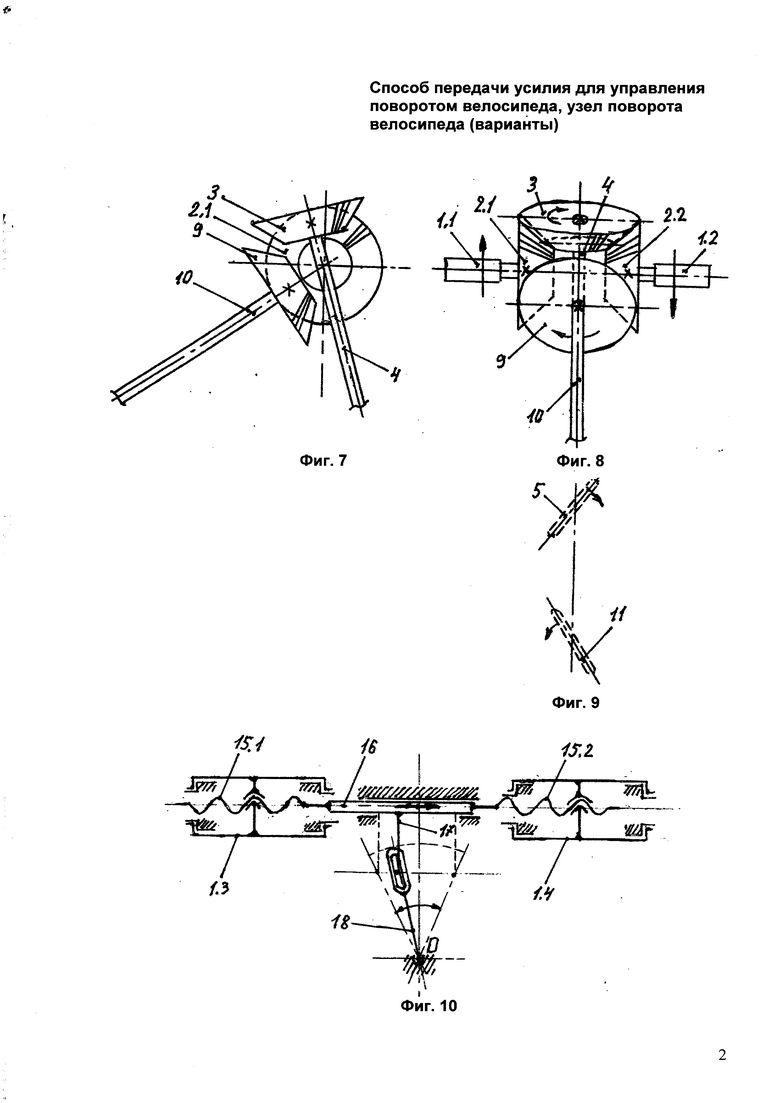
На фиг. 7 показан вид сбоку на кинематические звенья узла поворота велосипеда. Показан (вариант 5) узла с поворотом плоскостей обоих колес велосипеда (в формуле он обозначен - iii). Вид показан в плоскости симметрии узла поворота, совпадающей с вертикальной плоскостью рамы велосипеда, причем переднее колесо велосипеда расположено справа.
На фиг. 8 показан, для того же варианта iii, что на фиг. 7, вид сзади велосипеда на кинематические звенья узла поворота. Стрелками показано направление поворота ручек и шестерен при повороте велосипеда направо.
На фиг. 9 показан вид сверху на след переднего и след заднего колес велосипеда в случае поворота велосипеда с помощью обоих колес по одному из вариантов i, ii и iii. Стрелками показано направление поворота следа указанных колес при повороте велосипеда направо.
На фиг. 10 показана кинематическая схема одного из вариантов выполнения узла поворота велосипеда с использованием винтовой передачи усилия от ручек на вал поворота плоскости одного или двух колес велосипеда. На этой фигуре вид расположен так, что ось поворота вала, который передает усилие поворота далее на опору колеса, перпендикулярна плоскости чертежа и пересекается с ней в точке О.
Осуществление изобретения.
Во всех примерах узел поворота велосипеда содержит
левую и правую ручку поворота велосипеда, которые закреплены с обеих сторон на раме велосипеда с возможностью поворота каждой ручки вокруг собственной оси, неподвижной относительно рамы,
а также закрепленный на раме велосипеда механизм передачи усилия поворота каждой или обеих ручек на опоры поворачиваемых переднего, заднего или обоих колес через кинематическую связь в виде одного или более кинематических звеньев, пар, в том числе, в виде левой и правой последовательности звеньев для передачи усилия поворота от соответствующей ручки на поворот плоскости переднего колеса и/или на поворот плоскости заднего колеса велосипеда.
При этом сами ручки поворота и элементы механизма передачи усилия поворота ручек на поворот колес, в том числе, первичные элементы кинематических звеньев передачи поворота ручек на опоры колес, размещены и закреплены на раме в передней части велосипеда в области привычного расположения кистей рук велосипедиста.
Вариант 1 кинематической связи узла поворота велосипеда показан на фиг. 1 (сплошные линии), а также на фиг. 2. В нем узел поворота велосипеда обеспечивает поворот велосипеда с помощью только переднего колеса.
В этом варианте кинематические звенья передачи усилия поворота от ручек узла поворота представляют собой конструктивное объединение в подузел - трехзвенную передачу усилия поворота одновременно от левой ручки 1.1 и правой ручки 1.2 узла поворота непосредственной кинематической связью на первичный вал 4 поворота плоскости переднего колеса и, соответственно, далее на опору этого колеса.
Отметим, что в вариантах, показанных на фиг. 1, 2, 4, 5, 7, 8, передача усилия поворота ручек и зацепление кинематических пар осуществляется с использованием конических зубчатых колес (далее назовем их - шестерни), и закрепленных соосно на соответствующей ручке, на соответствующей оси и/или на соответствующем вале, хотя указанная передача может осуществляться с использованием, в том числе, цилиндрических зубчатых колес и/или рычажных элементов, штифтовых передач и/или прорезных кулис, закрепленных соосно на соответствующей ручке, на соответствующей оси и/или на соответствующем вале, а также с использованием винтовой, глобоидной и других видов передач.
В примерах на фиг. 1 и фиг. 2 на ручках 1.1 и 1.2 соосно закреплены (или жестко на них посажены) соответствующие шестерни 2.1 и 2.2, которые находятся в зацеплении с шестерней 3, также соосно закрепленной на первичном вале 4 поворота плоскости переднего колеса. В данном примере вал поворота 4 находится в зацеплении или непосредственно скреплен с опорой поворачиваемого переднего колеса велосипеда.
Также в вариантах, показанных на фиг. 1, 2, 4, 5, 7, 8, 10 (схема), предполагается, что каждая указанная ручка узла поворота имеет такую форму, размеры и расположена так, чтобы велосипедист для передачи усилия поворота имел возможность ее обхватить и повернуть в нужную сторону вокруг ее оси пальцами и/или кистью соответствующей руки, независимо от поворота или смещения своего торса.
При этом в возможных вариантах узла поворота каждую ручку выполняют, преимущественно, в виде одинаковых трубки или стержня, имеющего цилиндрическую или близкую к цилиндрической форму, расположенных симметрично по бокам относительно вертикальной рамы велосипеда, с возможностью поворота каждой ручки вокруг оси ее поворота, совпадающей или параллельной оси цилиндра,
и/или на каждой ручке может быть закреплен или сама ручка может представлять собой рычаг или курковый толкатель, преимущественно одинаковой формы, перпендикулярный или наклонный к оси поворота соответствующей ручки, при этом ручки расположены симметрично относительно вертикальной плоскости рамы велосипеда, с возможностью поворота рычага или толкателя вместе с ручкой вокруг оси поворота ручки,
при этом также для передачи усилия поворота левая и правая ручки узла поворота велосипеда должны иметь конструктивную возможность поворачиваться в противоположные стороны.
Причем внутри одного или более несущих трубчатых элементов рамы велосипеда имеется возможность разместить первичный(е) вал(ы) поворота плоскостей переднего и/или заднего колес и/или элементы промежуточных или вторичных кинематических звеньев, пар передачи усилия поворота на опоры колес велосипеда,
при этом один или более элементов рамы, в том числе трубчатый элемент рамы, размещенный в нем вал поворота плоскости переднего и/или заднего колес и/или продольный элемент кинематического звена могут иметь по длине телескопическое соединение, с возможностью фиксации на заданной длине.
В примерах, показанных на фиг. 1, 2, 4, 5, 7, 8, указанные ручки 1.1 и 1.2 выполнены в виде пары одинаковых цилиндрических стержней, ось каждого цилиндра совпадает с осью поворота соответствующей ручки, в примерах указанные оси находятся на одной линии, перпендикулярной плоскости симметрии узла поворота (которая совпадает с плоскостью рамы велосипеда).
В варианте 1 (фиг. 1, 2 - сплошные линии), работа узла поворота велосипеда и способ осуществляются следующим образом.
В процессе движения велосипеда велосипедист, например, для поворота направо, поворачивает левую ручку 1.1 узла поворота велосипеда вокруг оси ее поворота (ладонью на ручке сверху от себя по окружности цилиндра ручки). При этом правая ручка 1.2, связанная через шестерни 2.1-3-2.2 с ручкой 1.1, имеет возможность повернуться в противоположную сторону, а ладонь велосипедиста помогает ей повернуться и, путем поворота обеих ручек, передать усилие на вал 4, который в данном случае поворачивает плоскость переднего колеса велосипеда направо. На фиг. 3 показан след 5 контакта переднего колеса велосипеда с землей, а стрелкой указан поворот его плоскости.
Таким образом, благодаря соответствующему повороту ручек 1.1, 1.2, осуществляется поворот плоскости переднего колеса (и его следа 5) направо, поэтому велосипед по колее поворачивает направо. При повороте соответствующих ручек в обратную сторону велосипед поворачивает налево.
Кроме того, во всех вариантах способа и работы узла поворота, для сохранения равновесия и устойчивости велосипеда, в процессе движения велосипедист смещает центр тяжести свой и/или велосипеда относительно опорных точек велосипеда с землей в сторону, противоположную направлению толкающих сил.
Вариант 2 кинематической связи узла поворота велосипеда показан на той же фиг. 1 сплошными и пунктирными линиями совместно.
Он соответствует повороту велосипеда путем поворота плоскости переднего и заднего колес одновременно, при этом конструкция узла поворота соответствует варианту i (см. существенные признаки и формулу изобретения).
По этому варианту кинематические звенья передачи усилия поворота от ручек узла поворота представляют собой конструктивное объединение в подузел - трехзвенную передачу усилия поворота одновременно от каждой указанной ручки 1.1 и 1.2 на соответствующие шестерни 2.1 и 2.2, закрепленные каждая соосно на соответствующей ручке, эти шестерни связаны зацеплением непосредственно с шестерней 3. Последняя закреплена на первичном вале поворота 4 плоскости переднего колеса и передает, соответственно, усилие поворота далее на опору переднего колеса. При этом также от указанного вала 4 его поворот через другую кинематическую пару передается на первичный вал поворота 8 плоскости заднего колеса и, соответственно, далее на опору заднего колеса. Эта другая пара показана пунктиром, она образует зацепление шестерни 6, закрепленной соосно на вале 4, и шестерни 7, закрепленной соосно на вале 8, который также показан пунктиром.
В варианте 2 (фиг. 1 - сплошные и пунктирные линии совместно) работа узла поворота велосипеда и способ осуществляются следующим образом.
В процессе движения велосипеда велосипедист, например, для поворота направо, поворачивает левую 1.1 и/или правую 1.2 ручку узла поворота велосипеда вокруг ее оси таким же образом, как и в предыдущем варианте 1. Усилие, переданное на вал 4, поворачивает плоскость переднего колеса велосипеда направо (см. след 5 переднего колеса на фиг. 9). Одновременно шестерня 6, закрепленная на этом вале, своим зацеплением с шестерней 7, обеспечивает поворот вала 8, который поворачивает плоскость заднего колеса велосипеда налево (см. след 11 заднего колеса на той же фиг. 9). Стрелками показан поворот следа каждого колеса при повороте велосипеда направо.
Таким образом, благодаря соответствующему повороту ручек 1.1, 1.2, осуществляется одновременный поворот плоскости переднего колеса (и его следа 5) направо и плоскости заднего колеса (и его следа 11) - налево, поэтому велосипед по колее поворачивает направо. При повороте соответствующих ручек в обратную сторону велосипед поворачивает налево.
Вариант 3 кинематической связи узла поворота велосипеда показан на фиг. 4 (сплошные линии) и фиг. 5.
По этому варианту кинематические звенья передачи усилия поворота от ручек узла поворота представляют собой конструктивное объединение в подузел - трехзвенную передачу усилия поворота одновременно от каждой указанной ручки 1.1 и 1.2 на соответствующие шестерни 2.1 и 2.2, закрепленные каждая соосно на соответствующей ручке, эти шестерни связаны зацеплением непосредственно с шестерней 9. Последняя закреплена на первичном вале 10 поворота плоскости заднего колеса и, соответственно, передает усилие поворота далее на опору заднего колеса велосипеда.
В варианте 3 (фиг. 4, 5 - сплошные линии) работа узла поворота велосипеда и способ осуществляются следующим образом.
В процессе движения велосипеда велосипедист, например, для поворота направо, поворачивает правую 1.1 и/или левую 1.2 ручку узла поворота велосипеда вокруг ее оси таким же образом, как и в варианте 1. Усилие, переданное от шестерен 2.1 и 2.2 на шестерню 9 и, соответственно, на вал 10, поворачивает плоскость заднего колеса велосипеда налево (см. на фиг. 6 след 11 заднего колеса и стрелку, указывающую поворот его плоскости), при этом велосипед поворачивает направо.
Таким образом, благодаря соответствующему повороту ручек 1.1, 1.2, осуществляется поворот плоскости заднего колеса (и его следа 11) налево, поэтому велосипед по колее поворачивает направо. При повороте соответствующих ручек в обратную сторону велосипед поворачивает налево.
Вариант 4 кинематической связи узла поворота велосипеда показан на той же фиг. 4 сплошными и пунктирными линиями совместно.
Он соответствует повороту велосипеда путем поворота плоскостей переднего и заднего колес одновременно, при этом конструкция узла поворота соответствует варианту ii (см. существенные признаки и формулу изобретения).
По этому варианту кинематические звенья передачи усилия поворота от ручек узла поворота представляют собой конструктивное объединение в подузел - трехзвенную передачу усилия поворота одновременно от каждой указанной ручки 1.1 и 1.2 на соответствующие шестерни 2.1 и 2.2, закрепленные каждая соосно на соответствующей ручке, эти шестерни связаны зацеплением непосредственно с шестерней 9. Последняя закреплена на первичном вале поворота 10 плоскости заднего колеса и, соответственно, передает усилие поворота далее на опору заднего колеса велосипеда. При этом также от указанного вала 10 его поворот через другую кинематическую пару передается на первичный вал поворота 14 плоскости переднего колеса и, соответственно, далее на опору переднего колеса. Эта другая пара показана пунктиром, она образует зацепление шестерни 12, закрепленной соосно на вале 10, и шестерни 13, закрепленной соосно на вале 14, который также показан пунктиром.
В варианте 4 (фиг. 4 - сплошные и пунктирные линии совместно) работа узла поворота велосипеда и способ осуществляются следующим образом.
В процессе движения велосипеда велосипедист, например, для поворота направо, поворачивает левую 1.1 и/или правую 1.2 ручку узла поворота велосипеда вокруг ее оси таким же образом, как и в варианте 1. Усилие, переданное на вал 10, поворачивает плоскость заднего колеса велосипеда налево (см. след 11 заднего колеса на фиг. 9). Одновременно шестерня 12, закрепленная на этом вале, своим зацеплением с шестерней 13, обеспечивает поворот вала 14, который поворачивает плоскость переднего колеса велосипеда направо (см. след 5 переднего колеса на той же фиг. 9). Стрелками показан поворот следа каждого колеса при повороте велосипеда направо.
Таким образом, благодаря соответствующему повороту ручек 1.1, 1.2, осуществляется одновременный поворот плоскости переднего колеса (и его следа 5) направо и плоскости заднего колеса (и его следа 11) - налево, поэтому велосипед по колее поворачивает направо. При повороте соответствующих ручек в обратную сторону велосипед поворачивает налево.
Вариант 5 кинематической связи узла поворота велосипеда показан на фиг. 7 и 8. Он соответствует повороту велосипеда путем поворота плоскостей переднего и заднего колес одновременно, при этом конструкция узла поворота соответствует варианту iii (см. существенные признаки и формулу изобретения).
По этому варианту кинематические звенья передачи усилия поворота от ручек узла поворота представляют собой конструктивное объединение в сложный подузел: первая трехзвенная передача шестерен 2.1-3-2.2 передает усилие поворота одновременно от каждой ручки, непосредственной кинематической связью на первичный вал 4 поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса, и параллельно вторая трехзвенная передача шестерен 2.1-9-2.2 передает усилие поворота одновременно от каждой той же ручки, непосредственной кинематической связью на первичный вал 10 поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса.
В данном варианте (iii) валы 4 и 10 поворота плоскостей переднего и заднего колес не связаны между собой прямой связью, как кинематическая пара, а связаны опосредованно, через кинематическую связь каждого вала с ручками узла поворота велосипеда.
В примере на фиг. 7, 8 работа узла поворота велосипеда и способ осуществляются следующим образом.
В процессе движения велосипеда велосипедист, например, для поворота направо, поворачивает левую 1.1 и/или правую 1.2 ручку узла поворота велосипеда вокруг ее оси таким же образом, как и в варианте 1. Усилие, переданное от трехзвенной передачи шестерен 2.1-3-2.2 на вал 4, поворачивает плоскость переднего колеса велосипеда направо (см. след 5 переднего колеса на фиг. 9). Одновременно усилие, переданное от трехзвенной передачи шестерен 2.1-9-2.2 на вал 10, поворачивает плоскость заднего колеса велосипеда налево (см. след 11 заднего колеса на той же фиг. 9). Стрелками показан поворот следа каждого колеса при повороте велосипеда направо.
Таким образом, благодаря соответствующему повороту ручек 1.1, 1.2, осуществляется одновременный поворот плоскости переднего колеса (и его следа 5) направо и плоскости заднего колеса (и его следа 11) - налево, поэтому велосипед по колее поворачивает направо. При повороте соответствующих ручек в обратную сторону велосипед поворачивает налево.
На фиг. 10 показана кинематическая схема варианта 6 узла поворота велосипеда с использованием промежуточного кинематического звена (винтовой передачи) для передачи усилия от ручек на вал поворота плоскости колеса велосипеда.
Здесь ручки: левая - 1.3 и правая - 1.4 имеют форму цилиндрических трубок. Ручки имеют возможность поворота каждая вокруг своей оси, совпадающей с осью своего цилиндра, при этом все оси лежат на одной общей прямой. Ручки 1.3 и 1.4 связаны зацеплением, соответственно, с правой 15.1 и левой 15.2 ветвями винтовой передачи, имеющей возможность поступательного движения влево или вправо (от одной ручки к другой). Ветви 15.1 и 15.2 винтовой передачи имеют взаимно противоположное направление винта, прямая линия их смещения лежит на той же общей прямой, что и оси ручек. Указанные ветви соединены ползуном 16, установленном в неподвижных направляющих, которые обеспечивают его смещение вдоль указанной общей линии при повороте ручек в пределах заданного диапазона. В центре ползуна 16 закреплен шток 17, конец которого взаимодействует с кривошипом 18, при этом ось поворота кривошипа (на фиг. 10 эта ось пересекается с плоскостью рисунка в точке О) совпадает с осью первичного вала поворота плоскости того колеса, на которое передается усилие поворота ручек 1.3 и 1.4 и которое обеспечивает поворот велосипеда.
На чертеже заштрихованы неподвижные несущие элементы узла поворота и рамы велосипеда. Стрелками показано направление поступательного движения ползуна 16 и предельные границы поворота кривошипа 18.
Поворот ручек 1.3 и 1.4 в противоположные стороны с помощью винтовых передач 15.1 и 15.2 преобразуется в поступательное движение ползуна, шток 17 которого преобразует это движение в поворот вала поворота с осью О. Этот вал поворачивает плоскость управляемого колеса велосипеда в соответствующую сторону.

Группа изобретений относится к способу управления поворотом велосипеда и к узлу поворота велосипеда. Способ передачи усилия для управления поворотом велосипеда заключается в том, что обеспечивается поворот путем поворота плоскости переднего или заднего колеса или обоих колес велосипеда одновременно. Узел поворота велосипеда реализует указанный выше способ. Обеспечивается повышение безопасности, снижение нагрузки, повышение удобства велосипедиста. 2 н. и 6 з.п. ф-лы, 10 ил.
1. Способ передачи усилия для управления поворотом велосипеда, заключающийся в том, что в процессе движения велосипеда велосипедист поворачивает левую и/или правую ручку узла поворота велосипеда вокруг оси ее поворота, указанные две ручки имеют раздельные оси поворота и закреплены по обеим сторонам рамы велосипеда, при этом для сохранения равновесия и устойчивости движения велосипедист смещает центр тяжести свой и/или велосипеда относительно опорных точек велосипеда с землей, при этом конструкция узла поворота велосипеда предусматривает кинематическую связь указанных ручек с поворачиваемыми опорами переднего, заднего или обоих колес через одно или более кинематическое звено, пару, в том числе, в виде левой и правой последовательности звеньев, передающих усилие поворота от соответствующей ручки на поворот плоскости переднего колеса и/или на поворот плоскости заднего колеса велосипеда, отличающийся тем, что, в случае поворота велосипеда путем поворота переднего или заднего колеса, велосипедист передает усилие поворота от каждой из указанных ручек на опору переднего или заднего колеса через кинематические звенья, которые объединены в подузел - трехзвенную передачу одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости переднего колеса, передающий это усилие далее непосредственно или через одно или более вторичных кинематических звеньев на опору переднего колеса, или на первичный вал поворота плоскости заднего колеса, передающий это усилие непосредственно или через одно или более вторичных кинематических звеньев на опору заднего колеса, или в случае поворота велосипеда путем поворота переднего и заднего колес одновременно:
- велосипедист передает усилие поворота от каждой из указанных ручек на оба колеса одновременно через кинематические звенья, которые объединены в подузел - трехзвенную передачу одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса, при этом также от этого вала его поворот через другую кинематическую пару передается на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса, или
- велосипедист передает усилие поворота от каждой из указанных ручек на оба колеса одновременно через кинематические звенья, которые объединены в подузел - трехзвенную передачу одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса, при этом также от этого вала его поворот через другую кинематическую пару передается на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса, или
- велосипедист передает усилие поворота от каждой из указанных ручек на оба колеса одновременно через кинематические звенья, которые объединены в сложный подузел: первая трехзвенная передача передает усилие поворота одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса, и параллельно вторая трехзвенная передача передает усилие поворота одновременно от каждой той же ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса,
при этом каждая указанная ручка узла поворота или ее часть имеет такую форму, размеры и расположена так, чтобы велосипедист для передачи усилия поворота имел возможность ее обхватить и повернуть в нужную сторону вокруг оси поворота пальцами и/или кистью соответствующей руки, независимо от поворота или смещения своего торса.
2. Способ передачи усилия по п. 1, отличающийся тем, что ручки узла поворота велосипеда и их оси поворота расположены симметрично - по бокам относительно рамы велосипеда, в передней ее части.
3. Способ передачи усилия по п. 1, отличающийся тем, что каждую ручку выполняют в виде одинаковых трубки или стержня, имеющего цилиндрическую или близкую к цилиндрической форму, расположенных симметрично относительно вертикальной плоскости рамы велосипеда, с возможностью поворота каждой ручки вокруг оси ее поворота, совпадающей или параллельной оси цилиндра.
4. Способ передачи усилия по п. 1, отличающийся тем, что на каждой ручке закреплен или сама ручка представляет собой рычаг или курковый толкатель, преимущественно одинаковой формы, перпендикулярный или наклонный к оси поворота ручки, расположенные симметрично относительно вертикальной плоскости рамы велосипеда, с возможностью поворота рычага или толкателя вместе с ручкой вокруг оси поворота ручки.
5. Способ передачи усилия, по п. 1, отличающийся тем, что для поворота велосипеда велосипедист поворачивает левую и правую ручки поворота в противоположные стороны.
6. Способ передачи усилия по п. 1, отличающийся тем, что передачу усилия от ручек узла поворота и зацепление соответствующих кинематических пар осуществляют с использованием одного или более зубчатых колес, преимущественно конических и/или цилиндрических, и закрепленных соосно на соответствующей ручке, соответствующей оси и/или на соответствующем вале.
7. Способ передачи усилия по п. 1, отличающийся тем, что, передачу усилия от ручек узла поворота и зацепление соответствующих кинематических пар осуществляют с использованием одного или более рычажных элементов, тросовых тяг, штифтовых передач и/или прорезных кулис, закрепленных соосно на соответствующей ручке, на соответствующей оси и/или на соответствующем вале.
8. Узел поворота велосипеда, содержащий левую и правую ручку поворота велосипеда, которые закреплены с обеих сторон на раме велосипеда с возможностью поворота каждой ручки раздельно вокруг собственной оси, неподвижной относительно рамы, а также закрепленный на раме велосипеда механизм передачи усилия поворота каждой или обеих ручек на опоры поворачиваемых переднего, заднего или обоих колес через кинематическую связь в виде одного или более кинематических звеньев, пар, в том числе, в виде левой и правой последовательности звеньев для передачи усилия поворота от соответствующей ручки на поворот плоскости переднего колеса и/или на поворот плоскости заднего колеса велосипеда, при этом сами ручки поворота и элементы механизма передачи усилия поворота ручек на поворот плоскости колес, в том числе, первичные элементы кинематических звеньев передачи поворота ручек на опоры колес, преимущественно могут быть размещены и закреплены на раме в передней части велосипеда в области привычного расположения кистей рук велосипедиста,
отличающийся тем, что в случае поворота велосипеда с помощью переднего или заднего колеса, кинематические звенья передачи усилия поворота от каждой из указанных ручек представляют собой конструктивное объединение в подузел - трехзвенную передачу одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса или на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса, или, в случае поворота велосипеда с помощью переднего и заднего колес одновременно:
- кинематические звенья передачи усилия поворота от каждой из указанных ручек представляют собой конструктивное объединение в подузел - трехзвенную передачу одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса, при этом также от этого вала его поворот через другую кинематическую пару передается на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса, или
- кинематические звенья передачи усилия поворота от каждой из указанных ручек представляют собой конструктивное объединение в подузел - трехзвенную передачу одновременно от каждой ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса, при этом также от этого вала его поворот через другую кинематическую пару передается на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса, или
- кинематические звенья передачи усилия поворота от каждой из указанных ручек представляют собой конструктивное объединение в сложный подузел: первая трехзвенная передача передает усилие поворота одновременно от каждой из ручек, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости переднего колеса и, соответственно, далее на опору переднего колеса, и параллельно вторая трехзвенная передача передает усилие поворота одновременно от каждой той же ручки, непосредственной кинематической связью или через промежуточное кинематическое звено, на первичный вал поворота плоскости заднего колеса и, соответственно, далее на опору заднего колеса,
при этом каждая указанная ручка узла поворота имеет такую форму, размеры и расположена так, чтобы велосипедист для передачи усилия поворота имел возможность ее обхватить и повернуть в нужную сторону вокруг ее оси пальцами и/или кистью соответствующей руки, независимо от поворота или смещения своего торса, при этом каждую ручку выполняют, преимущественно, в виде одинаковых трубки или стержня, имеющего цилиндрическую или близкую к цилиндрической форму, расположенных симметрично по бокам относительно вертикальной плоскости рамы велосипеда, с возможностью поворота каждой ручки вокруг оси ее поворота, совпадающей или параллельной оси цилиндра, и/или на каждой ручке закреплен или сама ручка представляет собой рычаг или курковый толкатель, преимущественно одинаковой формы, перпендикулярный или наклонный к оси поворота ручки, ручки при этом расположены симметрично относительно вертикальной плоскости рамы велосипеда, с возможностью поворота рычага или толкателя вместе с ручкой вокруг оси поворота ручки, при этом также для передачи усилия поворота левая и правая ручки узла поворота велосипеда должны иметь конструктивную возможность поворачиваться в противоположные стороны, причем передача усилия поворота ручек и зацепление кинематических пар может осуществляться преимущественно с использованием, в том числе, одного или более зубчатых колес, преимущественно конических и/или цилиндрических, и закрепленных соосно на соответствующей ручке, на соответствующей оси и/или на соответствующем вале, и/или с использованием одного или более рычажных элементов, тросовых тяг, штифтовых передач и/или прорезных кулис, закрепленных соосно на соответствующей ручке, на соответствующей оси и/или на соответствующем вале, причем внутри одного или более несущих трубчатых элементов рамы велосипеда имеется возможность разместить первичный(е) вал(ы) поворота плоскости переднего и/или заднего колес и/или элементы промежуточных или вторичных кинематических пар передачи усилия поворота на опоры колес велосипеда, при этом один или более элементов рамы, в том числе трубчатый элемент рамы, размещенный в нем вал поворота плоскости переднего и/или заднего колес и/или продольный элемент кинематической пары могут иметь по длине телескопическое соединение, с возможностью фиксации на заданной длине.
| Велосипед | 1988 |
|
SU1722935A1 |
| ВЕЛОСИПЕД С ЛИНЕЙНЫМ ПРИВОДОМ | 2008 |
|
RU2400391C2 |
| WO 2014118504 A1, 07.08.2014 | |||
| JPH 06144336 A, 24.05.1994. | |||

