Изобретение относится к транспортному машиностроению, к транспортной технике, преимущественно к колесному транспорту, в частности к приводу колес ходовой части транспортного средства (ТС) в движение.
Согласно словарю (/электронный ресурс/ https://dic.academic.ru/dic.nsf/polvtechnic/10340/%D0%A5%D0%9E%D0%94%D0%9E %D0%92%D0%90%D0%AF): Ходовая часть - это совокупность элементов шасси, образующих тележку транспортной машины. Напр., в X. ч. автомобиля входят: рама, мосты, подвеска и колеса (с узлом и элементами управления их поворотом).
В статье Википедии: https://ru.wikipedia.org/wiki/ Ходовая часть транспортного средства, представлено описание ходовой части различных ТС.
Рассмотрим различные категории и типы ТС, а также типы приводов ТС в движение. В соответствии с
а. http://оттс.pyc/otts_karegorii_transportnih_sredstv.html Классификация ТС по категориям, и
б. http://.pyc/otts tipi-i-kategorii-ts.html Подразделение ТС на типы и модификации,
различают следующие колесные ТС (и шасси):
• мотоциклы, мопеды, мотовелосипеды, мокики, трициклы, квадрициклы (L1-L7)
• легковые автомобили (M1)
• автобусы и троллейбусы (М2, М3)
• грузовые автомобили и их шасси (N1, N2, N3)
• транспортные средства повышенной проходимости (NIG, N2G, N3G, M1G, M2G, M3G)
• прицепы и полуприцепы (О1, О2, О3, О4)
• специальные и специализированные ТС
• шасси транспортных средств.
В общем случае в перечень наземных ТС входят рельсовые ТС.
В соответствии с Википедией (см. Ось (техника) https://ru.wikipedia.org/wiki/):
колесо вместе с валом/осью является несущим элементом ходовой части транспортного средства, через которое ТС опирается на поверхность, по которой движется.
На примере автомобилей рассмотрим.
(http://systemsauto.ru/pendant/car_wheel.html Колесо автомобиля)
Колесо, являясь элементом ходовой части, связывает автомобиль с дорогой. С помощью колес осуществляется движение, передаются вертикальные нагрузки от автомобиля, воспринимаются удары и колебания от дороги. Кроме того, ведущие колеса создают при контакте с дорогой тяговое усилие, управляемые колеса обеспечивают маневрирование.
(http://bibliotekar.ru/enc-Tehnika/34.htm Валы и оси машин)
Ось, как правило, имеет опоры с обоих концов. Если же ось закреплена только с одного конца, а на другом установлено колесо - ее называют полуосью. На таких полуосях
установлены передние колеса автомобиля... Валы не только поддерживают
вращающиеся детали (как оси), но и передают вращающие усилия от одной части механизма другой (см. Механизм).
В соответствии с терминологией (https://www.autocitroen.ru/company/news/tipy-privodov-avtomobiley/ Основные типы приводов автомобиля), под приводом ТС (в данном случае, автомобиля) подразумевается способ передачи сил вращения на колеса ТС (вид силовой связи колес с двигателем или с ведущим валом ТС). При этом все машины подразделяются на 3 типа: заднеприводные, переднеприводные и с полным приводом.
В заднеприводном автомобиле крутящий момент от двигателя передается на заднюю ось, в переднеприводном - крутящий момент передается на переднюю ось, а в полноприводном - крутящий момент передается на обе оси: переднюю и заднюю, то есть на все колеса машины. Обычно, в любой схеме привода, крутящий момент на соосные колеса передается одинаковым образом (параллельно).
При этом к колесам ТС предъявляются стандартные нормативные требования. Например, к колесам автомобилей и к колесам ТС, использующим автомобильные колеса, предъявляются требования к колесам в соответствии с ГОСТ 33544-2015 (https://docs.cntd.ru/document/1200135004 Межгосударственный стандарт. Автомобильные транспортные средства. Колеса дисковые. Технические требования и методы испытаний), введенным в действие 01.04.2017 г.
При этом надо учесть, что в общем случае передние и/или задние колеса ТС участвуют в управлении поворотом ТС при его движении. Поэтому в ряде случаев схемы привода ТС в движение увязываются со схемами управления поворотом ТС.
Поэтому рассмотрим здесь, так называемые, полноуправляемые ТС.
Примером исследования полноуправляемого ТС является статья: Маркина, А.А., Чепкасов, С.Н., & Бережная, М.А. (2019). Исследование кинематики полноуправляемого автомобиля. Вестн. СибАДИ, 16(5 (69)), 580-591. https://doi.org/10.26518/2071 -7296-2019-5-580-591.
В исследовании различаются два типа полноуправляемых -полноповоротных схем:
с положительным или с отрицательным управлением поворотом ТС.
При положительной схеме поворота и передние, и задние колеса ТС при управлении поворачиваются в одну сторону - вправо или влево, фактически получается управляемый занос ТС вправо или влево.
При отрицательной полноповоротной схеме управления передние колеса поворачиваются в одну сторону, а задние в противоположную, при этом ТС поворачивает в сторону поворота передних колес. При этом практически вдвое уменьшается радиус поворота и повышается маневренность ТС.
Кроме автотранспортных средств изобретение может быть использовано в мускульном ТС (в том числе, электрифицированном), в мототехнике (в том числе, в мотоциклах), на авиационных шасси и в средствах индивидуальной мобильности - СИМ. (См.: Средства индивидуальной мобильности: https://zakon.ru/blog/2020/4/21/sredstva_individualnoj_mobilnosti_i_drugie_izmeneniya _v_pdd) а также в ТС с электрическим, пневматическим или гидравлическим приводом.
Ряд современных ТС используют мотор-колеса:
а. https://enqineerinq-ru.livejournal.com/323209.html Мотор-колесо с ДВС,
б. https://ru.wikipedia.org/wiki/ Мотор-колесо. Википедия. Мотор-колесо.
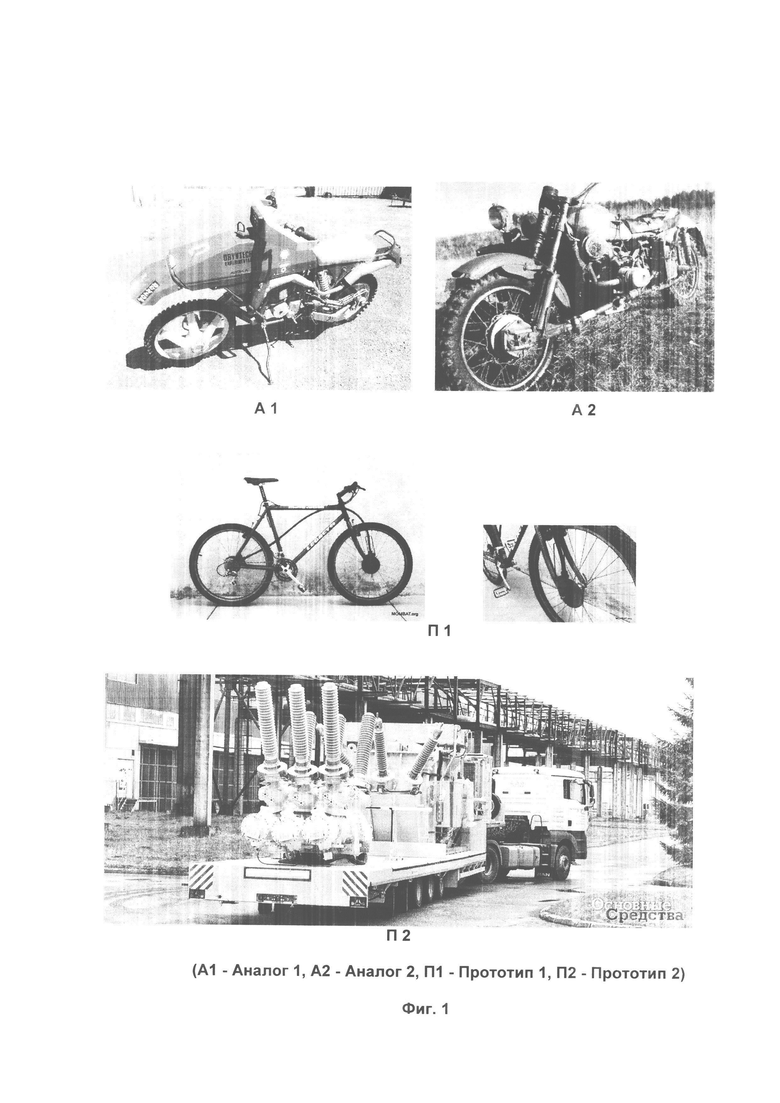
/Аналог-А1/ Известен мотоцикл (2-х колесный, одноколейный) с полным приводом и рулевым управлением на оба колеса (полным управлением): https://zen.yandex.ru/media/id/5e6e91af5f50cb6af854daa1/drvsdale-drvvtech-2x2x2-gidravlicheskoe-chudo-s-polnym-privodom-i-rulevym-upravleniem-na-oba-kolesa-5ebeb06372423a6de38c3a9e
В мотоцикле приводом обоих колес в движение является гидравлический насос высокого давления (310 бар), который воздействует на два гидравлических мотора в ступицах колес. При этом каждое колесо закреплено на своей несущей стойке консольно, стойки с колесами развернуты антисимметрично одна к другой. С учетом высокого давления все магистрали - стальные трубы. Дисковые тормоза отсутствуют, но гидравлический мотор действует как регенеративная тормозная система. При помощи редукционных клапанов крутящий момент может регулироваться для каждого колеса параллельно. Кроме того, с помощью гидравлического насоса осуществляется управление двумя рулевыми плунжерами колес.
Недостатки: сложность в настройке и эксплуатации гидравлической системы, использующей масло. Из-за высокой точности изготовления узлов и деталей: крыльчаток клапанов, наличия множества звеньев силовой передачи, зависимость от состава масла - значительно повышены ее стоимость, требования к высокой надежности системы передачи усилия на колеса (использование прочных стальных труб). При нарушении системы и поступлении масла под колеса возможно проскальзывание колес, аварийная ситуация, пожарная опасность. Для ремонта системы требуются высококвалифицированные специалисты.
/А2/ Известен полноприводной мотоцикл Урал (https://ok.ru/usamodelki/topic/68557132551636). Мотоцикл имеет две схемы опорных колес: обычная (2-х колесная одноколейная) схема и схема с коляской (3-х колесная двухколейная схема). Привод на заднее (ведущее) колесо мотоцикла известный - механический с редуктором. Колесо мотоколяски -свободное, без привода. В соответствии с фотографией из источника, силовой привод на переднее колесо мотоцикла осуществляется от заднего колеса с помощью карданного вала, колена которого соединены карданным соединением с помощью шарниров (4 шарнира Гука), а также зубчатого зацепления концов этого вала с валами/осями колес. Управление поворотом мотоцикла осуществляется путем поворота оси одного переднего колеса, при этом указанный кардан-вал изгибается («переламывается» в шарнирах) в соответствии с направлением поворота руля, при этом заднее ведущее колесо сидит на неповоротном валу.
Недостатками мотоцикла являются высокие потери мощности при передаче усилия через кардан-вал и зубчатые шестерни связи с колесами. Причем при повороте руля от кардан-вала требуется обеспечить дополнительную его длину, а при его повороте в обратную сторону требуется уменьшение длины кардан-вала, это вносит дополнительные ограничения в использование аналога. Все указанные конструктивные особенности требуют высокую дополнительную мощность двигателя. Особенно такие потери проявляются при значительных углах поворота колен кардан-вала - например, при повороте оси одного колена относительно другого на угол более 15°-20°, значительно повышается концентрация напряжений в шарнирах. Соответственно возрастает вероятность их поломки. Снижается нормативный срок эксплуатации кардан-вала, возрастают расходы на ремонт. При этом снижается надежность системы. При снятии колен кардан-вала для ремонта или при замене требуется специальное оборудование.
/Прототип - П1/ В качестве прототипа изобретения предложен Велосипед -MOMBAT/Bikes (http://mombatbicycles.com/MOMBAT/Bikes/1991_Leqacy2x2.html Велосипеды - MOMBAT/Bikes -1991).
В данном велосипеде с обычным цепным приводом на заднее колесо и с управлением поворота при повороте рулем передней вилки велосипеда, дополнительно от заднего (ведущего) колеса установлен силовой привод на переднее колесо. Указанный привод представляет собой гибкий трос с осевым вращением (гибкий вал), на обоих торцах которого, на оси его вращения, жестко закреплены конические зубчатые шестерни, зацепляющиеся с ответными шестернями соответствующих колес, при этом указанные шестерни выполнены в виде больших открытых нейлоновых конических шестерен.
Передняя вилка имеет ширину 135 мм, такую же, как традиционная ширина для заднего колеса, так чтобы это колесо было конструктивно обеспечено прикреплением (зацеплением шестерен) к приводу в движение от заднего колеса. Такая конструкция привода в виде гибкого троса, который имеет возможность вращаться в неподвижной оболочке, обеспечивает решение проблемы взаимного «запаздывания» колес велосипеда при повороте. При неисправностях или при загрязнении система дополнительного привода демонтируется на месте.
К недостаткам прототипа относятся значительные потери мощности в приводе при передаче усилия через две пары шестерен, усложнение и удорожание конструкции за счет изготовления указанных нейлоновых шестерен, быстрый их износ. Также потери вносит точечное закрепление полумягкой гибкой обоймы- оболочки на раме велосипеда (из-за концентрации напряжений между гибким валом и точками закрепления оболочки). Ввиду конструктивно открытого зацепления указанных шестерен, возможно их загрязнение, увеличение потерь передачи усилия или поломка системы данной передачи. Конструкция гибкого привода, с фиксированным продольным закреплением гибкого вала в обойме, не может обеспечить поворот заднего колеса велосипеда по полноуправляемой схеме поворота, по сравнению с заявляемым изобретением.
Гибкий вал широко используется в технике для передачи вращения. (https://pro-techinfo.ru/konstruktsii-detalej-mashin-onlain/detali-peredach/valy-i-osi-2/gibkie-valy-silovyh-peredach/ Гибкие валы силовых передач; а также: ГОСТ 13225-80. Гибкие валы силовых передач).
/П2/ Другим прототипом является модульное ТС, информация с сайта: https://os1.ru/article/7862-modulnye-transportnye-sredstva - Модульные транспортные средства.
Известное модульное ТС - это самоходное и/или несамоходное ТС с ходовой частью, образованной неподвижным соединением одинаковых колесных модулей в одну или более платформ. Выпускаются значительное число модификаций модулей. Например, имеется базовая конструкция - платформа с числом осевых линий от 2 до 8. Модули стыкуются как продольно, так и поперечно.
Различаются модули по конструктивным параметрам, функциональным характеристикам, габаритам. Имеется проект самоходного модуля Powermax. Это машина тройного действия, позволяющая использовать ее как несамоходный модуль в составе автопоезда со скоростями до 80 км/ч, как толкающий тягач в составе модульного транспортного средства и как одиночное самоходное транспортное средство.
Имеются модули, у которых в ступицы колес приводной осевой линии встроены высокомоментные гидромоторы, которые и приводят колеса в движение. Тяговое усилие, которое развивает одна осевая линия, больше, чем может обеспечить балластный тягач с колесной формулой 8x4 или 8x6.
Ранее использовали механическую подвеску (механический поворот осей с помощью червячной передачи и специального гидромотора), сейчас в ряде современных модификаций перешли на полностью гидравлическую подвеску, - каждая ось может двигаться независимо как вверх-вниз, так и вправо-влево.
К примеру, модули с механической системой рулевого управления с углом поворота колес вправо-влево на 55-60° развернуться не могут. Поэтому были разработаны самоходные модули с электронным управлением осевых групп. Электронное управление реализовано за счет зубчатой передачи, которая приводится гидромотором. Новое поколение шириной 2,4 м - PST/ESE. Есть подмодификации - облегченные THP/SL-L с нагрузкой 27 тонн на осевую линию по сравнению с 45 тоннами у стандартного 3-метрового исполнения. Есть исполнение, шириной 3,6 м, исполнение с увеличенным межосевым расстоянием.
Важный аспект - это совместимость по стыковочным узлам. Модели THP/SL и PST/SL соединяются друг с другом - и с электронным управлением, и с механическим. Могут стыковаться разные модели и их производные и комбинироваться друг с другом. Имеется система ограничения угла поворота осей с электронным управлением до угла поворота механических осей.
Недостатки /П2/. Основными недостатками представленных модульных ТС является их высокая сложность (высокая точность и сложность изготовления современных узлов и деталей ТС, в том числе, электронных, а также дистанционное управление системой, чтобы обеспечить согласованность работы узлов), большая масса и высокая стоимость самих ТС и их эксплуатации.
Эти недостатки вытекают из других задач, по сравнению с задачами изобретения, которые решают известные модульные ТС: перевозка сверхмассивных и крупногабаритных грузов как по существующим транспортным путям, так и, при определенных условиях, по бездорожью. В случае нестандартной ситуации или аварии, Фирма-перевозчик и/или заказчик несут многомиллионные убытки в валюте, они стараются повысить надежность перевозки (добавляется высокая точность и сложность аппаратуры контроля и управления перевозками), что также повышает стоимость перевозки грузов, сложность контроля или ремонта техники (как в пути, так и в стационаре), при этом требуется аварийная бригада высококвалифицированных специалистов.
Отсутствуют сравнительно простые разработки подобных систем для универсальной вездеходной техники и/или других ТС, различных категорий и типов.
Задачей изобретения является осуществление способа работы гибкого привода вращения колес ходовой части транспортных средств (ТС) и создание таких ТС с гибким приводом, при движении которых силовая передача вращения от одного ведущего колеса ко второму (ведомому) колесу или между парой ведущих колес ТС осуществляется с использованием гибкого вала. При этом обеспечивается полный привод колес, который способствует полноуправляемому повороту ТС. При этом реализуется собственно полноповоротная схема управления колесами, соединенными через гибкий вал.
Рассматриваются преимущественно схемы полноприводных, а также полноповоротных ТС, а именно, с отрицательной схемой поворота.
/Разъяснение термина «отрицательная схема поворота ТС…» представлено на стр.3 данного изобретения (статья: Маркина А. А. и др., 2019. Исследование кинематики полноуправляемого автомобиля…)./
В изобретении представлены ТС разного вида с различным числом опорных колес, начиная от двух и более колес: вело-, мото- ТС и подобные (два колеса -последовательно - одноколейные), двух колейные (в том числе, с симметричным расположением колес, скомплектованных в парные группы, с четным общим числом колес - 4, 6, 8..., при этом в группе колеса могут быть закреплены вместе жестко на одном валу, в том числе - одно колесо или более, в зависимости от расчетной нагрузки на вал (ось), или на тележку колес), двух-трех колейные: мото-ТС, автомобили, квадро-, квадри-циклы, самоходные моторизованные ТС, а также тележки, полуприцепы и прицепы.
Достигается следующий технический результат.
Гибкий привод по изобретению характеризуется соединением торцов гибкого вала к двум колесам указанной ходовой части так, чтобы ось вращения каждого торца гибкого вала совпадала с осью вращения соответствующего колеса, при этом необходимо чтобы указанный торец гибкого вала был жестко соединен с указанным колесом либо в проекции оси вращения колеса, в том числе на валу этого колеса (торец в торец), либо проволочными нитями развитого торца указанного вала к боковой стороне колеса в точках окружности, концентрической относительно оси вращения, причем эти точки и нити проволоки торца расположены симметрично относительно оси вращения указанного колеса. Это позволяет осуществить полный привод колес с наименьшими потерями передаваемого момента силы и затратами, по сравнению с аналогами (сравнить с приводом через шестерни, карданные валы и/или через гидропривод), с использованием единственной детали прямого соединения колес через гибкий вал.
При этом у колес с дорогой вместо одной, появляются две точки приложения силы тяги двигателя: через переднее и через заднее колеса.
При этом указанный гибкий привод может быть установлен между двумя ведущими колесами, каждое из которых имеет собственный привод (например, в виде мотор-колеса).
Преимущество гибкого вала проявляется также в том, что он имеет две степени свободы (вращения и продольного перемещения внутри S-образной гильзы-обоймы). Известные схемы гибкого вала имеют закрепление его в обойме (по меньшей мере в двух фиксированных точках) с ограничениями, препятствующими указанному продольному смещению вала, что добавляет потери крутящего момента, также в известных схемах отсутствует возможность управления поворотом осей колес, связанных через гибкий вал.
При использовании указанного гибкого привода (в том числе, на оба ведущих колеса) значительно снижается эффект проскальзывания переднего или заднего колеса на бездорожье по грязи, так как приводной гибкий вал выравнивает нагрузку на передние и задние колеса и мягко синхронизирует их вращение.
Использование указанного гибкого привода способствует полноуправляемому режиму работы системы управления поворотом ТС, так как при повороте оси первого колеса, смещение гибкого вала вдоль S-образной трубчатой гильзы способствует повороту второго колеса 2 относительно первого по отрицательной схеме управления поворотом. Это позволяет узлу управления поворотом работать по отрицательной схеме полного поворота с меньшей нагрузкой, обеспечивая поворот переднего и заднего колес в разные стороны на малые требуемые углы. Это повышает чувствительность системы управления поворотом ТС, снижает износ покрышек колес, практически вдвое повышает маневренность ТС. Поворот обоих колес в полноповоротной схеме обеспечивает улучшение сцепления колес ТС с дорогой, особенно, на наклонных участках дороги.
Простую схему гибкого привода по изобретению удобно использовать в ТС разного вида от СИМ, вело-, мото-техники до автомобилей различных категорий с двигателями ДВС, газовыми, электрическими и с мускульной тягой, в том числе, повышенной проходимости. Технический эффект особенно проявляется, если в качестве источника тяги используются моторколеса. Изобретение также может быть использовано в рельсовом транспорте, в авиационных шасси и в водном транспорте.
Построение ТС по модульному принципу, путем соединения одинаковых модулей с представленным гибким приводом в одну или более линеек или платформ позволяет перевозить крупногабаритные и сверхтяжелые грузы в сложных дорожных условиях и по бездорожью. При этом имеется возможность комплектовать ТС из модулей с заданными характеристиками по требованию заказчика.
В итоге, благодаря использованию группы изобретений - сравнительно простых, удобных и недорогих: способа, гибкого привода колес ходовой части ТС и транспортных средств разного вида на его основе, представленных в изобретении, значительно снижаются затраты на изготовление ТС, его эксплуатацию и ремонт, расширяются технические возможности ТС (движение по дорогам и по бездорожью, вариативность модификаций ТС).
Указанный технический результат достигается в способе размещения и работы гибкого привода и управления поворотом полноприводного транспортного средства - ТС, в составе которого имеются ходовая часть, колеса ходовой части, узел управления поворотом ТС и гибкий вал гибкого привода, через который передается усилие вращения между указанными колесами,
причем гибкий вал размещают внутри закрепленной обоймы с возможностью его вращения, гибкий вал обычно является тросовым изделием, в соответствии с ГОСТ 13225-80 (Гибкие валы силовых передач),
способ отличается от известных тем, что
в указанном приводе торцы гибкого вала жестко присоединяют к двум колесам указанной ходовой части так, чтобы ось вращения каждого торца гибкого вала совпадала с осью вращения соответствующего колеса,
при этом указанный торец гибкого вала соединяют по оси вращения колеса с самим колесом, с валом этого колеса - торец в торец, или проволочными нитями развитого или расплетенного торца гибкого вала к боковой стороне колеса: например, к ступице, диску или ободу, в центрально-симметричных точках окружности, концентрической относительно оси вращения колеса.
/Здесь и далее: схема соединения торца гибкого вала к колесу определяется конструкцией колеса, техническими требованиями заказчика и, по сути, не влияет на работу гибкого привода при передаче крутящего момента от одного колеса к другому./
При этом в составе колес ходовой части ТС используют как одиночные колеса на оси/валу, так и группы по 2-4 колеса, жестко прикрепленные друг к другу и/или к валу, на котором сидят, при этом количество колес в группе определяется нагрузкой на вал (на ось).
/Далее в существенных признаках и в формуле изобретения термином «колесо» обозначено как одно колесо, так и группа из нескольких одинаковых колес, соединенных друг с другом и/или с валом, на котором они сидят,
Обоснованием такого подхода является то, что указанная группа колес выполняет те же функции, что и единичное колесо, за исключением того, что несет большую нагрузку/.
Причем указанные торцы или нити торца гибкого вала прикрепляют к указанным колесам с тех сторон, которые обеспечивают возможность вращения колес в одну сторону: вперед или назад,
причем обойму, внутри которой размещен гибкий вал, выполняют в виде S-образной трубчатой гильзы,
которую прикрепляют средней частью к неподвижным элементам шасси посередине между осей и на одном уровне с осями колес указанного привода,
при этом гибкий вал имеет возможность продольного перемещения вдоль S-образной образующей указанной гильзы,
при этом из двух колес, соединяемых гибким валом, могут быть ведущими одно или оба колеса,
таким образом, гибкий привод выполняют полноприводным, что позволяет управлять поворотом обеих осей указанных колес ТС,
при этом собственно узел управления поворотом ТС выполняют по отрицательной схеме полного поворота, содержащей элементы: кулисно-рычажные, механической передачи, гидравлической или пневматической передачи, электрические или электронные компоненты или их возможную комбинацию, в соответствии с расчетами и требованиями Технического задания.
В частности, в способе торец или нити торца гибкого вала скрепляют с колесом непосредственно или через соединительную, переходную или обжимную муфту.
В частности, в способе S-образную гильзу прикрепляют к элементам шасси ТС жестким соединением.
В частности, в способе одно или оба колеса, соединяемые гибким валом, являются мотор-колесами с побудителем тяги: электрическим, на ДВС, газовым, пневматическим, гидравлическим, или комбинированным из указанных.
В частности, в способе узел управления поворотом ТС содержит механизм согласования поворота осей соответствующих колес.
Также представленный технический результат достигается в гибком приводе транспортного средства (ТС), содержащем колеса ходовой части, элементы узла управления поворотом ТС, при этом привод ТС выполнен с гибким валом, для передачи усилия вращения между указанными колесами, причем этот вал находится внутри закрепленной обоймы с возможностью вращения,
указанный гибкий привод отличается от известных тем, что
в нем торцы гибкого вала жестко соединены с двумя колесам указанной ходовой части так, чтобы ось вращения каждого торца гибкого вала совпадала с осью вращения соответствующего колеса,
при этом указанный торец гибкого вала соединен по оси вращения колеса с самим колесом, с валом этого колеса - торец в торец, или проволочными нитями развитого или расплетенного торца гибкого вала к боковой стороне колеса, например, к ступице, диску или ободу, в центрально-симметричных точках окружности, концентрической относительно оси вращения колеса,
при этом указанные торцы или нити торца гибкого вала скреплены с указанными колесами с тех сторон, которые обеспечивают возможность вращения колес в одну сторону: вперед или назад,
причем обойма, внутри которой находится гибкий вал, имеет вид S-образной трубчатой гильзы, которая прикреплена, своей средней частью к неподвижным элементам шасси посередине между осями и на одном уровне с осями указанных колес,
при этом гибкий вал имеет возможность продольного перемещения вдоль, S-образной образующей указанной гильзы,
при этом из двух колес, соединенных гибким валом, могут быть ведущими одно или оба колеса,
таким образом, гибкий привод является полноприводным, что обеспечивает возможность управления поворотом обеих осей указанных колес ТС,
при этом собственно узел управления поворотом ТС выполнен по отрицательной схеме полного поворота, содержащей элементы: кулисно-рычажные, механической передачи, гидравлической или пневматической передачи, электрические или электронные компоненты или их возможную комбинацию, в соответствии с расчетами и требованиями Технического задания.
В частности, в указанном приводе торец или нити торца гибкого вала скреплены с колесом непосредственно или через переходную, соединительную или обжимную муфту.
В частности, в указанном приводе S-образная гильза жестко прикреплена к элементам шасси ТС.
В частности, в указанном приводе одно или оба колеса, соединенные гибким валом, являются мотор-колесами с побудителем тяги: электрическим, на ДВС, газовым, пневматическим, гидравлическим, или комбинированным из указанных.
Кроме того, указанный технический результат достигается в полноприводном транспортном средстве (ТС), содержащем ходовую часть, колеса ходовой части, узел управления поворотом ТС и гибкий привод с гибким валом, передающим усилие вращения от одного колеса к другому, причем гибкий вал находится в закрепленной обойме с возможностью вращения,
отличающемся от известных тем, что ходовая часть ТС выполнена в соответствии с вариантами i, ii1, ii2:
i - с расположением двух колес ходовой части ТС последовательно по одноколейной схеме, полный гибкий привод указанных колес и узел полного управления поворотом выполнены с теми же признаками, как у представленного выше в данном изобретении, гибкого привода с гибким валом;
ii1 - при расположении 4-х колес ходовой части ТС по двухколейной схеме -двух колес спереди и двух колес сзади - так, чтобы центры колес находились в вершинах прямоугольника, боковые стороны которого обозначали две колеи указанной схемы,
в гибком приводе один гибкий вал соединен одним своим торцом с первым левым колесом, а другим торцом со вторым левым колесом,
а второй гибкий вал соединен по симметричной геометрии относительно первого гибкого вала с плоскостью симметрии, совпадающей со срединной продольной плоскостью ходовой части ТС так, чтобы его один торец был соединен с первым правым колесом, а другой торец со вторым правым колесом,
при этом гибкий привод соединения каждого гибкого вала с соответствующими колесами выполнен с теми же признаками, как у, представленного выше в данном изобретении, гибкого привода с гибким валом,
при этом узел управления поворотом ТС имеет механизм согласованного полного поворота всех колес ТС, связанных по указанной схеме гибкого привода, или без него,
ii2 - при расположении 4-х колес ходовой части ТС по двухколейной схеме - двух колес спереди и двух колес сзади - так, чтобы центры колес находились в вершинах прямоугольника, боковые стороны которого обозначали две колеи указанной схемы,
в гибком приводе один гибкий вал соединен одним своим торцом с первым левым колесом, а другим торцом со вторым правым колесом,
а второй гибкий вал соединен по симметричной геометрии относительно первого гибкого вала с плоскостью симметрии, совпадающей со срединной продольной плоскостью ходовой части ТС так, чтобы его один торец был соединен с первым правым колесом, а другой торец со вторым левым колесом,
при этом гибкий привод соединения каждого гибкого вала с соответствующими колесами выполнен с теми же признаками, как у представленного выше в данном изобретении гибкого привода с гибким валом,
при этом узел управления поворотом ТС выполнен по отрицательной схеме полного поворота, с механизмом согласования поворота осей соответствующих колес или без него.
В частности, в указанном ТС одно или оба колеса, соединенные гибким валом, являются мотор-колесами с побудителем тяги: электрическим, на ДВС, газовым, пневматическим, гидравлическим, или комбинированным из указанных.
В частности, указанное ТС является автомобилем, квадро-, квадри-циклом, самоходной моторизованной тележкой, мотоциклом, велосипедом, самокатом, полуприцепом или прицепом.
В частности, в указанном ТС узел управления поворотом ТС составлен по отрицательной схеме поворота и содержит элементы механической передачи, в том числе, кулисно-рычажные, элементы гидравлической, пневматической передачи, с электрическими или электронными компонентами или их комбинацию.
Также представленный технический результат достигается в модульном транспортном средстве (ТС), содержащем ходовую часть, образованную соединением в платформу одинаковых модулей, имеющих колеса ходовой части с приводом вращения,
при этом узел управления поворотом ТС имеет схему и межмодульные элементы с возможностью полного управления для согласованного поворота колес всех модулей ТС,
отличающемся тем, что указанные модули соединены боковыми сторонами, каждый модуль имеет расположение 2-х колес ходовой части последовательно по одноколейной схеме или 4-х колес по двухколейной схеме,
причем привод колес в каждом модуле является гибким полноприводным, выполненным с теми же признаками, как у представленного выше в данном изобретении, гибкого привода с гибким валом.
В частности, в указанном модульном ТС платформа содержит, преимущественно от 2-х до 4-х модулей.
В частности, в указанном модульном ТС геометрия расположения элементов гибкого привода одного модуля относительно таких же элементов гибкого привода другого модуля может быть зеркально симметричной относительно линии соединения модулей или с симметрией параллельного переноса указанных элементов.
В частности, в указанном модульном ТС узел управления поворотом ТС составлен по отрицательной схеме поворота и содержит элементы механической передачи, в том числе, кулисно-рычажные, элементы гидравлической, пневматической передачи, с электрическими или электронными компонентами или их комбинацию.
В частности, в указанном модульном ТС одно или оба колеса, соединенные в модуле гибким валом, являются мотор-колесами с побудителем тяги: электрическим, на ДВС, газовым, пневматическим, гидравлическим, или комбинированным из указанных.
В частности, указанное модульное ТС является автомобилем, квадро-, квадри-циклом, самоходной моторизованной тележкой, полуприцепом или прицепом, с соответствующим исполнением ходовой части модулей ТС.
Предлагаемое изобретение поясняется следующими примерами.
На фиг. 1 (А1, А2, П1, П2) иллюстрируются примеры аналогов и прототипов данного изобретения из раздела «Уровень техники» под соответствующими обозначениями. А1 - мотоцикл с гидроприводом, А2 - мотоцикл «Урал» с приводом в виде коленчатого вала, П1 - велосипед с гибким валом, П2 -модульная платформа-полуприцеп для перевозки тяжелых и крупногабаритных грузов.
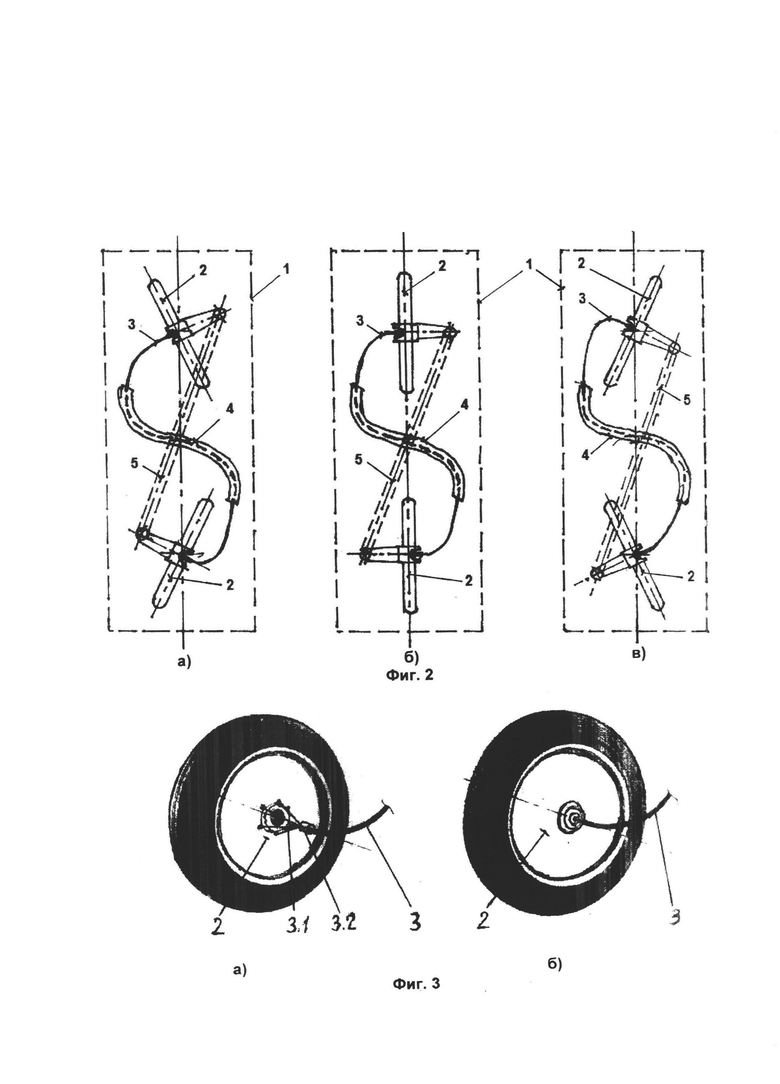
На фиг. 2 (а - в) схематически показано размещение гибкого привода и положение колес ходовой части 1-колейного 2х-колесного (полно-приводного, полноповоротного) транспортного средства - ТС, установленных для направления его движения налево, прямо и направо.
На фиг. 3 (а, б) показаны варианты присоединения торца указанного гибкого вала к колесу ходовой части ТС: - а) с помощью проволочных нитей развитого (расплетенного) указанного торца гибкого вала, - б) непосредственного прикрепления торца гибкого вала к торцу вала колеса.
На последующих чертежах показаны схемы, примеры и элементы полноприводных и полноповоротных ТС по изобретению. На указанных чертежах показаны элементы управления поворотом ТС схематически условно (упрощенно, чтобы не было потери ясности восприятия), при этом в составе ТС, в том числе - модульных, в узле управления поворотом имеются элементы согласования управления поворотом соответствующих осей колес ходовой части ТС.
При рассмотрении примеров не упоминается ряд узлов и составных частей ТС, таких, как тормозная система, система сигнализации или обеспечения смазки, кабина (салон), кузов ТС и др. Автор изобретения считает их не существенными для рассмотрения изобретения, а также считает, что в рассматриваемых ТС используются известные из указанных технические решения в соответствии с техническим заданием заказчика ТС.
Здесь приведены обозначения элементов ТС, существенных для представления данного изобретения:
1 - условная граница ходовой части ТС (показана пунктиром),
2 - колесо ходовой части в гибком приводе,
2.1 - колесо в приводе в виде мотор-колеса,
3 - гибкий тросовый вал, передающий вращение от одного колеса 2 или 2.1 к другому,
3.1 - проволочные нити развитого (расплетенного) торца гибкого вала 3,
3.2 - обжимная муфта в месте перехода от гибкого вала 3 к колесу 2,
4 - трубчатая S-образная гильза (обойма), внутри которой размещен гибкий вал 3, с возможностью вращения и продольного сдвига вдоль гильзы,
5 - узел управления поворотом ТС и его элементы, для согласованного поворота осей колес (на схемах элементы узла поворота условно показаны, как кулисно-рычажные, хотя могут быть другой конструкции: в соответствии с расчетами и требованиями Технического задания).
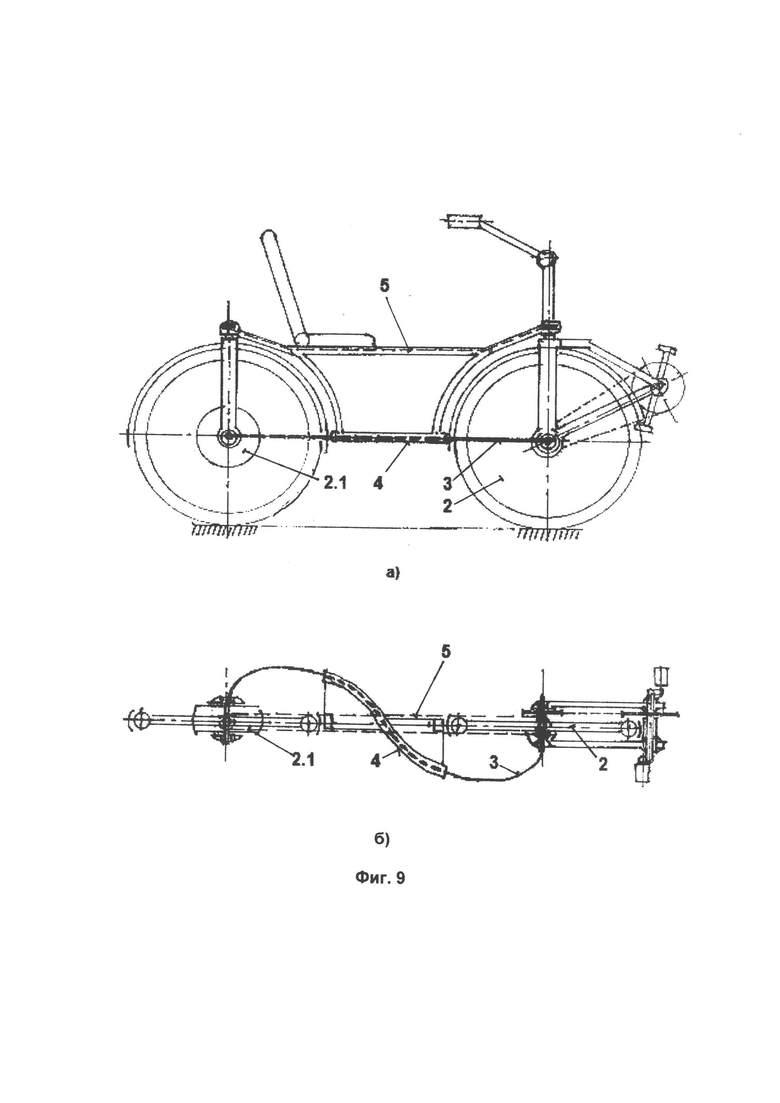
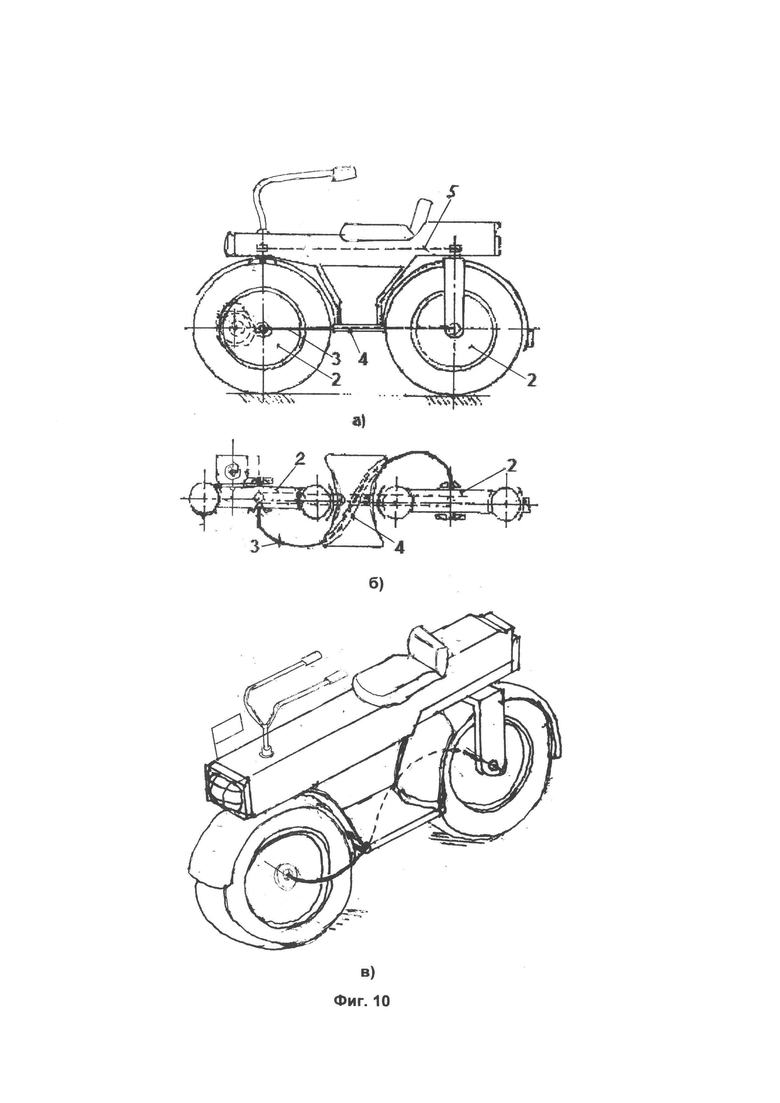
В примере, фиг. 2, показана ходовая часть 1 одноколейного транспортного средства (ТС) с двумя последовательно расположенными колесами 2. Таким ТС может быть мускульное ТС или со вспомогательным двигателем, в том числе, с мотор-колесами 2.1 (например, самокат - фиг. 8, велосипед - фиг. 9), а также моторизованное ТС с мотор-колесами 2.1 и колесами 2 (например, мотоцикл, мотороллер или мотовездеход, показанный на фиг. 10).
На фиг. 2 показаны три изображения ходовой части 1 ТС при разном положении колес 2 (а - поворот налево, б - ехать прямо, в - поворот направо). В схеме ТС условно принято передним верхнее колесо 2. При этом узел 5 управления поворотом ТС собран по отрицательной схеме полного поворота колес 2 и может содержать элементы механической передачи, в данном примере, кулисно-рычажные, или в других случаях, элементы гидравлической, пневматической передачи, с электрическими или электронными компонентами или их комбинацию.
Также ходовая часть 1 содержит гибкий привод в виде гибкого тросового вала 3, в соответствии с ГОСТ 13225-80 (Гибкие валы силовых передач), передающего вращение от одного колеса 2 к другому.
В указанном гибком приводе торцы гибкого вала 3 жестко соединены с двумя колесами 2 указанной ходовой части так, чтобы ось вращения каждого торца гибкого вала 3 совпадала с осью вращения соответствующего колеса 2, при этом указанный торец гибкого вала 3 соединен по оси вращения колеса 2, с валом этого колеса - торец в торец (см. фиг. 3б), хотя может быть присоединен к самому колесу в проекции оси вращения или в варианте, показанном на фиг. 3а, проволочными нитями 3.1 развитого или расплетенного торца гибкого вала 3 к боковой стороне колеса 2, в шести центрально-симметричных точках окружности, концентрической относительно оси его вращения. Например, соединение может быть к ступице, диску или ободу колеса 2. Схема соединения торца гибкого вала 3 к колесу 2 (или 2.1) определяется конструкцией этой части колеса, техническими требованиями заказчика и, по сути, не влияет на работу гибкого привода при передаче крутящего момента от одного колеса 2 к другому.
При этом из соединяемых гибким валом колес ведущими может быть одно колесо или оба (соответственно, побудитель тяги - двигатель - может быть внешним или совмещенным с колесом 2, 2.1).
При этом (как показано на этой и на других фигурах с примерами ТС) гибкий вал 3 размещен внутри S-образной трубчатой (обоймы) гильзы 4 с двумя степенями свободы движения: с возможностью вращения в гильзе и продольного сдвига вдоль гильзы 4. При этом обеспечиваются минимальные потери на передачу вращения гибкого вала 3 в гильзе от колеса к колесу. Саму гильзу 4 жестко прикрепляют к неподвижным элементам шасси (ходовой части 1) посередине между осями и на одном уровне с осями указанных колес 2.
Также важно, чтобы торцы гибкого вала 3 подходили к соответствующим колесам 2 с тех сторон, которые обеспечивали бы вращение этих колес в одну сторону: вперед или назад. На фиг. 2, так как торец вала 3 подсоединен к левому торцу вала (переднего) колеса 2, то второй торец вала 3 подсоединяется к правому торцу вала (заднего) колеса 2). Если оба колеса 2 гибкого привода ведущие, то обудителем тяги колеса/колес 2 (в виде мотор-колеса 2.1) может быть: электрический двигатель, ДВС, газовый, пневматический, гидравлический, или комбинированный из указанных.
Таким образом, рассматриваемый гибкий привод выполнен полноприводным, что позволяет управлять поворотом обеих осей указанных колес 2 ТС.
При этом узел 5 управления поворотом ТС выполнен по отрицательной схеме полного поворота, и в данном примере, с кулисно-рычажными элементами механизма согласованного поворота осей соответствующих колес 2.
Также в в соответствии с расчетами и требованиями Технического задания узел 5 управления поворотом ТС может содержать другие элементы: механической передачи, гидравлической или пневматической передачи, электрические или электронные компоненты или их возможную комбинацию, и кроме того, может иметь механизм согласования (совместного) поворота всех колес 2.
Работа гибкого привода ТС. Для примера, при начальном положении колес ТС по прямой колее (фиг. 2 б) и одном (переднем) ведущем колесе 2, побудитель тяги обеспечивает вращение этого колеса, за счет этого ТС движется, например, вперед. При этом торец гибкого вала 3 в приводе вращается вместе с торцом ведущего колеса 2, соответственно вращается весь гибкий вал 3 вместе с его вторым торцом, который жестко прикреплен к торцу вала другого (заднего) колеса 2. Ввиду жестокости скручивания гибкого вала на второе колесо 2 начинает действовать момент вращения гибкого вала 3, что побуждает его вращаться, независимо от сцепления с дорожным покрытием (в данном случае имеет место совместное действие на колесо 2 сил сцепления с дорогой и момента вращения гибкого вала). Вместо одной в колее, появляются две точки приложения тяги двигателя от каждого колеса 2. Это удобство позволяет более эффективно распределить усилие тяги и снизить потери двигателя на движение ТС, особенно для предотвращения проскальзывания колес 2 на мягких грунтах или в других сложных условиях (улучшается сцепление с дорогой на ее наклонных участках). Если в приводе используется соединение гибким валом 3 двух ведущих колес 2, имеющих собственные побудители тяги, то в качестве дополнительного механизма, обеспечивающего согласование скоростей вращения указанных колес 2, выступает гибкий вал привода указанных колес 2.
При повороте ТС, например, налево (фиг. 2 а), с помощью механизма управления поворотом ТС, переднее колесо 2 (ось колеса) поворачивает налево, а заднее - направо, в этот момент гибкий вал 3 смещается вдоль гильзы к заднему колесу 2. Это смещение происходит практически свободно, так как смещение участка гибкого вала 3 от переднего колеса 2 компенсируется смещением другого участка вала в том же направлении вдоль гильзы 4 к заднему колесу 2. Таким образом, при повороте оси первого колеса 2, смещение вала 3 вдоль гильзы 4 способствует повороту второго колеса 2 относительно первого, помогая реализовать отрицательную схему поворота ТС.
При этом механизм управления поворотом 5 обеспечивает соответствующий поворот заднего колеса 2 - направо. Обычно углы поворота колес равны, при этом примерно в 2 раза повышается чувствительность системы к углу поворота ТС. Это дает соответствующее снижение нагрузки на передачу усилия в системе управления поворотом. Одновременно повышается маневренность ТС.
Поворот ТС направо (фиг. 2 в) происходит по зеркально-симметричной геометрии с плоскостью симметрии, проходящей через центры обоих колес, в той же последовательности, что и на фиг. 2 а.
Вариантом ТС (не показано в чертежах), аналогичного показанному в данном примере, является одноколейное ТС, у которого в гибком приводе торец гибкого вала 3 подсоединен не к левому (как показано на фиг. 2), а к правому торцу вала (переднего) колеса 2, а второй торец вала 3 соответственно подсоединен к левому торцу вала (заднего) колеса 2.
Также вариантом ТС (также не показано в чертежах), аналогичного показанному в примере на фиг. 2, является двухколейное ТС (например, полноприводной, полноповоротный мотоцикл с коляской), в котором в одной колее расположена пара колес 2 самого мотоцикла с указанным гибким приводом - гибким валом 3, как в ходовой части 1 на фиг. 2, а во второй колее расположено третье колесо свободного вращения коляски мотоцикла. При этом ось третьего колеса расположена перпендикулярно к отрезку прямой, соединяющему центры осей колес 2, связанных через гибкий вал 3, а основание этого перпендикуляра лежит на указанном отрезке.
Работа указанных ТС происходит аналогично работе ТС на фиг. 2.
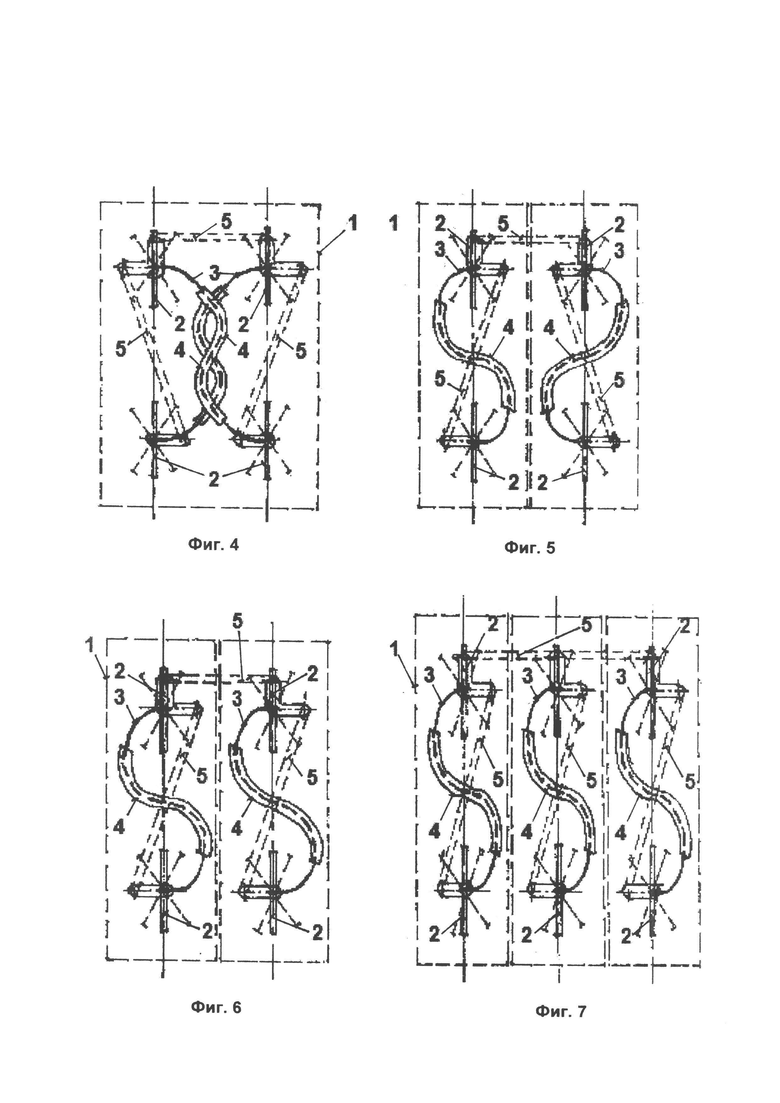
Еще одной группой примеров является двухколейное ТС, варианты которого показаны на фиг. 4 и 5.
В примере (фиг. 4) при расположении 4-х колес ходовой части 1 ТС по двухколейной схеме - двух колес 2 спереди и двух колес 2 сзади - так, чтобы центры колес находились в вершинах прямоугольника, боковые стороны которого обозначали две колеи указанной схемы,
- один гибкий вал 3 соединен одним своим торцом с торцом вала первого левого колеса 2, и другим торцом с торцом вала второго правого колеса 2,
- а второй гибкий вал 3 соединен по симметричной геометрии относительно первого вала 3 с плоскостью симметрии, совпадающей с срединной продольной плоскостью ходовой части 1 ТС так, чтобы его один торец был соединен с торцом вала первого правого колеса 2, и второй торец был соединен с торцом вала второго левого колеса 2. При этом в приводе, для каждого гибкого вала 3 с соответствующими колесами 2, их схема соединения и работа осуществляется также, как у гибкого привода с гибким валом 3, представленного на фиг. 2, с соответствующим режимом движения двух пар колес. При этом в узле управления поворотом ТС показан рычажный механизм 5 согласованного полного поворота всех связанных колес 2 ТС.
В примере (фиг. 5) при расположении 4-х колес ходовой части 1 ТС по двухколейной схеме - двух колес 2 спереди и двух колес 2 сзади - так, чтобы центры колес находились в вершинах прямоугольника, боковые стороны которого обозначали две колеи указанной схемы,
- один гибкий вал 3 соединен одним своим торцом с торцом вала первого левого колеса 2, и другим торцом с торцом вала второго левого колеса 2,
- а второй гибкий вал 3 соединен по симметричной геометрии относительно первого гибкого вала с плоскостью симметрии, совпадающей с срединной продольной плоскостью ходовой части 1 ТС так, чтобы его один торец был соединен с торцом вала первого правого колеса 2, а второй торец был соединен с торцом вала второго правого колеса 2.
При этом в приводе, для каждого гибкого вала 3 с соответствующими колесами 2, их схема соединения и работа осуществляется также, как у гибкого привода с гибким валом 3, представленного на фиг. 2, с параллельным режимом движения двух пар колес. При этом в узле управления поворотом ТС показан кулисно-рычажный механизм 5 согласованного полного поворота всех связанных колес 2 ТС.
Ту же фиг. 5 можно рассматривать как пример модульного ТС, состоящего из двухмодульной платформы (модули разделены двойной пунктирной линией по продольной средней линии платформы), при этом модули содержат одинаковые гибкие приводы колес ходовой части 1 по схеме присоединения гибкого вала 3 к колесам с зеркальной симметрией.
На фиг. 6 показан пример модульного ТС, состоящего из двухмодульной платформы (показано разделение модулей двойной пунктирной линией по продольной средней линии платформы), при этом модули содержат одинаковые гибкие приводы колес ходовой части 1 по схеме присоединения гибкого вала 3 к колесам 2 с симметрией параллельного переноса.
На фиг. 7 показан пример модульного ТС, состоящего из трехмодульной платформы (показано разделение модулей двумя двойными пунктирными линиями, которые параллельны продольной средней линии платформы), при этом модули содержат одинаковые гибкие приводы колес ходовой части 1 по схеме присоединения гибкого вала 3 к колесам 2 с симметрией параллельного переноса.
При этом на фиг. 4-7 в приводе, для каждого гибкого вала 3 с соответствующими колесами 2, их схема соединения и работа осуществляется также, как у гибкого привода с гибким валом 3, представленного на фиг.2, с параллельным режимом движения соответствующих колес 2. При этом в узле управления поворотом ТС показан (условно в качестве примера) кулисно-рычажный механизм 5 согласованного полного поворота всех связанных колес 2 ТС.
В указанных вариантах модульных ТС, когда суммарная нагрузка ТС превышает нагрузочную способность его одиночных колес, на один вал (ось) может быть жестко установлено (насажено) несколько одинаковых колес 2: группа в 2-4 колеса. В расчетной модели нагрузки на колеса и по своим функциям группа из нескольких колес, жестко установленных на один вал, эквивалентна одному колесу. Поэтому в указанных вариантах исполнения ТС под колесом 2 подразумевается возможная указанная группа из нескольких колес.
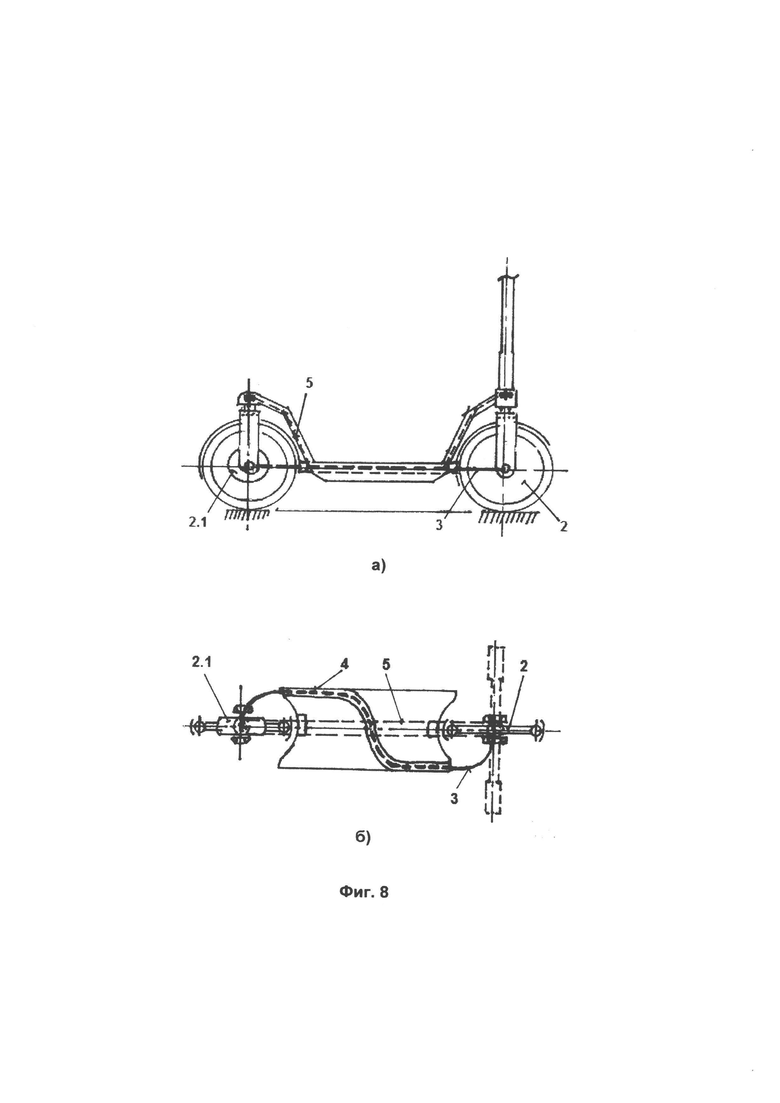
На фиг. 8 показан схематизированный чертеж (а) вид сбоку и б) сверху - в сечении осей колес) полно-приводного полноповоротного дорожного электросамоката с предложенным гибким приводом с гибким валом 3, с передним мотор-колесом 2.1. Гильза 4 для размещения гибкого вала 3 встроена в площадку для ног (деку) самоката. Гибкий вал 3 подходит к каждому колесу 2 своими торцами по их оси вращения, каждый торец жестко соединен с колесом 2 непосредственно в проекции оси вращения на это колесо. Узел управления поворотом 5 электросамоката - тросовый.
На фиг. 9 показан схематизированный чертеж (вид: а) сбоку и б) сверху - в сечении осей колес) полно-приводного полноповоротного туристического велосипеда, дополненного электротягой от заднего электро-моторколеса 2.1, с предложенным гибким приводом. Гильза 4 для размещения гибкого вала 3 встроена в площадку для ног (деку) велосипеда. Гибкий вал 3 подходит к каждому колесу 2 своими торцами по их оси вращения, каждый торец жестко соединен с колесом 2 непосредственно в проекции оси вращения на это колесо. Узел управления поворотом 5 велосипеда - тросовый.
На фиг. 10 показан схематизированный чертеж (вид: а) сбоку, б) сверху - в сечении осей колес, и в) в аксонометрии) полно-приводного полноповоротного мотовездехода с предложенным гибким приводом. В данном ТС каждое колесо 2 закреплено на своей несущей стойке консольно, стойки с колесами развернуты антисимметрично одна к другой. Двигатель вездехода навесной, установлен на стойке переднего колеса 2 и связан с колесом редуктором. Гильза 4 для размещения гибкого вала 3 встроена в площадку для ног (деку) вездехода. Гибкий вал 3 подходит к каждому колесу 2 своими торцами по их оси вращения, каждый торец жестко соединен с колесом 2 непосредственно в проекции оси вращения на это колесо. Узел управления поворотом 5 мотовездехода может быть любого типа, в данном случае - кулисно-рычажный (условно показан пунктиром вдоль средней линии под сиденьем мотовездехода).
Группа изобретений относится к области машиностроения, в частности к способам размещения и работы гибкого привода и управления поворотом полноприводного транспортного средства. В приводе торцы гибкого вала жестко присоединяют к двум колесам указанной ходовой части так, чтобы ось вращения каждого торца гибкого вала совпадала с осью вращения соответствующего колеса. Торец гибкого вала соединяют по оси вращения колеса с самим колесом. Обойму, внутри которой размещен гибкий вал, выполняют в виде S-образной трубчатой гильзы. Гибкий привод транспортного средства выполнен с гибким валом для передачи усилия вращения от одного колеса к другому. Полноприводное транспортное средство содержит ходовую часть, колеса ходовой части, узел управления поворотом ТС и гибкий привод с гибким валом, передающим усилие вращения от одного колеса к другому, причем гибкий вал находится в закрепленной обойме с возможностью вращения. Модульное транспортное средство содержит ходовую часть, образованную соединением в платформу одинаковых модулей, имеющих колеса ходовой части с приводом их вращения. Модули соединены боковыми сторонами. Каждый модуль имеет расположение 2-х колес ходовой части последовательно по одноколейной схеме или 4-х колес по двухколейной схеме. Достигается облегчение и упрощение конструкции привода. 4 н. и 15 з.п. ф-лы, 10 ил.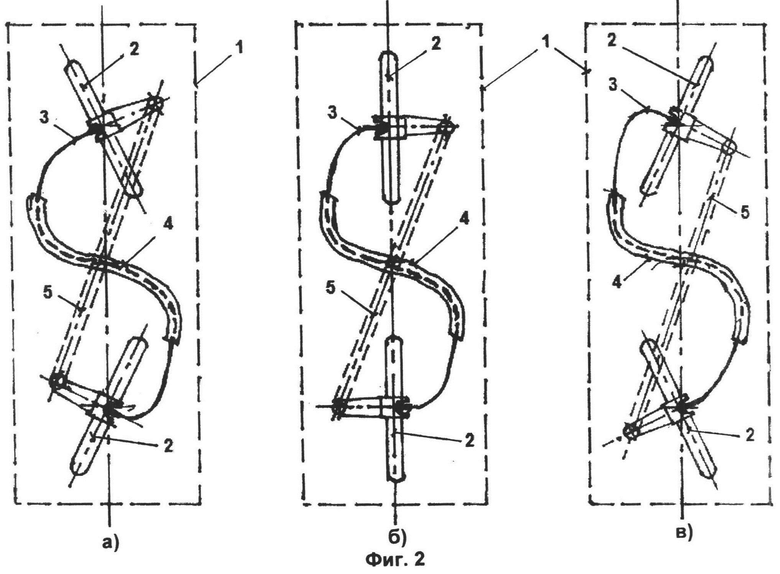
1. Способ размещения и работы гибкого привода и управления поворотом полноприводного транспортного средства (ТС),
в составе которого имеются: ходовая часть, колеса ходовой части, узел управления поворотом ТС и гибкий вал гибкого привода, через который передают усилие вращения между указанными колесами, причем гибкий вал размещают внутри закрепленной обоймы с возможностью его вращения,
отличающийся тем, что
в указанном приводе торцы гибкого вала жестко присоединяют к двум колесам указанной ходовой части так, чтобы ось вращения каждого торца гибкого вала совпадала с осью вращения соответствующего колеса,
при этом указанный торец гибкого вала соединяют по оси вращения колеса с самим колесом, с валом этого колеса - торец в торец или проволочными нитями развитого или расплетенного торца гибкого вала к боковой стороне колеса в центрально-симметричных точках окружности, концентрической относительно оси вращения колеса,
при этом в составе колес ходовой части ТС используют как одиночные колеса на оси/валу, так и группы по 2-4 колеса, жестко прикрепленные друг к другу и/или к валу, на котором сидят, при этом количество колес в группе определяется нагрузкой на вал/на ось,
во всех пунктах формулы термином «колесо» обозначено как одно колесо, так и группа из нескольких одинаковых колес, жестко соединенных друг с другом и/или с валом, на котором они сидят,
причем указанные торцы или нити торца гибкого вала прикрепляют к указанным колесам с тех сторон, которые обеспечивают возможность вращения колес в одну сторону: вперед или назад,
причем обойму, внутри которой размещен гибкий вал, выполняют в виде S-образной трубчатой гильзы, которую прикрепляют средней частью к неподвижным элементам шасси посередине между осей и на одном уровне с осями колес указанного привода,
при этом гибкий вал имеет возможность продольного перемещения вдоль S-образной образующей указанной гильзы,
при этом из двух колес, соединяемых гибким валом, могут быть ведущими одно или оба колеса,
таким образом, гибкий привод выполняют полноприводным, что позволяет управлять поворотом обеих осей указанных колес ТС,
при этом собственно узел управления поворотом ТС выполняют по отрицательной схеме полного поворота, содержащей элементы: кулисно-рычажные, механической передачи, гидравлической или пневматической передачи, электрические или электронные компоненты или их возможную комбинацию.
2. Способ по п. 1, отличающийся тем, что торец или нити торца гибкого вала скрепляют с колесом непосредственно или через соединительную, переходную или обжимную муфту.
3. Способ по п. 1, отличающийся тем, что S-образную гильзу прикрепляют к элементам шасси ТС жестким соединением.
4. Способ по п. 1, отличающийся тем, что одно или оба колеса, соединяемые гибким валом, являются мотор-колесами с побудителем тяги: электрическим, на ДВС, газовым, пневматическим, гидравлическим или комбинированным из указанных.
5. Способ по п.1, отличающийся тем, что узел управления поворотом ТС имеет механизм согласованного поворота осей соответствующих колес.
6. Гибкий привод транспортного средства (ТС), содержащий колеса ходовой части, элементы узла управления поворотом ТС, при этом привод ТС выполнен с гибким валом, для передачи усилия вращения от одного колеса к другому, причем этот вал находится внутри закрепленной обоймы с возможностью вращения,
отличающийся тем, что
в приводе торцы гибкого вала жестко соединены с двумя колесами указанной ходовой части так, чтобы ось вращения каждого торца гибкого вала совпадала с осью вращения соответствующего колеса,
при этом указанный торец гибкого вала соединен по оси вращения колеса с самим колесом, с валом этого колеса - торец в торец или проволочными нитями развитого или расплетенного торца гибкого вала к боковой стороне колеса в центрально-симметричных точках окружности, концентрической относительно оси вращения колеса,
при этом указанные торцы или нити торца гибкого вала скреплены с указанными колесами с тех сторон, которые обеспечивают возможность вращения колес в одну сторону: вперед или назад,
причем обойма, внутри которой находится гибкий вал, имеет вид S-образной трубчатой гильзы, которая прикреплена, своей средней частью к неподвижным элементам шасси посередине между осями и на одном уровне с осями указанных колес,
при этом гибкий вал имеет возможность продольного перемещения вдоль S-образной образующей указанной гильзы,
при этом из двух колес, соединенных гибким валом, могут быть ведущими одно или оба колеса,
таким образом, гибкий привод является полноприводным, что обеспечивает возможность управления поворотом обеих осей указанных колес ТС,
при этом собственно узел управления поворотом ТС выполнен по отрицательной схеме полного поворота, содержащей элементы: кулисно-рычажные, механической передачи, гидравлической или пневматической передачи, электрические или электронные компоненты или их возможную комбинацию.
7. Привод по п. 6, отличающийся тем, что торец или нити торца гибкого вала скреплены с колесом непосредственно или через переходную, соединительную или обжимную муфту.
8. Привод по п. 6, отличающийся тем, что S-образная гильза жестко прикреплена к элементам шасси ТС.
9. Привод по п. 6, отличающийся тем, что одно или оба колеса, соединенные гибким валом, являются мотор-колесами с побудителем тяги: электрическим, на ДВС, газовым, пневматическим, гидравлическим или комбинированным из указанных.
10. Полноприводное транспортное средство (ТС), содержащее ходовую часть, колеса ходовой части, узел управления поворотом ТС и гибкий привод с гибким валом, передающим усилие вращения от одного колеса к другому, причем гибкий вал находится в закрепленной обойме с возможностью вращения,
отличающееся тем, что ходовая часть ТС выполнена в соответствии с вариантами i, ii1, ii2:
i - при расположении двух колес ходовой части ТС последовательно по одноколейной схеме полный гибкий привод указанных колес с узлом полного управления поворотом выполнен по п.6 данной формулы изобретения;
ii1 - при расположении 4-х колес ходовой части ТС по двухколейной схеме так, чтобы центры колес находились в вершинах прямоугольника, боковые стороны которого обозначали две колеи указанной схемы,
в гибком приводе один гибкий вал соединен одним своим торцом с первым левым колесом, а другим торцом со вторым левым колесом,
а второй гибкий вал соединен по симметричной геометрии относительно первого гибкого вала с плоскостью симметрии, совпадающей со срединной продольной плоскостью ходовой части ТС так, чтобы его один торец был соединен с первым правым колесом, а другой торец со вторым правым колесом,
при этом гибкий привод соединения каждого гибкого вала с соответствующими колесами выполнен по п.6 данной формулы изобретения,
при этом узел управления поворотом ТС имеет механизм согласованного полного поворота всех колес ТС, связанных по указанной схеме гибкого привода или без него;
ii2 - при расположении 4-х колес ходовой части ТС по двухколейной схеме так, чтобы центры колес находились в вершинах прямоугольника, боковые стороны которого обозначают две колеи указанной схемы,
в гибком приводе один гибкий вал соединен одним своим торцом с первым левым колесом, а другим торцом со вторым правым колесом,
а второй гибкий вал соединен по симметричной геометрии относительно первого гибкого вала с плоскостью симметрии, совпадающей со срединной продольной плоскостью ходовой части ТС так, чтобы его один торец был соединен с первым правым колесом, а другой торец со вторым левым колесом,
при этом гибкий привод соединения каждого гибкого вала с соответствующими колесами выполнен по п.6 данной формулы изобретения,
при этом узел управления поворотом ТС выполнен по отрицательной схеме полного поворота и имеет механизм согласования поворота всех колес ТС, связанных по указанным схемам гибкого привода или без него.
11. ТС по п. 10, отличающееся тем, что одно или оба колеса, соединенные гибким валом, являются мотор-колесами с побудителем тяги: электрическим, на ДВС, газовым, пневматическим, гидравлическим или комбинированным из указанных.
12. ТС по п. 10, отличающееся тем, что указанное ТС является автомобилем, квадро-, квадрициклом, самоходной моторизованной тележкой, мотоциклом, велосипедом, самокатом, полуприцепом или прицепом.
13. ТС по п. 10, отличающееся тем, что узел управления поворотом ТС содержит элементы механической передачи, в том числе кулисно-рычажные, элементы гидравлической, пневматической передачи, с электрическими или электронными компонентами или их комбинацию.
14. Модульное транспортное средство (ТС), содержащее ходовую часть, образованную соединением в платформу одинаковых модулей, имеющих колеса ходовой части с приводом их вращения,
при этом узел управления поворотом ТС выполнен с возможностью отрицательного полного поворота и имеет межмодульные элементы для управления и согласованного поворота колес всех модулей ТС,
отличающееся тем, что указанные модули соединены боковыми сторонами, каждый модуль имеет расположение 2-х колес ходовой части последовательно по одноколейной схеме или 4-х колес по двухколейной схеме,
причем привод колес в каждом модуле является гибким полноприводным, выполненным по п.6 данной формулы изобретения, с узлом полного поворота указанных колес.
15. Модульное ТС по п. 14, отличающееся тем, что указанная платформа содержит преимущественно от 2-х до 4-х модулей.
16. Модульное ТС по п.14, отличающееся тем, что геометрия расположения элементов гибкого привода одного модуля относительно таких же элементов гибкого привода другого модуля может быть зеркально симметричной относительно линии соединения модулей или с симметрией параллельного переноса указанных элементов.
17. Модульное ТС по п. 14, отличающееся тем, что узел управления поворотом ТС составлен по отрицательной схеме поворота и содержит элементы механической передачи, в том числе кулисно-рычажные, элементы гидравлической, пневматической передачи, с электрическими или электронными компонентами или их комбинацию.
18. Модульное ТС по п. 14, отличающееся тем, что одно или оба колеса, соединенные в модуле гибким валом, являются мотор-колесами с побудителем тяги: электрическим, на ДВС, газовым, пневматическим, гидравлическим или комбинированным из указанных.
19. Модульное ТС по п. 14, отличающееся тем, что указанное ТС является автомобилем, квадро-, квадрициклом, самоходной моторизованной тележкой, полуприцепом или прицепом с соответствующим исполнением ходовой части модулей ТС.
| Модульная конструкция транспортного средства | 1987 |
|
SU1541103A1 |
| Транспортное средство с мускульным приводом | 1987 |
|
SU1532424A1 |
| US 5354243 A1, 11.10.1994. | |||

