Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и системе усовершенствованного автоматического управления одной или несколькими функциями транспортного средства. Изобретение рассчитано главным образом на транспортные средства с высокой степенью автоматизации управления различными функциями транспортных средств, в частности трансмиссией транспортного средства.
Изобретение также относится к компьютерной программе и компьютерному программному продукту для осуществления предложенного в изобретении способа.
Известный уровень техники
Во многих транспортных средствах различных типов все шире применяют автоматическое управление различными функциями. Примеры автоматически управляемых функций включают управление трансмиссией, иными словами, всю последовательность химического преобразования топлива в тяговое усилие одного или нескольких колес, систему торможения, систему кондиционирования воздуха и систему управления ходовой частью. В настоящее время в автоматическом режиме управляют множеством других функций.
Автоматическое управление различными функциями облегчает работу водителя, но в процессе автоматического управления функциями всегда существует вероятность осуществления неверного определения необходимых действий, например переключения на более высокую или низкую передачу, чем это фактически необходимо, или включение/отключение какой-либо функции. Тот факт, что автоматизация сопряжена с неверными определениями действий или включением/отключением функций, когда этого не требуется, конечно, нежелателен, поскольку в числе прочего может привести к неоптимальной работе транспортного средства и, что не менее важно, к недовольству водителя ввиду того, что автоматика не выполняет должным образом свои задачи.
Недовольство водителя может усугубляться тем фактом, что, например, грузовики часто передвигаются по одному маршруту и сам водитель запоминает и распознает те места, где автоматика обычно допускает ошибки.
Раскрытие изобретения
Таким образом, существует потребность в усовершенствовании или оптимизации автоматического управления одной или несколькими функциями транспортного средства. Исходным условием такой оптимизации является ее максимальная простота и надежность.
Названные задача и условие положены в основу настоящего изобретения, в котором предлагается способ усовершенствованного автоматического управления одной или несколькими функциями наземного транспортного средства, в котором:
- осуществляют автоматическое управление одной или несколькими функциями транспортного средства,
- определяют местоположение транспортного средства,
- сравнивают местоположение транспортного средства с одним или несколькими ранее запомненными местоположениями.
В соответствии с изобретением ранее запомненные местоположения являются местоположениями, в которых, как установлено, в предыдущих случаях система автоматического управления осуществила управляющее действие, которое вышло за заранее заданные допустимые пределы, и, если определенное местоположение транспортного средства соответствует одному из ранее запомненных местоположений, используют особые ранее запомненные данные управления, чтобы снизить вероятность того, что в процессе управления будут снова нарушены такие заранее заданные допустимые пределы.
Поскольку для того, чтобы использовать ранее запомненные данные управления, если местоположение транспортного средства соответствует одному из ранее запомненных местоположений, местоположение транспортного средства сравнивают с одним или несколькими ранее запомненными местоположениями, автоматическая система может "распознавать" места, в которых ранее была допущена ошибка, что, в свою очередь, позволяет гарантировать, что ошибка не будет повторена при очередном прохождении транспортного средства через такое место или, по меньшей мере, что будет снижена вероятность повторения ошибки, когда транспортное средство в очередной раз окажется в ранее известном местоположении, в котором системой автоматизации была допущена ошибка.
Изобретение также предусматривает соответствующую оценку автоматического управления одной или несколькими функциями транспортного средства и запоминание местоположений, в которых по данным оценки система автоматического управления осуществила измерение, которое вышло за заранее заданные допустимые пределы. Это означает, что систему постоянно обновляют данными о "новых" местоположениях, в которых могут потребоваться особые действия,
Определение координат транспортного средства осуществляют несколькими различными способами, используя источники внешних сигналов, например, систему глобального позиционирования (GPS) или иную систему спутниковой навигации. Однако определение координат транспортного средства также могут осуществлять при помощи вычислительных средств, которыми оснащено транспортное средство.
Изобретение также относится к системе, имеющей различные средства осуществления предложенного в изобретении способа.
Описание чертежей
Далее изобретение более подробно описано со ссылкой на приложенные чертежи, на которых:
на фиг.1 и фиг.2 схематически показаны последовательности рабочих режимов транспортного средства с автоматическим управлением коробкой передач,
на фиг.3 - упрощенная блок-схема последовательности осуществления способа, предложенного в изобретении, и
на фиг.4 - таблица функции согласно изобретению.
Варианты осуществления изобретения
В первую очередь изобретение описано применительно к транспортному средству с автоматическим управлением коробкой передач. Вместе с тем, следует признать, что предложенный в изобретении принцип применим практически к любой автоматически управляемой функции транспортного средства. Далее в описании также приведены примеры других функций.
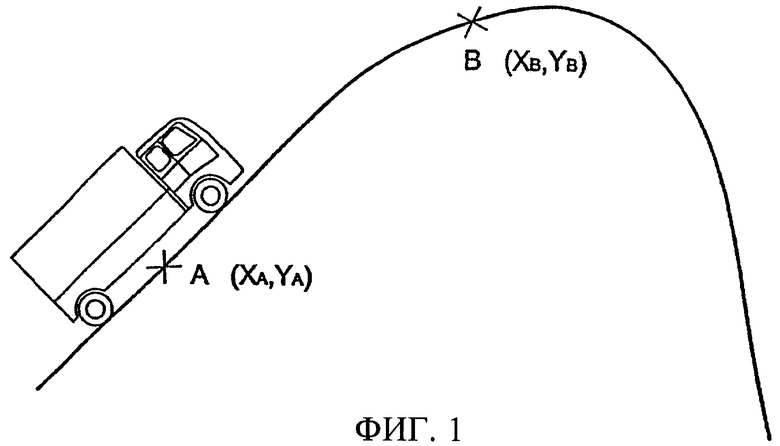
На фиг.1 схематически показано транспортное средство, а именно грузовик, двигающийся в гору. Он оснащен системой автоматического управления коробкой передач, которая в точке А уклона вверх переключает его коробку передач на определенную передачу, например 11-ю передачу, исходя из различных критериев, таких как, в частности, сопротивление поступательному движению, положение дроссельной заслонки и общая масса.
В точке В, расположенной после точки А, система автоматического управления коробкой передач определяет, что в ответ на действие нагрузки на трансмиссию (карданную передачу) транспортное средство должно перейти на 10-ю передачу. Однако после переключения на более низкую передачу транспортное средство только успевает достичь вершины подъема, что означает, что спустя короткое время после переключения с 11-й передачи на 10-ю система автоматического управления снова переключает коробку передач на 11-ю передачу. Таким образом, переход на более низкую передачу был излишним, что в числе прочего замечает водитель транспортного средства. Излишнее переключение коробки передач также отрицательно сказывается на экономии топлива и снижает среднюю скорость.
Чтобы избежать неверных действий при автоматическом управлении функциями, транспортное средство, например, оснащают базой картографических данных, что предотвращает неверные действия автоматики за счет использования картографических данных для управления транспортным средством. В случае применения такой системы нежелательный переход на более низкую передачу в приведенном выше примере был бы предотвращен, поскольку система считала бы указания высоты из базы данных и соответственно определила бы, что вскоре будет достигнута высшая точка подъема и переход на более низкую передачу является излишним.
Однако недостатком такого решения является недоступность баз картографических данных для всех географических районов. Кроме того, базы картографических данных с указаниями высот имеют некоторые недостатки, такие как, например, то, что они не содержат информации о других важных особенностях, например, в них не указаны места соединения или разделения полос движения, расположение перекрестков, светофоров, средств разгрузки движения, характерные световые и климатические условия и т.д. Таким образом, предпочтительным является решение, которое не зависит от баз картографических данных.
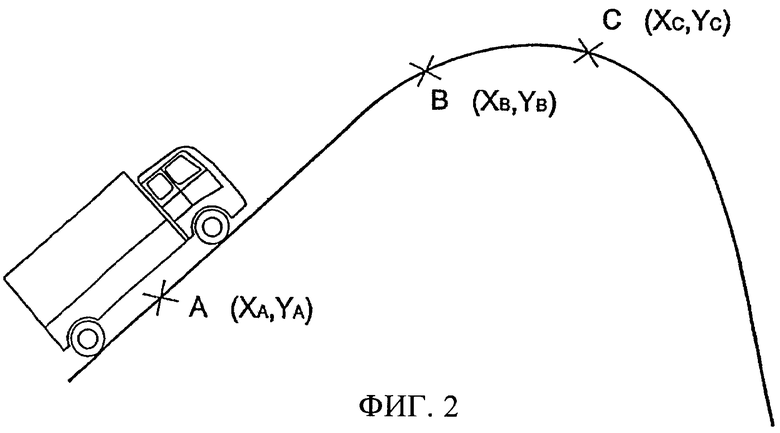
На фиг.2 показано транспортное средство, оснащенное предложенной в настоящем изобретении системой, действие которой описано далее со ссылкой на соответствующие операции, проиллюстрированные на фиг.3, на которой показана упрощенная схема последовательности осуществления способа.
Иными словами, на фиг.2 показана система, способная удовлетворить перечисленным выше требованиям, включая требование независимости от баз картографических данных.
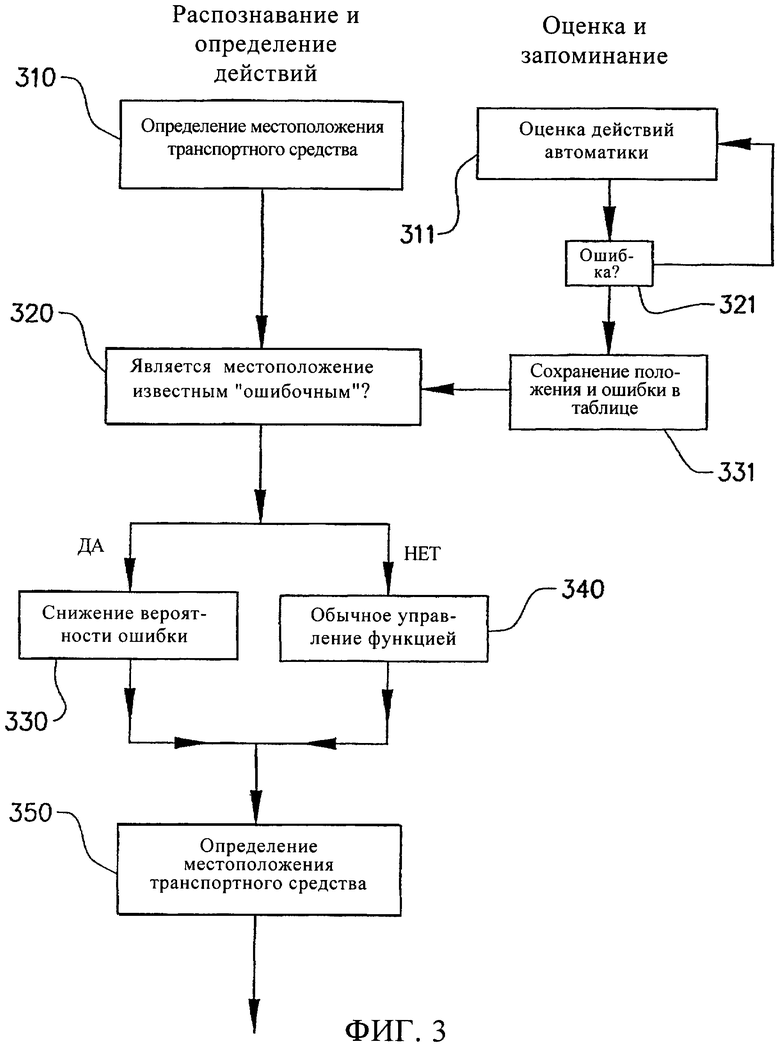
Транспортное средство имеет управляющее средство (непосредственно не показанное), служащее для автоматического управления одной или несколькими функциями транспортного средства, и дополнительно имеет устройство (не показанное) для определения на шаге 310 местоположения транспортного средства, иными словами, координат, которые обычно обозначают как х и у. Такая система, конечно, может включать координату высоты z, но она не является важной для изобретения и поэтому не описана более подробно.
Устройство или средство определения местоположения транспортного средства может быть реализовано множеством способов, известных специалистам в данной области техники, но может включать, например, средство спутниковой навигации, например, систему глобального позиционирования и устройства инерциальной навигации. Управляющее средство также может быть реализовано множеством различных способов, точные подробности которых не имеют особого значения для изобретения, но предпочтительно может представлять собой микропроцессор или вычислительное устройство иного типа.
В процессе движения транспортного средства соответствующее средство непрерывно определяет его местоположение, а установленная на транспортном средстве система включает средство, которое непрерывно или через фиксированные интервалы на шаге 320 осуществляет сравнение координат транспортного средства с ранее запомненными координатами, которые хранятся, например, в одной или нескольких таблицах.
Ранее запомненные местоположения являются местоположениями, в которых, как установлено, система автоматического управления ранее осуществила управляющее действие, вышедшее за заранее заданные допустимые пределы, иными словами, в которых система автоматического управления допустила просчет или ошибку.
Предложенная в изобретении система, которой оснащено транспортное средство, дополнительно включает средство, которое на шаге 320 осуществляет сравнение координат, и, если местоположение транспортного средства совпадает с одним из ранее запомненных местоположений, на шаге 330 принимает решение о том, должна ли система управления использовать особые ранее запомненные данные управления. Такие особые данные управления представляют собой данные о просчетах и ошибках, которые система автоматического управления допустила в предшествующих случаях при нахождении транспортного средства в соответствующем местоположении, что позволяет снизить и по возможности исключить вероятность того, что снова будет осуществлено управляющее действие, выходящее за такие заранее заданные допустимые пределы.
Таким образом, за счет предложенного в изобретении приспособления система автоматического управления распознает местоположения, в которых он ранее допускала просчеты или ошибки, что позволяет снизить вероятность повторения таких просчетов или ошибок в очередной раз, когда транспортное средство достигает того же местоположения.
Предложенная в изобретении система дополнительно включает средство, которое на шаге 311 осуществляет оценку автоматического управления одной или несколькими функциями транспортного средства. Данное средство позволяет на шаге 321 обнаруживать новые просчеты или ошибки в процессе движения транспортного средства и на шаге 331 сохранять в памяти их координаты с возможностью их включения в местоположения, которые сравнивает система с целью избежать просчетов или ошибок.
Сохраняют не просто координаты местоположений, в которых допущены просчеты или ошибки, но также данные о типе ошибки, чтобы облегчить системе автоматического управления принятие оптимального решения в очередной раз, когда транспортное средство достигнет того же местоположения.
Далее также со ссылкой на фиг.1 и фиг.2 описано, как предложенная в настоящем изобретении система усовершенствует автоматизацию управления: на шаге 321 средство оценки автоматического управления определило, что была допущена ошибка (переход на более низкую передачу в точке В) при первом прохождении транспортного средства через точку с соответствующими координатами, и на шаге 331 сохранило в памяти такие координаты хB, уB, а также данные для предотвращения ошибки. Поскольку в рассматриваемом примере ошибкой стал ненужный переход на более низкую передачу, предложенная в изобретении система сохранила в памяти данные управления, что означает, что транспортное средство скорректирует предельные временные рамки перехода на более низкую передачу по достижении в очередной раз соответствующих координат хB, уB.
Чтобы определить, что было совершено неверное действие, автоматическая система проверяет, не выходят ли определенные параметры за допустимые пределы. В случае переключения передач примером такого параметра является частота вращения двигателя или в качестве альтернативы расстояние, на протяжении которого необходимо удерживать выбранную передачу, иными словами, расстояние от точки В до вершины подъема. Если такое расстояние меньше определенной заранее заданной предельной величины, система автоматического управления может посчитать переход на более низкую передачу ненужным и, таким образом, внести в память координаты точки В.
После того как на шаге 320 описанные выше компоненты системы определят, что транспортное средство снова оказалось в точке В, система автоматического управления на шаге 330 скорректирует обычно действующие предельные временные рамки перехода на более низкую передачу. Поскольку невозможно быть уверенным в том, что условия, которые действовали во время ненужного перехода на более низкую передачу, будут также действовать, когда транспортное средство окажется в том же местоположении, нецелесообразно вводить полный запрет на автоматический переход на более низкую передачу (транспортное средство может быть более тяжело нагруженным, поверхность дороги может быть скользкой, может дуть сильный встречный ветер и т.д.). Иными словами, в точке В обычное автоматическое управления коробкой передач блокируют и применяют другие правила, которые в данном случае являются "более жесткими", однако не вводя при этом полный запрет на переход на более низкую передачу. Если в качестве параметров, которые применяет система автоматического управления коробкой передач, выбрана, например, частота вращения двигателя транспортного средства в сочетании с конкретным временным пределом, время, например, достижения двигателем определенной предельной частоты вращения в точке В может быть продлено, например, до достижения точки С, если определено, что транспортное средство прошло вершину подъема.
Для сравнения местоположения транспортного средства с "ошибочными местоположениями" используют несколько таблиц с данными местоположения, которые хранятся в памяти системы транспортного средства, и предпочтительно используют одну таблицу для каждой функции, управление которой предусмотрено изобретением. Таким образом, в каждой таблице содержатся данные об "ошибочных местоположениях" или местоположениях, в которых следует применять предельные значения или условия управления, отличающиеся от "нормальных".
Для внесения поправок на изменения условий (таких как, например, различный общий вес, скорость ветра, состояние дорожного покрытия) также целесообразно, но не необходимо, чтобы автоматическая система управления получала информацию о местоположениях, в которых скорректированные предельные значения или условия управления следует применять на определенном расстоянии перед фактическим достижением таких местоположений. Применительно к автоматическому управлению коробкой передач и точке А, показанной на фиг.1 и фиг.2, это можно сформулировать следующим образом: за сто метров (например) до достижения местоположения, в котором система автоматического управления коробкой передач в прошлый раз допустила ошибку, система автоматического управления должна вместо правил нормального управления применить другие правила согласно таблице во избежание повторного совершения такой же ошибки.
Что касается применения особых данных управления, система автоматического управления может использовать их на протяжении определенного заранее заданного расстояния или времени с момента начала их применения. В качестве альтернативы, в системе сохраняют координаты, которые соответствуют моменту возобновления применения нормального управления.
Сравнение местоположений также осуществляют с определенной степенью допуска. Такой допуск может быть одинаковым для всех местоположений, заложенных в систему, или отличаться для каждой функции или отличаться для каждой функции и местоположения.
С целью пояснения изобретения на фиг.4 проиллюстрирована таблица, которую применяют в системе предложенной в настоящем изобретении: предпочтительно, в системе, предложенной в настоящем изобретении, используют одну таблицу на функцию для функций с автоматическим управлением, но, конечно, это может быть сделано иным способом в рамках настоящего изобретения. Как описано выше, показанная на фиг.4 таблица содержит координаты точки, в которой система автоматического управления должна применить правила, отличающиеся от нормальных правил. Таблица дополнительно содержит соответствующим образом заданные для каждой функции координаты "предупредительной точки", иными словами, точки, находящейся на определенном расстоянии перед точкой, в которой система автоматического управления должна применить правила, отличающиеся от нормальных правил, и координаты "конечной точки", иными словами, точки, в которой система автоматического управления должна возобновить нормальную работу. Конечная точка также может быть отображена в виде времени окончания.
Помимо названных координат таблица также содержит данные о правилах, применимых в соответствующей точке. Эти правила представляют самые разнообразные правила, например, запрет на осуществление определенного действия или принуждение осуществления определенного действия или более или менее жесткие предельные временные рамки осуществления определенного действия. Если пределы должны быть более жесткими или менее жесткими, в таблице содержится соответствующая информация о том, насколько более жесткими или менее жесткими должны быть пределы, что, как показано на фиг.4, отображено в виде величины Δ, которая может быть положительной или отрицательной.
Изобретение описано в основном на примере, который иллюстрирует его применение для автоматического управления коробкой передач, но следует признать, что изобретение в принципе применимо для автоматического управления любой функцией транспортного средства. Другими примерами возможного применения изобретения является автоматическое управление кондиционированием воздуха и другими функциями оптимизации рабочих условий.
Изобретение рассчитано главным образом на наземные транспортные средства и, в первую очередь, на дорожные транспортные средства, иными словами, колесные транспортные средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СИСТЕМА РЕГИСТРАЦИИ ДОРОЖНОЙ ОБСТАНОВКИ | 2020 |
|
RU2749527C1 |
| УСТРОЙСТВО И СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2019 |
|
RU2736930C1 |
| Система для выявления нарушений правил дорожного движения | 2021 |
|
RU2778165C1 |
| Способ навигации летательных аппаратов | 2016 |
|
RU2611564C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228542C1 |
| РАДИОПОИСКОВАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2244642C1 |
| СИСТЕМА И СПОСОБ ВИДЕОМОНИТОРИНГА ЛЕСА | 2011 |
|
RU2458407C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| СПОСОБ ВИЗУАЛЬНОЙ ЛОКАЛИЗАЦИИ ГОРОДСКОГО РЕЛЬСОВОГО ТРАНСПОРТА НА ОСНОВЕ ФИЛЬТРОВ ЧАСТИЦ КАЛМАНА И ДАННЫХ О КАРТИРОВАНИИ | 2023 |
|
RU2807978C1 |
| Универсальный способ фотофиксации нарушений ПДД | 2019 |
|
RU2749941C2 |
Группа изобретений относится к области автоматического управления параметрами движения транспортных средств (ТС). Согласно предложенному способу осуществляют автоматическое управление одной или несколькими функциями ТС, определяют местоположение (х, у) ТС на местности и сравнивают местоположение ТС с одним или несколькими ранее запомненными местоположениями. Ранее запомненные местоположения являются местоположениями, в которых, как установлено в предыдущих случаях, система автоматического управления осуществила управляющее действие, вышедшее за заранее заданные допустимые пределы. Если определенное местоположение ТС соответствует одному из ранее запомненных местоположений, используют особые ранее запомненные данные управления, чтобы снизить вероятность того, что в процессе управления будут снова нарушены указанные заранее заданные допустимые пределы. Также осуществляет оценку автоматического управления одной или несколькими функциями ТС и сохраняют в памяти местоположения (х, у) на местности, в которых по данным оценки система автоматического управления осуществила действие, которое вышло за заранее заданные допустимые пределы. В состав предложенной системы входят средство автоматического управления одной или несколькими функциями ТС, средство определения местоположения (координат х, у) ТС на местности, средство сравнения местоположения ТС с одним или несколькими ранее запомненными в системе местоположениями и средство принятия решений для оценки результатов сравнения местоположений. Группа изобретений обеспечивает оптимизацию автоматического управления одной или несколькими функциями ТС. 2 н. и 20 з.п. ф-лы, 4 ил.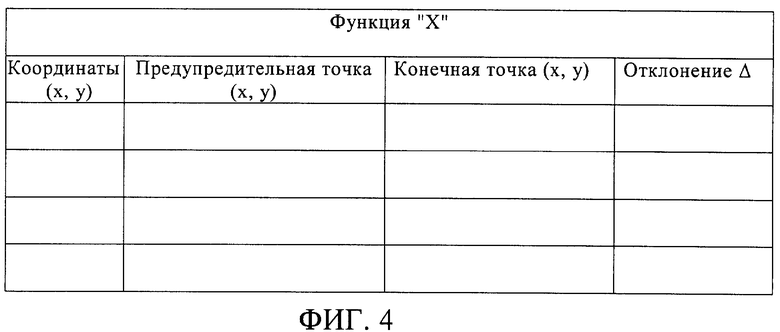
воздействуют средством автоматического управления на одну или несколько функций транспортного средства,
определяют (шаг 310) местоположение (координаты х,у) транспортного средства на местности,
сравнивают (шаг 320) местоположение транспортного средства с одним или несколькими ранее запомненными местоположениями,
отличающийся тем, что
ранее запомненные местоположения являются местоположениями, для которых установлено (шаг 321), что в предыдущих случаях система автоматического управления осуществила управляющее действие, которое вышло за заранее заданные допустимые пределы, и,
если определенное местоположение транспортного средства соответствует одному из ранее запомненных местоположений, для воздействия средством автоматического управления на одну или несколько функций транспортного средства учитывают (шаг 330) ранее запомненные данные управления, представляющие собой данные о просчетах и ошибках управления, которые система автоматического управления допустила в предшествующих случаях при нахождении транспортного средства в соответствующем местоположении, чтобы снизить вероятность повторного осуществления в том же местоположении управляющего действия, выходящего за заранее заданные допустимые пределы.
средство автоматического управления одной или несколькими функциями транспортного средства,
средство определения местоположения (координат х, у) транспортного средства на местности,
средство сравнения местоположения транспортного средства с одним или несколькими ранее запомненными в системе местоположениями,
отличающаяся тем, что ранее запомненные местоположения являются местоположениями, в которых в предыдущих случаях система автоматического управления осуществила управляющее действие, вышедшее за заранее заданные допустимые пределы, и имеется средство принятия решений для оценки результатов сравнения местоположений, которое, если местоположение транспортного средства соответствует одному из ранее запомненных местоположений, определяет, что средство автоматического управления должно учитывать ранее запомненные данные управления, представляющие собой данные о просчетах и ошибках управления, которые система автоматического управления допустила в предшествующих случаях при нахождении транспортного средства в соответствующем местоположении.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5911771 A, 15.06.1999 | |||
| DE 4337163 A1, 11.05.1994 | |||
| Система управления автоматической трансмиссией транспортного средства | 1989 |
|
SU1731661A1 |

