Изобретение относится к авиации, а более конкретно к летательным аппаратам, предназначенным для перевозки пассажиров, багажа и грузов.
Известен летательный аппарат «Нимут Парасол» с неподвижным круглым крылом [1] (стр. 118). Достоинством предлагаемого летательного аппарата является стремление его разработчиков обеспечить минимально возможное лобовое сопротивление конструкции при заданной площади крыла. Однако даже при первоначальных испытаниях выявилось столько трудноустранимых недостатков, что дальнейшего развития проект не получил.
Известен летательный аппарат немецкий вертолет FW-61 фирмы «Фоке-Ахелис» [1] (стр. 99). Данный летательный аппарат имел воздушный винт, обеспечивающий горизонтальную тягу, два воздушных винта для подъемной силы, двигатель, хвостовое оперение (характерное для самолетных конструкций), шасси и необходимые функциональные системы. Основным достоинством данного летательного аппарата является простота конструкции и надежность при его эксплуатации, что и позволило его отнести к наиболее удачным вертолетам того времени. Недостаток рассматриваемого технического решения характерен для вертолетов и проявляется в большом расходе топлива.
Наиболее близким к предложенному техническому решению является конвертоплан XV-3 фирмы «Белл» [1] (стр. 222), у которого подъемная сила и тяга создавались двумя воздушными винтами, приводимыми в движение одним двигателем. Данный летательный аппарат кроме отмеченных воздушных винтов имеет горизонтальные обтекаемые балки (в виде вырожденных крыльев) со встроенной в них трансмиссией, двигатель, хвостовое оперение (характерное для самолетных конструкций), шасси и необходимые функциональные системы. Реализованная в нем схема с поворотными винтами обеспечивает переход от вертикального полета к горизонтальному за счет постепенного перевода винтов на горизонтальную тягу (поворот осей вращения винтов с вертикального положения в горизонтальное). Достоинством его, как и любого конвертоплана, является совмещение определенных положительных эффектов вертолетных и самолетных решений. Основными недостатками данного летательного аппарата являются: сложность его конструкции и, следовательно, высокая стоимость разработки и эксплуатации, а также пониженный ресурс его основных узлов.
Задача заявленного технического решения - повысить эксплуатационные качества летательного аппарата, в том числе упростить процесс управления данным летательным аппаратом, а также уменьшить сложность конструкции, стоимость разработки и изготовления,
Указанная задача решается тем, что исключают механизм поворота оси перпендикулярного участка трансмиссии (4) горизонтальной балки (3), вводят воздушный винт горизонтальной тяги и вместо поворотных воздушных винтов устанавливают вращающиеся в противоположных направлениях круглые крылья (1). При этом каждое крыло имеет радиально расположенные по периметру качающиеся лопасти (2). Лопасти совершают колебания в вертикальной плоскости в зависимости от угла поворота крыла. Крылья имеют возможность при необходимости осуществлять притормаживание вращения любого из них.
Качающиеся лопасти имеют несколько режимов функционирования лопастей. При основном режиме лопасть достигает максимально нижней точки ее колебания (качания) в тот момент, когда проекция оси лопасти при вращении крыла пересекается с осью фюзеляжа, а свободный конец лопасти направлен к носу летательного аппарата. Противоположному положению лопасти в плоскости вращения крыла соответствует максимально верхняя точка ее колебания. Таким образом, лопасть совершает полный цикл колебания в вертикальной плоскости за один оборот крыла.
Дополнительный режим функционирования лопастей отличается от предыдущего режима тем, что проекция лопасти, находящейся в максимально нижней точке колебания, не совпадает с аналогичным ее положением при основном режиме, а смещена от него на положительный или отрицательный угол.
Кроме этого летательный аппарат имеет возможность переходить в третий режим функционирования лопастей. Этот режим (предназначенный для так называемого автожирного варианта полета) исключает колебания лопастей, устанавливая их неподвижными в плоскости крыла. Его возможное функционирование наступает после завершения взлетного участка полета и при достижении определенной горизонтальной скорости летательным аппаратом.
Заявленное техническое решение от прототипа отличается тем, что исключают механизм поворота оси (в вертикальной плоскости) перпендикулярного участка трансмиссии горизонтальной балки, вводят воздушный винт горизонтальной тяги и вместо поворотных воздушных винтов устанавливают вращающиеся в противоположных направлениях круглые крылья. Крылья имеют возможность при необходимости осуществлять притормаживание вращения любого из них. При этом каждое крыло имеет радиально расположенные по периметру качающиеся лопасти. Лопасти совершают колебания в вертикальной плоскости в зависимости от угла поворота крыла.
Качающиеся лопасти имеют несколько режимов функционирования лопастей: основной, дополнительный и третий. При основном режиме лопасть достигает максимально нижней точки ее колебания (качания) в тот момент, когда проекция оси лопасти при вращении крыла пересекается с осью фюзеляжа, а свободный конец лопасти направлен к носу летательного аппарата. Противоположному положению лопасти в плоскости вращения крыла соответствует максимально верхняя точка ее колебания. Таким образом, лопасть совершает полный цикл колебания в вертикальной плоскости за один оборот крыла.
Дополнительный режим функционирования лопастей отличается от предыдущего режима тем, что проекция лопасти, находящейся в максимально нижней точке колебания, не совпадает с аналогичным ее положением при основном режиме, а смещена от него на положительный или отрицательный угол.
Третий режим функционирования лопастей (режим так называемого автожирного варианта полета) исключает колебания лопастей, устанавливая их в плоскости крыла.
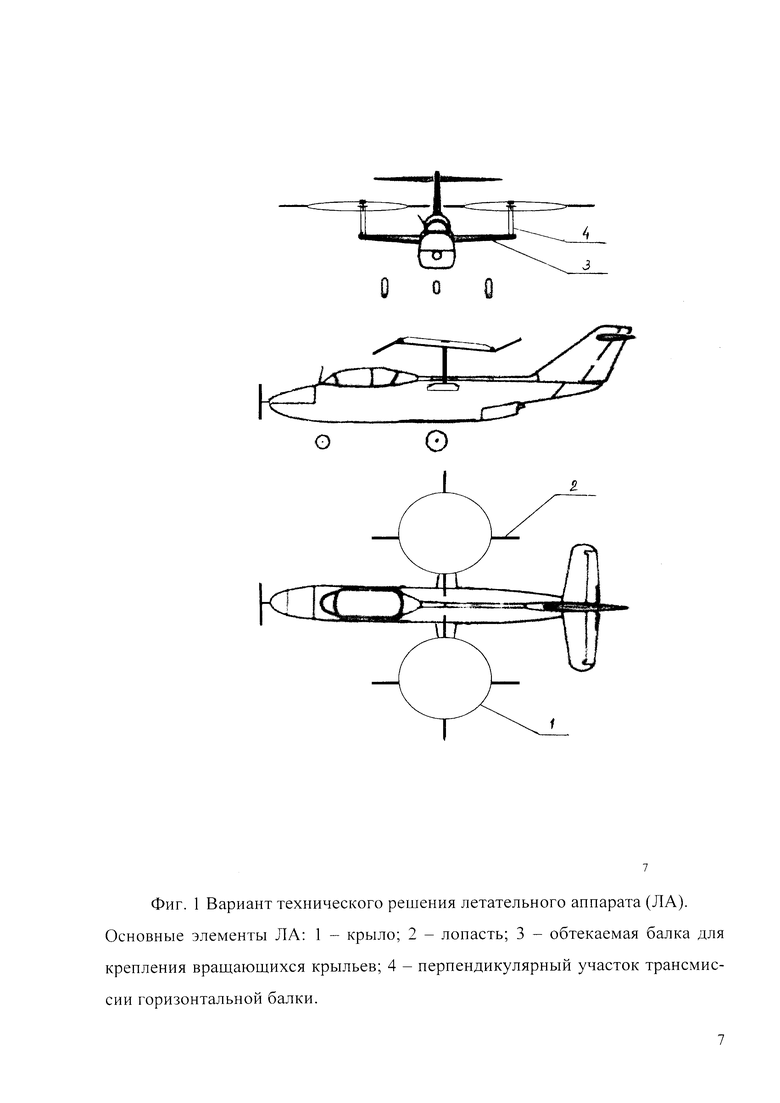
Заявленный летательный аппарат (его схематическое решение приведено на фиг. 1) функционирует следующим образом. Следует рассматривать отдельно его работу на взлетно-посадочном этапе и на участке крейсерского полета. На взлетно-посадочном этапе возможны два варианта полета. При первом варианте (на взлете) максимальная мощность силовой установки прикладывается на вращающиеся крылья (1), обеспечивая отрыв летательного аппарата от земли и набор высоты, достаточной для безопасного горизонтального полета. При этом величина горизонтальной тяги устанавливается минимальной. Затем за счет увеличения прикладываемой мощности к винту горизонтальной тяги увеличивают горизонтальную скорость и по мере необходимости соответственно снижают мощность, передаваемую на вращающиеся крылья. Во время посадки летательного аппарата реализуется обратная последовательность распределения мощности между винтом горизонтальной тяги и крыльями.
При втором варианте, соответствующем самолетному варианту взлета, максимальная мощность силовой установки прикладывается к винту горизонтальной тяги. По мере достижения определенной скорости разбега необходимая мощность передается на вращающиеся крылья, обеспечивая тем самым укороченный взлет.
После завершения взлетного участка и набора необходимой высоты летательный аппарат продолжает использовать режим функционирования лопастей, соответствующий конечной точке набора высоты (первый вариант крейсерского полета). Необходимо также отметить, что такой вариант полета при рациональном распределении мощностей между винтом тяги и вращающимися крыльями позволяет выполнять полет с более низкой скоростью, чем это допустимо для обычных самолетов. Дополнительный режим функционирования лопастей используется на участках маневрирования.
При другом варианте крейсерского полета летательный аппарат использует третий режим функционирования лопастей и включается в работу только после достижения определенной горизонтальной скорости полета. Этот режим исключает колебания лопастей, устанавливая их неподвижными в плоскости крыла. При этом осуществляется разъединение связи между силовой установкой и вращающимися крыльями. Последние от воздействия набегающего потока воздуха изменяют направление своего вращения. И при достижении стационарной скорости вращения крыльев полет переходит в так называемый автожирный вариант полета, позволяющий (кроме обычного полета) выполнять более безопасную аварийную посадку летательного аппарата.
Технический результат проявляется в повышении эксплуатационных качеств летательного аппарата за счет введения отличительных признаков. Более подробно: упрощается взлетно-посадочный процесс по сравнению с аналогичным процессом у конвертоплана и уменьшается разбег по сравнению с самолетом; увеличивается ресурс за счет исключения сложных узлов, обеспечивающих поворот осей воздушных винтов; снижаются требования к обслуживающему персоналу и упрощается процесс управления летательным аппаратом. Кроме того, уменьшается сложность конструкции, стоимость разработки и изготовления.
На фиг 1. летательный аппарат (в виде варианта с поперечно расположенными крыльями) представлен следующим образом: вид спереди, сбоку и сверху. На данных схематических построениях видно, что фюзеляж, винт горизонтальной тяги, хвостовое оперение и шасси имеют исполнение, характерное для самолетных конструкций. Круглые крылья (1) установлены симметрично по бокам фюзеляжа на горизонтальных балках (3) с использованием перпендикулярного участка трансмиссии (4). Горизонтальные балки, имеющие обтекаемую форму, на рисунке изображены в упрощенном виде. Качающиеся лопасти (2), выбранные для данного примера в количестве четырех, располагаются по периметру крыла в радиальных направлениях и изображены также в упрощенном виде. Их положение в плоскости качания соответствует основному режиму функционирования лопастей.
Описание технического решения, соответствующего пункту 3 формулы изобретения, в основном аналогично предшествующему и отличается лишь тем, что оси вращающихся крыльев располагают концентрически на одной линии в определенной точке фюзеляжа. И трансмиссия обеспечивает передачу вращающего момента от силовой установки к крыльям в соответствии с их новым конструктивным решением.
Источники информации
1. Бауэр П.М. Летательные аппараты нетрадиционных схем. - М.: Мир, 1991. - 320 с.
2. Курочкин Ф.П. Основы проектирования самолетов с вертикальным взлетом и посадкой. - М.: Машгиз, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ "САМПО 2" | 2016 |
|
RU2647294C2 |
| Автожир | 2019 |
|
RU2730082C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| МАХОВОЙ ДИАФРАГМЕННЫЙ ДВИЖИТЕЛЬ (ЕГО ВАРИАНТЫ) И МАХОВОЙ САМОЛЕТ НА ЕГО ОСНОВЕ | 1996 |
|
RU2123455C1 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| КОНВЕРТОПЛАН | 2004 |
|
RU2282566C2 |
| Конвертоплан | 2017 |
|
RU2657706C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2652868C1 |
Изобретение относится к авиации. Летательный аппарат содержит фюзеляж, горизонтальное и вертикальное хвостовое оперение, силовую установку, предпочтительно из двух двигателей, обтекаемые горизонтальные балки, шасси, воздушный винт горизонтальной тяги, трансмиссию, а также вращающиеся в противоположных направлениях круглые крылья. Крылья имеют возможность притормаживания вращения любого из них. Каждое крыло имеет радиально расположенные по периметру качающиеся лопасти, которые совершают полный цикл колебания в вертикальной плоскости за один оборот крыла. При функционировании лопастей в плоскости колебания лопасти имеют возможность исключать колебания лопастей и устанавливать их неподвижными в плоскости крыла. Достигается повышение эксплуатационных качеств, уменьшение сложности конструкции. 2 н. и 1 з.п. ф-лы, 1 ил.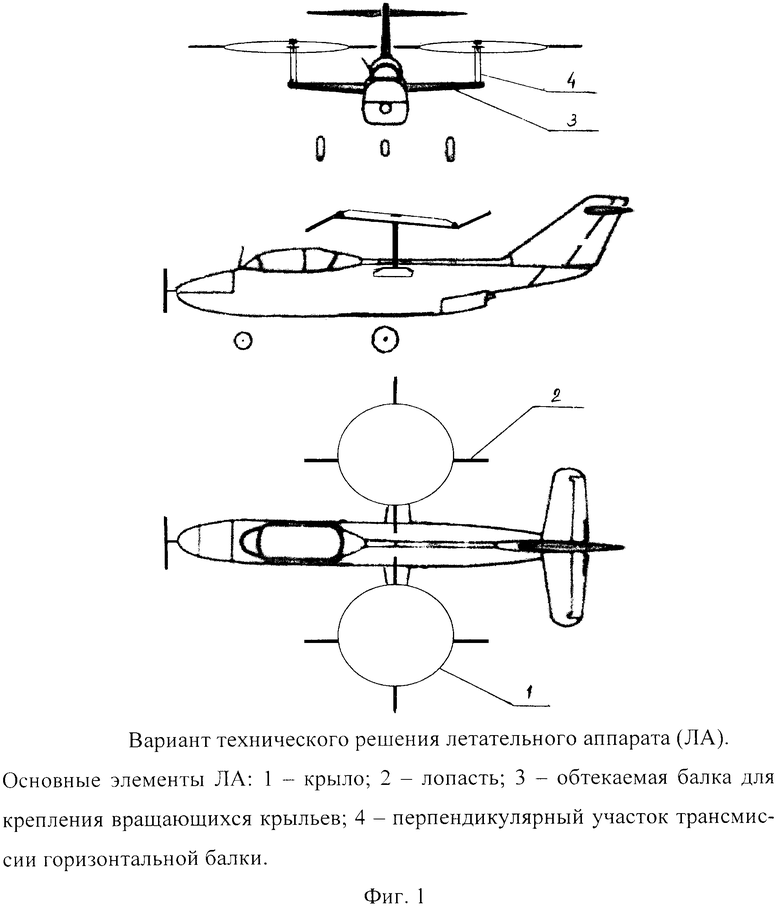
1. Летательный аппарат, содержащий фюзеляж, крыло, горизонтальное и вертикальное хвостовое оперение, силовую установку, предпочтительно из двух двигателей, трансмиссию, обтекаемые горизонтальные балки, шасси и необходимые функциональные системы, отличающийся тем, что вводят воздушный винт горизонтальной тяги и устанавливают вращающиеся в противоположных направлениях круглые крылья, а каждое крыло имеет радиально расположенные по периметру качающиеся лопасти, при этом каждая лопасть совершает полный цикл колебания в вертикальной плоскости за один оборот крыла.
2. Летательный аппарат по п.1, отличающийся тем, что каждое крыло имеет возможность притормаживания вращения любого из них, а функционирование лопастей в плоскости колебания осуществляется в трех режимах: в основном, при котором лопасть достигает максимально нижней точки ее колебания в тот момент, когда проекция оси лопасти при вращении крыла пересекается с осью фюзеляжа, а свободный конец лопасти направлен к носу летательного аппарата, в дополнительном, отличающемся от предыдущего режима тем, что проекция лопасти, находящейся в максимально нижней точке колебания, не совпадает с аналогичным ее положением при основном режиме, а смещена от него на положительный или отрицательный угол, и в третьем режиме, при котором исключают колебания лопастей и устанавливают их неподвижными в плоскости крыла.
3. Летательный аппарат, содержащий фюзеляж, горизонтальное и вертикальное хвостовое оперение, силовую установку, предпочтительно из двух двигателей, обтекаемые горизонтальные балки, шасси и необходимые функциональные системы, воздушный винт горизонтальной тяги, трансмиссию, а также вращающиеся в противоположных направлениях круглые крылья, оси которых расположены концентрически на одной линии в определенной точке фюзеляжа, а сами крылья имеют возможность притормаживания вращения любого из них, при этом каждое крыло имеет радиально расположенные по периметру качающиеся лопасти, которые совершают полный цикл колебания в вертикальной плоскости за один оборот крыла, а функционирование лопастей в плоскости колебания осуществляется в трех режимах: в основном, при котором лопасть достигает максимально нижней точки ее колебания в тот момент, когда проекция оси лопасти при вращении крыла пересекается с осью фюзеляжа, а свободный конец лопасти направлен к носу летательного аппарата, в дополнительном, отличающемся от предыдущего режима тем, что проекция лопасти, находящейся в максимально нижней точке колебания, не совпадает с аналогичным ее положением в предыдущем режиме, а смещена от него на положительный или отрицательный угол, и в третьем режиме, при котором исключают колебания лопастей и устанавливают их неподвижными в плоскости крыла.
| US 1961996 A, 05.06.1934 | |||
| САМОЛЕТ ПАВЛОВЫХ | 2000 |
|
RU2192986C2 |
| US 4195800 A, 01.04.1980 | |||
| US 6062508 A, 16.05.2000 | |||
| Самолет | 1926 |
|
SU4137A1 |

