Изобретение относится к транспортным устройствам, автономно работающим внутри магистральных трубопроводов большого диаметра, например, газопроводов, и служащим для перемещения внутри трубопровода диагностического и ремонтного оборудования, и имеющим на борту мощный источник электроэнергии в виде электрогенератора, получающего энергию от транспортируемого в трубопроводе продукта.
Известно внутритрубное транспортное средство, содержащее корпус с удерживающими его по оси трубопровода опорными колесами и с осевой турбинкой, соединенной с электрогенератором (см. патент РФ №2069288, МПК F17D 5/12, опубл. 20.11.1996 г.). У такого транспортного средства наряду с аккумуляторной батареей имеется аварийный источник электроэнергии, выполняющий вспомогательную функцию. Такое транспортное средство может двигаться вдоль по потоку транспортируемого продукта или стоять на месте. Регулирование скорости движения такого устройства относительно поверхности трубопровода весьма затруднительно.
Наиболее близким к настоящему изобретению является внутритрубное транспортное средство с автономным источником электроэнергии, содержащее корпус с удерживающими его по оси трубопровода опорными колесами и с аэродинамическим винтом, соединенным с электрогенератором (см. патент РФ №2109206, МПК F17D 5/00, опубл. 20.04.1998 г.). Такое внутритрубное транспортное средство используется в составе дефектоскопа-снаряда для дефектоскопии трубопровода изнутри и включает два модуля с гидроприводом осевого возвратно-поступательного перемещения одного модуля относительно другого. Аэродинамический винт заставляет работать гидронасос, а тот, в свою очередь, заставляет работать гидроприводы осевого возвратно-поступательного перемещения одного модуля относительно другого, а также вращать вал электрогенератора. Такое транспортное средство обладает рядом существенных недостатков, во-первых, на "непрерывном" режиме очень трудно регулировать скорость движения устройства относительно трубопровода;
на "шаговом" режиме, помимо того, что скорость движения устройства чересчур мала, само движение получается в виде череды толчков и остановок, что может плохо сказаться на работе аппаратуры для дефектоскопии;
во-вторых, само устройство получается громоздким и сложным. Оно состоит из двух платформ, соединенных гидроприводом, а работа в "шаговом" режиме требует довольно сложной автоматики для слаженной работы гидронасоса и гидроприводов.
Задача изобретения - упростить конструкцию устройства, сделать ее более компактной.
Дополнительная задача - обеспечить плавное движения транспортного средства вдоль внутренней поверхности трубы с оптимальной для дефектоскопии трубопровода скоростью как по потоку транспортируемого продукта, так и против этого потока за счет снабжения опорных колес электроприводом, подключенным к электрогенератору.
Указанные задачи достигаются тем, что во внутритрубном транспортном средстве с автономным источником электроэнергии, содержащем корпус с удерживающими его по оси трубопровода опорными колесами и с аэродинамическим винтом, соединенным с электрогенератором, опорные колеса снабжены электроприводом, подключенным к электрогенератору.
Кроме того, желательно, чтобы внутритрубное транспортное средство было снабжено устройством для прижатия колес к трубопроводу и тормозным устройством. Корпус может быть выполнен кольцевым, а лопасти аэродинамического винта выполнены поворотными относительно их продольной оси.
Кроме того, указанное транспортное средство может быть снабжено:
- электроаккумулятором, соединенным с электрогенератором;
- устройством для дефектоскопии трубопровода;
- манипулятором для ремонта трубопровода;
- системой автоматического управления работой устройства для дефектоскопии;
- устройством для передачи информации оператору;
- дополнительными колесами, у которых оси вращения направлены вдоль продольной оси устройства, а, по меньшей мере, одно из них выполнено с электроприводом;
- манипулятор может быть выполнен с возможностью его окружного перемещения.
Снабдив опорные колеса электроприводом, подключенным к электрогенератору, можно иметь более простое и компактное устройство относительно устройства по патенту РФ №2109206, МПК F17D 5/00. Объясняется это тем, что в настоящем изобретении нужен один корпус, а не два как в патенте РФ №2109206, отпадает необходимость в гидроцилиндре между двумя корпусами и в автоматике для обеспечения движения в "шаговом" режиме передвижения корпусов. Помимо этого настоящее изобретение позволяет обеспечить плавное движение транспортного средства вдоль внутренней поверхности трубы с оптимальной для дефектоскопии трубопровода скоростью как по потоку транспортируемого продукта, так и против этого потока, так как управление скоростью вращения опорных колес затруднений не вызывает.
Устройство для прижатия колес к трубопроводу позволяет прижимать колеса к трубопроводу, по которому движется устройство с оптимальным усилием, обеспечивающим надежное сцепление колес и трубопровода и исключающим проскальзывание колес.
Кольцевой корпус позволяет иметь минимальное лобовое сопротивление устройства в потоке транспортируемого продукта, что снижает его гидравлическое сопротивление. Поэтому, помимо снижения потерь давления в магистрали, управлять таким устройством легче.
Выполнение лопастей аэродинамического винта поворотными относительно их продольной оси позволяет регулировать мощность на валу винта и, следовательно, регулировать мощность, создаваемую электрогенератором.
Тормозное устройство позволяет останавливать устройство в заданном месте, производить там необходимые работы и двигаться после этого в любом направлении.
Электроаккумулятор, соединенный с электрогенератором, позволяет иметь дополнительный, запасной источник электроэнергии.
Устройство для дефектоскопии трубопровода, размещенное на нем, позволяет использовать настоящее изобретение в качестве дефектоскопа-снаряда для внутритрубного обследования трубопровода.
Манипулятор для ремонта трубопровода позволяет производить ремонт дефектных участков действующего трубопровода, так как устройство обладает достаточной энергетикой для любого ремонта, а возможность окружного перемещения манипулятора позволяет добираться до любых мест на трубопроводе.
Система автоматического управления работой устройства для дефектоскопии позволяет обеспечить работу устройства в автономном режиме.
Устройство для передачи информации оператору позволяет в режиме текущего времени иметь информацию о наиболее проблемных участках трубопровода.
Дополнительные колеса, у которых оси вращения направлены вдоль продольной оси устройства, а, по меньшей мере, одно из них выполнено с электроприводом, позволяют поворачиваться всему транспортному средству вокруг продольной оси трубопровода и подводить дефектоскопическую и ремонтную аппаратуру непосредственно к месту дефекта на трубопроводе.
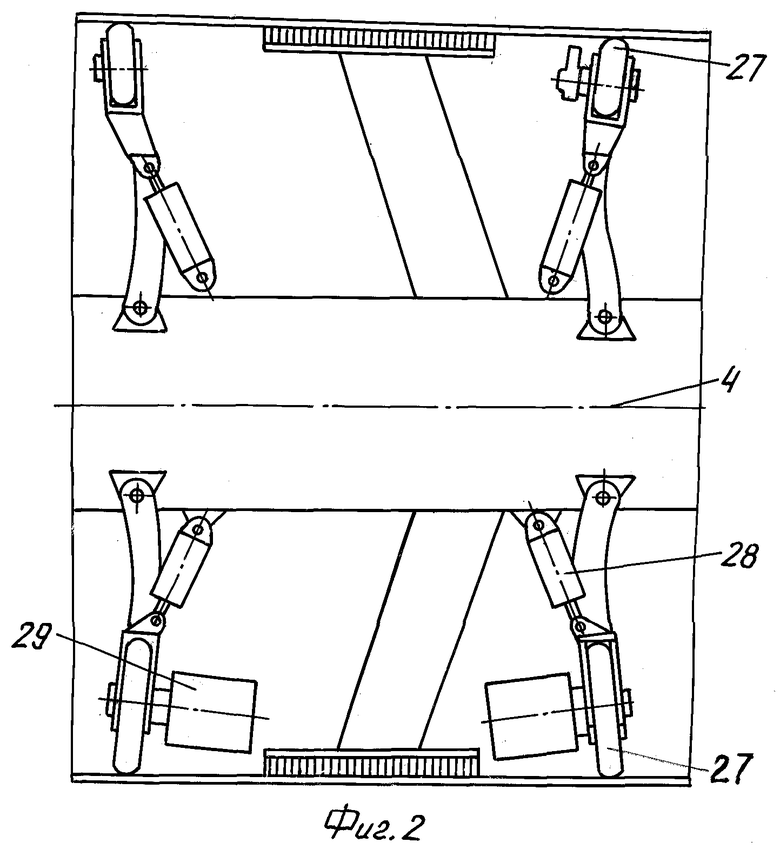
На фиг.1 изображен продольный разрез внутритрубного транспортного средства с автономным источником электроэнергии с электроприводом опорных колес;
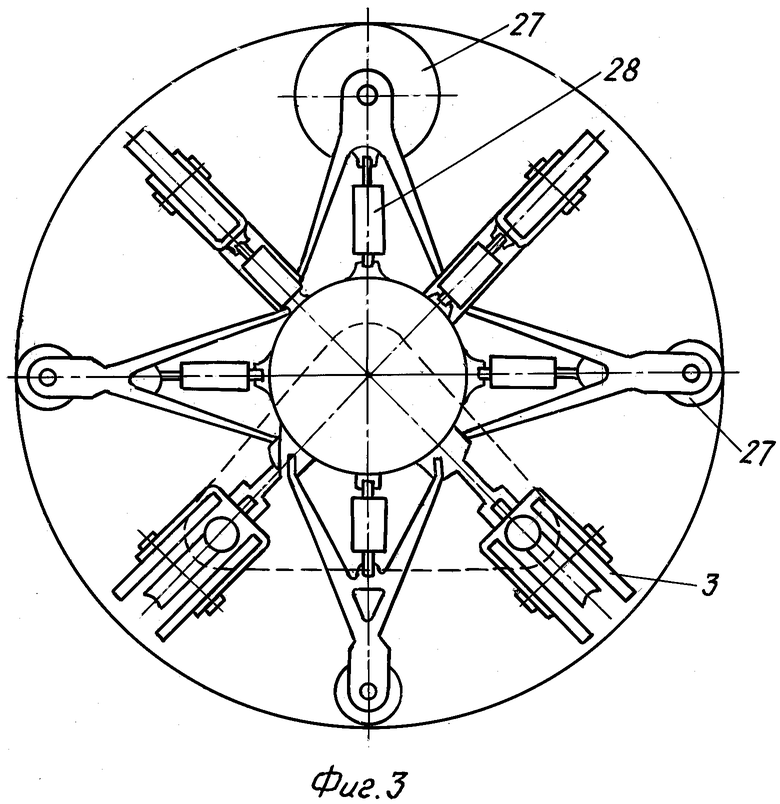
на фиг.2 изображен продольный разрез внутритрубного транспортного средства с дополнительными колесами;
на фиг.3 показан вид спереди на устройство в месте расположения дополнительных колес.
Внутритрубное транспортное средство с автономным источником электроэнергии содержит корпус 1 с удерживающими его на продольной оси 2 трубопровода опорными колесами 3, оси вращения которых перпендикулярны продольной оси 4 транспортного средства, и с аэродинамическим винтом 5, вал которого соединен с валом электрогенератора 6. Опорные колеса 3 установлены в 2 ряда по 4 колеса в каждом ряду, при этом четыре из них снабжены электроприводом 7, электрически подключенным к электрогенератору 6. Электропривод 7 представляет собой электродвигатель 8 с редуктором, вал 9 которого цепными передачами 10 соединен с валами 11 червячных передач, червячные колеса 12 которых жестко соединены с осями четырех ведущих опорных колес 3.
Помимо этого оно может быть снабжено устройством для перемещения опорных колес поперек поверхности трубопровода. Для этого стойки 13 опорных колес 3 выполняются шарнирно закрепленными на центральном корпусе 1, а их центральная часть гидроцилиндрами 14 связана с центральным корпусом 1.
Центральный корпус 1 может быть выполнен кольцевым.
Лопасти 15 аэродинамического винта 5 могут быть снабжены устройствами поворота 16 для их поворота относительно их продольной оси 17.
Кроме того, внутритрубное транспортное средство может снабжено:
- тормозным устройством в виде четырех тормозных пластин 18 с прижимными цилиндрами 19;
- электроаккумулятором 20, соединенным с электрогенератором 6;
- устройством для дефектоскопии трубопровода 21 с датчиками 22, размещенным в центральном корпусе 1;
- агрегатами 23 для ремонта трубопровода, размещенными на манипуляторе 24, который выполнен с возможностью его окружного перемещения;
- системой автоматического управления 25 работой устройства для дефектоскопии 21;
- устройством 26 для передачи информации оператору;
- двумя рядами дополнительных колес 27 с гидроцилиндрами 28, у которых оси вращения направлены вдоль продольной оси устройства, а, по меньшей мере, одно из них в каждом ряду выполнено с электроприводом в виде шагового электродвигателя 29, установленного на двух дополнительных колесах 27 в двух поясах;
- гидронасосом 30, соединенным с гидроцилиндрами 14, 19, 28.
На манипуляторе 24 могут быть установлены датчики 22 и видеокамера 31.
Устройство работает следующим образом.
Внутритрубное транспортное средство помещают внутрь действующего трубопровода, например, магистрального газопровода. Создаваемая на аэродинамическом винте 5 работа с помощью электрогенератора 6 преобразуется в электроэнергию и поступает на электропривод 7 опорных колес 3. Излишки электроэнергии заряжают электроаккумулятор 20. С вала 9 электродвигателя с редуктором 8 с помощью цепных передач 10 вращение передается на валы 11 червячных передач 7 и далее на червячные колеса 12 и на опорные колеса 3. За счет сцепления опорных колес 3 с внутренней поверхностью трубопровода устройство может двигаться вдоль трубопровода с заданной скоростью в ту или иную сторону. Надежное сцепление колес 3 трубопровода обеспечивается усилиями, создаваемыми гидроцилиндрами 14, связанными с гидронасосом 30. Для останова устройства в трубопроводе служат тормозные пластины 18, прижимаемые гидроцилиндрами 19 к поверхности трубопровода. При необходимости проворота устройства относительно трубопровода с помощью гидроцилиндров 28 выдвигаются дополнительные колеса 27 до соприкосновения их с поверхностью трубопровода, а опорные колеса 3 с помощью гидроцилиндров 14 отодвигаются от поверхности трубопровода. Вращение дополнительных колес 27 от дополнительного электропривода (на фиг.1-3 не показан) позволяет всему устройству поворачиваться вокруг своей продольной оси на требуемый угол. После выполнения поворота устройства на заданный угол дополнительные колеса 27 убираются, а опорные колеса 3 выдвигаются в рабочее положение. При использовании внутритрубного транспортного средства в качестве дефектоскопа - снаряда на нем устанавливаются устройства для дефектоскопии 21 с датчиками 22, расположенными в непосредственной близости от поверхности трубопровода. Устройства для дефектоскопии 22 управляются системой автоматического управления 25 или оператором через устройство для передачи информации 26. Информация с устройства для дефектоскопии 21 может передаваться устройством для передачи информации 26 в режиме "текущего времени". К местам обнаружения дефектов в трубопроводе устройство может возвращаться многократно. Для ремонта трубопровода устройством для ремонта 23 можно не поворачивать все устройство вокруг своей продольной оси, а воспользоваться манипулятором 24. Манипулятор 24 перемещает установленные на нем устройства в окружном направлении. Подведение устройства для ремонта 23 к месту обнаружения дефекта в этом случае производится совместной работой манипулятора 24 и работой опорных колес 3. С помощью видеокамеры 31, установленной на манипуляторе 24, оператор может управлять процессом ремонта в режиме "текущего времени". На манипуляторе 24 можно установить датчики 22 устройства для дефектоскопии 21. В этом случае можно отказаться от установки на устройстве дополнительных колес 27.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2015 |
|
RU2581757C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С АВТОНОМНЫМ ИСТОЧНИКОМ ЭЛЕКТРОЭНЕРГИИ | 2001 |
|
RU2197678C1 |
| АВТОНОМНЫЙ АДАПТИВНО ШАГАЮЩИЙ РОБОТ ДЛЯ ДИАГНОСТИКИ ГАЗОПРОВОДОВ | 2014 |
|
RU2571242C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНОГО ТРАНСПОРТНОГО СНАРЯДА В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369454C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АППАРАТА ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2270955C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНОГО ТРАНСПОРТНОГО СНАРЯДА В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2393379C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И ДВУХМОДУЛЬНЫЙ ДЕФЕКТОСКОП-СНАРЯД | 2014 |
|
RU2562333C1 |
Внутритрубное транспортное средство с автономным источником электроэнергии относится к транспортным устройствам, автономно работающим внутри магистральных трубопроводов большого диаметра, например, газопроводов, и служащим для перемещения внутри трубопровода диагностического и ремонтного оборудования. Техническим результатом изобретения является упрощение конструкции устройства, обеспечение ее компактности. Во внутритрубном транспортном средстве с автономным источником электроэнергии, содержащем корпус с удерживающими его по оси трубопровода опорными колесами, стойки которых шарнирно закреплены на корпусе и снабжены гидроцилиндрами для перемещения колес поперек поверхности трубопровода, и с аэродинамическим винтом, соединенным с электрогенератором, по меньшей мере, одно опорное колесо снабжено электроприводом, содержащим электродвигатель с редуктором, вал которого передачей соединен с валом червячной передачи, у которой червячное колесо жестко соединено с опорным колесом, при этом электродвигатель подключен к электрогенератору. 10 з.п. ф-лы, 3 ил.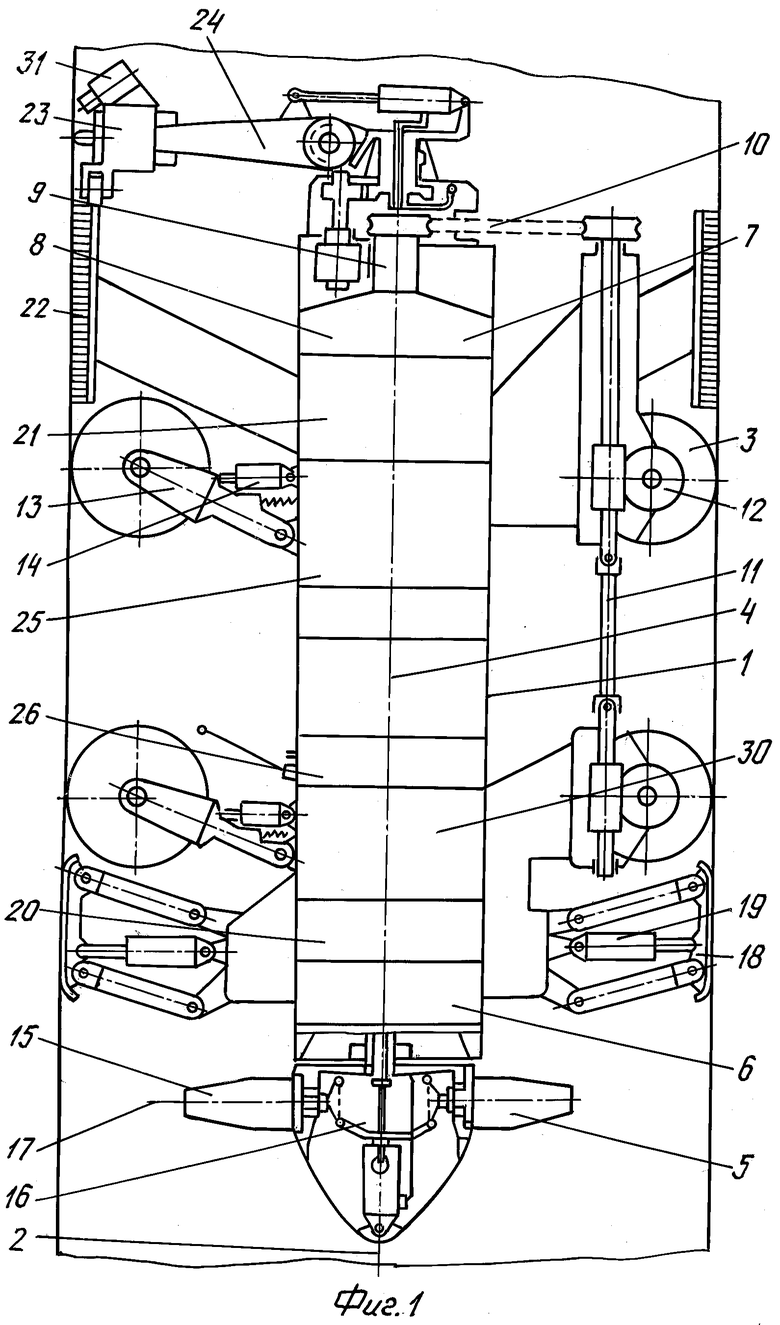
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2109206C1 |
| СПОСОБ ДЕФЕКТОСКОПИЧЕСКОГО КОНТРОЛЯ ТРУБОПРОВОДОВ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2172954C2 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С АВТОНОМНЫМ ИСТОЧНИКОМ ЭЛЕКТРОЭНЕРГИИ | 2001 |
|
RU2197678C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1998 |
|
RU2137024C1 |
| СИСТЕМА ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 2004 |
|
RU2262036C1 |
| ОРГАНОМИНЕРАЛЬНОЕ УДОБРЕНИЕ | 2017 |
|
RU2667159C1 |

