Изобретение относится к летательным аппаратам, способным перемещаться в воздушном пространстве.
Современные летательные аппараты (самолеты, вертолеты) перемещаются в воздухе, используя реактивные двигатели или силовые установки с движителями в виде тянущих или толкающих воздушных винтов (пропеллеров). Опорной средой для придания движения самолету является воздушная среда.
Использование на летательных аппаратах реактивных двигателей и винтов не исключает возможности столкновения их в полете с посторонними предметами (птицами, вулканической пылью, космическим мусором и пр.), находящимися в воздухе, что приводит к авариям и катастрофам. Это происходит неизбежно в связи с тем, что воздухозаборники реактивных двигателей и винты непосредственно контактируют с воздушной средой.
Сравнительно недавно стали известны технические решения, в которых энергия вращающегося вала преобразовывается в кинетическую энергию поступательного движения устройства путем использования массы груза, вращающегося вместе с валом [1]. Причем эти устройства для перемещения в пространстве могут быть выполнены в различной форме и виде: транспортного средства на колесах, на поверхностях скольжения, в виде летающей тарелки и т.п.
Известен аппарат [2], сочетающий устройство вертолета и подводной лодки, использующий для своего движения воздушное и водное пространство.
Все эти аппараты не имеют защиты элементов движителя от столкновения с посторонними предметами, что не обеспечивает их высокой надежности.
Поэтому перед создателем изобретения стояла техническая задача - создать надежный летательный аппарат, исключающий разрушение его движителя в полете при столкновении с посторонними предметами
Наиболее близким аналогом изобретения, принятым за прототип, является летательный аппарат [3], который может летать и двигаться по земле, используя одну опорную среду - воздух. Впереди аппарата установлена кабина управления, а сзади нее расположен вал с пропеллером и большим числом маленьких крыльев по окружности. В зависимости от изменения угла атаки синхронно поворачивающихся малых крыльев аппарат может летать или двигаться по земле. Двигатель, который вращает вал с пропеллером, установлен в задней части устройства, что обеспечивает определенную их защиту от попадания посторонних предметов.
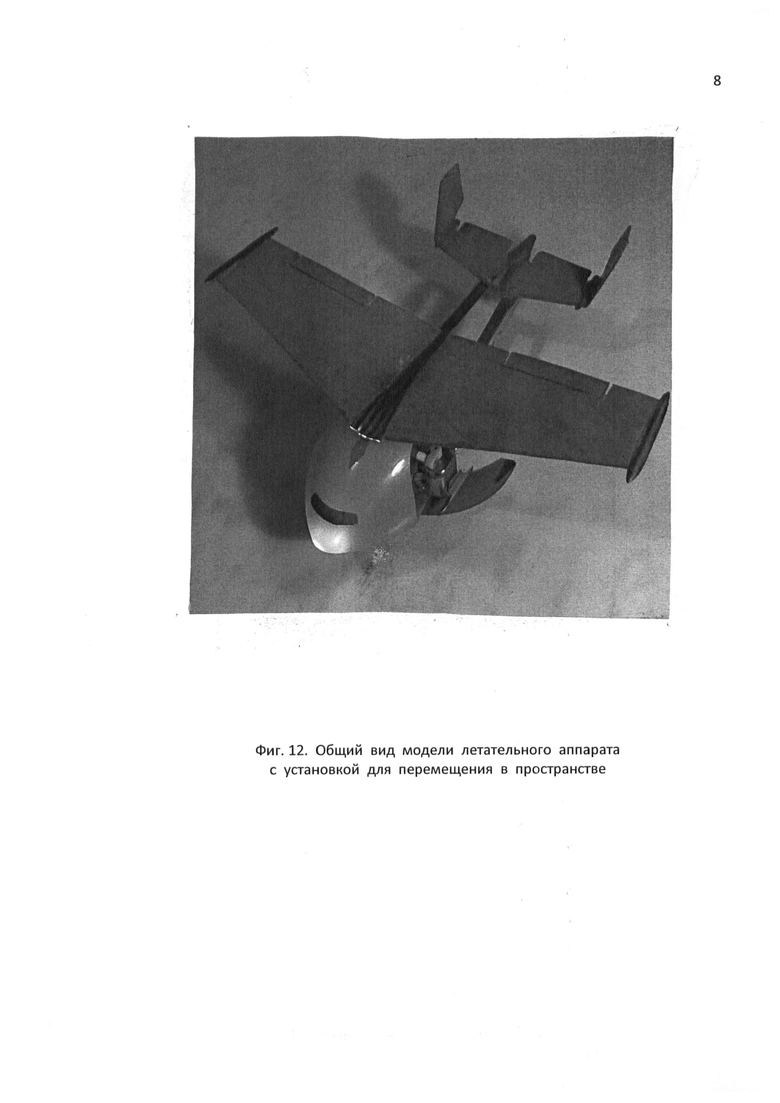
Заявленное транспортное средство предназначено для перемещения в воздушном пространстве в сложных атмосферных условиях. Сущность заявленного аппарата представлена на графических материалах и фотографиях.
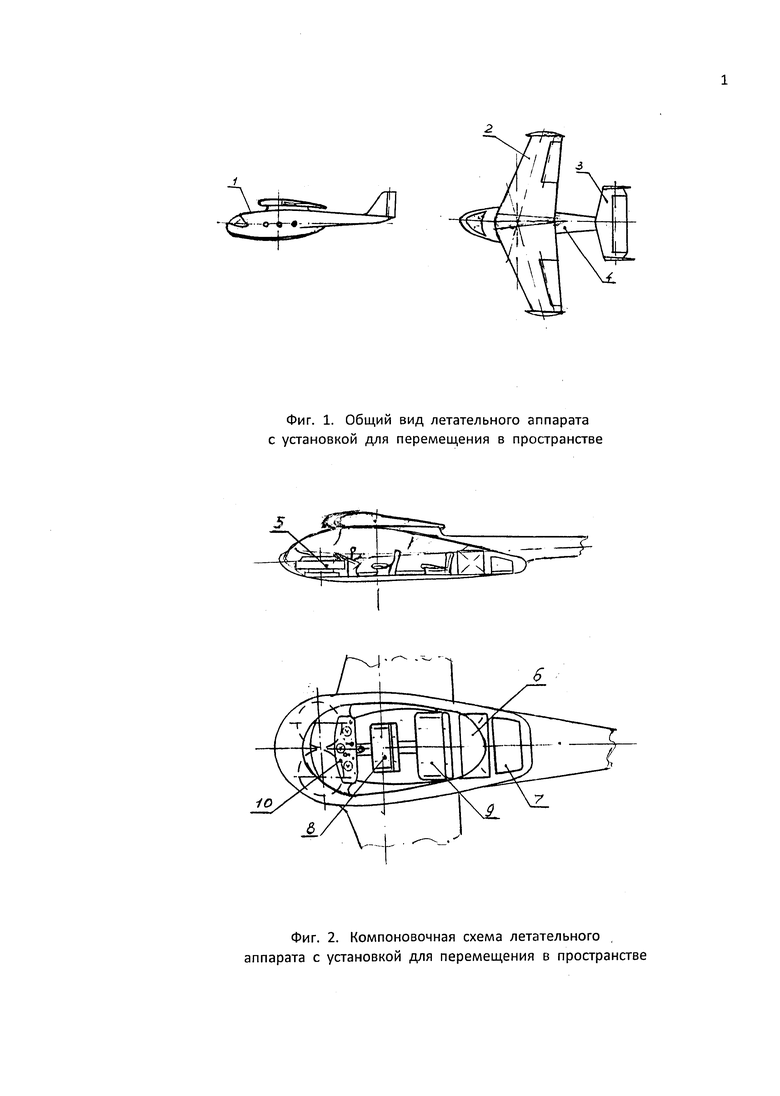
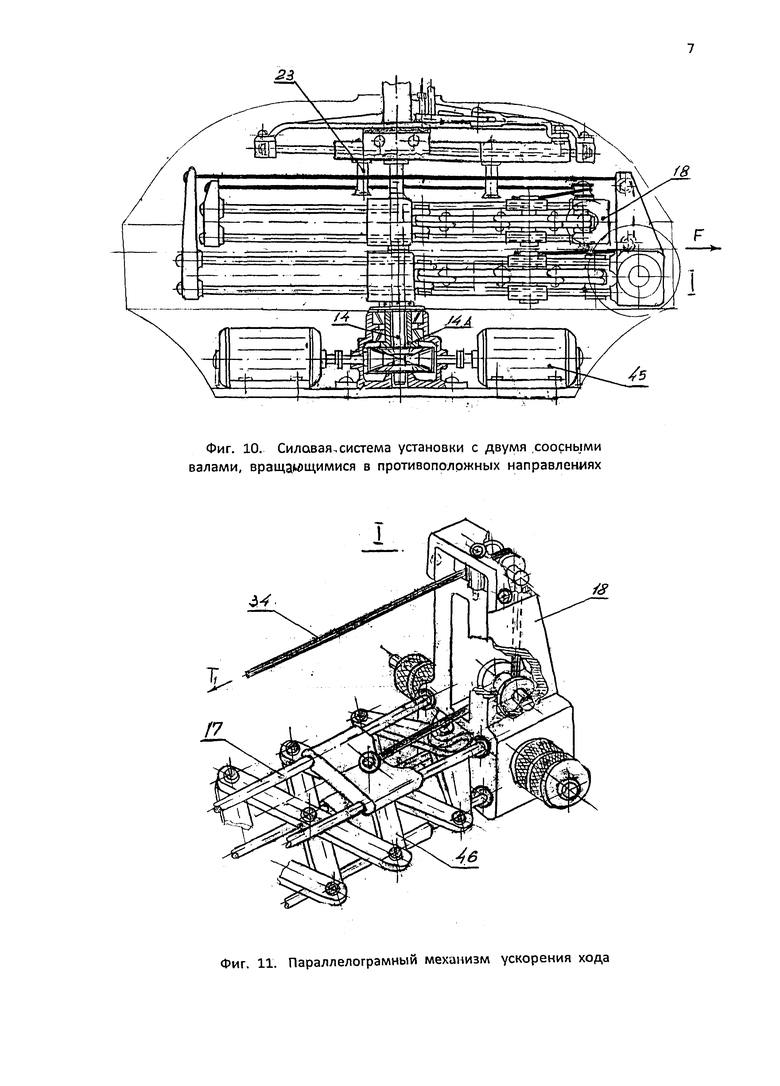
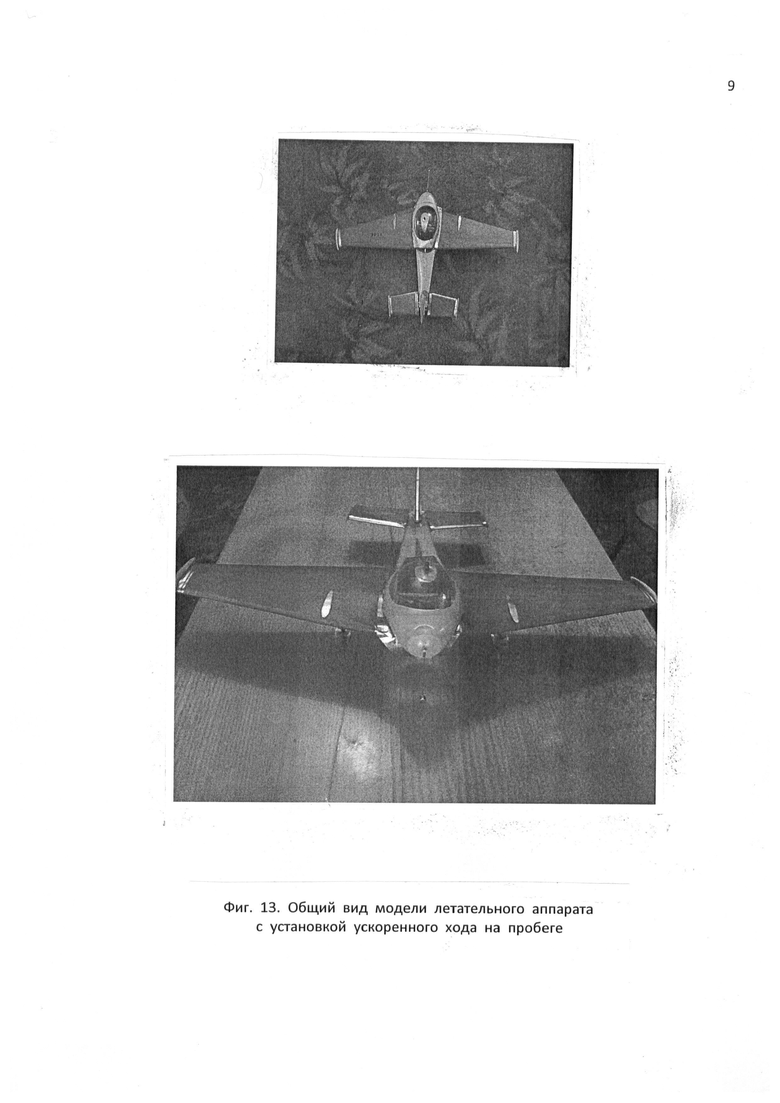
На фиг. 1 представлен общий вид летательного аппарата; на фиг. 2 - компоновочная схема; на фиг. 3 - кинематическая схема; на фиг. 4 - общий вид силовой установки; на фиг. 5 - схема сил, действующих на вращающийся вал, груз и гибкую связь; на фиг. 6 - силы, действующие на аппарат в горизонтальном полете; на фиг. 7 - схема управления силовой установкой; на фиг. 8 - рабочее место пилота; на фиг. 9 - общий вид установки с механизмом ускорения хода; на фиг. 10 - силовая система установки с двумя соосными ведущими валами, вращающимися в противоположных направлениях; на фиг. 11 - параллелограмный механизм ускорения хода; на фиг. 12 - общий вид модели аппарата с установкой; на фиг. 13 - общий вид модели с установкой ускоренного хода.
Представленный на фиг. 1 летательный аппарат содержит фюзеляж 1 обтекаемой формы с прозрачной спереди верхней частью, выполненный герметично; несущее крыло 2 верхнего расположения с элеронами, закрепленное на фюзеляже; хвостовое оперение 3 (стабилизатор и два киля с рулями направления), закрепленное на хвостовой балке 4. Летательный аппарат оснащается всеми необходимыми взлетно-посадочными устройствами (шасси, поплавки, лыжи) в зависимости от конкретных условий эксплуатации и назначения.
Представленная на фиг. 2 компоновка аппарата включает в себя основные элементы конструкции, расположенные внутри фюзеляжа 1: установку 5, преобразующую энергию вращающегося вала, двигатель 6, топливный бак или аккумуляторы 7, место для пилота 8, место для пассажиров 9 и пульт управления 10.
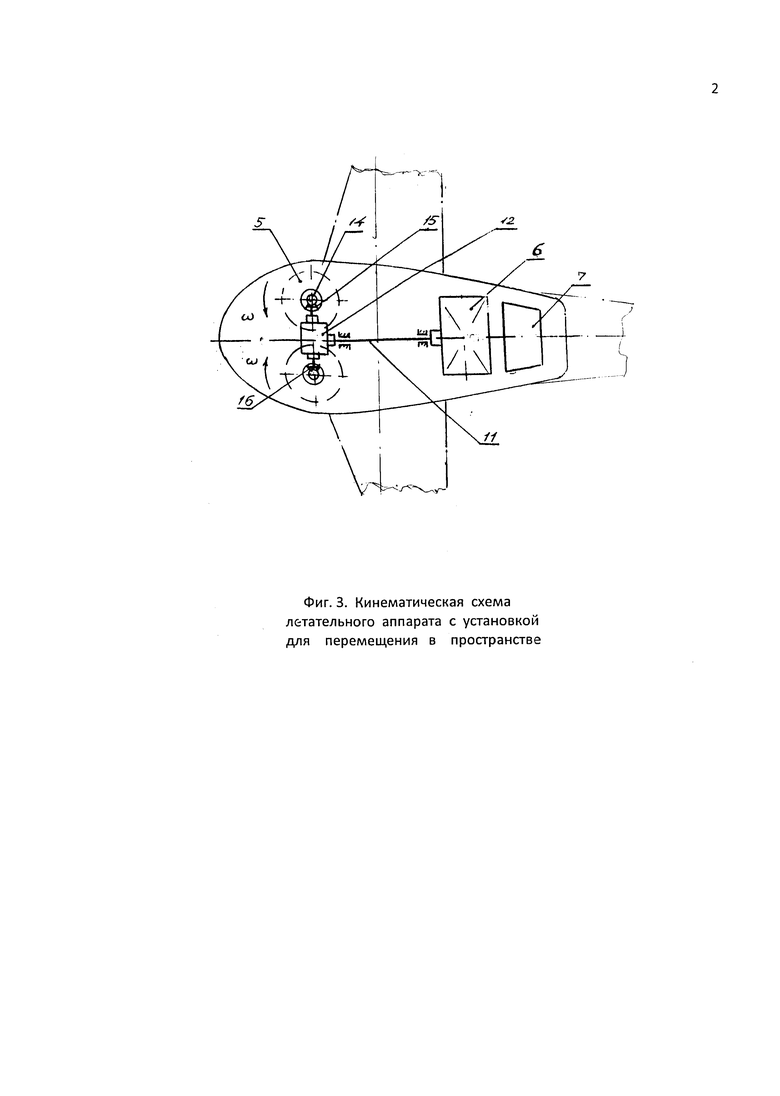
Представленная на фиг. 3 кинематическая схема показывает процесс передачи кинетической энергии вала вращения 11 установке 5, через редуктор 12.
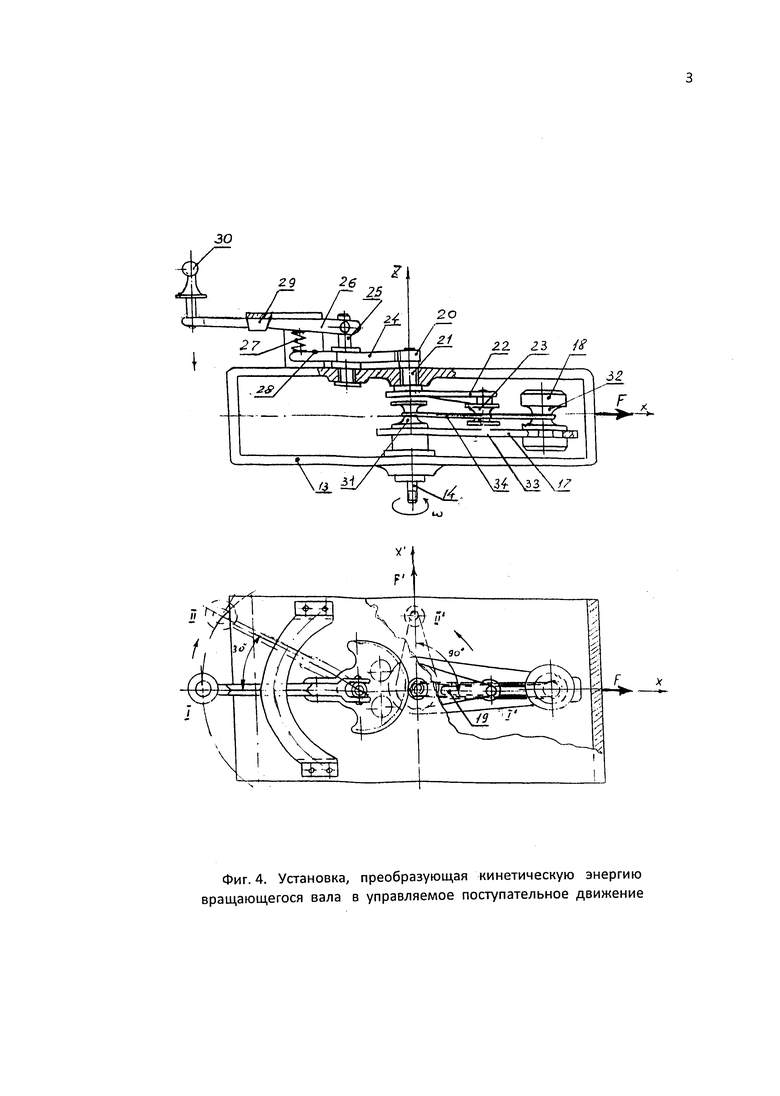
Представленная на фиг. 4 установка 5, преобразующая энергию вала 11 (фиг. 3), содержит корпус 13, вал вращения 14, воспринимающий крутящий момент от вала вращения 11 через редуктор 12 и конические пары 15 и 16 (фиг. 3), рычаг 17, жестко закрепленный на валу вращения 14, груз 18, свободно перемещающийся в прорези 19 рычага 17, ведомую шестерню 20, жестко посаженную на ось вращения 21, которая размещена в корпусе 13. К другому концу оси вращения 21 ведомой шестерни 20 жестко прикреплена управляемая пластина 22, второй конец которой неподвижно соединен с пульсатором 23. Ведомая шестерня 20 входит в зацепление с ведущей шестерней 24, ось вращения которой одним концом расположена в корпусе 13, а другим жестко связана с рукояткой 26, подпружиненной пружиной 27. Ведущая шестерня 24 имеет опорную площадку 28, на которую одним концом упирается пружина 27, а ее второй конец подпружинивает рукоятку 26. Последняя перемещается в фиксаторе 29 с возможностью фиксации в каком-либо положении. На конце рукоятки 26 укреплена ручка 30. Вал вращения 14, груз 18 и пульсатор 23 имеют выточки соответственно 31, 32, 33, в которых размещена гибкая связь 34. Выточки 31, 32, 33 расположены в одной плоскости, а оси вала вращения 14, груза 18 и пульсатора 23 - параллельно.
Для вращения вала 11 (фиг. 3) могут быть использованы различные источники энергии. Например, двигатели внутреннего сгорания, газотурбинные двигатели, силовые установки, работающие на ядерном топливе, от аккумуляторов солнечных батарей и т.п. В зависимости от используемой силовой установки и сферы применения летательного аппарата определяется его форма и компоновочная схема, а также установка взлетно-посадочных устройств.
Движение аппарата обеспечивается установкой 5, представленной на фиг. 4. К валу вращения 14 жестко прикреплен рычаг 17, на котором перемещается груз 18 в прорези 19. Кроме того, имеется пульсатор 23, который закреплен на одном конце управляемой пластины 22. На валу вращения 14, а также на грузе 18 и пульсаторе 23 имеются расположенные в одной плоскости выточки соответственно 31, 32, 33, в которых размещена гибкая связь 34. При вращении вала 14 вращается рычаг 17, а вместе с ним груз 18. Груз 18 свободно перемещается в прорези 19 рычага 17 и под действием центробежной силы натягивает кольцевую гибкую связь 34, которая при каждом обороте рычага 17 сталкивается с пульсатором 23. В результате преобразования сил, действующих на гибкую связь 34, груз 18 и вал 14, гибкая связь передает импульсы силы корпусу 13 установки, жестко закрепленному в фюзеляже 1, используя груз 18 как «мгновенный» неподвижный блок, удерживаемый силой инерции FИ.
Для подачи импульсов силы в нужном направлении управляемая пластина 22 вращается на оси вращения 21 ведомой шестерни 20, входящей в зацепление с ведущей шестерней 24. Поворот ведущей шестерни 24 осуществляется рукояткой 26 с ручкой 30. Рукоятка 26 неподвижно укреплена на оси вращения 25 ведущей шестерни 24, кроме того, размещена в фиксаторе 29 и подпружинена одним концом пружины 27. Второй конец пружины 27 закреплен на опорной площадке 28 ведущей шестерни 24. Передвижение ручки 30 с рукояткой 26 по цепочке - ведущая шестерня 24, ведомая шестерня 20, ось вращения 21, управляемая пластина 22 - передается пульсатору 23 и этим изменяется направление импульсов силы тяги, а, следовательно, и направление движения аппарата.
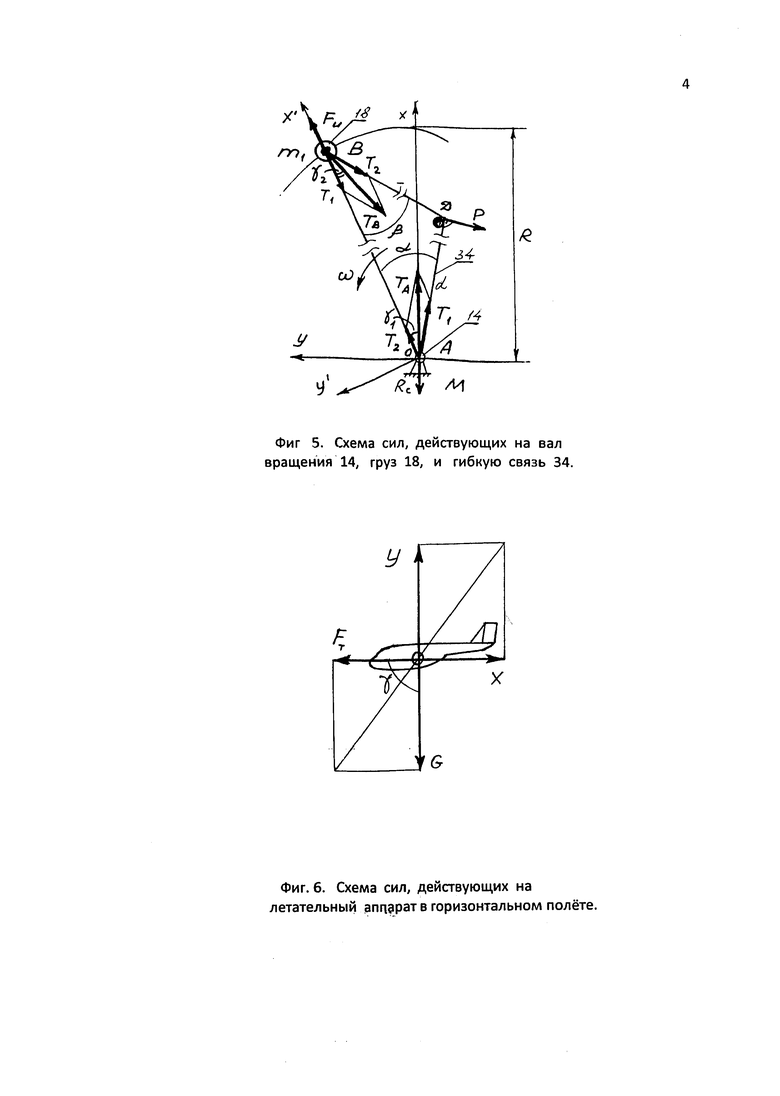
Представленная на фиг. 5 схема показывает какие силы действуют на груз 18, гибкую связь 34 и вал 14 установки при работе.
При каждом обороте рычага с грузом гибкая связь 34 передает через вал вращения 14 и корпус установки 13 импульс силы на фюзеляж.
Сила единичного импульса составляет:
FT=ТА+(FИ-TBCosγ2)Cosγ1,
где ТА - сила действия гибкой связи на вал установки,
TB - сила действия гибкой связи на груз,
FИ - сила инерции подвижного груза массой m1 (FИ=m1ω2R),
γ1 - угол, определяющий положение вектора силы ТА (в подвижной системе координат),
γ2 - угол, определяющий положение вектора силы ТB.
Формула связывает все основные параметры установки 5 и является основным уравнением при расчете динамических характеристик аппарата. Сила тяги FT зависит от угловой скорости вращающегося рычага 17 и при соответствующей мощности двигателя 6, передаваемой валу вращения 11, может достигать значительных величин.
Максимальное значение силы импульса FT достигается при наибольшем удалении груза от оси вращения вала 14 в направлении оси движения аппарата (R=RMAX), когда γ1=0 (фиг. 5). При этом сила реакции на фюзеляж от взаимодействия пульсатора с гибкой связью будет перпендикулярна оси х (направлению движения) и уравновешиваться второй установкой с обратным направлением вращения вала 14, исключая боковые вибрации аппарата.
С уменьшением угла γ1 сокращается время действия силы импульса (t). Поэтому оптимальное значение угла γ1 следует принимать в пределах 18-22°.
Потребная сила тяги установки (Fт n) для уравновешивания действующих на нее сил сопротивления по принципу Даламбера (FT-RФ-RС)=0 составляет:
Fт n=RФ+RС,
где RФ - сила реакции фюзеляжа на установку,
RС - сила аэродинамического сопротивления.
Сила реакции RФ (сила инерции) определяется по формуле:
RФ=Ма,
где М - масса фюзеляжа,
а - ускорение.
Сила аэродинамического сопротивления RС пропорциональна плотности воздуха, площади аппарата, квадрату скорости и определяется по формуле:
RС=CX(ρV2/2)SM,
где СX - аэродинамический коэффициент сопротивления,
ρ - плотность воздуха,
V2/2 - скоростной напор - объемная плотность кинетической энергии набегающего потока,
SM - площадь проекции летательного аппарата на плоскость, перпендикулярную направлению движения (площадь Миделя).
С увеличением оборотов установки и достижении «пороговых» значений частоты вращения вала 14 механическая система «установка - фюзеляж» выходит из состояния динамического равновесия (FT>Fт n) и совершает ускоренное движение.
При этом движущая сила (F) установки составит:
F=FT-Fт n.
Движущая сила летательного аппарата (FЛА) устанавливается с учетом его назначения и условий эксплуатации по второму основному закону механики:
FЛА=Ma,
где М - масса летательного аппарата,
а - ускорение.
По заданному значению движущей силы проектируется установка с силой тяги, определяемой по формуле:
FT=FЛА+Fт n.
Подъемная сила Y определяется по формуле:
Y=CY(ρV2/2)S,
где ρ - плотность воздуха,
S - площадь крыла,
CY - аэродинамический коэффициент подъемной силы,
V2/2 - скоростной напор.
Аэродинамические коэффициенты СX и CY зависят от формы летательного аппарата и его ориентации при движении и определяются экспериментально.
Скорость движения определяется согласно теореме об изменении количества движения по зависимости:
M(V-VO)=ΣFt,
где М - масса летательного аппарата,
VO - начальная скорость,
V - конечная скорость,
ΣFt - суммарный импульс силы.
Потребная мощность летательного аппарата при максимальной угловой скорости рычага 17 (ωMAX) и соответствующим ей значением окружной силы РMAX составит
N=РMAXdωMAX,
где d - плечо пульсатора - расстояние от оси вала вращения 14 до оси пульсатора 23.
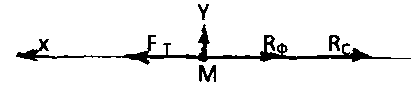
Направление движения летательного аппарата определяется вектором тяги FT установки. Управление вектором FT заключается в передвижении пульсатора 23 относительно оси вала вращения 14 в положение, соответствующее заданному движению аппарата (фиг. 4). Поворот пульсатора 23 осуществляется ручкой 30 через рукоятку 26. При нажатии ручкой 30 подпружиненной рукоятки 26 она выходит из зацепления в фиксаторе 29 и при дальнейшем повороте ручкой 30 рукоятки 26 поворачивается на оси вращения 25 ведущей шестерни 24.
Одновременно поворачивается ведомая шестерня 20 на своей оси вращения 21, а вместе с осью вращения 21 поворачивается управляемая пластина 22 вместе с пульсатором 23. Пульсатор 23 занимает заданное положение, а рукоятка 26 под действием пружины 27 закрепляется в фиксаторе 29. Этим исключается самопроизвольное перемещение рукоятки 26.
Если иметь соотношение количества зубьев ведущей шестерни 24 к ведомой шестерни 20 как 3:1, то при повороте рукоятки 26 на 60° пульсатор 23 перемещается на 180° и вектор тяги меняет свое направление на противоположное. Это приводит к торможению летательного аппарата.
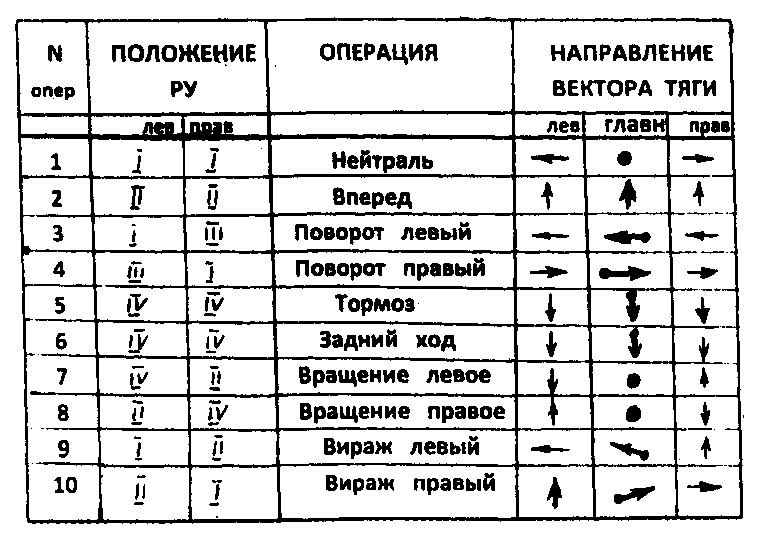
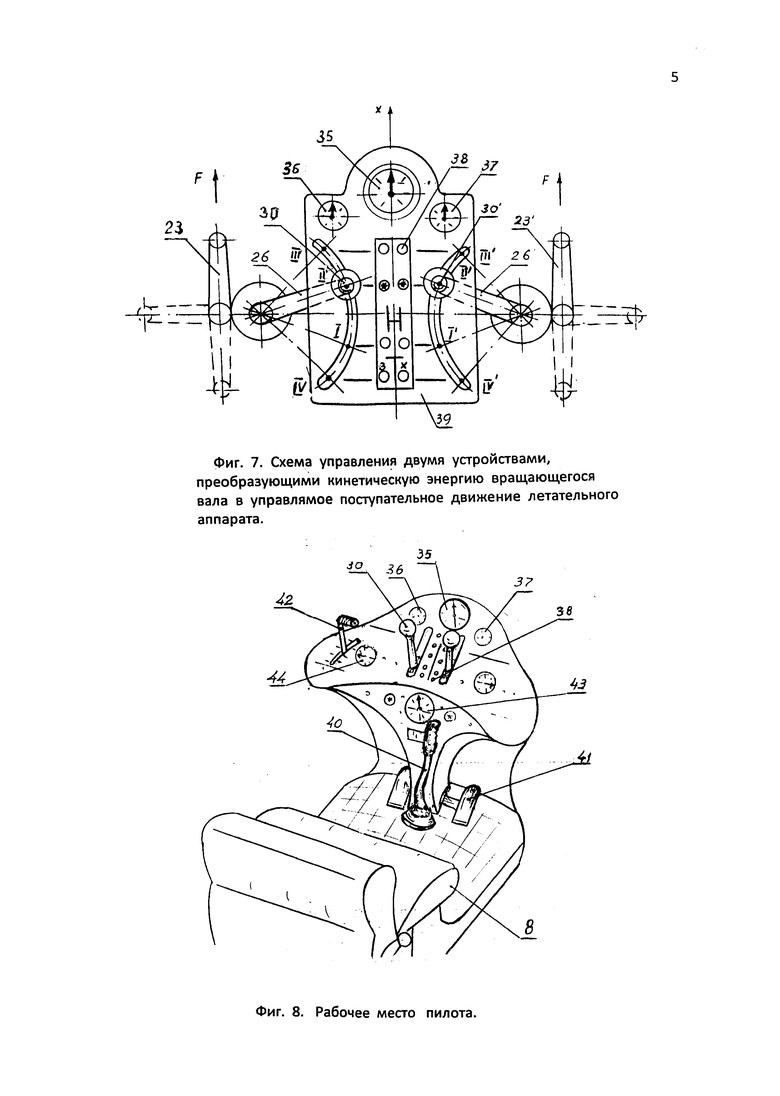
При наличии на аппарате двух установок 5 управление осуществляется каждой установкой (фиг. 7), что значительно расширяет возможности маневрирования. Контроль положения вектора тяги производится по прибору 35, показывающему суммарный вектор тяги, а также по приборам 36 и 37 векторов тяги соответственно левой и правой установки.
Положение пульсаторов может определяться световыми индикаторами 38 на щитке приборов 39.
Для управления аппаратом используются также и аэродинамические элементы конструкции самолета - руль высоты, рули направления, элероны (фиг. 1) по конструктивным схемам, принятым в современном авиастроении. Управление рулем высоты (стабилизатором) и элеронами осуществляется ручкой управления 40, установленной на рабочем месте пилота, рулями направления - ножными педалями 41 (фиг. 8).
Рабочее место пилота 8 выполняется с соблюдением всех эргономических требований и в зависимости от конкретного назначения и сферы применения аппарата оснащается необходимыми средствами жизнеобеспечения, аэронавигационным оборудованием и приборами.
Величина силы тяги FT регулируется изменением оборотов вала вращения 11 ручкой управления 42. Контроль оборотов вала вращения 14 осуществляется по прибору 43, контроль работы двигателя - по прибору 44.
Для наглядности ниже приводится в виде таблицы зависимость направления векторов тяги от положения рукояток 26 на установках.
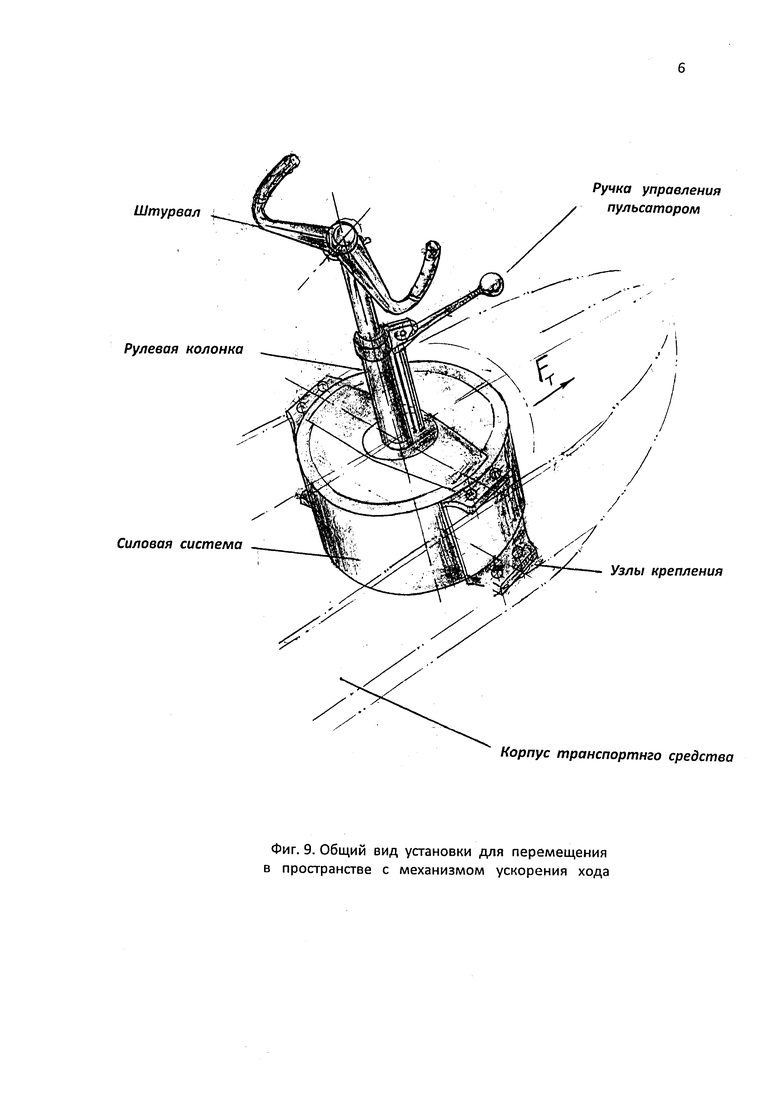
При длительных полетах и оснащении на поверхности летательного аппарата солнечных батарей для питания электродвигателей можно использовать установку с механизмом ускорения хода [3], общий вид которой показан на фиг. 9. Установка (фиг. 10) с двумя соосными ведущими валами (14, 14А), вращающимися в противоположных направлениях, электродвигателями 45 и параллелограмным механизмом ускорения хода 46 (фиг. 11) обеспечивает ускоренное поступательное движение и компактна.
Заявленный аппарат, исключающий возможность столкновения силовой установки с посторонними предметами в воздухе, может стать незаменимым средством для перевозки людей и грузов в сложных атмосферных условиях.
Принятые обозначения
1. Корпус.
2. Несущее крыло.
3. Хвостовое оперение.
4. Хвостовая балка.
5. Устройство, преобразующее кинетическую энергию.
6. Силовая установка.
7. Топливный бак.
8. Место пилота.
9. Место пассажира.
10. Пульт управления.
11. Вал вращения силовой установки 6.
12. Редуктор.
13. Корпус устройства 5.
14. Вал вращения устройства 5.
15, 16. Коническая передача.
17. Рычаг.
18. Груз.
19. Прорезь рычага 17.
20. Ведомая шестерня.
21. Ось вращения ведомой шестерни.
22. Управляемая пластина.
23. Пульсатор.
24. Ведущая шестерня.
25. Ось вращения ведущей шестернию
26. Рукоятка.
27. Пружина.
28. Опорная площадка для пружины.
29. Фиксатор.
30. Ручка.
31, 32, 33. Выточки соответственно на валу вращения 11, грузе 18 и пульсаторе 23.
34. Гибкая связь.
35. Прибор указателя суммарного вектора тяги.
36. Прибор указателя вектора тяги левого устройства 5.
37. Прибор указателя вектора тяги правого устройства 5.
38. Световой индикатор.
39. Щиток приборов.
40. Ручка управления стабилизатором и элеронами.
41. Педали управления рулем направления.
42. Ручка управления силовой установкой 6.
43. Прибор указателя оборотов вала вращения 14 устройства 5.
44. Прибор отражающий работу силовой установки 6.
45. Электродвигатель.
46. Параллелограмный механизм.
Источники информации
1. RU 2408808 C1, МПК F16H 19/00.
2. RU 000230541 С2, МПК B60F 5/00.
3. FR 2848147 A1, МПК B60F 5/00.
Летательный аппарат с силовой установкой для перемещения в воздушном пространстве содержит закрытый, обтекаемый фюзеляж, оснащенный несущим крылом, хвостовым оперением и взлетно-посадочным устройством. В фюзеляже размещена силовая установка, преобразующая энергию вращающегося вала двигателя в кинетическую энергию поступательного движения фюзеляжа. Изобретение направлено на защиту двигателя от попадания посторонних предметов. 13 ил., 1 табл.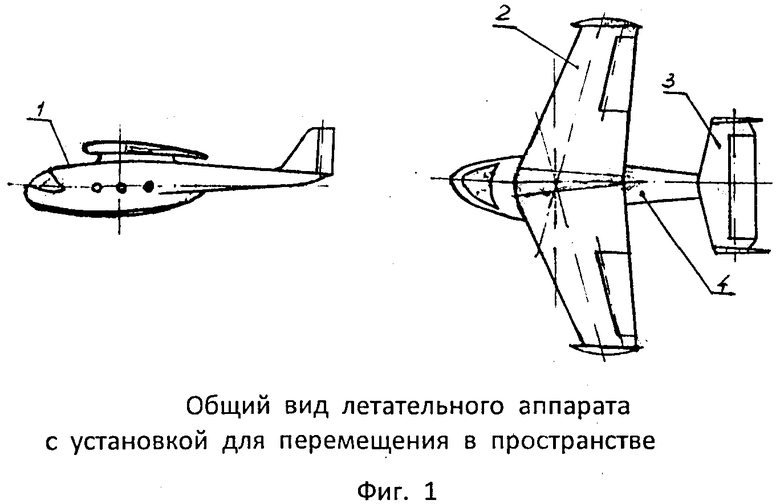
Летательный аппарат с силовой установкой для перемещения в воздушном пространстве, отличающийся тем, что в закрытом, обтекаемом фюзеляже, оснащенном несущим крылом, хвостовым оперением и взлетно-посадочным устройством, размещена силовая установка, преобразующая энергию вращающегося вала в кинетическую энергию поступательного движения фюзеляжа.
| Сдвоенный трехобкладочный защитный бумажный конденсатор с фольгой в качестве обмоток | 1949 |
|
SU83485A1 |
| Электрическое сопротивление для нагревательных приборов и нагревательный элемент для этих приборов | 1922 |
|
SU1997A1 |
| JP 2005080345 A, 24.03.2005. | |||

