Изобретение относится к средствам, преобразующим для перемещения в пространстве кинетическую энергию вращающегося вала в поступательное движение устройства путем использования сил инерции массы груза, вращающегося вместе с валом. Такие устройства способны передвигаться по поверхности различных сред, в воде и в воздухе. Из уровня техники известны различные технические решения, в которых описаны устройства, преобразующие один вид энергии в другой.
Сравнительно недавно стал известен патент, в котором описан способ и устройство преобразования кинетической энергии вращающегося вала в поступательное движение корпуса транспортного средства путем использования сил инерции массы груза, вращающегося вместе с валом [1]. Такие устройства для перемещения в пространстве могут быть выполнены в различной форме и виде: транспортного средства на колесах, на поверхностях скольжения, в виде летающей тарелки и т.п. [2], [3].
Наиболее близким к заявленному изобретению и принятому за прототип является устройство для перемещения в пространстве, преобразующее кинетическую энергию вращающегося вала в управляемое поступательное движение транспортного средства [2]. Это устройство содержит в корпусе вал вращения, на котором жестко закреплен рычаг со свободно перемещающимся на нем грузом, удерживаемым кольцевой гибкой связью, передающей импульсы энергии корпусу в результате преобразования сил взаимодействия ее с пульсатором и грузом. Изменением положения пульсатора относительно оси вала вращения устройству придают направленное перемещение в пространстве.
Данное устройство требует дальнейшего совершенствования в части обеспечения эксплуатационной надежности кольцевой гибкой связи, плавности хода и повышения скорости поступательного движения. В этой связи была поставлена техническая задача разработать и создать устройство, в котором бы решалась задача преобразования энергии вращающегося вала в поступательное движение более плавно, с большим эффектом преобразования одного вида энергии в другой.
Кроме того, ставилась задача расширить диапазон изменения скорости поступательного движения, повысить силу тяги и обеспечить высокую эксплуатационную надежность основных подвижных элементов конструкции.
Решение этой задачи отражено в заявляемом изобретении «Установка для перемещения в пространстве с ускорителем хода, преобразующая кинетическую энергию вращающегося вала в поступательное движение».
Сущность заявляемого устройства представлена на графических материалах и фотографиях.
На фиг.1 представлен общий вид установки с ускорителем хода;
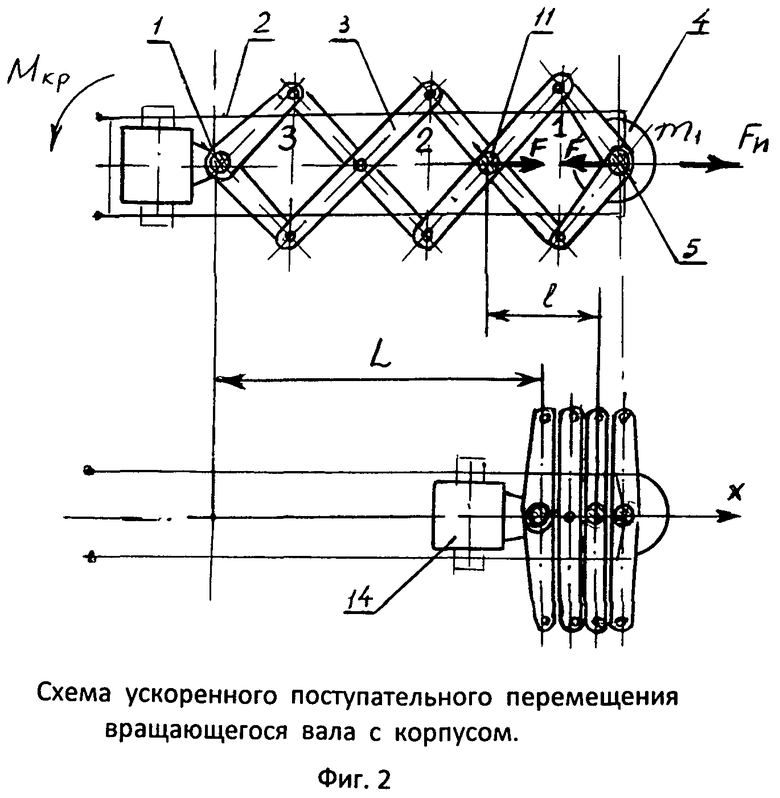
на фиг.2 - схема поступательного перемещения вращающегося вала при сжатии параллелограмного механизма ускорения к оси груза;
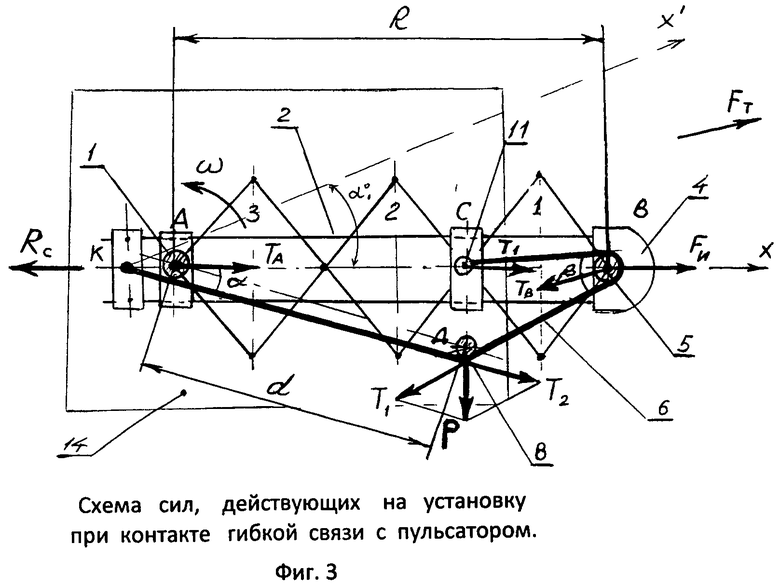
на фиг.3 - схема сил, действующих на установку в момент столкновения гибкой связи с пульсатором;
на фиг.4 - общий вид действующей модели установки на открытой перемещающейся платформе;
на фиг.5 - действующая модель транспортного средства с установкой ускоренного хода на гладких опорах.
Представленная на фиг.1 установка для перемещения в пространстве содержит корпус 14 с размещенным в нем валом вращения 1, рычаг 2 с четырьмя гладкими стержнями, свободно перемещающийся перпендикулярно валу вращения в прорезях кронштейна 9, жестко закрепленного на валу 1, параллелограмный механизм 3, состоящий из трех секций, шарнирно укрепленный одним концом на валу 1, другим - на оси 5 груза 4, жестко закрепленного на конце рычага 2, два пульсатора 8, установленных на корпусе 14 с возможностью их перемещения относительно оси вала вращения 1 для изменения направления силы тяги. Ось 11 параллелограмного механизма 3 установлена в двух ползунах 7, свободно перемещающихся по стержням рычага 2. На выступах 15 соединительного кронштейна 10, установленного на рычаге 2, одним концом закреплены параллельные нити гибкой связи 6. Другие концы гибкой связи, охватывая пульсаторы 8 и ролики 13 на оси 5 груза 4, жестко закреплены на концах оси 11 секции параллелограмного механизма 3. Оси пульсаторов 8, роликов 13 и ведущего вала 1 - параллельны.
Представленная на фиг.2 схема работы механизма 3 раскрывает процесс ускорения поступательного движения корпуса 14 установки.
Представленная на фиг.3 схема действия сил при работе установки обосновывает процесс преобразования кинетической энергии вращения вала 1 в ускоренное поступательное движение корпуса 14 установки.
На фиг.4 представлена действующая модель установки с механизмом ускорения хода.
На фиг.5 представлена действующая модель транспортного средства с установкой, преобразующей кинетическую энергию вращающегося вала в ускоренное поступательное движение, на трех гладких опорах.
Установка, преобразующая кинетическую энергию вращающегося вала в ускоренное поступательное движение работает следующим образом.
Каким-либо способом (в заявленном изобретении не раскрывается) придают вращение валу 1 устройства (фиг.1), размещенному в корпусе 14.
При этом в качестве двигателей для вращения вала 1 могут использоваться как механизмы с устройствами внутреннего сгорания, так и работающие на ядерном топливе или от аккумуляторов, аккумулирующих энергию от солнечных батарей, и другие. Синхронно с валом вращения 1 вращается рычаг 2 с грузом 4, параллелограмным механизмом ускорения хода 3 и гибкой связью 6. Рычаг 2 может свободно перемещаться в прорезях кронштейна 9, жестко закрепленного на валу 1. Вращаясь с рычагом 2, механизм 3 и гибкая связь 6 находятся всегда в натянутом состоянии под действием силы инерции Fи, действующей на груз 4 массой m1.
При каждом обороте вала 1 гибкая связь 6, сталкиваясь с пульсатором 8, передает усилие T1 на ось 11 параллелограмного механизма 3, используя ролик 13 на оси 5 груза 4, как «неподвижный блок» (фиг.1).
Под действием силы T1 ось 11 перемещается на расстояние l к оси 5 груза 4, удерживаемого силой инерции Fи, что приводит к сжатию параллелограмного механизма и поступательному перемещению вала 1 с корпусом 14 на расстояние L (фиг.2). Расстояние хода L находится в прямой зависимости от количества секций параллелограмного механизма 3 и при достаточной мощности вала может достигать значительных величин:
L=k·l,
где k - число секций,
l - перемещение оси 11 первой секции (фиг.2).
От числа секций зависит, соответственно, и скорость перемещения установки, так как промежуток времени движения всех осей параллелограмного механизма один и тот же:
V=k·v,
где v - скорость движения оси 11.
Сила натяжения нити гибкой связи T2, прикрепленной к выступу 15 кронштейна 10 (точка K, фиг.3), создает дополнительную силу движения установки, воздействуя через рычаг 2 на груз 4 в положительном направлении координатной оси Х:
T2X=T2 Cosα.
Усилие TA (фиг.3), возникающее на оси третьей секции (вал 1) механизма 3, также зависит от количества секций и находится в обратно пропорциональной зависимости. С учетом двух нитей гибкой связи сила TA определяется по формуле:

Силы натяжения нити гибкой связи T1 и T2 (фиг.3) определяются по следующим формулам:
где P - сила, действующая на нить гибкой связи в момент столкновения с пульсатором 8, определяемая по формуле P=MКР/d, где d - плечо пульсатора 8 (фиг.3).
Тогда
Следовательно, силу TA, передаваемую параллелограмным механизмом 3 вращающемуся валу 1 при столкновении нитей гибкой связи с пульсатором, следует определять по формуле:

Действие гибкой связи 6 на ролик 13 при столкновении с пульсатором 8 вызывает реакцию опоры TB (фиг.3), которая зависит от силы натяжения гибкой связи T1, угла α°, определяющего направление нити, а также от внешней силы сопротивления RC, препятствующей свободному перемещению установки в пространстве.
Сила TB определяется как векторная сумма этих величин по формуле:
Сила сопротивления RC определяется известными методами в зависимости от назначения установки и сферы ее применения на транспортном средстве. При трогании с места по поверхности следует определять силу трения покоя, применяя статический коэффициент трения. При движении в сплошной воздушной или водной среде необходимо определять силу аэродинамического или гидродинамического сопротивления, так как в этом случае сила сопротивления зависит от скорости движения устройства.
Динамическое равновесие всех активных сил, действующих на заявленную установку относительно координатной оси X, совпадающей с направлением движения корпуса 14, определяется по принципу Даламбера и достигается при условии:

TA=RC
Так как сила инерции Fи=m1ω2R=2(T1-T2Cosα)+RC, то пороговое значение угловой скорости вращения вала 1 выражается формулой

пороговая частота вращения -

где R - расстояние от оси вращающегося вала 1 до оси 5 груза 4 (фиг.3).
С увеличением угловой скорости (ωп) вала 1, с рычагом 2, механизмом 3 и грузом 4, условие динамического равновесия будет нарушено и корпус 14 изменит свое положение, так как получит от вала 1 поступательное движение.
С дальнейшим увеличением скорости вращения вала 1 происходит изменение соотношений действующих на корпус 14 сил и установка выходит из состояния динамического равновесия:
Fи≥2(T1-T2Cosα)+RC
TA>RC.
Вектор силы тяги FT устройства совпадает с направлением действия силы TA и силы инерции Fи и определяется по формуле:
FT=TA+Fи+2T2Cosα-2TBCosγ,
где γ - угол отклонения вектора TB от координатной оси X.
Сила тяги установки, при соответствующей мощности вала 1, может достигать значительных величин. Если сила тяги превышает силу сопротивления движению корпуса установки (FT>RC), то создается движущая сила F, которая и приводит устройство в поступательное движение:
F=FT-RC.
При определении динамических характеристик заявленной установки следует учитывать, что движущая сила действует на установку импульсивно, в зависимости от частоты вращения вала 1.
Интенсивность действия движущей силы (k) определяется числом столкновений гибкой связи 6 с пульсатором 8 в единицу времени:
Продолжительность действия импульса зависит от угла поворота рычага 2 (α) (фиг.3) и частоты вращения:
Тогда элементарный импульс движущей силы составит:
ΔS=F·τ,
который при равномерном вращении рычага 2 (ω=const, ε=0) является величиной постоянной. Поэтому суммарный импульс за некоторый промежуток времени t определится как произведение элементарного импульса ΔS на число столкновений гибкой связи с пульсатором:
∑S=ΔSkt.
Передача гибкой связью импульса силы ΔS корпусу установки происходит мгновенно, продолжительностью τ=0,0201÷0,0015 с при оборотах вала 1 n=230÷3000 об/мин. За это время рычаг 2 с грузом 4 и механизмом 3 перемещается по относительной траектории всего на угол α=0,1°÷28°, что делает ход установки более плавным и бесшумным.
Скорость движения установки определяется согласно теореме об изменении количества движения по зависимости:
M(V-VO)=∑S,
где М - масса устройства
V - начальная скорость
V - конечная скорость
∑S - суммарный импульс.
Потребная мощность заявляемой установки определяется при максимальной угловой скорости рычага 2 (ωMAX) и соответствующим ей значением окружной силы (PMAX); действующей на пульсатор 8:
N=PMAXdωMAX.
При использовании установки на транспортных средствах или других объектах с источниками энергии для вращения вала, параметры силы тяги, скорости, потребной мощности и др. определяются с учетом полной массы объекта с полезным грузом и условий эксплуатации.
На фиг.4 представлена действующая модель установки на открытой перемещающейся платформе.
На фиг.5 представлена действующая модель транспортного средства с установкой, преобразующей кинетическую энергию вращающегося вала в ускоренное поступательное движение, на трех гладких опорах.
Источники информации
1. RU 2408808 C1, МПК F16H 19/00.
2. RU 2416048 C2, МПК F16H 19/00.
3. RU 2411139 C1, МПК В60Г 5/00.
Перечень обозначений, принятых в заявке
1. Вал вращения.
2. Рычаг.
3. Механизм ускорения хода.
4. Груз.
5. Ось груза.
6. Гибкая связь.
7. Ползун.
8. Пульсатор.
9. Кронштейн с прорезями.
10. Соединительный кронштейн.
11. Ось первой секции механизма 3.
12. Кронштейн.
13. Ролик.
14. Корпус.
15. Выступ кронштейна 10.

Изобретение относится к устройствам, преобразующим энергию вращающегося вала установки в поступательное движение корпуса установки по поверхности. Устройство включает корпус, в котором размещены вал вращения с закрепленным рычагом с грузом, параллелограмный механизм ускорения хода, два пульсатора и гибкая связь. Упомянутый механизм ускорения шарнирно закреплен одним концом на оси вала вращения, а другим - на оси груза. Гибкая связь охватывает пульсаторы и ролики груза, при этом закреплена одним концом на вращающемся рычаге, а другим - на оси механизма ускорения. Технический результат - расширение диапазона изменения скорости движения и повышение надежности устройства. 5 ил.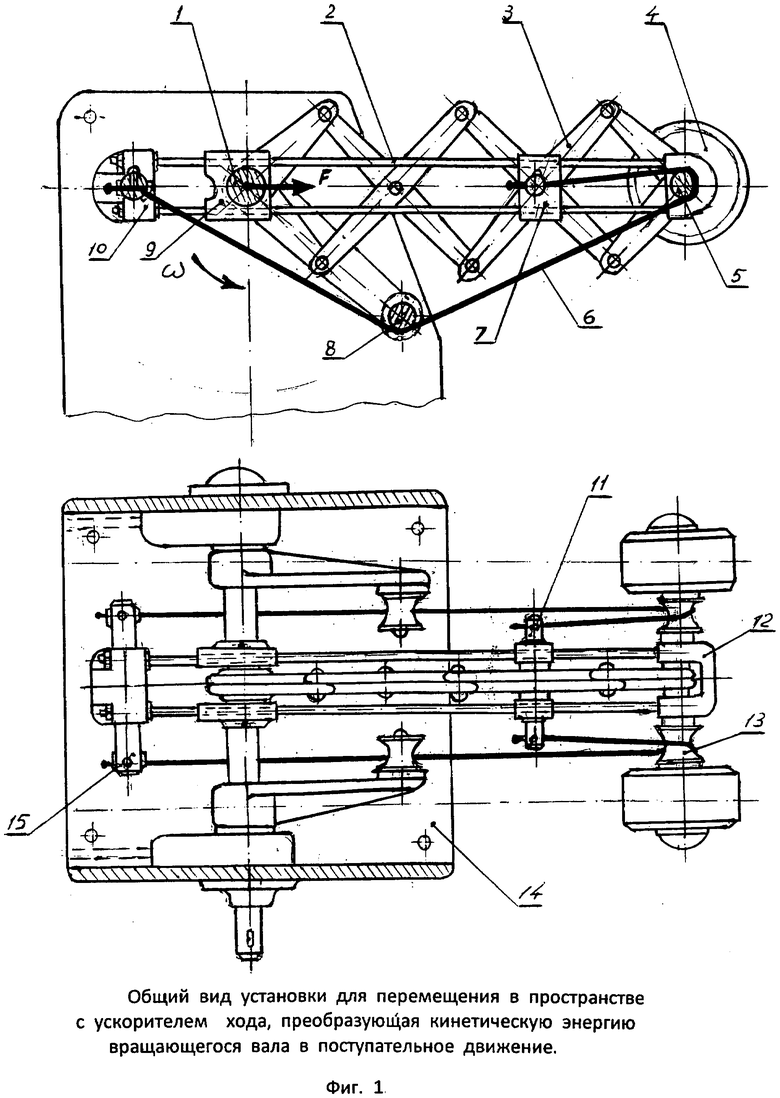
Установка для перемещения в пространстве, преобразующая кинетическую энергию вращающегося вала в ускоренное поступательное движение корпуса по поверхности, содержащая корпус, размещенный в нем вал вращения с закрепленным перпендикулярно подвижным рычагом с грузом и механизмом ускорения хода, два пульсатора, гибкую связь, отличающаяся тем, что установка дополнительно содержит механизм ускорения хода, преобразующий силу действия гибкой связи в силу тяги установки, с шарнирно соединенными между собой параллелограмными секциями, перемещающимися по гладким стержням рычага, и шарнирно укрепленный одним концом на валу вращения, другим - на оси груза, гибкую связь с двумя параллельными нитями конечной длины, закрепленными одним концом на вращающемся рычаге, другим - на оси секции механизма ускорения хода, охватывая при этом пульсаторы и ролики груза, оси которых расположены параллельно.
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ В ПРОСТРАНСТВЕ, ПРЕОБРАЗУЮЩЕЕ КИНЕТИЧЕСКУЮ ЭНЕРГИЮ ВРАЩАЮЩЕГОСЯ ВАЛА В УПРАВЛЯЕМОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ | 2009 |
|
RU2416048C2 |
| RU 2001115911 A, 10.06.2003 | |||
| ВИБРОДВИЖИТЕЛЬ С ПРЕОБРАЗОВАНИЕМ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2008 |
|
RU2387567C1 |

