Область техники, к которой относится изобретение
Изобретение относится к системе складывания, хранения и распределения корма на судах для перевозки большого количества животных.
Уровень техники
Как известно, в случаях, когда фермерское хозяйство для выращивания животных, таких как, например, овцы, крупный рогатый скот, верблюды, страусы, находится далеко от места использования или забоя, необходимо обеспечить их перевозку; используют большие суда при перевозке большого количества животных, плавание занимает несколько дней, также как пересечение морей и океанов.
Суда для перевозки скота получают из судов, предназначенных изначально для других целей пользования, а затем приспосабливают для такой перевозки, разделяя доступное пространство на стойла для размещения животных. На такие суда загружают большое количество корма на верхней палубе, чтобы соблюдать нормы кормления животных во время плавания. Во время судоходства корм, необходимый для кормления животных, берут из общей кучи и подают в отделения для животных, в основном вручную, например, при помощи тележек, используя при этом конвейеры и/или механические подъемники для выполнения специальных функций.
У систем, используемых в настоящее время для хранения и распределения корма для животных во время перевозки, есть проблема, требующая значительного количества рабочей силы с соответствующими высокими затратами для работы таких систем. Кроме того, у используемых систем - низкая надежность, в частности это касается:
- производительности в час;
- уверенности в соответствии периодическим нормам кормления животных, учитывая тот факт, что при кормлении животных только кормом, могут возникать значительные потери в весе;
- безопасности и устойчивости к атмосферным явлениям и погодным условиям;
- надежности против пожара и взрывов.
Раскрытие изобретения
Цель данного изобретения - решить вышеуказанные проблемы, обеспечив систему складывания, хранения и распределения корма на судах для перевозки большого количества животных, которая может работать полностью автоматически, сокращая или уменьшая, значительным образом, необходимую стоимость рабочей силы.
В рамках этой цели задача изобретения заключается в обеспечении системы с высокой точностью и надежностью в работе, особенно по отношению к производительности подаваемого корма в час и периодических интервалов подачи корма животным.
Другая задача изобретения заключается в обеспечении системы, которая в достаточной мере защищает корм от атмосферных воздействий.
Следующая задача изобретения заключается в обеспечении системы, при помощи которой можно осуществлять загрузку и, при необходимости, разгрузку корма автоматически.
Еще одна задача изобретения - обеспечение системы, которая не создает проблем баланса и устойчивости судна, на котором она установлена, даже при складывании и содержании большого количества корма.
Другая задача изобретения - обеспечение системы, которая позволяет получать корм обратно и хранить оставшийся корм, избегая при этом изменения и/или разрушения его питательных свойств.
Технические результаты, на достижение которых направлено заявляемое изобретение, заключаются в повышении точности и надежности работы системы, защите корма от атмосферных воздействий, улучшении условий хранения корма, возможности выполнения автоматической загрузки и разгрузки корма, повышении устойчивости судна.
Указанные технические результаты достигаются в системе для складывания, хранения и распределения корма на судах для перевозки большого количества животных, включающей:
- по меньшей мере, один бункер для хранения корма, расположенный на судне под палубой;
- устройства для автоматического забора корма из бункера для хранения, чтобы подавать его, по меньшей мере, в одну промежуточную зону, расположенную выше уровня отделений для кормления животных;
- устройства для автоматического распределения корма из вышеуказанной промежуточной зоны в отделения для кормления животных.
Краткое описание чертежей
Характеристики и преимущества изобретения можно увидеть на примере прилагаемых чертежей, где:
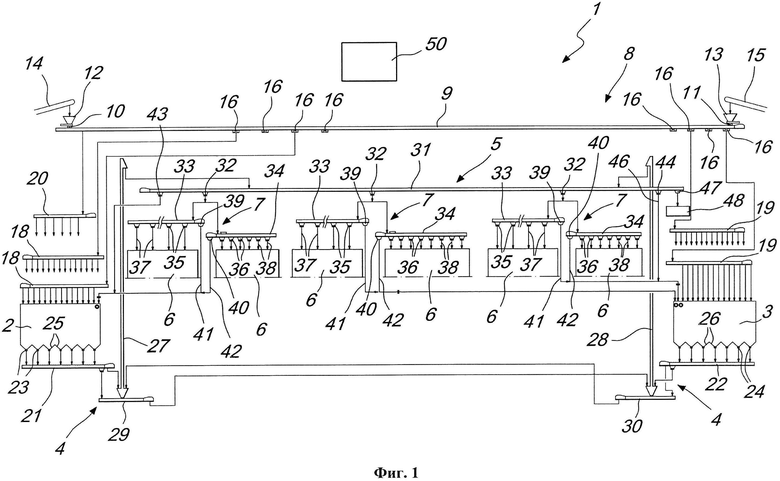
Фиг. 1 - блок-схема системы, согласно изобретению;
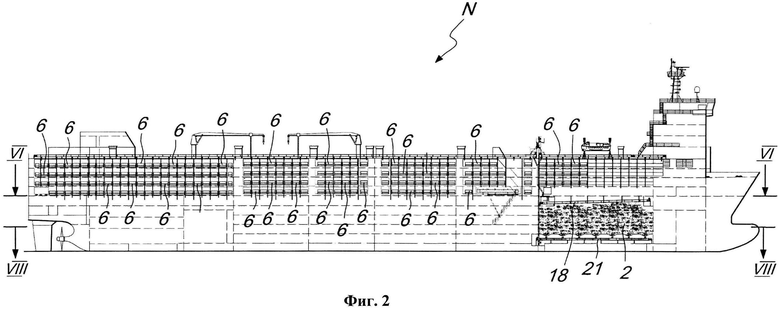
Фиг. 2 - частичный разрез по вертикальной плоскости судна, на котором установлена система, согласно изобретению;
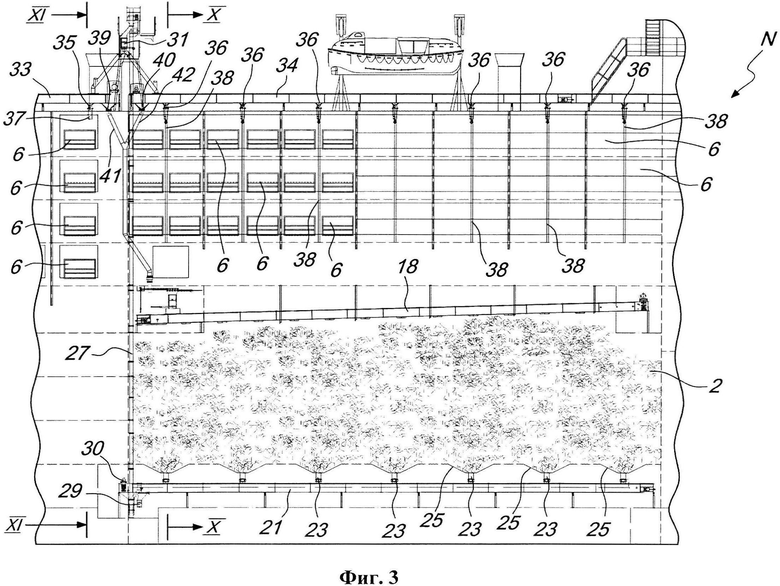
Фиг. 3 - вид детального чертежа Фиг. 2 в увеличенном масштабе;
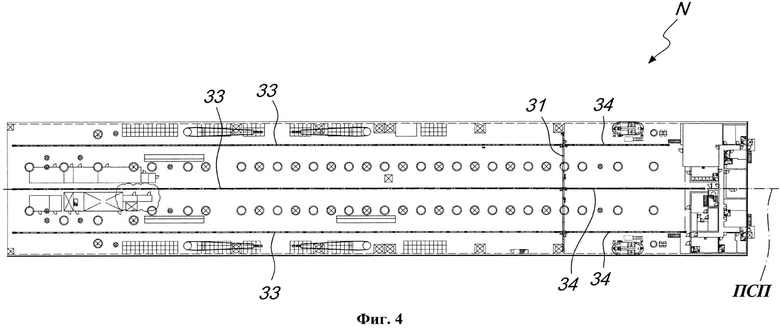
Фиг. 4 - вид Фиг. 2 сверху;
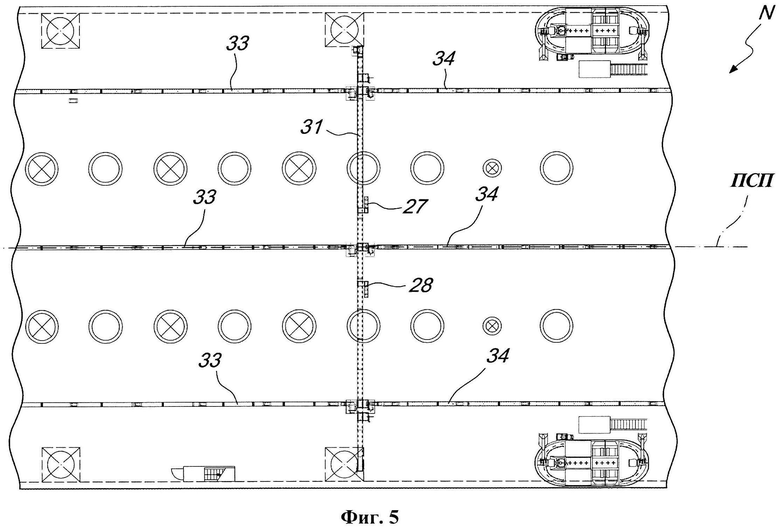
Фиг. 5 - вид детального чертежа Фиг. 4 в увеличенном масштабе;
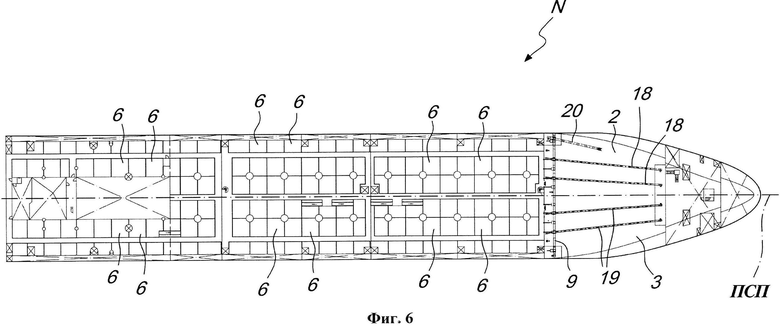
Фиг. 6 - схематический частичный разрез Фиг. 2 по линии VI-VI;
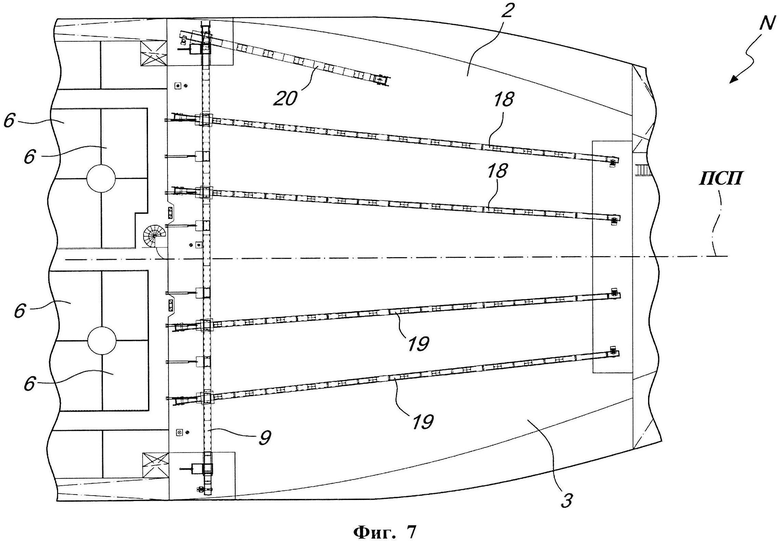
Фиг. 7 - вид детального чертежа Фиг. 6 в увеличенном масштабе;
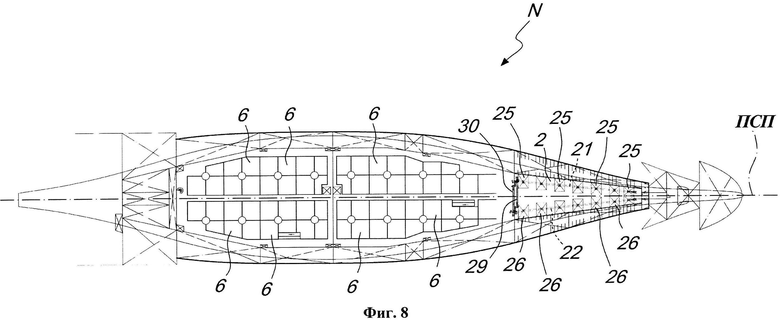
Фиг. 8 - схематический разрез Фиг. 2 по линии VIII-VIII;
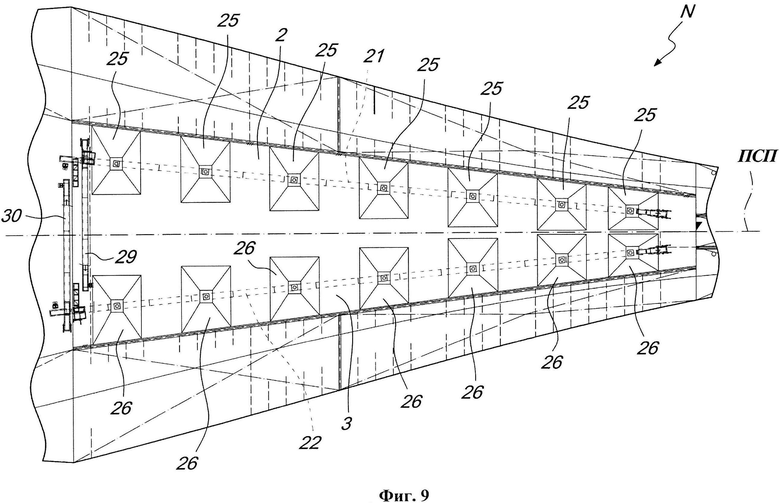
Фиг. 9 - вид детального чертежа Фиг. 8 в увеличенном масштабе;
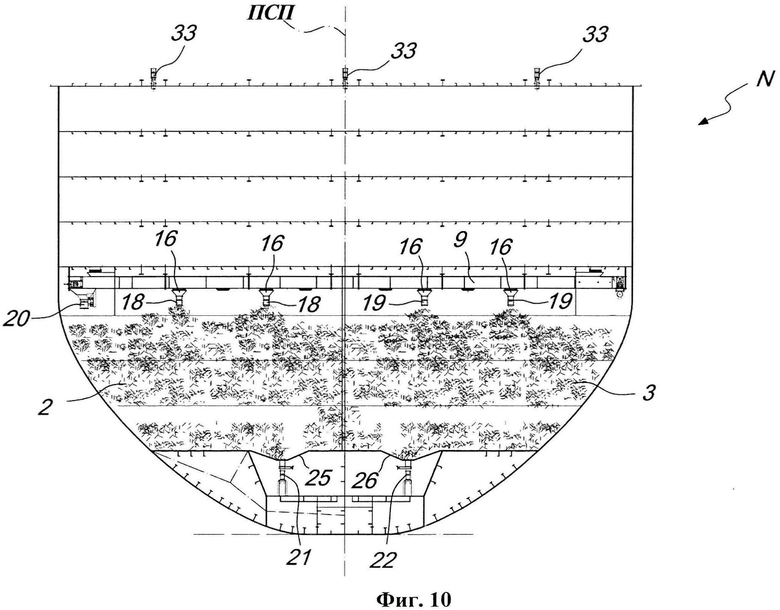
Фиг. 10 - схематический разрез Фиг. 3 по линии Х-Х;
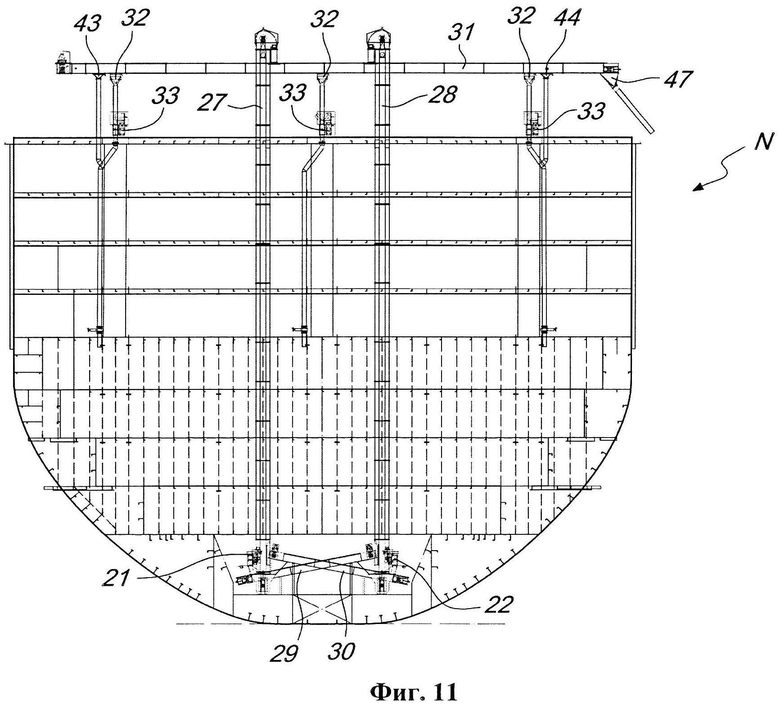
Фиг. 11 - схематический разрез Фиг. 3 по линии XI-XI;
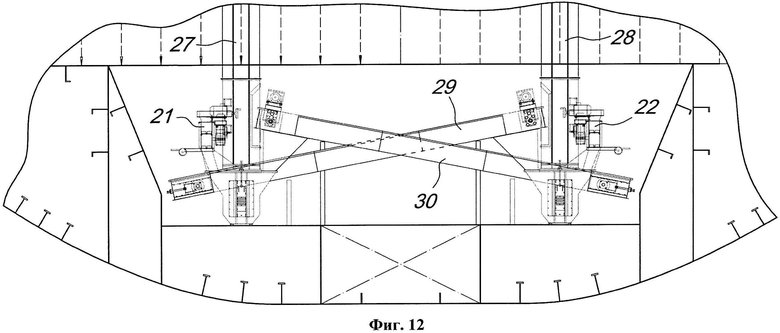
Фиг. 12 - вид детального чертежа Фиг. 11 в увеличенном масштабе.
Осуществление изобретения
Как показано на фигурах, система, согласно изобретению, обозначенная номером 1, включает, по меньшей мере, один бункер 2, 3 для хранения корма, расположенный на судне N под палубой.
Корм предпочтительно использовать в виде корма в гранулах, чтобы облегчить погрузочно-разгрузочные работы, уменьшая образование пыли во время проведения таких работ.
Предпочтительно использовать два бункера для хранения 2, 3, устанавливаемых для удобства в двух носовых частях судна N, расположенных симметрично по отношению к продольной средней плоскости (далее - ПСП) судна N, для того чтобы корм, загружаемый на судно N, можно было равномерно распределить.
Система 1 включает устройства 4 для автоматического забора корма из бункеров для хранения 2, 3, чтобы подавать его, по меньшей мере, в одну промежуточную зону 5, расположенную выше уровня отделений 6 для кормления животных.
Кроме того, система согласно изобретению включает устройства 7 для автоматического распределения корма из промежуточной зоны 5 в отделения 6 для кормления животных.
Для удобства система согласно изобретению включает также устройства 8 для автоматической загрузки корма в бункеры для хранения 2, 3, для того чтобы операции по загрузке корма в бункеры для хранения 2, 3 и последующее размещение корма в отделения 6 для животных осуществлялись полностью автоматически.
Предпочтительно, чтобы устройства для загрузки-разгрузки корма по системе, т.е. устройства 8 и/или устройства 4 и/или устройства 7, были оснащены цепными транспортерами и/или ковшовыми подъемниками, известного типа, как это подробно описано ниже.
Цепные транспортеры, которые могут быть использованы в системе, согласно изобретению, широко применяются в области транспортировки гранулированной и порошкообразной продукции (зерновые культуры, корма, грунты, пылевидный уголь, сахар, минералы и т.п.) и состоят из транспортного контейнера, длина которого изменяется в соответствии с необходимыми расстояниями перевозки и на дне которого скользит цепь, оснащенная траверсами, которые воздействуют на перевозимую продукцию, которая пересыпается в транспортный контейнер.
Траверсы, перемещаясь вперед по продольному удлинению транспортного контейнера, перемещают опорное основание продукта, заставляя весь вышележащий продукт перемещаться посредством физической характеристики угла естественного откоса самого продукта. При помощи цепных транспортеров продукт можно перемещать в один конец транспортного контейнера или разгружать в промежуточные зоны, сделав на дне транспортного контейнера разгрузочные отверстия, которые могут открываться и закрываться при помощи заслонок и/или клапанов, которые должны быть оснащены приводом и разнесены.
Ковшовые подъемники, которые могут использоваться в системе, согласно изобретению, широко применяются в области транспортировки гранулированной и порошкообразной продукции и оснащены парой роликов, один с приводом, а второй направляющий, с горизонтальными и параллельными осями, расположенными на разных уровнях высоты и связанными ремнем, две части которого расположены вертикально или наклонены. Ковши прикреплены к ремню и собирают продукт, двигая его по направлению с вертикальным компонентом и разгружая его, достигнув расположенного выше ролика.
Более подробно, устройства 8 для автоматической загрузки корма включают цепной загрузочный транспортер 9, расположенный поперечно по отношению к ПСП судна N на высшем уровне в отличие от уровня бункеров для хранения 2, 3. Загрузочный транспортер 9 расположен, с продольными концами, под разгрузочными отверстиями 10, 11, регулируемыми заслонками, приемных бункеров 12, 13, в которые можно насыпать корм, поступающий из транспортных средств известного типа, таких как, например, поезда, прицепы или другие корабли, расположенные вдоль судна N в пристани. Передача корма из этих транспортных средств в приемные бункера 12, 13 может осуществляться при помощи транспортеров 14, 15 известного типа, таких как, например, ленточных или шнековых транспортеров.
Приемные бункера 12, 13 расположены рядом с бортами судна N для облегчения загрузки корма.
Загрузочный транспортер 9 оснащен, в нисходящей части, разгрузочными отверстиями 16, разнесенными по продольному удлинению загрузочного транспортера 9, которые могут регулироваться заслонками с приводом. Через разгрузочные отверстия 16 осуществляется подача корма на цепные загрузочные транспортеры 18, 19, предназначенные для перемещения и распределения корма, при помощи некоторого количества разгрузочных отверстий, расположенных на определенном расстоянии по продольному удлинению загрузочных транспортеров 18, 19, в соответствующий бункер для хранения 2, 3.
Кроме загрузочных транспортеров 18, 19 предусмотрен, по меньшей мере, один запасной загрузочный транспортер 20, выполняющий функцию полного опустошения всех загрузочных транспортеров 18, 19, если максимальный уровень переполняет бункеры для хранения 2, 3 во время загрузки бункеров для хранения 2, 3, направляя оставшееся количество корма в соответствующую часть бункера, представленную, как показано на рисунке, бункером 2.
Устройства 4 для автоматического забора корма включают цепные разгрузочные транспортеры 21, 22, расположенные под бункерами для хранения 2, 3 возле выпускных отверстий 23, 24, установленные на дне соответствующего бункера для хранения 2, 3. В частности, дно бункеров для хранения 2, 3 разделено на участки в виде воронок 25, 26, каждый из которых направляет корм к одному из разгрузочных отверстий 23, 24, а регулировка каждого из разгрузочных отверстий осуществляется соответствующей заслонкой с приводом.
Разгрузочные транспортеры 21, 22 подают, по меньшей мере, один ковшовый подъемник 27, 28, предназначенный для разгрузки корма, вынимаемого из бункеров для хранения 2, 3 в промежуточную зону 5.
Как показано на примере осуществления данного изобретения, предусмотрено два ковшовых подъемника 27, 28, расположенных симметрично по отношению к ПСП судна N.
Между разгрузочными транспортерами 21, 22 и ковшовыми подъемниками 27, 28 предусмотрены обменные или перепускные транспортеры 29, 30 известного типа, которые могут включаться для перемещения корма из разгрузочных транспортеров 21, 22, вместо ковшевого подъемника 27 или 28, подаваемого разгрузочным транспортером 21 или 22, к другому ковшевому подъемнику 28 или 27, при наличии только одного ковшевого подъемника 27 или 28 в аварийных ситуациях или в случае технического обслуживания.
Ковшевые подъемники 27, 28 снабжают поперечный распределительный транспортер 31 цепного типа, расположенный, главным образом, горизонтально в промежуточной зоне 5 и направленный поперечно по отношению к ПСП судна N.
Поперечный распределительный транспортер 31 оснащен разгрузочными отверстиями 32, разнесенными по продольному удлинению поперечного распределительного транспортера 31 и регулируется заслонками с приводом.
Устройства 7 для автоматического размещения корма включают продольные распределительные транспортеры 33, 34 цепного типа, расположенные под поперечным распределительным транспортером 31 и направленные продольно по отношению к судну N. Подача на продольные распределительные транспортеры 33, 34 осуществляется поперечным распределительным транспортером 31 при помощи разгрузочных отверстий 32, регулируемых соответствующими заслонками с приводом.
В свою очередь, продольные распределительные транспортеры 33, 34 снабжают, при помощи разгрузочных портов 35, 36, разнесенных по продольному удлинению соответствующего продольного распределительного транспортера 33, 34 и регулируемых соответствующими заслонками с приводом, каналы 37, 38 для распределения корма под действием силы тяжести, которые ведут к кормушкам, расположенным в нескольких отделениях 6 для кормления животных. Отделения 6 расположены в участках судна N на уровне ниже промежуточной зоны 5.
Главным образом, промежуточную зону 5 размещают на верхней палубе судна N, а отделения 6 для животных - на нескольких нижних палубах судна N.
На всех продольных распределительных транспортерах 33, 34 верхней палубы предусмотрено регулирующее устройство, которое позволяет подавать корм в стойла дозами по всем палубам или не подавать корм в стойла без животных, предотвращая, таким образом, образование отходов или разложение неиспользуемого корма.
Предпочтительно, чтобы продольные распределительные транспортеры 33, 34 были оснащены разгрузочными отверстиями возврата 39, 40, которые устанавливают над одним из бункеров для хранения 2, 3 и подключают к соответствующим разгрузочным каналам 41, 42, через которые можно разгружать оставшийся корм в бункер для хранения 2, 3, как описано ниже.
Поперечный распределительный транспортер 31 оснащен, по меньшей мере, одним разгрузочным отверстием возврата 43, 44, расположенным над одним из бункеров для хранения 2, 3 и подключенным к соответствующему разгрузочному каналу 2, 3. Как показано на примере осуществления изобретения, поперечный распределительный транспортер 31 оснащен двумя разгрузочными отверстиями возврата 43, 44, каждое отверстие подключено к одному из бункеров для хранения 2, 3 и установлено возле продольного конца поперечного распределительного транспортера 31.
Кроме того, поперечный распределительный транспортер 31 оснащен, по меньшей мере, одним разгрузочным отверстием 47, которое может быть подключено к устройствам извлечения 48, представленным, например, ленточными транспортерами или шнековыми транспортерами, для разгрузки корма из судна N.
Заслонки нескольких цепных транспортеров системы 1 могут быть представлены заслонками известного типа, которые приводятся в действие соответствующим электрическим сервоприводом.
Несколько цепных транспортеров и ковшевых подъемников 27, 28, а также сервоприводы заслонок, которые могут приводиться в действие и которые регулируют разгрузочные отверстия вышеописанных цепных транспортеров подключены функционально к программируемому электронному элементу управления и обратной главной связи 50, который наблюдает за работой всей системы и включает эти элементы в соответствии с действующими программами с целью соблюдения нескольких требований загрузки и разгрузки корма, а также требований кормления перевозимых животных, которые соответствуют таблицам точного кормления.
Элемент управления и главной обратной связи 50 рассчитан с таким запасом мощности, чтобы можно было осуществлять переключение, в аварийной ситуации, с «первого автоматического» элемента управления и обратной связи на «второй автоматический» элемент управления и обратной связи, и, наконец, на «ручной» элемент управления и обратной связи для предотвращения отключения электропитания любого устройства.
Принцип работы системы, согласно изобретению, следующий.
Корм, поступающий из поездов, прицепов или других судов, засыпается в воронки 12, 13, которые снабжают загрузочный транспортер 9. Корм из загрузочного транспортера 9 поступает в транспортеры для заполнения 18, 19, 15, которые распределяют его в бункеры для хранения 2, 3.
Из бункеров для хранения 2, 3 корм извлекают при помощи разгрузочных транспортеров 21, 22 и перемещают в поперечный распределительный транспортер 31 при помощи ковшевых подъемников 27, 28.
Из поперечного распределительного транспортера 31 корм подают в продольные распределительные транспортеры 33, 34, которые разгружают корм в разгрузочные каналы 37, 38, снабжающие кормушки, установленные в отделениях 6 для кормления животных.
Следует отметить, что количество корма, распределяемое в кормушки, а также частоту распределения корма, можно регулировать очень точно при помощи элемента управления и распределения 50, в соответствии с действующими программами, включая заслонки, расположенные на разгрузочных отверстиях 35, 36, продольных распределительных транспортеров 33, 34.
Кроме того, также при помощи элемента управления и распределения 50 можно управлять и распределять дозу заполнения и опустошения бункеров для хранения 2, 3, чтобы избежать неравномерности загрузки судна N.
Если в продольном распределительном транспортере 33, 34 и/или в поперечном распределительном транспортере 31 остается корм, этот корм можно переместить, при помощи разгрузочных отверстий возврата 39, 40, 43, 44, в бункеры для хранения 2, 3, предотвращая его разбрасывание или деформацию.
После перемещения любой оставшийся корм можно легко высыпать из бункеров для хранения 2, 3 при помощи разгрузочных транспортеров 21, 22, ковшевых подъемников 27, 28 и поперечного распределительного транспортера 31, который высыпает корм через разгрузочное отверстие 47 в разгрузочные каналы или транспортеры, которые подают корм в наземные транспортные средства, такие как, например, прицепы, поезда или другие суда.
На практике установлено, что система, согласно изобретению, полностью достигает предназначенной цели, поскольку она позволяет осуществлять полностью автоматическое управление загрузкой корма на борту судна и его распределением в кормушки отделений для кормления животных в соответствии с количеством и частотами, установленными программами.
Другое преимущество системы согласно изобретению - возможная подача оставшегося корма в бункеры для хранения, предотвращая, таким образом, его разложение.
Другое преимущество системы согласно изобретению - возможная автоматическая разгрузка оставшегося корма после перевозки животных.
Для предложенной системы допускаются многочисленные модификации и вариации в рамках прилагаемой формулы. В дальнейшем все детали могут быть заменены другими соответствующими техническими элементами.
На практике, используемые материалы, а также габариты могут быть любыми материалами и габаритами согласно требованиям и на самом современном уровне техники.
Если после технических характеристик в заявке стоят ссылки, эти ссылки включены для единственной цели - повышения разборчивости формулы изобретения; такие ссылки не ограничивают толкование каждого элемента, определенного на примере такими ссылками.
Система для складывания, хранения и распределения корма на суднах для перевозки большого количества животных включает по меньшей мере один бункер для хранения корма, который расположен под палубой, вытяжные устройства для автоматического забора корма из бункера для перемещения корма по меньшей мере в одну промежуточную зону, которая расположена выше уровня отделений для кормления животных, устройства для автоматического распределения корма из промежуточной зоны в отделения для кормления животных, устройства для автоматической загрузки корма в бункер. Устройства для автоматической загрузки корма, и/или устройства для автоматического забора корма, и/или устройства для автоматического распределения корма включают цепные транспортеры и/или ковшовые подъемники. Использование данного изобретения позволяет повысить точность и надежность работы системы, защиту корма от атмосферных воздействий, улучшить условия хранения корма, возможность выполнения автоматической загрузки и разгрузки корма, повышение устойчивости судна. 8 з.п. ф-лы, 12 ил.
1. Система (1) для складывания, хранения и распределения корма на суднах для перевозки большого количества животных, включающая:
- по меньшей мере один бункер для хранения (2, 3) для хранения корма, расположенный на судне (N) под палубой;
- вытяжные устройства (4) для автоматического забора корма из вышеуказанного бункера для хранения (2, 3) для перемещения корма по меньшей мере в одну промежуточную зону (5), расположенную выше уровня отделений (6) для кормления животных;
- устройства (7) для автоматического распределения корма из вышеуказанной промежуточной зоны (5) в отделения (6) для кормления животных;
- устройства (8) для автоматической загрузки корма в вышеуказанный бункер для хранения (2, 3);
отличающаяся тем, что устройства (8) для автоматической загрузки корма и/или устройства (4) для автоматического забора корма, и/или устройства (7) для автоматического распределения корма включают цепные транспортеры (9, 18, 19, 20, 21, 22, 29, 30, 31, 33, 34) и/или ковшовые подъемники (27, 28).
2. Система (1) по п. 1, отличающаяся тем, что вышеуказанные устройства (8) для автоматической загрузки корма включают цепной транспортер (9), расположенный поперечно по отношению к продольной средней плоскости (ПСП) судна (N) выше уровня вышеуказанного бункера для хранения (2, 3); в нисходящем участке предусмотрен загрузочный транспортер (9) с выпускными отверстиями (16), разнесенными по продольному удлинению загрузочного транспортера (9); их управление осуществляется при помощи заслонок с приводом, которые снабжают загрузочные транспортеры (18, 19) цепного типа, используемые для перемещения и распределения корма в соответствующий бункер для хранения (2, 3).
3. Система (1) по одному из предшествующих пунктов, отличающаяся тем, что вышеуказанные автоматические вытяжные устройства (4) включают вытяжные транспортеры (21, 22) цепного типа, расположенные под вышеуказанным бункером для хранения (2, 3) возле выпускных отверстий (23, 24) бункера для хранения (2, 3); регулировка отверстий осуществляется при помощи заслонок с приводом; вышеуказанные вытяжные транспортеры (21, 22) снабжают по меньшей мере один ковшовый подъемник (27, 28), используемый для разгрузки корма, вытянутого из бункера для хранения (2, 3), в вышеуказанную промежуточную зону (5).
4. Система (1) по одному из предшествующих пунктов, отличающаяся тем, что включает по меньшей мере два ковшовых подъемника (27, 28), расположенные симметрично по отношению к продольной средней плоскости (ПСП) судна (N); между вытяжными транспортерами (21, 22) и ковшовыми подъемниками (27, 28) предусмотрены цепные обменные или перепускные транспортеры (29, 30) для перемещения корма из вышеуказанных вытяжных транспортеров (21, 22) в один или другой ковшовый подъемник (27, 28).
5. Система (1) по одному из предшествующих пунктов, отличающаяся тем, что ковшовые подъемники (27, 28) снабжают поперечный распределительный транспортер (31) цепного типа, расположенный практически горизонтально в промежуточной зоне (5) и направленный поперечно по отношению к продольной средней плоскости (ПСП); устройства (7) для автоматического распределения корма включают продольные распределительные транспортеры (33, 34) цепного типа, расположенные под поперечным распределительным транспортером (31), снабжаемым выпускными отверстиями (32) поперечного распределительного транспортера (31); отверстия разнесены по продольному удлинению поперечного распределительного транспортера (31); их регулировка осуществляется при помощи заслонок с приводом; продольные распределительные транспортеры (33, 34), снабжаемые выпускными каналами (35, 36), разнесенными по продольному удлинению соответствующего продольного распределительного транспортера (33, 34); их регулировка осуществляется выпускными каналами (35, 36), разнесенными по продольному удлинению соответствующего продольного распределительного транспортера (33, 34); их регулировка осуществляется при помощи соответствующих заслонок с приводом, каналов (37, 38) для распределения корма под действием силы тяжести, ведущих к кормушкам, установленным в нескольких отделениях (6) для кормления животных, расположенных под промежуточной зоной (5).
6. Система (1) по одному из предшествующих пунктов, отличающаяся тем, что продольные распределительные транспортеры (33, 34) оснащены выпускными отверстиями возврата (39, 40), расположенными над одним из бункеров для хранения (2, 3) и подключенными к соответствующим выпускным каналам (41, 42) для разгрузки оставшегося корма в бункер для хранения (2, 3).
7. Система (1) по одному из предшествующих пунктов, отличающаяся тем, что поперечный распределительный транспортер (31) оснащен одним выпускным отверстием возврата (43, 44), расположенным над одним из бункеров для хранения (2, 3) и подключенным к соответствующему выпускному каналу (45, 46) для разгрузки оставшегося корма в бункер для хранения (2, 3).
8. Система (1) по одному из предшествующих пунктов, отличающаяся тем, что поперечный распределительный транспортер (31) оснащен одним выпускным отверстием (47), которое можно подключать к вытяжным устройствам (48) для разгрузки корма за пределами судна (N).
9. Система (1) по одному из предшествующих пунктов, отличающаяся тем, что включает программируемый электронный элемент управления и элемент главной обратной связи (50), подключенный функционально к вышеуказанным заслонкам с приводом, к транспортерам (9, 18, 19, 20, 21, 22, 29, 30, 31, 33, 34) и к ковшовым подъемникам (27, 28) для их включения по заданным программам.
| DE 3150934A1, 21.07.1983: | |||
| US4386581A1, 07.06.1983 | |||
| US6016769A, 25.01.2000 | |||
| Кормушка бункерная | 1987 |
|
SU1493202A1 |

