Изобретение относится к области микромеханики, в частности к микромеханическим гироскопам (ММГ) вибрационного типа.
Известно, что сигнал управления канала вторичных колебаний ММГ состоит из квадратурной, синфазной и полезной составляющей, содержащей информацию об угловой скорости основания гироскопа. Полезный и синфазный сигналы, вызванные движением инерционной массы чувствительного элемента под действием квадратурного и синфазного моментов, совпадают по фазе и сдвинуты относительно квадратурного сигнала на 90° [1, 2]. Для выделения полезного сигнала сигнал управления канала вторичных колебаний с помощью демодулятора в выходном тракте гироскопа умножается на опорный сигнал канала управления первичными колебаниями, сдвинутым по фазе таким образом, чтобы фазы опорного и полезного сигналов совпадали.
Квадратурный сигнал зависит от температуры и приводит к ухудшению стабильности выходных характеристик гироскопа, смещения нуля и масштабного коэффициента. Существуют различные способы подавления квадратурного сигнала. Одним из способов является подавление квадратурного сигнала на уровне чувствительного элемента. В патенте [3] чувствительный элемент имеет специальные электроды, с помощью которых формируются моменты, подавляющие движение инерционной массы, вызванное квадратурным моментом. В патенте [4] для подавления квадратурного сигнала используется компенсация квадратурного сигнала в выходном тракте гироскопа. Сигнал с выхода канала вторичных колебаний перед демодулятором складывается с опорным сигналом канала первичных колебаний, равным квадратурному сигналу по амплитуде и противоположным по фазе.
Неточное совпадение фаз опорного и полезного сигналов приводит к прохождению части квадратурного сигнала на выход демодулятора, что приводит к появлению ошибки измерения. Одной из причин неточной настройки фаз опорного и полезного сигналов является синфазный сигнал.
При реализации гироскопа с изменяемым диапазоном измерений также необходима точная настройка фазы демодулятора. Изменение диапазона измерения гироскопа осуществляется путем изменения амплитуды первичных колебаний, что приводит и к изменению квадратурного сигнала [1]. При несовпадении фаз полезного и опорного сигналов изменение квадратурного сигнала приведет к изменению выходного сигнала гироскопа.
Таким образом, для повышения точности и стабильности характеристик гироскопа необходима точная настройка фаз опорного и полезного сигналов.
В качестве прототипа выбран способ настройки фазы опорного сигнала демодулятора выходного тракта ММГ, заключающийся в измерении выходного сигнала при изменении фазы опорного сигнала. При этом определяется такое значение фазы, при которой величина выходного сигнала наиболее близка к нулю [5].
Недостатком способа-прототипа является то, что при наличии синфазного сигнала, в результате настройки фазы опорного и полезного сигналов отличаются друг от друга, что приводит к прохождению части квадратурного сигнала на выход демодулятора.
Задачей изобретения является увеличение точности настройки фазы опорного сигнала демодулятора (далее - фаза).
Технический результат изобретения - повышение точности ММГ, повышение стабильности характеристик ММГ.
Поставленная задача достигается тем, что находят зависимости выходного сигнала от фазы для двух значений задаваемых угловых скоростей, определяют первое (φ1) и второе (φ2) значения фазы, соответствующие точкам пересечения найденных зависимостей выходного сигнала от фазы и выбирают фазу опорного сигнала, равную величине 0,5(φ1+φ2).
Основное преимущество предлагаемого способа обусловлено заявленной совокупностью признаков.
Заявленный способ поясняется чертежами.
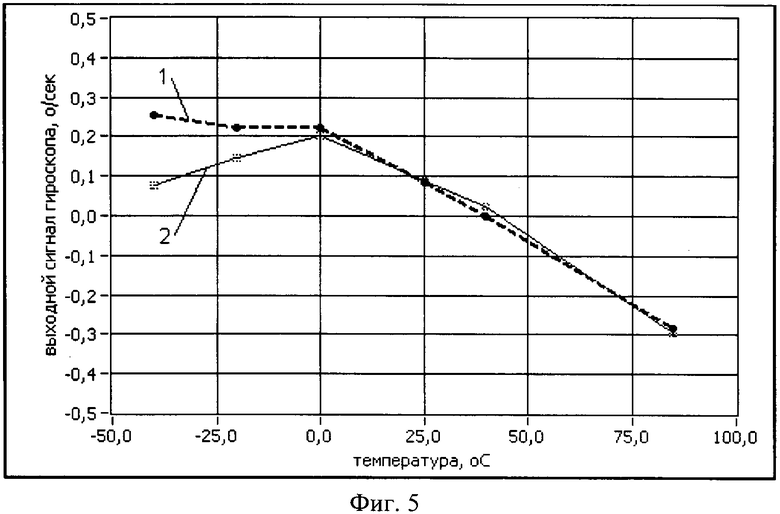
На фиг. 1 приведена блок-схема микромеханического гироскопа.
На фиг. 1 приняты следующие обозначения:
1 - канал управления вторичными колебаниями,
2 - первый преобразователь емкость-напряжение C/V1,
3 - электронный фильтр (ЭФ),
4 - релейное звено,
5 - первый полосовой фильтр (ПФ1),
6 - чувствительный элемент (ЧЭ),
7 - умножитель,
8 - фильтр низких частот (ФНЧ),
9 - канал управления первичными колебаниями,
10 - второй преобразователь емкость-напряжение C/V2,
11 - первое фазосдвигающее устройство,
12 - устройство автоматической регулировки усиления (АРУ),
13 - второе фазосдвигающее устройство,
14 - второй полосовой фильтр (ПФ2).
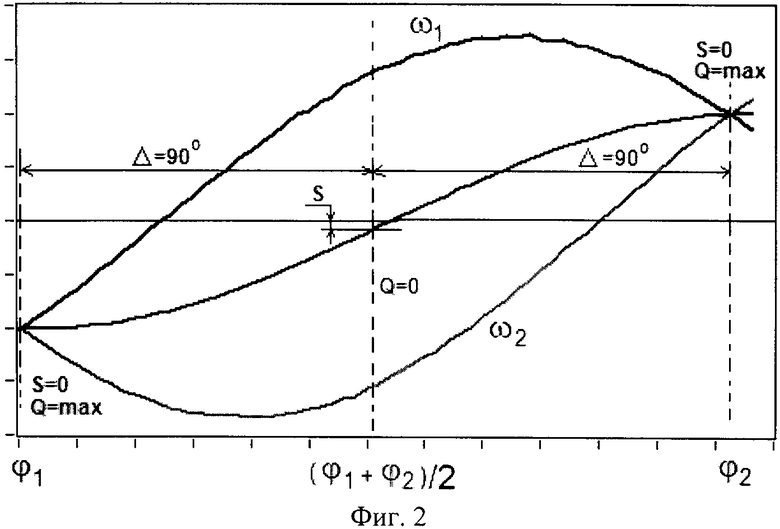
На фиг. 2 приведена расчетная зависимость выходного сигнала гироскопа от фазы, полученная экспериментальным путем,
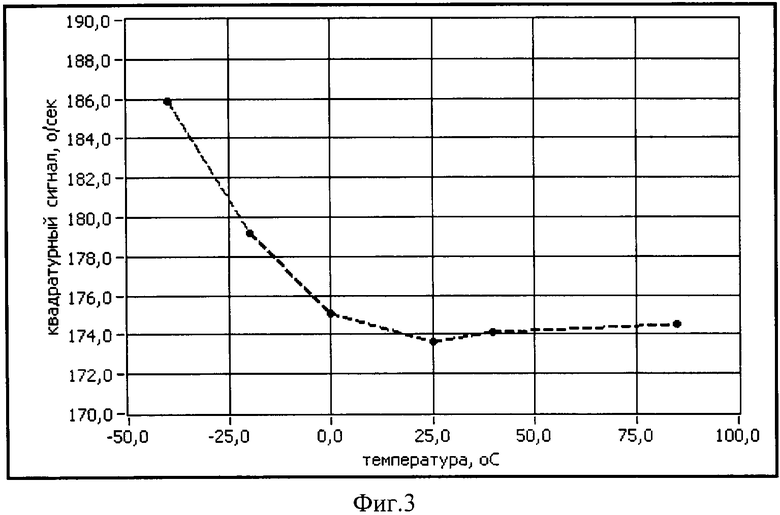
На фиг. 3 приведена экспериментально полученная зависимость квадратурного сигнала гироскопа от температуры.
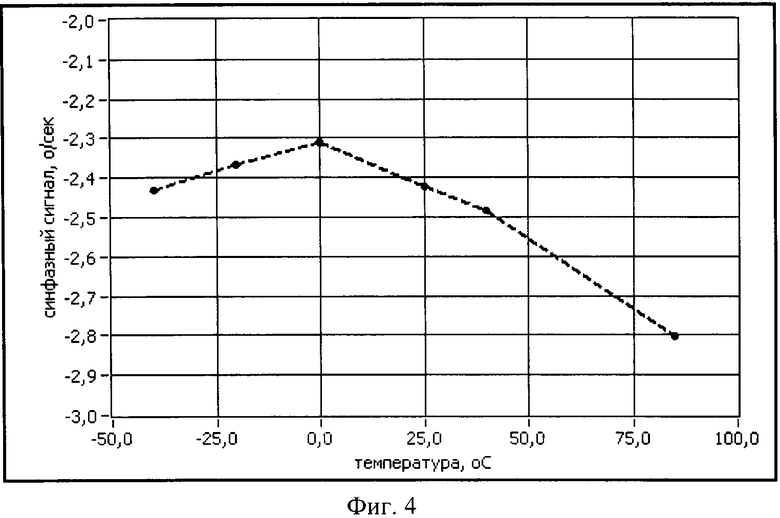
На фиг. 4 приведена экспериментально полученная зависимость синфазного сигнала гироскопа от температуры.
На фиг. 5 приведены экспериментально полученные зависимости выходного сигнала гироскопа от температуры для двух способов настройки. Первый график, обозначенный (1) - способ, описанный в прототипе. Второй график, обозначенный (2) - предложенный способ.
Микромеханический гироскоп включает в себя канал управления первичными колебаниями 9 инерционной массы (ИМ) чувствительного элемента 6, включающий в себя второй преобразователь емкость-напряжение 10, первое фазосдвигающее устройство 11, устройство автоматической регулировки усиления 12, а также канал управления вторичными колебаниями 1, включающий в себя первый преобразователь емкость-напряжение 2, электронный фильтр 3 и релейное звено 4, умножитель 7, первый и второй полосовые фильтры 5, 14, и фильтр низких частот 8.
Устройство, в котором реализован заявленный способ, работает следующим образом.
Канал управления первичными колебаниями 9 возбуждает угловые колебательные движения ИМ чувствительного элемента 6. При появлении переносной скорости основания относительно оси чувствительности возникает момент сил Кориолиса, который вызывает вторичные угловые колебания ИМ гироскопа. При этом в канале управления вторичными колебаниями 1 формируется сигнал управления, который возвращает ИМ в нейтральное положение. Сигнал на выходе канала управления вторичными колебаниями 1 содержит информацию как об угловой скорости, так и информацию о квадратурном и синфазном сигналах, и является амплитудно-модулированным. Для выделения сигнала угловой скорости используется синхронная демодуляция на основе умножителя 7 и фильтра низких частот 8. В качестве опорного сигнала при демодуляции используется сигнал управления с выхода канала управления первичными колебаниями 9.
Для выделения полезного сигнала, пропорционального угловой скорости основания, с помощью второго фазосдвигающего устройства 13 фазу опорного сигнала на выходе канала управления первичными колебаниями 9 сдвигают таким образом, чтобы фаза сигнала на выходе первого полосового фильтра 5 совпадала с фазой опорного сигнала на выходе второго полосового фильтра 14.
Сигнал X на выходе канала управления вторичными колебаниями имеет вид [6]:

где UI - амплитуда полезного сигнала, US - амплитуда синфазного сигнала, UQ - амплитуда квадратурного сигнала, ω - частота первичных колебаний, t - время.
При умножении сигнала X на опорный сигнал Y

где Uоп - амплитуда первичных колебаний, опорного сигнала, φ - фаза,
сигнал Z на выходе умножителя 7 равен
После фильтрации с помощью фильтра низких частот 8 сигналы с удвоенной частотой отфильтровываются, и сигнал Zout на выходе гироскопа равен:

При воздействии угловой скорости ω1 выходной сигнал Z1 равен

Uω1 - амплитуда выходного сигнала, соответствующая угловой скорости ω1.
При воздействии угловой скорости ω2=-ω1 выходной сигнал Z2 равен

Сигналы Z1 и Z2 равны между собой и равны 0,5UQ при значениях фазы опорного сигнала φ=n·180, где n=0, 1, 2, 3…
Сигнал X на выходе канала управления при отсутствии синфазного сигнала представлен следующей формулой

где γ - амплитуда первичных колебаний, czx - коэффициент перекрестной жесткости подвеса, Ω - угловая скорость основания гироскопа.
Изменение амплитуды сигнала X, т.е. изменение масштабного коэффициента, при постоянной угловой скорости возможно за счет изменения амплитуды первичных колебаний γ. При этом изменение амплитуды первичных колебаний приводит и к изменению квадратурного сигнала.
Предложенный способ осуществляется следующим образом.
Определяется зависимость выходного сигнала гироскопа от изменения фазы опорного сигнала, которая задается с помощью фазосдвигающего устройства 13. Зависимость выходного сигнала определяется для двух значений угловых скоростей ω1 и ω2=-ω1. Зависимости выходного сигнала от фазы приведены на фиг. 2.
Далее определяются значения фаз, при которых зависимости пересекаются. В точках пересечения зависимостей в выходном сигнале присутствует только квадратурная составляющая. Интервал между точками пересечения зависимостей составляет 180 градусов. При этом значение фазы в середине интервала равное 0,5(φ1+φ2) соответствует фазе, при которой фаза опорного сигнала и полезного сигнала совпадают.
Предлагаемый способ был апробирован экспериментально при значениях угловой скорости +50°/с и -50°/с.
На фиг. 3 и 4 представлены экспериментально полученные зависимости квадратурного и синфазного сигналов гироскопа от изменения температуры.
При настройке предложенным способом квадратурный сигнал полностью подавляется и не влияет на выходной сигнал. На фиг. 5 можно видеть, что выходные сигналы гироскопа при настройке двумя способами практически одинаковы за исключением области отрицательных температур, где разница между выходными сигналами, полученными предложенным способом от способа-прототипа, равна 0,17°/с, что соответствует максимальному изменению квадратурного сигнала.
Таким образом достигается заявленный технический результат.
Список литературы:
1. Беляева Т.А. Методы компенсации квадратурной помехи в микромеханическом гироскопе RR-типа / диссертация на соискание ученой степени кандидата технических наук: 05.13.01: ОАО "Концерн "ЦНИИ "Электроприбор", 126 с, Санкт-Петербург, 2009, инв. №141187.
2. Патент РФ №2346239.
3. Патент США №8783103.
4. Патент РФ №143781.
5. Патент США №8476970.
6. Aranaud Walther. Bias Contribution in a MEMS Tuning Fork Gyroscope / Christophe Le Blanc,. / Journal Of Electromechanical Systems, vol. 22, №2, 2013.
Изобретение относится к микромеханическим датчикам скорости вращения, в которых используется эффект Кориолиса, в частности к микромеханическим гироскопам (ММГ) вибрационного типа. Способ настройки фазы опорного сигнала демодулятора выходного тракта микромеханического гироскопа заключается в измерении выходного сигнала при изменении фазы опорного сигнала и последующем анализе получаемой зависимости, при этом последовательно задают первое и второе значения угловой скорости по оси чувствительности микромеханического гироскопа, находят зависимости выходного сигнала от фазы для двух значений задаваемых угловых скоростей, определяют первое (φ1) и второе (φ2) значения фазы, соответствующие точкам пересечения найденных зависимостей выходного сигнала от фазы, и выбирают фазу опорного сигнала, равную величине 0,5(φ1+φ2). Технический результат изобретения - повышение точности ММГ. 5 ил.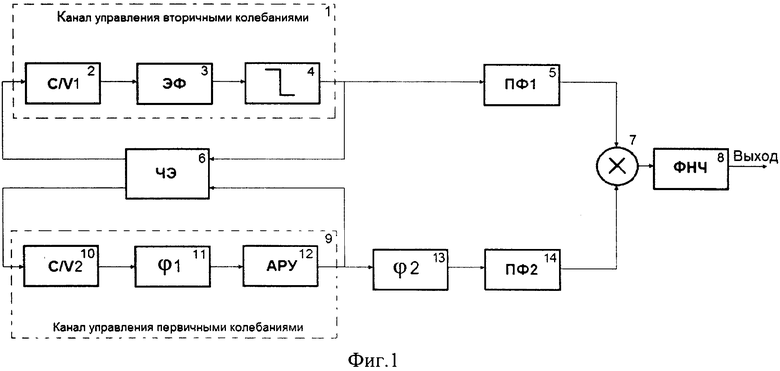
Способ настройки фазы опорного сигнала демодулятора выходного тракта микромеханического гироскопа, заключающийся в измерении выходного сигнала при изменении фазы опорного сигнала и последующем анализе получаемой зависимости, отличающийся тем, что последовательно задают первое и второе значения угловой скорости по оси чувствительности микромеханического гироскопа, находят зависимости выходного сигнала от фазы для двух значений задаваемых угловых скоростей, определяют первое (φ1) и второе (φ2) значения фазы, соответствующие точкам пересечения найденных зависимостей выходного сигнала от фазы, и выбирают фазу опорного сигнала, равную величине 0,5(φ1+φ2).
| US 8476970 B2, 02.07.2013 | |||
| Способ отделения спирта от спиртогеля | 1960 |
|
SU143781A1 |
| СПОСОБ ПОДСТРОЙКИ РЕЗОНАНСНОЙ ЧАСТОТЫ ПОДВЕСА ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2308682C1 |
| US 8820136 B2, 02.09.2014. | |||

