Изобретение относится к области гидроакустики и может быть использовано для исследования структуры первичных гидроакустических полей движущихся надводных и подводных морских шумящих объектов (ШО).
Известны способы исследования структуры первичных гидроакустических полей ШО на стояночных режимах при проведении швартовных испытаний, которые основаны на поочередном включении-выключении механизмов (источников шума) и измерении при этом изменений энергетического спектра гидроакустического шума, что позволяет оценивать вклад отдельных источников в суммарный уровень подводного шума (УПШ) [Патент №2256886, А.П. Евтютов и др. Справочник по гидроакустике. - Л., Судостроение, 1988, с. 199.]. Недостатками этих способов является невысокая точность определения координат зон излучения и невозможность применять их при испытаниях на ходовых режимах.
Известен способ исследования структуры первичных гидроакустических полей движущегося объекта измерения, определения координат его зон излучения и измерения их вкладов в акустическое поле [Патент №2145413]. Недостатками этого аналога является чрезвычайно высокая техническая сложность реализации, невысокая точность определения координат зон излучения и невозможность применять его при испытаниях на стояночных режимах.
Известен принятый за прототип способ исследования структуры первичных гидроакустических полей ШО, заключающийся в расположении гидроакустического приемного модуля с комбинированным гидроакустическим приемником в заданной области натурного водоема и измерении акустической мощности излучения шумящего объекта, рассчитываемой на компьютере, в проходящей через него и приемный модуль плоскости измерений [Патент №2329474].
Недостатком прототипа является невысокая точность определения координат зон излучения и малая информативность о структуре исследуемых с его помощью первичных гидроакустических полей шумящих объектов.
Техническим результатом, получаемым от внедрения изобретения, является существенное увеличение объемов информации о структуре первичных гидроакустических полей исследуемых морских ШО за счет повышения точности определения координат, диаграмм направленности и акустической мощности зон излучения движущегося шумящего объекта в выбранных частотных диапазонах.
Данный технический результат достигается за счет того, что в известном способе исследования первичных гидроакустических полей шумящего объекта, заключающемся в размещении гидроакустического приемного модуля с комбинированным гидроакустическим приемником в заданной области натурного водоема, направлении к приемному модулю исследуемого шумящего объекта, измерении компонент вектора колебательной скорости и акустического давления шумящего объекта и расчете акустической мощности излучения в проходящей через объект и приемный модуль плоскости измерений, ориентируемой по реперному гидроакустическому сигналу, излучаемому шумящим объектом, отличающийся тем, что ненаправленный излучатель монохроматического реперного гидроакустического сигнала размещают на корпусе шумящего объекта с известными координатами, в выбранных для анализа частотных диапазонах шумоизлучения объекта и реперного излучателя измеряют проходные характеристики проекций потоков акустической мощности излучения их зон на оси координат плоскости измерений, по проходным характеристикам проекций векторов потоков на ориентированную параллельно траектории движения ось координат определяют временные моменты обнуления их значений, определяют координаты акустических центров зон излучения выбранных частотных диапазонов на корпусе шумящего объекта по формуле Xt=Хри+V(Ti - Три), где Хри - координата излучателя реперного гидроакустического сигнала на корпусе шумящего объекта, V - скорость движения шумящего объекта, Ti - временные моменты обнуления проекций векторов потоков акустической мощности излучения шумящего объекта в выбранных частотных диапазонах на ось X, ориентированную параллельно траектории движения, Три - временной момент обнуления проекции вектора потока от реперного излучателя, используя результаты измерений проходных характеристик суммарной акустической мощности зон излучения, рассчитываются диаграммы направленности и определяется акустическая мощность зон излучения движущегося шумящего объекта измерений в выбранных частотных диапазонах. Возможно в качестве гидроакустического реперного излучателя использовать зону излучения шумящего объекта с известными координатами на корпусе, например, выходное отверстие циркуляционной трассы охлаждения движительной установки.
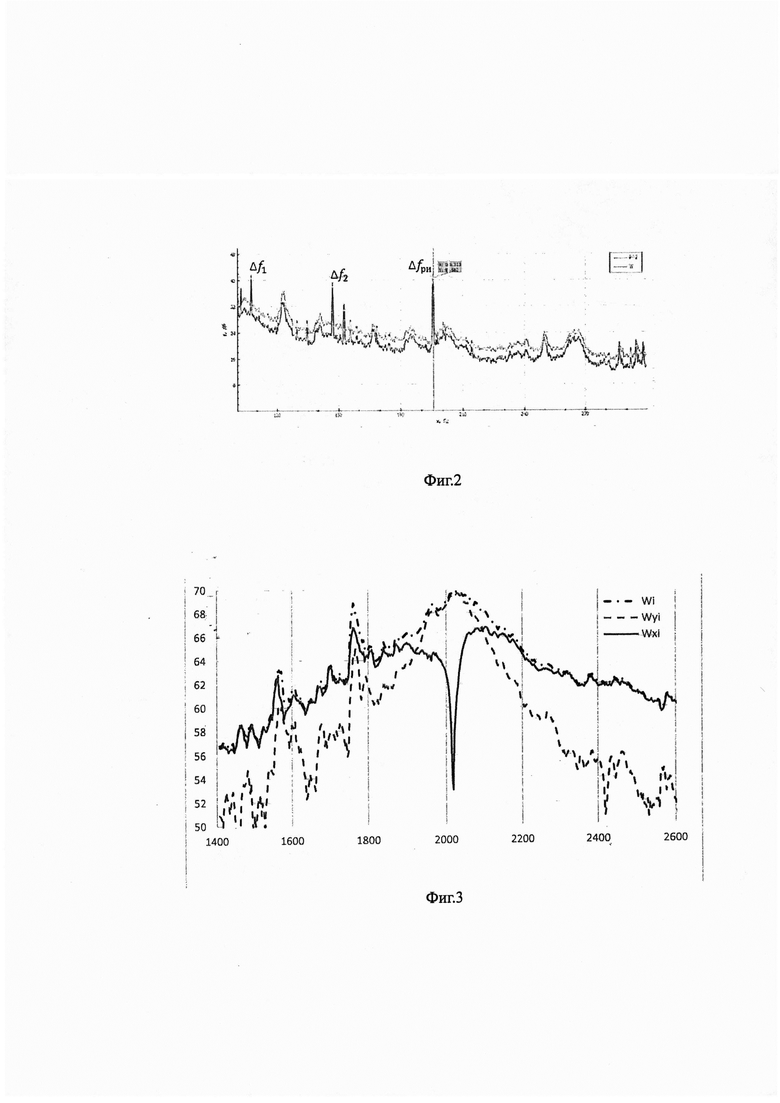
Определение координат источников излучения на корпусе движущегося с известными параметрами (скорость и траектория) морского объекта (МО) базируется на определении времени траверза источника шумоизлучения относительно измерительной системы. Традиционно определение момента прохождения траверза источником производится по времени достижения максимального значения уровня (акустической мощности) его излучения, измеряемого с помощью гидрофона, на его проходной характеристике. Однако такой метод применим только для ограниченного типа источников, например монопольных ненаправленных либо дипольных с осью, ориентированной на траверзе на измерительный гидрофон, при этом метод обладает невысокой точностью, поскольку проходная характеристика в области максимального значения как правило растянута во времени и смещена из-за применения для сглаживания проходной характеристики скользящего временного интервала осреднения единичных результатов измерений, а также изрезана из-за интерференционного взаимодействия звуковых волн от источника в зоне размещения измерительного гидрофона, как это видно на реальной проходной характеристике (см. фиг. 3). Все это затрудняет точное определение временного момента прохождения источником сигнала траверза измерительной системы и построение диаграммы направленности его излучения.
Сущность предлагаемого способа определения координат, диаграмм направленности и акустической мощности зон излучения на корпусе движущегося шумящего морского объекта заключается в том, что комбинированные гидроакустические (векторные) приемники (КГП), в состав которых входит измерительный ненаправленный приемник звукового давления (гидрофон) и трехкомпонентный приемник градиента звукового давления с ортогонально ориентированными осями чувствительности, обладают свойством пространственной избирательности, т.е. предоставляют возможность определения направления на источник звука, поскольку каждый отдельный канал векторного приемника является естественным диполем с косинусной диаграммой направленности, выходной сигнал которого зависит от направления прихода звуковой волны. А наличие в составе приемного модуля измерительной системы КГП и электронного компаса (КЭ), измерительная ось которого ориентирована вдоль горизонтальной оси X КГП, позволяет применять принципиально новые векторно-фазовые методы обработки (ВФМО) получаемой с их помощью измерительной информации.
В частности, в предлагаемом способе с использованием текущих показаний КЭ, априори известного значения курсового угла движения МО и результатов измерения по трем компонентам КГП сигналов от установленного с известными координатами на корпусе МО реперного излучателя (РИ) путем последовательных «электрических» поворотов измерительных осей КГП формируется требуемая плоскость измерений, проходящая через траекторию движения МО и КГП, следующим образом: на первом этапе оси X и Y, лежащие в горизонтальной плоскости, с использованием данных компаса и курсового угла МО «электрически» поворачивают вокруг вертикальной оси Z так, чтобы ось X КГП была сориентирована параллельно траектории движения МО, далее вокруг оси X «электрически» поворачивают оси Z и Y до тех пор пока сигнал от РИ, принимаемый по оси Z, не достигнет минимального значения, что означает завершение формирования содержащей оси и Y плоскости измерений, в которой ось X сориентирована параллельно траектории движения МО, ось Y ориентирована на точку траверза МО перпендикулярно его траектории, а ось Z КГП перпендикулярна плоскости измерений и сигнал от РИ по оси Z в этом случае минимален. Данная ориентация измерительных осей КГП позволяет существенно повысить точность определения местоположения акустических центров зон шумоизлучения на корпусе МО, поскольку, в отличии от определения момента прохождения траверза источником излучения по максимальному значению его, как правило растянутой, проходной характеристики, наблюдаемой по каналу гидрофона и компоненте Y КГП, проходная характеристика по компоненте X КГП, благодаря ориентации ее диаграммы направленности параллельно траектории, в момент траверза практически обнуляется, что позволяет по ней однозначно и точно определить акустический центр источника излучения.
Рассмотрим подробно алгоритм реализации предлагаемого способа определения координат, диаграмм направленности и акустической мощности зон излучения на корпусе движущегося шумящего объекта на реальном примере исследований подвижного морского ШО (см. фиг. 1).
Определение координат зон шумоизлучения на корпусе движущегося объекта осуществляется с использованием приемного модуля (ПМ), содержащего комбинированный гидроакустический приемник (КГП) и электронный компас (КЭ), измерительная ось которого конструктивно ориентируется вдоль горизонтальной оси X КГП. ПМ размещается с известными координатами в натурном водоеме на заданной глубине и кабельной линией связи соединяется с компьютерным центром обработки информации, который в зависимости от типа измерительной системы может стационарно размещаться на берегу или на борту обеспечивающего измерения судна. На корпусе исследуемого морского объекта в точке с известной координатой Хри устанавливается ненаправленный монохроматический излучатель реперного гидроакустического сигнала (см. фиг. 1) и шумящий объект осуществляет движение на известной глубине с заданной скоростью и предписанным курсовым углом относительно ПМ.
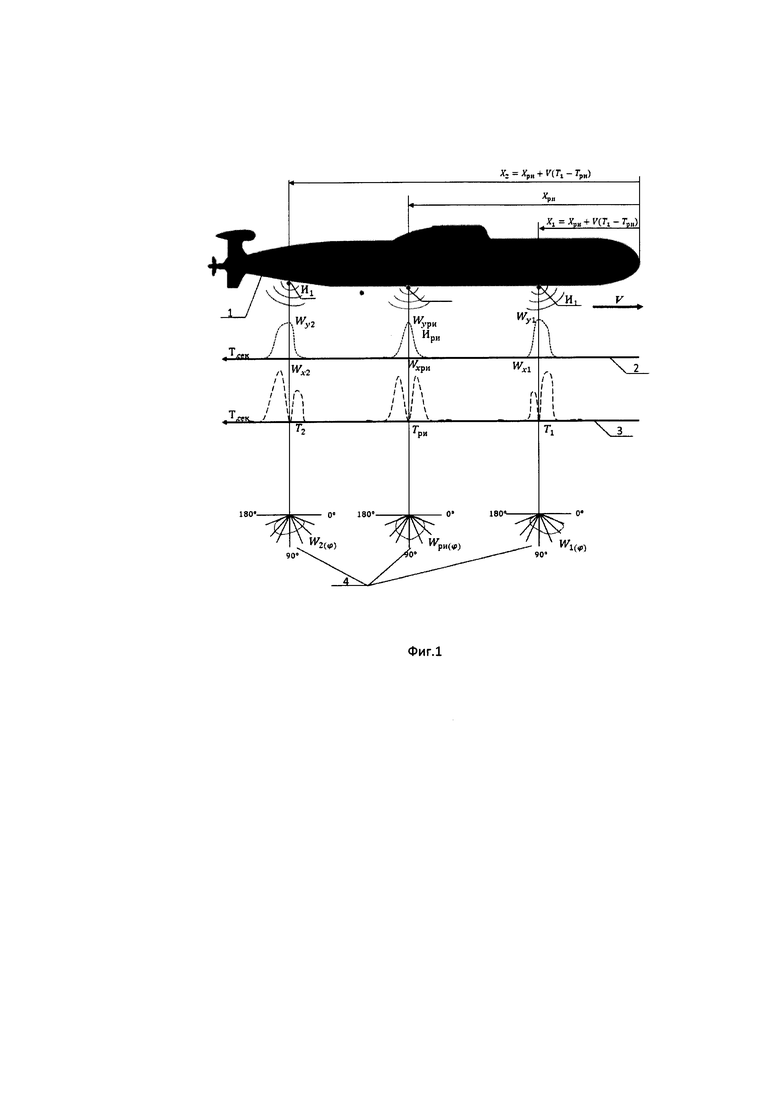
По измеренным КГП параметрам гидроакустического поля морского объекта на компьютере центра обработки в интересующем и анализируемом диапазоне частот  рассчитывается узкополосный спектр акустической мощности с частотным разрешением,
рассчитывается узкополосный спектр акустической мощности с частотным разрешением,  где
где  - единичная ширина полосы анализа при расчете узкополосного спектра,
- единичная ширина полосы анализа при расчете узкополосного спектра,  - среднее значение дискретных или узкополосных диапазонов частот в спектре, N - общее число дискретных и узкополосных диапазонов частот в спектре (см. фиг. 2).
- среднее значение дискретных или узкополосных диапазонов частот в спектре, N - общее число дискретных и узкополосных диапазонов частот в спектре (см. фиг. 2).
Определение предельной ширины  необходимо с целью исключения попадания нескольких источников шума в одну единичную полосу анализа и искажения тем самым результатов последующей векторно-фазовой обработки, что возможно в случаях проведения обработки в широких (например, 1/3 октавных) полосах частот с множеством источников шумоизлучения или в условиях сильно зашумленных акваторий, в которых происходит сложение акустического шума всех находящихся в натурном водоеме шумящих объектов с аналогичными источниками шумоизлучения.
необходимо с целью исключения попадания нескольких источников шума в одну единичную полосу анализа и искажения тем самым результатов последующей векторно-фазовой обработки, что возможно в случаях проведения обработки в широких (например, 1/3 октавных) полосах частот с множеством источников шумоизлучения или в условиях сильно зашумленных акваторий, в которых происходит сложение акустического шума всех находящихся в натурном водоеме шумящих объектов с аналогичными источниками шумоизлучения.
В результате рассмотрения узкополосного спектра акустической мощности в выбранном для анализа частотном диапазоне  выявляется N=3 интересующих источников сигнала с частотными диапазонами
выявляется N=3 интересующих источников сигнала с частотными диапазонами  где
где  - диапазоны анализа источников шумоизлучения шумящего объекта, выбранные для исследования,
- диапазоны анализа источников шумоизлучения шумящего объекта, выбранные для исследования, . диапазон частот излучения ненаправленного излучателя монохроматического реперного гидроакустического сигнала (см. фиг. 2).
. диапазон частот излучения ненаправленного излучателя монохроматического реперного гидроакустического сигнала (см. фиг. 2).
Затем, для реализации алгоритма пространственной фильтрации, задается время единичной выборки анализируемого сигнала τ0, определяемое совместно с частотой дискретизации, использовавшейся при оцифровке сигнала, частотное разрешение спектра  которое одинаково для всех анализируемых диапазонов
которое одинаково для всех анализируемых диапазонов  и сдвиг во времени Δτ между соседними обрабатываемыми выборками (Δτ обычно соответствует половине или четверти длины отдельной выборки τ0.), а также число, входящих в конкретный диапазон
и сдвиг во времени Δτ между соседними обрабатываемыми выборками (Δτ обычно соответствует половине или четверти длины отдельной выборки τ0.), а также число, входящих в конкретный диапазон  и усредняемых при анализе, значений независимых троек проекций потоков акустической мощности
и усредняемых при анализе, значений независимых троек проекций потоков акустической мощности  рассчитанных с частотным разрешением
рассчитанных с частотным разрешением  При расчетах исходных проекций ПАМ пространственная ориентация осей X, Y и Z КГП считается известной, поскольку ось Z КГП конструктивно ориентируется так, чтобы она совпадала с вертикальной осью приемного модуля, конструкция которого создается осесимметричной с положительной или отрицательной плавучестью (в зависимости от типа измерительной системы), что обеспечивает ориентацию вертикальной оси ПМ, а следовательно, и КГП, по направлению силы тяжести, при этом оси X и Y КГП лежат в горизонтальной плоскости и позиционируются в пространстве в геодезической системе координат с использованием данных магнитного компаса, входящего а состав ПМ.
При расчетах исходных проекций ПАМ пространственная ориентация осей X, Y и Z КГП считается известной, поскольку ось Z КГП конструктивно ориентируется так, чтобы она совпадала с вертикальной осью приемного модуля, конструкция которого создается осесимметричной с положительной или отрицательной плавучестью (в зависимости от типа измерительной системы), что обеспечивает ориентацию вертикальной оси ПМ, а следовательно, и КГП, по направлению силы тяжести, при этом оси X и Y КГП лежат в горизонтальной плоскости и позиционируются в пространстве в геодезической системе координат с использованием данных магнитного компаса, входящего а состав ПМ.
Взаимная пространственная ориентация измерительных осей X, Y, Z ПМ и корпуса шумящего объекта в общем случае неизвестна. Определение взаимной пространственной ориентации ПМ и движущегося объекта для построения измерительной плоскости может осуществляться двумя способами: расчетным, подробно рассмотренным выше, когда используются известные данные о скорости, глубине, курсовом угле и траектории движения ШО относительно ПМ, установленного на заданной глубине с сориентированными по магнитному компасу измерительными осями КГП, либо экспериментальным - когда, используя результаты измерения потока акустической мощности W тонального сигнала частоты  ненаправленного реперного гидроакустического излучателя, расположенного на корпусе исследуемого объекта в точке с известной координатой Хри, и его проекций по трем осями чувствительности КГП
ненаправленного реперного гидроакустического излучателя, расположенного на корпусе исследуемого объекта в точке с известной координатой Хри, и его проекций по трем осями чувствительности КГП  в момент траверза реперного излучателя - Три0, определяемого с использованием системы измерения дистанции по тональному сигналу РИ, рассчитываются углы «электрического поворота» измерительных осей ПМ в горизонтальной
в момент траверза реперного излучателя - Три0, определяемого с использованием системы измерения дистанции по тональному сигналу РИ, рассчитываются углы «электрического поворота» измерительных осей ПМ в горизонтальной  и вертикальной
и вертикальной  плоскостях по формулам (1).
плоскостях по формулам (1).

На основании полученных данных об углах поворота осей формируется плоскость измерения X-Y, проходящая через траекторию движения МО и КГП, для чего вначале производится "электрический поворот" только горизонтальных осей ПМ вокруг его вертикально ориентированной измерительной оси Z, на азимутальный угол  - курсовой угол шумящего объекта так, чтобы ось X КГП была сориентирована параллельно траектории движения МО. При "электрическом повороте" горизонтальных измерительных осей КГП вокруг оси Z производится перерасчет исходных измерительных данных по следующим формулам (2, 3):
- курсовой угол шумящего объекта так, чтобы ось X КГП была сориентирована параллельно траектории движения МО. При "электрическом повороте" горизонтальных измерительных осей КГП вокруг оси Z производится перерасчет исходных измерительных данных по следующим формулам (2, 3):

где Vx, Vy - измеренные КГП исходные значения горизонтальных компонентов вектора колебательной скорости,  - пересчитанные значения горизонтальных компонентов вектора колебательной скорости на новую пространственную ориентацию горизонтальных осей КГП при повороте координат на азимутальный угол
- пересчитанные значения горизонтальных компонентов вектора колебательной скорости на новую пространственную ориентацию горизонтальных осей КГП при повороте координат на азимутальный угол  вокруг оси Z ПМ. Аналогичные формулы пересчета применяются при повороте осей Y и Z на полярный угол β вокруг оси X.
вокруг оси Z ПМ. Аналогичные формулы пересчета применяются при повороте осей Y и Z на полярный угол β вокруг оси X.
Для каждой выбранной для анализа дискретной узкополосой составляющей сигнала со средней частотой поддиапазона  в плоскости измерений при движении ШО в заданном частотном диапазоне
в плоскости измерений при движении ШО в заданном частотном диапазоне  рассчитываются проекции потока акустической мощности по трем осями чувствительности КГП
рассчитываются проекции потока акустической мощности по трем осями чувствительности КГП  и суммарное значение ПАМ этого сигнала (4), являющееся модулем вектора потока акустической мощности, как функции времени.
и суммарное значение ПАМ этого сигнала (4), являющееся модулем вектора потока акустической мощности, как функции времени.

По полученным таким образом результатам измерений строятся проходные характеристики проекций потока акустической мощности и рассчитываются диаграммы направленности источников шума в плоскости измерений.
В рассматриваемом примере (см. фиг. 1), после определения пространственной ориентации приемного модуля относительно корпуса движущегося шумящего объекта для каждого из анализируемых частотных диапазонов  по исходной измерительной информации, полученной с ПМ, рассчитываются и строятся проходные характеристики проекций потока акустической мощности по осями чувствительности КГП, лежащим в плоскости измерений и направленным параллельно и перпендикулярно траектории движения,
по исходной измерительной информации, полученной с ПМ, рассчитываются и строятся проходные характеристики проекций потока акустической мощности по осями чувствительности КГП, лежащим в плоскости измерений и направленным параллельно и перпендикулярно траектории движения,  (позиции 2, 3 фиг. 1). По проходным характеристикам
(позиции 2, 3 фиг. 1). По проходным характеристикам  определяются временные моменты их обнуления Ti, которые соответствуют времени прохождения траверза акустическими центрами зон излучения на корпусе ШО в анализируемых частотных диапазонах. Затем, зная скорость движения исследуемого объекта и координаты реперного излучателя вычисляются координаты акустических центов зон излучения анализируемых частотных диапазонов
определяются временные моменты их обнуления Ti, которые соответствуют времени прохождения траверза акустическими центрами зон излучения на корпусе ШО в анализируемых частотных диапазонах. Затем, зная скорость движения исследуемого объекта и координаты реперного излучателя вычисляются координаты акустических центов зон излучения анализируемых частотных диапазонов  на корпусе ШО по формуле (5).
на корпусе ШО по формуле (5).

По данным расчета проходных характеристик проекций потока акустической мощности по трем осями чувствительности КГП  вычисляется проходная характеристика модуля вектора потока акустической мощности излучения каждой зоны Wi, нормируется на текущее расстояние до КГП, при этом определяется угол
вычисляется проходная характеристика модуля вектора потока акустической мощности излучения каждой зоны Wi, нормируется на текущее расстояние до КГП, при этом определяется угол  от проходящей мимо i-той зоны измеряемого объекта до КГП и рассчитывается пространственное распределение потока акустической мощности (ПРПАМ) излучаемой i-той зоной как функция угла
от проходящей мимо i-той зоны измеряемого объекта до КГП и рассчитывается пространственное распределение потока акустической мощности (ПРПАМ) излучаемой i-той зоной как функция угла 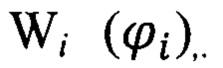 Графическим построением зависимости ПРПАМ в полярных координатах определяется диаграмма направленности излучения i-той зоны, а суммированием (интегрированием) по углу
Графическим построением зависимости ПРПАМ в полярных координатах определяется диаграмма направленности излучения i-той зоны, а суммированием (интегрированием) по углу  распределения потока акустической мощности (диаграммы направленности) определяется акустическая мощность излучения i-той зоны.
распределения потока акустической мощности (диаграммы направленности) определяется акустическая мощность излучения i-той зоны.
Таким образом, способ позволяет определять координаты, диаграммы направленности и акустическую мощность зон излучения на корпусе движущихся ШО с точностью превосходящей известные запатентованные решения при малой технической сложности реализации.
1 Патент №2256886, кл. G01H 3/00, 2004.
2 А.П. Евтютов и др. Справочник по гидроакустике. - Л., Судостроение, 1988, с. 199.
3 Патент РФ №2145413, кл. G01H 17/00, 1993.
4 Патент РФ №3329474, кл. G01H 3/00, 2006 - прототип.
5 В.А. Гордиенко, В.Н. Некрасов Векторно-фазовые измерения в гидроакустике. Москва, ВНИИФТРИ, 2007, 451 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ исследования структуры первичных гидроакустических полей шумящего объекта | 2022 |
|
RU2787312C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПЕРВИЧНЫХ ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ШУМЯЩЕГО ОБЪЕКТА | 2006 |
|
RU2329474C2 |
| СПОСОБ ЛОКАЛИЗАЦИИ ОБЛАСТЕЙ АКУСТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2014 |
|
RU2580216C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЕЙ И ГОРИЗОНТАЛЬНОЙ НАПРАВЛЕННОСТИ ШУМОВ МОРСКОГО НЕФТЕГАЗОВОГО КОМПЛЕКСА | 2011 |
|
RU2480781C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2016 |
|
RU2624798C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано для исследования тонкой структуры первичных гидроакустических полей движущихся надводных и подводных морских шумящих объектов (МО). Технический результат: повышение точности определения на корпусе МО координат зон излучения источников шумящего объекта, их частотных диапазонов, акустической мощности излучения и вкладов в первичное акустическое поле объекта измерения на ходовых режимах. Сущность: способ заключается в расположении гидроакустического приемного модуля с комбинированным гидроакустическим приемником в заданной области натурного водоема, направлении к приемному модулю исследуемого шумящего объекта и измерении рассчитываемой на компьютере акустической мощности излучения шумящего объекта в плоскости измерений, ориентируемой вдоль траектории движения объекта по реперному гидроакустическому сигналу, излучаемому шумящим объектом. При этом излучатель реперного гидроакустического сигнала размещается с известными координатами на корпусе шумящего объекта, а в выбранных для анализа частотных диапазонах шумоизлучения объекта и реперного излучателя измеряются проходные характеристики проекций потоков акустической мощности излучения их зон на оси координат плоскости измерений. По проходным характеристикам проекций векторов потоков на ось, ориентированную параллельно траектории движения, определяются временные моменты обнуления их значений, затем определяются координаты акустических центров зон излучения на корпусе шумящего объекта выбранных частотных диапазонов по формуле Xi=Хри+V(Ti-Три), где Хри - координата на корпусе шумящего объекта излучателя реперного гидроакустического сигнала, V - скорость движения шумящего объекта, Ti - временные моменты обнуления проекций векторов потоков акустической мощности излучения шумящего объекта в выбранных частотных диапазонах на ось X, ориентированную параллельно траектории движения, Три - временной момент обнуления проекции вектора потока от реперного излучателя, используя результаты измерений проходных характеристик суммарной акустической мощности зон излучения, рассчитываются диаграммы направленности и определяется акустическая мощность зон излучения движущегося шумящего объекта измерений в выбранных частотных диапазонах. 1 з.п. ф-лы, 3 ил.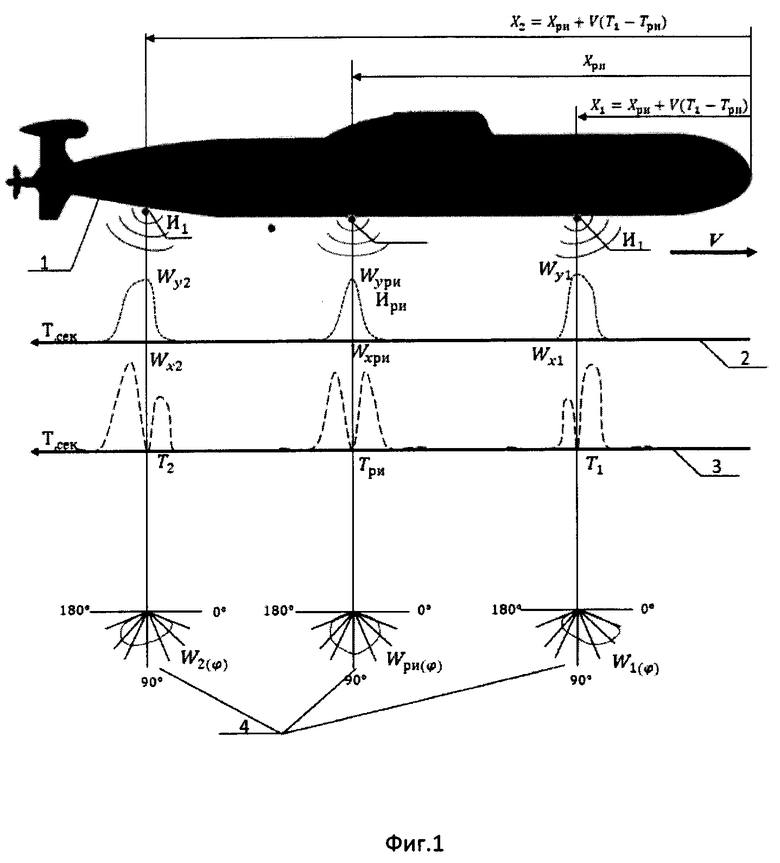
1. Способ определения координат, диаграмм направленности и акустической мощности зон излучения на корпусе движущегося шумящего объекта в выбранных частотных диапазонах, заключающийся в размещении гидроакустического приемного модуля с комбинированным гидроакустическим приемником в заданной области натурного водоема, направлении к приемному модулю исследуемого шумящего объекта, измерении компонент вектора колебательной скорости и акустического давления шумящего объекта и расчете акустической мощности излучения в проходящей через объект и приемный модуль плоскости измерений, ориентируемой по реперному гидроакустическому сигналу, излучаемому шумящим объектом, отличающийся тем, что ненаправленный излучатель монохроматического реперного гидроакустического сигнала размещают на корпусе шумящего объекта с известными координатами, в выбранных для анализа частотных диапазонах шумоизлучения объекта и реперного излучателя измеряют проходные характеристики проекций потоков акустической мощности излучения их зон на оси координат плоскости измерений; по проходным характеристикам проекций векторов потоков на ориентированную параллельно траектории движения ось координат определяют временные моменты обнуления их значений, определяют координаты акустических центров зон излучения выбранных частотных диапазонов на корпусе шумящего объекта по формуле

где Хри - координата излучателя реперного гидроакустического сигнала на корпусе шумящего объекта, V - скорость движения шумящего объекта, Ti - временные моменты обнуления проекций векторов потоков акустической мощности излучения шумящего объекта в выбранных частотных диапазонах на ось X, ориентированную параллельно траектории движения, Три - временной момент обнуления проекции вектора потока от реперного излучателя, используя результаты измерений проходных характеристик суммарной акустической мощности зон излучения, рассчитываются диаграммы направленности и определяется акустическая мощность зон излучения движущегося шумящего объекта измерений в выбранных частотных диапазонах.
2. Способ по п. 1, отличающийся тем, что в качестве гидроакустического реперного излучателя применяют зону излучения шумящего объекта с известными координатами на корпусе, например выходное отверстие циркуляционной трассы охлаждения движительной установки.
| СПОСОБ РЕГИСТРАЦИИ МАЛОШУМНОГО МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2572052C2 |
| Способ регистрации шумоизлучения морского подводного объекта | 2020 |
|
RU2746312C1 |
| Способ регистрации шумоизлучения морского объекта | 2020 |
|
RU2746342C1 |
| Способ регистрации проходной характеристики морского объекта | 2021 |
|
RU2774731C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ И КООРДИНАТ ПОДВОДНОГО ОБЪЕКТА | 1993 |
|
RU2038615C1 |
| US 4173008 A, 30.10.1979. | |||
