Изобретение относится к области гидроакустики и может быть использовано для исследования тонкой структуры первичных гидроакустических полей надводных и подводных морских шумящих объектов (ШО).
Известны способы исследования структуры первичных гидроакустических полей морских шумящих объектов на стояночных режимах при проведении швартовных испытаний, которые основаны на поочередном включении-выключении механизмов (источников шума) и измерении при этом изменений энергетического спектра гидроакустического шума, что позволяет оценивать вклад отдельных источников в суммарный уровень подводного шума (УПШ) [Патент №2256886, А.П. Евтютов и др. Справочник по гидроакустике. - Л., Судостроение, 1988, с. 199]. Недостатками этих способов является невысокая точность определения координат зон излучения и невозможность применять их при испытаниях на ходовых режимах.
Известен способ исследования структуры первичных гидроакустических полей движущегося объекта измерения, определения координат его зон излучения и измерения их вкладов в акустическое поле [Патент №2145413]. Недостатками этого аналога является чрезвычайно высокая техническая сложность реализации, невысокая точность определения координат зон излучения и невозможность применять его при испытаниях на стояночных режимах.
Известен принятый за прототип способ исследования структуры первичных гидроакустических полей морских шумящих объектов, заключающийся в расположении гидроакустического приемного модуля с комбинированным гидроакустическим приемником в заданной области натурного водоема и измерении акустической мощности излучения шумящего объекта, рассчитываемой на компьютере, в проходящей через него и приемный модуль плоскости измерений [Патент №2329474].
Недостатком прототипа является невысокая точность определения координат зон излучения и малая информативность о структуре исследуемых с его помощью первичных гидроакустических полей шумящих объектов.
Техническим результатом, получаемым от внедрения изобретения, является повышение информативности об исследуемых первичных гидроакустических полях морских ШО за счет повышения точности определения координат на корпусе объекта зон излучения его источников, их частотных диапазонов и акустической мощности излучения, в том числе в условиях зашумленных заводских акваторий при проведении швартовных испытаний.
Данный технический результат достигается за счет того, что в известном способе исследования первичных гидроакустических полей шумящего объекта, заключающемся в расположении гидроакустического приемного модуля с комбинированным гидроакустическим приемником в заданной области натурного водоема и измерении акустической мощности излучения шумящего объекта, рассчитываемой на компьютере, в проходящей через него и приемный модуль плоскости измерений, шумящий объект размещают в натурном водоеме так, чтобы приемный модуль в момент выполнения измерений находился в створе корпуса шумящего объекта на удалении не более половины его длины, определяют их взаимное пространственное положение, рассчитывают по измеренным параметрам гидроакустического поля узкополосный спектр акустической мощности и по нему находят требующие детального анализа дискретные и узкополосные диапазоны частот, затем в выбранных диапазонах частот в плоскости измерений рассчитывают диаграммы пространственного распределения потоков акустической мощности, по диаграммам, зная взаимное пространственное положение шумящего объекта и приемного модуля, определяют углы прихода звуковой энергии от соответствующей зоны излучения шумящего объекта на приемный модуль и рассчитывают координаты и акустическую мощность излучения зон на корпусе шумящего объекта.
Сущность способа заключается в том, что в гидроакустических системах, реализующих векторно-фазовые методы измерений (ВФМИ) и базирующихся на комбинированных гидроакустических (векторных) приемниках (КГП), в состав которых входит измерительный ненаправленный приемник звукового давления (гидрофон) и трехкомпонентный приемник градиента звукового давления с ортогонально ориентированными осями чувствительности, имеется та их особенность, что уже в случае применения одиночного КГП возникает качественный скачок, который заключается в появлении новых свойств у точечной приемной системы - возможности определять направление на источник шума, при наличии нескольких источников оценивать рабочие полосы их частот и разделять источники по направлениям с определением акустической мощности их излучения. Это достигается благодаря применению принципиально новых (по отношению к системам на базе гидрофонов) алгоритмов обработки информации, обеспечивающих измерение в заданной полосе частот как интегрального значения потока акустической энергии (мощности) в точке размещения КГП, так и ее пространственного (в зависимости от угла прихода) распределения, что в свою очередь обеспечивает возможность выделения и измерения лишь той части акустической энергии, которая обусловлена наличием в выбранном секторе окружающей среды измеряемого объекта.
Рассмотрим более подробно алгоритм реализации предлагаемого способа исследования структуры первичных гидроакустических полей шумящего объекта, базирующегося на векторно-фазовых методах измерений (ВФМИ) и пространственно-частотной фильтрации (ПЧФ) потоков акустической мощности (ПАМ) при обработке сигналов, регистрируемых каналами приемного модуля (ПМ) с комбинированным гидроакустическим приемником.
Рассмотрение проводится на реальном примере исследований размещенного в натурном водоеме шумящего морского объекта на этапе его швартовных испытаний, выполняемых на стояночных режимах в заводской акватории, в которой в это же время присутствовали еще морские и береговые шумящие объекты.
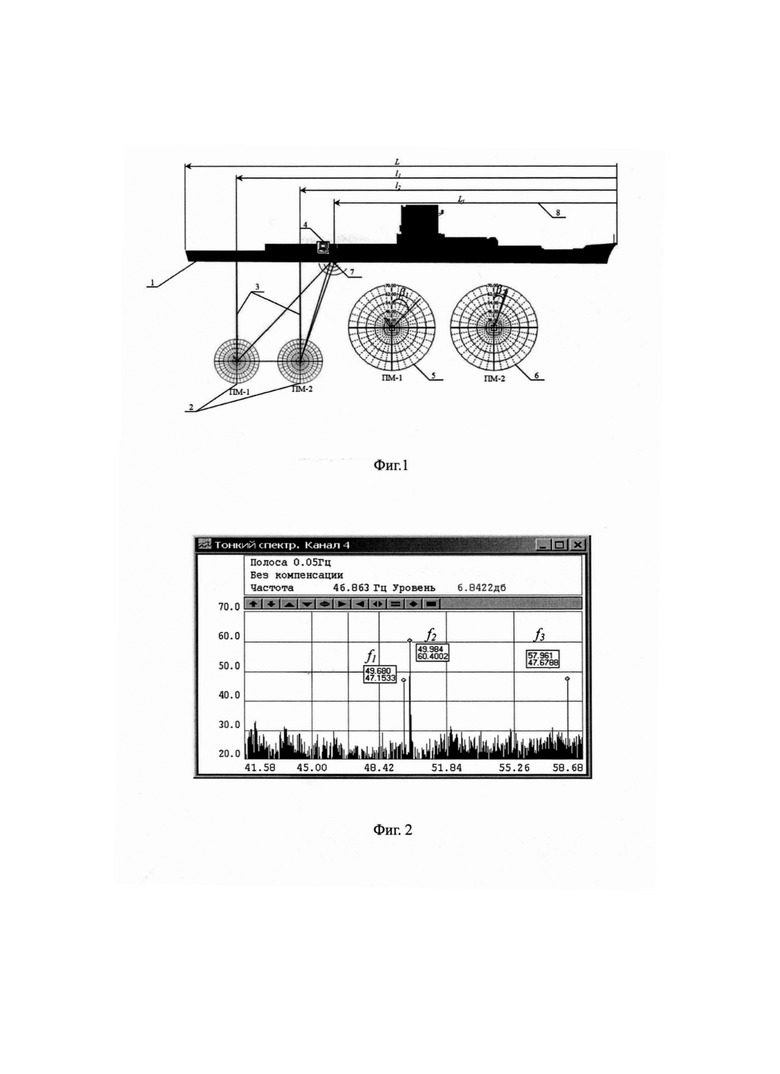
Исследования структуры гидроакустического поля шумящего объекта производятся с использованием двух приемных модулей ПМ1 и ПМ2 (см. фиг. 1), которые размещаются в различных местах натурного водоема путем опускания их с борта исследуемого шумящего объекта 1 в определенных местах корпуса ШО  и
и  на известные глубины (расстояния от корпуса) h1 и h2. Затем рассчитывается взаимное пространственное расположение ШО, ПМ1 и ПМ2 и определяются угловые сектора для ПМ1 и ПМ2, в пределах которых при измерениях и поиске находятся источники шума исследуемого морского объекта. Таким образом, ПМ1 и ПМ2 размещаются в створе корпуса исследуемого шумящего морского объекта 1 на удалении не более половины его длины L в вертикальной плоскости, проходящей вдоль корпуса ШО через приемные модули 2, которые связываются кабельными линиями связи 3 с аппаратурой обработки 4, обеспечивающей реализацию векторно-фазовых методов измерений параметров гидроакустического поля.
на известные глубины (расстояния от корпуса) h1 и h2. Затем рассчитывается взаимное пространственное расположение ШО, ПМ1 и ПМ2 и определяются угловые сектора для ПМ1 и ПМ2, в пределах которых при измерениях и поиске находятся источники шума исследуемого морского объекта. Таким образом, ПМ1 и ПМ2 размещаются в створе корпуса исследуемого шумящего морского объекта 1 на удалении не более половины его длины L в вертикальной плоскости, проходящей вдоль корпуса ШО через приемные модули 2, которые связываются кабельными линиями связи 3 с аппаратурой обработки 4, обеспечивающей реализацию векторно-фазовых методов измерений параметров гидроакустического поля.
По измеренным КГП параметрам гидроакустического поля на компьютере в интересующем и анализируемом диапазоне частот Δƒ (в рассматриваемом примере это 1/3-октавная полоса частот с центральной частотой 50 Гц) рассчитывается узкополосный спектр акустической мощности с частотным разрешением  где δƒ - единичная ширина полосы анализа при расчете узкополосного спектра, ƒi - среднее значение дискретных или узкополосных диапазонов частот в спектре, N - общее число дискретных и узкополосных диапазонов частот в спектре (см. фиг. 2).
где δƒ - единичная ширина полосы анализа при расчете узкополосного спектра, ƒi - среднее значение дискретных или узкополосных диапазонов частот в спектре, N - общее число дискретных и узкополосных диапазонов частот в спектре (см. фиг. 2).
Определение предельной ширины δƒ необходимо с целью исключения попадания нескольких источников шума в одну единичную полосу анализа и искажения тем самым результатов последующей векторно-фазовой обработки, что возможно в случаях проведения измерений в широких (например, 1/3 октавных) полосах частот сложных, с большим количеством источников шума ШО, или в условиях сильно зашумленных акваторий, при которых происходит измерение суммарной акустической мощности всех находящихся в натурном водоеме шумящих объектов.
В анализируемом диапазоне частот Δƒ (см. фиг. 2) минимальная разность частот между соседними составляющими спектра дискретной ƒi=49,680 Гц и узкополосной ƒi+1=49,984 Гц составляет 0,304 Гц, поэтому выбирается единичная ширина полосы анализа при расчете узкополосного спектра δƒ=0,05 Гц, которой достаточно для разделения и выявления всех источников шума и проведения дальнейшей обработки методами пространственно-частотной фильтрации (ПЧФ) потоков акустической мощности (ПАМ).
В результате рассмотрения узкополосного спектра акустической мощности в выбранном для анализа частотном диапазоне Δƒ выявляется N=3 источника сигналов различной частоты fi, - ƒ1=49,680 Гц, ƒ2=49,984 Гц, ƒ3=57,961 Гц, при этом для каждого из сигналов задается свой частотный поддиапазон анализа Δƒi, обусловленный степенью нестабильности частоты источника сигнала и включающий одну или несколько единичных полос анализа δƒ. Из анализа данных рассчитанного узкополосного спектра, приведенного на фиг. 2, для анализа источников шума 1 и 3 выбирается поддиапазон шириной 2δƒ, а для источника 2 поддиапазон шириной 4δƒ.
Затем, для реализации алгоритма пространственной фильтрации, задается время единичной выборки анализируемого сигнала τ0, определяющее совместно с частотой дискретизации, использовавшейся при оцифровке сигнала, частотное разрешение спектра δƒ, которое одинаково для всех анализируемых поддиапазонов Δƒi, и сдвиг во времени Δτ между соседними обрабатываемыми выборками (Δτ обычно соответствует половине или четверти длины отдельной выборки τ0), а также число, входящих в конкретный поддиапазон и усредняемых при анализе, рассчитанных с частотным разрешением δƒ значений (для нашего случая 2 и 4) независимых троек проекций потоков акустической мощности 

 При расчетах проекций ПАМ пространственная ориентация осей X, Y и Z комбинированных гидроакустических (векторных) приемников (КГП), которые размещаются в приемных модулях (ПМ), считается известной, поскольку ось Z КГП конструктивно ориентируется так, чтобы она совпадала с вертикальной осью приемного модуля, конструкция которого создается осесимметричной с положительной или отрицательной плавучестью (в зависимости от типа измерительной системы), что обеспечивает ориентацию вертикальной оси ПМ, а следовательно и КГП, по направлению силы тяжести, при этом оси X и Y КГП, лежат в горизонтальной плоскости и позиционируются в пространстве в геодезической системе координат с использованием магнитного компаса, входящего а состав ПМ.
При расчетах проекций ПАМ пространственная ориентация осей X, Y и Z комбинированных гидроакустических (векторных) приемников (КГП), которые размещаются в приемных модулях (ПМ), считается известной, поскольку ось Z КГП конструктивно ориентируется так, чтобы она совпадала с вертикальной осью приемного модуля, конструкция которого создается осесимметричной с положительной или отрицательной плавучестью (в зависимости от типа измерительной системы), что обеспечивает ориентацию вертикальной оси ПМ, а следовательно и КГП, по направлению силы тяжести, при этом оси X и Y КГП, лежат в горизонтальной плоскости и позиционируются в пространстве в геодезической системе координат с использованием магнитного компаса, входящего а состав ПМ.
В рассматриваемом примере ПМ1 и ПМ2, имеющие отрицательную плавучесть, свободно спускаются с борта исследуемого шумящего объекта на кабелях связи (см. фиг. 1), оси Z КГП и приемных модулей ориентируются при этом вертикально, а оси X КГП по направлениям измерительных осей магнитных компасов, входящих в состав соответствующих ПМ. Затем в геодезической системе координат измеряются курсовой угол шумящего объекта и углы отклонения горизонтальных осей X КГП в ПМ1и ПМ2 от направления на север (или что одно и то же - курсовые углы ПМ относительно осей X). Курсовой угол ШО измеряется либо его собственной аппаратурой, либо отдельным компасом, который устанавливается на его борту с измерительной осью, ориентированной вдоль продольной оси исследуемого ШО. На основании данных об углах формируются плоскости измерений X1-Z1 и X2-Z2, которые ориентируются вертикально и проходят вдоль борта шумящего объекта, приемные модули и оси X, Z соответствующих КГП, для чего производится "электрический поворот" только горизонтальных осей ПМ1 и ПМ2 вокруг их вертикально ориентированных измерительных осей Z1 и Z2, соответственно, на азимутальный угол αкэ - курсовой угол шумящего объекта. При "электрическом повороте" горизонтальных измерительных осей КГП вокруг оси Z производится перерасчет исходных данных по следующим формулам:


где Vx, Vy - измеренные КГП исходные значения горизонтальных компонентов вектора колебательной скорости,  ,
,  - пересчитанные значения горизонтальных компонентов вектора колебательной скорости на новую пространственную ориентацию горизонтальных осей КГП при повороте координат на азимутальный угол αкэ вокруг осей Z1 и Z2, соответственно для ПМ1 и ПМ2. Аналогичные формулы применяются при необходимости поворота осей Y и Z на полярный угол
- пересчитанные значения горизонтальных компонентов вектора колебательной скорости на новую пространственную ориентацию горизонтальных осей КГП при повороте координат на азимутальный угол αкэ вокруг осей Z1 и Z2, соответственно для ПМ1 и ПМ2. Аналогичные формулы применяются при необходимости поворота осей Y и Z на полярный угол  вокруг оси X.
вокруг оси X.
Взаимная пространственная ориентация произвольно (с неизвестными координатами) расположенных в натурном водоеме приемного модуля (ПМ) и корпуса шумящего объекта определяется с использованием реперных (опорных) гидроакустических и/или вибрационных излучателей, которые размещаются в известных точках на корпусе шумящего объекта измерений, например в носу и корме, и излучают сигналы на частотах fri, лежащих в рабочем диапазоне частот КГП. Затем, используя первичную измерительную информацию с каналов КГП ПМ, с заданным частотным разрешением δƒ на реперных частотах fri рассчитываются проекции потоков акустической мощности от реперных излучателей 

 и по ним определяются азимутальные ϕi и полярные
и по ним определяются азимутальные ϕi и полярные  углы прихода сигналов от реперных излучателей на ПМ в горизонтальной и вертикальной плоскостях, а также (при необходимости) значение модуля
углы прихода сигналов от реперных излучателей на ПМ в горизонтальной и вертикальной плоскостях, а также (при необходимости) значение модуля  вектора потока акустической мощности каждого из реперных излучателей в направлении, определяемом углами ϕi и :
вектора потока акустической мощности каждого из реперных излучателей в направлении, определяемом углами ϕi и :


По полученным значениям углов ϕi и производится "электрический поворот" горизонтальных осей КГП вокруг измерительной оси Z на азимутальный угол ϕi - угол, показывающий отклонение оси электронного компаса и следовательно оси Xi от направления на i-тый реперный излучатель, а затем вокруг оси Yi на полярный угол , при этом формируются плоскости измерений Xi-Yi, проходящие через i-тый реперный излучатель, размещенный на шумящем объекте, и приемный модуль, рассчитывается пространственное расположение ПМ относительно всех реперных излучателей, находящихся в известных местах на корпусе шумящего объекта, определяется пространственный сектор углов, в пределах которого находится исследуемый шумящий объект и его источники излучения, а также исключаются из рассмотрения и детального анализа источники, находящиеся вне найденного сектора, при этом с целью повышения точности определения координат зон излучения шумящего объекта при измерениях может применяться несколько ПМ.
После определения плоскости измерений шумящего объекта в ней рассчитываются диаграммы пространственного распределения потоков акустической мощности, по которым находятся углы прихода звуковой энергии в выбранном частотном поддиапазоне от соответствующей ему зоны излучения на корпусе шумящего объекта и рассчитываются координаты и акустическая мощность излучения зон на корпусе шумящего объекта.
В рассматриваемом примере после определения взаимной пространственной ориентации приемных модулей 2 и корпуса шумящего объекта 1 (см. фиг. 1) по исходной измерительной информации, полученной с приемных модулей ПМ1 и ПМ2, в сформированных плоскостях измерений X1-Z1 и X2-Z2 рассчитываются диаграммы пространственного распределения потоков акустической мощности (ПРПАМ) для каждого из анализируемых частотных поддиапазонов Δƒi. На позициях 5 и 6 фиг. 1 приведены диаграммы ПРПАМ, рассчитанные для ПМ-1 и ПМ-2 в плоскостях измерений X1-Z1 и X2-Z2, соответственно, в частотном поддиапазоне f3=57,961 Гц. По диаграммам 5, 6 определяются углы β1 ч β2 прихода звуковой энергии от соответствующей данному частотному поддиапазону зоны излучения шумящего объекта на приемные модули ПМ-1 и ПМ-2, соответственно, и, зная взаимное пространственное расположение шумящего объекта 1 и приемных модулей 2, рассчитывается координата Li (например, расстояние от носа объекта) зоны излучения 7 на корпусе шумящего объекта 1 и ее акустическую мощность (например, приведенная к нормированному расстоянию 1 метр). Такая процедура повторяется для всех анализируемых частотных поддиапазонов Δƒi, при этом определяется - принадлежит i-тый анализируемый источник подводного шума исследуемому шумящему объекту или нет, в частности в рассматриваемом примере только первый и третий источники принадлежали исследуемому объекту.
Таким образом, в данном способе в отличие от прототипа на корпусе шумящего объекта с высокой точностью определяются координаты зон излучения конкретных источников, их частотные диапазоны, акустическая мощность излучения и тем самым вклад в первичное акустическое поле шумящего объекта измерения в том числе в условиях зашумленных заводских акваторий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат, диаграмм направленности и акустической мощности зон излучения на корпусе движущегося шумящего объекта | 2022 |
|
RU2799388C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПЕРВИЧНЫХ ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ШУМЯЩЕГО ОБЪЕКТА | 2006 |
|
RU2329474C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЕЙ И ГОРИЗОНТАЛЬНОЙ НАПРАВЛЕННОСТИ ШУМОВ МОРСКОГО НЕФТЕГАЗОВОГО КОМПЛЕКСА | 2011 |
|
RU2480781C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ГИДРОАКУСТИЧЕСКИХ ВОЗДЕЙСТВИЙ | 2014 |
|
RU2577791C1 |
| СПОСОБ РАДИОЛОКАЦИИ НА ОСНОВЕ МНОГОПОЗИЦИОННЫХ СИСТЕМ ПЕРЕДАЧИ И ПРИЕМА | 2024 |
|
RU2840797C1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| Способ скрытного гидроакустического поиска автономного донного подводного объекта | 2021 |
|
RU2762349C1 |
| Способ пеленгования движущегося источника излучения при воздействии импульсных помех | 2023 |
|
RU2810703C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 1995 |
|
RU2105991C1 |
| Способ обнаружения шумящих в море объектов | 2021 |
|
RU2780408C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано для исследования структуры первичных гидроакустических полей надводных и подводных морских шумящих объектов (ШО). Сущность: способ заключается в расположении гидроакустического приемного модуля с комбинированным гидроакустическим приемником в заданной области натурного водоема и измерении акустической мощности излучения шумящего объекта, рассчитываемой на компьютере, в проходящей через него и приемный модуль плоскости измерений. При этом приемный модуль и шумящий объект размещают в натурном водоеме так, чтобы приемный модуль в момент выполнения измерений находился в створе корпуса шумящего объекта на удалении не более половины его длины, определяют их взаимное пространственное положение, рассчитывают по измеренным параметрам гидроакустического поля узкополосный спектр акустической мощности и по нему находят требующие детального анализа дискретные и узкополосные диапазоны частот. В выбранных диапазонах частот в плоскости измерений рассчитывают диаграммы пространственного распределения потоков акустической мощности, по диаграммам, зная взаимное пространственное положение шумящего объекта и приемного модуля, определяют углы прихода звуковой энергии от соответствующей зоны излучения шумящего объекта на приемный модуль и рассчитывают координаты и акустическую мощность излучения зон на корпусе шумящего объекта, причем узкополосный спектр акустической мощности рассчитывают с единичной шириной полосы анализа (частотным разрешением) не более одной пятой наименьшей разности соседних дискретных и/или узкополосных частот в спектре. Технический результат: повышение точности определения координат на корпусе зон излучения источников шумящего объекта, их частотных диапазонов, акустической мощности излучения и вкладов в первичное акустическое поле объекта измерения, в том числе в условиях зашумленных заводских акваторий при проведении швартовных испытаний. 5 з.п. ф-лы, 2 ил.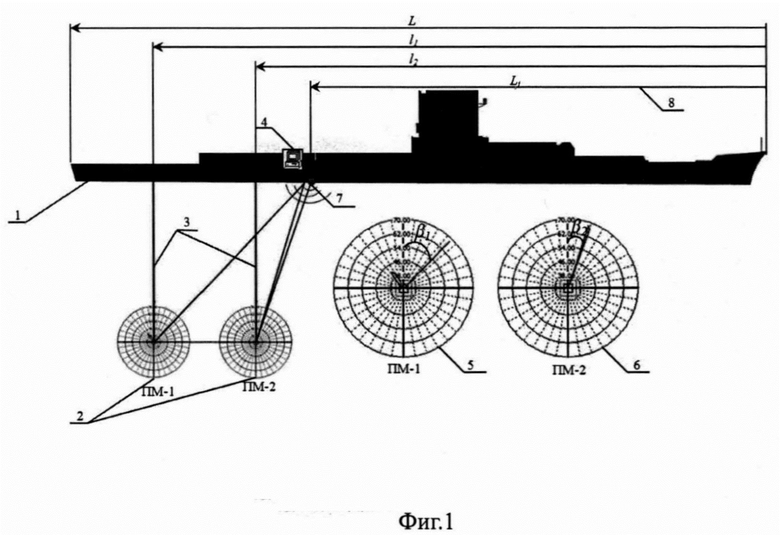
1. Способ исследования структуры первичных гидроакустических полей шумящего объекта, заключающийся в размещении гидроакустического приемного модуля с комбинированным гидроакустическим приемником в заданной области натурного водоема, измерении компонент вектора колебательной скорости и акустического давления шумящего объекта и расчете акустической мощности излучения в проходящей через объект и приемный модуль плоскости измерений, отличающийся тем, что приемный модуль и шумящий объект размещают в натурном водоеме так, чтобы приемный модуль в момент выполнения измерений находился в створе корпуса шумящего объекта на удалении не более половины его длины, определяют их взаимное пространственное положение, исходя из геометрии размещения шумящего объекта и приемного модуля, рассчитывают по измеренным параметрам гидроакустического поля узкополосный спектр акустической мощности, по нему находят требующие детального анализа дискретные и узкополосные диапазоны частот, в выбранных диапазонах частот в плоскости измерений рассчитывают диаграммы пространственного распределения потоков акустической мощности, по диаграммам, зная взаимное пространственное положение шумящего объекта и приемного модуля, определяют углы прихода звуковой энергии от соответствующей зоны излучения шумящего объекта на приемный модуль и рассчитывают координаты и акустическую мощность излучения зон на корпусе шумящего объекта.
2. Способ по п. 1, отличающийся тем, что при измерениях применяют несколько приемных модулей, расположенных в различных местах натурного водоема.
3. Способ по пп. 1 и 2, отличающийся тем, что взаимное пространственное положение приемного модуля и шумящего объекта измерений определяют, используя реперные гидроакустические и/или вибрационные излучатели, размещаемые с известными координатами на шумящем объекте измерений.
4. Способ по пп. 1-3, отличающийся тем, что взаимное пространственное положение приемного модуля и шумящего объекта определяют, измеряя пространственное положение измерительных осей комбинированного гидроакустического приемника приемного модуля и курсовой угол шумящего объекта измерений в геодезической системе координат, используя данные магнитных компасов, установленных в приемном модуле и на борту шумящего объекта.
5. Способ по пп. 1-4, отличающийся тем, что на стояночных режимах в условиях зашумленных акваторий, в том числе при проведении заводских швартовных испытаний, приемный модуль размещают в натурном водоеме, опуская его с борта исследуемого шумящего объекта в определенном месте корпуса.
6. Способ по пп. 1-5, отличающийся тем, что узкополосный спектр акустической мощности рассчитывают с частотным разрешением  где δƒ - единичная ширина полосы при расчете узкополосного спектра, ƒi - среднее значение дискретных или узкополосных диапазонов частот в спектре, N - общее число дискретных и узкополосных диапазонов частот в спектре.
где δƒ - единичная ширина полосы при расчете узкополосного спектра, ƒi - среднее значение дискретных или узкополосных диапазонов частот в спектре, N - общее число дискретных и узкополосных диапазонов частот в спектре.
| СПОСОБ ИССЛЕДОВАНИЯ ПЕРВИЧНЫХ ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ШУМЯЩЕГО ОБЪЕКТА | 2006 |
|
RU2329474C2 |
| Способ получения тетра-(а -тиенил)-боркалия | 1956 |
|
SU106396A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЕЙ ДАВЛЕНИЯ ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ПЛАВСРЕДСТВА | 1997 |
|
RU2141739C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЕЙ И ГОРИЗОНТАЛЬНОЙ НАПРАВЛЕННОСТИ ШУМОВ МОРСКОГО НЕФТЕГАЗОВОГО КОМПЛЕКСА | 2011 |
|
RU2480781C2 |
| РУПОРНАЯ АНТЕННА | 2001 |
|
RU2220483C2 |

