Настоящее изобретение относится к шарнирно-сочлененному запястью робота, содержащему:
первый корпус, содержащий первый и второй концы, при этом первый конец первого корпуса выполнен с возможностью установки на элементе робота, выполненном с возможностью вращения вокруг первой оси;
второй корпус, содержащий первый и второй концы, причем первый конец второго корпуса установлен на втором конце первого корпуса с возможностью вращения вокруг второй оси, наклоненной относительно первой оси;
третий корпус, содержащий первый и второй концы, при этом первый конец третьего корпуса установлен на втором конце второго корпуса с возможностью вращения вокруг третьей оси, наклоненной относительно второй оси,
причем первая и третья оси по существу ортогональны второй оси, при этом по меньшей мере в одном положении запястья робота первая и третья оси по существу выровнены друг с другом;
причем первый корпус содержит по существу локтевой участок, имеющий в основании первое отверстие, направленное ко второму и третьему корпусам, и которое по существу выровнено с первой осью в собранном состоянии запястья;
при этом локтевой участок имеет смещенный участок, по существу расположенный бок о бок и на расстоянии относительно оси первого отверстия и на котором обеспечен второй конец первого корпуса;
причем второй корпус содержит консольный участок, соответствующий второму концу второго корпуса, который имеет второе отверстие, по существу выровненное с третьей осью, при этом в собранном состоянии запястья робота в первое и второе отверстия пропущены кабели и/или трубки для подачи питания и/или управления устройством, связанным с третьим корпусом запястья робота,
причем запястье робота дополнительно содержит средства для приведения во вращение второго и третьего корпусов вокруг второй и третьей оси соответственно, при этом средство для приведения во вращение второго и третьего корпусов содержит:
первый и второй электродвигатели, установленные на смещенном участке первого корпуса,
первое зубчатое средство для передачи вращения выходного вала первого электродвигателя на второй корпус, и второе зубчатое средство для передачи вращения выходного вала второго двигателя на третий корпус.
Запястье робота вышеописанного типа описано, например, в заявке на Европейский патент 1938930 А1 и Европейском патенте 2022690 В1.
Задачей настоящего изобретения является усовершенствование запястья робота этого типа, в частности путем создания более компактной конструкции и уменьшенной и более надежной кинематической цепи.
Вышеуказанная задача достигается посредством обеспечения запястья робота, имеющего признаки, приведенные в пункте 1 формулы изобретения.
Формула изобретения является неотъемлемой частью описания настоящего изобретения.
Далее следует более подробное описание неограничивающего варианта настоящего изобретения со ссылками на приложенные чертежи, на которых:
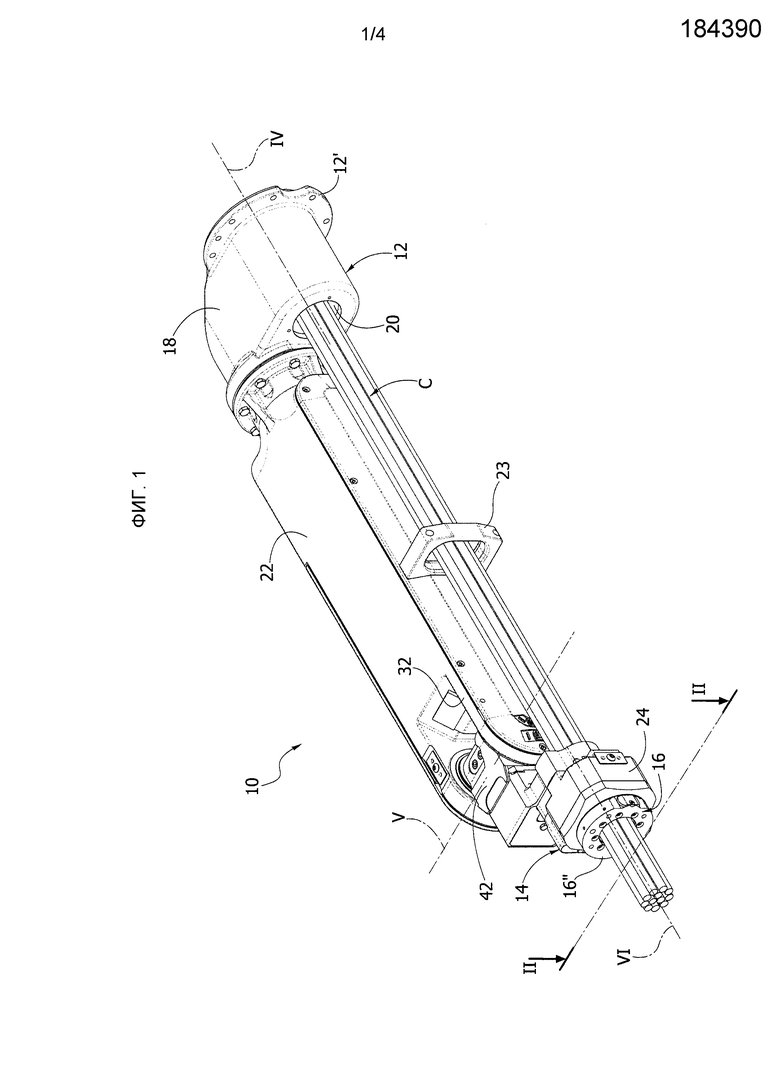
фиг.1 представляет собой вид в перспективе описываемого ниже запястья робота;
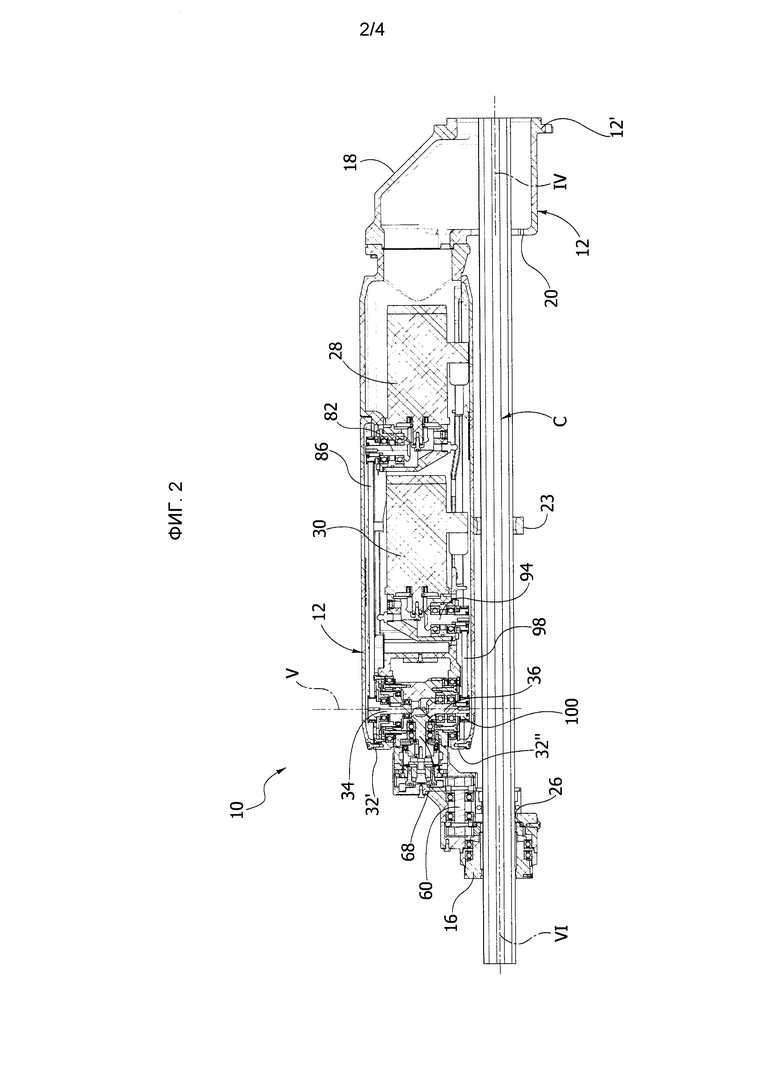
фиг.2 представляет собой продольное сечение по линии II-II на фиг.1;
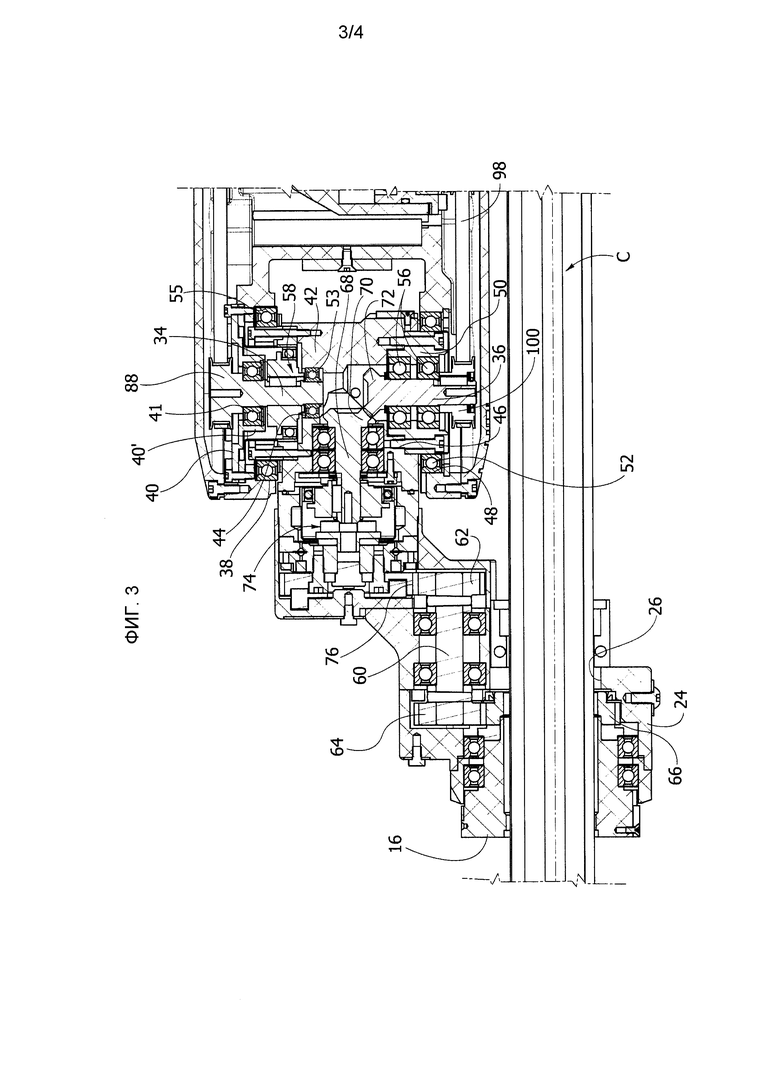
фиг.3 представляет собой фрагмент фиг.2 в увеличенном масштабе;
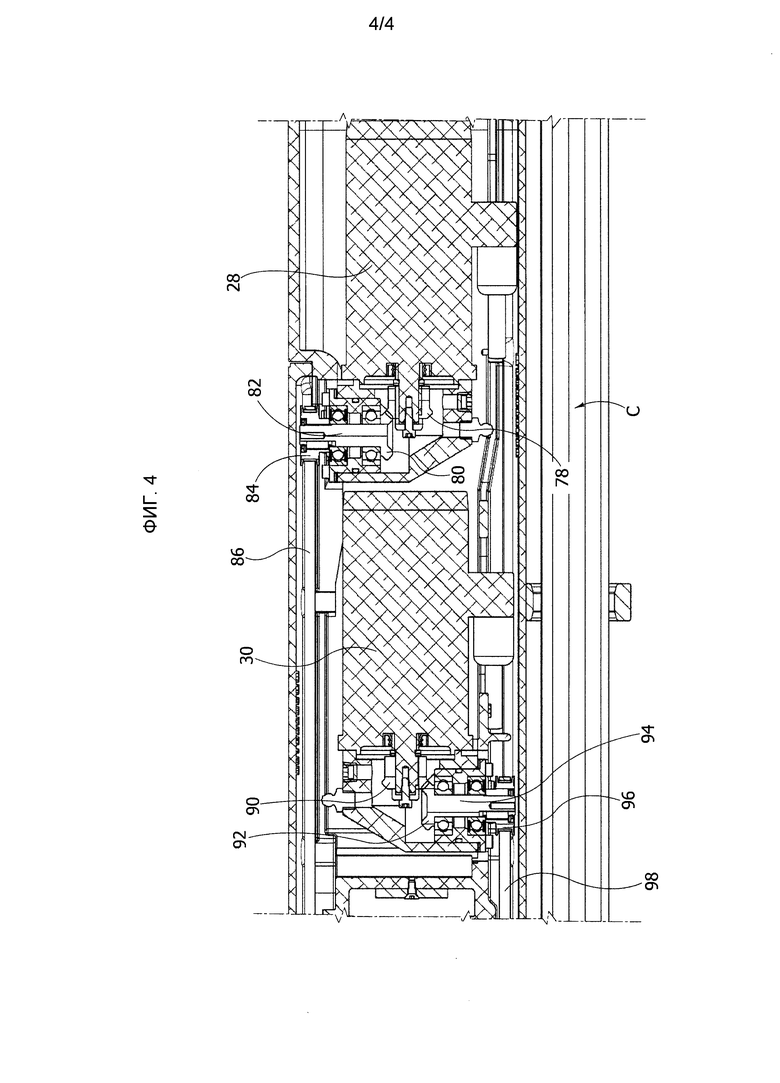
фиг.4 представляет собой другой фрагмент фиг.2 в увеличенном масштабе.
В нижеследующем описании описаны различные конкретные детали, способствующие полному пониманию принципов настоящего изобретения. Варианты настоящего изобретения, однако, могут не содержать одной или более из этих конкретных деталей, или такие детали могут быть получены другими способами, выполненными из других элементов или материалов и т.п.
В других случаях известные конструкции, материалы или операции подробно не показаны или не описаны, чтобы не затруднять описание подробностями различных аспектов настоящего изобретения.
Таким образом, ссылки, приведенные ниже, использованы лишь для удобства и не определяют объем защиты вариантов настоящего изобретения.
На чертежах позицией 10 обозначено шарнирно-сочлененное запястье робота. Как известно специалистам, робот такого типа устанавливается на элемент робота и снабжается инструментом или другим рабочим устройством, питание для которого и управление которым осуществляется по кабелям и/или трубкам, которые непосредственно соединены с конструкцией самого запястья. Эти кабели и/или трубки на чертежах показаны схематично и обозначены позицией С. Они определяют так называемый «жгут» запястья робота, и после того, как кабели и/или трубки будут установлены на запястье, такое запястье называют «ожгутованным». Эти аспекты далее подробно не описываются, поскольку они известны специалистам и будут поясняться только в той степени, которая необходима для описания запястья по настоящему изобретению.
Запястье 10 содержит первый корпус 12, имеющий первый конец 12' и второй конец 32. Первый конец 12' устанавливается на элемент робота (не показан), выполненный с возможностью вращения вокруг первой оси IV.
Запястье 10 также содержит второй корпус 14, имеющий первый конец 42 и второй конец 24. Первый конец 42 установлен на конце 32 корпуса 12 с возможностью вращения вокруг второй оси V, наклоненной относительно первой оси IV. Кроме того, запястье 10 робота содержит третий корпус 16, имеющий первый конец и второй конец, обозначенный позицией 16". Как показано на чертежах, предпочтительно третий корпус 16 является кольцевым корпусом, в котором проходят кабели и/или трубки инструмента, соединенного с запястьем, и конец 16" которого имеет поверхность, на которой сформированы соответствующие посадочные места для установки такого инструмента.
Первый конец корпуса 16 установлен на втором конце 24 корпуса 14 с возможностью вращения вокруг третьей оси VI, наклоненной относительно второй оси V.
Оси IV и VI образуют угол приблизительно 90° относительно второй оси V (другими словами, обе оси IV и VI по существу ортогональны оси V). Как показано на чертежах, в данных положениях в пространстве запястья робота эти оси по существу выровнены друг с другом. В частности, конфигурация, показанная на чертежах, сохраняется для всех положений запястья, которые, по сравнению с показанными, смещены в результате только вращения запястья вокруг оси IV.
Следует отметить, что в настоящем описании, когда указывается ортогональное соотношение между двумя осями или прямыми, это может относиться как к случаю, когда прямые или оси пересекают друг друга и перпендикулярны друг другу, так и к случаю, когда прямые или оси не пересекают друг друга, но их проекции на общей плоскости, параллельной им, образуют угол, по существу равный 90°.
Более конкретно, первый корпус 12 содержит по существу локтевой корпус 18, который в своем основании имеет отверстие 20, обращенное ко второму корпусу 14 и третьему корпусу 16. Когда запястье собрано, отверстие 20 расположено по существу выровненным с первой осью IV. Кроме того, локтевой участок имеет смещенный участок 22, по существу расположенный бок о бок и на расстоянии от оси отверстия 20. На этом смещенном участке установлен второй корпус 14 с возможностью вращения вокруг второй оси V. Второй корпус имеет консольный участок 24, соответствующий упомянутому выше второму концу второго корпуса 14, который имеет второе отверстие 26, по существу выровненное с третьей осью VI. Когда робот собран и жгут проложен, через первое отверстие 20 и второе отверстие 26 проходят кабели и/или трубки С инструмента, соединенного с третьим корпусом 16. Как видно на фиг.1, благодаря общей конфигурации, определяемой участками 18 и 22, образован канал для кабелей и/или трубок С так, чтобы они не мешали работе самого запястья. Для этого на стороне участка 22, обращенной к отверстиям 20, 26, установлен кронштейн 23, через который проходят кабели и/или трубки. Этот кронштейн выполняет функцию удержания кабелей и трубок в пределах поперечного габарита участка 22 в тех конфигурациях запястья, в которых второй корпус 14 повернут так, что отверстие 26 смещено из положения, выровненного с отверстием 20. Кроме того, когда робот собран и жгут проложен, кабели и/или трубки С на участке своей длины проходят по существу по оси IV, а на другом участке своей длины по существу по оси VI. Такое расположение позволяет уменьшить до минимума напряжение при кручении и напряжение при изгибе, которые действуют на кабели, когда запястье робота совершает маневры.
В описываемом запястье робота средства для приведения во вращение второго корпуса 14 и третьего корпуса 16 установлены непосредственно на конструкции самого запястья. В частности, эти приводные средства содержат первый электродвигатель 28 и второй электродвигатель 30, которые установлены на смещенном участке 22 первого корпуса 12. Как будет описано более подробно ниже, эти приводные средства также содержат первое зубчатое средство для передачи вращения выходного вала первого двигателя на второй корпус и второе зубчатое средство для передачи вращения выходного вала второго двигателя 30 на третий корпус 16.
В описываемом запястье робота на конце смещенного участка 22, противоположном локтевому участку 18, имеется вильчатый участок 32, соответствующий второму концу первого корпуса. Этот вильчатый участок 32 расположен бок о бок и на расстоянии относительно оси отверстия 20 и на нем установлен второй корпус 14 с возможностью поворота вокруг второй оси V.
Как будет показано ниже, такая конфигурация смещенного участка позволяет использовать кинематическую цепь для передачи движений от электродвигателей 28 и 30, соответственно на второй корпус 14 и третий корпус 16, которая очень проста и компактна, и передача движений на второй и третий корпуса осуществляется по двум разным «маршрутам», что повышает надежность всей кинематической цепи.
В различных вариантах осуществления, как и в варианте, показанном на чертежах, первое трансмиссионное средство содержит первый вал 34, установленный с возможностью вращения в первом рычаге 32' вильчатого участка 32. Как видно на фиг.3, первый рычаг 32' имеет отверстие 38, закрытое пластиной 40, привинченной болтами к краю этого отверстия и которая имеет центральный участок 40' с отверстием, поддерживающим вал 34, выполненный с возможностью вращения вокруг второй оси V и установленный в подшипниковом элементе 41. Как будет подробнее описано ниже, вал 34 соединен для вращения с первым электродвигателем 28 и выполнен с возможностью приведения во вращение второго корпуса 14.
В свою очередь, второе трансмиссионное средство содержит вал 36, установленный с возможностью вращения во втором рычаге 32" вильчатого участка на одной оси с валом 34. Как будет подробнее описано ниже, второй вал соединен для вращения со вторым электродвигателем 30 и выполнен с возможностью приведения во вращение третьего корпуса 16.
Второй корпус 14 содержит базовый кожух 42, соответствующий первому концу второго корпуса, который размещен в пространстве между первым и вторым рычагами вильчатого участка и удерживается там с возможностью вращения. Более конкретно, кожух 42 имеет две противоположные стороны с первым отверстием 44 и вторым отверстием 46, в которых соответственно размещены вал 34 и вал 36, установленные в подшипниковых элементах 53 и 56. В частности, на стороне второго рычага 32" вилки к кожуху 42 привинчена болтами втулка 50, которая закрывает отверстие 46 и в которой на подшипниковых элементах 56 установлен вал 36. Эта же втулка 50 установлена с возможностью вращения в подшипниковом элементе 52, который установлен в отверстии 48, выполненном во втором рычаге 32" вилки, при этом отверстие 48 является по существу зеркальным относительно отверстия 38 в первом рычаге. Подшипниковый элемент 52 также работает как элемент упора на одной стороне кожуха 42 и аналогично подшипниковый элемент 55, установленный в отверстии 38 рычага 32' вилки, работает как элемент упора на противоположной стороне кожуха.
Кожух 42 приводится во вращение валом 34. Более конкретно, между валом 34 и кожухом 42 установлено редукторное средство 58, которое поддерживается подшипниковым элементом 55 и выполнено с возможностью соединения для вращения вала 34 с кожухом 42. Редукторное средство, показанное на чертежах, является волновым редуктором конкретного типа, который обычно используется в робототехнике и поэтому подробно не описывается. В любом случае, совершенно очевидно, что показанное редукторное средство является просто примером и вместо него можно установить редукторное средство любого другого типа, обычно применяемого в этой отрасли техники.
Кожух 42 дополнительно содержит трансмиссионное средство (которое будет более подробно описано ниже), выполненное с возможностью передачи вращения второго вала 36 на последующие трансмиссионные элементы, которые расположены в консольном участке 24 и выполнены с возможностью приведения в движение третьего корпуса 16.
В различных вариантах осуществления изобретения, как и в показанном, внутри консольного участка 24 второй корпус 16 содержит вал 60, который установлен с возможностью свободного вращения вокруг оси, параллельной третьей оси VI. Вал 60 соединен для вращения с трансмиссионным средством и, в свою очередь, передает вращение на третий корпус 16. В частности, вал 60 имеет первый конец, на котором установлено зубчатое колесо 62, находящееся в зацеплении с трансмиссионным средством, и второй конец, противоположный первому, на котором установлено зубчатое колесо 64, находящееся в зацеплении с зубчатым колесом 66, установленным на третьем корпусе 16. Следует отметить, что благодаря валу 60 третий корпус 16, а также концевую часть участка 24, поддерживающего третий корпус 16, можно вынести дальше вперед относительно вильчатого участка 32, чтобы расстояние между второй осью V и отверстием 26 консольного участка 24 уменьшало до минимума напряжение при кручении и/или напряжение при изгибе на кабелях и/или трубках С, проходящих через отверстие 26, которые могут возникать при повороте второго корпуса 14 вокруг второй оси V.
В различных вариантах настоящего изобретения так же, как и в показанном, трансмиссионное средство, описанное выше, содержит вал 68, установленный в кожухе 42 с возможностью вращения вокруг оси, параллельной третьей оси VI, и расположенный на противоположной стороне относительно вала 60. Вал 68 имеет первый конец с коническим зубчатым колесом 70, которое находится в зацеплении с соответствующим зубчатым колесом, установленным на валу 36. Кроме того, такое трансмиссионное средство может содержать редукторное средство 74, которое своим входом соединено со вторым концом вала 68, противоположным первому концу. Своим выходом редукторное средство 74 соединено с зубчатым колесом 76, которое находится в зацеплении с зубчатым колесом 62, установленным на валу 60. Редукторное средство, показанное на чертежах, является волновым редуктором конкретного типа, который обычно используется в робототехнике и поэтому подробно не описывается. В любом случае, совершенно очевидно, что редукторное средство показано лишь для примера и вместо него можно применять редукторное средство любого другого типа, обычно используемого в этой области техники.
Как показано на фиг.2 и 4, первый электродвигатель 28 и второй электродвигатель 30 установлены внутри смещенного участка 22 и по существу выровнены друг с другом. Выходные валы электродвигателей 28 и 30 соединены с валами 34 и 36 соответствующими ременными передачами. В частности, коническое зубчатое колесо 78 закреплено на выходном валу электродвигателя 28 и находится в зацеплении с коническим зубчатым колесом 80, установленным на валу 82, который установлен внутри смещенного участка 22 с возможностью вращения вокруг оси, параллельной второй оси V и отнесенной от нее. На конце вала 82, противоположном зубчатому колесу 80, установлен шкив 84, который соединен для вращения приводным ремнем 86 со шкивом 88, установленным на валу 34. Аналогично на выходном валу второго электродвигателя 30 закреплено коническое зубчатое колесо 90, которое находится в зацеплении с коническим зубчатым колесом 92, установленным на валу 94, находящемся в смещенном участке 22 на стороне этого участка, противоположной валу 82. Вал 94 выполнен с возможностью вращения вокруг оси, параллельной второй оси V и отнесенной от нее. На конце вала 94, противоположном зубчатому колесу 92, установлен шкив 96, который соединен для вращения приводным ремнем 98 со шкивом 100, установленным на валу 36.
Ввиду вышеизложенного передача движения на второй и третий корпус, соответственно для вращения вокруг осей V и VI, осуществляется следующим образом.
Когда первый электродвигатель 28 включается, вал 82 вращается так, чтобы приводить во вращение вал 34 посредством ремня 86. Вал 34 передает вращение на редукторное средство 38, которое осуществляет умножение крутящего момента, и передает вращение непосредственно на кожух 42 второго корпуса 14.
Аналогично при включении второго электродвигателя 30 вал 94 вращается и через ремень 98 приводит во вращение вал 36. Вал 36 передает вращение на вал 68, который приводит в действие редукторное средство 74. Редукторное средство 74 умножает крутящий момент и передает вращение на зубчатое колесо 76. В свою очередь, зубчатое колесо 76 вращает вал 60 и зубчатое колесо 64, которое, находясь в зацеплении с зубчатым колесом 66, приводит во вращение третий корпус 16.
Следует отметить, что во время вращения второго корпуса 14 вал 68 вынужден совершать колебания относительно вала 36. Поскольку эти два вала соединены для вращения, такие колебания стремятся повернуть вал 68 вокруг его оси и вызвать нежелательное движение третьего корпуса. Чтобы устранить этот недостаток, во время колебаний вала 68 вторым электродвигателем 30 управляют так, чтобы он вращал вал 36 для гашения колебания, чтобы вал 69 не вращался вокруг своей оси. Очевидно, что в случаях, когда требуется одновременное движение второго и третьего корпуса, электродвигателем 30 управляют так, чтобы вал 36 мог передавать вращение на вал 68 в соответствии с требуемым движением третьего корпуса.
В заключение следует отметить, что вышеупомянутые электродвигатели 28, 30 не были подробно описаны, поскольку они могут быть электродвигателями любого типа, обычно применяемого в робототехнике. Кроме того, некоторые детали конструкции, показанные на чертежах, не были подробно описаны во избежание ненужного усложнения описания, однако они совершенно очевидны для специалистов в данной области техники.
Хотя принципы настоящего изобретения остаются теми же, детали конструкции и варианты могут изменяться в широких пределах относительно приведенного выше примера, не выходя за пределы объема изобретения, определенного приложенной формулой.
Изобретение относится к шарнирно-сочлененному запястью (10) робота, которое содержит первый корпус (12), второй корпус (14) и третий корпус (16). Причем первый корпус (12) содержит первый и второй концы, при этом первый конец первого корпуса (12) выполнен с возможностью установки на элементе робота, выполненном с возможностью вращения вокруг первой оси (IV). Второй корпус (14) содержит первый и второй концы, причем первый конец второго корпуса (14) установлен на втором конце первого корпуса (12) с возможностью вращения вокруг второй оси (V), наклоненной относительно первой оси (IV). Третий корпус (16) содержит первый и второй концы, при этом первый конец третьего корпуса установлен на втором конце второго корпуса (14) с возможностью вращения вокруг третьей оси (VI), наклоненной относительно второй оси (V). Причем первая и третья оси (IV, VI) образуют угол, равный 90° относительно второй оси (V), при этом по меньшей мере в одном положении запястья робота первая и третья оси выровнены друг с другом. Изобретение направлено на создание компактной конструкции и уменьшенной и более надежной кинематической цепи. 9 з.п. ф-лы, 4 ил.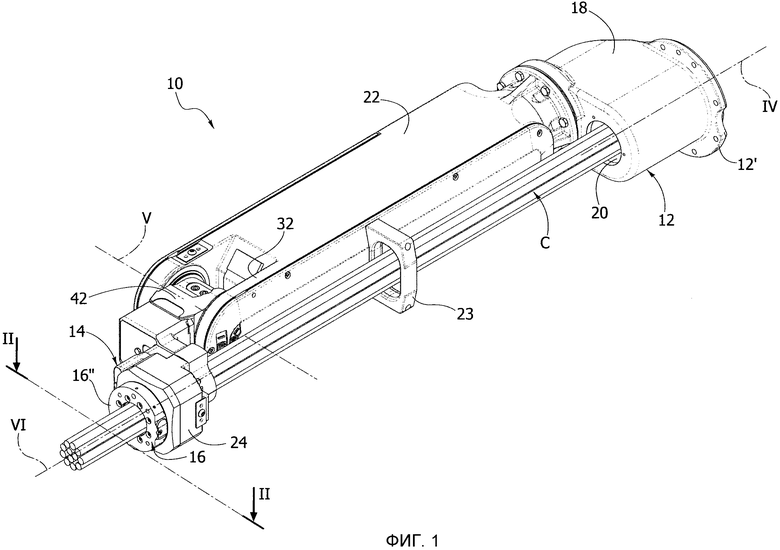
1. Шарнирно-сочлененное запястье (10) робота, содержащее:
первый корпус (12), содержащий первый и второй концы, при этом первый конец первого корпуса (12) выполнен с возможностью установки на элементе робота, выполненном с возможностью вращения вокруг первой оси (IV);
второй корпус (14), содержащий первый и второй концы, причем первый конец второго корпуса (14) установлен на втором конце первого корпуса (12) с возможностью вращения вокруг второй оси (V), наклоненной относительно первой оси (IV);
третий корпус (16), содержащий первый и второй концы, при этом первый конец третьего корпуса установлен на втором конце второго корпуса (14) с возможностью вращения вокруг третьей оси (VI), наклоненной относительно второй оси (V),
причем первая и третья оси (IV, VI) ортогональны второй оси (V), при этом по меньшей мере в одном положении запястья робота первая и третья оси выровнены друг с другом;
причем первый корпус содержит локтевой участок (18), имеющий основание с первым отверстием (20), обращенным ко второму и третьему корпусам и расположенным выровненным с первой осью (IV) в собранном состоянии запястья робота;
при этом локтевой участок имеет смещенный участок (22), смещенный относительно первого отверстия (20), причем второй конец первого корпуса расположен на смещенном участке;
при этом второй корпус содержит консольный участок, соответствующий второму концу второго корпуса, который имеет второе отверстие (26), выровненное с третьей осью (VI), причем в собранном состоянии запястья робота в первое и второе отверстия пропущены кабели и/или трубки для подачи питания и/или управления инструментом, соединенным с третьим корпусом (16) запястья робота,
при этом запястье робота дополнительно содержит средства для приведения во вращение второго и третьего корпусов (14, 16) вокруг второй и третьей оси (V, VI) соответственно, причем средства для приведения во вращение второго и третьего корпусов содержат:
первый и второй электродвигатели (28, 30), установленные на смещенном участке (22) первого корпуса,
первое зубчатое средство для передачи вращения выходного вала первого электродвигателя (28) на второй корпус (14), и второе зубчатое средство для передачи вращения выходного вала второго электродвигателя (30) на третий корпус (16),
отличающееся тем, что на конце смещенного участка (22) первого корпуса, противоположном локтевому участку, выполнен вильчатый участок (32), соответствующий второму концу первого корпуса, смещенный относительно первого отверстия (20), и на котором с возможностью вращения вокруг второй оси (V) установлен второй корпус.
2. Запястье робота по п. 1, в котором первое трансмиссионное средство содержит первый вал (34), установленный в первом рычаге (32) вильчатого участка с возможностью вращения вокруг второй оси, при этом первый вал соединен для вращения с первым электродвигателем (28) и выполнен с возможностью приведения во вращение второго корпуса, а
второе трансмиссионное средство содержит второй вал (34), установленный с возможностью вращения во втором рычаге (23") вильчатого участка и выровненный с первым валом, причем второй вал соединен для вращения со вторым электродвигателем (30) и выполнен с возможностью приведения во вращение третьего корпуса (14).
3. Запястье робота по п. 1 или 2, в котором первый и второй электродвигатели выровнены друг с другом в смещенном участке.
4. Запястье робота по п. 2, в котором первый вал соединен для вращения с первым электродвигателем ременной передачей.
5. Запястье робота по п. 2, в котором второй вал соединен для вращения со вторым электродвигателем ременной передачей.
6. Запястье робота по п. 2, в котором в консольном участке второй корпус содержит вал (60), установленный с возможностью вращения вокруг оси, параллельной третьей оси, и соединенный для вращения со вторым валом (36) зубчатыми средствами, образующими часть второго трансмиссионного средства,
при этом на первом конце вала (60) консольного участка установлено зубчатое колесо (62), зацепленное зубчатыми средствами, а на втором конце, противоположном первому концу, установлено зубчатое колесо (64), зацепляющее зубчатое колесо (66), жестко соединенное с третьим корпусом.
7. Запястье робота по п. 2, в котором второй корпус содержит базовый кожух (42), соответствующий первому концу второго корпуса, размещенный в пространстве между первым и вторым рычагами (32′, 32″) вильчатого участка и поддерживаемый с возможностью вращения указанными рычагами, при этом базовый кожух (42) выполнен с возможностью вмещения первого и второго валов (34, 36), соответственно через первое и второе отверстия (44, 46) на противоположных сторонах указанного кожуха, причем первый вал приводит во вращение базовый кожух, а базовый кожух содержит зубчатые средства, выполненные с возможностью передачи вращения второго вала (36) на трансмиссионные элементы второго трансмиссионного средства, которые находятся в консольном участке второго корпуса (24).
8. Запястье робота по п. 7, в котором между базовым кожухом (42) и первым валом (34) установлено редукторное средство (58), поддерживаемое первым рычагом и выполненное с возможностью соединения для вращения первого вала с указанным кожухом.
9. Запястье робота по п. 7 или 8, в котором зубчатые средства содержат:
вал, установленный в базовом кожухе (42) с возможностью вращения вокруг оси, параллельной третьей оси (VI), и расположенный на расстоянии от нее, при этом на одном конце указанного вала зубчатых средств установлено коническое зубчатое колесо (70), зацепляющее зубчатое колесо (72), установленное на втором валу (36),
редукторное средство (74), соединенное на входе со вторым концом указанного вала зубчатых средств, а на выходе - с зубчатым колесом для передачи вращения на трансмиссионные элементы второго трансмиссионного средства, находящиеся в консольном участке второго корпуса (24).
10. Запястье робота по п. 3, в котором коническое зубчатое колесо закреплено на выходном валу первого электродвигателя и находится в зацеплении с коническим зубчатым колесом, установленным на третьем валу (82), который установлен в смещенном участке с возможностью вращения вокруг оси, параллельной второй оси (V) и расположенной на расстоянии от нее, при этом третий вал (82) на одном конце, противоположном зубчатому колесу, имеет шкив (84), который соединен для вращения посредством приводного ремня со шкивом (88), установленным на первом валу (34), а коническое зубчатое колесо (90) закреплено на выходном валу второго электродвигателя и находится в зацеплении с коническим зубчатым колесом, установленным на четвертом валу (94), который установлен в смещенном участке на стороне, противоположной третьему валу, и выполнен с возможностью вращения вокруг оси, параллельной второй оси и расположенной на расстоянии от нее, причем четвертый вал на одном конце, противоположном коническом зубчатому колесу, имеет шкив (100), соединенный для вращения посредством приводного ремня со шкивом (100), установленным на втором валу (36).
| EP 1938930 A1, 02.07.2008 | |||
| Кран-манипулятор | 1972 |
|
SU502832A1 |
| ЗАПЯСТЬЕ РУКИ РОБОТА С ШАРНИРНЫМИ СОЧЛЕНЕНИЯМИ | 2008 |
|
RU2412045C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

