Настоящее изобретение относится к шарнирно-сочлененному запястью робота, содержащему:
первый корпус, содержащий первый и второй конец, при этом первый конец первого корпуса выполнен с возможностью установки на элементе робота, выполненном с возможностью вращения вокруг первой оси;
второй корпус, содержащий первый и второй конец, причем первый конец второго корпуса установлен на втором конце первого корпуса с возможностью вращения вокруг второй оси, наклоненной относительно первой оси;
третий корпус, содержащий первый и второй конец, при этом первый конец третьего корпуса установлен на втором конце второго корпуса с возможностью вращения вокруг третьей оси, наклоненной относительно второй оси,
причем первая и третья оси, по существу, ортогональны второй оси, при этом по меньшей мере в одном положении запястья робота первая и третья оси, по существу, выровнены друг с другом;
причем первый корпус содержит, по существу, локтевой участок, имеющий в основании первое отверстие, направленное ко второму и третьему корпусам и, по существу, выровненное с первой осью в собранном состоянии запястья робота;
при этом локтевой участок имеет смещенный участок, расположенный, по существу, бок о бок и на расстоянии относительно оси первого отверстия и на котором обеспечен второй конец первого корпуса;
при этом второй корпус содержит консольный участок, соответствующий второму концу второго корпуса, который имеет второе отверстие, по существу, выровненное с третьей осью, причем в собранном состоянии запястья робота в первое и второе отверстия пропущены кабели и/или трубки для подачи питания и/или управления устройством, связанным с третьим корпусом запястья робота,
при этом запястье робота дополнительно содержит средства для приведения во вращение второго и третьего корпусов вокруг второй и третьей оси соответственно, причем средства для приведения во вращение второго и третьего корпусов содержат:
первый электродвигатель, установленный на первом корпусе,
первое зубчатое средство для передачи вращения выходного вала первого электродвигателя на второй корпус,
второй электродвигатель, установленный на втором корпусе,
второе зубчатое средство для передачи вращения выходного вала второго электродвигателя на третий корпус.
Запястье робота вышеописанного типа описано, например, в заявке на патент Японии 2006-289503.
Задачей настоящего изобретения является усовершенствование запястья робота этого типа, в частности, путем создания более компактной и простой конструкции.
Вышеуказанная задача достигается посредством обеспечения запястья робота, имеющего признаки, приведенные в пункте 1 формулы изобретения.
Формула изобретения является неотъемлемой частью описания настоящего изобретения.
Далее следует более подробное описание не ограничивающего варианта настоящего изобретения со ссылками на приложенные чертежи, на которых:
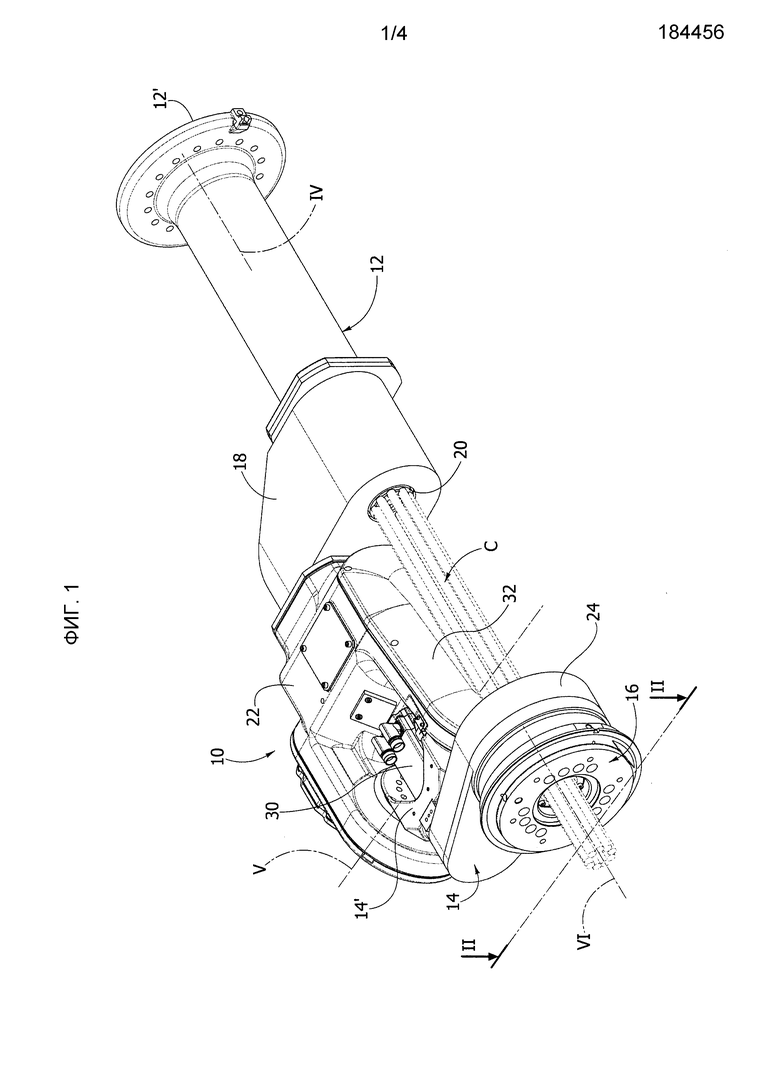
фиг.1 представляет собой вид в перспективе первого варианта описываемого ниже запястья робота;
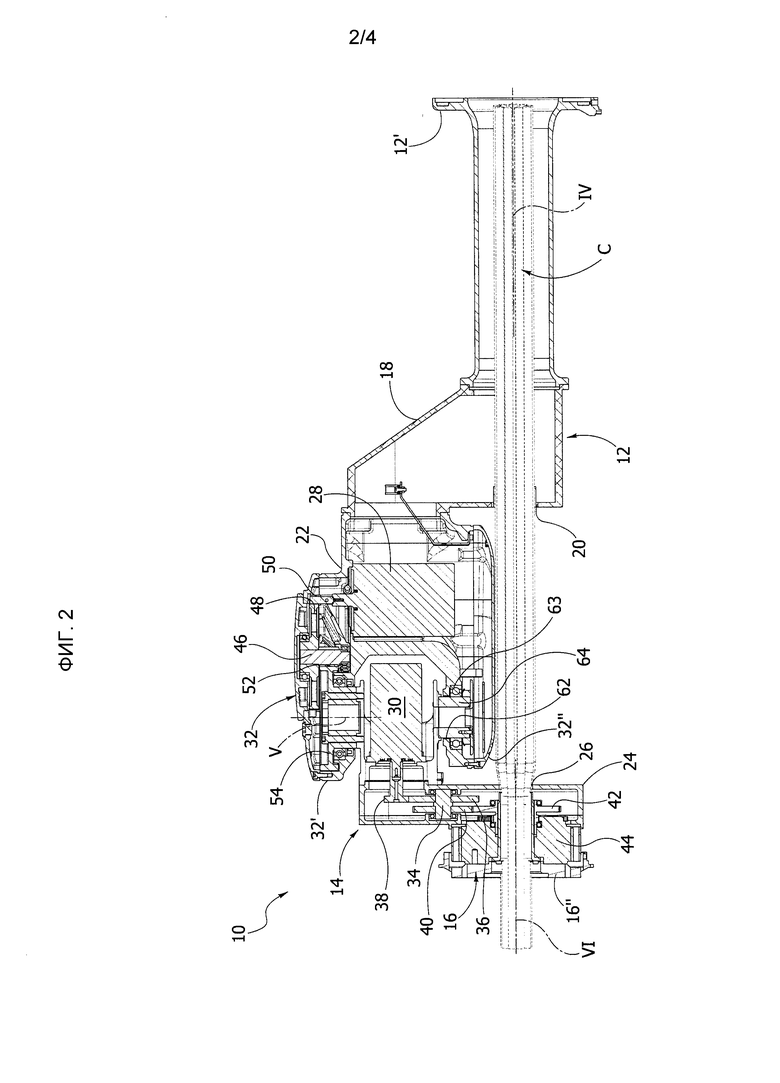
фиг.2 представляет собой продольное сечение по линии II-II на фиг.1;
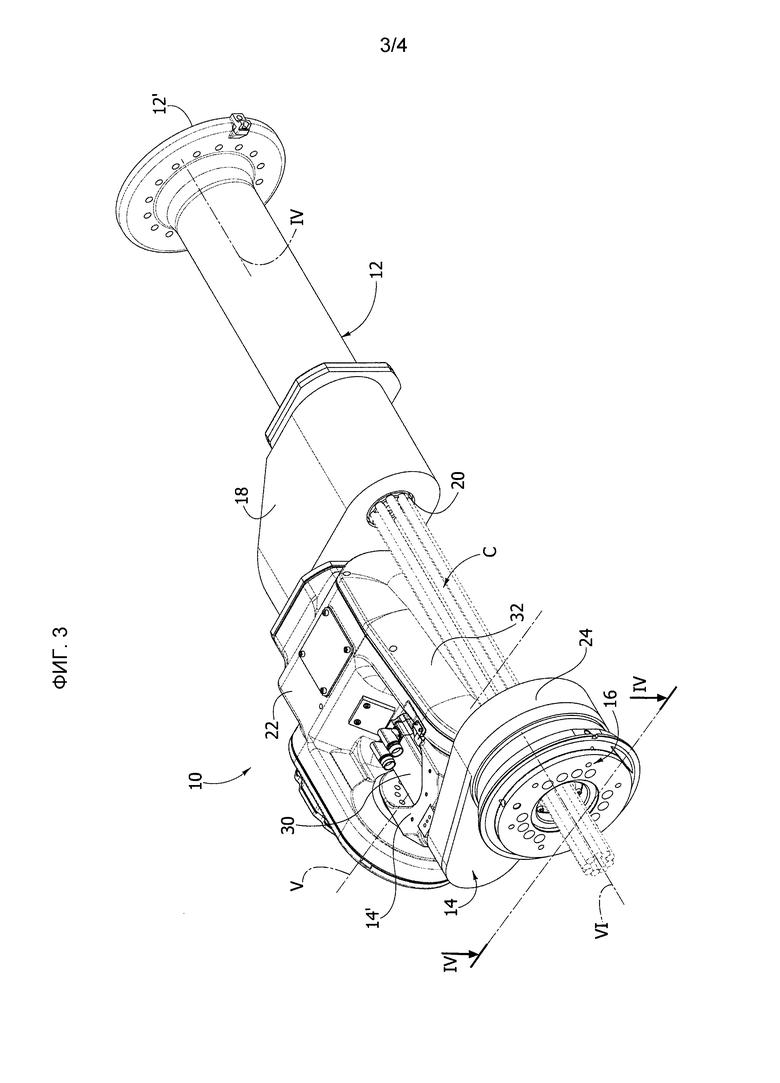
фиг.3 представляет собой вид в перспективе второго варианта описываемого ниже запястья робота;
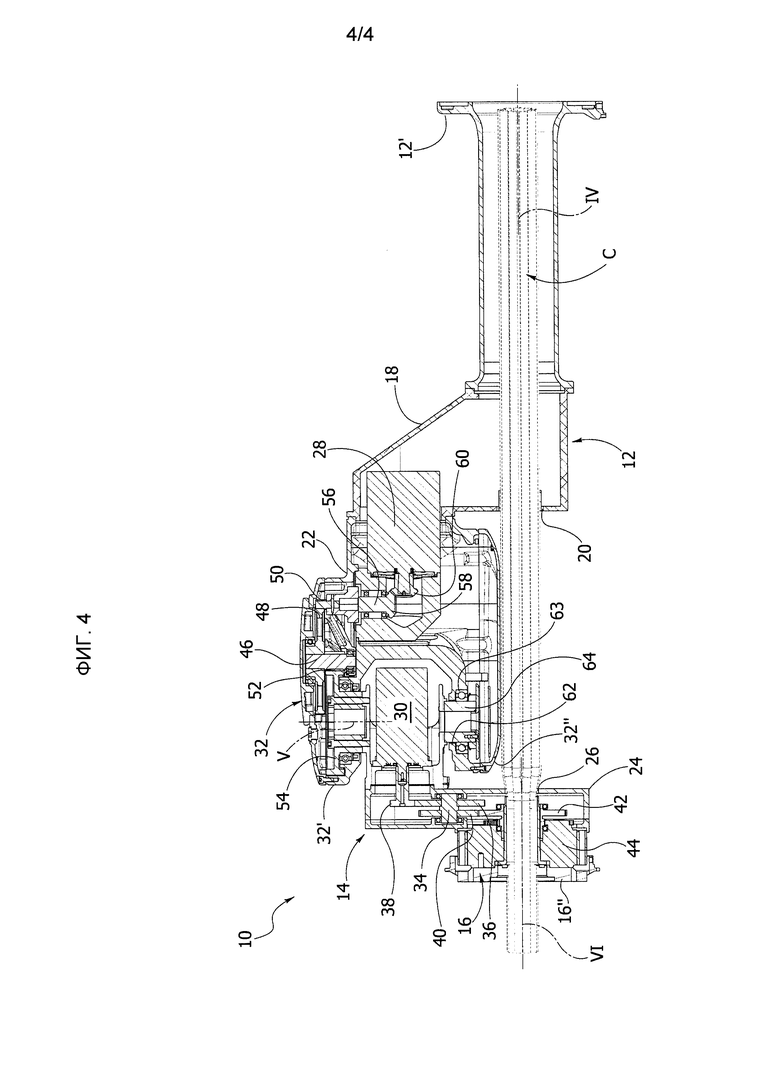
фиг.4 представляет собой продольное сечение по линии IV-IV на фиг.3.
В нижеследующем описании описаны различные конкретные детали, способствующие полному пониманию принципов настоящего изобретения. Варианты настоящего изобретения, однако, могут не содержать одной или более из этих конкретных деталей или такие детали могут быть получены другими способами, выполнены из других элементов или материалов и т.п.
В других случаях известные конструкции, материалы или операции подробно не показаны или не описаны, чтобы не затруднять описание подробностями различных аспектов настоящего изобретения.
Таким образом, ссылки, приведенные ниже, использованы лишь для удобства и не определяют объем защиты вариантов настоящего изобретения.
На чертежах позицией 10 обозначено шарнирно-сочлененное запястье робота. Как известно специалистам, робот такого типа устанавливается на элемент робота и снабжается инструментом или другим рабочим устройством, питание для которого и управление которым осуществляется по кабелям и/или трубкам, которые непосредственно соединены с конструкцией самого запястья. Эти кабели и/или трубки на чертежах показаны схематично и обозначены позицией С. Они определяют так называемый «жгут» запястья робота, и после того, как кабели и/или трубки будут установлены на запястье, такое запястье называют «ожгутованным». Эти аспекты далее подробно не описываются, поскольку они известны специалистам, и будут поясняться только в той степени, которая необходима для описания запястья по настоящему изобретению.
Запястье 10 содержит первый корпус 12, имеющий первый конец 12' и второй конец 32. Первый конец 12' устанавливается на элемент робота (не показан), выполненный с возможностью вращения вокруг первой оси IV.
Запястье 10 также содержит второй корпус 14, имеющий первый конец 14' и второй конец 24. Первый конец 14' установлен на конце 32 корпуса 12 с возможностью вращения вокруг второй оси V, наклоненной относительно первой оси IV. Кроме того, запястье 10 робота содержит третий корпус 16, имеющий первый конец и второй конец, обозначенный позицией 16". Как показано на чертежах, предпочтительно третий корпус 16 является кольцевым корпусом, в котором проходят кабели и/или трубки инструмента, соединенного с запястьем, и конец 16" которого имеет поверхность, на которой сформированы соответствующие посадочные места для установки такого инструмента.
Первый конец корпуса 16 установлен на втором конце 24 корпуса 14 с возможностью вращения вокруг третьей оси VI, наклоненной относительно второй оси V.
Оси IV и VI образуют угол приблизительно 90° относительно второй оси V (другими словами, обе оси IV и VI, по существу, ортогональны оси V). Как показано на чертежах, в данных положениях в пространстве запястья робота эти оси, по существу, выровнены друг с другом. В частности, конфигурация, показанная на чертежах, сохраняется для всех положений запястья, которые, по сравнению с показанными, смещены в результате только вращения запястья вокруг оси IV.
Следует отметить, что в настоящем описании, когда указывается ортогональное соотношение между двумя осями или прямыми, это может относиться как к случаю, когда прямые или оси пересекают друг друга и перпендикулярны друг к другу, так и к случаю, когда прямые или оси не пересекают друг друга, но их проекции на общей плоскости, параллельной им, образуют угол, по существу, равный 90°.
Более конкретно, как показано на фиг.1-4, первый корпус 12 содержит локтевой корпус 18, который в своем основании имеет отверстие 20, обращенное ко второму корпусу 14 и третьему корпусу 16. Когда запястье собрано, отверстие 20 расположено, по существу, выровненным с первой осью IV. Кроме того, локтевой участок имеет смещенный участок 22, по существу, расположенный бок о бок и на расстоянии от оси отверстия 20. На этом смещенном участке установлен второй корпус 14 с возможностью вращения вокруг второй оси V. Этот второй корпус имеет консольный участок 24, соответствующий вышеуказанному второму концу второго корпуса 14, который имеет второе отверстие 26, по существу, выровненное с третьей осью VI. Когда запястье робота собрано и жгут проложен, через первое отверстие 20 и второе отверстие 26 проходят кабели и/или трубки С инструмента, связанного с третьим корпусом 16. Как видно на фиг.1, благодаря общей конфигурации, определяемой участками 18 и 22, сформирован канал для кабелей и/или трубок С так, чтобы эти кабели и трубки удерживались в пределах поперечного габарита запястья робота и не мешали работе самого запястья. Кроме того, когда запястье робота собрано и жгут проложен, кабели и/или трубки С на участке своей длины проходят, по существу, по оси IV, а на другом участке своей длины - по существу, по оси VI. Такое расположение позволяет уменьшить до минимума напряжение при кручении и напряжение при изгибе, которые действуют на кабели, когда запястье робота совершает маневры.
В описываемом запястье робота средства для приведения во вращение второго корпуса и третьего корпуса установлены непосредственно на конструкции самого запястья. В частности, приводные средства содержат первый электродвигатель 28, установленный на первом корпусе 12 и приводящий во вращение второй корпус 14. Приводные средства также содержат второй электродвигатель 30, который установлен на втором корпусе 14 и приводит во вращение третий корпус 16. Как описано более подробно ниже, приводные средства также содержат первое зубчатое средство для передачи вращения выходного вала первого электродвигателя на второй корпус 14 и второе зубчатое средство для передачи вращения выходного вала второго электродвигателя 30 на третий корпус 16. В различных вариантах, как и в варианте, показанном на чертежах, первый электродвигатель 28 установлен на смещенном участке 22. Кроме того, на конце смещенного участка 22, противоположном локтевому участку 18, обеспечен вильчатый участок 32, соответствующий второму концу первого корпуса. Этот вильчатый участок 32 расположен бок о бок и на расстоянии от оси отверстия 20 и на нем установлен второй корпус 14 с возможностью поворота вокруг второй оси V. В различных вариантах настоящего изобретения так же, как и показано на чертежах, второй электродвигатель 30 установлен на концевом участке 14' второго корпуса 14 между рычагами 32' и 32" вильчатого участка 32. В различных вариантах настоящего изобретения, как и в варианте, показанном на чертежах, второй корпус 14 своим концевым участком 14' находится в зацеплении с возможностью вращения с обоими рычагами 32' и 32". В различных вариантах настоящего изобретения, как в варианте, показанном на чертежах, второй электродвигатель 30 ориентирован так, что его выходной вал проходит, по существу, параллельно третьей оси VI.
Как видно на фиг.1-4, консольный участок 24 содержит вал 34, установленный с возможностью вращения вокруг оси, по существу, параллельной третьей оси VI, и расположенный между этой третьей осью VI и выходным валом второго электродвигателя 30. На валу 34 установлено зубчатое колесо 36, находящееся в зацеплении с зубчатым колесом 38, жестко соединенным с выходным валом второго электродвигателя 30, на валу 34 установлено зубчатое колесо 40, находящееся в зацеплении с зубчатым колесом 42. Зубчатое колесо 42 установлено с возможностью вращения вокруг третьей оси VI на консольном участке 24 и приводит во вращение третий корпус 16.
В различных вариантах настоящего изобретения, как и в варианте, показанном на чертежах, зубчатое колесо 42 установлено на полом валу 43, установленном на редукторном средстве 44, прикрепленном к консольному участку 24. В частности, редукторное средство 44 имеет, по существу, кольцевую форму, и в нем центрально проходит вал 43. Снаружи редукторное средство 44 прикреплено к консольному участку 24. Третий корпус 16 прикреплен к редукторному средству 44 и соединен для вращения с валом 43.
В различных вариантах настоящего изобретения, как и в варианте, показанном на чертежах, когда на запястье робота установлен жгут, через редукторное средство 44 и вал 43 проходят кабели и/или трубки С.
В различных вариантах настоящего изобретения, как и в варианте, показанном на фиг.1 и 2, электродвигатель 28 установлен на смещенном участке 22 и ориентирован так, что его выходной вал проходит, по существу, параллельно второй оси V и отнесен от нее. В предпочтительных вариантах на смещенном участке 22 с возможностью вращения вокруг оси, по существу, параллельной второй оси V, между этой осью и выходным валом электродвигателя 28 установлен вал 46. На валу 46 установлено первое зубчатое колесо 48, находящееся в зацеплении с зубчатым колесом 50, установленным на выходном валу первого электродвигателя 28. На валу 36 также имеется зубчатый участок 52, находящийся в зацеплении с зубчатым колесом 54. Зубчатое колесо 54 установлено на рычаге 32' вильчатого участка 32 с возможностью вращения вокруг второй оси V. В частности, зубчатое колесо 54 установлено с возможностью вращения на подшипниковом средстве 35. Это средство заблокировано зубчатым колесом 54, прижимающим его к краям, ограничивающим отверстие 33, выполненное в рычаге 32'. Через отверстие 33 средство для фиксации зубчатого колеса 54 зацеплено с участком 14' второго корпуса, тем самым соединяя для вращения участок 14' с зубчатым колесом 54.
В различных вариантах настоящего изобретения, как и в варианте, показанном на фиг.3 и 4, первый электродвигатель 28 установлен на смещенном участке 22 в такой ориентации, что его выходной вал проходит, по существу, параллельно первой оси IV и на расстоянии от нее. В этом варианте зубчатое колесо 50, которое находится в зацеплении с зубчатым колесом 48, установленным на валу 46, не соединено непосредственно с выходным валом первого электродвигателя 28, а установлено на валу 56. Вал 56 установлен на смещенном участке 22 с возможностью вращения вокруг оси, по существу, параллельной второй оси V, и расположен напротив нее относительно вала 46. Вал 56 через конический зубчатый участок 58 на своем конце, противоположном зубчатому колесу 50, находится в зацеплении с коническим зубчатым колесом 60, закрепленном для вращения на выходном валу первого электродвигателя 28.
В различных вариантах настоящего изобретения, как и в варианте, показанном на чертежах, рычаг 32" вильчатого участка 32, который не содержит средств для приведения второго корпуса 14, имеет отверстие 62, обращенное к пространству между рычагами 32', 32". Рычаг 32" с отверстием 62 образует канал для кабелей для подачи питания (не показаны) второго электродвигателя 30.
В различных вариантах настоящего изобретения, как и в варианте, показанном на чертежах, кольцевая опора 64 участка 14, предназначенная для пропускания через нее вышеуказанных кабелей, установлена с возможностью вращения в отверстии 62 на подшипниковом элементе 63.
Ввиду вышеизложенного передача движения на второй и третий корпус соответственно для вращения вокруг осей V и VI осуществляется следующим образом.
Когда включается первый электродвигатель 28, зубчатое колесо 50 приводит во вращение вал 46 путем зацепления с установленным на нем зубчатым колесом 48. Посредством своего зубчатого участка вал 46 приводит во вращение зубчатое колесо 54 и, следовательно, второй корпус 14.
В варианте по фиг.3 и 4 первый электродвигатель 28 приводит во вращение зубчатое колесо 50 через включение вала 56.
Когда включается второй электродвигатель 30, зацепление между зубчатым колесом 36 и зубчатым колесом 38 приводит к вращению вала 34, который передает движение на редукторное средство 44 путем зацепления между зубчатым колесом 40 и зубчатым колесом 42. Редукторное средство 44 выполняет умножение крутящего момента, передавая движение на третий корпус 16.
В заключение следует отметить, что электродвигатели 28, 30, а также редукторное средство 44 не были подробно описаны, поскольку они могут относиться к любому типу, обычно применяемому в робототехнике. Кроме того, некоторые детали конструкции, показанные на чертежах, не были подробно описаны во избежание ненужного усложнения описания, однако они совершенно очевидны для специалистов в данной области техники.
Хотя принципы настоящего изобретения остаются теми же, детали конструкции и варианты могут изменяться в широких пределах относительно приведенного выше примера, не выходя за рамки объема изобретения, определенного приложенной формулой изобретения.
Изобретение относится к шарнирно-сочлененному запястью (10) робота, которое содержит первый корпус (12), второй корпус (14) и третий корпус (16). Первый корпус (12) содержит первый и второй конец, при этом первый конец первого корпуса (12) выполнен с возможностью установки на элементе робота, выполненном с возможностью вращения вокруг первой оси (IV). Второй корпус (14) содержит первый и второй конец, причем первый конец второго корпуса (14) установлен на втором конце первого корпуса (12) с возможностью вращения вокруг второй оси (V), наклоненной относительно первой оси (IV). Третий корпус (16) содержит первый и второй конец, при этом первый конец третьего корпуса установлен на втором конце второго корпуса (14) с возможностью вращения вокруг третьей оси (VI), наклоненной относительно второй оси (V). Причем первая и третья оси (IV, VI) ортогональны второй оси (V), при этом по меньшей мере в одном положении запястья робота первая и третья оси выровнены друг с другом. Изобретение направлено на усовершенствование запястья робота путем создания компактной и простой конструкции. 10 з.п. ф-лы, 4 ил. 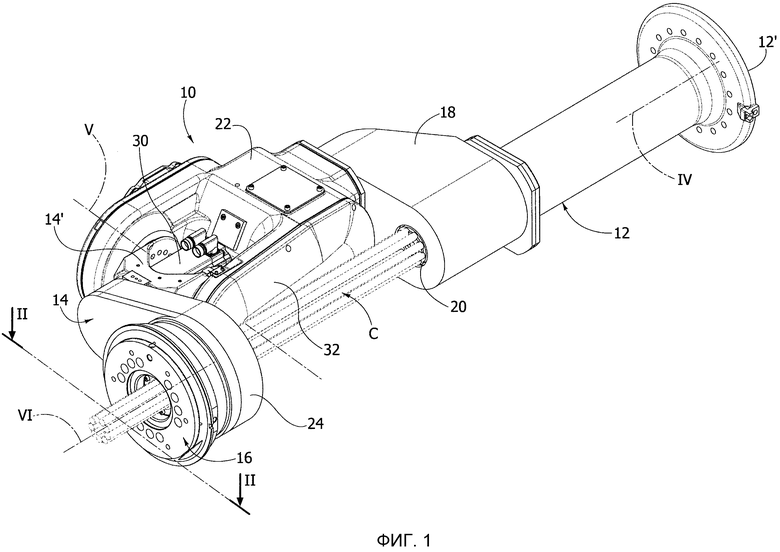
1. Шарнирно-сочлененное запястье (10) робота, содержащее:
первый корпус (12), содержащий первый и второй конец, при этом первый конец первого корпуса (12) выполнен с возможностью установки на элементе робота, выполненном с возможностью вращения вокруг первой оси (IV);
второй корпус (14), содержащий первый и второй конец, причем первый конец второго корпуса (14) установлен на втором конце первого корпуса (12) с возможностью вращения вокруг второй оси (V), наклоненной относительно первой оси (IV);
третий корпус (16), содержащий первый и второй конец, при этом первый конец третьего корпуса установлен на втором конце второго корпуса (14) с возможностью вращения вокруг третьей оси (VI), наклоненной относительно второй оси (V),
причем первая и третья оси (IV, VI) ортогональны второй оси (V), при этом по меньшей мере в одном положении запястья робота первая и третья оси выровнены друг с другом;
причем первый корпус содержит локтевой участок (18), имеющий основание с первым отверстием (20), обращенным ко второму и третьему корпусам и расположенным выровненным с первой осью (IV) в собранном состоянии запястья робота;
при этом локтевой участок имеет смещенный участок (22), смещенный относительно первого отверстия (20), причем второй конец первого корпуса расположен на смещенном участке;
при этом второй корпус содержит консольный участок, соответствующий второму концу второго корпуса, который имеет второе отверстие (26), выровненное с третьей осью (VI), причем в собранном состоянии запястья робота в первое и второе отверстия пропущены кабели и/или трубки для подачи питания и/или управления инструментом, соединенным с третьим корпусом (16) запястья робота,
при этом запястье робота дополнительно содержит средства для приведения во вращение второго и третьего корпусов (14, 16) вокруг второй и третьей оси (V, VI) соответственно, причем средства для приведения во вращение второго и третьего корпусов содержат:
первый электродвигатель (28), установленный на первом корпусе (22),
первое зубчатое средство для передачи вращения выходного вала первого электродвигателя (28) на второй корпус (14),
второй электродвигатель (30), установленный на втором корпусе (14),
второе зубчатое средство для передачи вращения выходного вала второго электродвигателя (30) на третий корпус (16);
отличающееся тем, что первый электродвигатель установлен на смещенном участке (22), при этом на своем конце, противоположном локтевому участку, смещенный участок первого корпуса имеет вильчатый участок (32), соответствующий второму концу первого корпуса, смещенный относительно первого отверстия (20) и на котором установлен второй корпус с возможностью вращения вокруг второй оси (V).
2. Запястье робота по п. 1, в котором второй электродвигатель (30) установлен на первом конце (14′) второго корпуса между рычагами (32′, 32″) вильчатого участка (32).
3. Запястье робота по п. 1 или 2, в котором первый конец (14′) второго корпуса зацепляется с обоими рычагами (32′, 32″) вильчатого участка (32) с возможностью вращения.
4. Запястье робота по п. 2, в котором первый рычаг (32″) вильчатого участка имеет отверстие (62), обращенное к пространству между рычагами вильчатого участка, при этом через первый рычаг (32″) и отверстие (62) первого рычага проходят кабели для подачи питания второго электродвигателя (30).
5. Запястье робота по п. 1, в котором первый электродвигатель (28) установлен в смещенном участке (22) и ориентирован так, что его выходной вал параллелен второй оси (V) и расположен на расстоянии от нее.
6. Запястье робота по п. 5, в котором вал (46) установлен в смещенном участке (22) с возможностью вращения вокруг оси, параллельной второй оси (V), и расположен между выходным валом первого электродвигателя (28) и второй осью (V), при этом вал (46) смещенного участка имеет зубчатое колесо (48), зацепленное с зубчатым колесом (50) выходного вала первого электродвигателя, и зубчатое колесо (52), зацепляющее зубчатое колесо (54), которое установлено в первом рычаге (32′) вильчатого участка с возможностью вращения вокруг второй оси и соединено для вращения с первым концом (14′) второго корпуса.
7. Запястье робота по п. 1, в котором первый электродвигатель (28) установлен в смещенном участке (22) и ориентирован так, что его выходной вал параллелен первой оси (IV) и расположен на расстоянии от нее.
8. Запястье робота по п. 7, в котором первый вал (46) установлен в смещенном участке (22) с возможностью вращения вокруг оси, параллельной второй оси и расположенной на расстоянии от нее,
при этом первый вал (46) имеет зубчатый участок (52), зацепляющий первое зубчатое колесо (54), установленное в первом рычаге (32′) вильчатого участка с возможностью вращения вокруг второй оси и соединено для вращения с первым концом (14′) второго корпуса, причем первый вал (46) имеет второе зубчатое колесо (48), зацепленное с третьим зубчатым колесом (50), закрепленным для вращения на втором валу (56),
при этом второй вал (56) установлен в смещенном участке (22) с возможностью вращения вокруг оси, параллельной второй оси (4) и противоположной ей относительно первого вала, причем второй вал (56) зацепляется, посредством конического зубчатого участка (58) на конце вала напротив третьего зубчатого колеса (50), с соответствующим коническим зубчатым колесом (60), закрепленным для вращения на выходном валу первого электродвигателя (28).
9. Запястье робота по п. 1, в котором консольный участок (24) второго корпуса имеет вал (34), который установлен с возможностью вращения вокруг оси, параллельной третьей оси (VI), и расположен между выходным валом второго электродвигателя (30) и третьей осью (VI), при этом вал (34) консольного участка имеет зубчатое колесо (36), зацепляющее зубчатое колесо (38), закрепленное для вращения на выходном валу второго электродвигателя (30), и другое зубчатое колесо (40), зацепляющее зубчатое колесо (42), установленное в консольном участке (24) с возможностью вращения вокруг третьей оси (VI) и выполненное с возможностью приведения третьего корпуса во вращение.
10. Запястье робота по п. 9, в котором между зубчатым колесом (42) консольного участка (24) и третьим корпусом установлено редукторное средство (44), расположенное соосно с третьей осью, установленное на консольном участке и выполненное с возможностью соединения для вращения зубчатого колеса (42) консольного участка с третьим корпусом.
11. Запястье робота по п. 3, в котором первый рычаг (32″) вильчатого участка имеет отверстие (62), обращенное к пространству между рычагами вильчатого участка, при этом через первый рычаг (32″) и отверстие (62) первого рычага проходят кабели для подачи питания второго электродвигателя (30).
| Кран-манипулятор | 1972 |
|
SU502832A1 |
| EP 1930129 A1, 11.06.2008 | |||
| ЗАПЯСТЬЕ РУКИ РОБОТА С ШАРНИРНЫМИ СОЧЛЕНЕНИЯМИ | 2008 |
|
RU2412045C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

