(54) СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА

| название | год | авторы | номер документа |
|---|---|---|---|
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
| Электрогидравлическое устройство рулевого управления транспортного средства | 1985 |
|
SU1337306A1 |
| Транспортное средство | 1980 |
|
SU935325A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Система рулевого управления транспортного средства | 1985 |
|
SU1710420A1 |
| Гидравлический рулевой привод шарнирно-сочлененного транспортного средства с передними управляемыми колесами | 1978 |
|
SU918157A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2012 |
|
RU2517396C1 |
| Устройство для автоматического управления самоходной сельскохозяйственной машиной | 1985 |
|
SU1291038A1 |
| Гидросистема рулевого управления колесного транспортного средства | 1983 |
|
SU1146227A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
Изобретение относится к транспортному машиностроению, а более конкретно к системам рулевого управления транспортных средств.
Известна система рулевого уйравления транспортного средства, содержащая рулевое колесо, кинематически связанное с заслонкой электрогидравлического усилителя «сопло-заслонка, гидравлически соединенного с напорной гидролинией гидронасоса, гидробаком и полостями гидроцилнндра поворота 1 .
Недостатком известной системы является невозможность осуществления автоматического управления.
Цель изобретения - осуществление возможности автоматического управления транспортнь1м средством.
Указанная цель достигается тем, что система снабжена датчиком рассогласования, усилителем сигнала и электромагнитным преобразователем, вход которого через усилитель сигн-ала связан с упомянутым датчиком рассогласования, причем электромагнитный преобразователь установлен с возможностью взаимодействия с заслонкой
электрогидравлического усилителя, а упомянутая кинематическая связь выполнена подпружиненной и соединена с гидроцилиндром поворота.
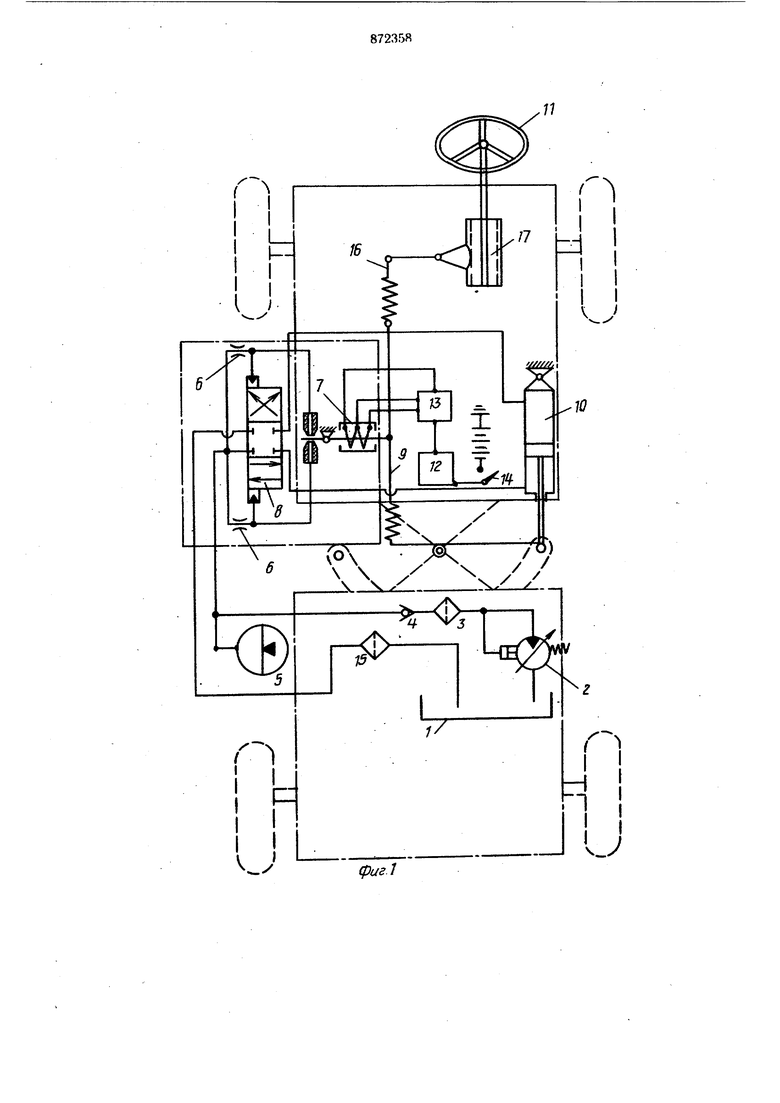
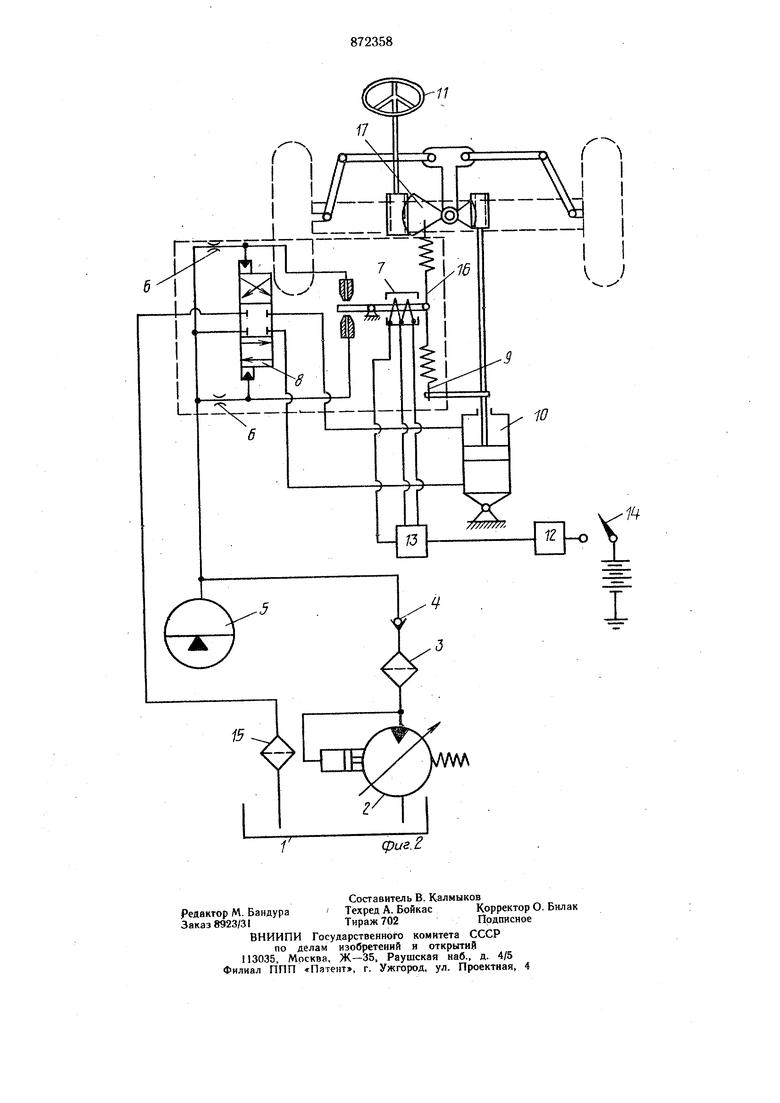
На фиг. 1 дана схема предлагаемой системы применительно к самоходной машине с шарнирно-сочлененной рамой;-на фиг. 2 - то же с управляемыми передними колесами.
Устройство включает гидробак , регулируемый гидронасос 2, фильтр 3 тонкой
to очистки масла, обратный клапан 4, гидропневмоаккумулятор 5, дроссели 6, электромагнитный преобразователь 7, электрогидравлический усилитель 8 «сопло-заслонка, подпружиненную тягу 9 механической обратной связи, гидроцилиндр поворота 10, рулевое колесо 11, датчик рассогласования 12, усилитель сигнала 13, тумблер включения 14, фильтр низкого давления 15, подпружиненную тягу ручного управления 16 и кинематическую передачу 17,
Устройство работает следующим образом. Масло из гидробака 1 через регулируемый гидронасос 2, фильтр 3, обратный клапан 4 поступает на гидропневмоаккумулятор 5 и через дроссели 6 на электрогидравлический усилитель 8 «сопло-заслонка.
Электромагнитный преобразователь 7 и электрогидравлический усилитель 8 установлены таким образом, что заслонка последнего через подпружиненную тягу ручного управления 16 и кинематическую передачу 17 связана с рулевым колесом, а через подпружиненную тягу 9 связана с штоком исполнительного гидроцилиндра поворота самоходной машины.
При отсутствии сигнала рассогласования заслонка находится в нейтральном положении, перепад давления на торцах гидроусилителя 8 одинаков, а выход гидроусилителя 8 разобщен с гидроцилиндром поворота 10, который находится в нейтральном положении. Гидронасос 2 в это время работает в режиме холостого хода, поддерживая заданное давление при малой производительности.
В режиме автоматического вождения при отклонении самоходной машины от заданной линии на датчике рассогласования 12 появляется сигнал, который усиливается в усилителе сигнала 13, поступает на обмотки электромагнитного преобразователя 7, обеспечивающий перемещение заслонки. При этом за счет перепада давлений на торцах золотника, золотник гидроусилителя сме щается и подает расход к гидроцилиндру 10. Следовательно самоходная машина поворачивает в сторону уменьшения сигнала рассогласования. При перемещении гидроцилИндра подпружиненная тяга 9 механической обратной связи воздействует на заслонку, связанную с электромагнитным преобразователем до тех пор, пока усилие, создаваемое последним, не станет равным усилию, создаваемому подпружиненной обратной связью. При снятии электрического сигнала с обмоток электромагнитного преобразователя 7, усилие тяги обратной связи возвращает заслонку, а следовательно, и колеса самоходной машины в нулевое положение.
В ручном управлении тумблер включения 14 выключен и обмотки электромагнитного преобразователя обесточены. В среднем положении рулевого колеса 11 заслонка находится в нейтральном положении за счет соответствующей регулировки тяг 9 и 16. При вращении рулевого колеса 11 усилие через кинематическую передачу 17 и тягу 16 передается на заслонку, вызывая поворот самоходноймашины, причем усилие, передаваемое кинематической передачей ручного управления на заслонку, больше усилия, создаваемого электрическим сигналом, передаваемым на электромагнитный преобразователь, за счет чего обеспечивается приоритет ручного управления и возможность ручной корректировки направления движения самоходной машины в режиме автома: тического вождения.
За счет применения предложенного устройства становится возможным внедрение его в сельскохозяйственное производство, обеспечивающее народнохозяйственный эффект в сумме 19,87 млн. руб. при выпуске тракторов в количестве 13 тыс. штук в год.
20
Формула изобретения
Система рулевого управления транспортного средства, содержащая рулевое колесо,
кинематически связанное с заслонкой электрбгидравлического усилителя типа «сопло-заслонка, гидравлически соединениого с напорной гидролинией гидронасоса, гидробаком и полостями гидроцилиндра поворота, отличающаяся тем, что, с целью автоматизации управления, она снабжена датчиком рассогласования, усилителем сигнала и электромагнитным преобразователем, вход которого через усилитель сигнала связан с упомянутым датчиком рассогласования,
причём электромагнитный преобразователь установлен с возможностью взаимодействия с заслонкой электрогидравлического усилителя, а упомянутая кинематическая связь выполнена подпружиненной и соединена с гидроцилиндром поворота.
Источники информации, принятые во внимание при экспертизе 1. Патент США № 3412822, кл. 180-79.2, 1968 (прототип).
/
Г
-
I
-Х
Л
X
1Q
и
п
J
fpae.l
