Область техники
Настоящее изобретение относится к системе определения уровня, использующей электромагнитные волны для определения расстояния до поверхности продукта, содержащегося в резервуаре.
Уровень техники
Эксплуатационные устройства, такие как радарные уровнемеры, удобным образом используются для измерения уровня продуктов, таких как технологические текучие среды, гранулированные смеси и другие материалы. В примере выполнения такой радарный уровнемер может включать в себя микроволновый блок для передачи микроволн к поверхности и приема микроволн, отражаемых поверхностью, процессорную схему, предназначенную для связи с микроволновым блоком и определения уровня на основе соотношения между передаваемыми и принимаемыми микроволнами.
В последние годы растет спрос на беспроводные измерительные устройства или системы с ограничением их энергопотребления, такие как так называемые системы замкнутого питания с замкнутым контуром тока в 4-20 мА. Беспроводные измерительные устройства могут снабжаться энергией, например, от аккумуляторных батарей или солнечной энергией. Для таких устройств желательно улучшение энергетической эффективности, например, для повышения срока службы батарей. Соответственно, существует потребность в новых измерительных устройствах, имеющих повышенную энергетическую эффективность по сравнению с обычными радарными уровнемерами.
Один подход для снижения энергопотребления заключается в уменьшении времени измерения, то есть в том, чтобы выполнять измерения быстрее. Однако более короткое время измерения в сочетании с непрерывной программой измерений, обычно используемой в радарных уровнемерах, приведет к получению большого числа результатов измерений. Изобилие результатов не обязательно приводит к улучшению как точности, так и надежности измерений. Кроме того, повышается трудность обработки и хранения возросшего объема генерируемых данных, особенно с учетом ограничения энергопотребления. Поэтому периодическое действие радарных систем определения уровня, когда система производит измерения только с заданными интервалами по времени, является привлекательной альтернативой в аспекте повышения энергетической эффективности.
Однако с периодическими измерениями также связаны проблемы. Так, например, система может быть выполнена с возможностью инициализации и выполнения измерений с регулярными интервалами, и если характеристики подлежащей измерению поверхности изменяются во времени, измерение может давать ненадежный результат. К тому же следующее измерение может быть также ненадежным, и это может приводить к длительным периодам между надежными измерениями и нестабильному считыванию уровня.
Соответственно, существует потребность в усовершенствованной системе определения уровня и способе для периодического измерения уровня наполнения продукта в резервуаре.
Раскрытие изобретения
С учетом указанного выше основной задачей настоящего изобретения является создание усовершенствованного способа и устройства для надежного определения уровня наполнения содержащегося в резервуаре продукта, обеспечивающих повышенную надежность и энергетическую эффективность. В частности, задачей настоящего изобретения является обеспечение меньшего активного времени работы системы периодического определения уровня, по меньшей мере, для некоторых условий измерений.
Согласно первому аспекту изобретения решение этой и других задач достигается посредством способа определения уровня наполнения продукта, содержащегося в резервуаре, включающего в себя шаги: а) передают электромагнитный зондирующий сигнал к целевой области поверхности продукта; b) принимают отраженный зондирующий сигнал, являющийся отражением электромагнитного зондирующего сигнала от данной поверхности; с) определяют величину параметра, являющегося показателем амплитуды отраженного зондирующего сигнала; если величина параметра, являющегося показателем амплитуды, больше заранее заданной пороговой величины; d) передают электромагнитный измерительный сигнал к этой целевой области поверхности продукта; е) принимают обратный сигнал, являющийся отражением электромагнитного измерительного сигнала на поверхности; и f) определяют уровень наполнения на основе соотношения по времени между электромагнитным измерительным сигналом и обратным сигналом.
Изобретение основывается на осознании того, что предпочтительно перед тем, как выполнять измерительный цикл, установить, что условия измерения таковы, что измерения могут быть успешными. В измерительной системе, использующей передачу электромагнитного сигнала к поверхности и прием отраженного сигнала в результате отражения от поверхности продукта, достаточная часть передаваемого сигнала должна отражаться и приниматься приемником, чтобы обеспечивать возможность анализа отраженного сигнала и тем самым возможность установления расстояния до поверхности.
При условиях измерений, когда поверхность продукта ведет себя как изменяющийся по времени отражатель, такой как турбулентная поверхность, интенсивность отраженного сигнала может изменяться во времени в соответствии с изменением поверхности. При относительно медленном измерении, когда время измерения значительно дольше периодичности изменения поверхности во времени, отраженный сигнал будет усредненным по времени сигналом, представляющим усредненную по времени поверхность. В данном контексте периодичность поверхности относится к изменению уровня поверхности во времени в определенной точке поверхности. Поэтому в тех случаях, когда измерение существенно медленнее периодического изменения поверхности во времени, реальное время выполнения измерения по отношению к периодичности поверхности не влияет на результат измерения.
Противоположным образом обстоит дело в системах быстрого измерения, когда время измерения может быть равно или меньше периодичности изменения поверхности во времени. Если измерительный цикл инициируется в то время, когда отраженный сигнал имеет относительно низкую амплитуду, измерение может не состояться или результат измерения может быть ненадежным, что приведет к напрасному потреблению энергии, так как измерение придется повторять до тех пор, пока оно не будет выполнено успешно. Однако путем передачи первоначального сигнала, а именно зондирующего сигнала, который может быть значительно короче измерительного сигнала, для установления того, что отражается достаточная часть сигнала, может быть определено, благоприятны ли условия измерения. Благодаря этому становится более вероятным, что измерение инициируется и выполняется только при условиях, которые обеспечивают вероятность успешного измерения. Это приводит к повышению энергетической эффективности и снижению числа неудачных измерений.
Дополнительно в системе определения уровня, в которой время измерения значительно короче периода изменения поверхности, время от определения того, что амплитуда отраженного зондирующего сигнала больше заранее заданной пороговой величины, до завершения измерения достаточно для того, чтобы считать поверхность квазистатической в ходе измерения.
Вследствие этого система определения уровня в соответствии с примерами осуществления изобретения особенно полезна при измерении периодически изменяющейся во времени поверхности, когда период изменения поверхности, по меньшей мере, равен или дольше длительности измерения. Таким образом, активное время системы, определяемое как время от передачи первого зондирующего сигнала до завершения измерения, соотносится с периодичностью изменения поверхности во времени. В частности, при допущении, что условия поверхности таковы, что измерение возможно в некоторой точке в течение периода изменяющейся во времени поверхности, активное время короче или равно периоду изменения поверхности. Типичный период турбулентной поверхности может иметь порядок 10 мс.
Соответственно, предпочтительно использовать способ по изобретению в системе для периодических измерений, в частности для измерения изменяющейся во времени поверхности, с целью снижения энергопотребления.
В данном контексте изменяющаяся во времени поверхность может быть, например, турбулентной поверхностью, где источником турбулентности может быть кипение, перемешивание или другие воздействия, вызывающие движение продукта в резервуаре.
В некоторых обстоятельствах поверхность продукта может изменяться беспорядочно. Однако даже в случае беспорядочно изменяющихся поверхностей использование способа определения уровня в соответствии с примерами осуществления изобретения имеет преимущества, так как более вероятно выполнение успешного измерения, если определено, что условия в начале измерения таковы, что отражается достаточная часть переданного сигнала.
В данном контексте термин зондирующий сигнал следует понимать как любой сигнал, используемый для определения того, благоприятны ли условия для измерения. Зондирующий сигнал может быть, например, единичным импульсом, имеющим заранее заданные форму и амплитуду.
Измерительный сигнал может быть электромагнитным сигналом любого типа, таким как непрерывный периодический сигнал, серия импульсов, дискретные импульсы, или сигналом любого другого формата, известным специалисту в данной области. Кроме того, измерение может основываться на времяпролетном принципе, когда время может быть получено непосредственно или косвенно, например, из амплитуды, фазы, фазового сдвига или частотного контента отраженного сигнала.
Величина параметра, являющегося показателем амплитуды отраженного зондирующего сигнала, может быть действительной амплитудой отраженного зондирующего сигнала. Посредством сравнения амплитуды отраженного зондирующего сигнала с заранее заданной пороговой величиной может быть определено, является ли амплитуда отраженного сигнала такой, что измерение может быть проведено успешно. Однако величина параметра, являющегося показателем амплитуды зондирующего сигнала, может быть любой характеристикой, имеющей отношение к амплитуде сигнала, такой как абсолютная или относительная амплитуда, энергетический контент, фаза, форма или любой другой параметр, который может прямо или косвенно относиться к амплитуде сигнала.
Согласно примеру осуществления изобретения в том случае, если величина параметра, определенная на шаге с), является показателем амплитуды меньше или равной заранее заданной пороговой величине, способ возвращается к шагу а). При этом зондирующий сигнал может передаваться повторно до тех пор, пока не будет принят отраженный зондирующий сигнал, указывающий, что условия измерения благоприятны.
Альтернативно во избежание неопределенной передачи зондирующих сигналов, как это может быть при условиях, когда характеристики поверхности таковы, что не отражается достаточная часть сигнала, может быть предусмотрен лимит числа зондирующих сигналов или заранее заданный лимит времени, после которых передача зондирующих сигналов прерывается, и система возвращается к режиму ожидания.
В примере осуществления время, требуемое для выполнения шагов от d) до f), не превышает 100 мкс. Во многих обстоятельствах предпочтительно, чтобы измерение занимало как можно меньше времени. В аспекте энергетической эффективности желательно снизить время измерения и тем самым активное время системы. Кроме того, быстрое измерение повышает вероятность того, что все измерение будет проведено при тех же условиях поверхности, что и при отражении зондирующего сигнала.
Согласно примеру осуществления изобретения измерительный сигнал образован в виде серии индивидуальных несущих импульсов, каждый из которых имеет длительность больше 1 мкс.
В этом примере осуществления изобретения шаг f) может содержать шаги: f1) определяют действительные характеристики фазы каждого индивидуального принятого импульса по отношению к каждому соответствующему индивидуальному переданному импульсу; f2) на основе первоначально оцененного расстояния определяют ожидаемые характеристики фазы каждого индивидуального принятого импульса по отношению к каждому соответствующему индивидуальному переданному импульсу; и f3) соотносят действительные характеристики фазы с ожидаемыми характеристиками фазы для получения уточненной оценки расстояния.
Кроме того, первоначально оцененное расстояние может быть получено посредством первоначального измерения расстояния.
Согласно второму аспекту изобретения создана система определения уровня для определения уровня наполнения продукта, содержащегося в резервуаре, выполненная с возможностью работы в режиме зондирования и в режиме измерения и содержащая радарный модуль для генерирования, передачи и приема электромагнитных сигналов; устройство распространения, соединенное с приемопередатчиком и предназначенное для распространения переданного электромагнитного сигнала к продукту внутри резервуара и приема отраженного электромагнитного сигнала в результате отражения переданного электромагнитного сигнала от поверхности продукта, содержащегося в резервуаре; и процессорную схему, соединенную с приемопередатчиком, причем процессорная схема содержит схему управления функционированием; схему сравнения и схему определения уровня наполнения, при этом, когда система определения уровня работает в режиме зондирования, схема управления функционированием управляет радарным модулем для передачи зондирующего сигнала; схема сравнения сравнивает величину параметра, являющегося показателем амплитуды принятого отраженного зондирующего сигнала, с заранее заданной величиной параметра, являющегося показателем пороговой величины амплитуды; и схема управления функционированием управляет системой определения уровня для ее перехода в режим измерения, если амплитуда больше пороговой величины амплитуды; и когда радарная система определения уровня работает в режиме измерения, схема управления функционированием управляет радарным модулем для передачи электромагнитного измерительного сигнала и схема определения уровня наполнения определяет уровень наполнения на основе соотношения по времени между переданным электромагнитным измерительным сигналом и принятым его отражением.
Устройство распространения может быть любым устройством, способным распространять электромагнитные сигналы, включая зонды линий передачи, волноводы и различные типы передающих антенн, такие как рупорные антенны, антенные решетки и т.д.
Следует отметить, что процессорная схема может быть выполнена в виде одного или нескольких микропроцессоров, включенных в систему определения уровня. Кроме того, схема управления функционированием, схема сравнения и схема определения уровня наполнения могут быть выполнены в виде индивидуальных микропроцессоров или в виде интегрированных функций в одном микропроцессоре или печатной плате.
Согласно примеру осуществления изобретения, когда система определения уровня работает в режиме зондирования, схема управления функционированием управляет системой определения уровня, чтобы она оставалась в режиме зондирования, если амплитуда меньше или равна заранее заданной пороговой величине.
В примере осуществления изобретения система определения уровня может дополнительно содержать дискретизатор реального времени, причем когда система определения уровня работает в режиме измерения, дискретизатор реального времени дискретизирует принимаемое отражение передаваемого электромагнитного измерительного сигнала в реальном времени и предоставляет дискретизированный отраженный сигнал схеме определения уровня наполнения; и схема определения уровня наполнения определяет уровень наполнения на основе соотношения по времени между переданным электромагнитным измерительным сигналом и дискретизированным отраженным сигналом.
Другие эффекты и особенности второго аспекта изобретения, по существу, аналогичны описанным в связи с первым аспектом изобретения.
Краткий перечень чертежей
Далее эти и другие аспекты изобретения будут описаны боле подробно со ссылками на прилагаемые чертежи, на которых показан пример осуществления изобретения. На чертежах:
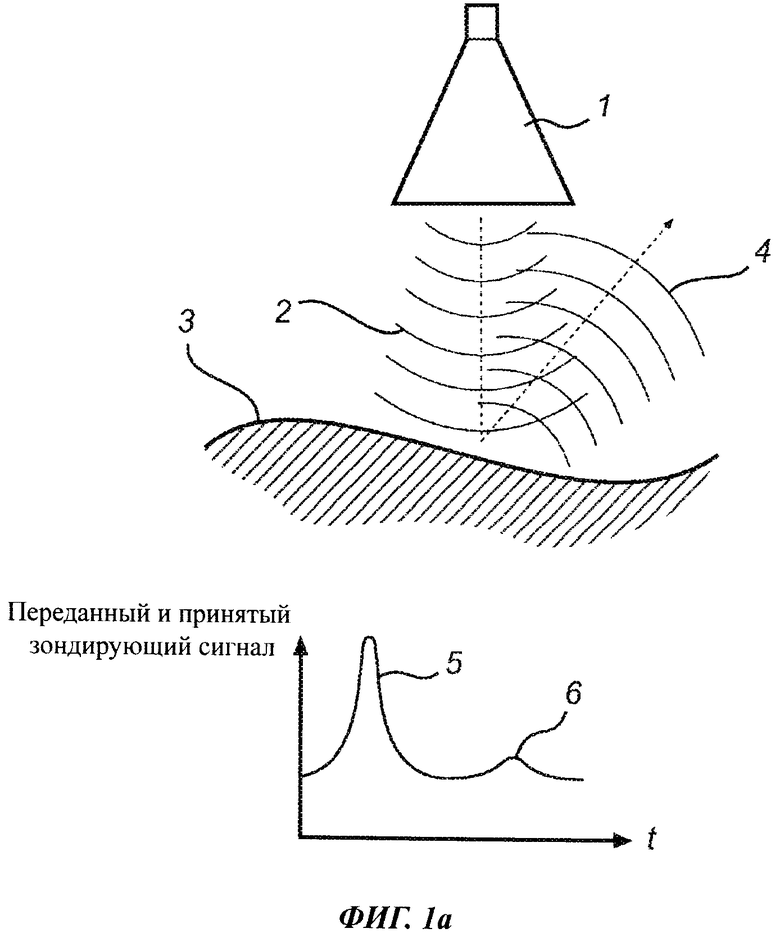
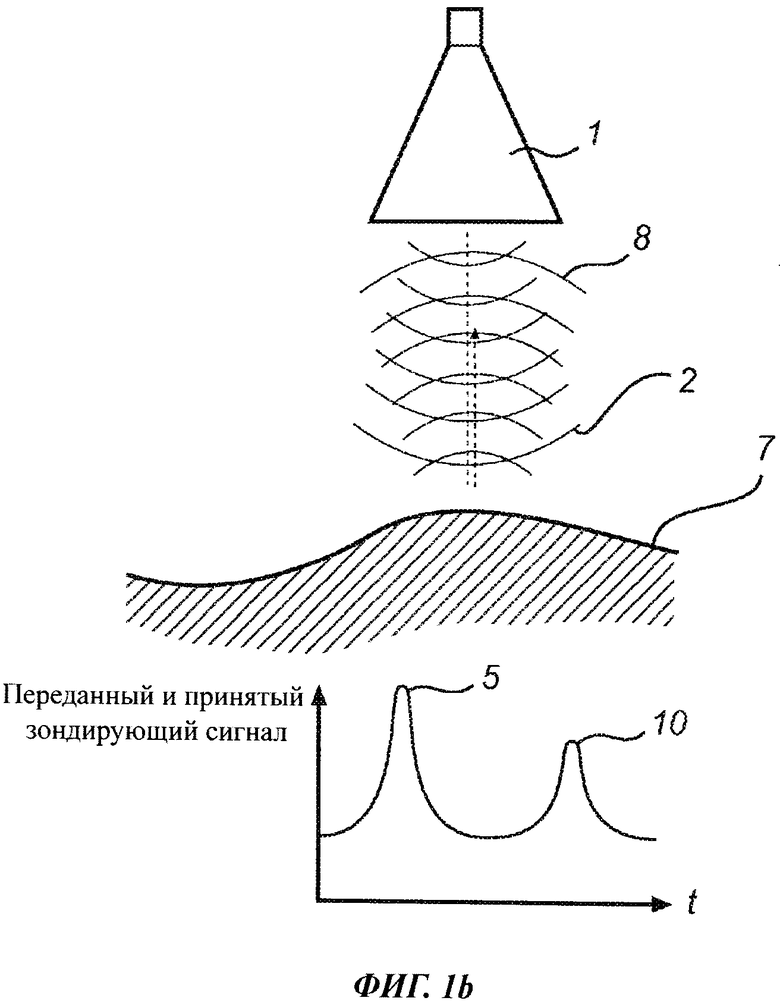
фиг. 1 схематично изображает передаваемые электромагнитные сигналы, отражаемые от изменяющейся по времени поверхности;
фиг. 2 схематично изображает систему радарного определения уровня в соответствии с примером осуществления изобретения;
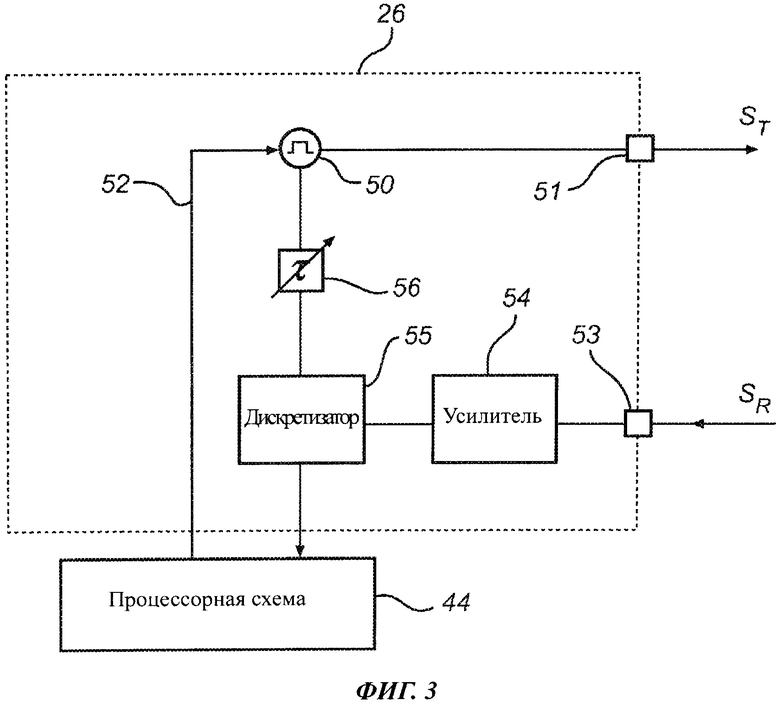
фиг. 3 изображает блок-схему радарного модуля по фиг. 2;
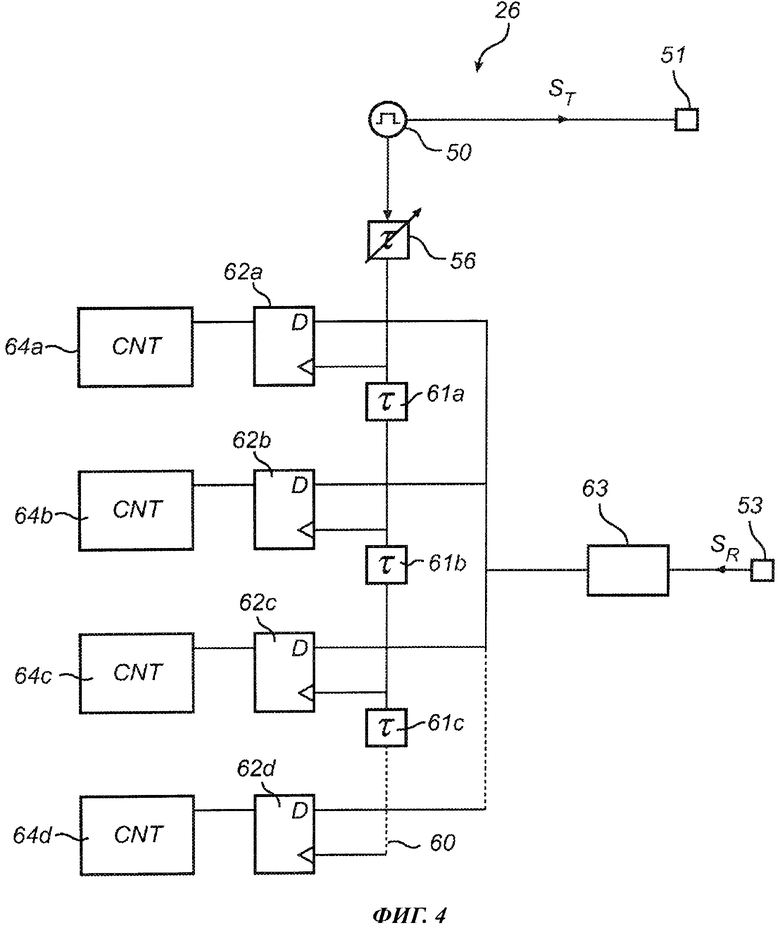
фиг. 4 иллюстрирует пример выполнения частей передатчика и приемника радарного модуля по фиг. 3; и
фиг. 5 изображает функциональную блок-схему способа в соответствии с примером осуществления изобретения.
Осуществление изобретения
В данном подробном описании различные примеры осуществления способа и системы в соответствии с изобретением поясняются применительно к радарной системе определения уровня, содержащей антенну свободной передачи сигнала, такую как рупорная антенна, для определения уровня наполнения продукта, содержащегося в резервуаре. Следует отметить, что это никак не ограничивает объема защиты изобретения, которое равным образом применимо к другим устройствам передачи сигнала, включающим в себя другие антенны свободной передачи, такие как стержневая антенна, патч-антенна, неподвижная или подвижная параболическая антенна или коническая антенна, а также волноводы, такие как успокоительная трубка, трансмиссионная линия или зонд, такой как однопроводной зонд (в том числе так называемый зонд Губо), двухпроводной зонд или коаксиальный зонд.
На фиг. 1а схематично показана передающая и приемная антенна 1 в системе определения уровня, передающая электромагнитный сигнал 2 к поверхности 3 продукта. Когда сигнал 2 достигает поверхности 3, по меньшей мере, часть возвращается в виде отраженного сигнала 4. На фиг. 1а показан случай, когда поверхность имеет такие свойства, что отраженный сигнал направлен не прямо обратно к приемной антенне 1. Вследствие этого амплитуда доходящего до антенны отраженного сигнала меньше по сравнению с переданным сигналом. Это также проиллюстрировано на диаграмме на фиг. 1а посредством импульса 5, представляющего переданный сигнал 2, и отраженного импульса 6, представляющего часть отраженного сигнала 4, принимаемого антенной. На фиг. 1b схематично показан случай, когда свойства поверхности 7 таковы, что переданный сигнал 2 отражается в основном перпендикулярно поверхности 7, так что большая часть отраженного сигнала 8 достигает приемной антенны 1. Как показано на диаграмме на фиг. 1b, амплитуда отраженного сигнала 10, дошедшего до антенны, значительно больше амплитуды отраженного сигнала 6 по фиг. 1а. Поэтому амплитуда принимаемого сигнала 10 по фиг. 1 может рассматриваться как указание на более благоприятные условия измерения в отношении того, что большая часть переданного сигнала 5 отражается и принимается приемной антенной 1 по сравнению с принимаемым сигналом 6 по фиг. 1а. Следует отметить, что показанные на фиг. 1 сигналы и импульсы схематично представлены только в качестве примера для иллюстрации того, каким образом изменяющаяся по времени поверхность может влиять на отражение сигнала.
На фиг. 2 схематично показана радарная система 20 в соответствии с примером осуществления изобретения для определения уровня наполнения резервуара 24 находящимся в нем продуктом 22. Радарная система 20 определения уровня содержит радарный модуль 26, устройство 28 распространения и процессорную схему 30, содержащую схему 30 управления функционированием, схему 32 сравнения, схему 34 определения уровня и радарный модуль 26. Хотя здесь они показаны отдельными блоками, процессорная схема 44 может быть выполнена на одной плате или интегрирована в одном микропроцессоре.
Посредством анализа измерительного сигнала ST, распространяемого антенной 28 к целевому участку 36 поверхности 38 продукта 22, и отраженного сигнала SR, идущего назад от поверхности 38, блок 34 определения уровня может определять расстояние между исходной координатой и поверхностью 38 продукта 22, из которого может быть выведен уровень наполнения. Следует заметить, что хотя здесь идет речь о резервуаре 24, содержащем один продукт 22, таким же образом может измеряться расстояние до любой границы раздела материалов в резервуаре 24. Уровень наполнения передается к удаленному месту через антенну 40 связи.
При работе радарный модуль 26 генерирует электромагнитный измерительный сигнал ST и принимает отраженный сигнал SR. Радарный модуль 26, который будет подробно описан дальше, обеспечивает для процессорной схемы 44 данные, из которых может быть определен уровень наполнения.
Процессорная схема 44 определяет уровень наполнения и/или другие параметры процесса и отправляет эту информацию к удаленному месту через блок 34 беспроводной связи, который предпочтительно может удовлетворять протоколу HART беспроводной связи (стандарт IEC 62591).
Процессорная схема 44 может также принимать различные команды через блок 34 беспроводной связи и может управлять радарным модулем в ответ на эти команды. В частности, процессорная схема 44 может получать сигнал активизации через блок 34 беспроводной связи, выполнять операцию измерения, сообщать об определенном уровне наполнения и затем возвращаться в режим ожидания. Этот вид периодического действия является важным фактором достижения долговременного автономного действия без вмешательства пользователя. Радарный модуль 26, процессорная схема 44 и блок 34 беспроводной связи обеспечиваются мощностью от локального источника мощности, такого как аккумуляторная батарея 42.
На фиг. 3 показана более подробная блок-схема радарного модуля 26 по фиг. 2. Радарный модуль 26 содержит передающую часть и приемную часть, интегрированные в одном чипе. Выполнение на единственном чипе может достигаться путем объединения на одном кремниевом кристалле или на множестве кремниевых кристаллов, соединенных в один пригодный для монтажа компонент.
Передающая часть включает в себя импульсный генератор 50, предназначенный для генерирования и передачи импульсов, имеющих желаемую частоту и форму импульса. Импульсный генератор 50 соединен с устройством 28 распространения сигналов через выходной терминал 51. Частота повторения импульсов импульсного генератора 50 управляется внешним тактовым сигналом 52, например, получаемым от процессорной схемы 44. В качестве примера средняя частота импульсов может быть равной 3,4 ГГц, а тактовая частота может составлять от 1 до 100 МГц, например быть равной 90 МГц. Длительность каждого импульса имеет порядок наносекунд.
Приемная часть включает в себя входной терминал 53, соединенный с усилителем 54, предназначенным для усиления сигнала, принимаемого на входном терминале 53.
Далее, приемная часть включает в себя дискретизатор 55 реального времени, предназначенный для дискретизации принимаемого сигнала в реальном времени. В контексте радарного определения уровня дискретизация в реальном времени указывает разрешение порядка пикосекунд. Дискретизатор 55 соединен с импульсным генератором 50 через блок 56 выдержки времени и предназначен для того, чтобы начинать дискретизацию принимаемого сигнала с заранее заданной выдержкой времени после времени излучения измерительного импульса импульсным генератором 50.
Согласно одному примеру осуществления дискретизатор 55 может работать по принципу «линейной пороговой дискретизации», описанному в работе "Thresholded samplers for UWB impulse radar" («Пороговые дискретизаторы для сверхширокополосного импульсного радара») авторов Hjortland et al., которая включена в данную заявку в качестве ссылки. Согласно этому подходу принимаемый сигнал сравнивается с пороговой величиной, и несинхронизированный выход подвергается дискретизации посредством системы инверторных каскадов. Далее будет описан пример конфигурации передающей и приемной частей радарного модуля 26 для линейной пороговой дискретизации со ссылкой на фиг.4, на которой дискретизатор 55 реального времени по фиг.3 показан более подробно.
Как видно на фиг. 4, дискретизатор 55 реального времени содержит линию 60 выдержки времени дискретизации, образованную множеством последовательно соединенных элементов 61а-61с выдержки времени дискретизации. Между элементами 61а-61с выдержки времени дискретизации линия 60 выдержки времени дискретизации соединена с последовательным рядом триггеров 62a-62d задержки. Триггеры 62a-62d задержки также подсоединены на входе задержки к входному терминалу 53 через пороговую схему 63. Выход каждого триггера 62a-62d задержки соединен с соответствующим счетчиком 64a-64d.
За счет задержки прохождения вдоль линии 60 выдержки времени дискретизации триггеры 62a-62d задержки будут замыкаться в различное время задержанным измерительным импульсом, который исходит от импульсного генератора и идет вдоль линии 60 выдержки времени дискретизации. Соответственно, сигнал на входах задержки триггеров 62a-62d задержки будет дискретизироваться в различное время со временем между последовательными отборами, - периодом дискретизации, - соответствующим задержке прохождения сигнала элементами 61а-61с выдержки времени.
В линейной пороговой дискретизации входной сигнал (в данном случае отраженный сигнал SR) сравнивается с пороговой величиной в пороговой схеме 63. Если/когда входной сигнал SR больше пороговой величины, выход от пороговой схемы 63 «высок», а когда входной сигнал SR меньше пороговой величины, выход от пороговой схемы 63 «низок» Если выход «высок», при отборе на триггерах 62a-62d задержки на счетчик поступает «1» от триггеров 62a-62d задержки. Другими словами, обеспечивается двоичная последовательность.
Дискретизация повторяется несколько раз с постепенным увеличением (линейным перемещением) порога и получением множества двоичных последовательностей. Эти двоичные последовательности комбинируются для получения числового дискретного сигнала, имеющего разрешение (в единицах амплитуды сигнала), которое соответствует числу повторений дискретизации плюс одна.
Линия 60 выдержки времени дискретизации может содержать, например, 128 элементов задержки, каждый из которых образован одним инверторным каскадом (или несколькими инверторными каскадами). В этом случае будет образована двоичная последовательность из 128 бит. Если проведена одна дискретизация, разрешение (в единицах амплитуды сигнала) будет равно 2 (высокое или низкое). Если проведено 511 дискретизаций, разрешение будет равно 512 или 29. Дополнительно дискретизатор может иметь опцию накопления повторных последовательностей дискретизации и вывода среднего результата для снижения влияния шума.
Эффективная частота дискретизации (разрешение в единицах времени) будет обратно пропорциональна выдержке времени единичного элемента выдержки времени дискретизации. В качестве примера, если выдержка времени прохождения одного из элементов выдержки времени дискретизации (одного инверторного каскада) составляет около 30 пс, частота выборки будет близка к 35 Гвыб./с. Электромагнитные волны распространяются со скоростью 0,3 мм/пс в вакууме, следовательно, пространственное разрешение дискретизатора составляет около 9 мм при измерении с односторонней задержкой по времени или 4,5 мм при измерении с двусторонней задержкой по времени.
Альтернативный метод измерения на основе импульсной волны с частотной модуляцией описан в заявке 12/981995, полностью включенной в данное описание в качестве ссылки.
Далее будет описан пример осуществления способа по изобретению со ссылкой на схематичную иллюстрацию радарной системы определения уровня в резервуаре по фиг. 2 и на функциональную блок-схему алгоритма, представляющую общие шаги способа.
На первом шаге 501 на фиг. 5 зондирующий сигнал передают к целевой области 36 поверхности 38 продукта 22. Зондирующий сигнал может быть единичным импульсом заранее заданной формы и амплитуды. Затем, на шаге 502 зондирующий сигнал отражается на поверхности 38, и принимают часть отраженного сигнала, распространяющегося к приемной антенне. На шаге 503 определяют величину параметра, являющуюся показателем амплитуды принимаемого сигнала. Так, например, величина параметра может быть действительной амплитудой импульса. На шаге 504 выполняют сравнение амплитуды или эквивалентной характеристики, такой как энергия, форма или фаза принимаемого сигнала, с заранее заданной пороговой величиной. Если амплитуда принятого импульса выше пороговой величины, определяют, что условия поверхности таковы, что достаточная часть переданного импульса отражается для того, чтобы успешно выполнить измерение, определяющее положение поверхности и, следовательно, уровень наполнения резервуара. С другой стороны, если амплитуда отраженного сигнала равна или ниже пороговой величины, способ возвращается к шагу 501, и передается новый зондирующий сигнал. За счет этого измерение может быть отсрочено до тех пор, пока характеристики поверхности не станут такими, что измерение может быть проведено успешно. Однако если последовательные зондирующие сигналы не обеспечивают отраженного сигнала, удовлетворяющего пороговым требованиям, передача зондирующих сигналов может быть прервана после заранее заданного числа передаваемых сигналов или после заранее заданного лимита времени. Альтернативно измерение может быть проведено после некоторого числа переданных зондирующих сигналов или после заданного периода времени, даже если пороговые условия не соблюдены.
На шаге 505 измерительный сигнал передают к упомянутой целевой области 36 поверхности продукта. Желательно, чтобы измерительный сигнал отражался от той же целевой области, где отражался зондирующий сигнал, чтобы характеристики поверхности были сравнимыми для обоих сигналов. Это возможно с учетом того, что время измерения и время между приемом зондирующего сигнала и инициализацией измерения коротко по отношению к изменению поверхности. На шаге 506 получают отраженный измерительный сигнал и в заключение на шаге 507 уровень наполнения определяют на основе расстояния до поверхности.
Для специалиста в данной области понятно, что изобретение не ограничивается описанными предпочтительными примерами осуществления. В пределах объема защиты, определенного пунктами формулы изобретения, возможно множество модификаций и вариаций. Так, например, зондирующий сигнал может обеспечиваться различными путями в пределах общей концепции изобретения. Кроме того, для определения уровня наполнения могут использоваться любые подходящие программы определения, как существующие в настоящее время, так и будущие. Такая программа предпочтительно должна быть относительно быстрой и должна иметь высокую энергетическую эффективность.

Изобретение относится к способу и устройству определения уровня, использующему электромагнитные волны для определения расстояния до поверхности продукта, содержащегося в резервуаре. Способ определения уровня наполнения продукта, содержащегося в резервуаре, включает в себя шаги: а) передают электромагнитный зондирующий сигнал к целевой области поверхности продукта; b) принимают отраженный зондирующий сигнал, являющийся отражением электромагнитного зондирующего сигнала от данной поверхности; с) определяют величину параметра, являющегося показателем амплитуды отраженного зондирующего сигнала; если величина параметра, являющегося показателем амплитуды, больше заранее заданной пороговой величины; d) передают электромагнитный измерительный сигнал к этой целевой области поверхности продукта; е) принимают обратный сигнал, являющийся отражением электромагнитного измерительного сигнала на поверхности; и f) определяют уровень наполнения на основе соотношения по времени между электромагнитным измерительным сигналом и обратным сигналом. Техническим результатом является повышение надежности и энергетической эффективности, в частности, за счет обеспечения меньшего активного времени работы устройства. 2 н. и 7 з.п. ф-лы, 5 ил.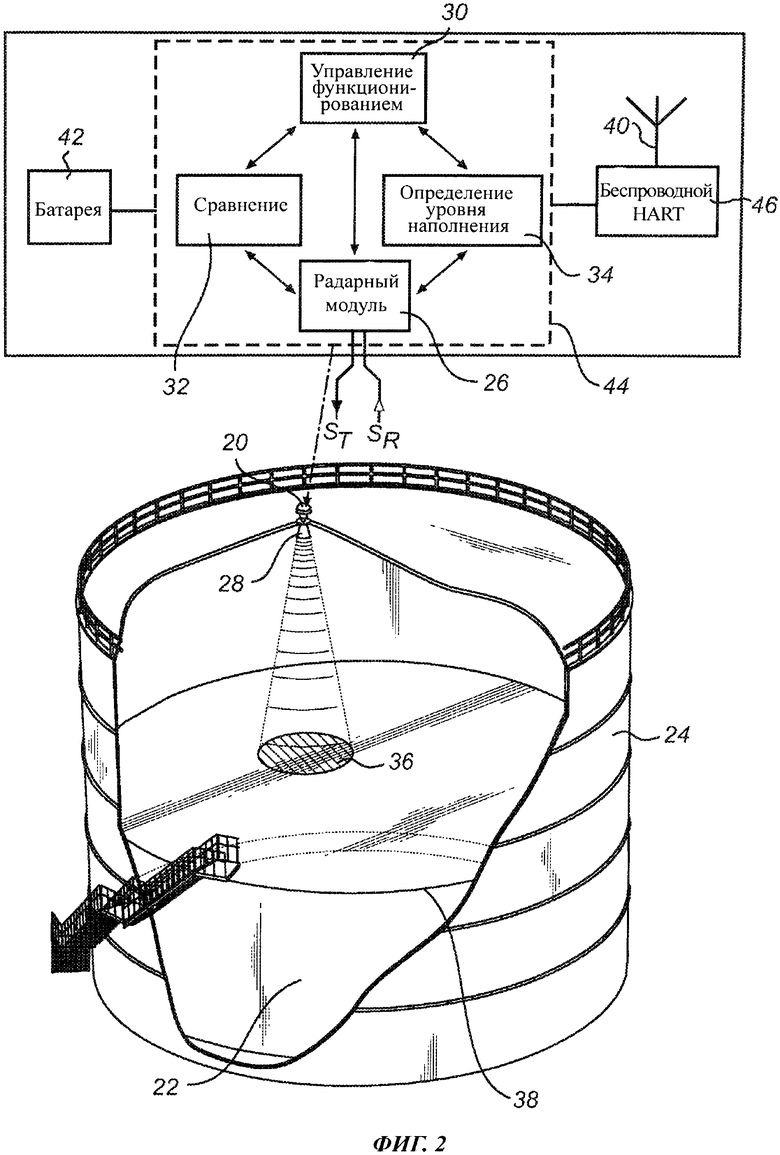
1. Способ определения уровня наполнения продукта (22), содержащегося в резервуаре (24), включающий в себя шаги:
a) передают электромагнитный зондирующий сигнал к целевой области (36) поверхности (38) продукта;
b) принимают отраженный зондирующий сигнал, являющийся отражением электромагнитного зондирующего сигнала от данной поверхности;
c) определяют величину параметра, являющегося показателем амплитуды отраженного зондирующего сигнала;
если величина параметра, являющегося показателем амплитуды, больше заранее заданной пороговой величины,
d) передают электромагнитный измерительный сигнал к этой целевой области (36) поверхности (38) продукта;
e) принимают обратный сигнал, являющийся отражением электромагнитного измерительного сигнала на поверхности, и
f) определяют уровень наполнения на основе соотношения по времени между электромагнитным измерительным сигналом и обратным сигналом.
2. Способ по п. 1, отличающийся тем, что если величина параметра, определенная на шаге с), является показателем амплитуды меньше или равной заранее заданной пороговой величине, то возвращаются к шагу а).
3. Способ по п. 1, отличающийся тем, что время, требуемое для выполнения шагов от d) до f), не превышает 100 мкс.
4. Способ по любому из пп. 1-3, отличающийся тем, что измерительный сигнал образован в виде серии индивидуальных несущих импульсов, каждый из которых имеет длительность больше 1 мкс.
5. Способ по п. 4, отличающийся тем, что шаг f) содержит шаги:
f1) определяют действительные характеристики фазы каждого индивидуального принятого импульса по отношению к каждому соответствующему индивидуальному переданному импульсу;
f2) на основе первоначально оцененного расстояния определяют ожидаемые характеристики фазы каждого индивидуального принятого импульса по отношению к каждому соответствующему индивидуальному переданному импульсу; и
f3) соотносят действительные характеристики фазы с ожидаемыми характеристиками фазы для получения уточненной оценки расстояния.
6. Способ по п. 5, отличающийся тем, что первоначально оцененное расстояние получают посредством первоначального измерения расстояния.
7. Система (20) определения уровня для определения уровня наполнения продукта (22), содержащегося в резервуаре (24), выполненная с возможностью работы в режиме зондирования и в режиме измерения и содержащая:
радарный модуль (26) для генерирования, передачи и приема электромагнитных сигналов;
устройство (28) распространения, соединенное с приемопередатчиком и предназначенное для распространения переданного электромагнитного сигнала к продукту внутри резервуара и приема отраженного электромагнитного сигнала в результате отражения переданного электромагнитного сигнала от поверхности продукта, содержащегося в резервуаре; и
процессорную схему (44), соединенную с приемопередатчиком, причем процессорная схема содержит:
схему (30) управления функционированием;
схему (32) сравнения и
схему (34) определения уровня наполнения,
при этом,
когда система определения уровня работает в режиме зондирования,
схема (30) управления функционированием управляет радарным модулем (26) для передачи зондирующего сигнала;
схема (32) сравнения сравнивает величину параметра, являющегося показателем амплитуды принятого отраженного зондирующего сигнала, с заранее заданной величиной параметра, являющегося показателем пороговой величины амплитуды, и
схема (30) управления функционированием управляет системой определения уровня для ее перехода в режим измерения, если указанная амплитуда больше пороговой величины амплитуды; и
когда радарная система определения уровня работает в режиме измерения,
схема (30) управления функционированием управляет радарным модулем для передачи электромагнитного измерительного сигнала и
схема (34) определения уровня наполнения определяет уровень наполнения на основе соотношения по времени между переданным электромагнитным измерительным сигналом и принятым его отражением.
8. Система определения уровня по п. 7, отличающаяся тем, что, когда система определения уровня работает в режиме зондирования,
схема управления функционированием управляет системой определения уровня, чтобы она оставалась в режиме зондирования, если амплитуда меньше или равна заранее заданной пороговой величине.
9. Система определения уровня по п. 7 или 8, дополнительно содержащая дискретизатор (55) реального времени, причем,
когда система определения уровня работает в режиме измерения,
дискретизатор реального времени дискретизирует принимаемое отражение передаваемого электромагнитного измерительного сигнала в реальном времени и предоставляет дискретизированный отраженный сигнал схеме определения уровня наполнения; и
схема определения уровня наполнения определяет уровень наполнения на основе соотношения по времени между переданным электромагнитным измерительным сигналом и дискретизированным отраженным сигналом.
| ПЕРЕДАТЧИК УРОВНЯ | 1996 |
|
RU2166737C2 |
| US 7551122 B1 23.06.2009 | |||
| Прибор для черчения эллипсов | 1926 |
|
SU5504A1 |
| US 5457990 A 17.10.1995 | |||
| US 7823446 B2 02.11.2010. | |||

