Область техники
Настоящее изобретение относится к радарному уровнемеру и способу, использующему электромагнитные волны для определения расстояния до поверхности продукта в резервуаре.
Уровень техники
С тех пор как в 1970-х и 1980-х годах радарные уровнемеры стали выпускать в качестве промышленных изделий, в областях применения, требующих высокой точности измерений, в основном использовали принцип непрерывного частотно-модулированного излучения НЧМИ (FMCW, Frequency Modulated Continuous Wave). Измерение с использованием принципа НЧМИ (FMCW) предусматривает передачу в резервуар сигнала с качанием частоты в диапазоне порядка нескольких ГГц. Например, сигнал может быть в диапазоне от 9 до 11 ГГц или от 24 до 27 ГГц. Переданный сигнал отражается от поверхности содержимого резервуара (или любого другого импедансного переходного участка), причем обратно в датчик возвращается эхо-сигнал, поступающий с некоторой задержкой по времени. Эхо-сигнал смешивается с переданным сигналом с образованием смешанного сигнала, имеющего частоту, равную изменению частоты переданного сигнала, которое происходит в течение указанной задержки во времени. Из-за линейности качания данная разностная частота, также известная как промежуточная частота, оказывается пропорциональной расстоянию до отражающей поверхности. При этом смешанный сигнал часто называют сигналом промежуточной частоты.
За последние годы принцип НЧМИ (FMCW) был усовершенствован, и на сегодняшний день он предусматривает передачу не непрерывного сигнала качания, а сигнала с пошаговым изменением частоты и с по существу постоянной амплитудой. При смешивании переданного и принятого сигналов каждый шаг частоты обеспечит один постоянный фрагмент фрагментарно-постоянного сигнала промежуточной частоты, обеспечивая, тем самым, одну «пробу» сигнала промежуточной частоты. Для определения частоты фрагментарно-постоянного сигнала промежуточной частоты требуется число, N, частот, превышающее число, предусмотренное теоремой дискретизации. При этом расстояние до отражающей поверхности определяют с использованием частоты сигнала промежуточной частоты по аналогии с тем, как это происходит в традиционной системе НЧМИ (FMCW). Типичными значениями могут быть значения в 200-300 периодов промежуточной частоты на расстоянии 30 м, разделенных на 1000-1500 шагов. Следует отметить, что для обеспечения возможности цифровой обработки подвергать дискретизации можно также непрерывный сигнал промежуточной частоты, полученный при непрерывном качании частоты.
Несмотря на высокую точность, традиционные системы НЧМИ (FMCW) - как непрерывные, так и с пошаговым изменением - являются энергоемкими, что делает их непригодными для применения в случаях с ограниченной мощностью. К таким случаям можно, например, отнести случаи использования периферийных устройств, питаемых от двухпроводного интерфейса, такого как контур с 4-20 мА, и беспроводных устройств, питаемых от внутреннего источника питания (например, аккумуляторной батареи или солнечного фотогальванического элемента).
Одна из причин относительно высокого количества потребляемой мощности в традиционных системах НЧМИ (FMCW) заключается в необходимости изоляции переданных и принятых электромагнитных волн. Изоляцию можно улучшить, к примеру, за счет добавления дополнительной модуляции к сигналу качания частоты, что увеличит чувствительность системы. Однако, такая модуляция, как правило, требует дополнительных компонентов, то есть, дополнительного осциллятора и сумматора, и, соответственно, приводит к усложнению устройства и увеличению энергопотребления. Таким образом, существует необходимость в повышении указанной чувствительности для уменьшения энергопотребления без усложнения при этом устройства.
Раскрытие изобретения
Учитывая упомянутые выше требуемые свойства радарного уровнемера, основная задача настоящего изобретения заключается в том, чтобы обеспечить улучшение характеристик радарного уровнемера путем повышения его чувствительности и уменьшить энергопотребление радарного уровнемера за счет снижения излучаемой энергии.
Настоящее изобретение основано на осознании того, что при обеспечении электронных компонентов, входящих в состав радарного уровнемера, возможностью получения эффектов, которые обычно являются нежелательными, эти нежелательные эффекты фактически обеспечат дополнительную модуляцию и, тем самым, приведут к повышению чувствительности радарного уровнемера.
Согласно первому аспекту настоящего изобретения, эти и другие задачи решены посредством радарного уровнемера для измерения расстояния до поверхности продукта, находящегося в резервуаре, причем указанный радарный уровнемер содержит схему приемопередатчика, выполненную с возможностью передачи электромагнитного сигнала и приема электромагнитного обратного сигнала, отраженного от указанной поверхности, причем схема приемопередатчика содержит контур обратной связи стабилизации частоты, выполненный с возможностью создания электромагнитного сигнала передачи в виде сигнала качания частоты, первый смеситель, выполненный с возможностью смешивания сигнала передачи и обратного сигнала для получения первого сигнала промежуточной частоты, устройство распространения сигнала, выполненное с возможностью направления сигнала передачи к указанной поверхности и направления обратного сигнала к схеме приемопередатчика. Контур обратной связи стабилизации частоты намеренно выполнен с возможностью создания колебания, формирующего модуляцию сигнала качания частоты. Радарный уровнемер дополнительно содержит второй смеситель, выполненный с возможностью смешивания первого сигнала промежуточной частоты и целого кратного частоты синусоидальной модуляции для получения второго сигнала промежуточной частоты, и схему обработки, выполненную с возможностью определения расстояния на основе указанного второго сигнала промежуточной частоты.
Согласно второму аспекту настоящего изобретения указанные задачи решены посредством способа определения расстояния до поверхности продукта, находящегося в резервуаре. Указанный способ содержит следующие этапы: создают сигнал качания частоты в контуре обратной связи стабилизации частоты, выполненном с возможностью создания колебания, и, тем самым, формируют модуляцию сигнала качания частоты, передают электромагнитный сигнал передачи, содержащий указанный сигнал качания частоты, к указанной поверхности и принимают электромагнитный обратный сигнал, содержащий указанный сигнал качания частоты, отраженный от указанной поверхности, смешивают указанный обратный сигнал с сигналом передачи для получения первого сигнала промежуточной частоты, смешивают указанный первый сигнал промежуточной частоты с целым кратным частоты модуляции для получения второго сигнала промежуточной частоты, и определяют расстояние на основе указанного второго сигнала промежуточной частоты.
Модуляция, формируемая колебанием в контуре обратной связи, обеспечивает повышение чувствительности без необходимости добавления компонентов и, соответственно, без усложнения радарного уровнемера. Повышенная чувствительность достигается за счет получения сигнала промежуточной частоты с частотой, превышающей собственную частоту. Сигнал промежуточной частоты согласно настоящему изобретению будет содержать частоту синусоидальной модуляции и гармоники этой частоты (то есть целые кратные частоты синусоидальной модуляции) плюс обычную промежуточную частоту. Более высокие частоты промежуточного сигнала подавляют утечки из электроники и волноводов, а также снижают влияние помех, вызванных объектами, находящимися поблизости от устройства распространения сигнала. Повышенная чувствительность может составлять от 10 до 20 дБ.
Следует понимать, что второе смешивание, при котором происходит смешивание первого сигнала промежуточной частоты с целым кратным частоты синусоидальной модуляции, образует второй, отрегулированный сигнал промежуточной частоты, имеющий частоту, сравнимую с промежуточной частотой сигнала в традиционном радарном уровнемере НЧМИ (FMCW).
Настоящее изобретение основано на неожиданном, новом применении контура обратной связи стабилизации частоты. Традиционно, такой контур обратной связи используют для обеспечения гладкого и четко различимого изменения частоты при пошаговом изменении сигнала качания частоты. Соответственно, любое колебание стараются погасить в максимально возможной степени. В то же время, согласно настоящему изобретению контур обратной связи стабилизации частоты намеренно выполнен таким образом, чтобы вызывать колебание перед установкой на новую частоту. За счет обеспечения того, что длительность указанного колебания сопоставима с временем шага или временем пребывания на каждом шаге частоты, данное колебание можно использовать для обеспечения по существу синусоидальной модуляции частоты. Таким образом, контур обратной связи стабилизации частоты можно назвать «контуром обратной связи колебания частоты».
Контур обратной связи стабилизации частоты содержит параметры управления, в обычных условиях используемые для обеспечения того, чтобы пошаговое изменение частоты было как можно более линейным и не имело колебаний, то есть, для обеспечения четко различимых шагов при увеличении частоты. Диапазон частот контура обратной связи стабилизации частоты влияет на размер (то есть, диапазон частот) модуляции, а это значит, что более широкий диапазон частот позволит получить большие синусоидальные модуляции за пределами традиционно требуемого пошагового изменения частоты. Кроме того, указанный диапазон частот также определяет скорость цикла управления, то есть, время перед тем, как контур обратной связи стабилизации частоты достигнет «захвата» частоты, причем более узкий допустимый диапазон частот приведет к увеличению времени перед тем, как контур обратной связи стабилизации частоты достигнет «захвата», и наоборот, широкий допустимый диапазон частот приведет к уменьшению времени перед тем, как контур обратной связи стабилизации частоты достигнет «захвата». Частота, при которой контур обратной связи стабилизации частоты дискретизирует входной и выходной сигналы, определит частоту добавленной синусоидальной модуляции.
Соотношение между частотой дискретизации и диапазоном частот контура может составлять 10 или меньше, или даже 5 или меньше. Это можно реализовать путем задания частоты дискретизации на уровне менее 10 МГц, или даже менее 5 МГц. В одном из примеров, частота дискретизации контура обратной связи составляет всего 2 МГц. В другом примере, частота дискретизации контура обратной связи составляет всего 250 кГц.
Согласно одному из вариантов осуществления настоящего изобретения, соотношение между временем шага, или временем пребывания на шаге, для каждого шага сигнала качания частоты и продолжительность колебания выбирают так, чтобы модуляция была по существу непрерывной в пределах качания частоты. Таким образом, обеспечивается высокая чувствительность на всех участках качания частоты.
Кроме того, путем регулирования времени пребывания на шаге и, соответственно, частоты пошагового изменения, можно получить частоту модуляции, которая будет меньше частоты сравнения, за счет настройки отношения частоты сравнения и частоты пошагового изменения в виде рационального числа. Если отношение частоты сравнения и частоты пошагового изменения является целым числом, то частота модуляции для синусоидальной модуляции будет равна частоте сравнения. За счет настройки отношения частоты сравнения и частоты пошагового изменения в виде рационального числа, модуляция будет повторяться с частотой, равной указанной доле. Например, если отношение частоты сравнения и частоты пошагового изменения равна 6.4, что составляет 6 и 2/5, то рисунок модуляции будет повторяться с частотой, равной 1/5 частоты сравнения. Следует отметить, что предыдущие значения приведены лишь для примера, и в принципе любая произвольная частота модуляции может быть задана в пределах объема защиты настоящего изобретения.
Другие признаки и преимущества настоящего изобретения станут очевидны после изучения прилагаемой формулы и описания настоящего изобретения. Специалист в данной области техники понимает, что возможно комбинирование различных признаков для создания предпочтительных вариантов осуществления, отличных от тех, что раскрыты в нижеследующем описании, без выхода за пределы объема защиты настоящего изобретения.
Краткое описание чертежей
Эти и другие аспекты настоящего изобретения будут подробно описаны далее со ссылкой на прилагаемые чертежи, на которых проиллюстрирован один из предпочтительных вариантов осуществления настоящего изобретения.
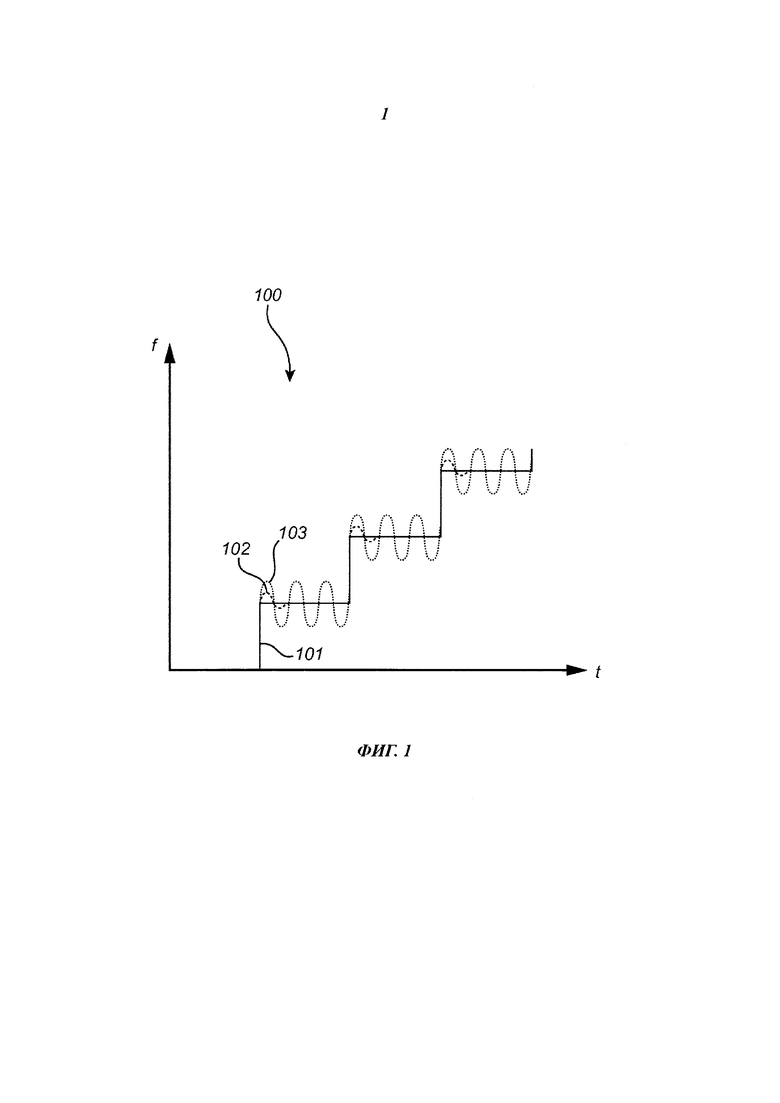
На фиг. 1 схематично проиллюстрировано качание частоты.
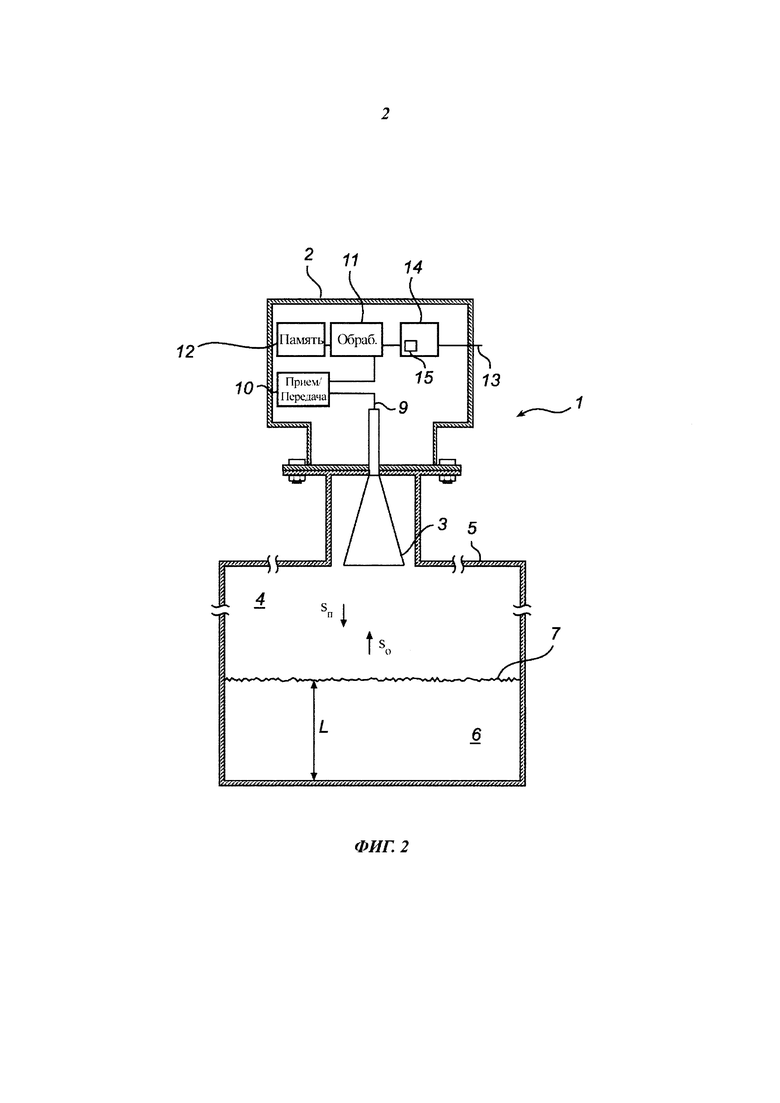
На фиг. 2 схематично в разрезе показан радарный уровнемер, пригодный для применения в настоящем изобретении.
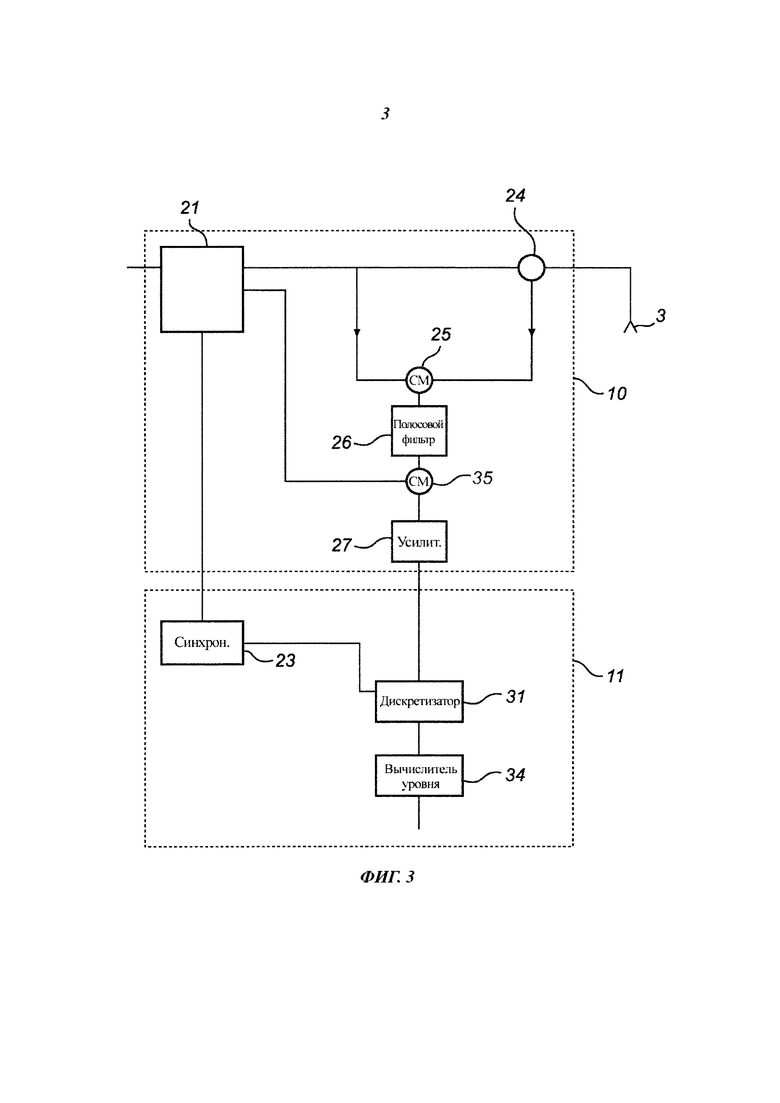
На фиг. 3 представлена структурная схема приемопередатчика и схема обработки радарного уровнемера, изображенного на фиг. 2, согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
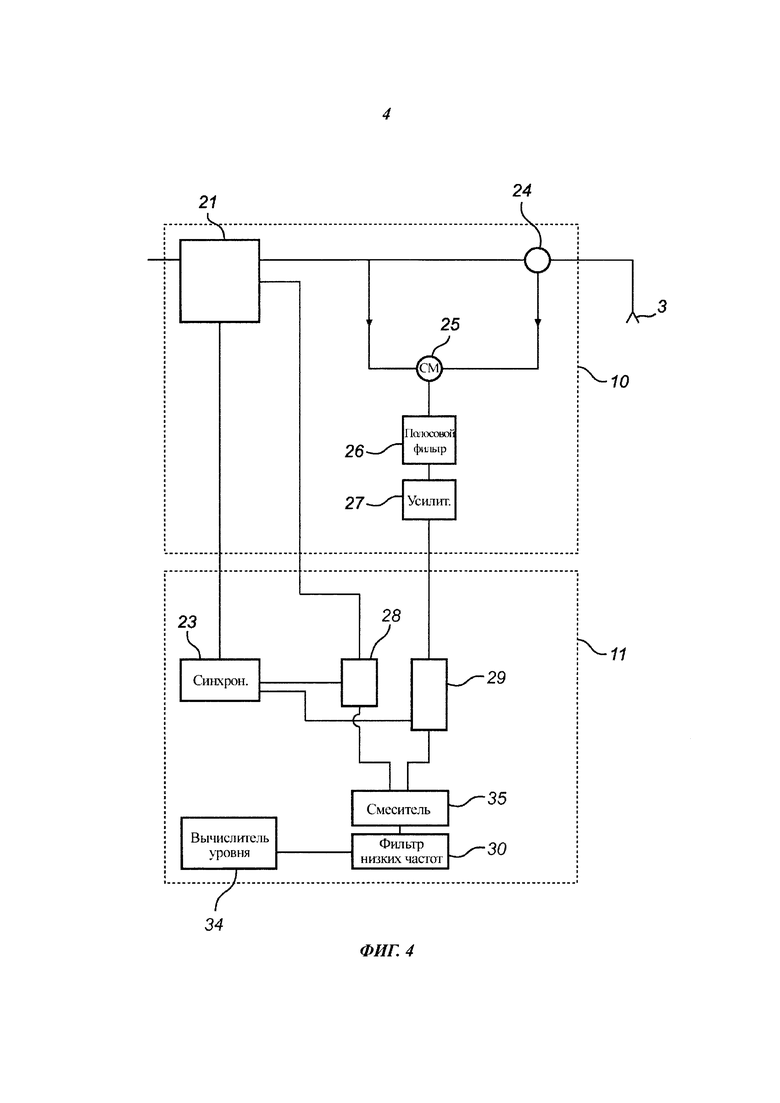
На фиг. 4 представлена альтернативная структурная схема приемопередатчика и схема обработки радарного уровнемера, изображенного на фиг. 2, согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
На фиг. 5 представлена блок-схема способа согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
На фиг. 6 представлена структурная схема микроволнового генератора, содержащего контур фазочастотной стабилизации в приемопередатчике, изображенном на фиг. 2.
Осуществление изобретения
В данном описании предпочтительные варианты осуществления настоящего изобретения раскрыты в основном применительно к радарному уровнемеру, имеющему антенну распространения сигналов в свободном пространстве для излучения и приема электромагнитного сигнала. Следует отметить, что это никоим образом не ограничивает объем настоящего изобретения, причем настоящее изобретение применимо в равной степени к другим устройствам распространения сигналов, в том числе к другим антеннам распространения сигналов в свободном пространстве, например, стержневой антенне, патч-антенне, фиксированной или подвижной параболической антенне или конической антенне, и к волноводам, например, успокоительной трубе, линии передачи или зонду, такому как однопроводный зонд (в том числе, так называемый зонд Губо), двухпроводный зонд или коаксиальный зонд.
Кроме того, в нижеследующем описании предпочтительные варианты осуществления настоящего изобретения раскрыты, в основном, применительно к радарному уровнемеру НЧМИ (FMCW), использующему пошаговое качание частоты. Следует отметить, что настоящее изобретение является предпочтительным в любой дискретизированной системе НЧМИ (FMCW), например, системе НЧМИ (FMCW), использующей непрерывное качание частоты, или даже в других типах радарных систем, использующих качание частоты.
Принципы настоящего изобретения можно легко понять при рассмотрении фиг. 1, на которой схематично показан график 100 качания частоты, причем частота показана в зависимости от времени. Непрерывная линия 101 демонстрирует идеальное пошаговое качание 101 частоты, причем качание частоты является линейным, а каждое пошаговое изменение частоты показано в виде отдельного шага до более высокой частоты. Пунктирная линия 102 демонстрирует колебание, которое может происходить в результате неприемлемой регулировки контура обратной связи стабилизации частоты. Колебание, представленное пунктирной линией 102, может увеличить время на каждом шаге частоты, поскольку колебание будет зарегистрировано как ошибка до стабилизации и последующего пошагового увеличения частоты контуром обратной связи стабилизации частоты. Таким образом, для сведения к минимуму колебания, представленного пунктирной линией 102, для того, чтобы обеспечить наиболее короткий временный интервал на каждом шаге, обычно тратят время и энергию. Пунктирная линия 103 на фиг. 1 иллюстрирует колебание согласно настоящему изобретению, то есть, добавленную синусоидальную модуляцию 103. Колебание, которое обеспечивает синусоидальную модуляцию 103, получают путем выполнения контура обратной связи стабилизации частоты определенным образом. Следует отметить, что амплитуда синусоидальной модуляции 103 и ее частота представлены на фиг. 1 лишь схематично. Как будет подробно описано далее, типичный размер шага частоты имеет порядок МГц. Амплитуда синусоидальной модуляции 103, как правило, имеет порядок МГц, а частота синусоидальной модуляции обычно составляет от 200 до 400 кГц и меньше.
На фиг. 2 схематично показан радарный уровнемер 1 согласно одному из предпочтительных вариантов осуществления настоящего изобретения, содержащий измерительный электронный блок 2 и устройство распространения сигнала, в данном случае рупорную антенну 3. Радарный уровнемер 1 расположен на резервуаре 5, частично заполненном измеряемым продуктом 6. Продукт 6, находящийся в резервуаре, представляет собой жидкость, жидкий газ, или даже твердое вещество, например, в виде гранул или пластмассовых шариков. Способ измерения по принципу НЧМИ (FMCW) обеспечивает относительно высокую чувствительность измерения радарным уровнемером, позволяя получить надежные результаты измерения даже в случае, когда в резервуаре присутствуют мешающие предметы. Путем анализа переданного сигнала SП, излучаемого антенной 3 в направлении поверхности 7 продукта 6, а также эхо-сигнала SO, движущегося обратно от поверхности 7, измерительный электронный блок 2 может определить расстояние между опорным положением и поверхностью 7 продукта 6, причем может быть найден также уровень L заполнения. Следует отметить, что, несмотря на то, что в описании указан резервуар 5, содержащий один продукт 6, аналогичным образом можно измерить расстояние до поверхности любого материала, находящегося в резервуаре 5. Кроме того, переданный сигнал SП, излучаемый антенной 3 в направлении поверхности 7, часто имеет частотный спектр от 9 до 11 ГГц или частотный спектр от 24 до 27 ГГц.
Как схематично показано на фиг. 2, электронный блок 2 содержит приемопередатчик 10 для передачи и приема электромагнитного сигнала, соединенный в данном случае с антенной 3 посредством волновода 9. Следует отметить, что антенна 3 опционально может быть соединена напрямую со схемой приемопередатчика, или соединена посредством подходящей сигнальной среды, например, коаксиального кабеля. Указанный блок 2 дополнительно содержит схему 11 обработки, соединенную с приемопередатчиком 10 для управления приемопередатчиком и обработки сигнала, полученного приемопередатчиком, для определения уровня заполнения продукта 6 в резервуаре 5. Схема 11 обработки также соединена с памятью 12, в которой хранятся любые программные средства для функционирования радарного уровнемера 1 и которая также имеет ОЗУ (RAM), используемое во время эксплуатации.
Схема 11 обработки дополнительно выполнена с возможностью соединения с внешними линиями 13 связи для аналоговой и/или цифровой связи через интерфейс 14. Например, связь между интерфейсом 14 связи и внешней станцией управления (не показана) может быть реализована посредством двухпроводного интерфейса, имеющего комбинированную функцию передачи результата измерения в указанную станцию управления и получения питания для функционирования уровнемера 1. Такой двухпроводный интерфейс может обеспечить более-менее постоянное питание, при этом результат измерения может быть наложен на напряжение питания с использованием цифрового протокола, например, протокола Fieldbus Foundation или HART. Альтернативно, ток в линиях регулируют в зависимости от доминирующего результата измерения. Примером такого интерфейса является промышленный контур с током 4-20 мА, где ток регулируется в диапазоне от 4 до 20 мА, в зависимости от результата измерения. Альтернативно, радарный уровнемер 1 может беспроводным способом осуществлять связь со станцией управления, например, по беспроводному протоколу HART, и использовать локальный источник питания (не показан) с аккумуляторными батареями или другое средство подачи питания для автономного функционирования.
Интерфейс 14 в данном случае содержит схему управления питанием, включающую в себя накопитель 15 энергии для хранения энергии во время периодов, когда микроволновой генератор не включен, что позволяет потреблять больше энергии в периоды, когда микроволновой генератор включен (то есть, во время качания). За счет такого управления питанием можно получить более низкое среднее потребление питания, причем по-прежнему возможны короткие периоды с более высоким потреблением питания. Накопитель 15 энергии может содержать конденсатор, и может быть ограничен требованиями к размерам, а также требованиями по искробезопасности (применяемыми в случае, когда уровнемер 1 расположен в опасной зоне резервуара с взрывоопасным или воспламеняющимся содержимым).
Хотя на фиг. 2 они показаны в виде отдельных блоков, несколько приемопередатчиков 10, схема 11 обработки и интерфейс 14 могут быть выполнены на одной и той же монтажной плате или даже в одной и той же схеме.
На фиг. 3 более подробно показана структурная схема приемопередатчика 10 и схема 11 обработки, изображенные на фиг. 2, согласно одному из предпочтительных вариантов осуществления настоящего изобретения.
Приемопередатчик 10 в данном случае содержит микроволновой генератор 21, управляемый, в свою очередь, схемой 23 синхронизации, образующей часть схемы 11 обработки. Микроволновой генератор 21 соединен с антенной 3 через делитель 24 мощности и с первым смесителем 25. Делитель 24 мощности предназначен для соединения обратного сигнала от антенны с первым смесителем 25 для того, чтобы обеспечить возможность первому смесителю 25 смешивать переданный сигнал из микроволнового генератора 21 с обратным сигналом и получать сигнал промежуточной частоты. Первый смеситель 25 соединен с полосовым фильтром 26, который, в свою очередь, соединен со вторым смесителем 35. Второй смеситель 35 также соединен с микроволновым генератором 21 для приема сигнала, отражающего целые кратные частоты синусоидальной модуляции, и смешивания сигнала промежуточной частоты с сигналом от микроволнового генератора 21 для получения отрегулированного сигнала промежуточной частоты. При этом второй смеситель 35 дополнительно соединен с усилителем 27.
Схема 11 обработки в данном случае содержит, в дополнении к упомянутой выше схеме 23 синхронизации, дискретизатор 31, выполненный с возможностью приема и дискретизации сигнала от усилителя 27. Указанный дискретизатор может содержать схему дискретизации с запоминанием отсчетов в комбинации с аналого-цифровым преобразователем, или может быть выполнен в виде сигма-дельта аналого-цифрового преобразователя. Дискретизатором 31 управляет схема синхронизации для его синхронизации с измерительным сигналом. И наконец, схема обработки содержит блок 34 вычисления уровня, соединенный с дискретизатором 31.
Элементы приемопередатчика, в основном, реализованы в аппаратных средствах и образуют часть цельного блока, обычно называемого микроволновым генератором, при этом по меньшей мере некоторые из участков схемы 11 обработки, как правило, реализованы программными модулями, исполняемыми встроенными процессорами. Настоящее изобретение не ограничивается данным конкретным вариантов реализации, и может быть рассмотрен любой вариант осуществления, который считается пригодным для реализации описанных в данном описании функциональных возможностей.
На фиг. 4 подробно показана структурная схема приемопередатчика 10 и схема 11 обработки согласно другому варианту осуществления настоящего изобретения. Приемопередатчик, изображенный на фиг. 4, аналогичен приемопередатчику согласно варианту, представленному на фиг. 3, за исключением тракта прохождения сигнала после полосового фильтра 26. Полосовой фильтр 26 на фиг. 4 напрямую соединен с усилителем 27.
В данном случае схема 11 обработки содержит первый дискретизатор 28, выполненный с возможностью приема сигнала, представляющего частоту синусоидальной модуляции, от микроволнового генератора 21, и второй дискретизатор 29, выполненный с возможностью приема сигнала промежуточной частоты от усилителя 27. Первый дискретизатор 28 и второй дискретизатор 29 также выполнены с возможностью приема сигнала синхронизации от схемы 23 синхронизации для синхронизации дискретизации с сигналом измерения. Упомянутые выше дискретизаторы могут содержать схемы дискретизации с запоминанием отсчетов в комбинации с аналого-цифровыми преобразователями, или могут быть выполнены в виде сигма-дельта аналого-цифровых преобразователей. Дискретизированные сигналы из первого дискретизатора 28 и второго дискретизатора 29 подаются во второй смеситель 35, выполненный с возможностью выдачи отрегулированного сигнала промежуточной частоты. Второй смеситель 35 соединен с фильтром 30 низких частот, который, в свою очередь, соединен с блоком 34 вычисления уровня, выполненным с возможностью определения указанного расстояния.
Следует понимать, что некоторые из компонентов, изображенных на фиг. 4, встроенные в схему 11 обработки, по сравнению с их относительным размещением в варианте осуществления на фиг. 3, частично или полностью реализованы в виде программных модулей или блоков. Например, второй смеситель 35, который в данном случае принимает от первого дискретизатора 28 дискретизированный сигнал, представляющий частоту синусоидальной модуляции, и от второго дискретизатора 29 второй сигнал, представляющий сигнал промежуточной частоты, может смешивать их в цифровом виде, тем самым, обеспечивая возможность дальнейшего усиления или фильтрации сигнала по известным алгоритмам обработки сигналов. Кроме того, используя достаточную вычислительную мощность схемы обработки, может быть достаточным дискретизировать сигнал от усилителя 27 во втором дискретизаторе 29 и получить отрегулированный сигнал промежуточной частоты путем вычисления частоты синусоидальной модуляции посредством алгоритмов обработки сигналов, например, преобразования Фурье или аналогичным способом.
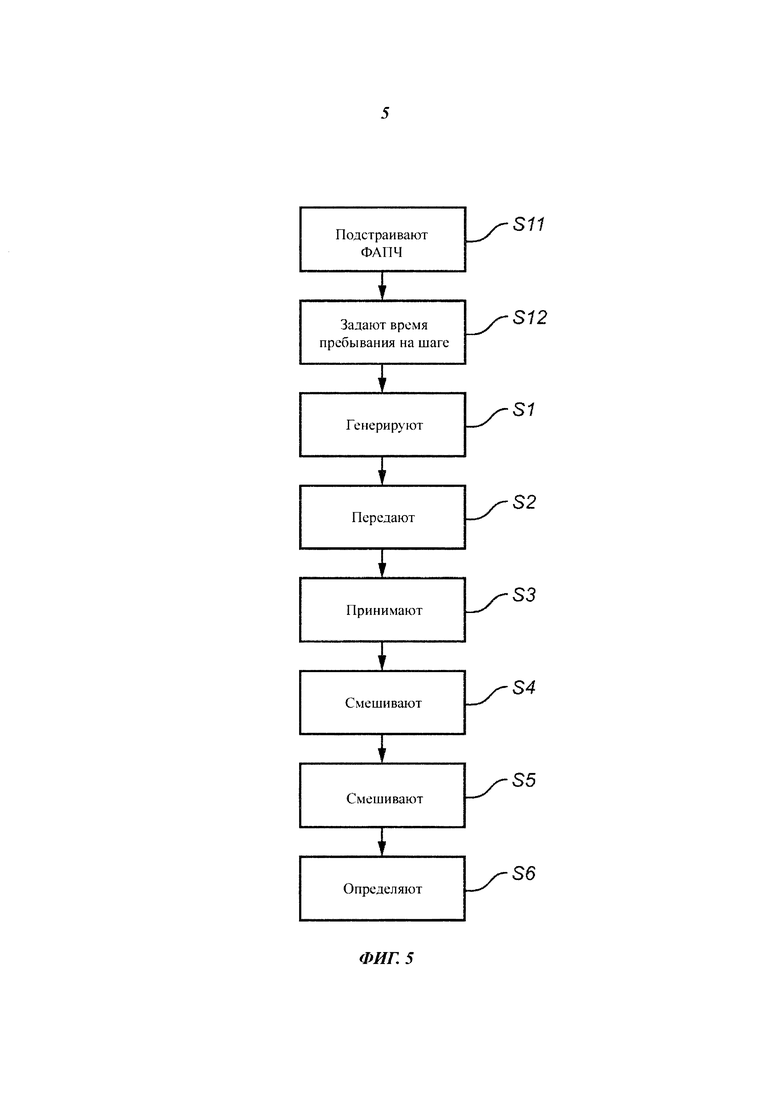
На фиг. 5 проиллюстрирован способ измерения расстояния до поверхности продукта согласно одному из предпочтительных вариантов осуществления настоящего изобретения в виде блок-схемы. Сначала будут раскрыты этапы S1-S6 предлагаемого способа, затем со ссылкой на фиг. 6 будут описаны этапы S11 и S12.
Сначала на этапе S1 схема 23 синхронизации управляет микроволновым генератором 21 для выдачи измерительного сигнала в виде сигнала пошагового качания частоты. Сигнал пошагового качания частоты создают в микроволновом генераторе 21, содержащем контур обратной связи стабилизации частоты. Измерительный сигнал в обычных условиях может быть разбит на подходящие шаги от низкой частоты до высокой частоты. В альтернативном варианте измерительный сигнал может быть разбит на шаги от высокой частоты до низкой частоты, или шаги частоты могут быть выбраны в произвольном порядке. Например, сигнал качания частоты может иметь диапазон частот порядка нескольких ГГц (например, 0.2-6 ГГц), при этом средняя частота имеет порядок 25 ГГц или 10 ГГЦ. Количество шагов N при качании может быть в диапазоне 100-4000, обычно 200-2000, и может составлять примерно 1000 для заданного диапазона в 30 м. Таким образом, размер каждого шага (Δf) частоты будет иметь порядок МГц. В случаях применения в условиях ограниченной мощности, продолжительность качания ограничена, и, как правило, имеет порядок от 0 до 100 мс. Например, продолжительность качания может составлять примерно 30 мс, причем при количестве шагов частоты равном 1000 (то есть, N=1000), продолжительность каждого шага будет порядка 30 мкс, или частота обновления будет примерно 30 кГц. Контур обратной связи стабилизации частоты выполнен с возможностью создания колебания, формирующего синусоидальную модуляцию сигнала пошагового качания частоты.
Во-вторых, на этапе S2, измерительный сигнал от микроволнового генератора 21 излучается в резервуар 5 в виде электромагнитного сигнала SП передачи антенной 3 в направлении поверхности 7.
Далее, на этапе S3, антенна 3 принимает обратный сигнал SO, движущийся обратно от поверхности 7 после отражения, и отправляет его вдоль волновода 9 в приемопередатчик 10 и, соответственно, делитель 24 мощности. На этапе S4 обратный сигнал SО отправляют через делитель 24 мощности в первый смеситель 25 и смешивают с измерительным сигналом для получения сигнала промежуточной частоты. Обычно сигнал промежуточной частоты представляет собой фрагментарно-постоянный колебательный сигнал, с частотой, пропорциональной расстоянию до отражающей поверхности, причем фрагментарно-постоянная длина равна длине шага измерительных сигналов. Типичная частота имеет порядок кГц, например, менее 100 кГц, как правило, менее 15 кГц. Сигнал промежуточной частоты согласно настоящему изобретению, однако, будет иметь более высокую частоту, пропорциональную промежуточному сигналу плюс кратным частоте синусоидальной модуляции, что потребует второго шага смешивания для демодуляции сигнала промежуточной частоты. Целые кратные частоты синусоидальной модуляции созданы в виде гармоник частоты синусоидальной модуляции в результате применения функций Бесселя. Следует отметить, что энергия, переданная в электромагнитном сигнале SП передачи, будет разделена между этими гармониками, однако повышение чувствительности более чем компенсирует разделение переданной энергии.
Далее, на этапе S5, сигнал промежуточной частоты от первого смесителя 25, прошедший через полосовой фильтр 26, настроенный на пропуск сигналов промежуточной частоты с конкретной частотой, соответствующей по меньшей мере одному из целых кратных частоты синусоидальной модуляции, смешивают с целым кратным частоты синусоидальной модуляции вторым смесителем 35 для получения отрегулированной промежуточной частоты. Таким образом, целое кратное, соответствующее той же самой частоте, предназначенной для полосового фильтра 27, предпочтительно используют для демодуляции и получения отрегулированного сигнала промежуточной частоты.
Отрегулированный сигнал промежуточной частоты имеет частоту, пропорциональную расстоянию до отражающей поверхности, и имеет порядок кГц, например, менее 100 кГц, обычно составляет менее 15 кГц.
Альтернативно, второй смеситель 35 может быть реализован в схеме обработки в виде программного средства, при этом обратный сигнал S0 смешивают с измерительным сигналом в первом смесителе 25, а сигнал промежуточной частоты дискретизируют в схеме 11 обработки до смешивания во втором смесителе 35 для получения отрегулированного сигнала промежуточной частоты в схеме обработки. Кроме того, если второй смеситель 35 реализован в виде программного средства, частота синусоидальной модуляции от микроволнового генератора 21 во втором смесителе 35 может не понадобиться. За счет выполнения второго смесителя в виде программного средства, можно применить неиспользованную обрабатывающую способность, имеющуюся в схеме 11 обработки, для осуществления демодуляции промежуточного сигнала в отрегулированный промежуточный сигнал, причем информация, изначально имеющаяся в схеме 11 обработки сигнала синхронизации от схемы 23 синхронизации, будет использована для демодуляции сигнала промежуточной частоты без добавления дополнительных компонентов в систему.
Далее, на этапе S6, схема 11 обработки принимает усиленный отрегулированный сигнал промежуточной частоты, дискретизирует и преобразует его в аналого-цифровую форму посредством дискретизатора 31. Частота дискретизации аналого-цифрового преобразователя 30 предпочтительно в достаточной мере близка к скорости обновления измерительного сигнала, для дискретизации каждого шага измерительного сигнала один и только один раз.
Вектор дискретизации, полученный в результате дискретизации, подают в блок 34 вычисления уровня, который определяет частоту отрегулированного сигнала промежуточной частоты, на основе указанного вектора дискретизации, после чего определяют расстояние до отражающей поверхности (и впоследствии уровень заполнения продукта в резервуаре) на основе частоты отрегулированного сигнала промежуточной частоты.
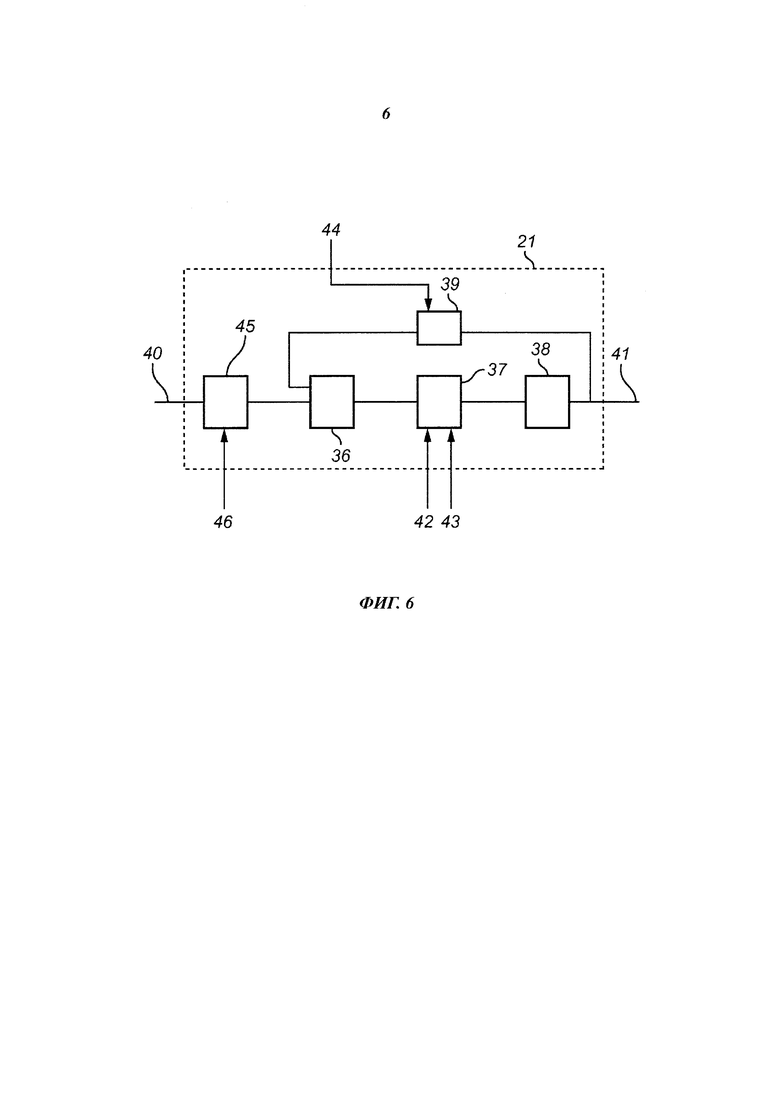
На фиг. 6 подробно показан микроволновой генератор 21. Указанный микроволновой генератор 21 содержит фазочастотный детектор 36, контурный фильтр 37, управляемый напряжением осциллятор 38, делитель 39 частоты обратной связи и частотный делитель 45. Микроволновой генератор 21 во время эксплуатации принимает сигнал 40 от схемы синхронизации, имеющий частоту синхронизации. Частота синхронизации может быть разделена частотным делителем 45 до обнаружения фазочастотным детектором 36. Фазочастотный детектор обнаруживает и сравнивает частоту сигнала 40 от частотного делителя 45 с сигналом, выданным управляемым напряжением осциллятором 38 и разделенным делителем 39 частоты обратной связи, и выдает ошибку, пропорциональную разнице между фазами сигнала 40 от частотного делителя 45 и сигнала от делителя 39 частоты обратной связи. Далее сигнал ошибки фильтруют в контурном фильтре 37 и используют для приведения в действие управляемого напряжением осциллятора 38, который создает выходной сигнал 41, имеющий выходную частоту. Выходной сигнал 41 возвращают в фазочастотный детектор 36 через частотный делитель 39, тем самым, создавая отрицательную обратную связь; в результате, если частота выходных сигналов 41 будет сдвинута, сигнал ошибки увеличится и вернет ее к правильному значению. Посредством контура 36, 37, 38 и 39 обратной связи выходной сигнал 41 от микроволнового генератора 21 «замыкается» на входном сигнале 40 из схемы 23 синхронизации. Следует отметить, что выходная частота обычно не равняется частоте входного сигнала. Частотный делитель 39 делит выходной сигнал на целое число N или на дробную величину, в результате выходную частоту можно разбить на кратные целые (или на любое рациональное число при дробном делении) входного сигнала 40 для обеспечения сигнала пошагового качания частоты в качестве выходного сигнала 41 от микроволнового генератора 21.
Соответственно, также имеются параметры, которые можно задавать для контура обратной связи стабилизации частоты, представленного на фиг. 6. Одним из параметров является диапазон 42 частот контура обратной связи, который следует понимать, как установку диапазона частот контурного фильтра 37. Другим параметром для контура обратной связи стабилизации частоты является частота сравнения, которая представляет собой частоту входного сигнала 40 от схемы 23 синхронизации. Частота сравнения определяет частоту дискретизации фазочастотного детектора 36. На фиг. 6 показан частотный делитель 45, выполненный с возможностью деления частоты входного сигнала 40 из схемы 23 синхронизации; в результате, контролируя целое или дробное деление посредством сигнала 46 частотного делителя, управляют частотой сравнения. Кроме того, для определения устойчивости обратной связи можно задать запас 43 по фазе контурного фильтра 37. Еще один параметр, который также задан в микроволновом генераторе 21, представляет собой время 44 пребывания на шаге, то есть, количество времени до увеличения целого кратного частотного делителя и, соответственно, до достижения шагового изменения частоты выходного сигнала 41.
Диапазон 42 частот контура обратной связи регулирует размер сигнала ошибки, который выдает фазочастотный детектор, и в результате регулирует скорость управляющего контура вследствие того, что больший допустимый сигнал ошибки (то есть, более широкий диапазон частот) приводит к меньшему времени до того, как частота выходных сигналов 41 установится на уровне предполагаемой частоты. Обычно требуется высокая частота дискретизации для обеспечения того, чтобы пошаговое изменение сигнала пошагового качания частоты было четко различимым, а колебание было как можно более коротким. Однако, задавая низкую частоту сравнения за счет управления частотным делителем 45 или частотой входного сигнала из схемы 23 синхронизации так, что фазочастотный детектор 36 выполняет дискретизацию медленнее, чем требуется для различимого и гладкого пошагового изменения частоты, в сигнале качания частоты будет происходить колебание. Это колебание можно расценивать как эффект фазочастотной дискретизации. Кроме того, если упомянутая выше частота сравнения меньше в десять раз диапазона 42 частот контура обратной связи, то требуется больше времени для того, чтобы частота выходного сигнала 41 достигла предполагаемой частоты совместно с относительно низкой частотой дискретизации, в результате чего возникнет колебание, то есть, эффекты фазочастотной дискретизации.
Время 44 пребывания на шаге представляет собой время, потраченное на каждом шаге при пошаговом качании частоты до того, как частотный делитель 39 увеличит целое N до N+1 (или любого дробного значения), а это значит, что контур обратной связи стабилизации частоты попытается затребовать «захват» на следующем шаге пошагового качания частоты. Задавая время пребывания на шаге, можно обеспечить непрерывное колебание для формирования синусоидальной модуляции сигнала качания частоты, являющегося непрерывным. Кроме того, можно задать запас 43 по фазе для получения эффектов фазочастотной дискретизации или получить их совместно с диапазоном частот контура обратной связи стабилизации частоты и частотой сравнения.
Рассмотрим снова фиг. 5, на которой видно, что этап S11 предусматривает задание по меньшей мере одного из следующих параметров: диапазона 42 частот контура обратной связи, частоты сравнения или запаса 43 по фазе для создания колебания при установке на новой частоте.
Например, задают, что частота сравнения равна 2 МГц, а диапазон 42 частот контура равен 200 кГц. Запас по фазе равен от 35 до 70 градусов, например, 50 градусов. Другие значения также приемлемы, но, как правило, важно, чтобы частота сравнения (то есть, частота дискретизации контура) не намного превышала диапазон частот. В традиционном контуре обратной связи стабилизации частоты указанное соотношение может быть порядка 100. В данном случае, указанное соотношение, как правило, не должно быть больше фактора 10 или даже меньше. В некоторых вариантах осуществления настоящего изобретения используют частоту сравнения в диапазоне около 200 кГц.
Далее, на этапе S12 задают время 44 пребывания на шаге для обеспечения непрерывного колебания и, соответственно, непрерывной синусоидальной модуляции. Кроме того, как упомянуто выше, время 44 пребывания на шаге совместно с частотой сравнения можно использовать для управления частотой синусоидальной модуляции для обеспечения синусоидальной модуляции на, по существу, любой частоте.
Таким образом, этап S11 и этап S12 можно выполнять только после установки радарного уровнемера, или по мере необходимости, например, один раз в месяц или даже перед каждым качанием частоты, если это необходимо.
Контур обратной связи стабилизации частоты, изображенный на фиг. 6, может быть полностью или частично встроен в схему фазовой автоматической подстройки частоты ФАПЧ (PLL, Phase Locked Loop). Схемы фазовой автоматической подстройки частоты доступны на рынке в различном формате, например, аналоговом или цифровом, с частотными делителями 45 целых чисел или дробных чисел. Кроме того, коммерчески доступные схемы ФАПЧ (PLL) могут содержать питающий насос и/или частотный делитель 45. Делитель частоты сравнения обеспечивает легкое управление частотой сравнения путем деления частоты сравнения входного сигнала до его входа в контур обратной связи. Кроме того, частота колебания, то есть, частота модуляции, часто доступна на выходном штыревом контакте коммерческой схемы ФАПЧ (PLL), которую предпочтительно можно использовать для соединения микроволнового генератора 21 и второго смесителя 35.
Хотя на чертежах может быть представлен конкретный порядок выполнения этапов способа, порядок этапов может отличаться от проиллюстрированного на фигурах. Кроме того, два или более этапов могут быть выполнены параллельно или частично параллельно. Такие варианты будут зависеть от выбранных программных или аппаратных средств или от выбора разработчика. Все такие варианты подпадают под объем защиты настоящего изобретения. По аналогии, реализация программных средств может быть выполнена с помощью стандартных программных технологий с основанной на правилах логикой и другой логикой для осуществления различных соединительных этапов, обрабатывающих этапов, сравнительных этапов и этапов принятия решения. Кроме того, несмотря на то, что настоящее изобретение было описано применительно к конкретным предпочтительным вариантам его осуществления, специалистам в данной области техники будут очевидны различные альтернативные варианты, модификации и т.д. Специалисту в данной области техники при реализации на практике заявленного изобретения, после изучения чертежей, описания и прилагаемой формулы станут понятны и могут быть внесены различные изменения в раскрытые выше варианты осуществления настоящего изобретения. Более того, в пунктах формулы слово «содержащий» не исключает наличие других компонентов или этапов, а неопределенный артикль «a» и «an» не исключает их множества.
Настоящее изобретение относится к радарному уровнемеру и способу измерения расстояния до поверхности продукта, находящегося в резервуаре. Предлагаемый радарный уровнемер содержит схему приемопередатчика, выполненную с возможностью передачи и приема электромагнитных сигналов, причем указанная схема приемопередатчика содержит контур обратной связи стабилизации частоты, выполненный с возможностью создания электромагнитного сигнала передачи в виде сигнала качания частоты. Указанный контур обратной связи стабилизации частоты предназначен для создания колебания, формирующего синусоидальную модуляцию сигнала качания частоты. Радарный уровнемер дополнительно содержит второй смеситель, выполненный с возможностью смешивания сигнала промежуточной частоты и целого кратного частоты синусоидальной модуляции для получения отрегулированного сигнала промежуточной частоты, и схему обработки, выполненную с возможностью определения указанного расстояния на основе указанного отрегулированного сигнала промежуточной частоты. Техническим результатом при реализации заявленного решения является повышенная чувствительность предлагаемого способа определения расстояния до поверхности продукта, находящегося в резервуаре, и радарного уровнемера за счет получения сигнала качания частоты, содержащего синусоидальную модуляцию. 2 н. и 12 з.п. ф-лы, 6 ил.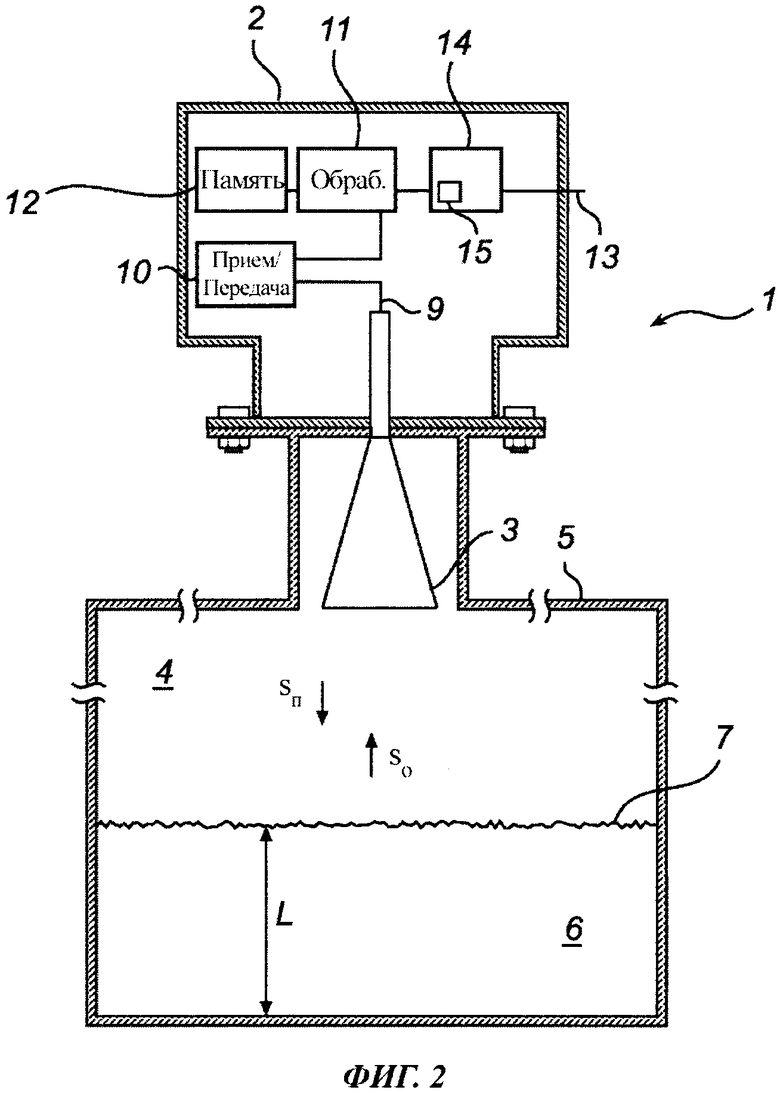
1. Радарный уровнемер (1) для определения расстояния до поверхности (7) продукта (6) в резервуаре (5), причем указанный радарный уровнемер содержит
схему (10) приемопередатчика, выполненную с возможностью передачи электромагнитного сигнала (Sп) передачи и приема электромагнитного обратного сигнала (So), отраженного от указанной поверхности,
устройство (3) распространения сигнала, установленное с возможностью направления указанного сигнала передачи к указанной поверхности и направления указанного обратного сигнала к указанной схеме приемопередатчика, и
первый смеситель (25), выполненный с возможностью смешивания указанного сигнала передачи и указанного обратного сигнала для получения первого сигнала промежуточной частоты,
отличающийся тем, что указанная схема приемопередатчика содержит контур (21) обратной связи стабилизации частоты, выполненный с возможностью создания указанного электромагнитного сигнала передачи в виде сигнала качания частоты, причем указанный контур обратной связи стабилизации частоты содержит фазочастотный детектор (36), имеющий частоту сравнения, при этом соотношение между указанной частотой сравнения и диапазоном частот указанного контура обратной связи стабилизации частоты равно 10 или меньше, обеспечивая возможность создания колебания (103), приводящего к модуляции указанного сигнала качания частоты, причем указанный радарный уровнемер дополнительно содержит
второй смеситель (35), выполненный с возможностью смешивания указанного первого сигнала промежуточной частоты с сигналом, имеющим частоту, которая является целым кратным частоты указанной модуляции, для получения второго сигнала промежуточной частоты, и
схему (11) обработки, выполненную с возможностью определения указанного расстояния на основе указанного второго сигнала промежуточной частоты.
2. Радарный уровнемер по п. 1, отличающийся тем, что указанное соотношение достигается заданием по меньшей мере одного из следующих параметров: указанного диапазона частот контура и указанной частоты сравнения.
3. Радарный уровнемер по п. 1 или 2, отличающийся тем, что соотношение между указанной частотой сравнения и указанным диапазоном частот контура равно 5 или меньше.
4. Радарный уровень по п. 1, отличающийся тем, что указанная частота сравнения меньше 10 МГц, предпочтительно меньше 5 МГц.
5. Радарный уровнемер по п. 1 или 2, отличающийся тем, что соотношение между продолжительностью указанного колебания и временем шага для каждой частоты при указанном качании частоты таково, что указанная модуляция является, по существу, непрерывной в течение указанного качания частоты.
6. Радарный уровнемер по п. 1 или 2, отличающийся тем, что указанный контур обратной связи стабилизации частоты реализован в виде схемы фазовой автоматической подстройки частоты.
7. Радарный уровнемер по п. 1 или 2, отличающийся тем, что указанная модуляция является, по существу, синусоидальной.
8. Радарный уровнемер по п. 1 или 2, отличающийся тем, что указанное качание частоты происходит от 9 до 11 ГГц или от 25 до 27 ГГц.
9. Способ определения расстояния до поверхности (7) продукта (6), находящегося в резервуаре (5), причем указанный способ содержит следующие этапы:
передают (S2) электромагнитный сигнал передачи, содержащий сигнал качания частоты к указанной поверхности,
принимают (S3) электромагнитный обратный сигнал, содержащий указанный сигнал качания частоты, отраженный от указанной поверхности, и смешивают (S4) указанный обратный сигнал с указанным сигналом передачи для получения первого сигнала промежуточной частоты,
отличающийся тем, что указанный способ дополнительно содержит следующие этапы:
создают (S1) сигнал качания частоты в контуре обратной связи стабилизации частоты, содержащем фазочастотный детектор (36), имеющий частоту сравнения,
задают (S11) по меньшей мере один из следующих параметров: указанную частоту сравнения и диапазон частот указанного контура обратной связи стабилизации частоты, таким образом, что соотношение между частотой сравнения и диапазоном частот контура равно 10 или меньше, с целью создания колебания, и тем самым приводя к модуляции указанного сигнала качания частоты,
смешивают (S5) указанный первый сигнал промежуточной частоты с целым кратным частоты указанной модуляции для получения второго сигнала промежуточной частоты и
определяют (S6) указанное расстояние на основе указанного второго сигнала промежуточной частоты.
10. Способ по п. 9, отличающийся тем, что соотношение между указанной частотой сравнения и указанным диапазоном частот контура составляет 5 или меньше.
11. Способ по п. 9, отличающийся тем, что указанная частота сравнения меньше 10 МГц, предпочтительно меньше 5 МГц.
12. Способ по п. 9, отличающийся тем, что соотношение между продолжительностью указанного колебания и временем шага для каждой частоты при указанном качании частоты таково, что указанная модуляция является, по существу, непрерывной в течение указанного качания частоты.
13. Способ по п. 9, отличающийся тем, что указанная модуляция, по существу, является синусоидальной.
14. Способ по п. 9, отличающийся тем, что указанное качание частоты происходит от 9 до 11 ГГц или от 25 до 27 ГГц.
| US 2012169528 A1, 05.07.2012 | |||
| US 2012299767 A1, 29.11.2012 | |||
| US 5406842 A, 18.04.1995 | |||
| EP 1069438 A1, 17.01.2001. |

